Інерціальний вимірювальний блок
Номер патенту: 55276
Опубліковано: 10.12.2010
Автори: Кописов Олег Едуардович, Пономарьов Вадим Сергійович, Гордін Олександр Григорович

Формула / Реферат
1. Інерціальний вимірювальний блок, що містить як вимірювачі три однокомпонентних гіроскопічних датчики кутової швидкості, три однокомпонентних маятникових акселерометри, який відрізняється тим, що в нього введені додаткові однокомпонентний гіроскопічний датчик кутової швидкості і однокомпонентний маятниковий акселерометр та система обробки інформації, а осі чутливості всіх вимірювачів розташовані по твірних конуса та мають спільний початок на осі конуса.
2. Інерціальний вимірювальний блок за п. 1, який відрізняється тим, що система обробки інформації включає вісім обчислювальних пристроїв, що використовують інформацію вимірювачів, вхід першого з обчислювальних пристроїв з'єднаний з виходами першого, другого і третього гіроскопічних датчиків кутової швидкості через перший, другий та третій керовані ключі управління вимірювачами відповідно, вхід другого - з виходами другого, третього і четвертого гіроскопічних датчиків кутової швидкості через другий, третій та четвертий керовані ключі управління вимірювачами, вхід третього - з виходами першого, третього і четвертого гіроскопічних датчиків кутової швидкості через перший, третій та четвертий керовані ключі управління вимірювачами, вхід четвертого - з виходами першого, другого і четвертого гіроскопічних датчиків кутової швидкості через перший, другий та четвертий керовані ключі управління вимірювачами, вхід п'ятого - з виходами першого, другого і третього однокомпонентних маятникових акселерометрів через п'ятий, шостий та сьомий керовані ключі управління вимірювачами, вхід шостого - з виходами другого, третього і четвертого однокомпонентних маятникових акселерометрів через шостий, сьомий та восьмий керовані ключі управління вимірювачами, вхід сьомого - з виходами першого, третього і четвертого однокомпонентних маятникових акселерометрів через п'ятий, сьомий та восьмий керовані ключі управління вимірювачами, вхід восьмого - з виходами першого, другого і четвертого однокомпонентних маятникових акселерометрів через п'ятий, шостий та восьмий керовані ключі управління вимірювачами, три блоки ідентифікації відмов гіроскопічних датчиків кутової швидкості по кожному компоненту вектора кутової швидкості відповідно, входи першого, другого і третього з яких з'єднані з виходами першого, другого, третього та четвертого обчислювальних пристроїв, три блоки ідентифікації відмов однокомпонентних маятникових акселерометрів по кожному компоненту вектора уявного прискорення відповідно, входи першого, другого і третього з яких з'єднані з виходами п'ятого, шостого, сьомого та восьмого обчислювальних пристроїв, три блоки оцінки компонентів вектора кутової швидкості при всіх справних гіроскопічних датчиках кутової швидкості, входи першого, другого та третього з яких з'єднані з виходами першого, другого і третього обчислювальних пристроїв, три блоки оцінки компонентів вектора уявного прискорення при всіх справних однокомпонентних маятникових акселерометрах, входи першого, другого та третього з яких з'єднані з виходами четвертого, п'ятого і шостого обчислювальних пристроїв, шість ідентичних систем ключів, що забезпечують видачу на вихід інерціального вимірювального блока трьох компонентів вектора кутової швидкості та трьох компонентів вектора уявного прискорення для будь-якого з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, причому кожна система містить у своєму складі п'ять ключів, керуючий вхід кожного з яких з'єднаний з відповідним виходом кожного блока ідентифікації відмов вимірювачів, а інформаційний вхід першого ключа кожної системи з'єднаний з виходом відповідного блока оцінки компонентів вектора, що вимірюється, інформаційні входи другого, третього, четвертого та п'ятого ключів кожної системи з'єднані з виходами обчислювальних пристроїв, чотирнадцять логічних елементів Або, які безпосередньо формують три компоненти вектора кутової швидкості та три компоненти вектора уявного прискорення та інформацію про вимірювач, що відмовив, причому входи шести логічних елементів Або з'єднані з виходами першої, другої, третьої, четвертої, п'ятої та шостої систем ключів, а входи восьми інших логічних елементів Або з'єднані з виходами блоків ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, а виходи цих восьми логічних елементів Або з'єднані з входами двох блоків резервування вимірювачів, виходи блоків резервування з'єднанні з керуючими входами ключів управління вимірювачами, кожний з восьми керованих ключів управління вимірювачами має інформаційний вхід, який з'єднаний з одним із восьми вимірювачів, та керуючий вхід, вихід кожного з керованих ключів управління вимірювачами з'єднаний з відповідними входами обчислювальних пристроїв.
3. Інерціальний вимірювальний блок за п. 2, який відрізняється тим, що кожний блок ідентифікації відмов вимірювачів містить шість допускових компараторів, входи кожного з яких з'єднані з однією із шести можливих пар сполучень вихідних сигналів одного компонента вектора кутової швидкості або вектора уявного прискорення, які формуються за допомогою чотирьох обчислювальних пристроїв: першого допускового компаратора - першого та другого, другого - першого та третього, третього - першого та четвертого, четвертого - другого та третього, п'ятого - другого та четвертого, шостого - третього та четвертого, а вихідні сигнали компараторів - один позитивний, що відповідає збігу вхідних сигналів у межах прийнятого допуску, другий негативний, який відповідає їх різниці у межах встановленого допуску - з'єднані з входами п'яти логічних елементів І, кожний з яких відповідає певному сполученню позитивних та негативних вхідних сигналів і одному з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, по відповідному компоненту вектора кутової швидкості або вектора уявного прискорення, причому виходи логічних елементів І з'єднані з керуючими входами відповідної системи ключів та входами логічних елементів Або.
Текст
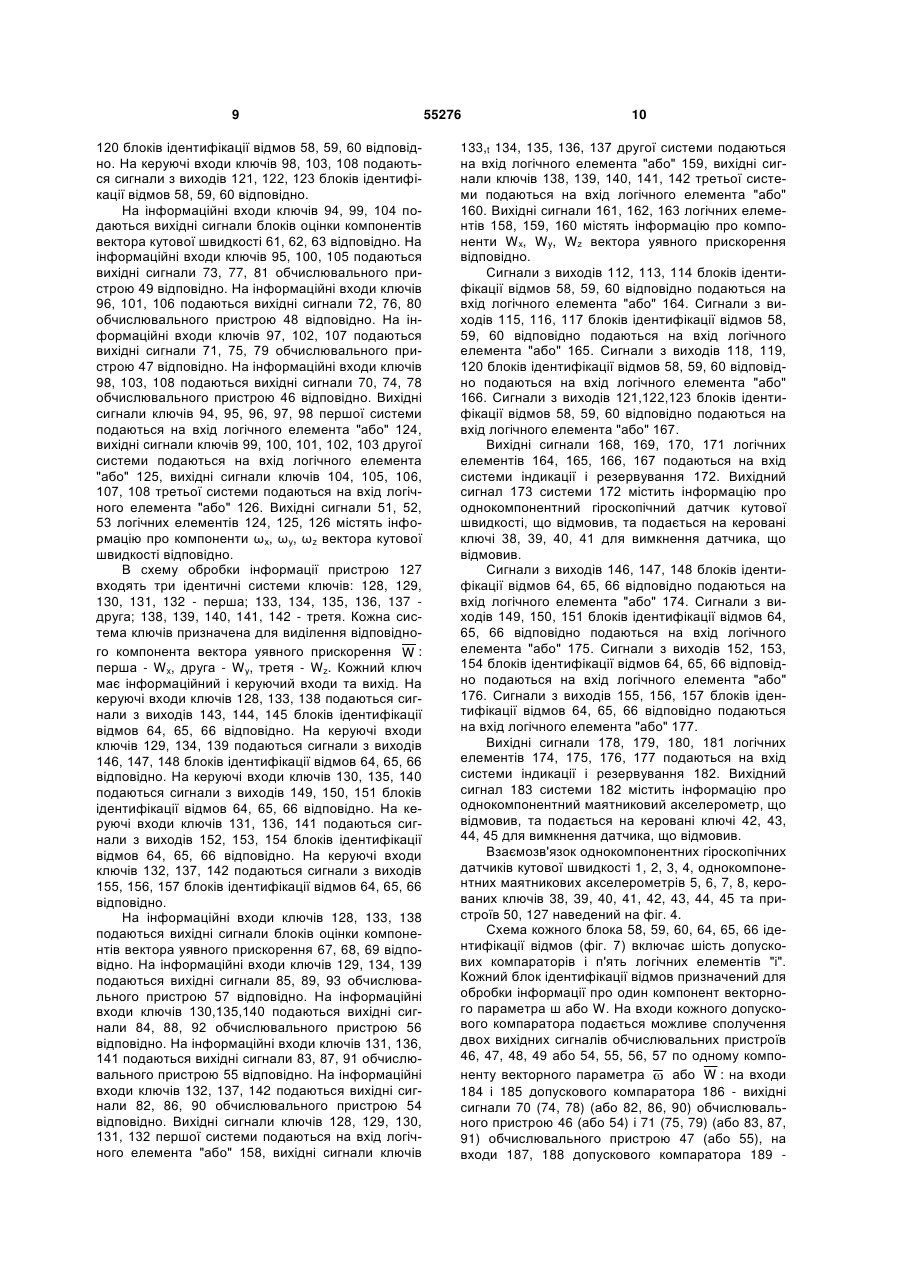
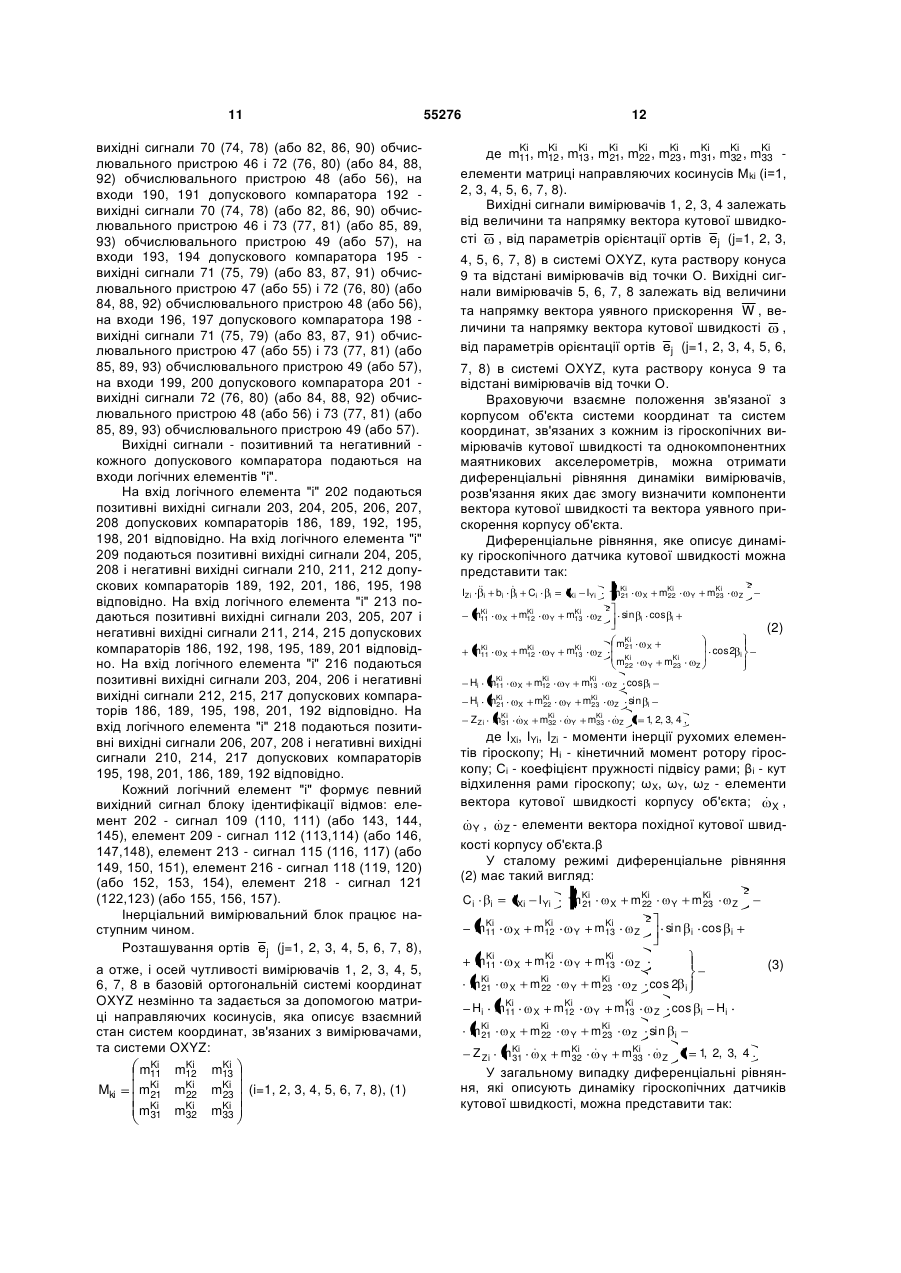
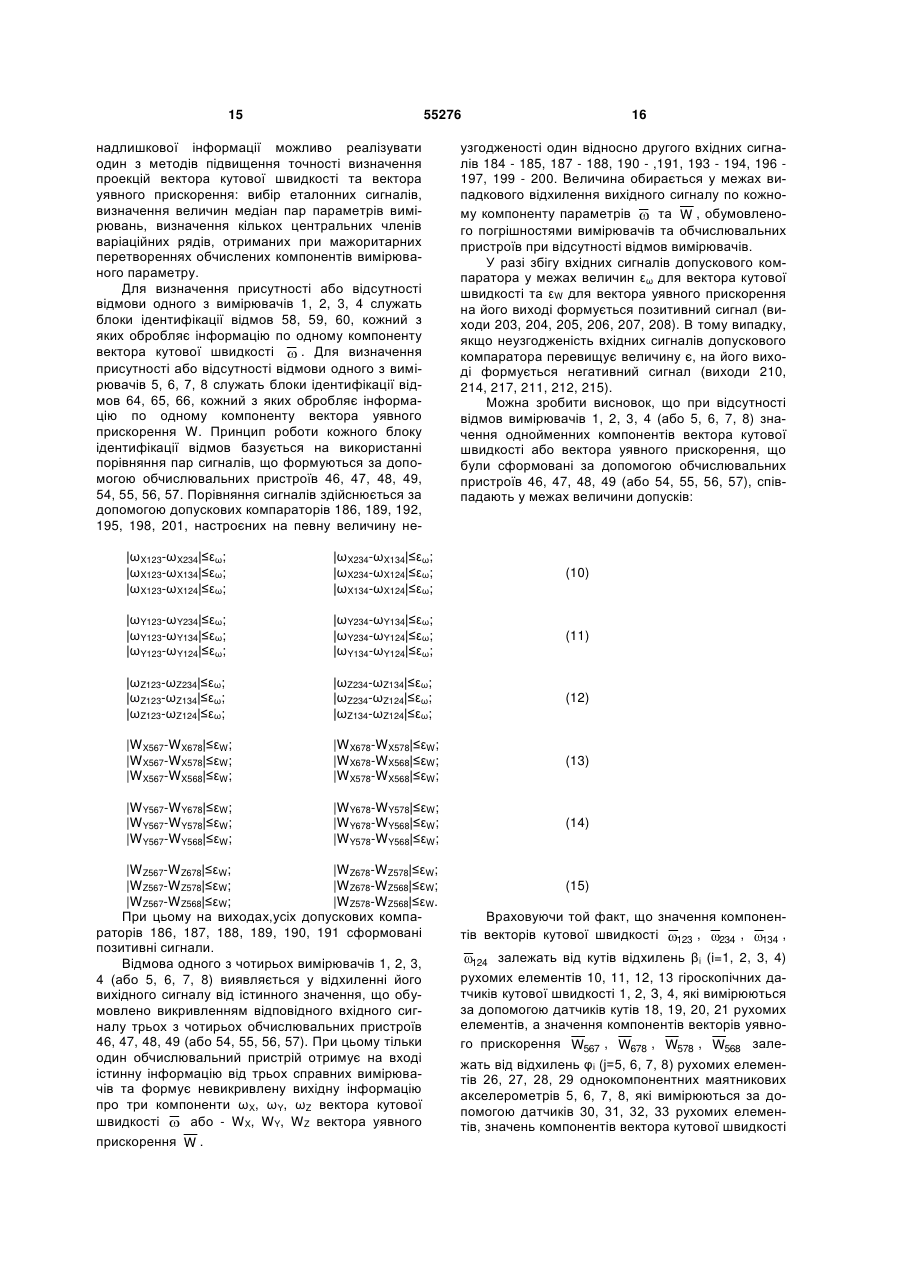
1. Інерціальний вимірювальний блок, що містить як вимірювачі три однокомпонентних гіроскопічних датчики кутової швидкості, три однокомпонентних маятникових акселерометри, який відрізняється тим, що в нього введені додаткові однокомпонентний гіроскопічний датчик кутової швидкості і однокомпонентний маятниковий акселерометр та система обробки інформації, а осі чутливості всіх вимірювачів розташовані по твірних конуса та мають спільний початок на осі конуса. 2. Інерціальний вимірювальний блок за п. 1, який відрізняється тим, що система обробки інформації включає вісім обчислювальних пристроїв, що використовують інформацію вимірювачів, вхід першого з обчислювальних пристроїв з'єднаний з виходами першого, другого і третього гіроскопічних датчиків кутової швидкості через перший, другий та третій керовані ключі управління вимірювачами відповідно, вхід другого - з виходами другого, третього і четвертого гіроскопічних датчиків кутової швидкості через другий, третій та четвертий керовані ключі управління вимірювачами, вхід третього - з виходами першого, третього і четвертого гіроскопічних датчиків кутової швидкості через перший, третій та четвертий керовані ключі управління вимірювачами, вхід четвертого - з виходами першого, другого і четвертого гіроскопічних датчиків кутової швидкості через перший, другий та четвертий керовані ключі управління вимірювачами, вхід п'ятого - з виходами першого, другого і третього однокомпонентних маятникових акселерометрів через п'ятий, шостий та сьомий керовані ключі управління вимірювачами, вхід шостого - з виходами другого, третього і четвертого однокомпонентних маятникових акселерометрів через шостий, сьомий та восьмий керовані ключі управління вимірювачами, вхід сьомого - з виходами 2 (19) 1 3 55276 4 дами першої, другої, третьої, четвертої, п'ятої та шостої систем ключів, а входи восьми інших логічних елементів Або з'єднані з виходами блоків ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, а виходи цих восьми логічних елементів Або з'єднані з входами двох блоків резервування вимірювачів, виходи блоків резервування з'єднані з керуючими входами ключів управління вимірювачами, кожний з восьми керованих ключів управління вимірювачами має інформаційний вхід, який з'єднаний з одним із восьми вимірювачів, та керуючий вхід, вихід кожного з керованих ключів управління вимірювачами з'єднаний з відповідними входами обчислювальних пристроїв. 