Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Гордін Олександр Григорович, Шипітько Олена Олександрівна, Калашникова Валерія Михайлівна
Формула / Реферат
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з обчислювальних пристроїв з'єднаний з виходами першого, другого і третього вимірювачів, вхід другого - з виходами другого, третього і четвертого вимірювачів, вхід третього - з виходами першого, третього і четвертого вимірювачів, вхід четвертого - з виходами першого, другого і четвертого вимірювачів, три блоки ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, відповідно, на вхід першого, другого і третього, з яких подається відповідна сукупність перших, других, третіх компонентів параметра, що вимірюється, з виходів чотирьох обчислювальних пристроїв, три блоки оцінки компонентів параметра, який вимірюється, при всіх справних вимірювачах, на вхід першого, другого та третього, з яких подається відповідна сукупність перших, других, третіх компонентів параметра, що вимірюється, з виходів обчислювальних пристроїв, три ідентичні системи ключів, що забезпечують видачу на вихід інерціального вимірювального блока трьох компонентів параметра, що вимірюється, для будь-якого з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, причому кожна система містить у своєму складі п'ять ключів, на керуючий вхід кожного з яких подається відповідний вихідний сигнал кожного блока ідентифікації відмов вимірювачів, а на інформаційний вхід першого ключа кожної системи подається вихідний сигнал відповідної схеми обробки інформації, на інформаційні входи другого, третього, четвертого та п'ятого ключів кожної системи подаються вихідні сигнали другого, третього, четвертого, першого обчислювальних пристроїв відповідно, сім логічних елементів АБО, які безпосередньо формують три компоненти параметра, що вимірюється, та інформацію про вимірювач, що відмовив, причому входи трьох логічних елементів АБО з'єднані з виходами першої, другої та третьої систем ключів, а входи чотирьох інших логічних елементів АБО з'єднані з виходами блоків ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, з урахуванням номера вимірювача, що відмовив, а виходи цих чотирьох логічних елементів АБО з'єднані з входом схеми індикації або резервування вимірювачів.
2. Функціонально-надлишковий інерціальний вимірювальний блок по п. 1, який відрізняється тим, що кожний блок ідентифікації відмов вимірювачів містить шість допускових компараторів, на вхід кожного з яких подається одна з шести можливих пар сполучень вихідних сигналів одного компонента параметра, що вимірюється, які формуються за допомогою чотирьох обчислювальних пристроїв: першого допускового компаратора - першого та другого, другого - першого та третього, третього - першого та четвертого, четвертого - другого та третього, п'ятого - другого та четвертого, шостого - третього та четвертого, а вихідні сигнали компараторів - один позитивний, що відповідає збігу вхідних сигналів у межах прийнятого допуску, другий негативний, який відповідає їх різниці у межах встановленого допуску - подаються на входи п'яти логічних елементів і, кожний з яких відповідає певному сполученню позитивних та негативних вхідних сигналів і одному з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, по відповідному компоненту параметра, що вимірюється, причому виходи логічних елементів і з'єднані з керуючими входами відповідної системи ключів та входами логічних елементів АБО.
Текст
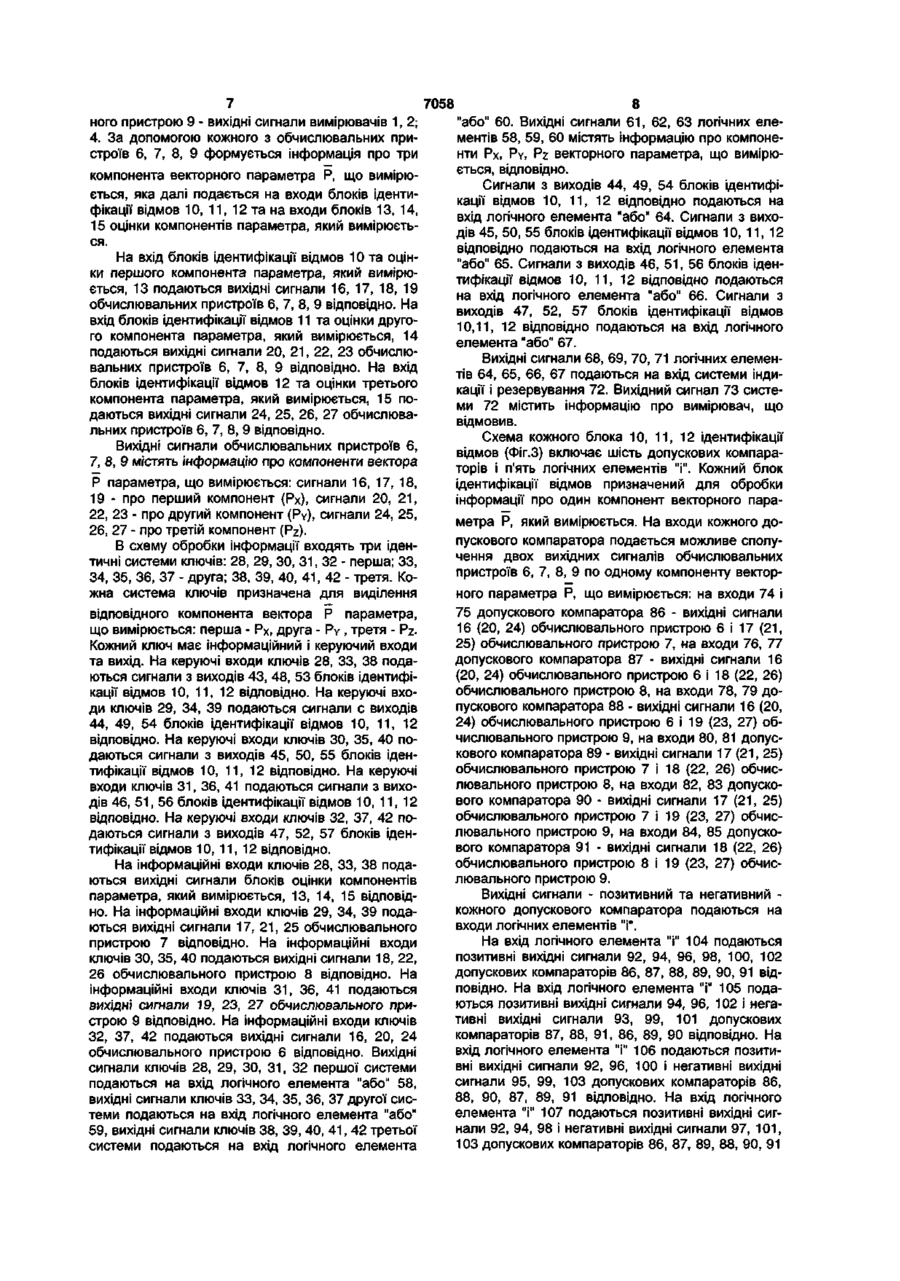
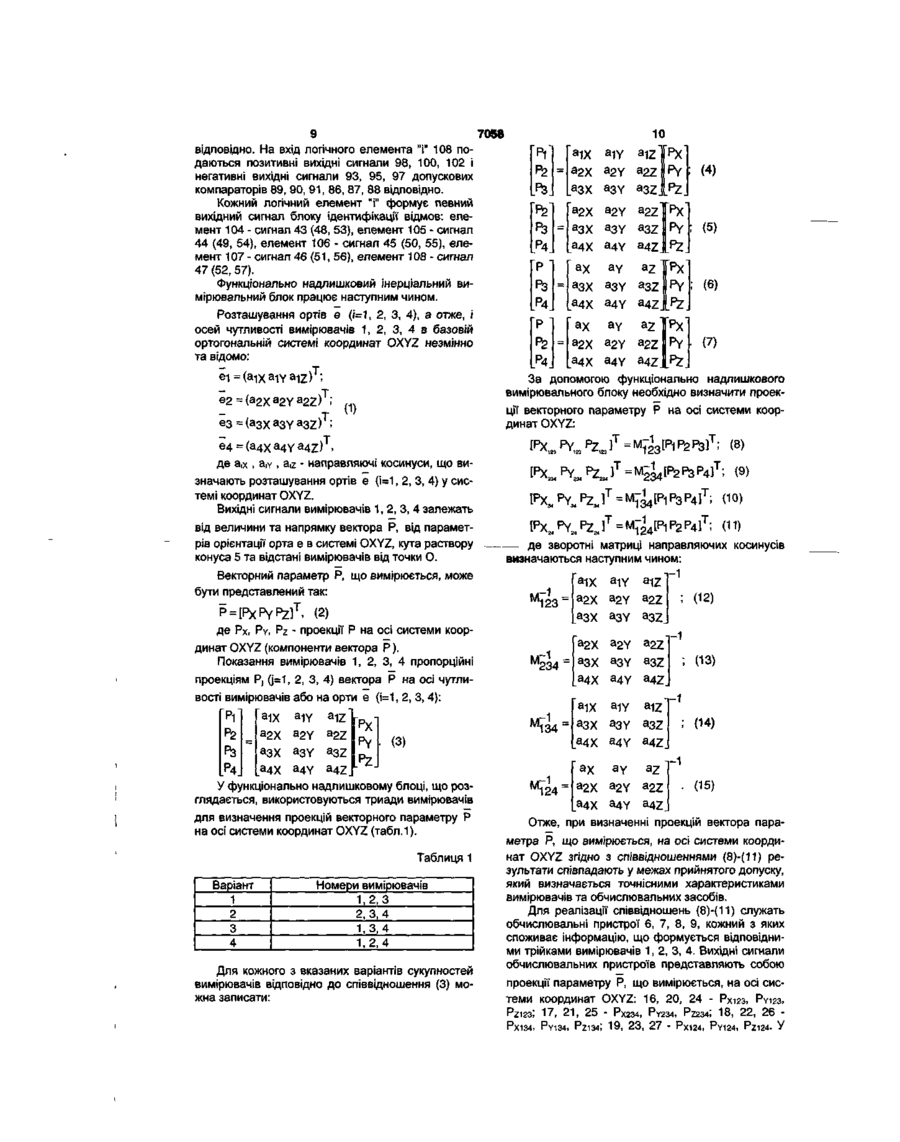
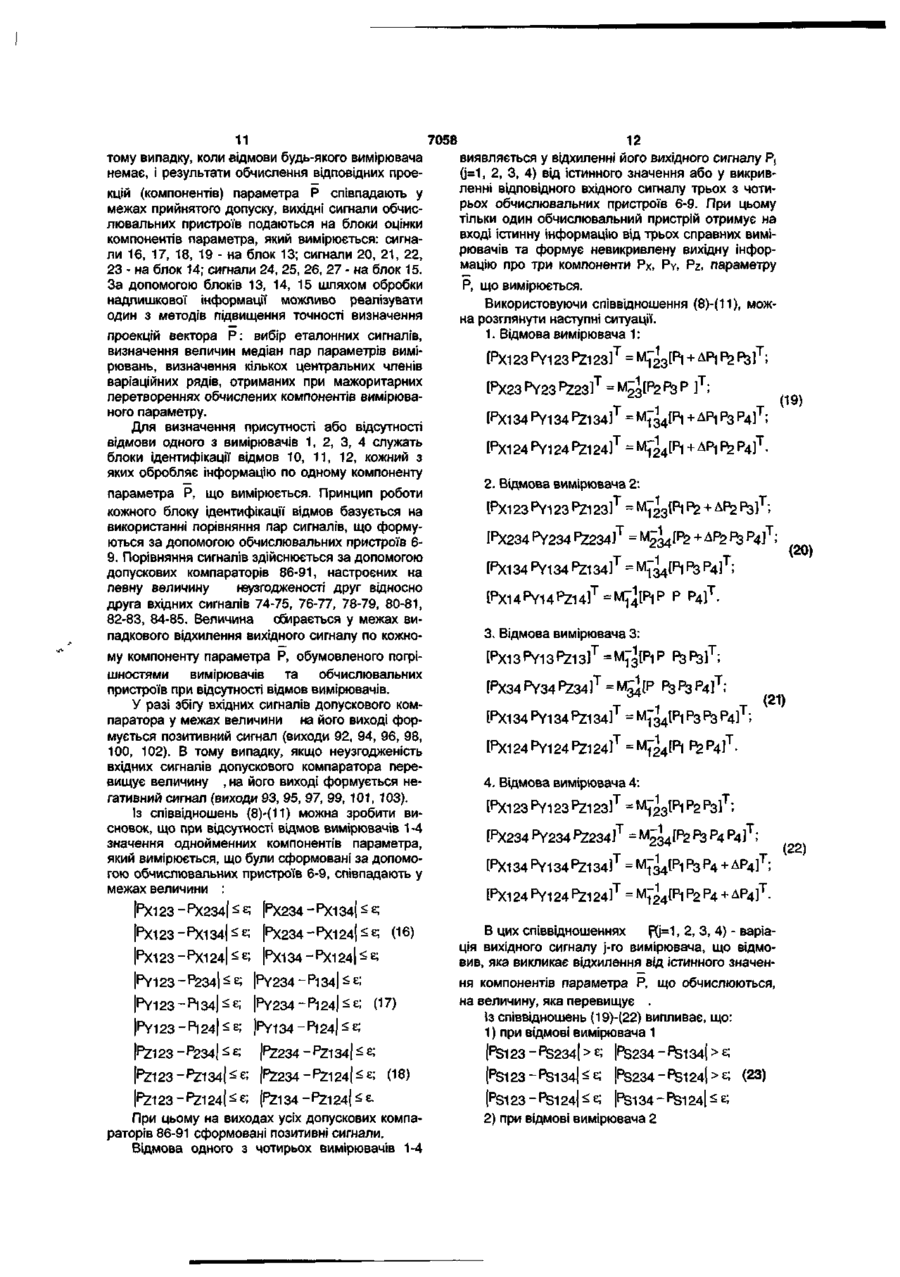
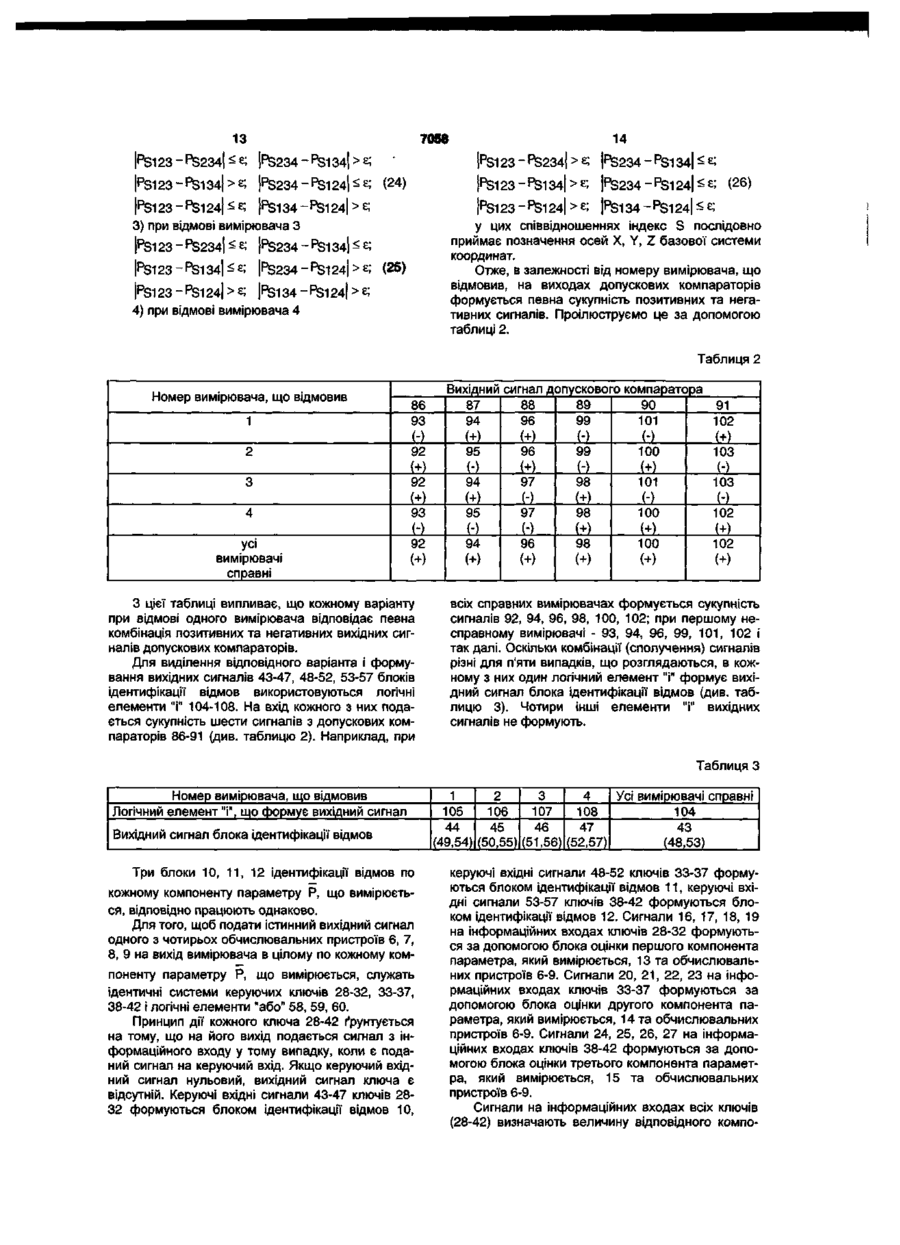
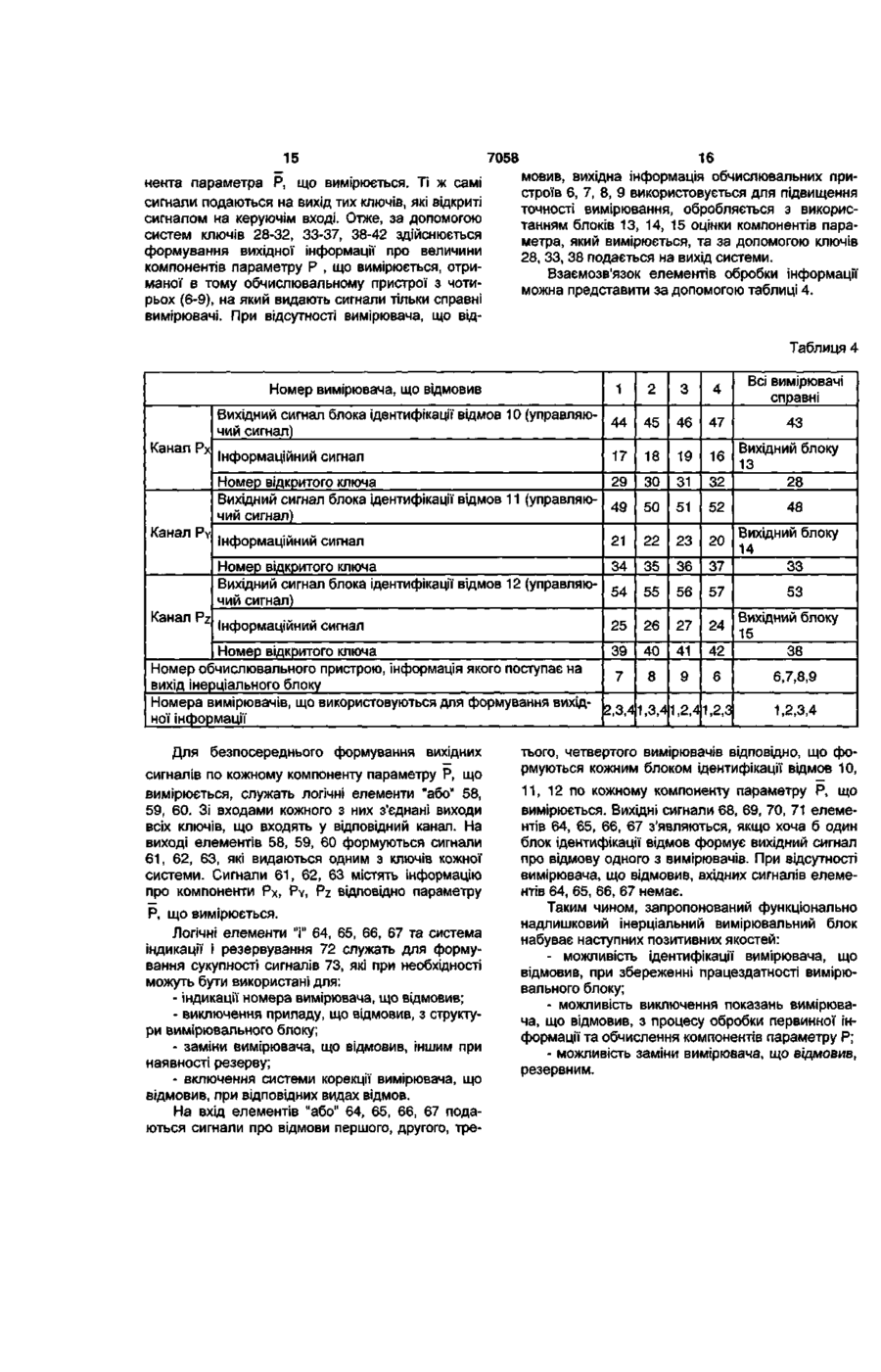
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з обчислювальних пристроїв з'єднаний з виходами першого, другого і третього вимірювачів, вхід другого - з виходами другого, третього і четвертого вимірювачів, вхід третього - з виходами першого, третього і четвертого вимірювачів, вхід четвертого - з виходами першого, другого і четвертого вимірювачів, три блоки ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, відповідно, на вхід першого, другого і третього, з яких подається відповідна сукупність перших, других, третіх компонентів параметра, що вимірюється, з виходів чотирьох обчислювальних пристроїв, три блоки оцінки компонентів параметра, який вимірюється, при всіх справних вимірювачах, на вхід першого, другого та третього, з яких подається відповідна сукупність перших, других, третіх компонентів параметра, що вимірюється, з виходів обчислювальних пристроїв, три ідентичні системи ключів, що забезпечують видачу на вихід інерціального вимірювального блока трьох компонентів параметра, що вимірюється, для будь-якого з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, причому кожна система містить у своєму складі п'ять ключів, на керуючий вхід кожного з яких подається відповідний вихідний сигнал кожного блока ідентифікації відмов вимірювачів, а на інформаційний вхід першого ключа кожної системи подається вихідний сигнал відповідної схеми обробки інформації, на інформаційні входи другого, третього, четвертого та п'ятого ключів кожної системи подаються вихідні сигнали другого, третього, четвертого, першого обчислювальних пристроїв відповідно, сім логічних елементів АБО, які безпосередньо формують три компоненти параметра, що вимірюється, та інформацію про вимірювач, що відмовив, причому входи трьох логічних елементів АБО з'єднані з виходами першої, другої та третьої систем ключів, а входи чотирьох інших логічних елементів АБО з'єднані з виходами блоків ідентифікації відмов вимірювачів по кожному компоненту параметра, що вимірюється, з урахуванням номера вимірювача, що відмовив, а виходи цих чотирьох логічних елементів АБО з'єднані з входом схеми індикації або резервування вимірювачів. 