Система управління роликом для безступеневої передачі та безступенева передача
Номер патенту: 40564
Опубліковано: 15.08.2001
Автори: Грінвуд Крістофер Джон, Феллоуз Томас Джордж, Уінтер Філіп Дункан
Формула / Реферат
1. Система управления роликом в бесступенчатой передаче (БСП) типа сцепления по тороидальной канавке качения, включающая узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, при этом указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, выполненными с возможностью коаксиального вращения и представляющими входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-поступательного перемещения в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта несущей конструкции с управляющим механизмом, отличающаяся тем, что положение центра ролика вдоль оси ролика является фиксированным, при этом узел ролика установлен з возможностью вращения вокруг более, чем одной оси относительно неподвижных частей управляющего механизма.
2. Система управления роликом по п. 1, отличающаяся тем, что контакт между управляющим механизмом и узлом ролика образован при помощи шарового соединения или подобного элемента, обеспечивающего их взаимное вращение вокруг более, чем одной оси.
3. Система управления роликом по п. 1, отличающаяся тем, что управляющий механизм выполнен в виде поршня с возможностью перемещения внутри цилиндра.
4. Система управления роликом по п. 3, отличающаяся тем, что комбинация поршень-цилиндр является комбинацией двойного действия.
5. Система управления роликом по п. 3, отличающаяся тем, что комбинация поршень-цилиндр является комбинацией одинарного действия, обладающей способностью к приложению силы в первом направлении, причем предусмотрены также второй поршень и цилиндр, обладающие способностью к приложению силы во втором направлении, противоположном первому.
6. Система управления роликом по п. 3, отличающаяся тем, что поршень выполнен гибким с возможностью отклонения центра поршня от оси цилиндра.
7. Система управления роликом по п. 3, отличающаяся тем, что относительное вращение между поршнем и цилиндром имеет место только вокруг оси цилиндра, а контакт между узлом ролика и управляющим механизмом обеспечивается за счет дополнительного соединения, обеспечивающего вращение вокруг других осей.
8. Система управления роликом по п. 1, отличающаяся тем, что управляющий механизм расположен только с одной стороны плоскости, проходящей через основную ось БСП и центр ролика.
9. Система управления роликом по п. 1, отличающаяся тем, что управляющий механизм включает комбинацию поршень-цилиндр одинарного действия, включающую первый поршень, выполненный с возможностью перемещения в первом цилиндре и приложения силы в первом направлении, причем управляющий механизм также включает второй поршень и цилиндр, выполненные с возможностью приложения силы во втором противоположном направлении, при этом указанный второй поршень и несущая конструкция являются раздельными компонентами, которые упираются один в другой без взаимной блокировки.
10. Система управления роликом по п. 1, отличающаяся тем, что включает комбинацию поршень-гидроцилиндр, которая выполнена с возможностью приложения управляющей силы на несущую конструкцию, причем в цилиндре выполнен канал, посредством которого цилиндр имеет возможность сообщаться с гидравлической цепью, при этом поперечное сечение канала в основном совпадает с поперечным сечением корпуса гидроцилиндра.
11. Система управления роликом по п. 1, отличающаяся тем, что управляющий механизм включает гидравлическую цепь и по меньшей мере одну комбинацию поршень-гидроцилиндр, связанную с гидравлической цепью, причем связь между гидроцилиндром и цепью является таковой что приближение поршня к концу своего рабочего хода сигнализирует о состоянии перегрузки или другой аварийной ситуации для системы, при этом цепь перекрывается, что вызывает повышение давления рабочей жидкости выше по потоку и препятствует выходу поршня за рабочее отверстие цилиндра.
12. Бесступенчатая передача по типу сцепления по тороидальной канавке качения, содержащая систему управления роликом, включающую узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, причем указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, обладающими способностью коаксиального вращения и вхождения в входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-поступательного перемещения вдоль оси неподвижной части в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта с управляющим механизмом, отличающаяся тем, что положение центра ролика вдоль оси ролика является фиксированным, при этом узел ролика установлен з возможностью вращения вокруг более, чем одной оси относительно неподвижных частей управляющего механизма.
13. Бесступенчатая передача по типу сцепления по тороидальной канавке качения по п. 12, отличающаяся тем, что она содержит неподвижный корпус, а по меньшей мере часть управляющего механизма установлена на указанном неподвижном корпусе.
14. Бесступенчатая передача по типу сцепления по тороидальной канавке качения по п. 12, отличающаяся тем, что система управления роликом включает комбинацию поршень-гидроцилиндр, которая выполнена с возможностью приложения управляющей силы на несущую конструкцию, причем в цилиндре образован канал, посредством которого цилиндр сообщается с гидравлической цепью, при этом поперечное сечение канала в основном совпадает с поперечным сечением корпуса гидроцилиндра, а гидравлическая цепь включает канал кольцеобразной формы, образованный внутри корпуса бесступенчатой передачи и коаксиальный с основной осью бесступенчатой передачи.
15. Бесступенчатая передача по типу сцепления по тороидальной канавке качения по п. 14, отличающаяся тем, что канал имеет форму незавершенного кольца, причем разрыв в кольце обеспечивает доступ в корпус бесступенчатой передачи для других компонентов.
Текст
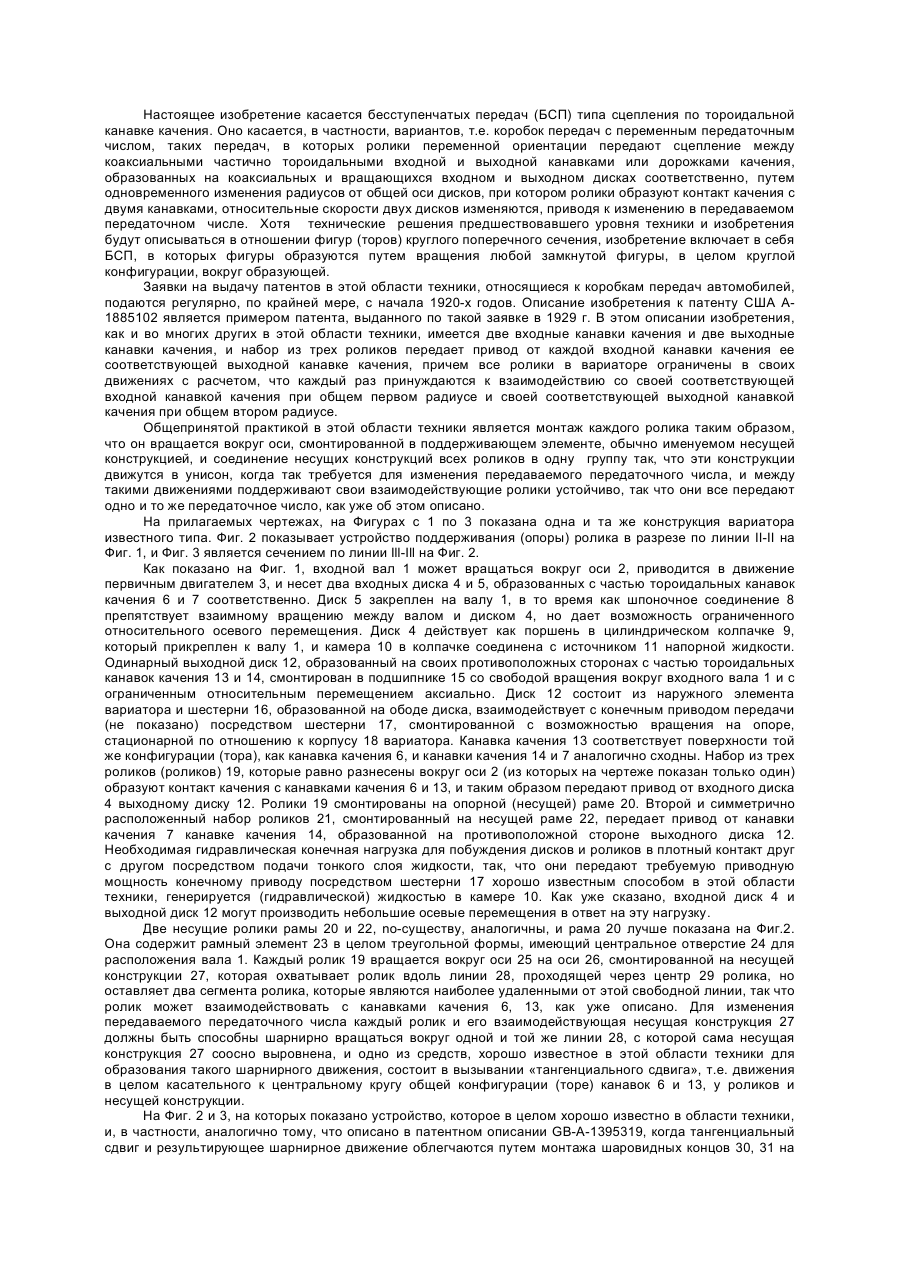
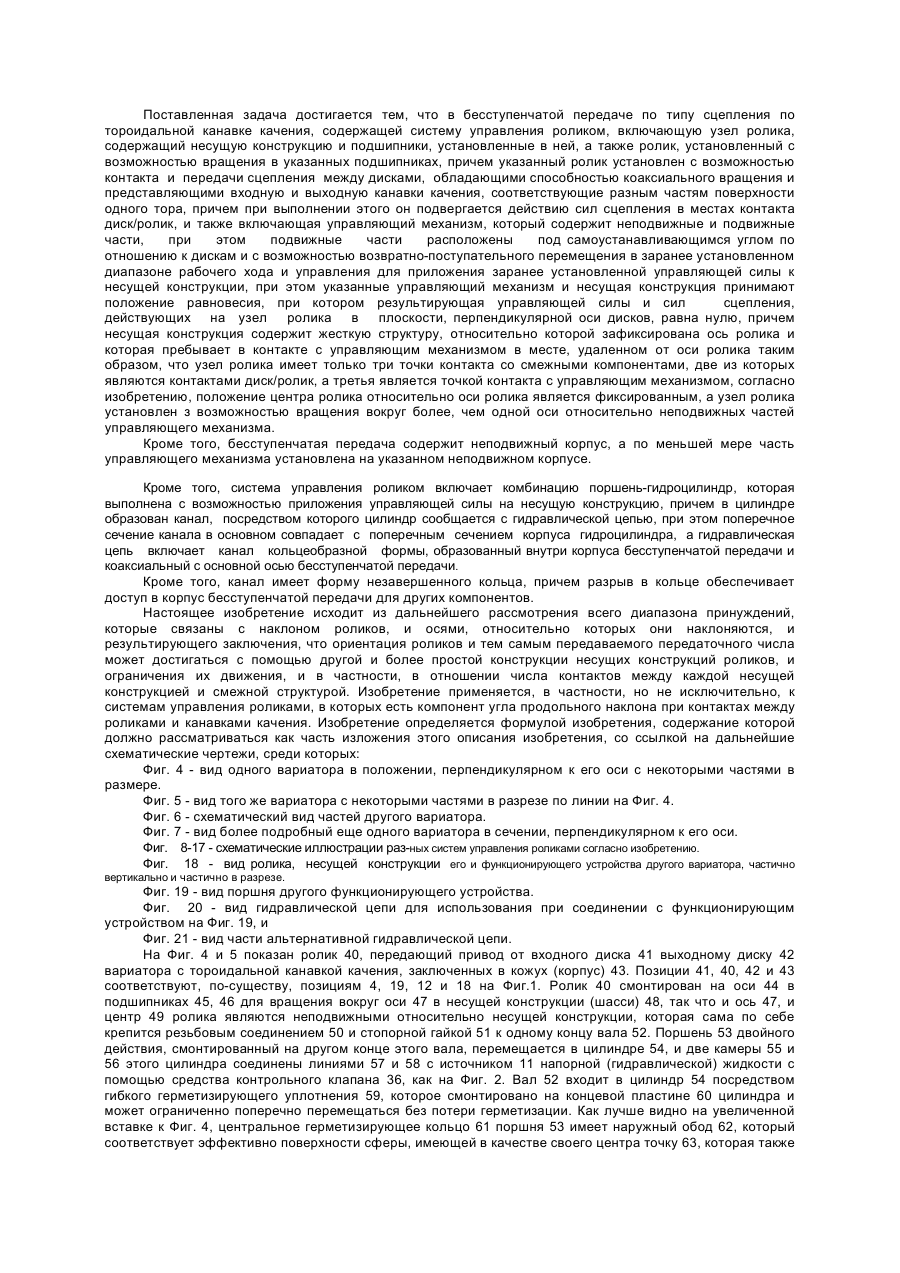
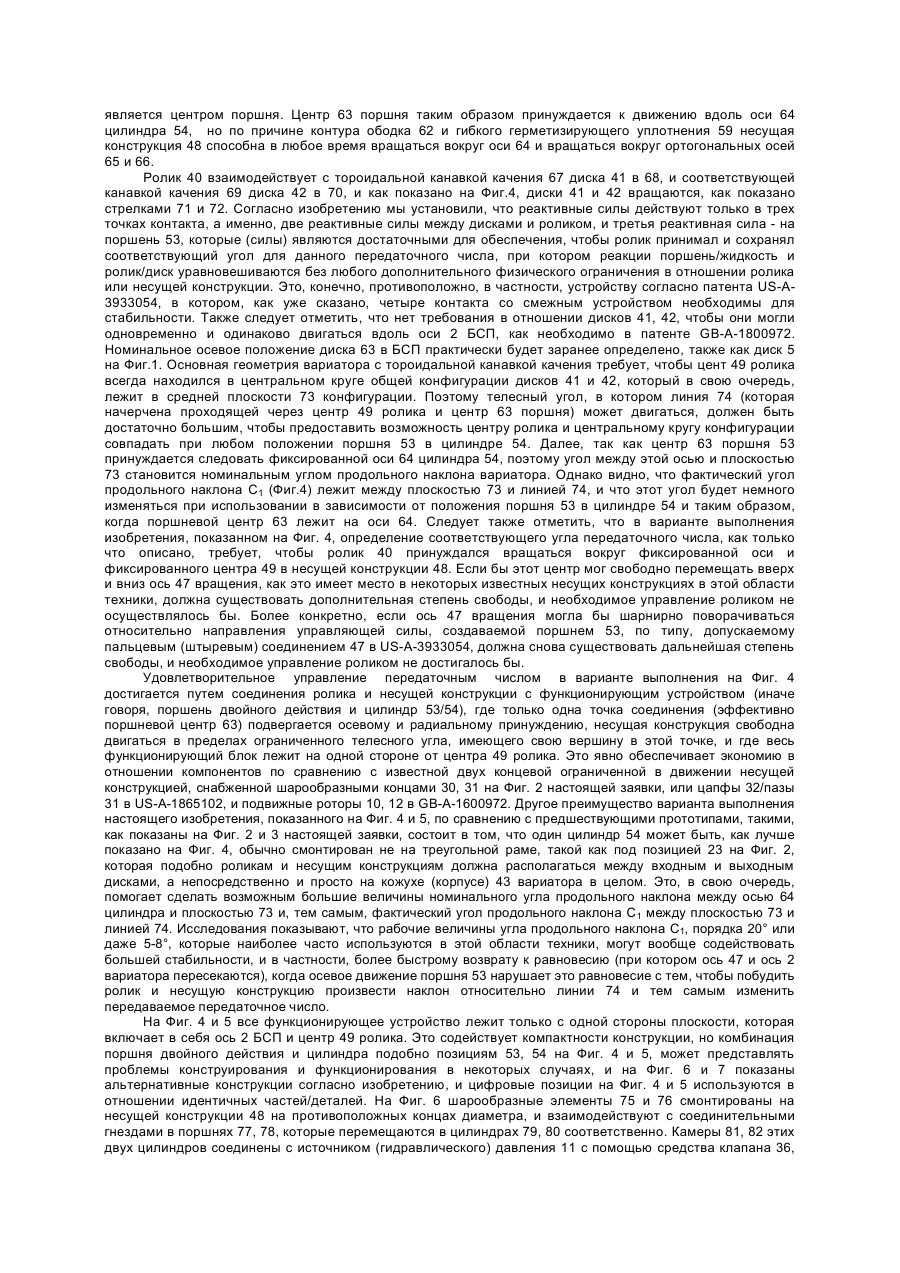
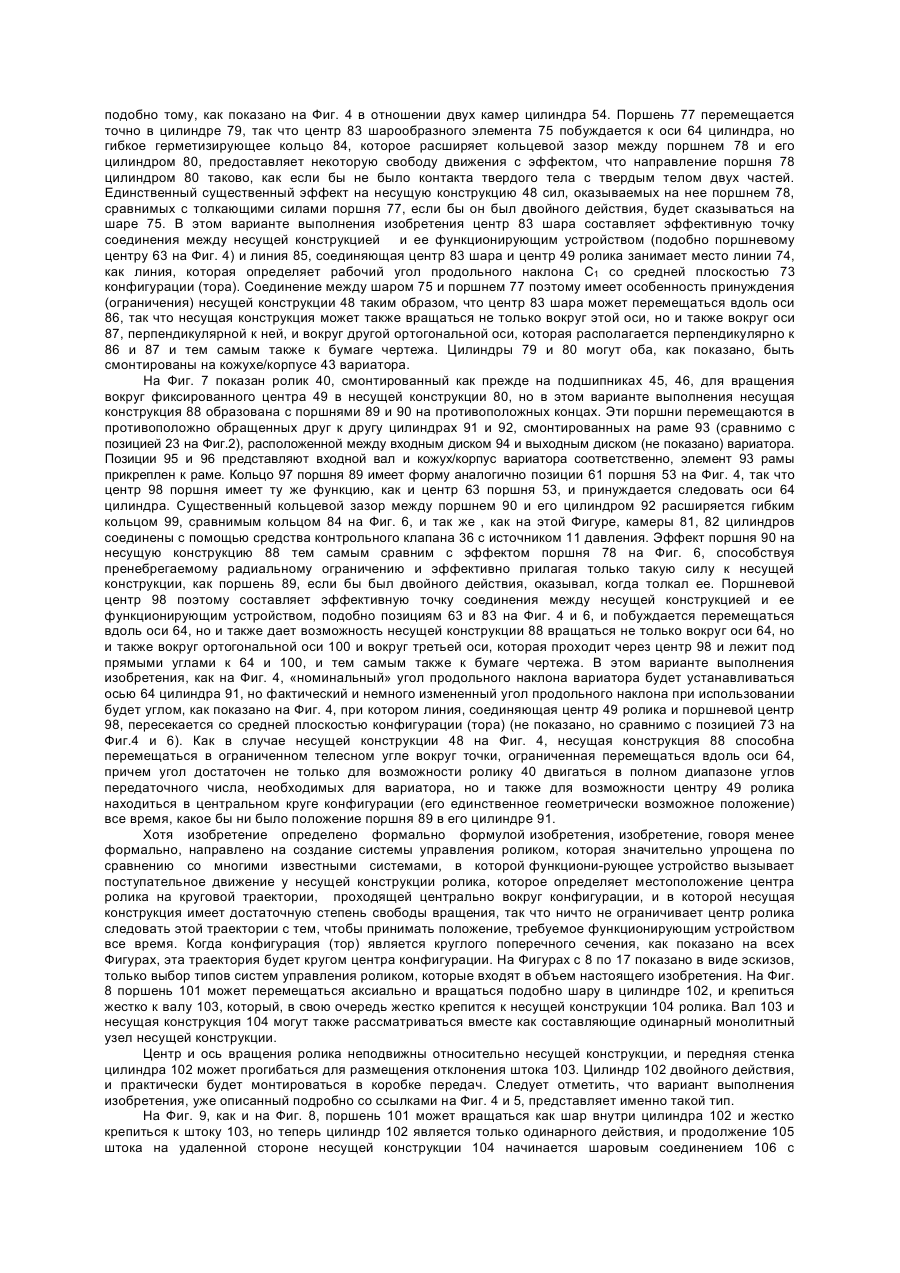
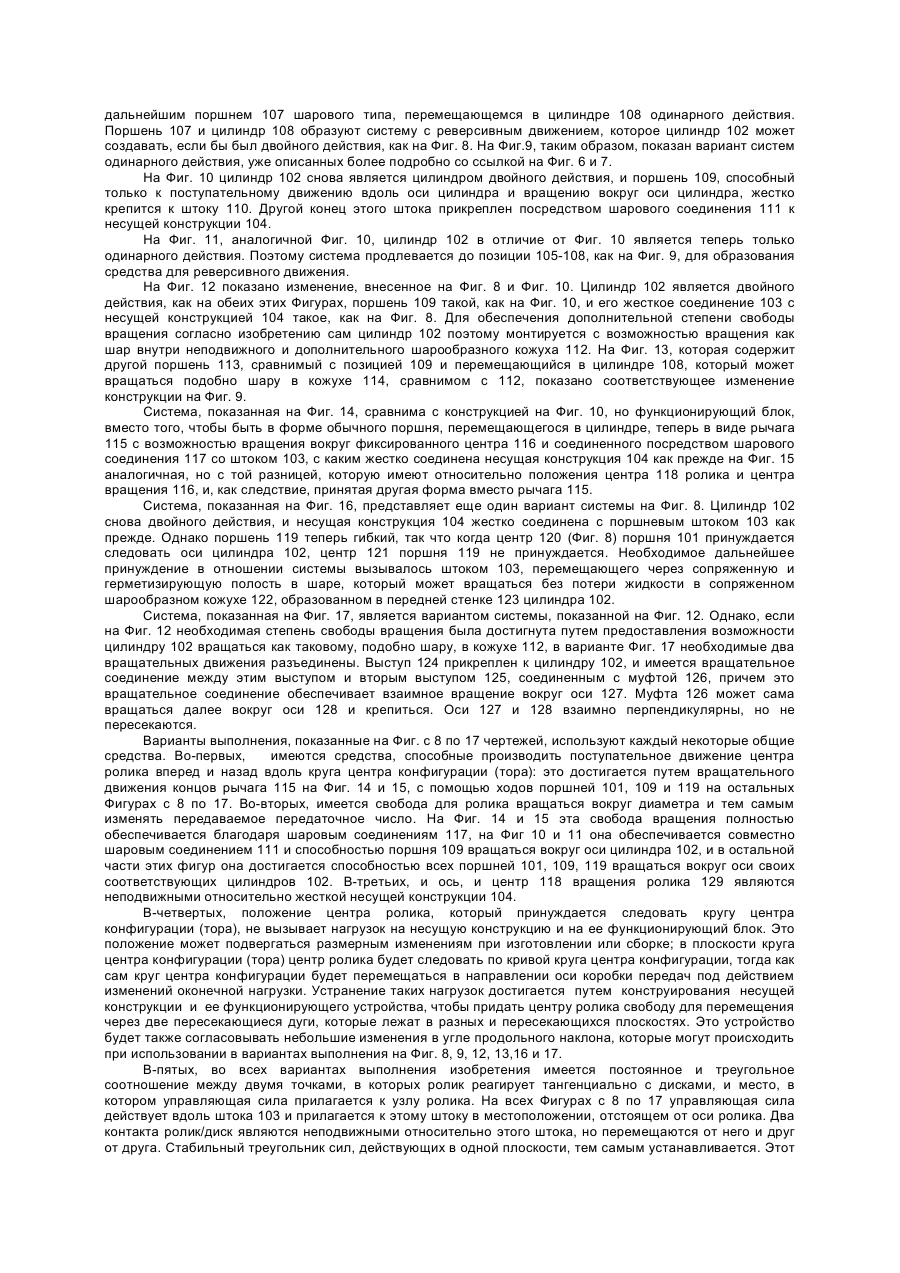
Настоящее изобретение касается бесступенчатых передач (БСП) типа сцепления по тороидальной канавке качения. Оно касается, в частности, вариантов, т.е. коробок передач с переменным передаточным числом, таких передач, в которых ролики переменной ориентации передают сцепление между коаксиальными частично тороидальными входной и выходной канавками или дорожками качения, образованных на коаксиальных и вращающихся входном и выходном дисках соответственно, путем одновременного изменения радиусов от общей оси дисков, при котором ролики образуют контакт качения с двумя канавками, относительные скорости двух дисков изменяются, приводя к изменению в передаваемом передаточном числе. Хотя технические решения предшествовавшего уровня техники и изобретения будут описываться в отношении фигур (торов) круглого поперечного сечения, изобретение включает в себя БСП, в которых фигуры образуются путем вращения любой замкнутой фигуры, в целом круглой конфигурации, вокруг образующей. Заявки на выдачу патентов в этой области техники, относящиеся к коробкам передач автомобилей, подаются регулярно, по крайней мере, с начала 1920-х годов. Описание изобретения к патенту США А1885102 является примером патента, выданного по такой заявке в 1929 г. В этом описании изобретения, как и во многих других в этой области техники, имеется две входные канавки качения и две выходные канавки качения, и набор из трех роликов передает привод от каждой входной канавки качения ее соответствующей выходной канавке качения, причем все ролики в вариаторе ограничены в своих движениях с расчетом, что каждый раз принуждаются к взаимодействию со своей соответствующей входной канавкой качения при общем первом радиусе и своей соответствующей выходной канавкой качения при общем втором радиусе. Общепринятой