3. Інерціальний вимірювальний блок за п. 2, який відрізняється тим, що кожний блок ідентифікації відмов вимірювачів містить шість допускових компараторів, входи кожного з яких з'єднані з однією із шести можливих пар сполучень вихідних сигналів одного компонента вектора кутової швидкості або вектора уявного прискорення, які формуються за допомогою чотирьох обчислювальних пристроїв: першого допускового компаратора - першого та другого, другого - першого та третього, третього першого та четвертого, четвертого - другого та третього, п'ятого - другого та четвертого, шостого третього та четвертого, а вихідні сигнали компараторів - один позитивний, що відповідає збігу вхідних сигналів у межах прийнятого допуску, другий негативний, який відповідає їх різниці у межах встановленого допуску - з'єднані з входами п'яти логічних елементів І, кожний з яких відповідає певному сполученню позитивних та негативних вхідних сигналів і одному з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, по відповідному компоненту вектора кутової швидкості або вектора уявного прискорення, причому виходи логічних елементів І з'єднані з керуючими входами відповідної системи ключів та входами логічних елементів Або. Корисна модель відноситься до галузі вимірювальної техніки та може бути використана для визначення інерціальних параметрів (компонентів векторів кутової швидкості або уявного прискорення) рухомих об'єктів у просторі в системах стабілізації, навігації, наведення, зокрема - в безкарданних інерціальних (безплатформених) системах навігації (БІСН). Відомий функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одностепеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса [патент України на корисну модель № 7058 М. кл7. G01C 21/00, Функціонально-надлишковий інерціальний вимірювальний блок, Бюл. № 6, 2005p.]. Недоліком цього вимірювача є неможливість визначення повної інформації про інерціальні та навігаційні параметри рухомого об'єкта. Відомий найбільш близький та вибраний в якості прототипу інерціальний вимірювальний блок [патент України на корисну модель № 37386 М. кл7. G01P 9/00, Інерціальний вимірювальний блок, Бюл. № 22, 2008 p.], який містить три однокомпонентних гіроскопічних датчика кутової швидкості, три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів датчиків взаємно ортогональні та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів однокомпонентних маятникових акселерометрів паралельні відповідним осям підвісу рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості, виходи всіх шести вимірювачів кінематичних параметрів з'єднані з обчислювальним пристроєм. Недоліком цього вимірювального блоку є низька його надійність, яка обумовлена неможливістю визначення наявності та урахування в процесі обробки інформації відмов інерціальних вимірювачів. Задачею корисної моделі є підвищення надійності визначення інерціальної та навігаційної інформації шляхом використання функціональної надлишковості. Поставлена задача досягається тим, що в інерціальний вимірювальний блок, що містить в якості вимірювачів три однокомпонентних гіроскопічних датчика кутової швидкості, три однокомпонентних маятникових акселерометри, введені додаткові однокомпонентний гіроскопічний датчик кутової швидкості і однокомпонентний маятниковий акселерометр та система обробки інформації, а осі чутливості всіх вимірювачів розташовані по твірних конуса та мають спільний початок на осі конуса. Поставлена задача досягається також тим, що система обробки інформації включає вісім обчислювальних пристроїв, що використовують інформацію вимірювачів, вхід першого з обчислювальних пристроїв з'єднаний з виходами першого, другого і третього гіроскопічних датчиків кутової швидкості через перший, другий та третій керовані ключі управління вимірювачами відповідно, вхід другого - з виходами другого, третього і четвертого гіроскопічних датчиків кутової швидкості через другий, третій та четвертий керовані ключі управління вимірювачами, вхід третього - з виходами першого, третього і четвертого гіроскопічних датчиків кутової швидкості через перший, третій та четвертий керовані ключі управління вимірювачами, вхід четвертого - з виходами першого, другого і четвертого гіроскопічних датчиків кутової швидкості через перший, другий та четвертий керовані ключі управління вимірювачами, вхід п'ятого - з виходами першого, другого і третього однокомпо 5 нентних маятникових акселерометрів через п'ятий, шостий та сьомий керовані ключі управління вимірювачами, вхід шостого - з виходами другого, третього і четвертого однокомпонентних маятникових акселерометрів через шостий, сьомий та восьмий керовані ключі управління вимірювачами, вхід сьомого - з виходами першого, третього і четвертого однокомпонентних маятникових акселерометрів через п'ятий, сьомий та восьмий керовані ключі управління вимірювачами, вхід восьмого - з виходами першого, другого і четвертого однокомпонентних маятникових акселерометрів через п'ятий, шостий та восьмий керовані ключі управління вимірювачами, три блоки ідентифікації відмов гіроскопічних датчиків кутової швидкості по кожному компоненту вектора кутової швидкості відповідно, входи першого, другого і третього з яких з'єднані з виходами першого, другого, третього та четвертого обчислювальних пристроїв, три блоки ідентифікації відмов однокомпонентних маятникових акселерометрів по кожному компоненту вектора уявного прискорення відповідно, входи першого, другого і третього з яких з'єднані з виходами п'ятого, шостого, сьомого та восьмого обчислювальних пристроїв, три блоки оцінки компонентів вектора кутової швидкості при всіх справних гіроскопічних датчиках кутової швидкості, входи першого, другого та третього з яких з'єднані з виходами першого, другого і третього обчислювальних пристроїв, три блоки оцінки компонентів вектора уявного прискорення при всіх справних однокомпонентних маятникових акселерометрах, входи першого, другого та третього з яких з'єднані з виходами четвертого, п'ятого і шостого обчислювальних пристроїв, шість ідентичних систем ключів, що забезпечують видачу на вихід інерціального вимірювального блока трьох компонентів вектора кутової швидкості та трьох компонентів вектора уявного прискорення для будь-якого з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, причому кожна система містить у своєму складі п'ять ключів, керуючий вхід кожного з яких з'єднаний з відповідним виходом кожного блока ідентифікації відмов вимірювачів, а інформаційний вхід першого ключа кожної системи з'єднаний з виходом відповідного блока оцінки компонентів вектора, що вимірюється, інформаційні входи другого, третього, четвертого та п'ятого ключів кожної системи з'єднані з виходами обчислювальних пристроїв, чотирнадцять логічних елементів «або», які безпосередньо формують три компоненти вектора кутової швидкості та три компоненти вектора уявного прискорення та інформацію про вимірювач, що відмовив, причому входи шести логічних елементів «або» з'єднані з виходами першої, другої, третьої, четвертої, п'ятої та шостої систем