Датчик вигину каната
Номер патенту: 23468
Опубліковано: 25.05.2007
Автори: Казаков Володимир Олексійович, Левицький Денис Олександрович, Левицький Олександр Сергійович
Формула / Реферат
Датчик вигину каната, що містить чутливий елемент і пристрій для відключення підйомної установки, який відрізняється тим, що чутливий елемент виконано у вигляді набору кілець, нанизаних на трос і поміщених у рукав, при цьому один з кінців троса з'єднано з пристроєм для відключення підйомної установки.
Текст
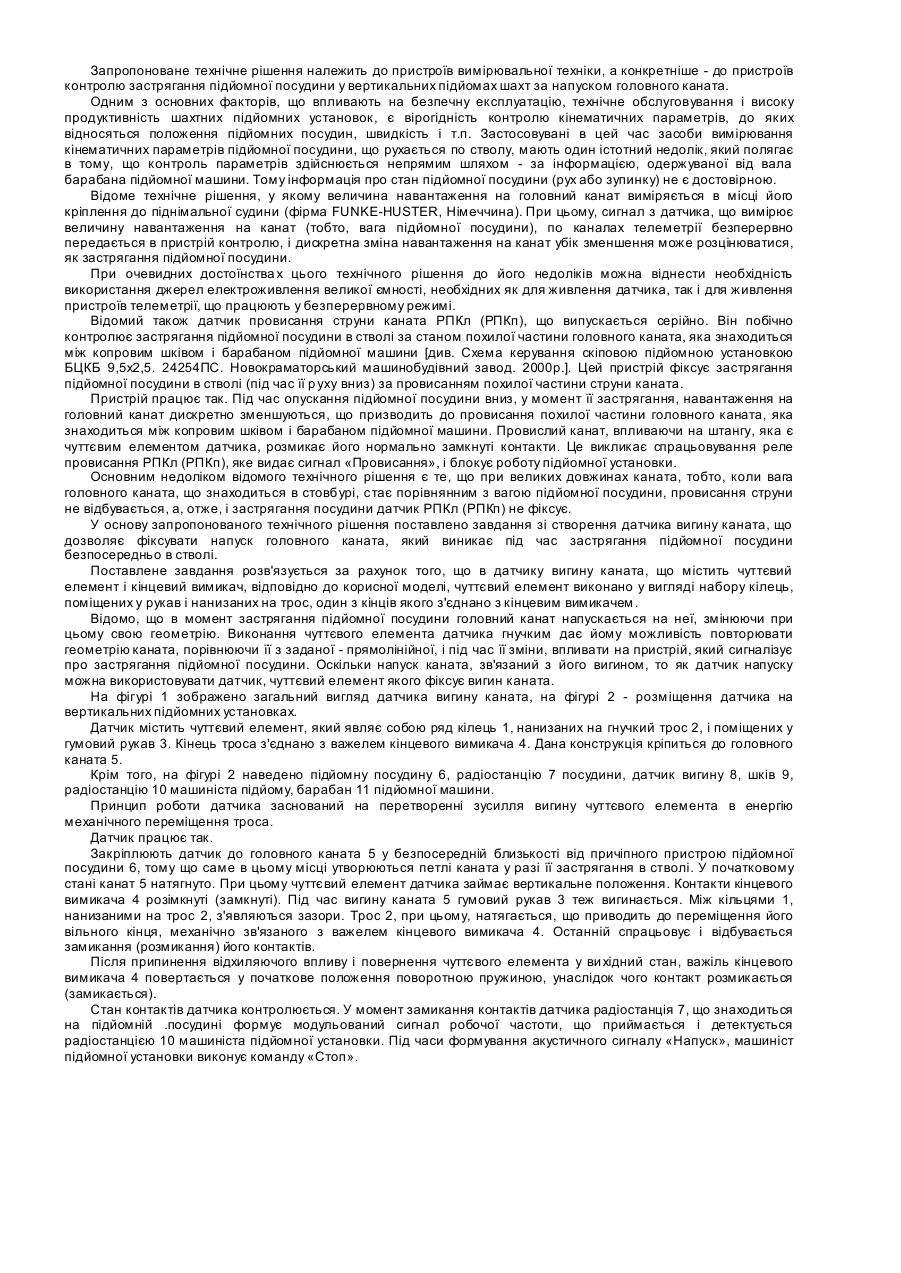
Запропоноване технічне рішення належить до пристроїв вимірювальної техніки, а конкретніше - до пристроїв контролю застрягання підйомної посудини у вертикальних підйомах шахт за напуском головного каната. Одним з основних факторів, що впливають на безпечну експлуатацію, технічне обслуговування і високу продуктивність шахтних підйомних установок, є вірогідність контролю кінематичних параметрів, до яких відносяться положення підйомних посудин, швидкість і т.п. Застосовувані в цей час засоби вимірювання кінематичних параметрів підйомної посудини, що рухається по стволу, мають один істотний недолік, який полягає в тому, що контроль параметрів здійснюється непрямим шляхом - за інформацією, одержуваної від вала барабана підйомної машини. Тому інформація про стан підйомної посудини (рух або зупинку) не є достовірною. Відоме технічне рішення, у якому величина навантаження на головний канат виміряється в місці його кріплення до піднімальної судини (фірма FUNKE-HUSTER, Німеччина). При цьому, сигнал з датчика, що вимірює величину навантаження на канат (тобто, вага підйомної посудини), по каналах телеметрії безперервно передається в пристрій контролю, і дискретна зміна навантаження на канат убік зменшення може розцінюватися, як застрягання підйомної посудини. При очевидних достоїнства х цього технічного рішення до його недоліків можна віднести необхідність використання джерел електроживлення великої ємності, необхідних як для живлення датчика, так і для живлення пристроїв телеметрії, що працюють у безперервному режимі. Відомий також датчик провисання струни каната РПКл (РПКп), що випускається серійно. Він побічно контролює застрягання підйомної посудини в стволі за станом похилої частини головного каната, яка знаходиться між копровим шківом і барабаном підйомної машини [див. Схема керування скіповою підйомною установкою БЦКБ 9,5х2,5. 24254ПС. Новокраматорський машинобудівний завод. 2000p.]. Цей пристрій фіксує застрягання підйомної посудини в стволі (під час її р уху вниз) за провисанням похилої частини струни каната. Пристрій працює так. Під час опускання підйомної посудини вниз, у момент її застрягання, навантаження на головний канат дискретно зменшуються, що призводить до провисання похилої частини головного каната, яка знаходиться між копровим шківом і барабаном підйомної машини. Провислий канат, впливаючи на штангу, яка є чуттєвим елементом датчика, розмикає його нормально замкнуті контакти. Це викликає спрацьовування реле провисання РПКл (РПКп), яке видає сигнал «Провисання», і блокує роботу підйомної установки. Основним недоліком відомого технічного рішення є те, що при великих довжинах