Інерціальний вимірювальний блок
Номер патенту: 46952
Опубліковано: 11.01.2010
Автори: Гордін Олександр Григорович, Тамбова Ольга Сергіївна
Формула / Реферат
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості, який відрізняється тим, що в нього введено три гіроскопічних інтегратори лінійних прискорень з міжрамочною корекцією, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, при цьому осі чутливості гіроскопічних інтеграторів лінійних прискорень взаємоортогональні та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, а осі чутливості відповідних пар однокомпонентних гіроскопічних датчиків кутової швидкості та гіроскопічних інтеграторів лінійних прискорень паралельні, крім того, виходи однокомпонентних гіроскопічних датчиків кутової швидкості та гіроскопічних інтеграторів лінійних прискорень з'єднані з обчислювальним пристроєм таким чином, що вхідні сигнали обчислювального пристрою є вихідними сигналами датчиків кутів однокомпонентних гіроскопічних датчиків кутової швидкості та датчиків кутів повороту зовнішньої рами гіроскопічних інтеграторів лінійних прискорень.
Текст
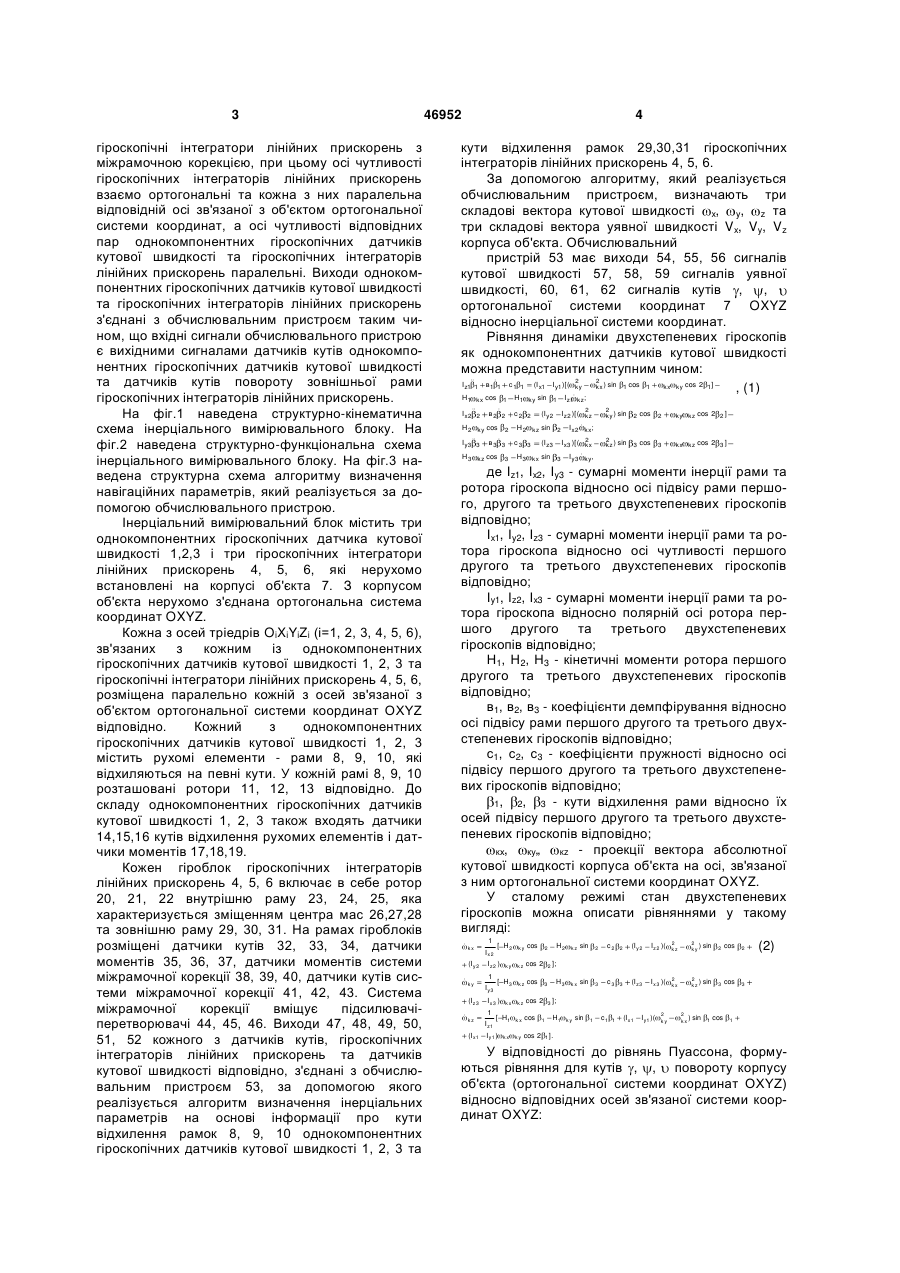
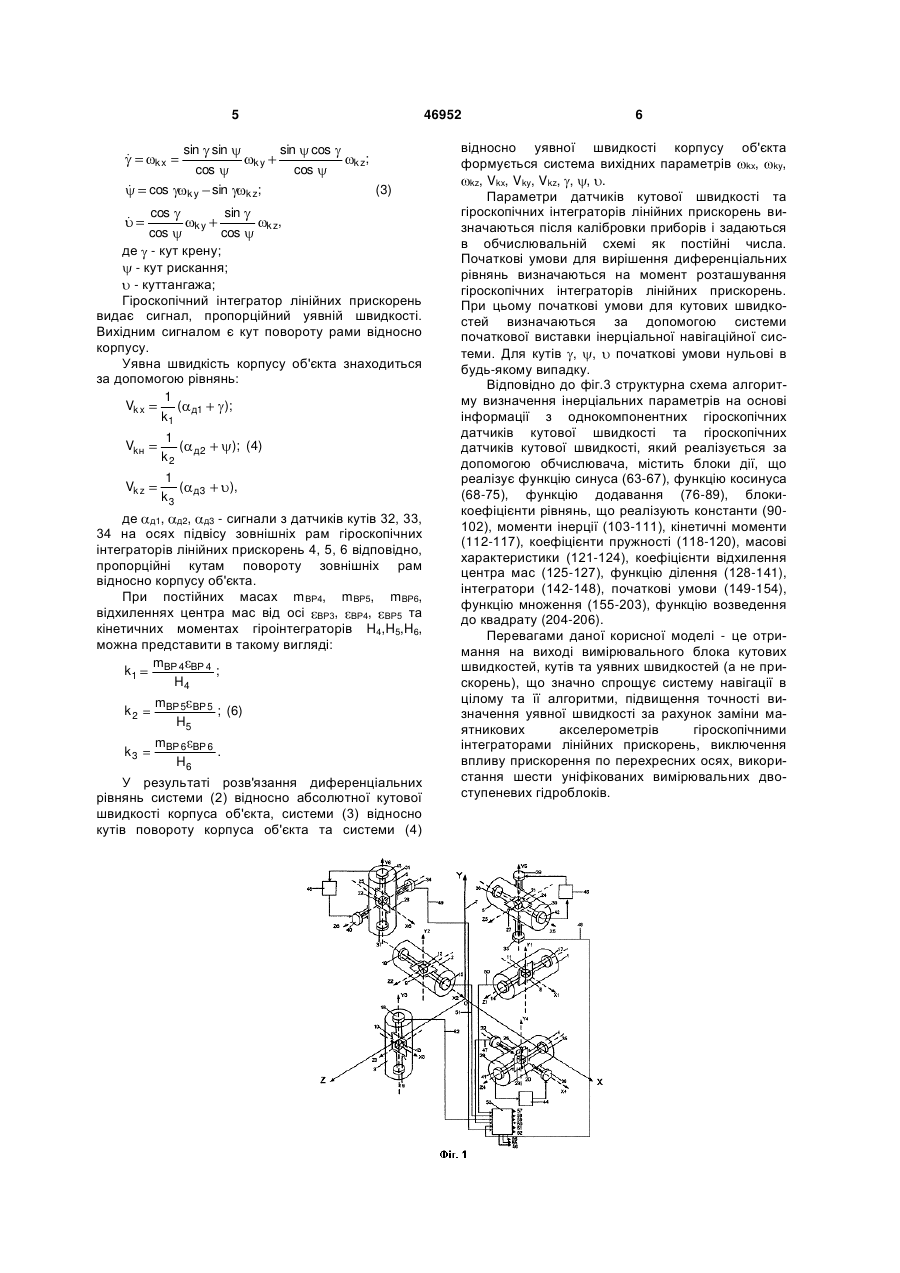
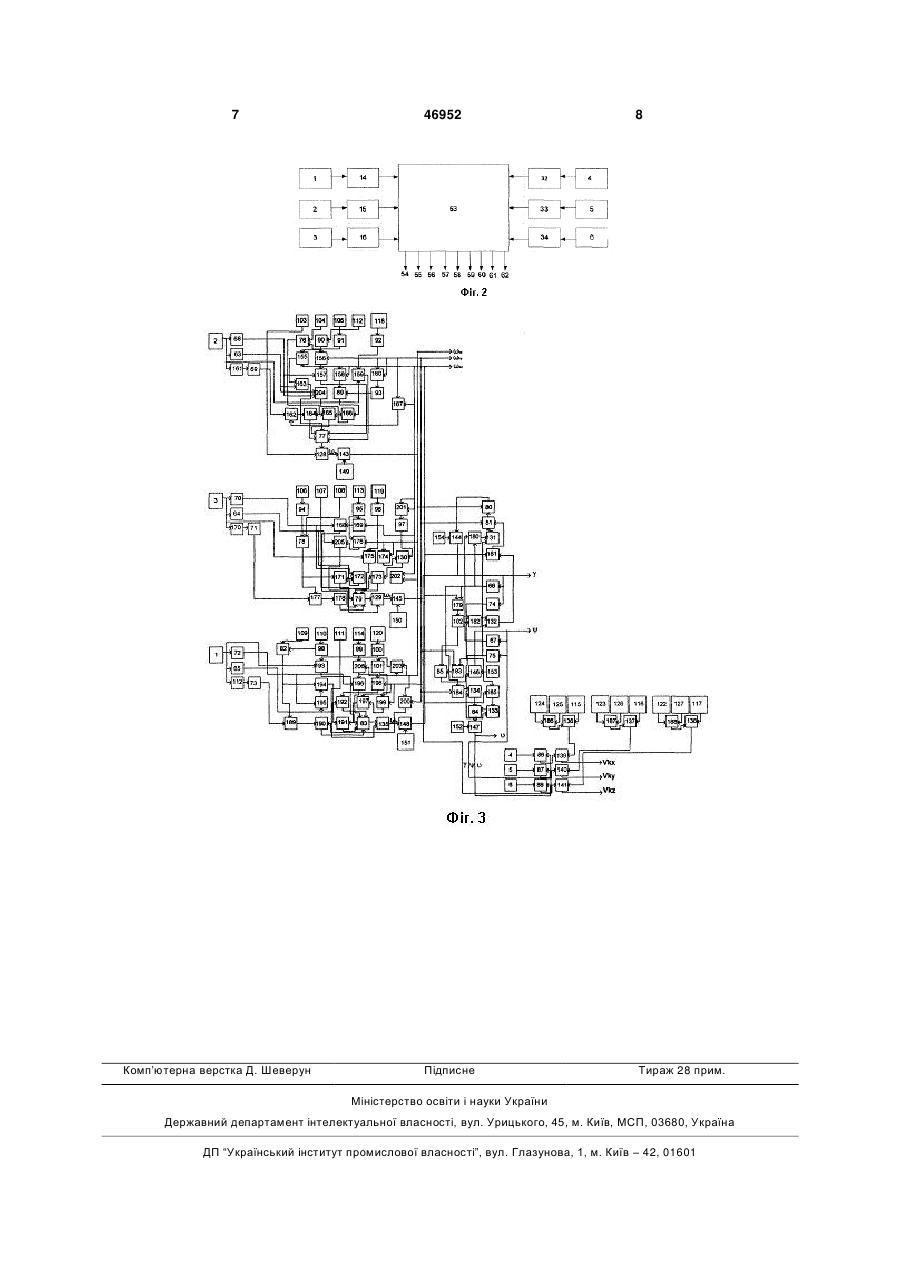
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості, який відрізняється тим, що в нього введено три гіроскопічних інтегратори лінійних прискорень з міжрамочною корекцією, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, при цьому осі чут 3 гіроскопічні інтегратори лінійних прискорень з міжрамочною корекцією, при цьому осі чутливості гіроскопічних інтеграторів лінійних прискорень взаємо ортогональні та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, а осі чутливості відповідних пар однокомпонентних гіроскопічних датчиків кутової швидкості та гіроскопічних інтеграторів лінійних прискорень паралельні. Виходи однокомпонентних гіроскопічних датчиків кутової швидкості та гіроскопічних інтеграторів лінійних прискорень з'єднані з обчислювальним пристроєм таким чином, що вхідні сигнали обчислювального пристрою є вихідними сигналами датчиків кутів однокомпонентних гіроскопічних датчиків кутової швидкості та датчиків кутів повороту зовнішньої рами гіроскопічних інтеграторів лінійних прискорень. На фіг.1 наведена