практикой в этой области техники является монтаж каждого ролика таким образом, что он вращается вокруг оси, смонтированной в поддерживающем элементе, обычно именуемом несущей конструкцией, и соединение несущих конструкций всех роликов в одну группу так, что эти конструкции движутся в унисон, когда так требуется для изменения передаваемого передаточного числа, и между такими движениями поддерживают свои взаимодействующие ролики устойчиво, так что они все передают одно и то же передаточное число, как уже об этом описано. На прилагаемых чертежах, на Фигурах с 1 по 3 показана одна и та же конструкция вариатора известного типа. Фиг. 2 показывает устройство поддерживания (опоры) ролика в разрезе по линии II-II на Фиг. 1, и Фиг. 3 является сечением по линии Ill-Ill на Фиг. 2. Как показано на Фиг. 1, входной вал 1 может вращаться вокруг оси 2, приводится в движение первичным двигателем 3, и несет два входных диска 4 и 5, образованных с частью тороидальных канавок качения 6 и 7 соответственно. Диск 5 закреплен на валу 1, в то время как шпоночное соединение 8 препятствует взаимному вращению между валом и диском 4, но дает возможность ограниченного относительного осевого перемещения. Диск 4 действует как поршень в цилиндрическом колпачке 9, который прикреплен к валу 1, и камера 10 в колпачке соединена с источником 11 напорной жидкости. Одинарный выходной диск 12, образованный на своих противоположных сторонах с частью тороидальных канавок качения 13 и 14, смонтирован в подшипнике 15 со свободой вращения вокруг входного вала 1 и с ограниченным относительным перемещением аксиально. Диск 12 состоит из наружного элемента вариатора и шестерни 16, образованной на ободе диска, взаимодействует с конечным приводом передачи (не показано) посредством шестерни 17, смонтированной с возможностью вращения на опоре, стационарной по отношению к корпусу 18 вариатора. Канавка качения 13 соответствует поверхности той же конфигурации (тора), как канавка качения 6, и канавки качения 14 и 7 аналогично сходны. Набор из трех роликов (роликов) 19, которые равно разнесены вокруг оси 2 (из которых на чертеже показан только один) образуют контакт качения с канавками качения 6 и 13, и таким образом передают привод от входного диска 4 выходному диску 12. Ролики 19 смонтированы на опорной (несущей) раме 20. Второй и симметрично расположенный набор роликов 21, смонтированный на несущей раме 22, передает привод от канавки качения 7 канавке качения 14, образованной на противоположной стороне выходного диска 12. Необходимая гидравлическая конечная нагрузка для побуждения дисков и роликов в плотный контакт друг с другом посредством подачи тонкого слоя жидкости, так, что они передают требуемую приводную мощность конечному приводу посредством шестерни 17 хорошо известным способом в этой области техники, генерируется (гидравлической) жидкостью в камере 10. Как уже сказано, входной диск 4 и выходной диск 12 могут производить небольшие осевые перемещения в ответ на эту нагрузку. Две несущие ролики рамы 20 и 22, no-существу, аналогичны, и рама 20 лучше показана на Фиг.2. Она содержит рамный элемент 23 в целом треугольной формы, имеющий центральное отверстие 24 для расположения вала 1. Каждый ролик 19 вращается вокруг оси 25 на оси 26, смонтированной на несущей конструкции 27, которая охватывает ролик вдоль линии 28, проходящей через центр 29 ролика, но оставляет два сегмента ролика, которые являются наиболее удаленными от этой свободной линии, так что ролик может взаимодействовать с канавками качения 6, 13, как уже описано. Для изменения передаваемого передаточного числа каждый ролик и его взаимодействующая несущая конструкция 27 должны быть способны шарнирно вращаться вокруг одной и той же линии 28, с которой сама несущая конструкция 27 соосно выровнена, и одно из средств, хорошо известное в этой области техники для образования такого шарнирного движения, состоит в вызывании «тангенциального сдвига», т.е. движения в целом касательного к центральному кругу общей конфигурации (торе) канавок 6 и 13, у роликов и несущей конструкции. На Фиг. 2 и 3, на которых показано устройство, которое в целом хорошо известно в области техники, и, в частности, аналогично тому, что описано в патентном описании GB-A-1395319, когда тангенциальный сдвиг и результирующее шарнирное движение облегчаются путем монтажа шаровидных концов 30, 31 на противоположных оконечностях несущей конструкции 27, причем два шаровых центра лежат оба на линии 28. Конец 30 перемещается в цилиндрическом гнезде 33, смонтированном на рамном элементе 23, тогда как конец 31 помещается в шарообразном гнезде, образованном в поршне 33, который помещается в цилиндре 34, также смонтированном на рамном элементе 23. Камера 35 цилиндра 34 соединена с помощью средства контрольного клапана 36 с тем же источником 11 напорной жидкости, который питает камеру 10 конечной нагрузки. Путем использования клапана 36 для измерения давления жидкости в камере 35, поршень 33 придает тангенциальный сдвиг несущей конструкции 27. Как уже упомянуто, эти движения будут иметь эффект принуждения несущей конструкции и ее ролика 19 смещаться (отклоняться) относительно линии 28 и тем самым изменять передаваемое передаточное число. Центр 29 каждого ролика 19 должен все время находиться в центральном круге воображаемой конфигурации (тора), которой соответствуют поверхности канавок качения 6 и 13, и когда блок передаточного числа находится в равновесии, т.е. когда передаваемое передаточное число является постоянным в течение данного времени, ось вращения 25 каждого ролика пересекается с осью 2 вариатора. Чтобы это изменение передаточного числа соответствовало комбинации компонентов тангенциального сдвига и вращения, как только что описано, необходимо дальнейшее геометрическое средство, которое показано на Фиг. 3. Это средство состоит в том, что когда центр 29 ролика лежит в центральной плоскости 37 воображаемой конфигурации (тора) все время, шаровидный конец 30 лежит на одной стороне этой плоскости, а шаровидный конец 31 - на другой стороне, так что линия 28 наклонена относительно плоскости 37 под углом С, известном в области техники как угол продольного наклона. Эффект этого угла можно объяснить следующим образом. Если диски 4, 12 вращаются как указано стрелками 38 и 39, передача крутящего момента роликами 19 между канавками 6 и 13 производит реактивный крутящий момент на каждую несущую конструкцию 27 ролика, побуждая взаимодействующий поршень 33 в его цилиндр 34. Для того, чтобы передача была в равновесии, необходимо выполнить два условия. Во-первых, ось вращения 25 каждого ролика должна пересекать ось 2 вариатора. Во-вторых, сила, оказываемая на поршень 33 жидкостью в цилиндре 34, должна быть равна и противоположна силе, которую реактивный крутящий момент оказывает на несущую конструкцию ролика, причем обе силы измеряются в плоскости, перпендикулярной к оси 2 вариатора. Если давление жидкости в цилиндре 34 увеличивается, перемещая поршень 33 вниз (как показано на Фиг. 3) против направления реактивного крутящего момента дисков/ролика, равновесие нарушается, потому что силы в цилиндре и реактивного крутящего момента больше не в равновесии. Ось 25 ролика поэтому больше не будет пересекать ось 2 вариатора. В результате управляющая сила воздействует на ролик со стороны дисков 4 и 12 с тем, чтобы наклонить несущую конструкцию 27 относительно линии 28, пока не будет восстановлено равновесие, когда силы в цилиндре и реактивного крутящего момента снова не сбалансируются, и когда ось 25 будет снова пересекать ось 2, причем степень наклона или сдвига (которая пропорциональна результирующему изменению в передаваемом передаточном числе) зависит от размера начального тангенциального перемещения или сдвига и угла продольного наклона. Тангенциальный сдвиг в противоположном направлении, который