каната, тобто, коли вага головного каната, що знаходиться в стовбурі, стає порівнянним з вагою підйомної посудини, провисання струни не відбувається, а, отже, і застрягання посудини датчик РПКл (РПКп) не фіксує. У основу запропонованого технічного рішення поставлено завдання зі створення датчика вигину каната, що дозволяє фіксувати напуск головного каната, який виникає під час застрягання підйомної посудини безпосередньо в стволі. Поставлене завдання розв'язується за рахунок того, що в датчику вигину каната, що містить чуттєвий елемент і кінцевий вимикач, відповідно до корисної моделі, чуттєвий елемент виконано у вигляді набору кілець, поміщених у рукав і нанизаних на трос, один з кінців якого з'єднано з кінцевим вимикачем. Відомо, що в момент застрягання підйомної посудини головний канат напускається на неї, змінюючи при цьому свою геометрію. Виконання чуттєвого елемента датчика гнучким дає йому можливість повторювати геометрію каната, порівнюючи її з заданої - прямолінійної, і під час її зміни, впливати на пристрій, який сигналізує про застрягання підйомної посудини. Оскільки напуск каната, зв'язаний з його вигином, то як датчик напуску можна використовувати датчик, чуттєвий елемент якого фіксує вигин каната. На фігурі 1 зображено загальний вигляд датчика вигину каната, на фігурі 2 - розміщення датчика на вертикальних підйомних установках. Датчик містить чуттєвий елемент, який являє собою ряд кілець 1, нанизаних на гнучкий трос 2, і поміщених у гумовий рукав 3. Кінець троса з'єднано з важелем кінцевого вимикача 4. Дана конструкція кріпиться до головного каната 5. Крім того, на фігурі 2 наведено підйомну посудину 6, радіостанцію 7 посудини, датчик вигину 8, шків 9, радіостанцію 10 машиніста підйому, барабан 11 підйомної машини. Принцип роботи датчика заснований на перетворенні зусилля вигину чуттєвого елемента в енергію механічного переміщення троса. Датчик працює так. Закріплюють датчик до головного каната 5 у безпосередній близькості від причіпного пристрою підйомної посудини 6, тому що саме в цьому місці утворюються петлі каната у разі її застрягання в стволі. У початковому стані канат 5 натягнуто. При цьому чуттєвий елемент датчика займає вертикальне положення. Контакти кінцевого вимикача 4 розімкнуті (замкнуті). Під час вигину каната 5 гумовий рукав 3 теж вигинається. Між кільцями 1, нанизаними на трос 2, з'являються зазори. Трос 2, при цьому, натягається, що приводить до переміщення його вільного кінця, механічно зв'язаного з важелем кінцевого вимикача 4. Останній спрацьовує і відбувається замикання (розмикання) його контактів. Після припинення відхиляючого впливу і повернення чуттєвого елемента у ви хідний стан, важіль кінцевого вимикача 4 повертається у початкове положення поворотною пружиною, унаслідок чого контакт розмикається (замикається). Стан контактів датчика контролюється. У момент замикання контактів датчика радіостанція 7, що знаходиться на підйомній .посудині формує модульований сигнал робочої частоти, що приймається і детектується радіостанцією 10 машиніста підйомної установки. Під часи формування акустичного сигналу «Напуск», машиніст підйомної установки виконує команду «Стоп».