2. Функціонально-надлишковий інерціальний вимірювальний блок по п. 1, який відрізняється тим, що кожний блок ідентифікації відмов вимірювачів містить шість допускових компараторів, на вхід кожного з яких подається одна з шести можливих пар сполучень вихідних сигналів одного компонента параметра, що вимірюється, які формуються за допомогою чотирьох обчислювальних пристроїв: першого допускового компаратора - першого та другого, другого - першого та третього, третього першого та четвертого, четвертого - другого та третього, п'ятого - другого та четвертого, шостого третього та четвертого, а вихідні сигнали компараторів - один позитивний, що відповідає збігу вхідних сигналів у межах прийнятого допуску, другий негативний, який відповідає їх різниці у межах встановленого допуску - подаються на входи п'яти логічних елементів і, кожний з яких відповідає певному сполученню позитивних та негативних вхідних сигналів і одному з варіантів сукупностей справних вимірювачів та вимірювача, що відмовив, по відповідному компоненту параметра, що вимірюється, причому виходи логічних елементів і з'єднані з керуючими входами відповідної системи ключів та входами логічних елементів АБО. 00 ю о о> 7058 Корисна модель відноситься до галузі вимірювальної техніки та може бути використана для визначення інерціальних параметрів (компонентів векторів кутової швидкості або уявного прискорення) рухомих об'єктів у просторі в системах стабілізації, навігації, наведення, зокрема - в безкарданих інерціальних (безплатформених) системах навігації (БІСН). Керування рухомим об'єктом з високою точністю можливо забезпечити на основі використання прецизійних та високонадійних вимірювачів векторних кінематичних параметрів об'єкта та відповідних алгоритмів обробки одержаної інформації. Традиційним та природним шляхом поліпшення характеристик точності та надійності інформації, що одержується в результаті вимірювань, є підвищення показників точності та надійності інерціальних вимірювачів. Цей шлях, як відомо, потребує великих наукових, виробничих та технологічних зусиль, що пов'язане зі значними витратами. Задача підвищення надійності отримання інерціальної інформації стосовно БІСН може бути вирішена шляхом резервування на рівні вимірювальних елементів. У цьому випадку використовують дублювання або потроєння вимірювачів у кожному з вимірювальних блоків з ортогональним розташуванням осей чутливості. Ці осі вимірювачів, що утворюють дубль або тріаду, паралельні відповідній вимірювальній осі. Дублювання та потроєння вимірювачів в ортогональному базисі має ряд вагомих недоліків. В таких структурнонадлишкових системах далеко не оптимальним чином використовуються можливості, зумовлені застосуванням вимірювачів у кількості, яка перевищує мінімально необхідну для вимірювання векторних величин. При дублюванні використовують шість вимірювачів, розташованих по два так, що їх осі чутливості колінеарні кожній осі ортогонального базового тригранника. Така конфігурація дозволяє встановити факт появи несправності вимірювача, однак у випадку некатастрофічної відмови не дає можливості визначити без використання зовнішньої інформації, який з двох вимірювачів видає помилкові (хибні) показання. Потрійне резервування, при якому по кожній з ортогональних осей встановлюється по три ідентичних вимірювача, дає можливість автономно встановити факт відмови та ідентифікувати несправний вимірювач. З такою метою порівнюються один з другим сигнали вимірювачів, і якщо два з них видають однакові сигнали, а третій - сигнал, який відрізняється, то останній датчик є несправним. Потрійне резервування забезпечує високу надійність вимірювального блоку та підвищення точності вимірювань за рахунок відповідної обробки надлишкової інформації. Однак це досягається шляхом використання дев'яти вимірювачів, що є недоліком подібних схем, тому що значною мірою ускладнює вимірювальний блок, підвищує його масу та габарити, зменшує надійність. [Епифанов А. Д. Избыточные системы управления летательными аппаратами. - М.: Машиностроение, 1978, с.42-49; Дмитроченко Л.А. и др. Бесплатформенные инерциальные навигационные системы. - М.: МАИ, 1984, с.35-38]. Врахувати вплив як позитивних, так і негативних факторів та добитися їх раціонального сполучення можливо на основі використання принципу функціональної надлишковості вимірювачів. Реалізація такої форми надлишковості базується на використанні неортогональних систем координат. Осі чутливості усіх вимірювачів по-різному орієнтовані в просторі, так що колінеарність відсутня і ніякі три осі чутливості некомпланарні. Конфігурація вимірювального блоку, яка задовольняє цим вимогам, забезпечує лінійну незалежність векторів, зв'язаних з осями чутливості вимірювачів, що дозволяє формувати ряд неортогональних вимірювальних базисів. Будь-яка трійка вимірювачів дає можливість отримати інформацію про вимірюваний векторний параметр. При надлишковій кількості вимірювачів загальне число незалежних базисів перевищує одиницю. Мінімально надлишковий неортогональний вимірювальний блок з надлишковістю, що дорівнює одиниці, складається з чотирьох вимірювачів з неортогональними та неколінеарними осями чутливості. Відомо, що конфігурація надлишкового вимірювального блоку БІСІЧ може бути різною у разі виконання умови: орієнтація осі чутливості кожного вимірювача системи має бути однозначно визначена в основному вимірювальному ортогональному базисі, який жорстко зв'язаний з рухомим об'єктом. В подібних функціонально надлишкових системах осі чутливості п вимірювачів (п більше трьох) лінійно незалежні та утворюють в загальному випадку неортогональний базис [Епифанов А.