Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака
Номер патенту: 74759
Опубліковано: 12.11.2012
Автори: Гордієвський Олексій Тихонович, Гудима Олег Петрович, Ткаченко Володимир Анатолійович, Архипов Микола Іванович, Галушка Володимир Іванович, Расстригін Олександр Олексійович, Башинський Володимир Григорович, Кузнецов Владлен Олександрович, Комаров Володимир Олександрович

Формула / Реферат
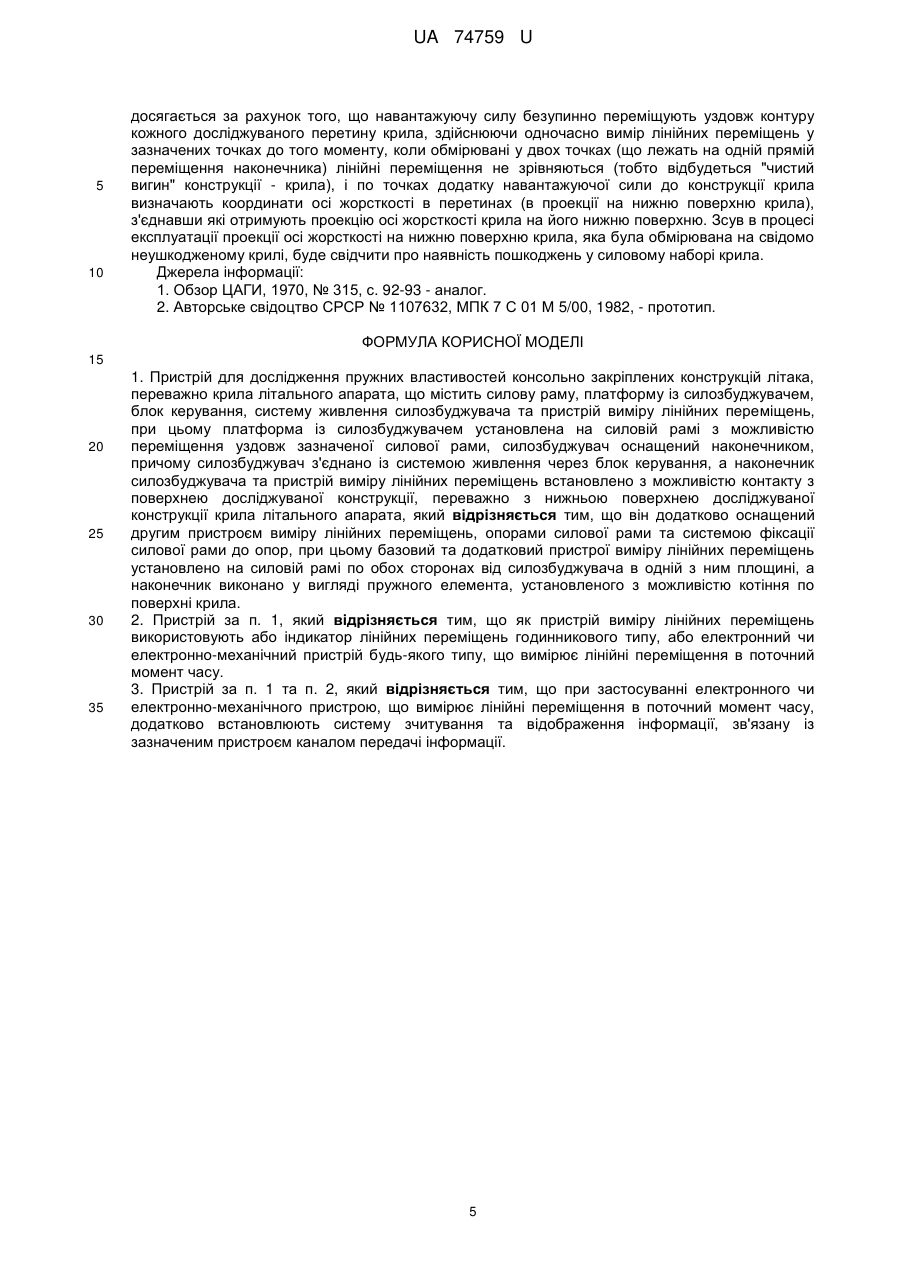
1. Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака, переважно крила літального апарата, що містить силову раму, платформу із силозбуджувачем, блок керування, систему живлення силозбуджувача та пристрій виміру лінійних переміщень, при цьому платформа із силозбуджувачем установлена на силовій рамі з можливістю переміщення уздовж зазначеної силової рами, силозбуджувач оснащений наконечником, причому силозбуджувач з'єднано із системою живлення через блок керування, а наконечник силозбуджувача та пристрій виміру лінійних переміщень встановлено з можливістю контакту з поверхнею досліджуваної конструкції, переважно з нижньою поверхнею досліджуваної конструкції крила літального апарата, який відрізняється тим, що він додатково оснащений другим пристроєм виміру лінійних переміщень, опорами силової рами та системою фіксації силової рами до опор, при цьому базовий та додатковий пристрої виміру лінійних переміщень установлено на силовій рамі по обох сторонах від силозбуджувача в одній з ним площині, а наконечник виконано у вигляді пружного елемента, установленого з можливістю котіння по поверхні крила.
