Інерціальний вимірювальний блок
Номер патенту: 37386
Опубліковано: 25.11.2008
Автори: Шульгіна Людмила Андріївна, Гордін Олександр Григорович
Формула / Реферат
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, який відрізняється тим, що однокомпонентні гіроскопічні датчики кутової швидкості та однокомпонентні маятникові акселерометри зорієнтовані на об'єкті таким чином, що осі підвісу рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості та однокомпонентних маятникових акселерометрів взаємно ортогональні, та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів однокомпонентних маятникових акселерометрів паралельні відповідним осям підвісу рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості, виходи всіх шести вимірювачів кінематичних параметрів з'єднані з обчислювальним пристроєм.
Текст
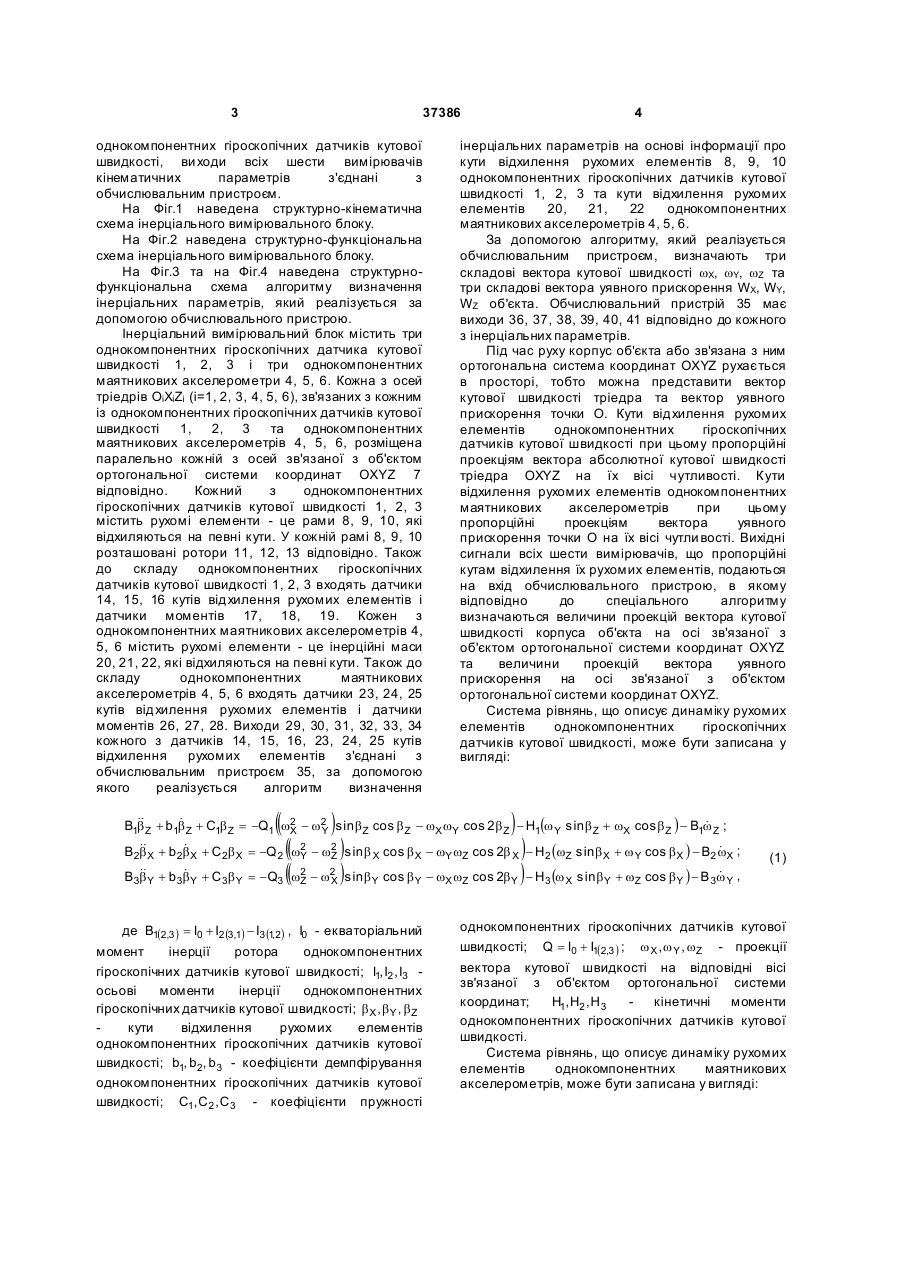
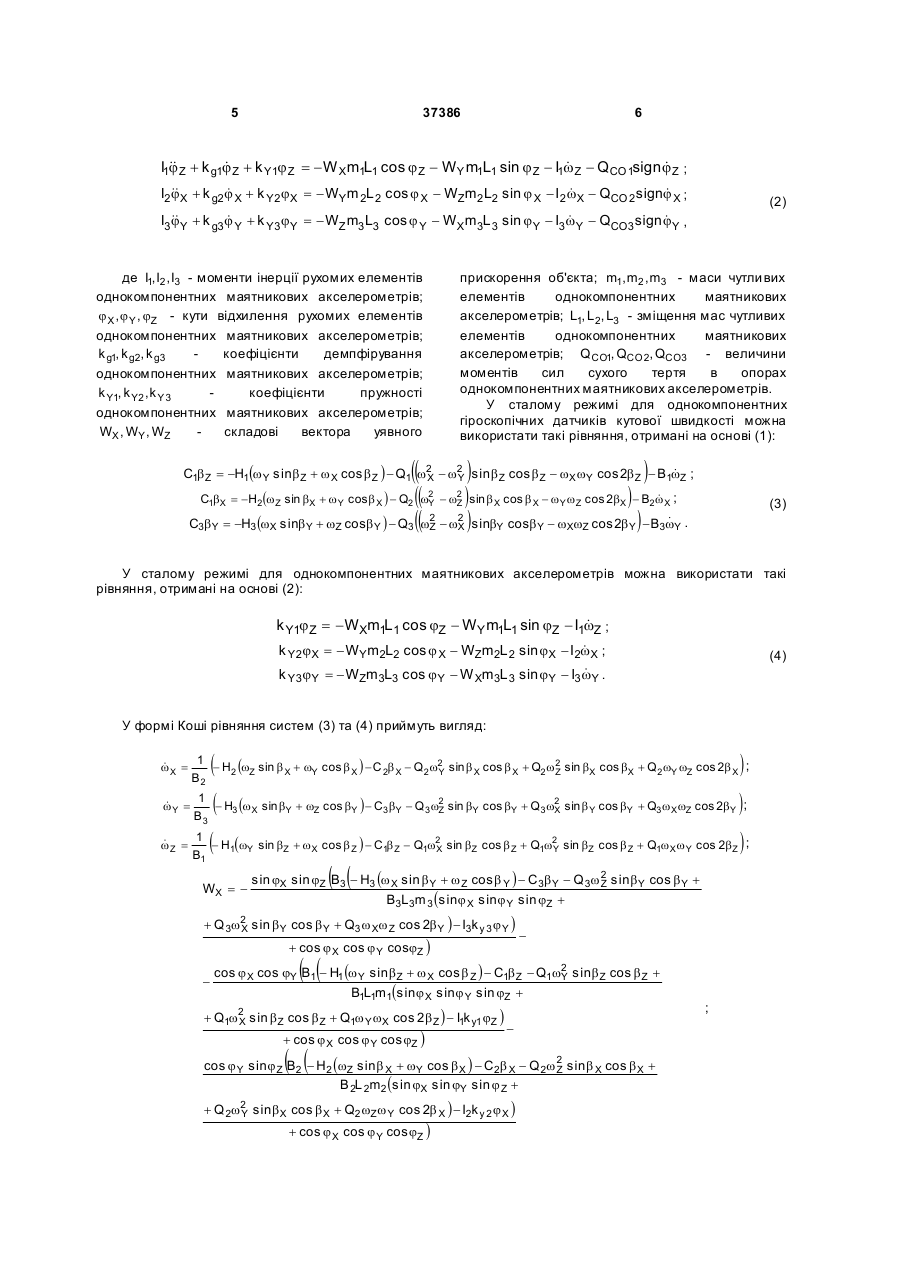
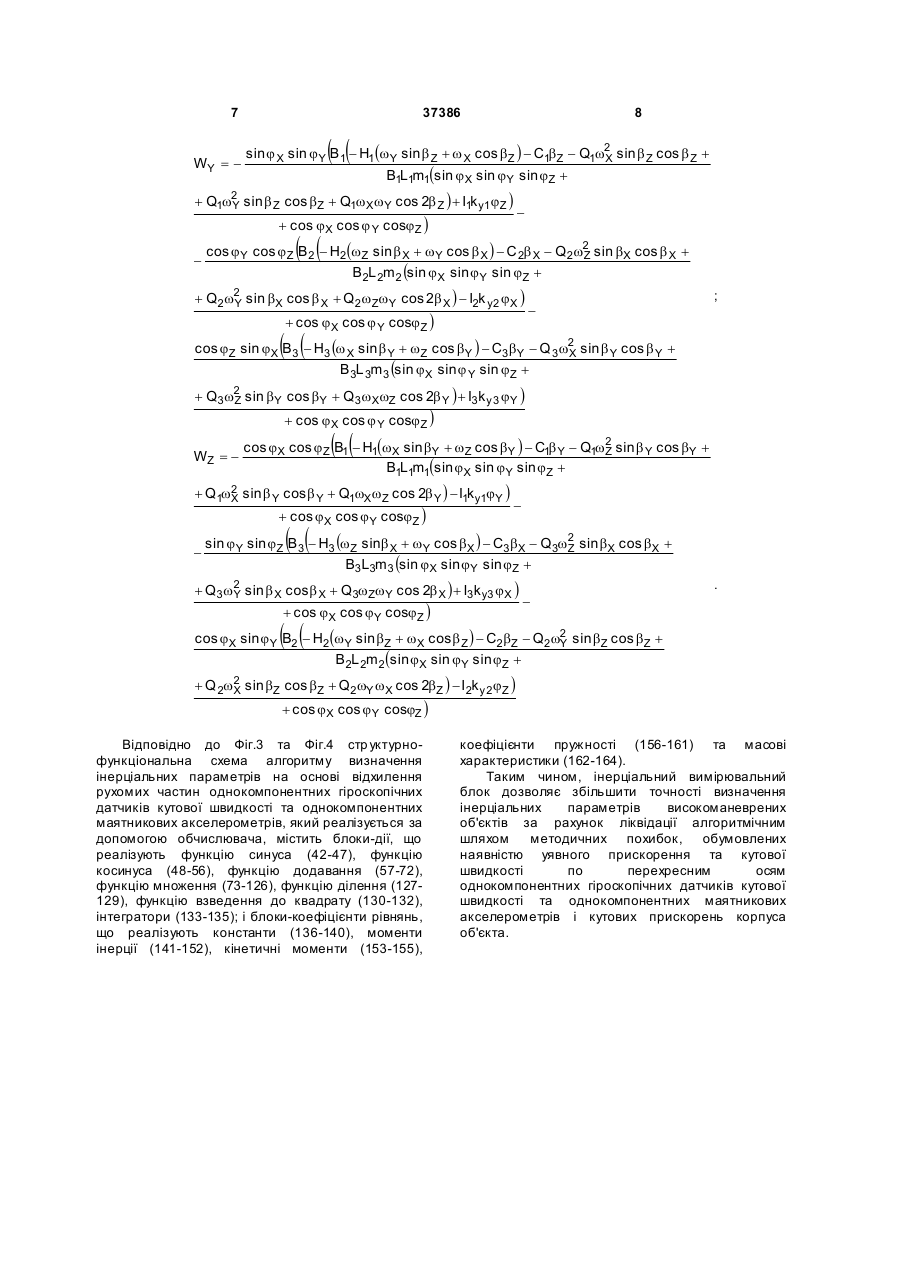
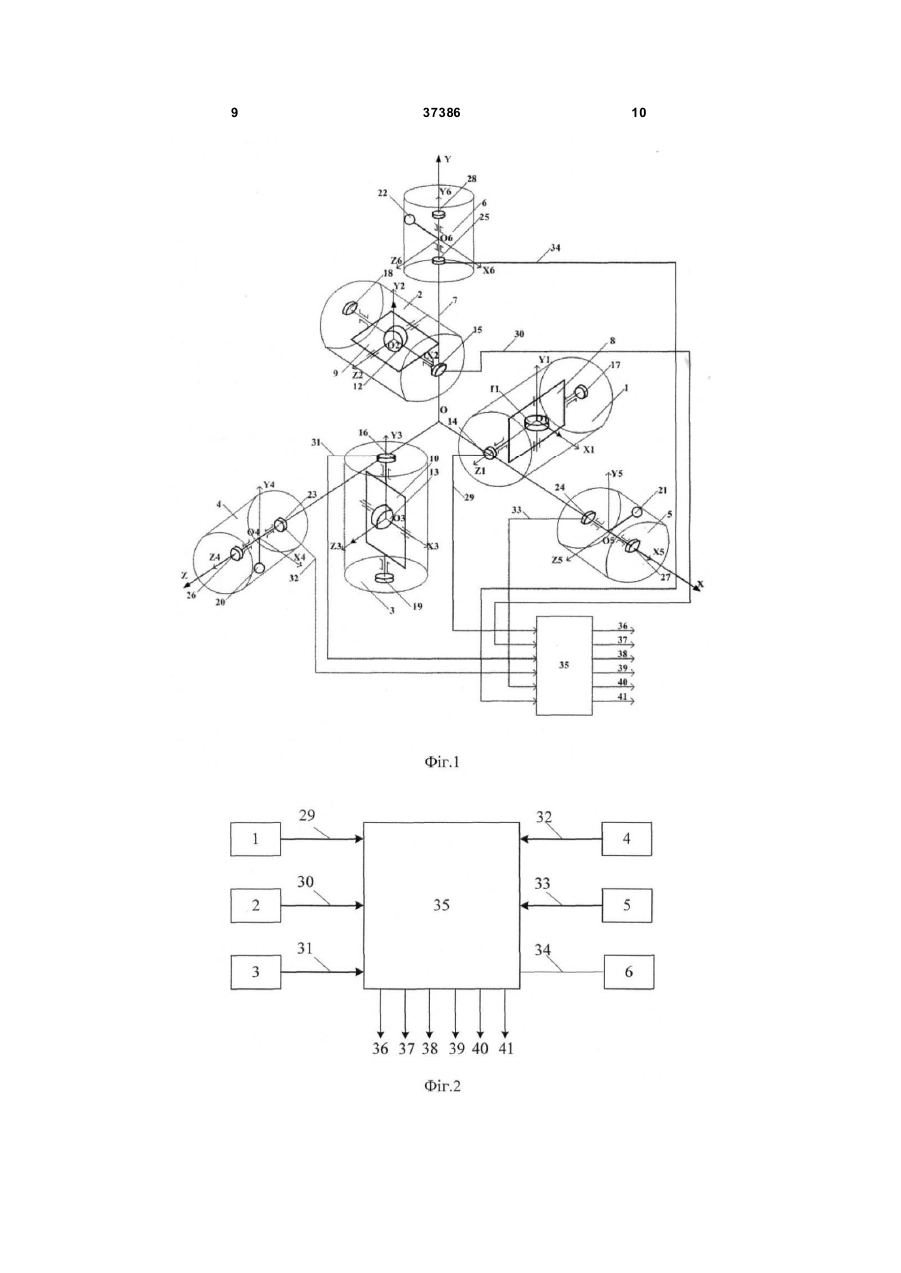
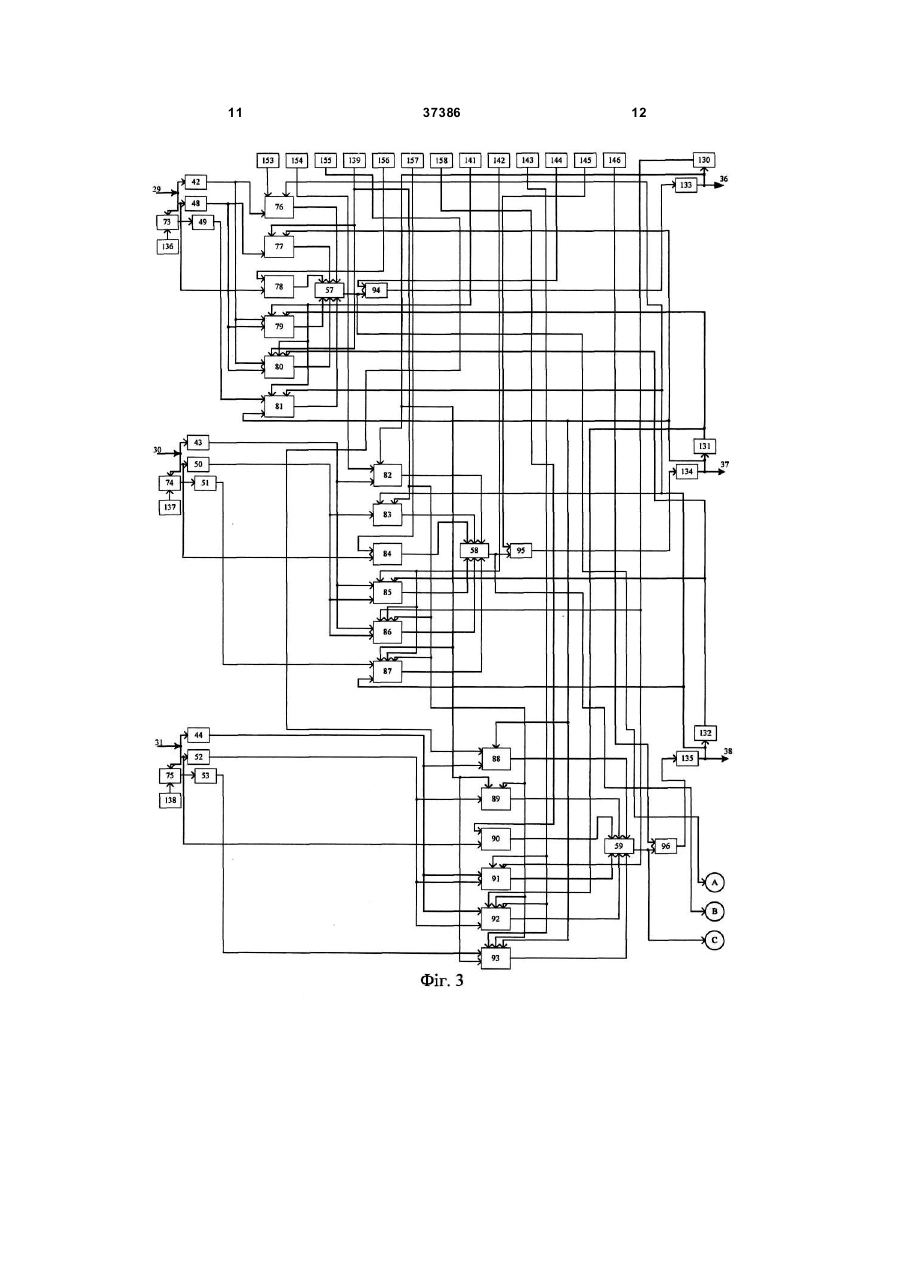
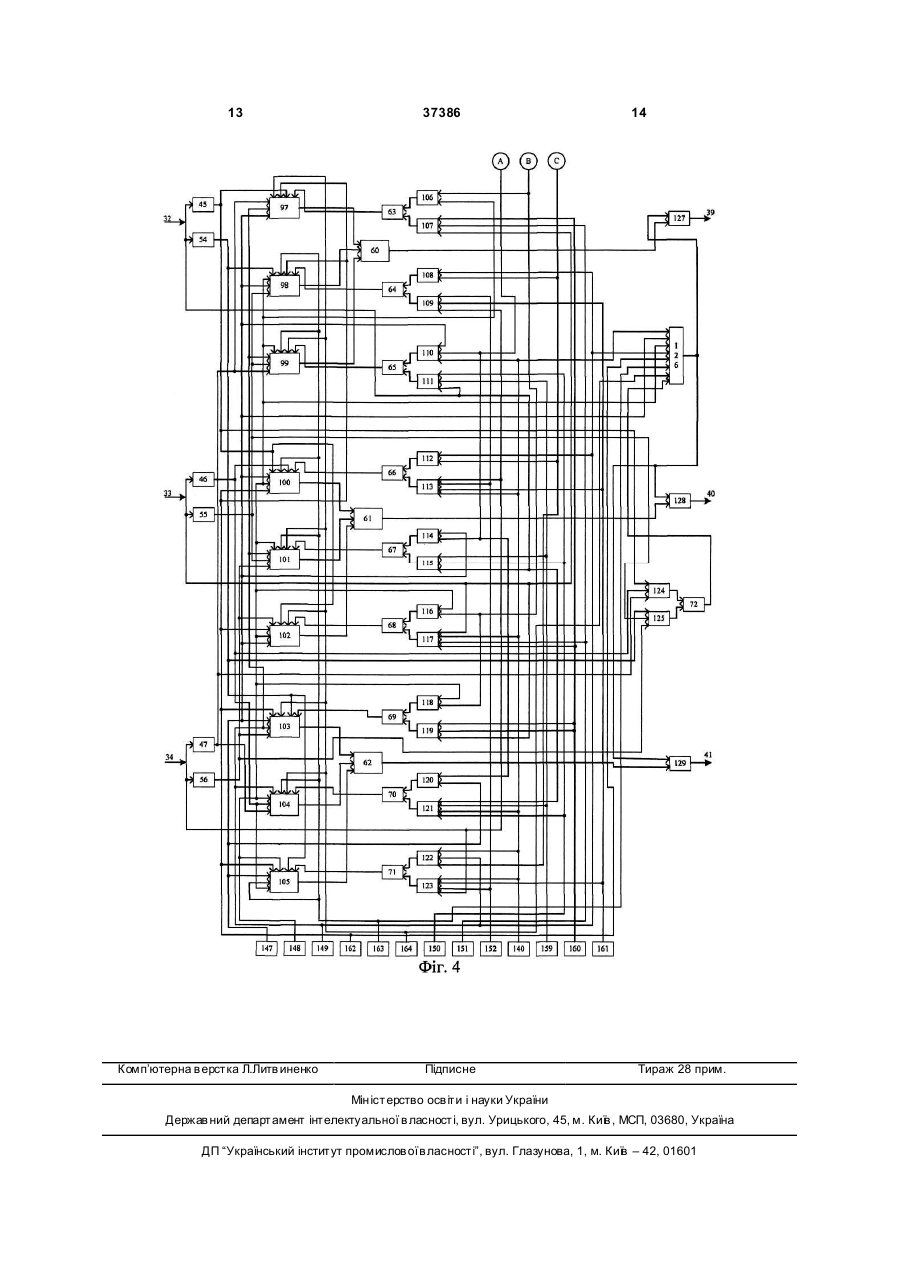
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, який відрізняється тим, що одноком 3 37386 однокомпонентних гіроскопічних датчиків кутової швидкості, ви ходи всіх шести вимірювачів кінематичних параметрів з'єднані з обчислювальним пристроєм. На Фіг.1 наведена структурно-кінематична схема інерціального вимірювального блоку. На Фіг.2 наведена структурно-функціональна схема інерціального вимірювального блоку. На Фіг.3 та на Фіг.4 наведена структурнофункціональна схема алгоритму визначення інерціальних параметрів, який реалізується за допомогою обчислювального пристрою. Інерціальний вимірювальний блок містить три однокомпонентних гіроскопічних датчика кутової швидкості 1, 2, 3 і три однокомпонентних маятникових акселерометри 4, 5, 6. Кожна з осей тріедрів OiXiZi (і=1, 2, 3, 4, 5, 6), зв'язаних з кожним із однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 та однокомпонентних маятникових акселерометрів 4, 5, 6, розміщена паралельно кожній з осей зв'язаної з об'єктом ортогональної системи координат OXYZ 7 відповідно. Кожний з однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 містить рухомі елементи - це рами 8, 9, 10, які відхиляються на певні кути. У кожній рамі 8, 9, 10 розташовані ротори 11, 12, 13 відповідно. Також до складу однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 входять датчики 14, 15, 16 кутів відхилення рухомих елементів і датчики моментів 17, 18, 19. Кожен з однокомпонентних маятникових акселерометрів 4, 5, 6 містить рухомі елементи - це інерційні маси 20, 21, 22, які відхиляються на певні кути. Також до складу однокомпонентних маятникових акселерометрів 4, 5, 6 входять датчики 23, 24, 25 кутів відхилення рухомих елементів і датчики моментів 26, 27, 28. Виходи 29, 30, 31, 32, 33, 34 кожного з датчиків 14, 15, 16, 23, 24, 25 кутів відхилення рухомих елементів з'єднані з обчислювальним пристроєм 35, за допомогою якого реалізується алгоритм визначення ( ) 4 інерціальних параметрів на основі інформації про кути відхилення рухомих елементів 8, 9, 10 однокомпонентних гіроскопічних датчиків кутової швидкості 1, 2, 3 та кути відхилення рухомих елементів 20, 21, 22 однокомпонентних маятникових акселерометрів 4, 5, 6. За допомогою алгоритму, який реалізується обчислювальним пристроєм, визначають три складові вектора кутової швидкості wX, wY, wZ та три складові вектора уявного прискорення WX, WY, WZ об'єкта. Обчислювальний пристрій 35 має виходи 36, 37, 38, 39, 40, 41 відповідно до кожного з інерціальних параметрів. Під час руху корпус об'єкта або зв'язана з ним ортогональна система координат OXYZ рухається в просторі, тобто можна представити