Д. Избыточные системы управления летательными аппаратами. - М.: Машиностроение, 1978; Епифанов А.Д. Надежность систем управления. М.: Машиностроение, 1975; Дмитроченко Л.А. и др. Бесплатформенные инерциальные навигационные системы. - М.: МАИ, 1984; Идентификация неисправных чувствительных элементов бесплатформенной навигационной системы истребителя с помощью обобщенного критерия правдоподобия. ЭИ "Авиастроение", №34, 1981; Оптимальная интеграция функций инерциальных устройств в системах управления. ЭИ "Авиастроение", №21, 1990; Эдварде. Бесплатформенные инерциальные навигационные системы. Вопросы ракетной техники, №5, 1973, с.47-71]. В якості прототипу розглядається функціонально надлишковий інерціальний вимірювальний блок, що містить чотири одноступеневих вимірювача довільно спрямованого векторного параметру, осі чутливості яких представляють вимірювальний базис, розташовані по твірним конуса та мають спільний початок на осі конуса [Епифанов А.Д. Избыточные системы управления летательными аппаратами. - М.: Машиностроение, 1978, с.72-81, с.126-136; Дмитроченко Л.А. и др. Бесплатформенные инерциальные навигационные системы. - М.: МАИ, 1984, с.36-39]. В подібному вимірювальному блоці для ідентифікації відмов датчиків здійснюється попарне порівняння складових вектора, що вимірюється, отриманих лінійно незалежними надлишковими 7058 вимірювачами. Така система дозволяє автономно що вимірюється, з урахуванням номера вимірювавиявити відмову одного з датчиків інформації, зача, що відмовив, а виходи цих чотирьох логічних лишаючись при цьому працездатною. Відмова елементів "або" з'єднані з входом схеми індикації одного з них виявляється при появі неузгодження або резервування вимірювачів. їх вихідних сигналів, однак ідентифікувати вимірюПоставлена задача досягається також тим, що вач, що відмовив, як і в разі дубльованої ортогов системі обробки інформації функціонально наднальної системи датчиків, неможливо, що є недолишкового інерціального вимірювача кожний блок ліком. Таким чином недоліком прототипу є ідентифікації відмов вимірювачів містить шість неможливість забезпечити необхідну надійність та допускових компараторів, на вхід кожного з яких точність вимірювань векторного параметру за доподається одна з шести можливих пар сполучень помогою блоку з чотирма одноступеневими вимівихідних сигналів одного компонента параметра, рювачами. що вимірюється, які формуються за допомогою чотирьох обчислювальних пристроїв: першого доПоставлена задача - досягнення можливості пускового компаратора - першого та другого, друідентифікації вимірювача, що відмовив. гого - першого та третього, третього - першого та Поставлена задача досягається тим, що в фучетвертого, четвертого - другого та третього, п'янкціонально надлишковий інерціальний вимірюватого - другого та четвертого, шостого - третього та льний блок, що містить чотири одноступеневих четвертого, а вихідні сигнали компараторів - один вимірювача довільно спрямованого векторного позитивний, що відповідає збігу вхідних сигналів у параметру, осі чутливості яких представляють межах прийнятого допуску, другий негативний, вимірювальний базис, розташовані по твірним який відповідає їх різниці у межах встановленого конуса та мають спільний початок на осі конуса, допуску - подаються на входи п'яти логічних елевведена система обробки інформації згідно з коментів "і", кожний з яких відповідає певному спорисною моделлю, яка включає чотири обчислювалученню позитивних та негативних вхідних сигнальних пристрої, що споживають інформацію вимілів і одному з варіантів сукупностей справних рювачів, вхід першого з обчислювальних вимірювачів та вимірювача, що відмовив, по відпристроїв з'єднаний з виходами першого, другого і повідному компоненту параметра, що вимірюєтьтретього вимірювачів, вхід другого - з виходами ся, причому виходи логічних елементів "і" з'єднані другого, третього і четвертого вимірювачів, вхід з керуючими входами відповідної системи ключів третього - з виходами першого, третього і четверта входами логічних елементів "або". того вимірювачів, вхід четвертого - з виходами першого, другого і четвертого вимірювачів, три На Фіг.1 приведена кінематична схема систеблоки ідентифікації відмов вимірювачів по кожноми чотирьох інерціальних вимірювачів відносно му компоненту параметра, що вимірюється, відпобазової ортогональної системи координат; на Фіг.2 відно, на вхід першого, другого і третього з яких -структурно-функціональна схема системи обробподається відповідна сукупність перших, других, ки інформації функціонально надлишкового інертретіх компонентів параметра, що вимірюється, з ціального вимірювального блоку; на Фіг.