показан в известном вариаторе на Фиг. 3, будет достигнут путем снижения давления жидкости в цилиндре 34, что приведет к сдвигу ролика в противоположном направлении. Основное отличие вариаторов типа, который только что кратко описан выше и подробно изложен в патентном описании GB-A-1395319, например, состоит в том, что они являются типом «равновесия сил». Иначе говоря, одно из условий, которое должно быть выполнено, для сбалансирования передачи при любой данной величине передаточного числа, состоит в том, что сила реактивного крутящего момента и гидравлическая сила, действующая на поршень несущей конструкции, должны быть в равновесии. Если одна из этих сил изменяется, равновесие утрачивается пока силы снова не будут приведены в равновесие. Этот отличительный признак отличает передачи, показанные в GB-A-1395319 и передачи согласно настоящему изобретению также, от типа, в котором ролик и несущая конструкция устанавливаются с помощью механических средств, которые сами по себе не реагируют на силы реактивного крутящего момента, которым затем подвергаются ролики и несущие конструкции после того, как были установлены. В описании US-A-2130314 описывается механическая установочная система такого типа, в которой один конец несущей конструкции ролика соединяется посредством соединения типа шара-и-сферического гнезда с управляющей шестерней. Передаваемое передаточное число изменяется путем поворота шестерни, тем самым изменяя ориентацию несущей конструкции путем изменения места ее точки соединения с шестерней. Однако, соединение несущей конструкции/шестерни таково, что реактивный крутящий момент, испытываемый границами раздела диск/ролик через несущую конструкцию, действует на шестерню в направлении, по-существу, параллельном ее оси вращения. Поэтому полезного уравновешивания между силой реактивного крутящего момента и силой, приложенной к шестерне для поворачивания ее, не достигается, и поэтому должно быть найдено другое средство вместо равновесия сил для обеспечения того, чтобы шестерня всегда принимала положение вращения, при котором ролик передает передаточное число, требуемое мгновенным преобладающим усилием. В известном устройстве типа равновесия сил, показанном на Фиг. 2 и 3, шарообразные концы 30, 31 могут перемещаться аксиально и одновременно в своих соответствующих цилиндрах, так что линия 28 движется непосредственно, и каждая несущая конструкция 27 может вращаться вокруг мгновенного положения линии 28. Однако, так как несущая конструкция располагается на обоих концах, у нее нет свободы для вращения вокруг любой другой оси. На Фиг. 4 чертежей патентного описания GB-A-1600972 (эквивалентно US-A-4281559) показан другой вариант известного устройства, в котором несущая конструкция (88) ролика крепится с головкой (82) одного поршня, с помощью которого управляется положение ролика (13). Как и в случае только что описанных двух известных устройств эта несущая конструкция способна подвергаться переходному движению вдоль линии (оси движения головки 82 поршня) и вращению вокруг этой линии, но не имеет свободы для вращения вокруг любой другой оси. Следует также отметить, что в БСП, показанном на Фиг. 4 патента GB-A-1600972, два ротора 10,12, между которыми ролик 13 передает сцепление, сами должны быть способны одновременно и одинаково двигаться в направлении, параллельном основной оси БСП, чтобы согласовать перемещения ролика 13 поршнем 82; требование в отношении такого движения роторов естественно вводит дальнейшую сложность и затрат на БСП в целом. Другая известная конструкция БСП типа равновесия сил показана и описана в патентном описании US-A-3933054, в котором силы сцепления, испытываемые каждым роликом (40-42 на чертежах) уравновешиваются гидравлической силой, действующей на поршень 66. В отношении того, как синхронизировать это равновесие сил при требуемой величине передаваемого передаточного числа, техническое решение согласно US-A-3933054 является ясным. Каждая несущая конструкция ролика соединяется с помощью шарнирного соединения (палец 47) с устройством, на котором смонтирован поршень (66). Несущая конструкция также несет кулачковый следящий элемент (50), который взаимодействует с кулачковым пазом (70), прикрепленный к корпусу коробки передач. Как уже описано выше, при описании фигур с 1 по 3, должны быть выполнены два условия, если передача этого типа должна быть в равновесии. Поэтому, когда передача согласно патенту US-A-3988054 выходит из равновесия, должно происходить два связанных, но различных движения, чтобы восстановить равновесие. Во-первых, происходит вообще осевое движение каждого поршня (66) в своем цилиндре (65), пока новый реактивный крутящий момент на границах раздела диск/ролик не сбалансирует новую гидравлическую силу, оказываемую на поршень внутри цилиндра. Во-вторых, угол наклона ролика (40-42) должен изменяться, пока ось ролика снова не будет пересекаться с осью привода (Д) передачи. В патентном описании US-A-3933054 сказано, что взаимодействие паз/следящий элемент (70/50) является важным для достижения этого второго движения. В ответ на первое движение поршня следящий элемент (50) принуждается двигаться вдоль паза (70), тем самым изменяя угол наклона ролика (40-42) и также передаваемое передаточное число. Это требует и шарнирного поворота в шарнирном соединении (47), и вращения поршня (66) вокруг его оси в своем цилиндре (65). Теперь ось шарнирного соединения (47) пересекается в двух точках контакта ролика (47) канавками (30, 31) диска, без взаимодействия следящего элемента (50) и паза (70), как сказано в патентном описании US-A-3933054, и угол наклона каждого ролика (40-42) в ответ на любую утрату равновесия передачи, будет промежуточным. Поэтому, как сказано в патентном описании US-A-3933054 для эффективного функционирования каждого узла несущей конструкции и ролика требуется четыре точки контакта со смежным устройством, именно, контакта между роликом и канавками, между которыми происходит сцепление передачи, контакт с гидравлически функционирующим устройством через шарнир (47) и контакт следящего элемента/паза. Наиболее близким по технической сущности и достигаемому результату из уровня техники по отношению к объекту изобретения "система управления роликом" является устройство, описанное в указанном выше патентном описании GB-A-1395319. Известная система управления роликом в бесступенчатой передаче (БСП) типа сцепления по тороидальной канавке качения включает узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, при этом указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, выполненными с возможностью коаксиального вращения и представляющими входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-посту-пательного перемещения в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта с управляющим механизмом. Недостатком известного устройства является сложность его конструкции. В основу настоящего изобретения поставлена задача упрощения конструкции системы управления роликом. Поставленная задача достигается тем, что в системе управления роликом в бесступенчатой передаче (БСП) типа сцепления по тороидальной канавке качения, включающей узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, при этом указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, выполненными с возможностью коаксиального вращения и представляющими входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-поступательного перемещения в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта с управляющим механизмом, согласно изобретению, положение центра ролика относительно оси ролика является фиксированным, а узел ролика установлен з возможностью вращения вокруг более, чем одной оси относительно неподвижных частей управляющего механизма. Кроме того, контакт между управляющим механизмом и узлом ролика образован при помощи шарового