ключів, а входи восьми інших логічних елементів «або» з'єднані з виходами блоків ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, а виходи цих восьми логічних елементів «або» з'єднані з входами двох блоків резервування вимірювачів, виходи блоків резервування з'єднанні з керуючими входами ключів управління вимірювачами, кожний з восьми керованих ключів управління вимірювачами має інформаційний вхід, який 55276 6 з'єднаний з одним із восьми вимірювачів, та керуючий вхід, вихід кожного з керованих ключів управління вимірювачами з'єднаний з відповідними входами обчислювальних пристроїв. Поставлена задача досягається також тим, що кожний блок ідентифікації відмов вимірювачів містить шість допускових компараторів, входи кожного з яких з'єднані з однією із шести можливих пар сполучень вихідних сигналів одного компонента вектора кутової швидкості або вектора уявного прискорення, які формуються за допомогою чотирьох обчислювальних пристроїв: першого допускового компаратора - першого та другого, другого першого та третього, третього - першого та четвертого, четвертого - другого та третього, п'ятого другого та четвертого, шостого - третього та четвертого, а вихідні сигнали компараторів - один позитивний, що відповідає збігу вхідних сигналів у межах прийнятого допуску, другий негативний, який відповідає їх різниці у межах встановленого допуску - з'єднані з входами п'яти логічних елементів «і», кожний з яких відповідає певному сполученню позитивних та негативних вхідних сигналів і одному з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, по відповідному компоненту вектора кутової швидкості або вектора уявного прискорення, причому виходи логічних елементів «і» з'єднані з керуючими входами відповідної системи ключів та входами логічних елементів «або». Суть корисної моделі пояснюється кресленнями, де на фіг. 1 наведена кінематична схема інерціального вимірювального блоку, на фіг. 2 наведена кінематична схема однокомпонентного гіроскопічного датчика кутової швидкості, на фіг. 3 наведена кінематична схема однокомпонентного маятникового акселерометра, на фіг. 4 наведена структурно-функціональна схема інерціального вимірювального блоку, на фіг. 5 і 6 наведена структурно-функціональна схема системи обробки інформації інерціального вимірювального блоку, на фіг. 7 наведена структурно-функціональна схема блоку ідентифікації відмов вимірювачів. Інерціальний вимірювальний блок (фіг. 1) містить чотири однокомпонентних гіроскопічних датчика кутової швидкості 1, 2, 3, 4 та чотири однокомпонентних маятникових акселерометри 5, 6, 7, 8. Кожна з осей чутливості, зв'язаних з кожним із однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4 та однокомпонентних маятникових акселерометрів 5, 6, 7, 8, розміщена по твірній конуса 9. Всі осі чутливості мають спільний початок на осі конуса (точка О). Орт e визначає розташування осі симетрії конуса, орти ej (j=1, 2, 3, 4, 5, 6, 7, 8) визначають напрям осей чутливості вимірювачів. Кожний з однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4 (фіг. 2) містить рухомі елементи - це рами 10, 11, 12, 13, які відхиляються на певні кути. У кожній рамі 10, 11, 12, 13, розташовані ротори 14, 15, 16, 17, відповідно. Також до складу однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4 входять датчики 18, 19, 20, 21 кутів відхилення рухомих елемен 7 тів і датчики моментів 22, 23, 24, 25. Кожен з однокомпонентних маятникових акселерометрів 5, 6, 7, 8 (фіг. 3) містить рухомі елементи - це інерційні маси 26, 27, 28, 29, які відхиляються на певні кути. Також до складу однокомпонентних маятникових акселерометрів 5, 6, 7, 8 входять датчики 30, 31, 32, 33 кутів відхилення рухомих елементів і датчики моментів 34, 35, 36, 37. За допомогою датчиків 18,19, 20, 21 визначаються кути відхилення рухомих елементів 10, 11, 12, 13 однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4, за допомогою датчиків 30, 31, 32, 33 визначаються кути відхилення рухомих елементів 26, 27, 28, 29 однокомпонентних маятникових акселерометрів 5, 6, 7, 8. Вихідні сигнали (фіг. 4) з однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4 та однокомпонентних маятникових акселерометрів 5, 6, 7, 8 подаються через керовані ключі 38, 39, 40, 41, 42, 43, 44, 45 відповідно до кожного з датчиків на обчислювальні пристрої. Система обробки інформації про кутову швидкість рухомого об'єкту (фіг. 5) включає чотири обчислювальних пристрої 46, 47, 48, 49, за допомогою яких на основі показань однокомпонентних датчиків кутової швидкості 1, 2, 3, 4 згідно зі спеціальними алгоритмами здійснюється визначення трьох компонентів вектора кутової швидкості . Кількість обчислювальних пристроїв зумовлена числом можливих комбінацій вихідних сигналів вимірювачів по три з чотирьох. На вхід обчислювального пристрою 46 подаються вихідні сигнали вимірювачів 1, 2, 3; на вхід обчислювального пристрою 47 - вихідні сигнали вимірювачів 2, 3, 4; на вхід обчислювального пристрою 48 - вихідні сигнали вимірювачів 1, 3, 4; на вхід обчислювального пристрою 49 - вихідні сигнали вимірювачів 1, 2, 4. За допомогою кожного з обчислювальних пристроїв 46, 47, 48, 49 формується інформація про три компоненти вектора кутової швидкості . Результатом роботи пристрою 50 є три проекції 51, 52, 53 вектора кутової швидкості на осі зв'язаної з об'єктом системи координат OXYZ. Система обробки інформації про уявне прискорення рухомого об'єкту (фіг. 6) включає чотири обчислювальних пристрої 54, 55, 56, 57, за допомогою яких на основі показань однокомпонентних маятникових акселерометрів 5, 6, 7, 8 та інформації про три компоненти 51, 52, 53 вектора кутової швидкості згідно зі спеціальними алгоритмами здійснюється визначення компонентів вектора уявного прискорення W . Кількість обчислювальних пристроїв зумовлена числом можливих комбінацій вихідних сигналів вимірювачів по три з чотирьох. На вхід обчислювального пристрою 54 подаються вихідні сигнали вимірювачів 5, 6, 7; на вхід обчислювального пристрою 55 - вихідні сигнали вимірювачів 6, 7, 8; на вхід обчислювального пристрою 56 - вихідні сигнали вимірювачів 5, 7, 8; на вхід обчислювального пристрою 57 - вихідні сигнали вимірювачів 5, 6, 8. Також на входи всіх обчислювальних пристроїв 54, 55, 56, 57 подається інформація про проекції вектора кутової швидкості 51, 52, 53. За допомогою кожного з обчислю 55276 8 вальних пристроїв 54, 55, 56, 57 формується інформація про три компоненти вектора уявного прискорення W . Виходи обчислювальних пристроїв 46, 47, 48, 49 з'єднані з входами блоків 58, 59, 60 ідентифікації відмов однокомпонентних датчиків кутової швидкості та з входами блоків 61, 62, 63 оцінки компонентів вектора кутової швидкості. Виходи обчислювальних пристроїв 54, 55, 56, 57 з'єднані з входами блоків 64, 65, 66 ідентифікації відмов та на входи блоків 67, 68, 69 оцінки компонентів вектора уявного прискорення. На вхід блоків ідентифікації відмов 58 та оцінки першого компонента вектора кутової швидкості 61 подаються вихідні сигнали 70, 71, 72, 73 обчислювальних пристроїв т 46, 47, 48, 49 відповідно. На вхід блоків ідентифікації відмов 59 та оцінки другого компонента вектора кутової швидкості 62 подаються вихідні сигнали 74, 75, 76, 77 обчислювальних пристроїв 46, 47, 48, 49 відповідно. На вхід блоків ідентифікації відмов 60 та оцінки третього компонента вектора кутової швидкості 63 подаються вихідні сигнали 78, 79, 80, 81 обчислювальних пристроїв 46, 47, 48, 49 відповідно. Вихідні сигнали обчислювальних пристроїв 46, 47, 48, 49 містять інформацію про компоненти вектора кутової швидкості: сигнали 70, 71, 72, 73 - про перший компонент (ωх), сигнали 74, 75, 76, 77 про другий компонент (ωу), сигнали 78, 79, 80, 81 про третій компонент (ωz). На вхід блоків ідентифікації відмов 64 та оцінки першого компонента вектора уявного прискорення 67 подаються вихідні сигнали 