З - струквиходів чотирьох обчислювальних пристроїв, три турно-функціональна схема блоку ідентифікації блоки оцінки компонентів параметра, який вимірювідмов вимірювачів. ється, при всіх справних вимірювачах, на вхід Функціонально надлишковий інерціальний першого, другого та третього з яких подається блок (Фіг.1) містить чотири одноступеневих вимівідповідна сукупність перших, других, третіх комрювача 1, 2, 3, 4 довільно спрямованого векторнопонентів параметра, що вимірюється, з виходів го параметру Р, осі чутливості яких (на Фіг.1 вкаобчислювальних пристроїв, три ідентичні системи зані стрілками) представляють вимірювальний ключів, що забезпечують видачу на вихід інерціабазис, розташовані по твірним конуса 5 та мають льного вимірювального блоку трьох компонентів спільний початок на осі конуса (точка О), що перепараметра, що вимірюється, для будь-якого з варіантів сукупностей справних вимірювачів та вимісікає початок базової ортогональної системи кооррювача, що відмовив, причому кожна система місдинат OXYZ. Орт є визначає розташування осі тить у своєму складі п'ять ключів, на керуючий вхід конуса в системі OXYZ, орти ej (і=1, 2, 3, 4) визнакожного з яких подається відповідний вихідний чають напрям осей чутливості вимірювачів в тій сигнал кожного блоку ідентифікації відмов вимірюсамій системі координат. Розташування вимірювавачів, а на інформаційний вхід першого ключа кочів в системі координат OXYZ відомо. жної системи подається вихідний сигнал відповідСистема обробки інформації (Фіг.2) включає ної схеми обробки інформації, на інформаційні входи другого, третього, четвертого та п'ятого чотири обчислювальних пристрої 6, 7, 8, 9, за доключів кожної системи подаються вихідні сигнали помогою яких на основі показань вимірювачів 1, 2, другого, третього, четвертого, першого обчислюЗ, 4 згідно зі спеціальними алгоритмами здійснювальних пристроїв відповідно, сім логічних елемеється визначення компонентів вектора Р, що винтів "або", які безпосередньо формують три коммірюється. Кількість обчислювальних пристроїв понента параметра, що вимірюється, та зумовлена числом можливих комбінацій вихідних інформацію про вимірювач, що відмовив, причому сигналів вимірювачів по три з чотирьох. На вхід входи трьох логічних елементів "або" з'єднані з обчислювального пристрою 6 подаються вихідні виходами першої, другої та третьої систем ключів, сигнали вимірювачів 1,2,3; на вхід обчислювальа входи чотирьох інших логічних елементів "або" ного пристрою 7 - вихідні сигнали вимірювачів 2, З, з'єднані з виходами блоків ідентифікації відмов 4; на вхід обчислювального пристрою 8 - вихідні вимірювачів по кожному компоненту параметра, сигнали вимірювачів 1, 3, 4; на вхід обчислюваль 7058 ного пристрою 9 - вихідні сигнали вимірювачів 1, 2; 4. За допомогою кожного з обчислювальних пристроїв 6, 7, 8, 9 формується інформація про три компонента векторного параметра Р, що вимірюється, яка далі подається на входи блоків ідентифікації відмов 10, 11, 12 та на входи блоків 13, 14, 15 оцінки компонентів параметра, який вимірюється. На вхід блоків ідентифікації відмов 10 та оцінки першого компонента параметра, який вимірюється, 13 подаються вихідні сигнали 16, 17, 18, 19 обчислювальних пристроїв 6, 7, 8, 9 відповідно. На вхід блоків ідентифікації відмов 11 та оцінки другого компонента параметра, який вимірюється, 14 подаються вихідні сигнали 20, 21, 22, 23 обчислювальних пристроїв 6, 7, 8, 9 відповідно. На вхід блоків ідентифікації відмов 12 та оцінки третього компонента параметра, який вимірюється, 15 подаються вихідні сигнали 24, 25, 26, 27 обчислювальних пристроїв 6, 7, 8, 9 відповідно. Вихідні сигнали обчислювальних пристроїв 6, 7, 8, 9 містять інформацію про компоненти вектора Р параметра, що вимірюється: сигнали 16, 17, 18, 19 - про перший компонент (Рх), сигнали 20, 21, 22, 23 - про другий компонент (Ру), сигнали 24, 25, 26, 27 - про третій компонент (Pz). В схему обробки інформації входять три ідентичні системи ключів: 28, 29, ЗО, 31, 32 - перша; 33, 34, 35, 36, 37 - друга; 38, 39, 40, 41, 42 - третя. Кожна система ключів призначена для виділення відповідного компонента вектора Р параметра, що вимірюється: перша - Рх, друга - Ру , третя - Pz. Кожний ключ має інформаційний і керуючий входи та вихід. На керуючі входи ключів 28, 33, 38 подаються сигнали з виходів 43, 48, 53 блоків ідентифікації відмов 10, 11, 12 відповідно. На керуючі входи ключів 29, 34, 39 подаються сигнали с виходів 44, 49, 54 блоків ідентифікації відмов 10, 11, 12 відповідно. На керуючі входи ключів ЗО, 35, 40 подаються сигнали з виходів 45, 50, 55 блоків ідентифікації відмов 10, 11, 12 відповідно. На керуючі входи ключів 31, 36, 41 подаються сигнали з виходів 46, 51, 56 блоків ідентифікації відмов 10, 11, 12 відповідно. На керуючі входи ключів 32, 37, 42 подаються сигнали з виходів 47, 52, 57 блоків ідентифікації відмов 10, 11, 12 відповідно. На інформаційні входи ключів 28, 33, 38 подаються вихідні сигнали блоків оцінки компонентів параметра, який вимірюється, 13, 14, 15 відповідно. На інформаційні входи ключів 29, 34, 39 подаються вихідні сигнали 17, 21, 25 обчислювального пристрою 7 відповідно. На інформаційні входи ключів ЗО, 35, 40 подаються вихідні сигнали 18, 22, 26 обчислювального пристрою 8 відповідно. На інформаційні входи ключів 31, 36, 41 подаються вихідні сигнали 19, 23, 21 обчислювального пристрою 9 відповідно. На інформаційні входи ключів 32, 37, 42 подаються вихідні сигнали 16, 20, 24 обчислювального пристрою 6 відповідно. Вихідні сигнали ключів 28, 29, ЗО, 31, 32 першої системи подаються на вхід логічного елемента "або" 58, вихідні сигнали ключів 33, 34, 35, 36, 37 другої системи подаються на вхід логічного елемента "або" 59, вихідні сигнали ключів 38, 39, 40, 41, 42 третьої системи подаються на вхід