вектор кутової швидкості тріедра та вектор уявного прискорення точки О. Кути відхилення рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості при цьому пропорційні проекціям вектора абсолютної кутової швидкості тріедра OXYZ на їх вісі чутливості. Кути відхилення рухомих елементів однокомпонентних маятникових акселерометрів при цьому пропорційні проекціям вектора уявного прискорення точки О на їх вісі чутли вості. Вихідні сигнали всіх шести вимірювачів, що пропорційні кутам відхилення їх рухомих елементів, подаються на вхід обчислювального пристрою, в якому відповідно до спеціального алгоритму визначаються величини проекцій вектора кутової швидкості корпуса об'єкта на осі зв'язаної з об'єктом ортогональної системи координат OXYZ та величини проекцій вектора уявного прискорення на осі зв'язаної з об'єктом ортогональної системи координат OXYZ. Система рівнянь, що описує динаміку рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості, може бути записана у вигляді: ) & & B1&&Z + b1bZ + C1bZ = -Q1 w2 - w2 sinbZ cos bZ - wX wY cos 2bZ - H1(w Y sinbZ + wX cos bZ ) - B1w Z ; b X Y ( = -Q ( w && & B2b X + b 2b X + C 2b X = && & B3b Y + b 3b Y + C 3b Y 2 -Q 2 wY 2 - wZ 2 Z 2 - wX 3 )sinb )sinb ) ) - H (w X & cos b X - wY wZ cos 2b X - H 2 (wZ sin b X + w Y cos b X ) - B2 wX ; Y cos b Y - wX wZ cos 2b Y де B1(2,3 ) = I0 + I2 (3,1) - I3 (1, 2) , I0 - екваторіальний момент інерції ротора однокомпонентних гіроскопічних датчиків кутової швидкості; I1, I2 , I3 осьові моменти інерції однокомпонентних гіроскопічних датчиків кутової швидкості; b X , b Y , b Z кути відхилення рухомих елементів однокомпонентних гіроскопічних датчиків кутової швидкості; b1, b2, b3 - коефіцієнти демпфірування однокомпонентних гіроскопічних датчиків кутової швидкості; C1, C2 , C3 - коефіцієнти пружності 3 X & sin b Y + wZ cos b Y ) - B 3w Y , (1) однокомпонентних гіроскопічних датчиків кутової швидкості; Q = I0 + I1(2,3 ) ; w X , w Y , wZ - проекції вектора кутової швидкості на відповідні вісі зв'язаної з об'єктом ортогональної системи координат; H1, H2 , H3 кінетичні моменти однокомпонентних гіроскопічних датчиків кутової швидкості. Система рівнянь, що описує динаміку рухомих елементів однокомпонентних маятникових акселерометрів, може бути записана у вигляді: 5 37386 6 && & & & I1j Z + k g1j Z + k Y1j Z = - W Xm1L1 cos j Z - WY m1L1 sin j Z - I1w Z - Q CO 1sign j Z ; && & & & I2 jX + k g2 j X + k Y2 jX = - WYm 2L 2 cos j X - WZm2 L2 sin j X - I 2 wX - QCO 2 signj X ; (2) && & & & I3 jY + k g3 j Y + k Y3 jY = - WZ m3 L3 cos j Y - WXm3L 3 sin jY - I3 wY - QCO3 sign jY , де I1, I2 , I3 - моменти інерції рухомих елементів однокомпонентних маятникових акселерометрів; j X , j Y , jZ - кути відхилення рухомих елементів однокомпонентних маятникових акселерометрів; k g1, k g2, k g3 коефіцієнти демпфірування однокомпонентних маятникових акселерометрів; k Y1, k Y2 , k Y 3 коефіцієнти пружності однокомпонентних маятникових акселерометрів; WX , WY , WZ складові вектора уявного прискорення об'єкта; m1, m2 , m3 - маси чутли вих елементів однокомпонентних маятникових акселерометрів; L1, L2, L3 - зміщення мас чутливих елементів однокомпонентних маятникових акселерометрів; Q CO1, QCO 2, QCO3 - величини моментів сил сухого тертя в опорах однокомпонентних маятникових акселерометрів. У сталому режимі для однокомпонентних гіроскопічних датчиків кутової швидкості можна використати такі рівняння, отримані на основі (1): (( ) ) & C1bZ = -H1(w Y sinbZ + w X cos bZ ) - Q1 w2 - w2 sinbZ cos bZ - wX wY cos 2bZ - B1wZ ; X Y & ) (( )sin b X cos b X - wYwZ cos 2bX )- B2wX ; 2 2 & C3b Y = -H3 (wX sinb Y + wZ cosb Y ) - Q3 ((wZ - wX )sinbY cosb Y - wXwZ cos 2b Y ) - B3wY . ( C1bX = -H2 w Z sin bX + w Y cos b X - Q2 w2 Y - w2 Z (3) У сталому режимі для однокомпонентних маятникових акселерометрів можна використати такі рівняння, отримані на основі (2): & k Y1j Z = - WXm1L1 cos jZ - WY m1L1 sin jZ - I1wZ ; & k Y 2 j X = - WY m 2L2 cos j X - WZm 2L 2 sin j X - I 2wX ; (4) & k Y 3 j Y = - WZm 3L3 cos j Y - W Xm 3L 3 sin j Y - I3 wY . У формі Коші рівняння систем (3) та (4) приймуть вигляд: ( 1 = (- H (w sin b + w cos b )- C b - Q w sin b B 1 = (- H (w sin b + w cos b ) - C b - Q w sin b B & wX = & wY & wZ ) cos 2b ) ; cos 2b ) ; 1 - H2 (wZ sin b X + wY cos b X ) - C 2b X - Q2w2 sin b X cos b X + Q2w2 sin bX cos bX + Q2wY wZ cos 2b X ; Y Z B2 3 1 3 1 X Y WX = Y Z Y 3 Y 2 3 Z Y cos bY + Q3w2 sin b Y cos bY + Q3wXwZ X Z X Z 1 Z 2 1 X Z cos b Z + Q1w2 sin bZ cos b Z + Q1wXwY Y Z ( ( sin jX sin jZ B3 - H3 (w X sin bY + w Z cos b Y ) - C3bY - Q 3w 2 sinbY cos bY + Z B3L3m 3 (sinj X sinj Y sin jZ + + Q 3w2 sin bY cos bY + Q3 w Xw Z cos 2bY ) - I3k y 3 j Y ) X + cos j X cos j Y cosjZ ) Y ( ( cos j X cos jY B1 - H1 (w Y sinbZ + w X cos b Z ) - C1bZ - Q1w2 sinbZ cos bZ + Y B1L1m1(sinj X sinj Y sin jZ + + Q1w2 sin bZ cos bZ + Q1w Y wX cos 2bZ ) - I1k y1 jZ ) X + cos j X cos j Y cos jZ ) ( ( cos j Y sinj Z B2 - H2 (wZ sinb X + wY cos bX ) - C2b X - Q 2w 2 sinb X cos bX + Z B 2L 2m2 (sin jX sin jY sin j Z + + Q 2w2 sinbX cos bX + Q2 wZw Y cos 2b X ) - I2k y 2 j X ) Y + cos j X cos j Y cos jZ ) ; 7 WY = 37386 8 ( ( sin j X sin jY B1 - H1 (wY sin b Z + w X cos bZ ) - C1bZ - Q1w2 sin b Z cos b Z + X B1L1m1(sin jX sin jY sin jZ + + Q1w2 sin b Z cos bZ + Q1wXwY cos 2b Z ) + I1k y1 jZ ) Y + cos jX cos j Y cosjZ ) ( ( cos jY cos jZ B2 - H2 (wZ sin b X + wY cos b X ) - C 2b X - Q2 w2 sin bX cos b X + Z B2L 2m2 (sin jX sin jY sin jZ + + Q2 w2 sin bX cos b X + Q2 wZwY cos 2b X ) - I2k y2 jX ) Y + cos jX cos j Y cosjZ ) ; ( ( cos jZ sin jX B3 - H3 (w X sin b Y + wZ cos bY ) - C3 bY - Q 3 w2 sin b Y cos b Y + X B3L 3m3 (sin jX sin j Y sin jZ + + Q3 w2 sin bY cos bY + Q3 wXwZ cos 2b Y ) + I3 k y 3 jY ) Z + cos jX cos j Y cosjZ ) WZ = ( ( cos jX cos jZ B1 - H1(wX sin bY + wZ cos bY ) - C1b Y - Q1w2 sin b Y cos bY + Z B1L1m1(sin jX sin jY sin jZ + + Q1w2 sin b Y cos b Y + Q1wX wZ cos 2b Y ) - I1k y1jY ) X + cos jX cos jY cosjZ ) ( ( sin jY sin jZ B 3 - H3 (wZ sinb X + wY cos bX ) - C3 bX - Q3w2 sin bX cos bX + Z B3 L3m3 (sin jX sin jY sin jZ + + Q3 w2 sin b X cos b X + Q3wZwY cos 2b X ) + I3 k y3 jX ) Y + cos jX cos jY cosjZ ) . ( ( cos jX sin jY B2 - H2 (wY sin bZ + wX cos b Z ) - C2 bZ - Q2 w2 sin bZ cos bZ + Y B 2L 2m2 (sin jX sin jY sin jZ + + Q 2w2 sin bZ cos bZ + Q2 wY wX cos 2bZ ) - I 2k y 2 jZ ) X + cos jX cos jY cosjZ ) Відповідно до Фіг.3 та Фіг.4 стр уктурнофункціональна схема алгоритму визначення інерціальних параметрів на основі відхилення рухомих частин однокомпонентних гіроскопічних датчиків кутової швидкості та однокомпонентних маятникових акселерометрів, який реалізується за допомогою обчислювача, містить блоки-дії, що реалізують функцію синуса (42-47), функцію косинуса (48-56), функцію додавання (57-72), функцію множення (73-126), функцію ділення (127129), функцію взведення до квадрату (130-132), інтегратори (133-135); і блоки-коефіцієнти рівнянь, що реалізують константи (136-140), моменти інерції (141-152), кінетичні моменти (153-155), коефіцієнти пружності (156-161) та масові характеристики (162-164). Таким чином, інерціальний вимірювальний блок дозволяє збільшити точності визначення інерціальних параметрів високоманеврених об'єктів за рахунок ліквідації алгоритмічним шляхом методичних похибок, обумовлених наявністю уявного прискорення та кутової швидкості по перехресним осям однокомпонентних гіроскопічних датчиків кутової швидкості та однокомпонентних маятникових акселерометрів і кутових прискорень корпуса об'єкта. 9 37386 10 11 37386 12 13 Комп’ютерна в ерстка Л.