2. Пристрій за п. 1, який відрізняється тим, що як пристрій виміру лінійних переміщень використовують або індикатор лінійних переміщень годинникового типу, або електронний чи електронно-механічний пристрій будь-якого типу, що вимірює лінійні переміщення в поточний момент часу.
3. Пристрій за п. 1 та п. 2, який відрізняється тим, що при застосуванні електронного чи електронно-механічного пристрою, що вимірює лінійні переміщення в поточний момент часу, додатково встановлюють систему зчитування та відображення інформації, зв'язану із зазначеним пристроєм каналом передачі інформації.
Текст
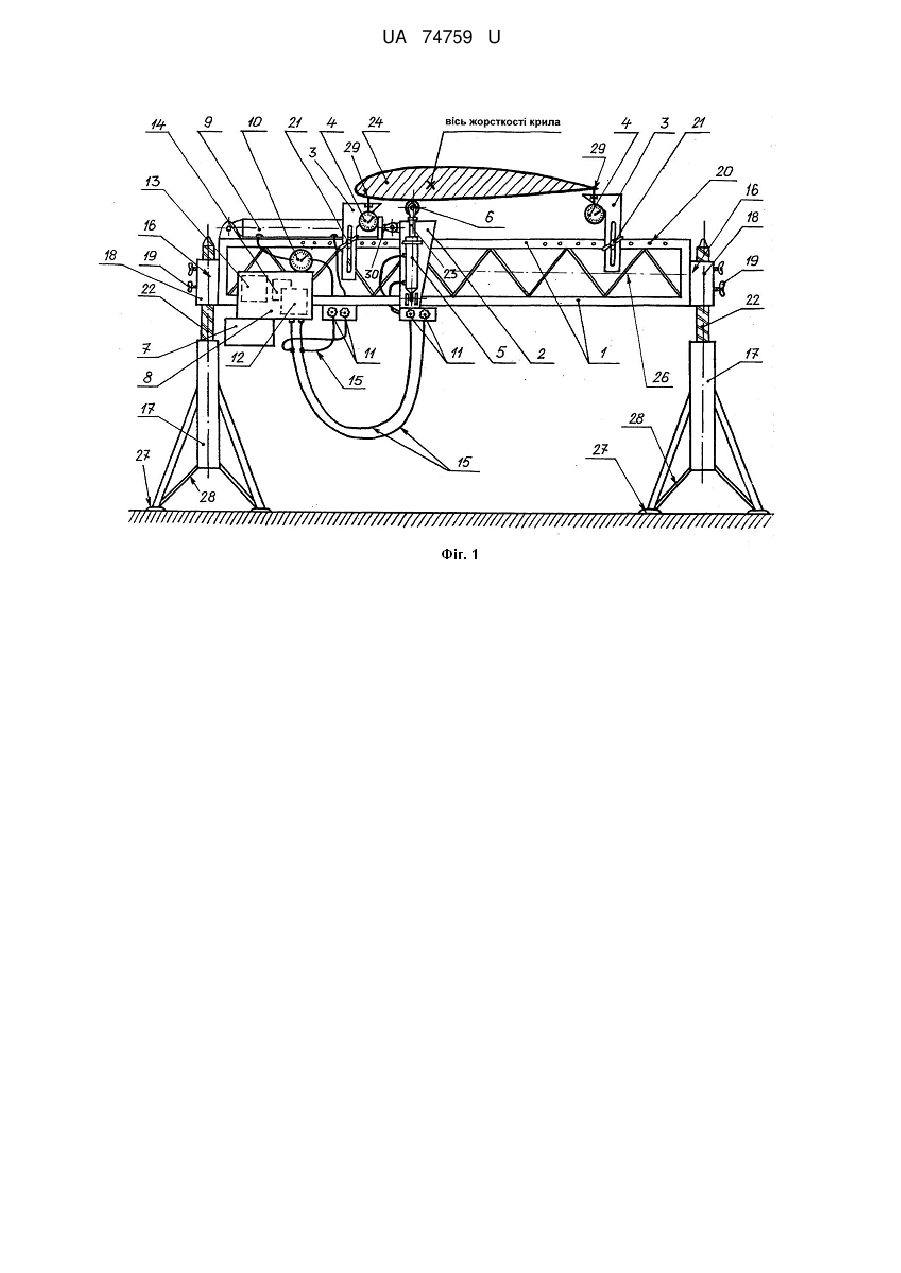
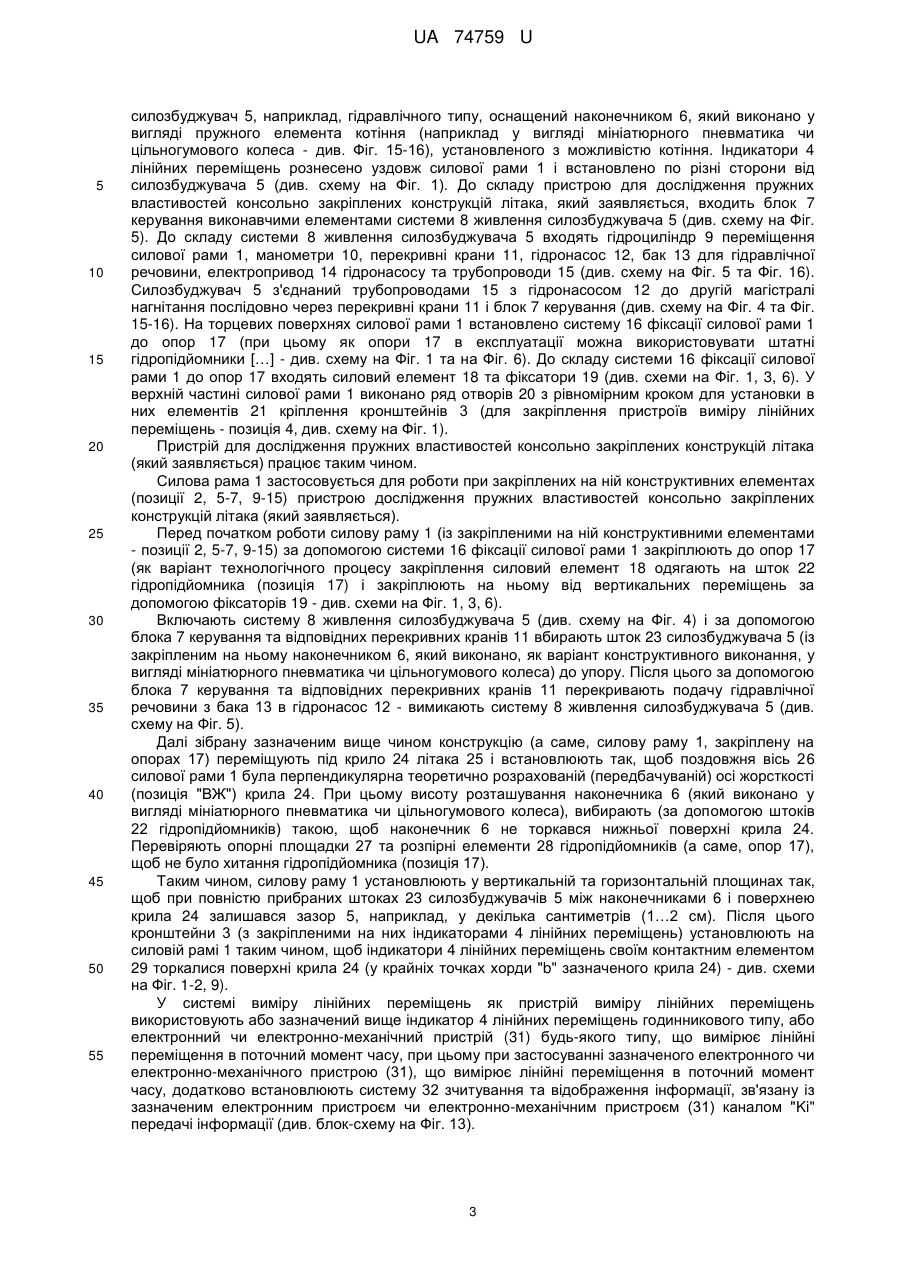
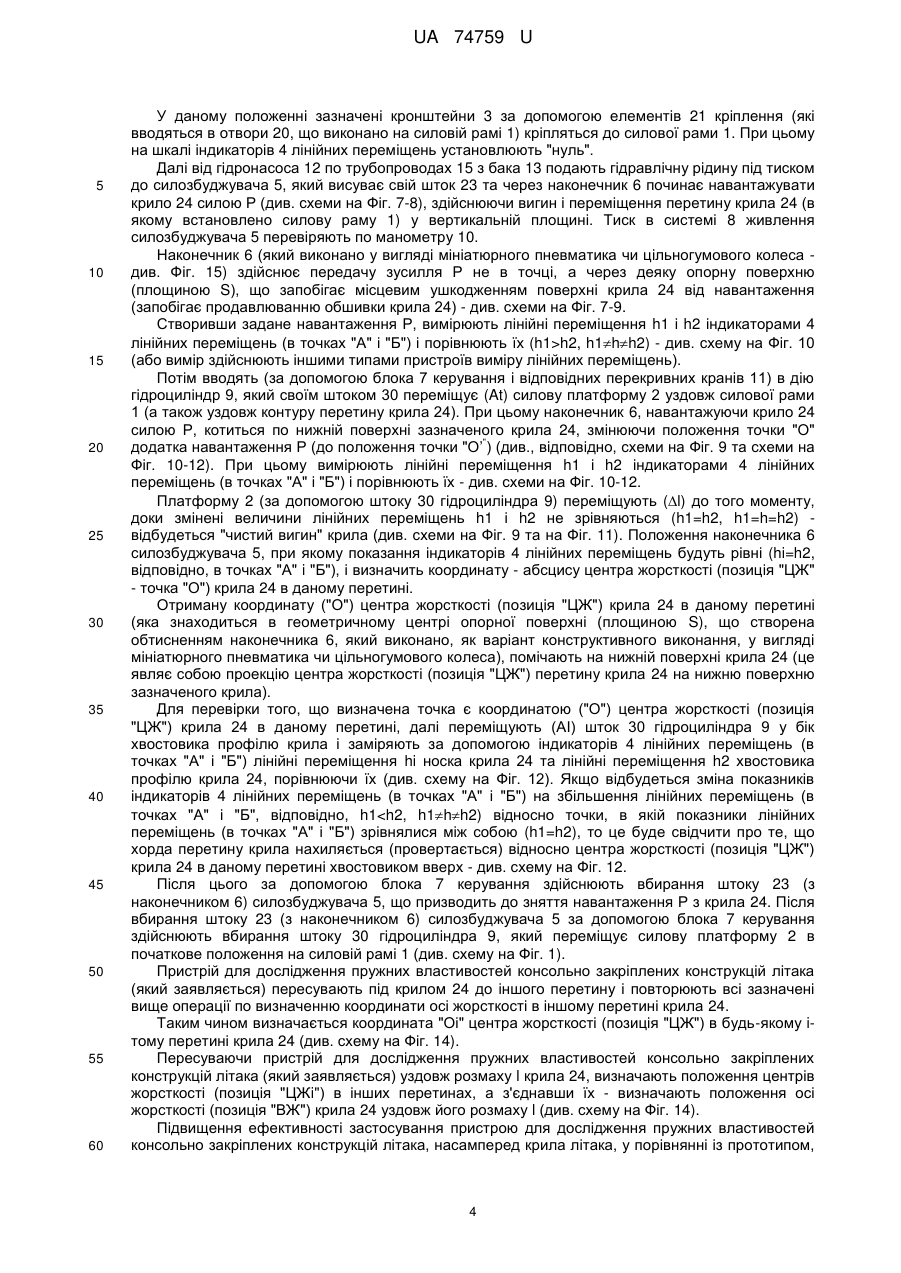
Реферат: Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака, переважно крила літального апарата, містить силову раму, платформу із силозбуджувачем, блок керування, систему живлення силозбуджувача та пристрій виміру лінійних переміщень. Додатково оснащений другим пристроєм виміру лінійних переміщень, опорами силової рами та системою фіксації силової рами до опор. UA 74759 U (12) UA 74759 U UA 74759 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіації, зокрема до пристроїв для дослідження пружних властивостей конструкцій, а саме до пристроїв для дослідження пружних властивостей консольно закріплених конструкцій літального апарата (переважно літака), що можуть бути використані для експериментального визначення осі жорсткості консольно закріплених тонкостінних конструкцій, наприклад крила, стабілізатора та кіля літального апарата - літака будь-якого типу. Відомий пристрій для дослідження пружних властивостей конструкцій, що містить силозбуджувач і датчики лінійних переміщень [1]. До недоліків відомого пристрою для дослідження пружних властивостей конструкцій належить те, що за допомогою зазначеного пристрою можна визначити тільки переміщення контрольних точок конструкції, а координати осі жорсткості в досліджуваному перетині конструкції не визначаються. Найбільш близьким технічним рішенням як по суті, так і за результатом, що досягається, яке вибрано за найближчий аналог (прототип), є пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака, наприклад крила літака, що містить силову раму, платформу із силозбуджувачем, блок керування, систему живлення силозбуджувача та пристрій виміру лінійних переміщень, при цьому платформа із силозбуджувачем установлена на силовій рамі з можливістю переміщення уздовж зазначеної силової рами, силозбуджувач оснащений наконечником, причому силозбуджувач з'єднано із системою живлення через блок керування, а наконечник силозбуджувача та пристрій виміру лінійних переміщень встановлено з можливістю контакту з поверхнею досліджуваної конструкції, переважно з нижньою поверхнею досліджуваної конструкції крила літального апарата [2]. До недоліків відомого технічного рішення, яке вибрано за найближчий аналог (прототип), належить те, що при його використанні вимірюють лінійні переміщення конструкції в точках, які не лежать на одній прямій, що знаходиться в площині дії навантажуючої сили, тим самим не забезпечується точність визначення осі жорсткості консольно закріпленої конструкції насамперед крила літака. В основу корисної моделі поставлена задача шляхом усунення недоліків прототипу забезпечити підвищення точності визначення положення осі жорсткості консольно закріплених авіаційних конструкцій, зокрема крила літального апарата (переважно літака). Суть корисної моделі в пристрої для дослідження пружних властивостей консольно закріплених конструкцій літака, переважно крила літака, що