структурно-кінематична схема інерціального вимірювального блоку. На фіг.2 наведена структурно-функціональна схема інерціального вимірювального блоку. На фіг.3 наведена структурна схема алгоритму визначення навігаційних параметрів, який реалізується за допомогою обчислювального пристрою. Інерціальний вимірювальний блок містить три однокомпонентних гіроскопічних датчика кутової швидкості 1,2,3 і три гіроскопічних інтегратори лінійних прискорень 4, 5, 6, які нерухомо встановлені на корпусі об'єкта 7. З корпусом об'єкта нерухомо з'єднана ортогональна система координат OXYZ. Кожна з осей тріедрів OiXiYiZi (і=1, 2, 3, 4, 5, 6), зв'язаних з кожним із однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 та гіроскопічні інтегратори лінійних прискорень 4, 5, 6, розміщена паралельно кожній з осей зв'язаної з об'єктом ортогональної системи координат OXYZ відповідно. Кожний з однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 містить рухомі елементи - рами 8, 9, 10, які відхиляються на певні кути. У кожній рамі 8, 9, 10 розташовані ротори 11, 12, 13 відповідно. До складу однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 також входять датчики 14,15,16 кутів відхилення рухомих елементів і датчики моментів 17,18,19. Кожен гіроблок гіроскопічних інтеграторів лінійних прискорень 4, 5, 6 включає в себе ротор 20, 21, 22 внутрішню раму 23, 24, 25, яка характеризується зміщенням центра мас 26,27,28 та зовнішню раму 29, 30, 31. На рамах гіроблоків розміщені датчики кутів 32, 33, 34, датчики моментів 35, 36, 37, датчики моментів системи міжрамочної корекції 38, 39, 40, датчики кутів системи міжрамочної корекції 41, 42, 43. Система міжрамочної корекції вміщує підсилювачіперетворювачі 44, 45, 46. Виходи 47, 48, 49, 50, 51, 52 кожного з датчиків кутів, гіроскопічних інтеграторів лінійних прискорень та датчиків кутової швидкості відповідно, з'єднані з обчислювальним пристроєм 53, за допомогою якого реалізується алгоритм визначення інерціальних параметрів на основі інформації про кути відхилення рамок 8, 9, 10 однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 та 46952 4 кути відхилення рамок 29,30,31 гіроскопічних інтеграторів лінійних прискорень 4, 5, 6. За допомогою алгоритму, який реалізується обчислювальним пристроєм, визначають