логічного елемента 8 "або" 60. Вихідні сигнали 61, 62, 63 логічних елементів 58, 59, 60 містять інформацію про компоненти Рх, PY, Pz векторного параметра, що вимірюється, відповідно. Сигнали з виходів 44, 49, 54 блоків ідентифікації відмов 10, 11, 12 відповідно подаються на вхід логічного елемента "або" 64. Сигнали з виходів 45, 50, 55 блоків ідентифікації відмов 10, 11, 12 відповідно подаються на вхід логічного елемента "або" 65. Сигнали з виходів 46, 51, 56 блоків ідентифікації відмов 10, 11, 12 відповідно подаються на вхід логічного елемента "або" 66. Сигнали з виходів 47, 52, 57 блоків ідентифікації відмов 10,11, 12 відповідно подаються на вхід логічного елемента "або" 67. Вихідні сигнали 68, 69, 70, 71 логічних елементів 64, 65, 66, 67 подаються на вхід системи індикації і резервування 72. Вихідний сигнал 73 системи 72 містить інформацію про вимірювач, що відмовив. Схема кожного блока 10, 11, 12 ідентифікації відмов (Фіг.З) включає шість допускових компараторів і п'ять логічних елементів "і". Кожний блок ідентифікації відмов призначений для обробки інформації про один компонент векторного параметра Р, який вимірюється. На входи кожного допускового компаратора подається можливе сполучення двох вихідних сигналів обчислювальних пристроїв 6, 7, 8, 9 по одному компоненту векторного параметра Р, що вимірюється: на входи 74 і 75 допускового компаратора 86 - вихідні сигнали 16 (20, 24) обчислювального пристрою 6 і 17 (21, 25) обчислювального пристрою 7, на входи 76, 77 допускового компаратора 87 - вихідні сигнали 16 (20, 24) обчислювального пристрою 6 і 18 (22, 26) обчислювального пристрою 8, на входи 78, 79 допускового компаратора 88 - вихідні сигнали 16 (20, 24) обчислювального пристрою 6 і 19 (23, 27) обчислювального пристрою 9, на входи 80, 81 допускового компаратора 89 - вихідні сигнали 17 (21, 25) обчислювального пристрою 7 і 18 (22, 26) обчислювального пристрою 8, на входи 82, 83 допускового компаратора 90 - вихідні сигнали 17 (21, 25) обчислювального пристрою 7 і 19 (23, 27) обчислювального пристрою 9, на входи 84, 85 допускового компаратора 91 - вихідні сигнали 18 (22, 26) обчислювального пристрою 8 і 19 (23, 27) обчислювального пристрою 9. Вихідні сигнали - позитивний та негативний кожного допускового компаратора подаються на входи логічних елементів "і". На вхід логічного елемента "і" 104 подаються позитивні вихідні сигнали 92, 94, 96, 98, 100, 102 допускових компараторів 86, 87, 88, 89, 90, 91 відповідно. На вхід логічного елемента "і" 105 подаються позитивні вихідні сигнали 94, 96, 102 і негативні вихідні сигнали 93, 99, 101 допускових компараторів 87, 88, 91, 86, 89, 90 відповідно. На вхід логічного елемента "і" 106 подаються позитивні вихідні сигнали 92, 96, 100 і негативні вихідні сигнали 95, 99, 103 допускових компараторів 86, 88, 90, 87, 89, 91 відповідно. На вхід логічного елемента "і" 107 подаються позитивні вихідні сигнали 92, 94, 98 і негативні вихідні сигнали 97, 101, 103 допускових компараторів 86, 87, 89, 88, 90, 91 7058 відповідно. На вхід логічного елемента "і" 108 подаються позитивні вихідні сигнали 98, 100, 102 і негативні вихідні сигнали 93, 95, 97 допускових компараторів 89, 90, 91, 86, 87, 88 відповідно. Кожний логічний елемент "і" формує певний вихідний сигнал блоку ідентифікації відмов: елемент 104 - сигнал 43 (48, 53), елемент 105 - сигнал 44 (49, 54), елемент 106 - сигнал 45 (50, 55), елемент 107 - сигнал 46 (51, 56), елемент 108 - сигнал 47 (52, 57). Функціонально надлишковий інерціальний вимірювальний блок працює наступним чином. Розташування ортів є (і=1, 2, З, А), а отже, і осей чутливості вимірювачів 1, 2, 3, 4 в базовій ортогональній системі координат OXYZ незмінно та відомо: (1) e 3=(a3Xa3Ya3z)T; 10 а Рз Р _ aiZ а a a2z a Р2 = a a 1Х 2Х а ЗХ a3Z 2X 3X a 1Y 2Y 2Y 4_ "Р ' а ay Х р З = азх Р 4_ а a PY PZ. 2 Z >X PY PZ a z Їх Py (4) (5) (6) 4Х ах ay (7) a2z 2 а2Х Р4 Pz За допомогою функціонально надлишкового вимірювального блоку необхідно визначити проекції векторного параметру Р на осі системи координат OXYZ: р T T [PX123PY123PZ1J =M1^3[PIP2P3] ; де а,х , а,у , a,z - направляючі косинуси, що визначають розташування ортів є (і=1, 2, 3, 4) у системі координат OXYZ. Вихідні сигнали вимірювачів 1, 2, 3, 4 залежать від величини та напрямку вектора Р, від параметрів орієнтації орта є в системі OXYZ, кута раствору конуса 5 та відстані вимірювачів від точки О. Векторний параметр Р, що вимірюється, може бути представлений так: Т Р = [ Рх Р у Р 2 ] , (2) де Рх, PY, PZ - проекції Р на осі системи координат OXYZ (компоненти вектора Р). Показання вимірювачів 1, 2, 3, 4 пропорційні T для визначення проекцій векторного параметру Р на осі системи координат OXYZ (табл.1). Таблиця 1 Варіант 1 2 3 4 Номери вимірювачів 1,2,3 2,3,4 1,3,4 1,2,4 Для кожного з вказаних варіантів сукупностей вимірювачів відповідно до співвідношення (3) можна записати: О ) ; 01) £.4 І £— —Г &* £А — де зворотні матриці направляючих косинусів визначаються наступним чином: -1 М-1 123 ; (12) Э2Х a3Z М'234 -1 а2х ; (із) a3z Э4Х проекціям Pj (j=1, 2, 3, 4) вектора Р на осі чутливості вимірювачів або на орти є (і=1, 2, 3, 4): a а Р1 1Z 1Х а-іу Px а a a Р2 2Х 2Y 2Z (3) а a Рз ЗХ a 3Y 3Z PZ а a 4Х a 4Y 4Z Р4 У функціонально надлишковому блоці, що розглядається, використовуються триади вимірювачів (в) T -1 М ; (14) 134 = a4x -1 M: 124 ах a 2X ау -1 • (15) Отже, при визначенні проекцій вектора параметра Р, що вимірюється, на осі системи координат OXYZ згідно з співвідношеннями (8)-(11) результати співпадають у межах прийнятого допуску, який визначається точнісними характеристиками вимірювачів та обчислювальних засобів. Для реалізації співвідношень (8)-(11) служать обчислювальні пристрої 6, 7, 8, 9, кожний з яких споживає інформацію, що формується відповідними трійками вимірювачів 1,2,3, 4. Вихідні сигнали обчислювальних пристроїв представляють собою проекції параметру Р, що вимірюється, на осі системи координат OXYZ: 16, 20, 24 - Рхігз, Руігз, PZ123; 17, 21, 25 - РХ234, PY234, PZ234! 