соединения или подобного элемента, обеспечивающего их взаимное вращение вокруг более, чем одной оси. Кроме того, управляющий механизм выполнен в виде поршня с возможностью перемещения внутри цилиндра. Кроме того, комбинация поршень-цилиндр является комбинацией двойного действия. Кроме того, комбинация поршень-цилиндр является комбинацией одинарного действия, обладающей способностью к приложению силы в первом направлении, причем предусмотрены также второй поршень и цилиндр, обладающие способностью к приложению силы во втором направлении, противоположном первому. Кроме того, поршень выполнен гибким с возможностью отклонения центра поршня от оси цилиндра. Кроме того, относительное вращение между поршнем и цилиндром имеет место только вокруг оси цилиндра, а контакт между узлом ролика и управляющим механизмом обеспечивается за счет дополнительного соединения, обеспечивающего вращение вокруг других осей. Кроме того, управляющий механизм расположен только с одной стороны плоскости, проходящей через основную ось БСП и центр ролика. Кроме того, управляющий механизм включает комбинацию поршень-цилиндр одинарного действия, включающую первый поршень, выполненный с возможностью перемещения в первом цилиндре и приложения силы в первом направлении, причем управляющий механизм также включает второй поршень и цилиндр, выполненные с возможностью приложения силы во втором противоположном направлении, при этом указанный второй поршень и несущая конструкция являются раздельными компонентами, которые упираются один в другой без взаимной блокировки. Кроме того, система включает комбинацию поршень-гидроцилиндр, которая выполнена с возможностью приложения управляющей силы на несущую конструкцию, причем в цилиндре выполнен канал, посредством которого цилиндр имеет возможность сообщаться с гидравлической цепью, при этом поперечное сечение канала в основном совпадает с поперечным сечением корпуса гидроцилиндра. Кроме того, управляющий механизм включает гидравлическую цепь и по меньшей мере одну комбинацию поршень-гидроцилиндр, связанную с гидравлической цепью, причем связь между гидроцилиндром и цепью является таковой что приближение поршня к концу своего рабочего хода сигнализирует о состоянии перегрузки или другой аварийной ситуации для системы, при этом цепь перекрывается, что вызывает повышение давления рабочей жидкости выше по потоку и препятствует выходу поршня за рабочее отверстие цилиндра. Наиболее близким по технической сущности и достигаемому результату из уровня техники по отношению к объекту изобретения "бесступенчатая передача по типу сцепления по тороидальной канавке качения" является устройство, описанное в указанном выше патентном описании GB-A-1395319. Известное устройство содержит систему управления роликом, включающую узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, причем указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, обладающими способностью коаксиального вращения и представляющими входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-поступательного перемещения в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта с управляющим механизмом. Недостатком известной бесступенчатой передачи является сложность конструкции. В основу настоящего изобретения по объекту "бесступенчатая передача" поставлена задача упрощения конструкции передачи. Поставленная задача достигается тем, что в бесступенчатой передаче по типу сцепления по тороидальной канавке качения, содержащей систему управления роликом, включающую узел ролика, содержащий несущую конструкцию и подшипники, установленные в ней, а также ролик, установленный с возможностью вращения в указанных подшипниках, причем указанный ролик установлен с возможностью контакта и передачи сцепления между дисками, обладающими способностью коаксиального вращения и представляющими входную и выходную канавки качения, соответствующие разным частям поверхности одного тора, причем при выполнении этого он подвергается действию сил сцепления в местах контакта диск/ролик, и также включающая управляющий механизм, который содержит неподвижные и подвижные части, при этом подвижные части расположены под самоустанавливающимся углом по отношению к дискам и с возможностью возвратно-поступательного перемещения в заранее установленном диапазоне рабочего хода и управления для приложения заранее установленной управляющей силы к несущей конструкции, при этом указанные управляющий механизм и несущая конструкция принимают положение равновесия, при котором результирующая управляющей силы и сил сцепления, действующих на узел ролика в плоскости, перпендикулярной оси дисков, равна нулю, причем несущая конструкция содержит жесткую структуру, относительно которой зафиксирована ось ролика и которая пребывает в контакте с управляющим механизмом в месте, удаленном от оси ролика таким образом, что узел ролика имеет только три точки контакта со смежными компонентами, две из которых являются контактами диск/ролик, а третья является точкой контакта с управляющим механизмом, согласно изобретению, положение центра ролика относительно оси ролика является фиксированным, а узел ролика установлен з возможностью вращения вокруг более, чем одной оси относительно неподвижных частей управляющего механизма. Кроме того, бесступенчатая передача содержит неподвижный корпус, а по меньшей мере часть управляющего механизма установлена на указанном неподвижном корпусе. Кроме того, система управления роликом включает комбинацию поршень-гидроцилиндр, которая выполнена с возможностью приложения управляющей силы на несущую конструкцию, причем в цилиндре образован канал, посредством которого цилиндр сообщается с гидравлической цепью, при этом поперечное сечение канала в основном совпадает с поперечным сечением корпуса гидроцилиндра, а гидравлическая цепь включает канал кольцеобразной формы, образованный внутри корпуса бесступенчатой передачи и коаксиальный с основной осью бесступенчатой передачи. Кроме того, канал имеет форму незавершенного кольца, причем разрыв в кольце обеспечивает доступ в корпус бесступенчатой передачи для других компонентов. Настоящее изобретение исходит из дальнейшего рассмотрения всего диапазона принуждений, которые связаны с наклоном роликов, и осями, относительно которых они наклоняются, и результирующего заключения, что ориентация роликов и тем самым передаваемого передаточного числа может достигаться с помощью другой и более простой конструкции несущих конструкций роликов, и ограничения их движения, и в частности, в отношении числа контактов между каждой несущей конструкцией и смежной структурой. Изобретение применяется, в частности, но не исключительно, к системам управления роликами, в которых есть компонент угла продольного наклона при контактах между роликами и канавками качения. Изобретение определяется формулой изобретения, содержание которой должно рассматриваться как часть изложения этого описания изобретения, со ссылкой на дальнейшие схематические чертежи, среди которых: Фиг. 4 - вид одного вариатора в положении, перпендикулярном к его оси с некоторыми частями в размере. Фиг. 5 - вид того же вариатора с некоторыми частями в разрезе по линии на Фиг. 4. Фиг. 6 - схематический вид частей другого вариатора. Фиг. 7 - вид более подробный еще одного вариатора в сечении, перпендикулярном к его оси. Фиг. 8-17 - схематические иллюстрации раз-ных систем управления роликами согласно изобретению. Фиг. 18 - вид ролика, несущей конструкции его и функционирующего устройства другого вариатора, частично вертикально и частично в разрезе. Фиг. 19 - вид поршня другого функционирующего устройства. Фиг. 20 - вид гидравлической цепи для использования при соединении с функционирующим устройством на Фиг. 19, и Фиг. 21 - вид части альтернативной гидравлической цепи. На Фиг. 4 и 5 показан ролик 40, передающий привод от входного диска 41 выходному