три складові вектора кутової швидкості x, y, z та три складові вектора уявної швидкості Vx, Vy, Vz корпуса об'єкта. Обчислювальний пристрій 53 має виходи 54, 55, 56 сигналів кутової швидкості 57, 58, 59 сигналів уявної швидкості, 60, 61, 62 сигналів кутів , , ортогональної системи координат 7 OXYZ відносно інерціальної системи координат. Рівняння динаміки двухстепеневих гіроскопів як однокомпонентних датчиків кутової швидкості можна представити наступним чином: 2 2 Iz11 в1 1 с 1 1 (I x1 I y1 )[( ky kx ) sin 1 cos 1 kx ky cos 2 1 ] , (1) 1 H1 ky I x 2 2 H1 в2 2 с2 2 H2 cos kx ky cos 2 I y3 3 в3 3 H3 cos kz H2 с3 3 sin kz kx 2 kz Iz2 )[( sin sin 2 ky ) sin 2 cos 2 ky kz cos 2 2] 2 kz ) sin 3 cos 3 kx kz cos 2 3] I x 2 kx; 2 (Iz3 3 H3 Izl kz; 1 (I y 2 2 kx I x3 )[( 3 I y3 ky, де Iz1, Ix2, Iy3 - сумарні моменти інерції рами та ротора гіроскопа відносно осі підвісу рами першого, другого та третього двухстепеневих гіроскопів відповідно; Ix1, Iy2, Iz3 - сумарні моменти інерції рами та ротора гіроскопа відносно осі чутливості першого другого та третього двухстепеневих гіроскопів відповідно; Iy1, Iz2, Ix3 - сумарні моменти інерції рами та ротора гіроскопа відносно полярній осі ротора першого другого та третього двухстепеневих гіроскопів відповідно; Н1, Н2, Н3 - кінетичні моменти ротора першого другого та третього двухстепеневих гіроскопів відповідно; в1, в2, в3 - коефіцієнти демпфірування відносно осі підвісу рами першого другого та третього двухстепеневих гіроскопів відповідно; с1, с2, с3 - коефіцієнти пружності відносно осі підвісу першого другого та третього двухстепеневих гіроскопів відповідно; 1, 2, 3 - кути відхилення рами відносно їх осей підвісу першого другого та третього двухстепеневих гіроскопів відповідно; кх, ку„ кz - проекції вектора абсолютної кутової швидкості корпуса об'єкта на осі, зв'язаної з ним ортогональної системи координат OXYZ. У сталому режимі стан двухстепеневих гіроскопів можна описати рівняннями у такому вигляді: 1 2 2 kx [ H 2 k y cos 2 H 2 k z sin 2 c 2 2 (I y 2 I z 2 )( k z (2) k y ) sin 2 cos 2 Ix2 (I y 2 ky (I z3 kz I z2 ) 1 I y3 ky kz [ H3 I x3 ) kx 1 [ H1 I z1 (I x1 I y1 ) cos 2 k z cos 2 ]; kx kx ky cos cos 2 H3 3 k z cos 2 1 kx sin 3 c3 3 (I z3 I x 3 )( 2 kx 2 k z ) sin 3 cos 3 3 ]; H1 ky sin 1 c1 1 (I x1 I y1 )( 2 ky 2 k x ) sin 1 cos 1 1 ]. У відповідності до рівнянь Пуассона, формуються рівняння для кутів , , повороту корпусу об'єкта (ортогональної системи координат OXYZ) відносно відповідних осей зв'язаної системи координат OXYZ: 5 kx cos sin sin cos ky sin 46952 ky kz; sin cos cos kz; (3) cos sin ky kz, cos cos де - кут крену; - кут рискання; - куттангажа; Гіроскопічний інтегратор лінійних прискорень видає сигнал, пропорційний уявній швидкості. Вихідним сигналом є кут повороту рами відносно корпусу. Уявна швидкість корпусу об'єкта знаходиться за допомогою рівнянь: 1 Vk x ( д1 ); k1 Vkн 1 ( k2 д2 ); (4) Vk z 1 ( k3 д3 ), де д1, д2, д3 - сигнали з датчиків кутів 32, 33, 34 на осях підвісу зовнішніх рам гіроскопічних інтеграторів лінійних прискорень 4, 5, 6 відповідно, пропорційні кутам повороту зовнішніх рам відносно корпусу об'єкта. При постійних масах m ВР4, mВР5, mВР6, відхиленнях центра мас від осі ВР3, ВР4, ВР5 та кінетичних моментах гіроінтеграторів H4,H5,H6, можна представити в такому вигляді: mВР 4 ВР 4 k1 ; H4 k2 mВР 5 ВР 5 ; (6) H5 k3 mВР 6 ВР 6 . H6 У результаті розв'язання диференціальних рівнянь системи (2) відносно абсолютної кутової швидкості корпуса об'єкта, системи (3) відносно кутів повороту корпуса об'єкта та системи (4) 6 відносно уявної швидкості корпусу об'єкта формується система вихідних параметрів kx, ky, kz, Vkx, Vky, Vkz, , , . Параметри датчиків кутової швидкості та гіроскопічних інтеграторів лінійних прискорень визначаються після калібровки приборів і задаються в обчислювальній схемі як постійні числа. Початкові умови для вирішення диференціальних рівнянь визначаються на момент розташування гіроскопічних інтеграторів лінійних прискорень. При цьому початкові умови для кутових швидкостей визначаються за допомогою системи початкової виставки інерціальної навігаційної системи. Для кутів , , початкові умови нульові в будь-якому випадку. Відповідно до фіг.3 структурна схема алгоритму визначення інерціальних параметрів на основі інформації з однокомпонентних гіроскопічних датчиків кутової швидкості та гіроскопічних датчиків кутової швидкості, який реалізується за допомогою обчислювача, містить блоки дії, що реалізує функцію синуса (63-67), функцію косинуса (68-75), функцію