Литв иненко 37386 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial measuring block
Автори англійськоюHordin Oleksandr Hryhorovych, Shulhina Liudmyla Andriivna
Назва патенту російськоюИнерциальный измерительный блок
Автори російськоюГордин Александр Григорьевич, Шульгина Людмила Андреевна
МПК / Мітки
МПК: G01P 9/00
Мітки: блок, інерціальній, вимірювальний
Код посилання
<a href="https://ua.patents.su/7-37386-inercialnijj-vimiryuvalnijj-blok.html" target="_blank" rel="follow" title="База патентів України">Інерціальний вимірювальний блок</a>
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Шипітько Олена Олександрівна, Гордін Олександр Григорович, Калашникова Валерія Михайлівна
МПК: G01C 21/00
Мітки: функціонально-надлишковий, блок, вимірювальний, інерціальній
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Безплатформний інерціальний блок

Номер патенту: 35089
Опубліковано: 26.08.2008
Автори: Фірсов Сергій Миколайович, Субота Анатолій Максимович, Апоян Армен Генрікович, Кулік Анатолій Степанович, Златкін Олег Юрьєвич
МПК: G01C 21/00
Мітки: безплатформний, блок, інерціальній
Формула / Реферат:
Безплатформний інерціальний вимірювальний блок, що містить основу, на котрій розміщені гіроскопи, акселерометри, джерела струму, сервісні електронні блоки, який відрізняється тим, що відносно кожної ортогональної осі установлено по мікромеханічному акселерометру, осі чутливості яких співпадають з названими осями, і три мікромеханічні двовісні датчики кутової швидкості, осі чутливості першого з них паралельні осям Х і Y, другого - осям Y і Z,...
Вимірювальний блок для навігаційного пристрою
Номер патенту: 1674