містить силову раму, платформу із силозбуджувачем, блок керування, систему живлення силозбуджувача та пристрій виміру лінійних переміщень, при цьому платформа із силозбуджувачем установлена на силовій рамі з можливістю переміщення уздовж зазначеної силової рами, силозбуджувач оснащений наконечником, причому силозбуджувач з'єднано із системою живлення через блок керування, а наконечник силозбуджувача та пристрій виміру лінійних переміщень встановлено з можливістю контакту з поверхнею досліджуваної конструкції, переважно з нижньою поверхнею досліджуваної конструкції крила літального апарата, полягає в тому, що він додатково оснащений другим пристроєм виміру лінійних переміщень, опорами силової рами та системою фіксації силової рами до опор. Суть корисної моделі полягає і в тому, що базовий та додатковий пристрої виміру лінійних переміщень установлено на силовій рамі по обох сторонах від силозбуджувача в одній з ним площині, а наконечник виконано у вигляді пружного елемента, установленого з можливістю котіння по поверхні крила. Суть корисної моделі полягає також і в тому, що як пристрій виміру лінійних переміщень використовують або індикатор лінійних переміщень годинникового типу, або електронний чи електронно-механічний пристрій будьякого типу, що вимірює лінійні переміщення в поточний момент часу. Новим в корисній моделі є те, що при застосуванні електронного чи електронно-механічного пристрою, що вимірює лінійні переміщення в поточний момент часу, додатково встановлюють систему зчитування та відображення інформації, зв'язану із зазначеним пристроєм каналом передачі інформації. Рішення технічної задачі в пристрої для дослідження пружних властивостей консольно закріплених конструкцій літака, який заявляється, дійсно можливе тому, що: - шляхом встановлення другого пристрою виміру лінійних переміщень забезпечується можливість зняття показників лінійних переміщень в точках, що є найбільш віддаленими між собою в одному перетині крила - на носку крила та на хвостовику перетину крила; - шляхом встановлення базового та додаткового пристроїв виміру лінійних переміщень на силовій рамі по обох сторонах від силозбуджувача в одній з ним площині забезпечується можливість виміру лінійних переміщень в точках відносно точки додатка навантажуючої сили, яка змінює своє положення відносно нерухомих точок, в яких знімаються показники лінійних 1 UA 74759 U 5 10 15 20 25 30 35 40 45 50 55 60 переміщень точок, що є найбільш віддаленими між собою в одному перетині крила - на носку крила та на хвостовику перетину крила; - шляхом встановлення силової рами на опорах забезпечується жорсткість конструкції і можливість регулювання висоти розташування силової рами відносно крила літака (при різних висотах знаходження нижньої поверхні крила відносно землі - поверхні стоянки літака; - шляхом встановлення на силову раму системи фіксації силової рами до опори забезпечується жорсткість конструкції від вертикальних переміщень силової рами в момент додавання навантажуючої сили від силозбуджувача до крила з метою його вигину для визначення лінійних переміщень точок, що є найбільш віддаленими між собою в одному перетині крила - на носку крила та на хвостовику перетину крила, - шляхом застосування як пристрою виміру лінійних переміщень (замість індикатора лінійних переміщень годинникового типу) електронного чи електронно-механічний пристрій будь-якого типу, що вимірює лінійні переміщення в поточний момент часу, забезпечують підвищення точності виміру, при цьому при застосуванні як пристрою виміру лінійних переміщень електронного пристрою, що вимірює лінійні переміщення в поточний момент часу, додатково встановлюють систему зчитування та відображення інформації, зв'язану із зазначеним електронним пристроєм каналом передачі інформації, що забезпечують документування отриманої інформації і нанесення її на носії інформації. Таким чином, пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака, який заявляється, відповідає критерію корисної моделі "новизна". Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 представлено конструктивно-компонувальну схему пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, що заявляється, на Фіг. 2 показано схему встановлення пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, що заявляється, під крилом літака для вимірювання координат осі жорсткості крила, на Фіг. 3 показано схему встановлення пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, що заявляється, під крилом літака (типу Су-25) для вимірювання координат осі жорсткості крила у площині, що перпендикулярна теоретично розрахованій осі жорсткості, на Фіг. 4 показано схему встановлення пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, що заявляється, під крилом літака (типу Су-25) для вимірювання координат осі жорсткості крила (на виді зверху), на Фіг. 5 показано схему гідравлічної системи пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, що заявляється, на Фіг. 6 показано схему закріплення силової рами до опори, на Фіг. 7 показано схему контакту наконечника, який виконано у вигляді пружного елемента котіння (наприклад у вигляді мініатюрного пневматика чи цільногумового колеса), до поверхні крила (на виді збоку), на Фіг. 8 показано схему контакту наконечника, який виконано у вигляді пружного елемента котіння (наприклад у вигляді мініатюрного пневматика чи цільногумового колеса), до поверхні крила (на виді спереду - в площині котіння), на Фіг. 9 показано схему котіння наконечника, який виконано у вигляді пружного елемента котіння (наприклад у вигляді мініатюрного пневматика чи цільногумового колеса), по поверхні крила при переміщенні платформи по силовій рамі, на Фіг. 10-12 показано схеми послідовного прикладання навантажуючої сили за допомогою наконечника до нижньої поверхні крила для вимірювання "чистого вигину" крила (за допомогою індикаторів виміру лінійних переміщень або пристроїв виміру лінійних переміщень іншого типу), на Фіг. 13 показано блок-схему системи виміру лінійних переміщень при застосуванні пристроїв виміру лінійних переміщень іншого типу, ніж індикатори лінійних переміщень, на Фіг. 14 показано визначення осі жорсткості крила по експериментально визначеним координатам центра жорсткості перетину крила, на Фіг. 15 показано зовнішній вигляд наконечника силозбуджувача (який виконано у вигляді мініатюрного пневматика), встановленого на силовій платформі, на Фіг. 16 показано конструкцію силової рами із розміщеними на ній виконавчими елементами системи живлення силозбуджувача, на Фіг. 17 показано контакт наконечника силозбуджувача (який виконано у вигляді мініатюрного пневматика), з обшивкою нижньої поверхні крила літака типу МіГ-29, на Фіг. 18 показано контактування з нижньою поверхнею крила (в районі носка крила) контактного елемента індикатора лінійних переміщень (часового типу) та наконечника силозбуджувача (який виконано у вигляді мініатюрного пневматика), з нижньою поверхнею крила літака типу МІГ-29. Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака (див. схему на Фіг. 1) містить (як варіант конструктивного виконання) силову раму 1, на якій з можливістю переміщення змонтована платформа 2 і встановлені на кронштейнах 3 індикатори 4 лінійних переміщень (або електронні чи електронно-механічні пристрої будь-якого типу, що вимірюють лінійні переміщення в поточний момент часу). На платформі 2 закріплений 2 UA 74759 U 5 10 15 20 25 30 35 40 45 50 55 силозбуджувач 5, наприклад, гідравлічного типу, оснащений наконечником 6, який виконано у вигляді пружного елемента котіння (наприклад у вигляді мініатюрного пневматика чи цільногумового колеса - див. Фіг. 15-16), установленого з можливістю котіння. Індикатори 4 лінійних переміщень рознесено уздовж силової рами 1 і встановлено по різні сторони від силозбуджувача 5 (див. схему на Фіг. 1). До складу пристрою для дослідження пружних властивостей консольно закріплених конструкцій літака, який заявляється, входить блок 7 керування виконавчими елементами системи 8 живлення силозбуджувача 5 (див. схему на Фіг. 5). До складу системи 8 живлення силозбуджувача 5 входять гідроциліндр 9 переміщення силової рами 1, манометри 10, перекривні крани 11, гідронасос 12, бак 13 для гідравлічної речовини, електропривод 14 гідронасосу та трубопроводи 15 (див. схему на Фіг. 5 та Фіг. 16). Силозбуджувач 5 з'єднаний трубопроводами 15 з гідронасосом 12 до другій магістралі нагнітання послідовно через перекривні крани 11 і блок 7 керування (див. схему на Фіг. 4 та Фіг. 15-16). На торцевих поверхнях силової рами 1 встановлено систему 16 фіксації силової рами 1 до опор 17 (при цьому як опори 17 в експлуатації можна використовувати штатні гідропідйомники […] - див. схему на Фіг. 1 та на Фіг. 6). До складу системи 16 фіксації силової рами 1 до опор 17 входять силовий елемент 18 та фіксатори 19 (див. схеми на Фіг. 1, 3, 6). У верхній частині силової рами 1 виконано ряд отворів 20 з рівномірним кроком для установки в них елементів 21 кріплення кронштейнів 3 (для закріплення пристроїв виміру лінійних переміщень - позиція 4, див. схему на Фіг. 1). Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака (який заявляється) працює таким чином. Силова рама 1 застосовується для роботи при закріплених на ній конструктивних елементах (позиції 2, 5-7, 9-15) пристрою дослідження пружних властивостей консольно закріплених конструкцій літака (який заявляється). Перед початком роботи силову раму 1 (із закріпленими на ній конструктивними елементами - позиції 2, 5-7, 9-15) за допомогою системи 16 фіксації силової рами 1 закріплюють до опор 17 (як варіант технологічного процесу закріплення силовий елемент 18 одягають на шток 22 гідропідйомника (позиція 17) і закріплюють на ньому від вертикальних переміщень за допомогою фіксаторів 19 - див. схеми на Фіг. 1, 3, 6). Включають систему 8 живлення силозбуджувача 5 (див. схему на Фіг. 4) і за допомогою блока 7 керування та відповідних перекривних кранів 11 вбирають шток 23 силозбуджувача 5 (із закріпленим на ньому наконечником 6, який виконано, як варіант конструктивного виконання, у вигляді мініатюрного пневматика чи цільногумового колеса) до упору. Після цього за допомогою блока 7 керування та відповідних перекривних кранів 11 перекривають подачу гідравлічної речовини з бака 13 в гідронасос 12 - вимикають систему 8 живлення силозбуджувача 5 (див. схему на Фіг. 5). Далі зібрану зазначеним вище чином конструкцію (а саме, силову раму 1, закріплену на опорах 17) переміщують під крило 24 літака 25 і встановлюють так, щоб поздовжня вісь 26 силової рами 1 була перпендикулярна теоретично розрахованій (передбачуваній) осі жорсткості (позиція "ВЖ") крила 24. При цьому висоту розташування наконечника 6 (який виконано у вигляді мініатюрного пневматика чи цільногумового колеса), вибирають (за допомогою штоків 22 