18, 22, 26 РХ134, PY134, PZ134! 1 9 , 2 3 , 2 7 - Р Х 124, PY124, PZ124. У 11 7058 12 тому випадку, коли відмови будь-якого вимірювача виявляється у відхиленні його вихідного сигналу Pj 0=1, 2, 3, 4) від істинного значення або у викривнемає, і результати обчислення відповідних проеленні відповідного вхідного сигналу трьох з чотикцій (компонентів) параметра Р співпадають у рьох обчислювальних пристроїв 6-9. При цьому межах прийнятого допуску, вихідні сигнали обчистільки один обчислювальний пристрій отримує на лювальних пристроїв подаються на блоки оцінки вході істинну інформацію від трьох справних вимікомпонентів параметра, який вимірюється: сигнарювачів та формує невикривлену вихідну інфорли 16, 17, 18, 19 - на блок 13; сигнали 20, 21, 22, мацію про три компоненти Рх, PY, PZ, параметру 23 - на блок 14; сигнали 24, 25, 26, 27 - на блок 15. За допомогою блоків 13, 14, 15 шляхом обробки Р, що вимірюється. надлишкової інформації можливо реалізувати Використовуючи співвідношення (8)-(11), можодин з методів підвищення точності визначення на розглянути наступні ситуації. 1. Відмова вимірювача 1: проекцій вектора Р: вибір еталонних сигналів, визначення величин медіан пар параметрів виміТ ІРхі 23 PYI 23 Ргл 23І = рювань, визначення кількох центральних членів варіаційних рядів, отриманих при мажоритарних [р2 Р 3 р ] Т : перетвореннях обчислених компонентів вимірюва(19) ного параметру. Т [РХ134 FV134 Р*134І = М^ Для визначення присутності або відсутності відмови одного з вимірювачів 1, 2, 3, 4 служать РХ124 PY124 PZ124] 1 = М ' ^ + ДР, Р 2 Р 4 ] Т . блоки ідентифікації відмов 10, 11, 12, кожний з яких обробляє інформацію по одному компоненту 2. Відмова вимірювача 2: параметра Р, що вимірюється. Принцип роботи кожного блоку ідентифікації відмов базується на [РХ123 PY123 PZ123І Т = M T23 використанні порівняння пар сигналів, що формуються за допомогою обчислювальних пристроїв 6[ р Х234 PY234 PZ234JT = М (20) 9. Порівняння сигналів здійснюється за допомогою [РХ134 PY134 PZ1341T = допускових компараторів 86-91, настроєних на певну величину неузгодженості друг відносно [pX14pY14pZ14]T=M-][P1P P Р 4 ] Т друга вхідних сигналів 74-75, 76-77, 78-79, 80-81, 82-83, 84-85. Величина обирається у межах випадкового відхилення вихідного сигналу по кожно3. Відмова вимірювача 3: му компоненту параметра Р, обумовленого погрішностями вимірювачів та обчислювальних пристроїв при відсутності відмов вимірювачів. 34Р р з р з р 4 І т ; (21) У разі збігу вхідних сигналів допускового ком[ p X134 p Y134 p Z134] T = М ^ паратора у межах величини на його виході формується позитивний сигнал (виходи 92, 94, 96, 98, [ p X124 p Y124 p Z124] T = ^ 2 100, 102). В тому випадку, якщо неузгодженість вхідних сигналів допускового компаратора перевищує величину , на його виході формується не4. Відмова вимірювача 4: гативний сигнал (виходи 93, 95, 97, 99, 101, 103). р Т [ Х123 PY123 PZ123І = Т23 Із співвідношень (8)-(11) можна зробити висновок, що при відсутності відмов вимірювачів 1-4 [РХ234 РУ234 PZ234J1 = ^ 3 4 ^ 2 Р 3 Р 4 Р 4 ] Т ; значення однойменних компонентів параметра, (22) який вимірюється, що були сформовані за допомор Т [р1 р 3 р 4 + А р 4 ] Т ; [ Х134 PY134 PZ134І = гою обчислювальних пристроїв 6-9, співпадають у р p T межах величини : [ Х124 PY124 Z 1 2 4 l = Р і Р 2Р 4 + А р 4 ] Т Т |РХ123 - Р Х234І ^ є; |РХ234 -РХ134І ^ S |РХ123-РХ134І^Є; |РХ234-РХ124І^Є; (16) |РХ123 - р Х124І ^ є'- |рХ134 - РХ124І ^ £'> |РУ123 - р 234І ^ є; |PY234 - Р 134І ^ є ! |РУ123 - р124| ^ є; |РУ134 - р 1 2 4 ^ є ; |pZ123 - р 2 3 4 | * є.' 1^234 - p Z134| * є; | p Z123- p Z134|^e; 1 ^ 2 3 4 - ^ 1 2 4 ^ є ; В цих співвідношеннях РО=1, 2, 3, 4) - варіація вихідного сигналу j-ro вимірювача, що відмовив, яка викликає відхилення від істинного значення компонентів параметра Р, що обчислюються, на величину, яка перевищує . Із співвідношень (19)-(22) випливає, що: 1) при відмові вимірювача 1 |pS123 - p S234| > є; |PS234 - PS134І > S 08) При цьому на виходах усіх допускових компараторів 86-91 сформовані позитивні сигнали. Відмова одного з чотирьох вимірювачів 1-4 |pSi23-pS134He; | p S234- p S124|>&; (23) (pS123 - pS124І ^ є; |pS134 - PS124І ^ Є 2) при відмові вимірювача 2 13 7058 14 |Psi 23 - PS234I > є; |Ps234 - Psi 34І ^ £ ; |PS123- P S134|>£; |PS234 - P S 1 2 4 ^ (24) |PS123 - PS124І ^ S |PS134 - PS124І > 5 3) при відмові вимірювача З e; |PS123 - PS124| > є; |PS134 - PS124І ^ 5 у цих співвідношеннях індекс S послідовно приймає позначення осей X, Y, Z базової системи координат. Отже, в залежності від номеру вимірювача, що відмовив, на виходах допускових компараторів формується певна сукупність позитивних та негативних сигналів. Проілюструємо це за допомогою таблиці 2. |pS123 - p S234| ^ S |PS234 - PS134І ^ S (25) p | S123-PS124|>e; |Psi34 4) при відмові вимірювача 4 Таблиця 2 Номер вимірювача, що відмовив 1 2 3 4 усі вимірювачі справні 86 93 (-) 92 (+) 92 (+) 93 (-) 