ДивитисяДодаткова інформація
Назва патенту англійськоюCable bend detector
Автори англійськоюLevytskyi Oleksandr Serhiiovych, Kazakov Volodymyr Oleksiiovych
Назва патенту російськоюДатчик изгиба троса
Автори російськоюЛевицкий Александр Сергеевич, Казаков Владимир Алексеевич
МПК / Мітки
МПК: G01L 5/04
Код посилання
<a href="https://ua.patents.su/2-23468-datchik-viginu-kanata.html" target="_blank" rel="follow" title="База патентів України">Датчик вигину каната</a>
Пристрій для контролю натягу каната
Номер патенту: 22452
Опубліковано: 25.04.2007
Автори: Левицький Олександр Сергійович, Левицький Денис Олександрович, Бережинський Володимир Ізраїлевич, Бабков Світозар Всеволодович
МПК: B66C 5/00
Мітки: натягу, пристрій, каната, контролю
Формула / Реферат:
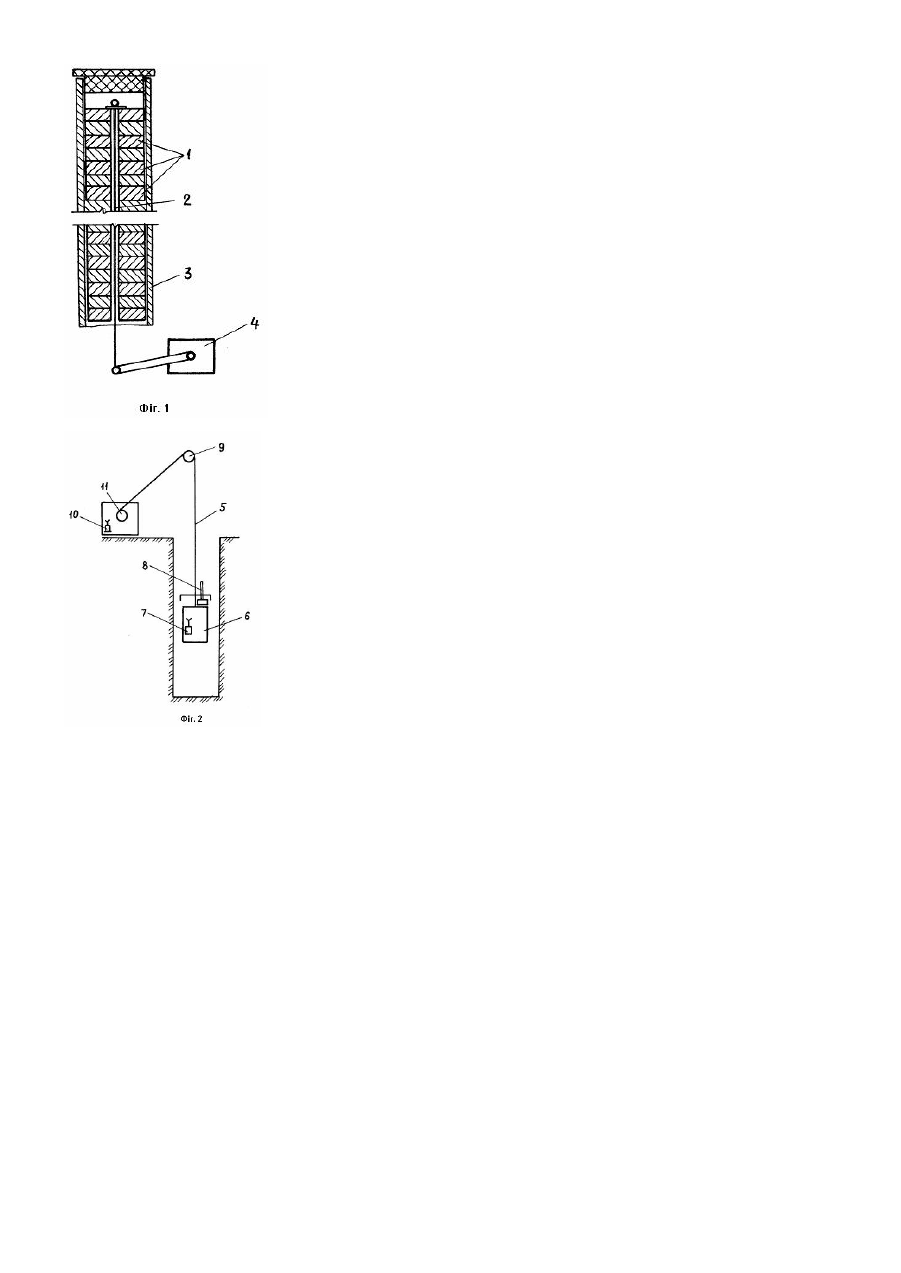
Пристрій для контролю натягу каната, що містить вимірник натягу каната, який відрізняється тим, що він обладнаний датчиком для вимірювання довжини каната, що знаходиться в стволі, а вимірник натягу каната містить відхильний шків і трансформатор тиску з манометричним датчиком.