гідропідйомників) такою, щоб наконечник 6 не торкався нижньої поверхні крила 24. Перевіряють опорні площадки 27 та розпірні елементи 28 гідропідйомників (а саме, опор 17), щоб не було хитання гідропідйомника (позиція 17). Таким чином, силову раму 1 установлюють у вертикальній та горизонтальній площинах так, щоб при повністю прибраних штоках 23 силозбуджувачів 5 між наконечниками 6 і поверхнею крила 24 залишався зазор 5, наприклад, у декілька сантиметрів (1…2 см). Після цього кронштейни 3 (з закріпленими на них індикаторами 4 лінійних переміщень) установлюють на силовій рамі 1 таким чином, щоб індикатори 4 лінійних переміщень своїм контактним елементом 29 торкалися поверхні крила 24 (у крайніх точках хорди "b" зазначеного крила 24) - див. схеми на Фіг. 1-2, 9). У системі виміру лінійних переміщень як пристрій виміру лінійних переміщень використовують або зазначений вище індикатор 4 лінійних переміщень годинникового типу, або електронний чи електронно-механічний пристрій (31) будь-якого типу, що вимірює лінійні переміщення в поточний момент часу, при цьому при застосуванні зазначеного електронного чи електронно-механічного пристрою (31), що вимірює лінійні переміщення в поточний момент часу, додатково встановлюють систему 32 зчитування та відображення інформації, зв'язану із зазначеним електронним пристроєм чи електронно-механічним пристроєм (31) каналом "Ki" передачі інформації (див. блок-схему на Фiг. 13). 3 UA 74759 U 5 10 15 20 25 30 35 40 45 50 55 60 У даному положенні зазначені кронштейни 3 за допомогою елементів 21 кріплення (які вводяться в отвори 20, що виконано на силовій рамі 1) кріпляться до силової рами 1. При цьому на шкалі індикаторів 4 лінійних переміщень установлюють "нуль". Далі від гідронасоса 12 по трубопроводах 15 з бака 13 подають гідравлічну рідину під тиском до силозбуджувача 5, який висуває свій шток 23 та через наконечник 6 починає навантажувати крило 24 силою Р (див. схеми на Фіг. 7-8), здійснюючи вигин і переміщення перетину крила 24 (в якому встановлено силову раму 1) у вертикальній площині. Тиск в системі 8 живлення силозбуджувача 5 перевіряють по манометру 10. Наконечник 6 (який виконано у вигляді мініатюрного пневматика чи цільногумового колеса див. Фіг. 15) здійснює передачу зусилля Р не в точці, а через деяку опорну поверхню (площиною S), що запобігає місцевим ушкодженням поверхні крила 24 від навантаження (запобігає продавлюванню обшивки крила 24) - див. схеми на Фіг. 7-9. Створивши задане навантаження Р, вимірюють лінійні переміщення h1 і h2 індикаторами 4 лінійних переміщень (в точках "А" і "Б") і порівнюють їх (h1>h2, h1hh2) - див. схему на Фiг. 10 (або вимір здійснюють іншими типами пристроїв виміру лінійних переміщень). Потім вводять (за допомогою блока 7 керування і відповідних перекривних кранів 11) в дію гідроциліндр 9, який своїм штоком 30 переміщує (At) силову платформу 2 уздовж силової рами 1 (а також уздовж контуру перетину крила 24). При цьому наконечник 6, навантажуючи крило 24 силою Р, котиться по нижній поверхні зазначеного крила 24, змінюючи положення точки "О" " додатка навантаження Р (до положення точки "О’ ) (див., відповідно, схеми на Фіг. 9 та схеми на Фіг. 10-12). При цьому вимірюють лінійні переміщення h1 і h2 індикаторами 4 лінійних переміщень (в точках "А" і "Б") і порівнюють їх - див. схеми на Фіг. 10-12. Платформу 2 (за допомогою штоку 30 гідроциліндра 9) переміщують (l) до того моменту, доки змінені величини лінійних переміщень h1 і h2 не зрівняються (h1=h2, h1=h=h2) відбудеться "чистий вигин" крила (див. схеми на Фіг. 9 та на Фіг. 11). Положення наконечника 