82, 83, 84, 85 обчислювальних пристроїв 54, 55, 56, 57 відповідно. На вхід блоків ідентифікації відмов 65 та оцінки другого компонента вектора уявного прискорення 68 подаються вихідні сигнали 86, 87, 88, 89 обчислювальних пристроїв 54, 55, 56, 57 відповідно. На вхід блоків ідентифікації відмов 66 та оцінки третього компонента вектора уявного прискорення 69 подаються вихідні сигнали 90, 91, 92, 93 обчислювальних пристроїв 54, 55, 56, 57 відповідно. Вихідні сигнали обчислювальних пристроїв 54, 55, 56, 57 містять інформацію про компоненти вектора уявного прискорення: сигнали 82, 83, 84, 85 про перший компонент (Wx), сигнали 86, 87, 88, 89 - про другий компонент (Wy), сигнали 90, 91, 92, 93 - про третій компонент (Wz). В схему обробки інформації пристрою 50 входять три ідентичні системи ключів: 94, 95, 96, 97, 98 - перша; 99, 100, 101, 102, 103 - друга; 104, 105, 106, 107, 108 - третя. Кожна система ключів призначена для виділення відповідного компонента вектора кутової швидкості : перша - ωх, друга ωу, третя - ωz. Кожний ключ має інформаційний і керуючий входи та вихід. На керуючі входи ключів 94, 99, 104 подаються сигнали з виходів 109, ПО, 111 блоків ідентифікації відмов 58, 59, 60 відповідно. На керуючі входи ключів 95, 100, 105 подаються сигнали з виходів 112, 113, 114 блоків ідентифікації відмов 58, 59, 60 відповідно. На керуючі входи ключів 96, 101, 106 подаються сигнали з виходів 115, 116, 117 блоків ідентифікації відмов 58, 59, 60 відповідно. На керуючі входи ключів 97, 102, 107 подаються сигнали з виходів 118, 119, 9 120 блоків ідентифікації відмов 58, 59, 60 відповідно. На керуючі входи ключів 98, 103, 108 подаються сигнали з виходів 121, 122, 123 блоків ідентифікації відмов 58, 59, 60 відповідно. На інформаційні входи ключів 94, 99, 104 подаються вихідні сигнали блоків оцінки компонентів вектора кутової швидкості 61, 62, 63 відповідно. На інформаційні входи ключів 95, 100, 105 подаються вихідні сигнали 73, 77, 81 обчислювального пристрою 49 відповідно. На інформаційні входи ключів 96, 101, 106 подаються вихідні сигнали 72, 76, 80 обчислювального пристрою 48 відповідно. На інформаційні входи ключів 97, 102, 107 подаються вихідні сигнали 71, 75, 79 обчислювального пристрою 47 відповідно. На інформаційні входи ключів 98, 103, 108 подаються вихідні сигнали 70, 74, 78 обчислювального пристрою 46 відповідно. Вихідні сигнали ключів 94, 95, 96, 97, 98 першої системи подаються на вхід логічного елемента "або" 124, вихідні сигнали ключів 99, 100, 101, 102, 103 другої системи подаються на вхід логічного елемента "або" 125, вихідні сигнали ключів 104, 105, 106, 107, 108 третьої системи подаються на вхід логічного елемента "або" 126. Вихідні сигнали 51, 52, 53 логічних елементів 124, 125, 126 містять інформацію про компоненти ωх, ωу, ωz вектора кутової швидкості відповідно. В схему обробки інформації пристрою 127 входять три ідентичні системи ключів: 128, 129, 130, 131, 132 - перша; 133, 134, 135, 136, 137 друга; 138, 139, 140, 141, 142 - третя. Кожна система ключів призначена для виділення відповідного компонента вектора уявного прискорення W : перша - Wx, друга - Wy, третя - Wz. Кожний ключ має інформаційний і керуючий входи та вихід. На керуючі входи ключів 128, 133, 138 подаються сигнали з виходів 143, 144, 145 блоків ідентифікації відмов 64, 65, 66 відповідно. На керуючі входи ключів 129, 134, 139 подаються сигнали з виходів 146, 147, 148 блоків ідентифікації відмов 64, 65, 66 відповідно. На керуючі входи ключів 130, 135, 140 подаються сигнали з виходів 149, 150, 151 блоків ідентифікації відмов 64, 65, 66 відповідно. На керуючі входи ключів 131, 136, 141 подаються сигнали з виходів 152, 153, 154 блоків ідентифікації відмов 64, 65, 66 відповідно. На керуючі входи ключів 132, 137, 142 подаються сигнали з виходів 155, 156, 157 блоків ідентифікації відмов 64, 65, 66 відповідно. На інформаційні входи ключів 128, 133, 138 подаються вихідні сигнали блоків оцінки компонентів вектора уявного прискорення 67, 68, 69 відповідно. На інформаційні входи ключів 129, 134, 139 подаються вихідні сигнали 85, 89, 93 обчислювального пристрою 57 відповідно. На інформаційні входи ключів 130,135,140 подаються вихідні сигнали 84, 88, 92 обчислювального пристрою 56 відповідно. На інформаційні входи ключів 131, 136, 141 подаються вихідні сигнали 83, 87, 91 обчислювального пристрою 55 відповідно. На інформаційні входи ключів 132, 137, 142 подаються вихідні сигнали 82, 86, 90 обчислювального пристрою 54 відповідно. Вихідні сигнали ключів 128, 129, 130, 131, 132 першої системи подаються на вхід логічного елемента "або" 158, вихідні сигнали ключів 55276 10 133,t 134, 135, 136, 137 другої системи подаються на вхід логічного елемента "або" 159, вихідні сигнали ключів 138, 139, 140, 141, 142 третьої системи подаються на вхід логічного елемента "або" 160. Вихідні сигнали 161, 162, 163 логічних елементів 158, 159, 160 містять інформацію про компоненти Wx, Wy, Wz вектора уявного прискорення відповідно. Сигнали з виходів 112, 113, 114 блоків ідентифікації відмов 58, 59, 60 відповідно подаються на вхід логічного елемента "або" 164. Сигнали з виходів 115, 116, 117 блоків ідентифікації відмов 58, 59, 60 відповідно подаються на вхід логічного елемента "або" 165. Сигнали з виходів 118, 119, 120 блоків ідентифікації відмов 58, 59, 60 відповідно подаються на вхід логічного елемента "або" 166. Сигнали з виходів 121,122,123 блоків ідентифікації відмов 58, 59, 60 відповідно подаються навхід логічного елемента "або" 167. Вихідні сигнали 168, 169, 170, 171 логічних елементів 164, 165, 166, 167 подаються на вхід системи індикації і резервування 172. Вихідний сигнал 173 системи 172 містить інформацію про однокомпонентний гіроскопічний датчик кутової швидкості, що відмовив, та подається на керовані ключі 38, 39, 40, 41 для вимкнення датчика, що відмовив. Сигнали з виходів 146, 147, 148 блоків ідентифікації відмов 64, 65, 66 відповідно подаються на вхід логічного елемента "або" 174. Сигнали з виходів 149, 150, 151 блоків ідентифікації відмов 64, 65, 66 відповідно подаються на вхід логічного елемента "або" 175. Сигнали з виходів 152, 153, 154 блоків ідентифікації відмов 64, 65, 66 відповідно подаються на вхід логічного елемента "або" 176. Сигнали з виходів 155, 156, 157 блоків ідентифікації відмов 64, 65, 66 відповідно подаються на вхід логічного елемента "або" 177. Вихідні сигнали 178, 179, 180, 181 логічних елементів 174, 175, 176, 177 подаються на вхід системи індикації і резервування 182. Вихідний сигнал 183 системи 182 містить інформацію про однокомпонентний маятниковий акселерометр, що відмовив, та подається на керовані ключі 42, 43, 44, 45 для вимкнення датчика, що відмовив. Взаємозв'язок однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3, 4, однокомпонентних маятникових акселерометрів 5, 6, 7, 8, керованих ключів 38, 39, 40, 41, 42, 43, 44, 45 та пристроїв 50, 127 наведений на фіг. 4. Схема кожного блока 58, 59, 60, 64, 65, 66 ідентифікації відмов (фіг. 7) включає шість допускових компараторів і п'ять логічних елементів "і". Кожний блок ідентифікації відмов призначений для обробки інформації про один компонент векторного параметра ш або W. На входи кожного допускового компаратора подається можливе сполучення двох вихідних сигналів обчислювальних пристроїв 46, 47, 48, 49 або 54, 55, 56, 57 по одному компоненту векторного параметра або W : на входи 184 і 185 допускового компаратора 186 - вихідні сигнали 70 (74, 78) (або 82, 86, 90) обчислювального пристрою 46 (або 54) і 71 (75, 79) (або 83, 87, 91) обчислювального пристрою 47 (або 55), на входи 187, 188 допускового компаратора 189 11 55276 вихідні сигнали 70 (74, 78) (або 82, 86, 90) обчислювального пристрою 46 і 72 (76, 80) (або 84, 88, 92) обчислювального пристрою 48 (або 56), на входи 190, 191 допускового компаратора 192 