Спосіб заміни каната в пристроях з поліспастним робочим органом
Номер патенту: 22351
Опубліковано: 25.04.2007
Автори: Воропай Андрій Анатолійович, Півень Володимир Олександрович, Артамонов Олександр Васильович, Єпімахов Андрій Павлович
МПК: B66B 19/00
Мітки: органом, каната, спосіб, заміни, поліспастним, робочим, пристроях
Формула / Реферат:
1. Спосіб заміни каната в пристроях з поліспастним робочим органом, який включає звільнення зношеного каната від кріплення на напірному барабані поліспастного робочого органа, з'єднання каната лебідки з одним з кінців зношеного каната і з'єднання нового каната з іншим кінцем зношеного каната, змотування зношеного каната з поліспастного робочого органа і запасування нового каната, звільнення нового каната від з'єднання із зношеним канатом і...
Спосіб віддалення з свеодловини каротажного кабеля або каната
Номер патенту: 32779
Опубліковано: 15.02.2001
Автори: Пустовойтенко Іван Павлович, Калина Леон Михайлович
МПК: E21B 31/00
Мітки: каротажного, каната, віддалення, свеодловини, спосіб, кабеля
Формула / Реферат:
Спосіб видалення з свердловини каротажного кабелю або каната при руйнуванні його механічним шляхом, який відрізняється тим, що каротажний кабель або канат, які залишилися в свердловині, проштовхують до якомога більшої глибини, заливають над ними розчин, що швидко тужавіє, і під тиском або під власною вагою розміщують його в зоні знаходження каротажного кабеля чи каната, витримують його в стані спокою до створення твердої металевоцементної...
Пристрій для кріплення каната на барабані лебідки
Номер патенту: 72902
Опубліковано: 16.05.2005
Автори: Орленко Юрій Володимирович, Вільк Тадей Андрійович, Коваленко Володимир Ілліч, Хом'як Роман Ілліч, Швідлер Олександр Петрович
МПК: B66D 1/28
Мітки: каната, кріплення, лебідки, барабані, пристрій
Формула / Реферат:
1. Пристрій для кріплення каната на барабані лебідки, що містить притискний елемент з гвинтом, змонтований з зовнішньої сторони реборди, рівчак для каната і отвір для виведення каната з робочої зони барабана на зовнішню сторону реборди, який відрізняється тим, що притискний елемент виконаний у вигляді зрізаного конуса з центральним отвором, діаметр зрізу конуса менший за мінімально допустимий внутрішній діаметр торової поверхні зігнутого...
Пристрій для видалення вологи з каната потоками повітря
Номер патенту: 45169
Опубліковано: 15.03.2005
Автори: Заболотний Констянтин Сергійович, Зінов'єв Сергій Миколайович
МПК: B66B 7/12
Мітки: потоками, каната, вологи, видалення, повітря, пристрій
Формула / Реферат:
Пристрій для видалення вологи з каната потоками повітря, який містить корпус з співвісними отворами, через які пропущений канат, відвідний патрубок, який відрізняється тим, що містить елементи, що охоплюють канат, які виконані у вигляді кілець для спрямування і формування потоків повітря, кожне з яких розміщене на корпусі навпроти відповідного отвору з можливістю переміщення відносно корпуса і каната.
Попередній патент: Гімнастична перекладка
Випадковий патент: Спосіб корекції діастазу прямих м'язів живота при абдомінопластиці