92 (+) З цієї таблиці випливає, що кожному варіанту при відмові одного вимірювача відповідає певна комбінація позитивних та негативних вихідних сигналів допускових компараторів. Для виділення відповідного варіанта і формування вихідних сигналів 43-47, 48-52, 53-57 блоків ідентифікації відмов використовуються логічні елементи "і" 104-108. На вхід кожного з них подається сукупність шести сигналів з допускових компараторів 86-91 (див. таблицю 2). Наприклад, при Вихідний сигнал допускового компаратора 87 88 89 90 91 94 96 99 101 102 (-) (-) (+) (+) (+) 95 96 99 100 103 (-) (+) (-) (-) (+) 97 94 98 101 103 (-) (+) (-) (+) (-) 97 98 100 102 95 (-) (+) (-) (+) (+) 94 96 98 100 102 (+) (+) (+) (+) (+) всіх справних вимірювачах формується сукупність сигналів 92, 94, 96, 98, 100, 102; при першому несправному вимірювачі - 93, 94, 96, 99, 101, 102 і так далі. Оскільки комбінації (сполучення) сигналів різні для п'яти випадків, що розглядаються, в кожному з них один логічний елемент "і" формує вихідний сигнал блока ідентифікації відмов (див. таблицю 3). Чотири інші елементи "і" вихідних сигналів не формують. Таблиця З Номер вимірювача, що відмовив Логічний елемент "і", що формує вихідний сигнал Вихідний сигнал блока ідентифікації відмов Три блоки 10, 11, 12 ідентифікації відмов по кожному компоненту параметру Р, що вимірюється, відповідно працюють однаково. Для того, щоб подати істинний вихідний сигнал одного з чотирьох обчислювальних пристроїв 6, 7, 8, 9 на вихід вимірювача в цілому по кожному компоненту параметру Р, що вимірюється, служать ідентичні системи керуючих ключів 28-32, 33-37, 38-42 і логічні елементи "або" 58, 59, 60. Принцип дії кожного ключа 28-42 ґрунтується на тому, що на його вихід подається сигнал з інформаційного входу у тому випадку, коли є поданий сигнал на керуючий вхід. Якщо керуючий вхідний сигнал нульовий, вихідний сигнал ключа є відсутній. Керуючі вхідні сигнали 43-47 ключів 2832 формуються блоком ідентифікації відмов 10, 1 2 3 4 Усі вимірювачі справні 107 106 104 105 108 44 46 47 45 43 (49,54) (50,55) (51,56) (52,57) (48,53) керуючі вхідні сигнали 48-52 ключів 33-37 формуються блоком ідентифікації відмов 11, керуючі вхідні сигнали 53-57 ключів 38-42 формуються блоком ідентифікації відмов 12. Сигнали 16, 17, 18, 19 на інформаційних входах ключів 28-32 формуються за допомогою блока оцінки першого компонента параметра, який вимірюється, 13 та обчислювальних пристроїв 6-9. Сигнали 20, 21, 22, 23 на інформаційних входах ключів 33-37 формуються за допомогою блока оцінки другого компонента параметра, який вимірюється, 14 та обчислювальних пристроїв 6-9. Сигнали 24, 25, 26, 27 на інформаційних входах ключів 38-42 формуються за допомогою блока оцінки третього компонента параметра, який вимірюється, 15 та обчислювальних пристроїв 6-9. Сигнали на інформаційних входах всіх ключів (28-42) визначають величину відповідного компо 15 нента параметра Р, що вимірюється. Ті ж самі сигнали подаються на вихід тих ключів, які відкриті сигналом на керуючім вході. Отже, за допомогою систем ключів 28-32, 33-37, 38-42 здійснюється формування вихідної інформації про величини компонентів параметру Р , що вимірюється, отриманої в тому обчислювальному пристрої з чотирьох (6-9), на який видають сигнали тільки справні вимірювачі. При відсутності вимірювача, що від 7058 16 мовив, вихідна інформація обчислювальних пристроїв 6, 7, 8, 9 використовується для підвищення точності вимірювання, обробляється з використанням блоків 13, 14, 15 оцінки компонентів параметра, який вимірюється, та за допомогою ключів 28, 33, 38 подається на вихід системи. Взаємозв'язок елементів обробки інформації можна представити за допомогою таблиці 4. Таблиця 4 1 2 3 4 Всі вимірювачі справні Вихідний сигнал блока ідентифікації відмов 10 (управляю44 чий сигнал) 45 46 47 43 17 18 19 16 Номер відкритого ключа 29 Вихідний сигнал блока ідентифікації відмов 11 (управляю49 чий сигнал) ЗО 31 32 50 51 52 21 22 23 20 Номер відкритого ключа 34 Вихідний сигнал блока ідентифікації відмов 12 (управляю54 чий сигнал) 35 36 37 55 56 57 26 27 24 Номер вимірювача, що відмовив Канал Рх Канал PY Канал Pz Інформаційний сигнал Інформаційний сигнал Інформаційний сигнал 25 39 40 41 42 Номер відкритого ключа Номер обчислювального пристрою, інформація якого поступає на 7 8 9 6 вихід інерціального блоку Номера вимірювачів, що використовуються для формування вихід2,3,4 1,3,4 1,2,4 1,2,3 ної інформації Для безпосереднього формування вихідних сигналів по кожному компоненту параметру Р, що вимірюється, служать логічні елементи "або" 58, 59, 60. Зі входами кожного з них з'єднані виходи всіх ключів, що входять у відповідний канал. На виході елементів 58, 59, 60 формуються сигнали 61, 62, 63, які видаються одним з ключів кожної системи. Сигнали 61, 62, 63 містять інформацію про компоненти Рх, PY, PZ ВІДПОВІДНО параметру Р, що вимірюється. Логічні елементи "і" 64, 65, 66, 67 та система індикації і резервування 72 служать для формування сукупності сигналів 73, які при необхідності можуть бути використані для: - індикації номера вимірювача, що відмовив; - виключення приладу, що відмовив, з структури вимірювального блоку; - заміни вимірювача, що відмовив, іншим при наявності резерву; - включення системи корекції вимірювача, що відмовив, при відповідних видах відмов. На вхід елементів "або" 64, 65, 66, 67 подаються сигнали про відмови першого, другого, тре Вихідний блоку 13 28 48 Вихідний блоку 14 33 53 Вихідний блоку 