вихідні сигнали 70 (74, 78) (або 82, 86, 90) обчислювального пристрою 46 і 73 (77, 81) (або 85, 89, 93) обчислювального пристрою 49 (або 57), на входи 193, 194 допускового компаратора 195 вихідні сигнали 71 (75, 79) (або 83, 87, 91) обчислювального пристрою 47 (або 55) і 72 (76, 80) (або 84, 88, 92) обчислювального пристрою 48 (або 56), на входи 196, 197 допускового компаратора 198 вихідні сигнали 71 (75, 79) (або 83, 87, 91) обчислювального пристрою 47 (або 55) і 73 (77, 81) (або 85, 89, 93) обчислювального пристрою 49 (або 57), на входи 199, 200 допускового компаратора 201 вихідні сигнали 72 (76, 80) (або 84, 88, 92) обчислювального пристрою 48 (або 56) і 73 (77, 81) (або 85, 89, 93) обчислювального пристрою 49 (або 57). Вихідні сигнали - позитивний та негативний кожного допускового компаратора подаються на входи логічних елементів "і". На вхід логічного елемента "і" 202 подаються позитивні вихідні сигнали 203, 204, 205, 206, 207, 208 допускових компараторів 186, 189, 192, 195, 198, 201 відповідно. На вхід логічного елемента "і" 209 подаються позитивні вихідні сигнали 204, 205, 208 і негативні вихідні сигнали 210, 211, 212 допускових компараторів 189, 192, 201, 186, 195, 198 відповідно. На вхід логічного елемента "і" 213 подаються позитивні вихідні сигнали 203, 205, 207 і негативні вихідні сигнали 211, 214, 215 допускових компараторів 186, 192, 198, 195, 189, 201 відповідно. На вхід логічного елемента "і" 216 подаються позитивні вихідні сигнали 203, 204, 206 і негативні вихідні сигнали 212, 215, 217 допускових компараторів 186, 189, 195, 198, 201, 192 відповідно. На вхід логічного елемента "і" 218 подаються позитивні вихідні сигнали 206, 207, 208 і негативні вихідні сигнали 210, 214, 217 допускових компараторів 195, 198, 201, 186, 189, 192 відповідно. Кожний логічний елемент "і" формує певний вихідний сигнал блоку ідентифікації відмов: елемент 202 - сигнал 109 (110, 111) (або 143, 144, 145), елемент 209 - сигнал 112 (113,114) (або 146, 147,148), елемент 213 - сигнал 115 (116, 117) (або 149, 150, 151), елемент 216 - сигнал 118 (119, 120) (або 152, 153, 154), елемент 218 - сигнал 121 (122,123) (або 155, 156, 157). Інерціальний вимірювальний блок працює наступним чином. Розташування ортів ej (j=1, 2, 3, 4, 5, 6, 7, 8), а отже, і осей чутливості вимірювачів 1, 2, 3, 4, 5, 6, 7, 8 в базовій ортогональній системі координат OXYZ незмінно та задається за допомогою матриці направляючих косинусів, яка описує взаємний стан систем координат, зв'язаних з вимірювачами, та системи OXYZ: Ki Ki m11 m12 Mki Ki m13 mKi mKi 21 22 mKi mKi 31 32 mKi 23 mKi 33 (i=1, 2, 3, 4, 5, 6, 7, 8), (1) 12 Ki Ki Ki де m11, m12 , m13 , mKi , mKi , mKi , mKi , mKi , mKi 21 22 23 31 32 33 елементи матриці направляючих косинусів Мkі (і=1, 2, 3, 4, 5, 6, 7, 8). Вихідні сигнали вимірювачів 1, 2,3, 4 залежать від величини та напрямку вектора кутової швидкості , від параметрів орієнтації ортів ej (j=1, 2, 3, 4, 5, 6, 7, 8) в системі OXYZ, кута раствору конуса 9 та відстані вимірювачів від точки О. Вихідні сигнали вимірювачів 5, 6, 7, 8 залежать від величини та напрямку вектора уявного прискорення W , величини та напрямку вектора кутової швидкості , від параметрів орієнтації ортів ej (j=1, 2, 3, 4, 5, 6, 7, 8) в системі OXYZ, кута раствору конуса 9 та відстані вимірювачів від точки О. Враховуючи взаємне положення зв'язаної з корпусом об'єкта системи координат та систем координат, зв'язаних з кожним із гіроскопічних вимірювачів кутової швидкості та однокомпонентних маятникових акселерометрів, можна отримати диференціальні рівняння динаміки вимірювачів, розв'язання яких дає змогу визначити компоненти вектора кутової швидкості та вектора уявного прискорення корпусу об'єкта. Диференціальне рівняння, яке описує динаміку гіроскопічного датчика кутової швидкості можна представити так: IZi i bi i Ki m11 Ci X Ki m13 Y Ki m12 IXi Y Ki m12 X Ki m11 i Ki m13 Ki Hi m11 X Hi mKi 21 Z Zi mKi 31 Ki m12 Ki X m22 X mKi 32 mKi 21 IYi 2 sin Z mKi 22 X i cos mKi 21 Y Y Ki m13 Z cos (2) mKi 23 Z sin cos 2 mKi 23 i Z i Y Z i X mKi 22 Z 2 mKi 23 Y i Y mKi Z i 33 1, 2, 3, 4 , де IXi, IYi, IZi - моменти інерції рухомих елементів гіроскопу; Ні - кінетичний момент ротору гіроскопу; Сі - коефіцієнт пружності підвісу рами; βі - кут відхилення рами гіроскопу; ωX, ωY, ωZ - елементи вектора кутової швидкості корпусу об'єкта; X , Y , Z - елементи вектора похідної кутової швидкості корпусу об'єкта.β У сталому режимі диференціальне рівняння (2) має такий вигляд: Ci mKi 21 mKi 22 I Xi I Yi Ki m11 X Ki m12 Y Ki m13 Ki m11 X Ki m12 Y Ki m13 Z 2 mKi 23 Z mKi 23 i mKi 21 X Ki Hi m11 mKi 21 X mKi 22 X mKi 22 Z Zi mKi X 31 Y Ki m12 Y X Y mKi 23 mKi Y 32 Y 2 sin Z Ki m13 Z i Z cos i (3) cos 2 Z sin mKi Z 33 i cos i Hi i i 1, 2, 3, 4 . У загальному випадку диференціальні рівняння, які описують динаміку гіроскопічних датчиків кутової швидкості, можна представити так: 13 55276 Ki Ki Ki Fi I Xi , I Yi , I Zi , Hi , C i , m11 , m12 , m13 , m Ki , m Ki , m Ki , m Ki , m Ki , m Ki , 21 22 23 31 32 33 KX , (4) i, KZ , KX , KY , KZ KY , 0, (i 1, 2, 3, 4) Розв'язуючи рівняння (4) відносно ωх, ωу, ωz, для кожної тріади гіроскопічних датчиків кутової швидкості, можна визначити елементи вектора кутової швидкості корпусу об'єкта . T (5) ; де ωх, ωу, ωz - компоненти вектора кутової швидкості системи OXYZ. Диференціальне рівняння, яке описує динаміку однокомпонентного маятникового акселерометру, можна представити так: X I ZZi i Y K yi i m i l i * cos K yi * Ki m11 Ki m12 X m Ki 21 X Ki m13 Ki m13 W Z m Ki W Z 23 I YYi m i l i sin (6) i I XXi * 2 Z Z m Ki 23 Y Ki m12 W Y Z sin 2 Ki m13 Y Y m Ki 22 m Ki 33 m Ki 23 Y Ki m12 X m Ki W Y 22 m Ki Y 32 m Ki 22 X Ki m11 Ki m11 W X i m Ki W X 21 i I ZZi m Ki X 31 m Ki 21 Z cos i i Z * i 1 2 sin 2 Z 5, 6, 7, 8 . i де IXXi, IYYi, IZZi - осьові моменти інерції рухомого елемента акселерометра; Kуі - коефіцієнт пружності підвісу рухомої частини; mі - величина інерційної маси; li - плече зміщення інерційної маси; φi - кут відхилення рухомого елементу маятникового акселерометру; WX, WY, WZ - елементи вектора уявного прискорення корпусу об'єкта. У сталому режимі диференціальне рівняння (6) має такий вигляд: K yi Ki m11 WX i mKi WX 21 mKi WY 22 IZZi mKi X 31 * mKi 21 Ki m11 X mKi 21 X X Y Ki m12 Y mKi 22 Y mKi Z 33 mKi 23 Y Ki m12 Ki m13 WZ mi li cos mKi WZ mi li sin 23 mKi Y 32 mKi 22 X Ki m11 Ki m12 WY IYYi i (7) i IXXi * 2 Z Ki m13 Ki m13 Z * mKi 23 Z 2 sin i cos i Z 1 2 sin 2 i 5, 6, 7, 8 . i У загальному випадку диференціальні рівняння, які описують динаміку однокомпонентних маятникових акселерометрів, мають такий вигляд: Ki Ki Ki Fi IXXi, IYYi , IZZi, K yi , mi, li, m11, m12 , m13 , mKi , mKi , 21 22 mKi , mKi , mKi , mKi , 23 31 32 33 0, (i i, WX , WY , WZ , X, Y, Z, X, Y , Z (8) 5, 6, 7, 8). Для розв'язання рівнянь (8) відносно WX, WY, WZ для кожної триади маятникових акселерометрів необхідна інформація про елементи вектора кутової швидкості (5), які визначаються шляхом розв'язання рівнянь (4) за допомогою обчислювальних пристроїв 54, 55, 56, 57. Тому стає можливим визначити елементи вектора уявного прискорення корпусу об'єкта. (9) W W X WY WZ T . В інерціальному вимірювальному блоці, що розглядається, використовуються триади вимірювачів (гіроскопічних датчиків кутової швидкості) для визначення проекцій вектора кутової швидкості на осі системи координат OXYZ (табл. 1) та 14 триади вимірювачів (однокомпонентних маятникових акселерометрів) для визначення проекцій вектора уявного прискорення W на осі системи координат OXYZ (табл. 2). Таблиця 1 Варіант 1 2 3 4 Номери вимірювачів 1, 2, 3 2, 3, 4 1, 3, 4 1, 2, 4 Таблиця 2 Варіант Номери вимірювачів 1 5, 6, 7 2 6, 7, 8 3 5, 7, 8 4 5, 6, 8 За допомогою функціонально надлишкового вимірювального блоку необхідно визначити проекції векторів 123 , 234 , 134 , 124 кутової швидкості та векторів W567 , W678 , W578 , W568 уявного прискорення на осі системи координат OXYZ шляхом розв'язання диференційних рівнянь (4) та алгебраїчних рівнянь (8). При визначенні проекцій векторів кутової швидкості та уявного прискорення на осі системи координат OXYZ результати співпадають у межах Прийнятого допуску εω для компонентів вектора кутової швидкості та εW для компонентів вектора уявного прискорення, які визначаються точнісними характеристиками вимірювачів та обчислювальних засобів. Для розв'язання рівнянь (4) і (8) та визначення проекцій векторів 123 , 234 , 134 , 124 кутової швидкості та векторів W567 , W678 , W578 , W568 уявного прискорення на осі системи координат OXYZ служать обчислювальні пристрої 46, 47, 48, 49, 54, 55, 56, 57, кожний з яких споживає інформацію, що формується відповідними трійками вимірювачів 1, 2, 3, 4, 5, 6, 7, 8. Вихідні сигнали обчислювальних пристроїв представляють собою проекції параметрів та W на осі системи координат OXYZ: 70, 74, 78 - ωX123, ωY123, ωZ123; 71, 75, 79 - ωX234, ωY234, ωZ234; 72, 76, 80 - ωX134, ωY134, ωZ134; 73, 77, 81 - ωX124, ωY124, ωZ124; 82, 86, 90 WX567, WY567, WZ567; 83, 87, 91 - WX678, WY678, WZ678; 84, 88, 92 - WX578, WY578, WZ578; 85, 89, 93 - WX568, WY568, WZ568. У тому випадку, коли відмови будьякого вимірювача немає, і результати обчислення відповідних компонентів вектора кутової швидкості та вектора уявного прискорення W співпадають у межах прийнятого допуску, вихідні сигнали обчислювальних пристроїв подаються на блоки оцінки компонентів вектора кутової швидкості і вектора уявного прискорення: сигнали 70, 71, 72, 73 - на блок 61; сигнали 74, 75, 76, 77 - на блок 62; сигнали 78, 79, 80, 81 - на блок 63; сигнали 82, 83, 84, 85 - на блок 67; сигнали 86, 87, 88, 89 - на блок 68; сигнали 90, 91, 92, 93 - на блок 69. За допомогою блоків 61, 62, 63, 67, 68, 69 шляхом обробки 15 55276 надлишкової інформації можливо реалізувати один з методів підвищення точності визначення проекцій вектора кутової швидкості та вектора уявного прискорення: вибір еталонних сигналів, визначення величин медіан пар параметрів вимірювань, визначення кількох центральних членів варіаційних рядів, отриманих при мажоритарних перетвореннях обчислених компонентів вимірюваного параметру. Для визначення присутності або відсутності відмови одного з вимірювачів 1, 2, 3, 4 служать блоки ідентифікації відмов 58, 59, 60, кожний з яких обробляє інформацію по одному компоненту вектора кутової швидкості . Для визначення присутності або відсутності відмови одного з вимірювачів 5, 6, 7, 8 служать блоки ідентифікації відмов 64, 65, 66, кожний з яких обробляє інформацію по одному компоненту вектора уявного прискорення W. Принцип роботи кожного блоку ідентифікації відмов базується на використанні порівняння пар сигналів, що формуються за допомогою обчислювальних пристроїв 46, 47, 48, 49, 54, 55, 56, 57. Порівняння сигналів здійснюється за допомогою допускових компараторів 186, 189, 192, 195, 198, 201, настроєних на певну величину не 16 узгодженості один відносно другого вхідних сигналів 184 - 185, 187 - 188, 190 - ,191, 193 - 194, 196 197, 199 - 200. Величина обирається у межах випадкового відхилення вихідного сигналу по кожному компоненту параметрів та W , обумовленого погрішностями вимірювачів та обчислювальних пристроїв при відсутності відмов вимірювачів. У разі збігу вхідних сигналів допускового компаратора у межах величин εω для вектора кутової швидкості та εW для вектора уявного прискорення на його виході формується позитивний сигнал (виходи 203, 204, 205, 206, 207, 208). В тому випадку, якщо неузгодженість вхідних сигналів допускового компаратора перевищує величину є, на його виході формується негативний сигнал (виходи 210, 214, 217, 211, 212, 215). Можна зробити висновок, що при відсутності відмов вимірювачів 1, 2, 3, 4 (або 5, 6, 7, 8) значення однойменних компонентів вектора кутової швидкості або вектора уявного прискорення, що були сформовані за допомогою обчислювальних пристроїв 46, 47, 48, 49 (або 54, 55, 56, 57), співпадають у межах величини допусків: |ωX123-ωX234|≤εω; |ωX123-ωX134|≤εω; |ωX123-ωX124|≤εω; |ωX234-ωX134|≤εω; |ωX234-ωX124|≤εω; |ωX134-ωX124|≤εω; (10) |ωY123-ωY234|≤εω; |ωY123-ωY134|≤εω; |ωY123-ωY124|≤εω; |ωY234-ωY134|≤εω; |ωY234-ωY124|≤εω; |ωY134-ωY124|≤εω; (11) |ωZ123-ωZ234|≤εω; |ωZ123-ωZ134|≤εω; |ωZ123-ωZ124|≤εω; |ωZ234-ωZ134|≤εω; |ωZ234-ωZ124|≤εω; |ωZ134-ωZ124|≤εω; (12) |WX567-WX678|≤εW; |WX567-WX578|≤εW; |WX567-WX568|≤εW; |WX678-WX578|≤εW; |WX678-WX568|≤εW; |WX578-WX568|≤εW; (13) |WY567-WY678|≤εW; |WY567-WY578|≤εW; |WY567-WY568|≤εW; |WY678-WY578|≤εW; |WY678-WY568|≤εW; |WY578-WY568|≤εW; (14) |WZ567-WZ678|≤εW; |WZ678-WZ578|≤εW; |WZ567-WZ578|≤εW; |WZ678-WZ568|≤εW; |WZ567-WZ568|≤εW; |WZ578-WZ568|≤εW. При цьому на виходах,усіх допускових компараторів 186, 187, 188, 189, 190, 191 сформовані позитивні сигнали. Відмова одного з чотирьох вимірювачів 1, 2, 3, 4 (або 5, 6, 7, 8) виявляється у відхиленні його вихідного сигналу від істинного значення, що обумовлено викривленням відповідного вхідного сигналу трьох з чотирьох обчислювальних пристроїв 46, 47, 48, 49 (або 54, 55, 56, 57). При цьому тільки один обчислювальний пристрій отримує на вході істинну інформацію від трьох справних вимірювачів та формує невикривлену вихідну інформацію про три компоненти ωX, ωY, ωZ вектора кутової швидкості або - WX, WY, WZ вектора уявного прискорення W . (15) Враховуючи той факт, що значення компонентів векторів кутової швидкості 123 , 234 , 134 , 124 залежать від кутів відхилень βi (і=1, 2, 3, 4) рухомих елементів 10, 11, 12, 13 гіроскопічних датчиків кутової швидкості 1, 2, З, 4, які вимірюються за допомогою датчиків кутів 18, 19, 20, 21 рухомих елементів, а значення компонентів векторів уявного прискорення W567 , W678 , W578 , W568 залежать від відхилень φi (j=5, 6, 7, 8) рухомих елементів 26, 27, 28, 29 однокомпонентних маятникових акселерометрів 5, 6, 7, 8, які вимірюються за допомогою датчиків 30, 31, 32, 33 рухомих елементів, значень компонентів вектора кутової швидкості 17 55276 та вектора похідної вектора кутової швидкості можна розглянути наступні ситуації. 123 F 123 1 1, 2, 3 234 F234 2, 3, 4 134 F 134 1 1. Відмова вимірювача 1: ; ; 1, 3, 4 18 (16) ; F 124 124 1 1, 2, 4 ; 2. Відмова вимірювача 2: F 123 123 1, 2 2, 3 ; 234 F234 2 134 F 134 1, 2, 3, 4 3, ; (17) ; 4 F 124 124 1, 2 2, 4 ; 3. Відмова вимірювача 3: F 123 123 1, 2, 3 3 ; 234 F234 2, 134 F 134 1, 3 ; 3, 4 3, 4 (18) ; F 124 124 1, 2, 4 ; 4. Відмова вимірювача 4: F 123 123 1, 2, 3 ; 234 F234 2, 3, 4 134 F 134 1, 3, 4 ; 4 4 (19) ; F 124 1, 2, 4 4 ; 5. Відмова вимірювача 5: W567 F567 5 5, 6, 7, 124 X, Y , Z ; X, Y , Z ; F678 6, 7, 8, W578 F578 5 5, 7, 8, X, Y , Z, X, Y , Z ; W568 F568 5 5, 6, 8, X, Y , Z, X, Y , Z ; 6. Відмова вимірювача 6: W567 F567 5, 6 6, 7, X, Y , Z, X, Y , Z ; X, Y , Z, X, Y , Z ; F678 6 W578 F578 5, 7, 8, Y , Z, Y , Z, W678 W678 X, X, 6, 7, 8, X, Y , Z, W568 F568 5, 6 6, 8, 7. Відмова вимірювача 7: W567 F567 5, 6, 7 7, X, Y , Z ; X, Y , Z, Y , Z, (21) X, Y , Z ; X, (20) X, Y , Z ; W678 F678 6, 7 7, 8, X, Y , Z, X, Y , Z ; W578 F578 5, 7 7, 8, X, Y , Z, X, Y , Z ; W568 F568 5, 6, 8, X, Y , Z, X, Y , Z ; 8. Відмова вимірювача 8: W567 F567 5, 6, 7, X, Y , Z, (22) X, Y , Z ; W678 F678 6, 7, 8 8, X, Y , Z, X, Y , Z ; W578 F578 5, 7, 8 8, X, Y , Z , X, Y , Z ; W568 F568 5, 6, 8 8, X, Y , Z, (23) X, Y , Z ; В співвідношеннях (16)-(19) Δβi (і=, 2, 3, 4) варіація вихідного сигналу датчика кута і-го гіроскопічного датчика кутової швидкості, що відмовив, яка викликає відхилення від істинного значення компонентів вектора кутової швидкості на величину, яка перевищує допуск εω. В співвідношеннях (20)-(23) Δφi (і=5, 6, 7, 8) варіація вихідного сигналу датчика кута і-го однокомпонентного маятникового акселерометру, що