диску 42 вариатора с тороидальной канавкой качения, заключенных в кожух (корпус) 43. Позиции 41, 40, 42 и 43 соответствуют, пo-существу, позициям 4, 19, 12 и 18 на Фиг.1. Ролик 40 смонтирован на оси 44 в подшипниках 45, 46 для вращения вокруг оси 47 в несущей конструкции (шасси) 48, так что и ось 47, и центр 49 ролика являются неподвижными относительно несущей конструкции, которая сама по себе крепится резьбовым соединением 50 и стопорной гайкой 51 к одному концу вала 52. Поршень 53 двойного действия, смонтированный на другом конце этого вала, перемещается в цилиндре 54, и две камеры 55 и 56 этого цилиндра соединены линиями 57 и 58 с источником 11 напорной (гидравлической) жидкости с помощью средства контрольного клапана 36, как на Фиг. 2. Вал 52 входит в цилиндр 54 посредством гибкого герметизирующего уплотнения 59, которое смонтировано на концевой пластине 60 цилиндра и может ограниченно поперечно перемещаться без потери герметизации. Как лучше видно на увеличенной вставке к Фиг. 4, центральное герметизирующее кольцо 61 поршня 53 имеет наружный обод 62, который соответствует эффективно поверхности сферы, имеющей в качестве своего центра точку 63, которая также является центром поршня. Центр 63 поршня таким образом принуждается к движению вдоль оси 64 цилиндра 54, но по причине контура ободка 62 и гибкого герметизирующего уплотнения 59 несущая конструкция 48 способна в любое время вращаться вокруг оси 64 и вращаться вокруг ортогональных осей 65 и 66. Ролик 40 взаимодействует с тороидальной канавкой качения 67 диска 41 в 68, и соответствующей канавкой качения 69 диска 42 в 70, и как показано на Фиг.4, диски 41 и 42 вращаются, как показано стрелками 71 и 72. Согласно изобретению мы установили, что реактивные силы действуют только в трех точках контакта, а именно, две реактивные силы между дисками и роликом, и третья реактивная сила - на поршень 53, которые (силы) являются достаточными для обеспечения, чтобы ролик принимал и сохранял соответствующий угол для данного передаточного числа, при котором реакции поршень/жидкость и ролик/диск уравновешиваются без любого дополнительного физического ограничения в отношении ролика или несущей конструкции. Это, конечно, противоположно, в частности, устройству согласно патента US-A3933054, в котором, как уже сказано, четыре контакта со смежным устройством необходимы для стабильности. Также следует отметить, что нет требования в отношении дисков 41, 42, чтобы они могли одновременно и одинаково двигаться вдоль оси 2 БСП, как необходимо в патенте GB-A-1800972. Номинальное осевое положение диска 63 в БСП практически будет заранее определено, также как диск 5 на Фиг.1. Основная геометрия вариатора с тороидальной канавкой качения требует, чтобы цент 49 ролика всегда находился в центральном круге общей конфигурации дисков 41 и 42, который в свою очередь, лежит в средней плоскости 73 конфигурации. Поэтому телесный угол, в котором линия 74 (которая начерчена проходящей через центр 49 ролика и центр 63 поршня) может двигаться, должен быть достаточно большим, чтобы предоставить возможность центру ролика и центральному кругу конфигурации совпадать при любом положении поршня 53 в цилиндре 54. Далее, так как центр 63 поршня 53 принуждается следовать фиксированной оси 64 цилиндра 54, поэтому угол между этой осью и плоскостью 73 становится номинальным углом продольного наклона вариатора. Однако видно, что фактический угол продольного наклона С1 (Фиг.4) лежит между плоскостью 73 и линией 74, и что этот угол будет немного изменяться при использовании в зависимости от положения поршня 53 в цилиндре 54 и таким образом, когда поршневой центр 63 лежит на оси 64. Следует также отметить, что в варианте выполнения изобретения, показанном на Фиг. 4, определение соответствующего угла передаточного числа, как только что описано, требует, чтобы ролик 40 принуждался вращаться вокруг фиксированной оси и фиксированного центра 49 в несущей конструкции 48. Если бы этот центр мог свободно перемещать вверх и вниз ось 47 вращения, как это имеет место в некоторых известных несущих конструкциях в этой области техники, должна существовать дополнительная степень свободы, и необходимое управление роликом не осуществлялось бы. Более конкретно, если ось 47 вращения могла бы шарнирно поворачиваться относительно направления управляющей силы, создаваемой поршнем 53, по типу, допускаемому пальцевым (штыревым) соединением 47 в US-A-3933054, должна снова существовать дальнейшая степень свободы, и необходимое управление роликом не достигалось бы. Удовлетворительное управление передаточным числом в варианте выполнения на Фиг. 4 достигается путем соединения ролика и несущей конструкции с функционирующим устройством (иначе говоря, поршень двойного действия и цилиндр 53/54), где только одна точка соединения (эффективно поршневой центр 63) подвергается осевому и радиальному принуждению, несущая конструкция свободна двигаться в пределах ограниченного телесного угла, имеющего свою вершину в этой точке, и где весь функционирующий блок лежит на одной стороне от центра 49 ролика. Это явно обеспечивает экономию в отношении компонентов по сравнению с известной двух концевой ограниченной в движении несущей конструкцией, снабженной шарообразными концами 30, 31 на Фиг. 2 настоящей заявки, или цапфы 32/пазы 31 в US-A-1865102, и подвижные роторы 10, 12 в GB-A-1600972. Другое преимущество варианта выполнения настоящего изобретения, показанного на Фиг. 4 и 5, по сравнению с предшествующими прототипами, такими, как показаны на Фиг. 2 и 3 настоящей заявки, состоит в том, что один цилиндр 54 может быть, как лучше показано на Фиг. 4, обычно смонтирован не на треугольной раме, такой как под позицией 23 на Фиг. 2, которая подобно роликам и несущим конструкциям должна располагаться между входным и выходным дисками, а непосредственно и просто на кожухе (корпусе) 43 вариатора в целом. Это, в свою очередь, помогает сделать возможным большие величины номинального угла продольного наклона между осью 64 цилиндра и плоскостью 73 и, тем самым, фактический угол продольного наклона С1 между плоскостью 73 и линией 74. Исследования показывают, что рабочие величины угла продольного наклона С1, порядка 20° или даже 5-8°, которые наиболее часто используются в этой области техники, могут вообще содействовать большей стабильности, и в частности, более быстрому возврату к равновесию (при котором ось 47 и ось 2 вариатора пересекаются), когда осевое движение поршня 53 нарушает это равновесие с тем, чтобы побудить ролик и несущую конструкцию произвести наклон относительно линии 74 и тем самым изменить передаваемое передаточное число. На Фиг. 4 и 5 все функционирующее устройство лежит только с одной стороны плоскости, которая включает в себя ось 2 БСП и центр 49 ролика. Это содействует компактности конструкции, но комбинация поршня двойного действия и цилиндра подобно позициям 53, 54 на Фиг. 4 и 5, может представлять проблемы конструирования и функционирования в некоторых случаях, и на Фиг. 6 и 7 показаны альтернативные конструкции согласно изобретению, и цифровые позиции на Фиг. 4 и 5 используются в отношении идентичных частей/деталей. На Фиг. 6 шарообразные элементы 75 и 76 смонтированы на несущей конструкции 48 на противоположных концах диаметра, и взаимодействуют с соединительными гнездами в поршнях 77, 78, которые перемещаются в цилиндрах 79, 80 соответственно. Камеры 81, 82 этих двух цилиндров соединены с источником (гидравлического) давления 11 с помощью средства клапана 36, подобно тому, как показано на Фиг. 4 в отношении двух камер цилиндра 54. Поршень 77 перемещается точно в цилиндре 79, так что центр 83 шарообразного элемента 75 побуждается к оси 64 цилиндра, но гибкое герметизирующее кольцо 84, которое расширяет кольцевой зазор между поршнем 78 и его цилиндром 80, предоставляет некоторую