6 силозбуджувача 5, при якому показання індикаторів 4 лінійних переміщень будуть рівні (hi=h2, відповідно, в точках "А" i "Б"), і визначить координату - абсцису центра жорсткості (позиція "ЦЖ" - точка "О") крила 24 в даному перетині. Отриману координату ("О") центра жорсткості (позиція "ЦЖ") крила 24 в даному перетині (яка знаходиться в геометричному центрі опорної поверхні (площиною S), що створена обтисненням наконечника 6, який виконано, як варіант конструктивного виконання, у вигляді мініатюрного пневматика чи цільногумового колеса), помічають на нижній поверхні крила 24 (це являє собою проекцію центра жорсткості (позиція "ЦЖ") перетину крила 24 на нижню поверхню зазначеного крила). Для перевірки того, що визначена точка є координатою ("О") центра жорсткості (позиція "ЦЖ") крила 24 в даному перетині, далі переміщують (АІ) шток 30 гідроциліндра 9 у бік хвостовика профілю крила і заміряють за допомогою індикаторів 4 лінійних переміщень (в точках "А" і "Б") лінійні переміщення hi носка крила 24 та лінійні переміщення h2 хвостовика профілю крила 24, порівнюючи їх (див. схему на Фіг. 12). Якщо відбудеться зміна показників індикаторів 4 лінійних переміщень (в точках "А" і "Б") на збільшення лінійних переміщень (в точках "А" і "Б", відповідно, h1
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for investigation of elastic properties of cantilever fitted constructions of an aircraft
Автори англійськоюKomarov Volodymyr Oleksandrovych, Rasstryhin Oleksandr Oleksiiovych, Bashynskyi Volodymyr Hryhorovych, Kuznetsov Vladlen Oleksandrovych, Arkhypov Mykola Ivanovych, Hudyma Oleh Petrovych, Hordiievskyi Oleksii Tykhonovych, Tkachenko Volodymyr Anatoliiovych, Halushka Volodymyr Ivanovych
Назва патенту російськоюУстройство для исследования упругих свойств консольно закрепленных конструкций самолета
Автори російськоюКомаров Владимир Александрович, Расстригин Александр Алексеевич, Башинский Владимир Григорьевич, Кузнецов Владлен Александрович, Архипов Николай Иванович, Гудима Олег Петрович, Гордиевский Алексей Тихонович, Ткаченко Владимир Анатольевич, Галушка Владимир Иванович
МПК / Мітки
МПК: G01M 5/00
Мітки: дослідження, пристрій, консольної, властивостей, пружних, літака, конструкцій, закріплених
Код посилання
<a href="https://ua.patents.su/18-74759-pristrijj-dlya-doslidzhennya-pruzhnikh-vlastivostejj-konsolno-zakriplenikh-konstrukcijj-litaka.html" target="_blank" rel="follow" title="База патентів України">Пристрій для дослідження пружних властивостей консольно закріплених конструкцій літака</a>
Спосіб дослідження пружних властивостей консольно закріплених авіаційних конструкцій
Номер патенту: 62473
Опубліковано: 15.12.2003
Автори: Дихановський Віктор Миколайович, Юзвенко Андрій Іванович, Шпаківський Юрій Олегович, Мосов Сергій Петрович, Хижняк Володимир Віталійович, Зайківський Олександр Болеславович, Сапелюк Євген Антонович, Комаров Володимир Сергійович, Журавльова Лариса Андріївна, Комаров Володимир Олександрович, Анохін Олександр Олексійович
МПК: G01M 5/00
Мітки: конструкцій, дослідження, спосіб, консольної, властивостей, закріплених, авіаційних, пружних
Формула / Реферат:
Спосіб дослідження пружних властивостей консольно закріплених авіаційних конструкцій, який полягає в додатку до конструкції навантажуючої сили і вимірі лінійних переміщень у кожному досліджуваному поперечному перерізі згаданої конструкції в точках її поверхні, що лежать на одній прямій, паралельній лінії дії зазначеної навантажуючої сили, який відрізняється тим, що навантажуючу силу прикладають до конструкції, безупинно переміщуючи її уздовж...