Опубліковано: 17.03.2003
Автори: Захаренко Анатолій Олександрович, Карпачов Юрій Андрійович, Чаус Леонід Михайлович, Савенко Юрій Миколайович, Токарев Олег Дмитрович
МПК: G01C 21/04
Мітки: навігаційного, вимірювальний, блок, пристрою
Формула / Реферат:
1. Вимірювальний блок для навігаційного пристрою, який містить корпус, дворамковий кардановий підвіс, маятник, з’єднаний із точкою перетинання його осей за допомогою нижнього вертикального стержня, і два феррозонди, який відрізняється тим, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим підвісом, центр якої з’єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому...
Відмовостійкий блок акселерометрів

Номер патенту: 36546
Опубліковано: 27.10.2008
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Златкін Олег Юрійович, Аблаєв Тімур Асанович
МПК: G01C 21/00
Мітки: блок, відмовостійкий, акселерометрів
Формула / Реферат:
Відмовостійкий блок акселерометрів, що складається з акселерометрів, три з яких розташовані у вигляді правильної трикутної піраміди, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що четвертий акселерометр розташований по діагоналі куба на відстані , де
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 36480
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Пилев Михайло Юрійович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Златкін Олег Юрійович
МПК: G01C 21/00
Мітки: швидкостей, кутових, блок, відмовостійкий, датчиків
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що додатково введений четвертий датчик кутової швидкості, розташований по діагоналі куба на відстані , де R - відстань від центру системи до інших датчиків, виходи...
Попередній патент: Пристрій фільтрації сигналу
Наступний патент: Система стабілізації вихідної напруги вітрогенераторної установки
Випадковий патент: Спосіб діагностики постінфарктного синдрому