відмовив, яка викликає відхилення від істинного значення компонентів вектора уявного прискорення на величину, яка перевищує допуск εW. 19 55276 В співвідношеннях (16)-(23) F123, F234, F134, F124 - розв'язання диференційних рівнянь (4) для кожної з триад гіроскопічних датчиків кутової швидкості, F567, F678, F578, F568 - розв'язання диференційних |ωS123-ωS234|>εω; |ωS234-ωS134|>εω; |ωS123-ωS134|≤εω; |ωS234-ωS124|>εω; |ωS123-ωS124|≤εω; |ωS134-ωS124|≤εω; 2) при відмові вимірювача 2: |ωS123-ωS234|≤εω; |ωS234-ωS134|>εω; |ωS123-ωS134|>εω; |ωS234-ωS124|≤εω; |ωS123-ωS124|≤εω; |ωS134-ωS124|>εω; 3) при відмові вимірювача 3: |ωS123-ωS234|≤εω; |ωS234-ωS134|≤εω; |ωS123-ωS134|≤εω; |ωS234-ωS124|>εω; |ωS123-ωS124|>εω; |ωS134-ωS124|>εω; 4) при відмові вимірювача 4: |ωS123-ωS234|>εω; |ωS234-ωS134|≤εω; |ωS123-ωS134|>εω; |ωS234-ωS124|≤εω; |ωS123-ωS124|>εω; |ωS134-ωS124|≤εω; 5) при відмові вимірювача 5: |WX567-WX678|>εW; |WX678-WX578|>εW; |WX567-WX578|≤εW; |WX678-WX568|>εW; |WX567-WX568|≤εW; |WX578-WX568|≤εW; 6) при відмові вимірювача 6: |WX567-WX678|≤εW; |WX678-WX578|>εW; |WX567-WX578|>εW; |WX678-WX568|≤εW; |WX567-WX568|≤εW; |WX578-WX568|>εW; 7) при відмові вимірювача 7: |WX567-WX678|≤εW; |WX678-WX578|≤εW; |WX567-WX578|≤εW; |WX678-WX568|>εW; |WX567-WX568|>εW; |WX578-WX568|>εW; 8) при відмові вимірювача 8: |WX567-WX678|>εW; |WX678-WX578|≤εW; |WX567-WX578|>εW; |WX678-WX568|≤εW; |WX567-WX568|>εW; |WX578-WX568|≤εW. У співвідношеннях (24)-(31) індекс S послідовно приймає позначення осей X, Y, Z базової системи координат. Отже, в залежності від номеру вимірювача, що відмовив, на виходах допускових компараторів 20 рівнянь (8) для кожної з триад однокомпонентних маятникових акселерометрів. Із співвідношень (16)-(23) випливає, що: 1) при відмові вимірювача 1: (24) (25) (26) (27) (28) (29) (30) (31) формується певна сукупність позитивних та негативних сигналів. Проілюструємо це за допомогою таблиці 3. Таблиця 3 Вихідний сигнал допускового компаратора Номер вимірювача, що відмовив 1 2 3 4 усі датчики кутової швидкості справні 5 6 7 8 усі однокомпонентні маятникові акселерометри справні 186 210 (-) 203 (+) 203 (+) 210 (-) 203 (+) 210 (-) 203 (+) 203 (+) 210 (-) 189 192 195 198 201 204 (+) 214 (-) 204 (+) 214 (-) 204 (+) 204 (+) 214 (-) 204 (+) 214 (-) 205 (+) 205 (+) 217 (") 217 (") 205 (+) 205 (+) 205 (+) 217 (-) 217 (-) 211 (-) 211 (-) 206 (+) 206 (+) 206 (+) 211 (-) 211 (-) 206 (+) 206 (+) 212 (-) 207 (+) 212 (-) 207 (+) 207 (+) 212 (-) 207 (+) 212 (-) 207 (+) 208 (+) 215 (-) 215 (-) 208 (+) 208 (+) 208 (+) 215 (-) 215 (-) 208 (+) 203 (+) 204 (+) 205 (+) 206 (+) 207 (+) 208 (+) З цієї таблиці випливає, що кожному варіанту при відмові одного вимірювача відповідає певна комбінація позитивних та негативних вихідних сигналів допускових компараторів. Для виділення відповідного варіанта і формування вихідних сигналів 109, 112, 115, 118, 121, 110, 113, 116, 119, 122, 111, 114, 117, 120, 123, 143, 146, 149, 152, 155, 144, 147, 150, 153, 156, 145, 148, 151, 154, 157 блоків ідентифікації відмов 21 55276 використовуються логічні елементи "і" 202, 209, 213, 216, 218. На вхід кожного з них подається сукупність шести сигналів з допускових компараторів 186, 189, 192, 195, 198, 201 (див. таблицю 3). Наприклад, при всіх справних вимірювачах формується сукупність сигналів 203, 204, 205, 206, 207, 208; при першому несправному вимірювачі 22 210, 204, 205, 211, 212, 208 і так далі. Оскільки комбінації (сполучення) сигналів різні для всіх випадків, що розглядаються, в кожному з них один логічний елемент "і" формує вихідний сигнал блока ідентифікації відмов (див. таблицю 4). Чотири інші елементи "і" вихідних сигналів не формують. Таблиця 4 Номер вимірювача, що відмовив Логічний елемент «і», що формує вихідний сигнал Вихідний сигнал блока ідентифікації відмов 1 [5] 2 [6] 3 [7] 4 [8] Усі вимірювачі справні 209 213 216 218 202 112 (113, 114) [146, 147, 148] 115 (116, 117) [149, 150, 151] 118 (119, 120) [152, 153, 154] 121 (122, 123) [155, 156, 157] 109 (110, 111) [143, 144, 145] Шість блоків 58, 59, 60, 64, 65, 66 ідентифікації відмов по кожному компоненту вектора кутової швидкості та вектора уявного прискорення W відповідно працюють однаково. Для того, щоб подати істинний вихідний сигнал одного з чотирьох обчислювальних пристроїв 46, 47, 48, 49 на вихід вимірювача в цілому по кожному компоненту вектора кутової швидкості служать ідентичні системи керуючих ключів 94-98, 99103, 104-108 і логічні елементи "або" 124, 125, 126. Для того, щоб подати істинний вихідний сигнал одного з чотирьох обчислювальних пристроїв 54, 55, 56, 57 на вихід вимірювача в цілому по кожному компоненту вектора уявного прискорення W служать ідентичні системи керуючих ключів 128132, 133-137, 138-142 і логічні елементи "або" 158, 159, 160. Принцип дії кожного ключа 94-108, 128-142 ґрунтується на тому, що на його вихід подається сигнал з інформаційного входу у тому випадку, коли є поданий сигнал на керуючий вхід. Якщо керуючий вхідний сигнал нульовий, вихідний сигнал ключа відсутній. Керуючі вхідні сигнали 109, 112, 115, 118, 121 ключів 94-98 формуються блоком ідентифікації відмов 58, керуючі вхідні сигнали 110, 113, 116, 119, 122 ключів 99-103 формуються блоком ідентифікації відмов 59, керуючі вхідні сигнали 111, 114, 117, 120, 123 ключів 104-108 формуються блоком ідентифікації відмов 60, керуючі вхідні сигнали 143, 146, 149, 152, 155 ключів 128132 формуються блоком ідентифікації відмов 64, керуючі вхідні сигнали 144, 147, 150, 153, 156 ключів 133-137 формуються блоком ідентифікації відмов 65, керуючі вхідні сигнали 145, 148, 151, 154, 157 ключів 138-142 формуються блоком ідентифікації відмов 66. Сигнали 70, 71, 72, 73 на інформаційних входах ключів 94-98 формуються за допомогою блока оцінки першого компонента вектора кутової швидкості 61 та обчислювальних пристроїв 46-49. Сигнали 74, 75, 76, 77 на інформаційних входах ключів 99-103 формуються за допомогою блока оцінки другого компонента вектора кутової швидкості 62 та обчислювальних пристроїв 46-49. Сигнали 78, 79, 80, 81 на інформаційних входах ключів 104-108 формуються за допомогою блока оцінки третього компонента вектора кутової швид кості 63 та обчислювальних пристроїв 46-49. Сигнали 82, 83, 84, 85 на інформаційних входах ключів 128-132 формуються за допомогою блока оцінки першого компонента вектора уявного прискорення 67 та обчислювальних пристроїв 5457. Сигнали 86, 87, 88, 89 на інформаційних входах ключів 133-137 формуються за допомогою блока оцінки другого компонента вектора уявного прискорення 68 та обчислювальних пристроїв 5457. Сигнали 90, 91, 92, 93 на інформаційних входах ключів 138-142 формуються за допомогою блока оцінки третього компонента вектора уявного прискорення 69 та обчислювальних пристроїв 5457. Сигнали на інформаційних входах всіх ключів (94-108, 128-142) визначають величину відповідного компонента вектора кутової швидкості та вектора уявного прискорення W . Ті ж самі сигнали подаються на вихід тих ключів, які відкриті сигналом на керуючім вході. Отже, за допомогою систем ключів 94-98, 99-103, 104-408 здійснюється формування вихідної інформації про величини компонентів вектора кутової швидкості а), отриманої в тому обчислювальному пристрої з чотирьох (46-49), на який видають сигнали тільки справні вимірювачі; за допомогою систем ключів 128-132, 133-137, 138-142 здійснюється формування вихідної інформації про величини компонентів вектора уявного прискорення W , отриманої в тому обчислювальному пристрої з чотирьох (54-57), на який видають сигнали тільки справні вимірювачі. При відсутності вимірювача, що відмовив, вихідна інформація обчислювальних пристроїв 46, 47, 48, 49 використовується для підвищення точності вимірювання вектора кутової швидкості, обробляється з використанням блоків 61, 62, 63 оцінки компонентів вектора кутової швидкості , та за допомогою ключів 94, 99, 104 подається на вихід системи; вихідна інформація обчислювальних пристроїв 54, 55, 56, 57 використовується для підвищення точності вимірювання вектора уявного прискорення, обробляється з використанням блоків 67, 68, 69 оцінки компонентів вектора уявного прискорення W , та за допомогою ключів 128, 133, 138 подається на вихід системи. 