свободу движения с эффектом, что направление поршня 78 цилиндром 80 таково, как если бы не было контакта твердого тела с твердым телом двух частей. Единственный существенный эффект на несущую конструкцию 48 сил, оказываемых на нее поршнем 78, сравнимых с толкающими силами поршня 77, если бы он был двойного действия, будет сказываться на шаре 75. В этом варианте выполнения изобретения центр 83 шара составляет эффективную точку соединения между несущей конструкцией и ее функционирующим устройством (подобно поршневому центру 63 на Фиг. 4) и линия 85, соединяющая центр 83 шара и центр 49 ролика занимает место линии 74, как линия, которая определяет рабочий угол продольного наклона С1 со средней плоскостью 73 конфигурации (тора). Соединение между шаром 75 и поршнем 77 поэтому имеет особенность принуждения (ограничения) несущей конструкции 48 таким образом, что центр 83 шара может перемещаться вдоль оси 86, так что несущая конструкция может также вращаться не только вокруг этой оси, но и также вокруг оси 87, перпендикулярной к ней, и вокруг другой ортогональной оси, которая располагается перпендикулярно к 86 и 87 и тем самым также к бумаге чертежа. Цилиндры 79 и 80 могут оба, как показано, быть смонтированы на кожухе/корпусе 43 вариатора. На Фиг. 7 показан ролик 40, смонтированный как прежде на подшипниках 45, 46, для вращения вокруг фиксированного центра 49 в несущей конструкции 80, но в этом варианте выполнения несущая конструкция 88 образована с поршнями 89 и 90 на противоположных концах. Эти поршни перемещаются в противоположно обращенных друг к другу цилиндрах 91 и 92, смонтированных на раме 93 (сравнимо с позицией 23 на Фиг.2), расположенной между входным диском 94 и выходным диском (не показано) вариатора. Позиции 95 и 96 представляют входной вал и кожух/корпус вариатора соответственно, элемент 93 рамы прикреплен к раме. Кольцо 97 поршня 89 имеет форму аналогично позиции 61 поршня 53 на Фиг. 4, так что центр 98 поршня имеет ту же функцию, как и центр 63 поршня 53, и принуждается следовать оси 64 цилиндра. Существенный кольцевой зазор между поршнем 90 и его цилиндром 92 расширяется гибким кольцом 99, сравнимым кольцом 84 на Фиг. 6, и так же , как на этой Фигуре, камеры 81, 82 цилиндров соединены с помощью средства контрольного клапана 36 с источником 11 давления. Эффект поршня 90 на несущую конструкцию 88 тем самым сравним с эффектом поршня 78 на Фиг. 6, способствуя пренебрегаемому радиальному ограничению и эффективно прилагая только такую силу к несущей конструкции, как поршень 89, если бы был двойного действия, оказывал, когда толкал ее. Поршневой центр 98 поэтому составляет эффективную точку соединения между несущей конструкцией и ее функционирующим устройством, подобно позициям 63 и 83 на Фиг. 4 и 6, и побуждается перемещаться вдоль оси 64, но и также дает возможность несущей конструкции 88 вращаться не только вокруг оси 64, но и также вокруг ортогональной оси 100 и вокруг третьей оси, которая проходит через центр 98 и лежит под прямыми углами к 64 и 100, и тем самым также к бумаге чертежа. В этом варианте выполнения изобретения, как на Фиг. 4, «номинальный» угол продольного наклона вариатора будет устанавливаться осью 64 цилиндра 91, но фактический и немного измененный угол продольного наклона при использовании будет углом, как показано на Фиг. 4, при котором линия, соединяющая центр 49 ролика и поршневой центр 98, пересекается со средней плоскостью конфигурации (тора) (не показано, но сравнимо с позицией 73 на Фиг.4 и 6). Как в случае несущей конструкции 48 на Фиг. 4, несущая конструкция 88 способна перемещаться в ограниченном телесном угле вокруг точки, ограниченная перемещаться вдоль оси 64, причем угол достаточен не только для возможности ролику 40 двигаться в полном диапазоне углов передаточного числа, необходимых для вариатора, но и также для возможности центру 49 ролика находиться в центральном круге конфигурации (его единственное геометрически возможное положение) все время, какое бы ни было положение поршня 89 в его цилиндре 91. Хотя изобретение определено формально формулой изобретения, изобретение, говоря менее формально, направлено на создание системы управления роликом, которая значительно упрощена по сравнению со многими известными системами, в которой функциони-рующее устройство вызывает поступательное движение у несущей конструкции ролика, которое определяет местоположение центра ролика на круговой траектории, проходящей центрально вокруг конфигурации, и в которой несущая конструкция имеет достаточную степень свободы вращения, так что ничто не ограничивает центр ролика следовать этой траектории с тем, чтобы принимать положение, требуемое функционирующим устройством все время. Когда конфигурация (тор) является круглого поперечного сечения, как показано на всех Фигурах, эта траектория будет кругом центра конфигурации. На Фигурах с 8 по 17 показано в виде эскизов, только выбор типов систем управления роликом, которые входят в объем настоящего изобретения. На Фиг. 8 поршень 101 может перемещаться аксиально и вращаться подобно шару в цилиндре 102, и крепиться жестко к валу 103, который, в свою очередь жестко крепится к несущей конструкции 104 ролика. Вал 103 и несущая конструкция 104 могут также рассматриваться вместе как составляющие одинарный монолитный узел несущей конструкции. Центр и ось вращения ролика неподвижны относительно несущей конструкции, и передняя стенка цилиндра 102 может прогибаться для размещения отклонения штока 103. Цилиндр 102 двойного действия, и практически будет монтироваться в коробке передач. Следует отметить, что вариант выполнения изобретения, уже описанный подробно со ссылками на Фиг. 4 и 5, представляет именно такой тип. На Фиг. 9, как и на Фиг. 8, поршень 101 может вращаться как шар внутри цилиндра 102 и жестко крепиться к штоку 103, но теперь цилиндр 102 является только одинарного действия, и продолжение 105 штока на удаленной стороне несущей конструкции 104 начинается шаровым соединением 106 с дальнейшим поршнем 107 шарового типа, перемещающемся в цилиндре 108 одинарного действия. Поршень 107 и цилиндр 108 образуют систему с реверсивным движением, которое цилиндр 102 может создавать, если бы был двойного действия, как на Фиг. 8. На Фиг.9, таким образом, показан вариант систем одинарного действия, уже описанных более подробно со ссылкой на Фиг. 6 и 7. На Фиг. 10 цилиндр 102 снова является цилиндром двойного действия, и поршень 109, способный только к поступательному движению вдоль оси цилиндра и вращению вокруг оси цилиндра, жестко крепится к штоку 110. Другой конец этого штока прикреплен посредством шарового соединения 111 к несущей конструкции 104. На Фиг. 11, аналогичной Фиг. 10, цилиндр 102 в отличие от Фиг. 10 является теперь только одинарного действия. Поэтому система продлевается до позиции 105-108, как на Фиг. 9, для образования средства для реверсивного движения. На Фиг. 12 показано изменение, внесенное на Фиг. 8 и Фиг. 10. Цилиндр 102 является двойного действия, как на обеих этих Фигурах, поршень 109 такой, как на Фиг. 10, и его жесткое соединение 103 с несущей конструкцией 104 такое, как на Фиг. 8. Для обеспечения дополнительной степени свободы вращения согласно изобретению сам цилиндр 102 поэтому монтируется с возможностью вращения как шар внутри неподвижного и дополнительного шарообразного кожуха 112. На Фиг. 13, которая содержит другой поршень 113, сравнимый с позицией 109 и перемещающийся в цилиндре 108, который может вращаться подобно шару в кожухе 114, сравнимом с 112, показано соответствующее изменение конструкции на Фиг. 9. Система, показанная на Фиг. 14, сравнима с конструкцией на Фиг. 10, но функционирующий блок, вместо того, чтобы быть в форме обычного поршня, перемещающегося в цилиндре, теперь в виде рычага 115 с возможностью вращения вокруг фиксированного центра 116 