додавання (76-89), блокикоефіцієнти рівнянь, що реалізують константи (90102), моменти інерції (103-111), кінетичні моменти (112-117), коефіцієнти пружності (118-120), масові характеристики (121-124), коефіцієнти відхилення центра мас (125-127), функцію ділення (128-141), інтегратори (142-148), початкові умови (149-154), функцію множення (155-203), функцію возведення до квадрату (204-206). Перевагами даної корисної моделі - це отримання на виході вимірювального блока кутових швидкостей, кутів та уявних швидкостей (а не прискорень), що значно спрощує систему навігації в цілому та її алгоритми, підвищення точності визначення уявної швидкості за рахунок заміни маятникових акселерометрів гіроскопічними інтеграторами лінійних прискорень, виключення впливу прискорення по перехресних осях, використання шести уніфікованих вимірювальних двоступеневих гідроблоків. 7 Комп’ютерна верстка Д. Шеверун 46952 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюИнерциальный измерительный блок
Автори англійськоюHordin Oleksandr Hryhorovych, Tambova Olha Serhiivna
Автори російськоюГордин Александр Григорьевич, Тамбова Ольга Сергеевна
МПК / Мітки
МПК: G01P 9/04
Мітки: вимірювальний, блок, інерціальній
Код посилання
<a href="https://ua.patents.su/4-46952-inercialnijj-vimiryuvalnijj-blok.html" target="_blank" rel="follow" title="База патентів України">Інерціальний вимірювальний блок</a>
Інерціальний вимірювальний блок
Номер патенту: 37386
Опубліковано: 25.11.2008
Автори: Шульгіна Людмила Андріївна, Гордін Олександр Григорович
МПК: G01P 9/00
Мітки: інерціальній, блок, вимірювальний
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, який відрізняється тим, що однокомпонентні гіроскопічні датчики кутової швидкості та однокомпонентні маятникові акселерометри зорієнтовані на об'єкті таким чином, що осі підвісу рухомих елементів...
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Шипітько Олена Олександрівна, Гордін Олександр Григорович, Калашникова Валерія Михайлівна
МПК: G01C 21/00
Мітки: функціонально-надлишковий, вимірювальний, блок, інерціальній
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Безплатформний інерціальний блок

Номер патенту: 35089
Опубліковано: 26.08.2008