23 Взаємозв'язок елементів обробки інформації можна зобразити за допомогою таблиці 5. 55276 24 25 55276 26 Таблиця 5 2 3 4 5 6 7 8 Всі вимірювачі справні 115 118 121 109 71 72 73 70 Номер відкритого ключа 95 Вихідний сигнал блока ідентифікації відмов 59 (управляючий 113 Канал сигнал) ωY Інформаційний сигнал 75 96 97 98 Вихідний сигнал блоку 61 94 112 119 122 110 76 77 74 Номер відкритого ключа 100 Вихідний сигнал блока ідентифікації відмов 60 (управляючий 114 Кaнaл сигнал) ωZ Інформаційний сигнал 79 101 102 103 Вихідний сигнал блоку 62 99 117 120 123 111 80 81 78 Номер відкритого ключа 105 Вихідний сигнал блока ідентифікації відмов 64 (управляючий Кaнaл сигнал) WX Інформаційний сигнал 106 107 108 Вихідний сигнал блоку 63 104 146 149 152 155 143 83 84 85 82 Номер вимірювача, що відмовив Вихідний сигнал блока ідентифікації відмов 58 (управляючий Канал сигнал) ωX Інформаційний сигнал 1 Номер відкритого ключа Вихідний сигнал блока ідентифікації відмов 65 (управляючий Канал сигнал) WY Інформаційний сигнал 129 130 131 132 Вихідний сигнал блоку 67 128 147 150 153 156 144 » 87 88 89 86 Номер відкритого ключа Вихідний сигнал блока ідентифікації відмов 66 (управляючий Канал сигнал) WZ Інформаційний сигнал 134 135 136 137 Вихідний сигнал блоку 68 133 148 151 154 157 145 91 92 93 90 Номер відкритого ключа Номер обчислювального пристрою, інформація якого поступає на вихід інерціального блоку 139 140 141 142 49 46 55 56 57 54 46, 47, 48, 49, 54, 55, 56, 57 1, 2, 3, 4, 5, 6, 7 1, 2, 3, 4, 5, 6, 7, 8 47 2, 3, Номера вимірювачів, що використову4, 5, ються для формування вихідної інфор6, 7, мації 8 48 1, 3, 4, 5, 6, 7, 8 Для безпосереднього формування вихідних сигналів по кожному компоненту вектора кутової швидкості служать логічні елементи "або" 124, 125, 126. Для безпосереднього формування вихідних сигналів по кожному компоненту вектора уявного прискорення W служать логічні елементи "або" 158,159, 160. Із входами кожного з них з'єднані виходи всіх ключів, що входять у відповідний канал. На виході елементів 124, 125, 126 формуються сигнали 51, 52, 53, які видаються одним з ключів кожної системи. Сигнали 51, 52, 53 містять інформацію про компоненти ωX, ωY, ωZ відповідно вектора кутової швидкості . На виході елементів 158, 159, 160 формуються сигнали 161, 162, 163, 1, 2, 1, 2, 4, 5, 3, 5, 6, 7, 6, 7, 8 8 1, 2, 1, 2, 1, 2, 3, 4, 3, 4, 3, 4, 6, 7, 5, 7, 5, 6, 8 8 8 Вихідний сигнал блоку 69 138 які видаються одним з ключів кожної системи. Сигнали 161, 162, 163 містять інформацію про компоненти WZ, WY, WZ відповідно вектора уявного прискорення W . Логічні елементи "або" 164, 165, 166, 167, 174, 175, 176, 177 та системи індикації і резервування 172, 182 служать для формування сукупності сигналів 173, 183, які при необхідності можуть бути використані для: - індикації номера вимірювача, що відмовив; - виключення приладу, що відмовив, з структури вимірювального блоку; - заміни вимірювача, що відмовив, іншим при наявності резерву; 27 - включення системи корекції вимірювача, що відмовив, при відповідних видах відмов. На вхід елементів "або" 164, 165, 166, 167, 174, 175, 176, 177 подаються сигнали про відмови першого, другого, третього, четвертого, п'ятого, шостого, сьомого, восьмого вимірювачів відповідно, що формуються кожним блоком ідентифікації відмов 58, 59, 60, 64, 65, 66 по кожному компоненту вектора кутової швидкості та вектора уявного прискорення W . Вихідні сигнали 168, 169, 170, 171, 178, 179, 180, 181 елементів 164, 165, 166, 167, 174, 175, 176, 177 з'являються, якщо хоча б 55276 28 один блок ідентифікації відмов формує вихідний сигнал про відмову одного з вимірювачів. При відсутності вимірювача, що відмовив, вхідних сигналів елементів 164, 165, 166, 167, 174, 175, 176, 177 немає. Таким чином, запропонований інерціальний вимірювальний блок дозволяє підвищити надійність визначення інерціальної та навігаційної інформації в випадках відмов одного вимірювача кутової швидкості та одного вимірювача уявного прискорення. 29 55276 30 31 55276 32 33 55276 34 35 Комп’ютерна верстка Г. Паяльніков 55276 Підписне 36 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial measuring unit
Автори англійськоюHordin Oleksandr Hryhorovych, Ponomariov Vadym Serhiiovych, Kopysov Oleh Eduardovych
Назва патенту російськоюИнерциальный измерительный блок
Автори російськоюГордин Александр Григорьевич, Пономарев Вадим Сергеевич, Кописов Олег Эдуардович
МПК / Мітки
МПК: G01C 21/00
Мітки: інерціальній, блок, вимірювальний
Код посилання
<a href="https://ua.patents.su/18-55276-inercialnijj-vimiryuvalnijj-blok.html" target="_blank" rel="follow" title="База патентів України">Інерціальний вимірювальний блок</a>
Інерціальний вимірювальний блок
Номер патенту: 37386
Опубліковано: 25.11.2008
Автори: Гордін Олександр Григорович, Шульгіна Людмила Андріївна
МПК: G01P 9/00
Мітки: вимірювальний, інерціальній, блок
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, який відрізняється тим, що однокомпонентні гіроскопічні датчики кутової швидкості та однокомпонентні маятникові акселерометри зорієнтовані на об'єкті таким чином, що осі підвісу рухомих елементів...
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Гордін Олександр Григорович, Калашникова Валерія Михайлівна, Шипітько Олена Олександрівна
МПК: G01C 21/00
Мітки: функціонально-надлишковий, вимірювальний, блок, інерціальній
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Інерціальний вимірювальний блок
Номер патенту: 54017
Опубліковано: 25.10.2010
Автори: Кописов Олег Едуардович, Гордін Олександр Григорович, Кулік Анатолій Степанович, Пономарьов Вадим Сергійович
МПК: G01P 9/00
Мітки: інерціальній, блок, вимірювальний
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентні гіроскопічні датчики кутової швидкості, три однокомпонентні маятникові акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів датчиків взаємно ортогональні та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів однокомпонентних...
Інерціальний вимірювальний блок
Номер патенту: 46952
Опубліковано: 11.01.2010
Автори: Гордін Олександр Григорович, Тамбова Ольга Сергіївна
МПК: G01P 9/04
Мітки: інерціальній, вимірювальний, блок
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості, який відрізняється тим, що в нього введено три гіроскопічних інтегратори лінійних прискорень з міжрамочною корекцією, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, при цьому осі чутливості гіроскопічних інтеграторів лінійних прискорень взаємоортогональні та кожна з них паралельна відповідній...
Безплатформний інерціальний блок

Номер патенту: 35089
Опубліковано: 26.08.2008
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Апоян Армен Генрікович, Субота Анатолій Максимович, Златкін Олег Юрьєвич
МПК: G01C 21/00
Мітки: інерціальній, безплатформний, блок
Формула / Реферат:
Безплатформний інерціальний вимірювальний блок, що містить основу, на котрій розміщені гіроскопи, акселерометри, джерела струму, сервісні електронні блоки, який відрізняється тим, що відносно кожної ортогональної осі установлено по мікромеханічному акселерометру, осі чутливості яких співпадають з названими осями, і три мікромеханічні двовісні датчики кутової швидкості, осі чутливості першого з них паралельні осям Х і Y, другого - осям Y і Z,...
Попередній патент: Спосіб установки ін’єкційних анкерів в гірських породах
Наступний патент: Обприскувач з регульованою дисперсністю розпилення
Випадковий патент: Курильний виріб і спосіб його виготовлення