и соединенного посредством шарового соединения 117 со штоком 103, с каким жестко соединена несущая конструкция 104 как прежде на Фиг. 15 аналогичная, но с той разницей, которую имеют относительно положения центра 118 ролика и центра вращения 116, и, как следствие, принятая другая форма вместо рычага 115. Система, показанная на Фиг. 16, представляет еще один вариант системы на Фиг. 8. Цилиндр 102 снова двойного действия, и несущая конструкция 104 жестко соединена с поршневым штоком 103 как прежде. Однако поршень 119 теперь гибкий, так что когда центр 120 (Фиг. 8) поршня 101 принуждается следовать оси цилиндра 102, центр 121 поршня 119 не принуждается. Необходимое дальнейшее принуждение в отношении системы вызывалось штоком 103, перемещающего через сопряженную и герметизирующую полость в шаре, который может вращаться без потери жидкости в сопряженном шарообразном кожухе 122, образованном в передней стенке 123 цилиндра 102. Система, показанная на Фиг. 17, является вариантом системы, показанной на Фиг. 12. Однако, если на Фиг. 12 необходимая степень свободы вращения была достигнута путем предоставления возможности цилиндру 102 вращаться как таковому, подобно шару, в кожухе 112, в варианте Фиг. 17 необходимые два вращательных движения разъединены. Выступ 124 прикреплен к цилиндру 102, и имеется вращательное соединение между этим выступом и вторым выступом 125, соединенным с муфтой 126, причем это вращательное соединение обеспечивает взаимное вращение вокруг оси 127. Муфта 126 может сама вращаться далее вокруг оси 128 и крепиться. Оси 127 и 128 взаимно перпендикулярны, но не пересекаются. Варианты выполнения, показанные на Фиг. с 8 по 17 чертежей, используют каждый некоторые общие средства. Во-первых, имеются средства, способные производить поступательное движение центра ролика вперед и назад вдоль круга центра конфигурации (тора): это достигается путем вращательного движения концов рычага 115 на Фиг. 14 и 15, с помощью ходов поршней 101, 109 и 119 на остальных Фигурах с 8 по 17. Во-вторых, имеется свобода для ролика вращаться вокруг диаметра и тем самым изменять передаваемое передаточное число. На Фиг. 14 и 15 эта свобода вращения полностью обеспечивается благодаря шаровым соединениям 117, на Фиг 10 и 11 она обеспечивается совместно шаровым соединением 111 и способностью поршня 109 вращаться вокруг оси цилиндра 102, и в остальной части этих фигур она достигается способностью всех поршней 101, 109, 119 вращаться вокруг оси своих соответствующих цилиндров 102. В-третьих, и ось, и центр 118 вращения ролика 129 являются неподвижными относительно жесткой несущей конструкции 104. В-четвертых, положение центра ролика, который принуждается следовать кругу центра конфигурации (тора), не вызывает нагрузок на несущую конструкцию и на ее функционирующий блок. Это положение может подвергаться размерным изменениям при изготовлении или сборке; в плоскости круга центра конфигурации (тора) центр ролика будет следовать по кривой круга центра конфигурации, тогда как сам круг центра конфигурации будет перемещаться в направлении оси коробки передач под действием изменений оконечной нагрузки. Устранение таких нагрузок достигается путем конструирования несущей конструкции и ее функционирующего устройства, чтобы придать центру ролика свободу для перемещения через две пересекающиеся дуги, которые лежат в разных и пересекающихся плоскостях. Это устройство будет также согласовывать небольшие изменения в угле продольного наклона, которые могут происходить при использовании в вариантах выполнения на Фиг. 8, 9, 12, 13,16 и 17. В-пятых, во всех вариантах выполнения изобретения имеется постоянное и треугольное соотношение между двумя точками, в которых ролик реагирует тангенциально с дисками, и место, в котором управляющая сила прилагается к узлу ролика. На всех Фигурах с 8 по 17 управляющая сила действует вдоль штока 103 и прилагается к этому штоку в местоположении, отстоящем от оси ролика. Два контакта ролик/диск являются неподвижными относительно этого штока, но перемещаются от него и друг от друга. Стабильный треугольник сил, действующих в одной плоскости, тем самым устанавливается. Этот стабильный треугольник будет продолжать существовать даже если центр и ось ролика будут смещены, но оставаться фиксированными относительно оси штока 103, потому что геометрия разрешения управляющей силы и двух тангенциальных реактивных сил ролика/диска относительно треугольника будет оставаться постоянной. В варианте выполнения на Фиг. 18 ролик 40 передает сцепление между частью тороидальной канавки качения 67 входного диска 41 и соответствующей частью тороидальной канавки качения 69 на выходном диске 42, и смонтирован на несущей конструкции 48, прикрепленной жестко на одном конце (как на Фиг. 4) к поршню 53, центр 63 которого принуждается следовать оси 64 цилиндра 130, по которой он движется. Противоположный конец несущей конструкции 48 образован как сферическая поверхность 131, которая при использовании упирается в плоскую рабочую поверхность 132 отдельного поршня 133, перемещающегося в цилиндре 134. Несущая конструкция 48 и поршень 133 таким образом не только разъединены, но и также без взаимной блокировки при использовании, и поэтому не похожи на конструкции, показанные на Фиг. 6, где имеется соединение типа шара - в -сферическом гнезде, между несущей конструкцией 48 и поршнем 78, и на Фиг. 9, 11 и 13, где несущая конструкция 104 также прикреплена к поршням 107 и 113. Конструкция на Фиг. 18 имеет преимущество в том, что ролик 40 может быть помещен между дисками 41 и 42 в результате следующей последовательности простых операций: 1. При отключенной мощности гидравлической жидкости переместить поршень 133 в цилиндре 134. 2. Вставить поршень 53 в цилиндр 130 и ввести ролик 40 между дисками 41 и 42, пока крона стороны 131 не будет, по-существу, выровнена с осью поршня 133. 3. Освободить поршень 133. Затем, когда БСП начнет функционировать, входной диск 41 вращается, и поршни 53 и 133 подвергаются давлению гидравлической жидкости, ролик 40 примет правильную ориентацию, и рабочая сторона 132 будет упираться в сферическую поверхность 131, чтобы оказать воздействие восстанавливающей силы, которую сам поршень 53 одинарного действия оказать не может. Далее, внутренние концы цилиндров 130, 134 не закрыты, но полные отверстия этих цилиндров сообщаются с кольцевыми каналами 135, 136, образованными в корпусе 43 БСП. Каналы 135, 136 каждый сообщаются с источником 11 жидкости и соответствующими средствами контрольного клапана 36, как показано схематично на Фиг. 4 и 6, и также сообщаются с обратной линией 137 и 138, как обычно. Если несущая конструкция 48 производит резкое осевое движение при использовании по причине некоторой срочности, такой, как аварийная остановка или изменение в дорожном покрытии, например, с нормального на гололед, большое поперечное сечение доступа между каналами 135, 136 и цилиндрами облегчает быстрый ввод жидкости в цилиндр 130 и выход жидкости из цилиндра 134 или наоборот. Такой быстрый впуск и выпуск гидравлической жидкости был невозможен, и вызывал повышение нежелательного обратного давления в случае, если цилиндры были с закрытыми концами и соединялись с цепью гидравлической жидкости посредством только нормального входного небольшого отверстия и выходных отверстий. Когда набор роликов (таких, как под позицией 19 на Фиг.1) передает крутящий момент между тем же входным и выходным диском, те же каналы 135, 136 могут обычно сообщаться с соответствующими поршнями 53, 133 всех роликов в наборе. Когда имеется два набора роликов (как под позициями 19, 21 на той же Фигуре), используемых вместе с БСП двойного действия, каналы 135, 136 могут сообщаться с поршнями одного набора и каналы 139 и 140, также образованные в кожухе/корпусе 43, могут сообщаться с поршнями другого набора. Каналы 