Автори: Апоян Армен Генрікович, Златкін Олег Юрьєвич, Фірсов Сергій Миколайович, Субота Анатолій Максимович, Кулік Анатолій Степанович
МПК: G01C 21/00
Мітки: блок, інерціальній, безплатформний
Формула / Реферат:
Безплатформний інерціальний вимірювальний блок, що містить основу, на котрій розміщені гіроскопи, акселерометри, джерела струму, сервісні електронні блоки, який відрізняється тим, що відносно кожної ортогональної осі установлено по мікромеханічному акселерометру, осі чутливості яких співпадають з названими осями, і три мікромеханічні двовісні датчики кутової швидкості, осі чутливості першого з них паралельні осям Х і Y, другого - осям Y і Z,...
Вимірювальний блок для навігаційного пристрою
Номер патенту: 1674
Опубліковано: 17.03.2003
Автори: Захаренко Анатолій Олександрович, Токарев Олег Дмитрович, Савенко Юрій Миколайович, Карпачов Юрій Андрійович, Чаус Леонід Михайлович
МПК: G01C 21/04
Мітки: пристрою, вимірювальний, блок, навігаційного
Формула / Реферат:
1. Вимірювальний блок для навігаційного пристрою, який містить корпус, дворамковий кардановий підвіс, маятник, з’єднаний із точкою перетинання його осей за допомогою нижнього вертикального стержня, і два феррозонди, який відрізняється тим, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим підвісом, центр якої з’єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому...
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 45149
Опубліковано: 26.10.2009
Автори: Челядін В'ячеслав Олександрович, Кулік Анатолій Степанович, Бандура Іван Миколайович, Сухіцький Ігор Володимирович, Златкін Олег Юрійович, Фірсов Сергій Миколайович
МПК: G01C 21/00
Мітки: відмовостійкий, блок, швидкостей, датчиків, кутових
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі перших двох датчиків кутових швидкостей співпадають з двома осями ортогональної системи координат, який відрізняється тим, що додатково введені три датчики кутової швидкості, вісь третього датчика кутової швидкості направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого датчиків кутових швидкостей...
Попередній патент: Система живлення багатоциліндрового двигуна з впорскуванням бензину з відключенням групи циліндрів
Наступний патент: Фенестрований самофіксивний ендопротез для хірургічного лікування аневризм аорти
Випадковий патент: Фільтр для очищання газу