Пристрій для дослідження пружних властивостей авіаційних конструкцій
Номер патенту: 7683
Опубліковано: 15.07.2005
Автори: Мосов Сергій Петрович, Комаров Володимир Олексадрович, Микитюк Олександр Григорович
МПК: G01M 5/00
Мітки: властивостей, авіаційних, пружних, пристрій, дослідження, конструкцій
Формула / Реферат:
Пристрій для дослідження пружних властивостей авіаційних конструкцій, наприклад, крила літального апарата, що містить платформу із силозбуджувачем, установленим на силовій рамі з можливістю переміщення уздовж неї, і індикатор лінійних переміщень, при цьому силозбуджувач оснащений наконечником, який відрізняється тим, що він оснащений додатковим індикатором лінійних переміщень, кронштейнами для кріплення зазначених індикаторів лінійних...
Спосіб визначення пружних властивостей авіаційних конструкцій
Номер патенту: 60847
Опубліковано: 15.10.2003
Автори: Гудовських Вадим Вікторович, Комаров Володимир Сергійович, Комаров Володимир Олександрович, Шпаківський Юрій Олегович, Зайківський Олександр Болеславович, Юзвенко Андрій Іванович, Хижняк Володимир Віталійович, Мосов Сергій Петрович
Мітки: конструкцій, властивостей, спосіб, пружних, авіаційних, визначення
Формула / Реферат:
Спосіб визначення пружних властивостей авіаційних конструкцій, що полягає в навантаженні конструкції шляхом збудження у ній коливань і виміру амплітуд вібропереміщень, який відрізняється тим, що на конструкції закріплюють силопередавальний важіль і збуджують крутильні коливання шляхом прикладання до його закінцівок пари сил періодично змінного знака, вимірюють амплітуди вібропереміщень закінцівок, а точку, що відповідає координаті проекції...
Спосіб дослідження пружних властивостей порожнистого біологічного об’єкту
Номер патенту: 34061
Опубліковано: 15.02.2001
Автори: Кір'якулов Георгій Степанович, Зенін Олег Костянтинович, Цитрін Анатолій Григорович, Резніченко Володимир Іванович
МПК: A61B 10/00, G01N 19/00
Мітки: об'єкту, властивостей, спосіб, дослідження, пружних, біологічного, порожнистого
Текст:
...пружних та до початку пластичних деформацій. Показник пружності розраховують за формулою: l/E=Vo 1/3/ P(V1/3 -Vo 1/3) (3), де: Е - показник пружності, Р - тиск в порожнині досліджуваного біооб'єкту у момент появи сигналів АЕ, V - об'єм порожнини досліджуваного біооб'єкту у момент появи сигналів АЕ, V0 - початковий об'єм порожнини досліджуваного біооб'єкту. Приклад 1. Дослідження пружних властивостей лівого шлуночка серця щура. На...
Пристрій для вимірювання пружних властивостей виробів, що розширюються або стискуються в радіальних напрямках
Номер патенту: 9856
Опубліковано: 17.10.2005
Автори: Аксенко Олександр Олександрович, Шеханін Василь Єгорович, Калашнікова Юлія Валентинівна, Володось Микола Леонтіїйович
Мітки: стискуються, пружних, напрямках, вимірювання, властивостей, пристрій, виробів, радіальних, розширюються
Формула / Реферат:
Пристрій для вимірювання пружних властивостей виробів, що розширюються або стискуються в радіальних напрямках, що містить плиту, згорнуту у коло, і розташовану в трубчастій опорі стяжну стрічку, один кінець якої закріплений до плити, а другий з'єднаний з приладом визначення зусилля пружності виробу, розташованим на каретці, який відрізняється тим, що стрічка виконана у вигляді розширеної і звуженої ділянок, на розширеній ділянці виконаний...
Попередній патент: Гідролітак
Наступний патент: Різальний інструмент
Випадковий патент: Спосіб обробки лівої внутрішньої грудної артерії при хірургічному лікуванні ішемічної хвороби серця