15 38 6,7,8,9 1,2,3,4 тього, четвертого вимірювачів відповідно, що формуються кожним блоком ідентифікації відмов 10, 11, 12 по кожному компоненту параметру Р, що вимірюється. Вихідні сигнали 68, 69, 70, 71 елементів 64, 65, 66, 67 з'являються, якщо хоча б один блок ідентифікації відмов формує вихідний сигнал про відмову одного з вимірювачів. При відсутності вимірювача, що відмовив, вхідних сигналів елементів 64, 65, 66, 67 немає. Таким чином, запропонований функціонально надлишковий інерціальний вимірювальний блок набуває наступних позитивних якостей: - можливість ідентифікації вимірювача, що відмовив, при збереженні працездатності вимірювального блоку; - можливість виключення показань вимірювача, що відмовив, з процесу обробки первинної інформації та обчислення компонентів параметру Р; - можливість заміни вимірювача, що відмовив, резервним. ІЦф 9901 19 7058 Фіг. 2 21 7058 1в 17 18 (20,24) (21,251 (22,26) 22 19 (23 27) — 43О - ЦО -45°- - 4 6 ^ (48,53) (48,54) (50,55) {51 56) (52 57) ФІГ. З Комп'ютерна верстка В Мацело Підписне Тираж 28 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFunctionally redundant measuring inertial system
Автори англійськоюHordin Oleksandr Hryhorovych
Назва патенту російськоюФункционально избыточная измерительная инерциальная система
Автори російськоюГордин Александр Григорьевич
МПК / Мітки
МПК: G01C 21/00
Мітки: інерціальній, функціонально-надлишковий, блок, вимірювальний
Код посилання
<a href="https://ua.patents.su/12-7058-funkcionalno-nadlishkovijj-inercialnijj-vimiryuvalnijj-blok.html" target="_blank" rel="follow" title="База патентів України">Функціонально-надлишковий інерціальний вимірювальний блок</a>
Вимірювальний блок для навігаційного пристрою
Номер патенту: 1674
Опубліковано: 17.03.2003
Автори: Савенко Юрій Миколайович, Захаренко Анатолій Олександрович, Токарев Олег Дмитрович, Чаус Леонід Михайлович, Карпачов Юрій Андрійович
МПК: G01C 21/04
Мітки: блок, пристрою, навігаційного, вимірювальний
Формула / Реферат:
1. Вимірювальний блок для навігаційного пристрою, який містить корпус, дворамковий кардановий підвіс, маятник, з’єднаний із точкою перетинання його осей за допомогою нижнього вертикального стержня, і два феррозонди, який відрізняється тим, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим підвісом, центр якої з’єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому...
Вимірювальний перетворювач електрохімічного потенціалу
Номер патенту: 58090
Опубліковано: 15.07.2003
Автори: Готра Зенон Юрійович, Темпль-Вуайє П'єр, Гуменюк Ірина Анатоліївна, Голяка Роман Любомирович
МПК: G01N 27/26
Мітки: перетворювач, потенціалу, електрохімічного, вимірювальний
Формула / Реферат:
Вимірювальний перетворювач електрохімічного потенціалу, який містить іонно-селективний польовий транзистор, операційний підсилювач та резистор формування напруги, який відрізняється тим, що додатково містить перший резистор формування струму, другий резистор формування струму та джерело напруги, при цьому перший вивід джерела напруги заземлений, а другий вивід з'єднаний з другим виводом першого резистора формування струму та з другим виводом...
Вимірювальний перетворювач сигналів змінної напруги або струму
Номер патенту: 71856
Опубліковано: 15.12.2004
Автор: Ванько Володимир Михайлович
МПК: G01R 19/00
Мітки: струму, перетворювач, вимірювальний, змінної, сигналів, напруги
Формула / Реферат:
Вимірювальний перетворювач сигналів змінної напруги або струму, що містить два каліброваних резистори, трансформатор струму, операційний підсилювач, перший ключ, перший вивід першого каліброваного резистора є першим входом даного пристрою та з'єднаний з першим виводом першого ключа, другий вивід якого підключений до другого виводу першого каліброваного резистора та до початку первинної обмотки трансформатора струму, кінець якої є другим...
Вимірювальний комплекс
Номер патенту: 52003
Опубліковано: 16.12.2002
Автори: Кротевич Віталій Володимирович, Лешак Роман Михайлович, Келиман Роман Михайлович
МПК: G01F 3/00
Мітки: вимірювальний, комплекс
Формула / Реферат:
1. Вимірювальний комплекс, який складається з лічильника газу з обертовим робочим органом, високочастотного імпульсного датчика об’єму газу, відлікового пристрою з низькочастотним імпульсним датчиком об’єму газу і коректора об’єму газу з відліковим пристроєм, зв’язаним з лічильником каналами тиску, температури та каналом низькочастотних імпульсів об’єму газу, який відрізняється тим, що коректор об’єму газу зв’язаний лічильником каналом...
Цифровий вимірювальний прилад
Номер патенту: 37578
Опубліковано: 15.05.2001
Автори: Наконечний Ростислав Адріанович, Наконечний Адріан Йосифович, Дудикевич Валерій Богданович
МПК: G01R 19/02, G01R 21/06
Мітки: прилад, вимірювальний, цифровий
Формула / Реферат:
Цифровий вимірювальний прилад, що містить пристрій індикації, обчислювальний пристрій, аналого-цифровий перетворювач, вхід якого з'єднаний з виходом аналогового перетворювача, вхід якого є входом приладу, який відрізняється тим, що в нього введено додатково інверсний дискретний малохвильовий перетворювач, пристрій порогування і дискретний малохвильовий перетворювач, вхід і вихід якого з'єднані відповідно з виходом аналого-цифрового...
Попередній патент: Стереорегулятор
Наступний патент: Процес оцінки ефективності терапії статинами у хворих на ішемічну хворобу серця (іхс)
Випадковий патент: Фармацевтична композиція на основі мікронізованого прогестерону, спосіб її одержання і застосування