135, 139 соединены трубопроводом 141, так что давления, существующие в них, равны, и каналы 136, 140 соединены аналогичным образом трубопроводом 142. Поршень 53, перемещающийся в цилиндре 130 на Фиг. 19, модифицирован путем удлинения 143, концевая поверхность которого стыкуется с боковой стенкой 144 с помощью слегка изогнутой кромки 145. Кромка обратной линии 137, где она входит в канал 135, образована с угловой фаской в 146. Если при использовании БСП образуется условие перегрузка/злоупотребление, что отражается в экстремальном осевом перемещении (влево на Фиг. 19) поршня 53, поверхности 145 и 146 будут сближаться, вызывая дополнительное сопротивление в нормальном потоке жидкости из канала 135 в обратную линию 137. Давление в каналах 135 и 139 поэтому будет повышаться и, так как давление в этих каналах действует на все остальные поршни 53, все эти остальные поршни будут подвергаться действию повышенной силы, которая противостоит им, когда они приближаются к соответствующим экстремальным положениям своих диапазонов осевого перемещения. Поэтому устанавливается эффект «останова гидравлического конца». На Фиг. 20 схематично показан один возможный практический вариант выполнения, в котором источник 11 гидравлической жидкости содержит двойные насосы 147, 148, соединенные с каналами 135, 139, 136, 140, питающие рабочие цилиндры 130, 134 двух наборов цилиндров (19, 21) БСП двойного действия с тороидальной канавкой качения для сцепления. Обратные линии 137, 138 гидравлической цепи соединяют с цилиндрами только одного ролика (149), который действует как «основной» в отношении остальных роликов. Поршень 53 несущей конструкции 48 этого ролика несет продолжение (удлинение) 143, которое выполняет действие «останова конца», как уже сказано, когда поршень 53 стремится отклониться в цилиндре 130, и поршень 133 этого же самого ролика несет уплотнение 150, которое выполняет аналогичный эффект останова конца путем сближения с цилиндрической концевой стенкой 151 и преграждения выходного канала 152, когда этот поршень стремится к отклонению в цилиндре 134. Следует также отметить, что цилиндры 153 оконечной нагрузки, которая генерирует силу оконечной нагрузки, побуждающую диски 41, 42 в контакт с роликами 40, соединяется с частью гидравлической цепи, которая близка к каналам и к устройству функционирования ролика, по-существу, без значительного внесения сопротивления, так что одинаковое давление имеет место в каналах и цилиндре 153 постоянно. Эффект конечного останова посредством основного поршня (53) устройства функционирования роликов может потребовать точной станочной обработки кромки 145, которая должна соответствовать части поверхности сферы с центром 63. На Фиг. 21 показана часть альтернативной конструкции, в которой более простой «второй поршень» 133 одного ролика (154) образует эффект конечного останова в левой стороне гидравлической цепи, когда этот поршень стремится к отклонению. Смежный ролик 155 расположен иначе, так что его «второй» поршень 133 находится на правой стороне цепи (соответствующей каналам 136, 140) и генерирует эффект конечного останова на этой стороне цепи, когда он отклоняется. Фиг. 1 Фиг. 2 Фиг. 3 Фиг. 4 Фиг. 5 Фиг. 6 Фиг. 7 Фиг. 8 Фиг. 9 Фиг. 10 Фиг. 11 Фиг. 12 Фиг. 13 Фиг. 14 Фиг. 15 Фиг. 16 Фиг. 17 Фиг. 18 Фиг. 19 Фиг. 20 Фиг. 21 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03
ДивитисяДодаткова інформація
Назва патенту англійськоюRoller control system for continuously-variable-ratio transmission and continuously-variable-ratio transmission
Автори англійськоюFellows Thomas George, Greenwood Christopher John, Winter Philip Duncan
Назва патенту російськоюСистема управления роликом для бесступенчатой передачи и бесступенчатая передача
Автори російськоюФеллоуз Томас Джордж, Гринвуд Кристофер Джон, Уинтер Филип Дункан
МПК / Мітки
МПК: F16H 15/32
Мітки: безступеневої, передачі, безступенева, роликом, передача, система, управління
Код посилання
<a href="https://ua.patents.su/19-40564-sistema-upravlinnya-rolikom-dlya-bezstupenevo-peredachi-ta-bezstupeneva-peredacha.html" target="_blank" rel="follow" title="База патентів України">Система управління роликом для безступеневої передачі та безступенева передача</a>
Безступенева коробка передач
Номер патенту: 12422
Опубліковано: 28.02.1997
Автор: Чернишов Петро Дмитрович
МПК: B60K 17/04
Мітки: коробка, передач, безступенева
Формула / Реферат:
Бесступенчатая коробка передач, содержащая установленные в корпусе ведущий и выходной палы и снизывающий их механизм регулирования частоты вращения и крутящего момента на последнем, отличающаяся тем, что механизм регулирования частоты вращения и крутящего момента на выходном валу выполнен в виде устройства включения переднего и заднего хода, устройства передачи па выходной вал основного движения, устройства регулирования величины...
Система управління двигуном внутрішнього згорання транспортного засобу
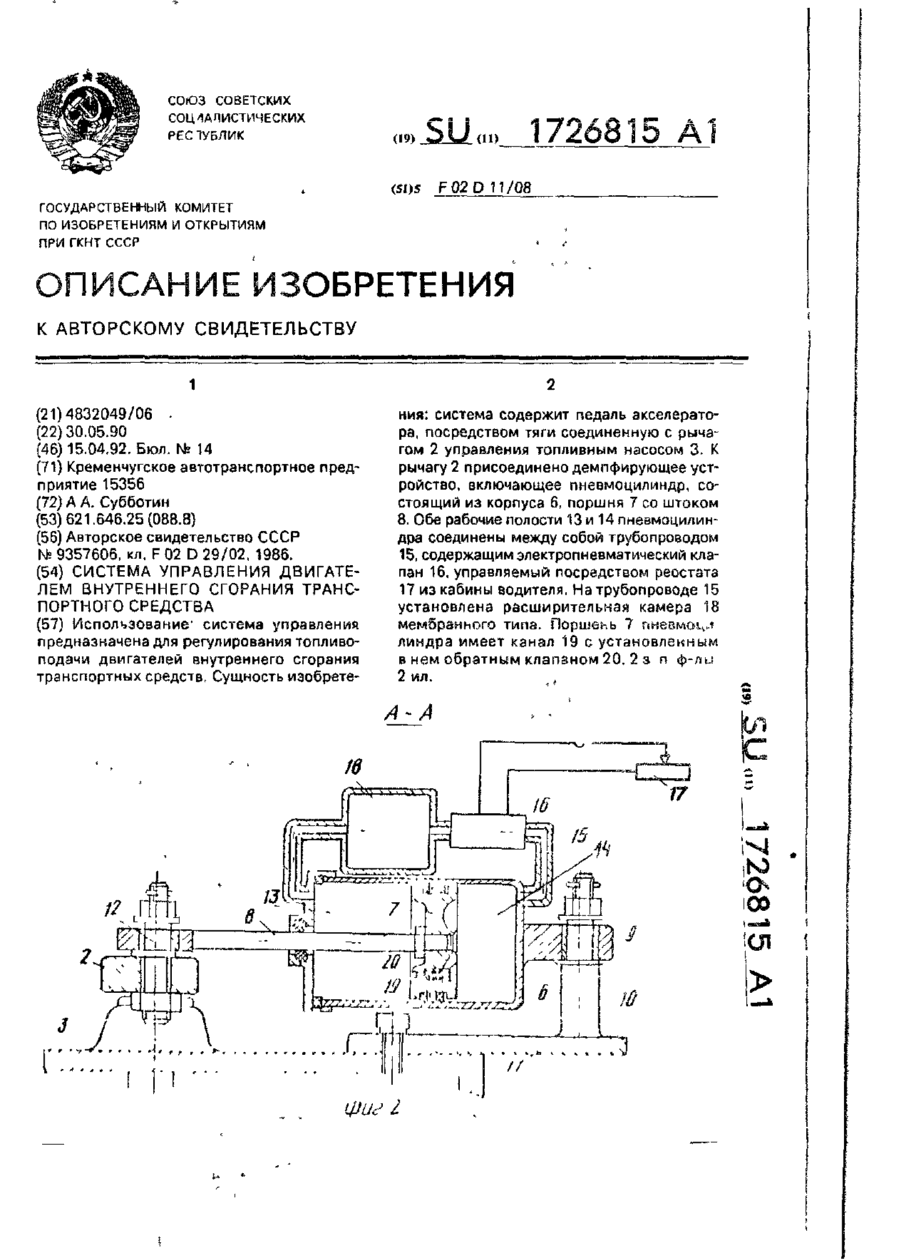
Номер патенту: 11961
Опубліковано: 25.12.1996
Автор: Субботін Олександр Олександрович
МПК: F02D 11/06
Мітки: засобу, згорання, транспортного, внутрішнього, управління, система, двигуном
Формула / Реферат:
1. Система управления двигателем внутреннего сгорания транспортного средства, содержащая топливный насос высокого давления, размещенный в корпусе и снабженный рычагом управления подачей топлива, подпружиненную педаль акселератора, связанную с рычагом управления подачей топлива, и демпфирующее устройство, выполненное в виде герметичного корпуса с перегородкой, разделяющей корпус на две полости, соединенные между собой посредством...
Система управління транспортним засобом
Номер патенту: 11693
Опубліковано: 25.12.1996
Автори: Воронов Микола Сергійович, Бондарєв Євгеній Ілліч
МПК: B60T 7/04
Мітки: управління, засобом, транспортним, система
Формула / Реферат:
Система управления транспортным средством, содержащая двухпедальный механизм управления аварийными тормозами и двухпедальный механизм управления гидроприводом с промежуточным валом, оборудованным ограничителем, расположенный между двух упоров, отличающаяся тем, что, с целью повышения надежности и долговечности систем аварийных и рабочих тормозов, а также повышения безопасности движения транспортного средства, на педалях механизма...
Система управління вальцовим млином
Номер патенту: 6000
Опубліковано: 29.12.1994
Автори: Вернер Вінтелер, Ханс Етікер, Лендерт Кеттінг, Роберт Лінцбергер
Мітки: млином, управління, система, вальцовим
Формула / Реферат:
(57) 1. СИСТЕМА УПРАВЛЕНИЯ ВАЛЬЦОВОЙ МЕЛЬНИЦЕЙ, включающая датчик расхода материала, дозирующий шибер для изменения подачи материала с сервоприводом в виде силового цилиндра и пневмоцилиндр для сближения и разъединения валков, отличающаяся тем, что, с целью повышения надежности и качества управления, она снабжена регулирующим трехходовым пневмоклапаном с контактирующим элементом и шарнирно установленным на станине рычагом, закрепленным другим...
Важільно-кулачкова передача

Номер патенту: 19392
Опубліковано: 25.12.1997
Автори: Обрізан Алім Олексійович, Вечеренко Віктор Ярославович
МПК: F16H 21/00
Мітки: важільно-кулачкова, передача
Формула / Реферат:
1. Рычажно-кулачковая передача, содержащая корпус, в котором соосно установлены вал с эксцентриком, вал с кривошипом, и кулачок, связанные между собой промежуточными звеньями, одно из которых выполнено в виде установленного на эксцентрике шатуна, а второе соединено с кривошипом и контактирует с кулачком, отличающаяся тем, что кулачок выполнен дисковым с внутренним рабочим профилем, а второе промежуточное звено выполнено в виде...
Попередній патент: Спосіб одержання полімерного плівкового матеріалу /варіанти/
Наступний патент: Похідні акрилової кислоти як фунгіциди, інсектициди або регулятори росту рослин
Випадковий патент: Спосіб транспортування закладного матеріалу