Спосіб вимірювання відстаней у водному середовищі
Номер патенту: 27648
Опубліковано: 12.11.2007
Автори: Куреньов Юрій Петрович, Бурачек Всеволод Германович, Боровий Валентин Олександрович, Мамонтова Людмила Степанівна
Формула / Реферат
Спосіб вимірювання відстаней у водному середовищі, який заснований на застосуванні методу імпульсної гідролокації, який відрізняється тим, що частоту імпульсів, які випромінюються, змінюють таким чином, щоб результуюча частота прийнятих імпульсів, які складаються з відбитих від підводного об'єкта та випромінюваних, була подвоєною відносно частоти випромінюваних імпульсів; при цьому результуючу частоту ділять навпіл і порівнюють одержану частоту з частотою випромінюваних імпульсів, фіксуючи співпадання цих частот, а відстань визначають за формулою:
2S=vn/2w, де
S - відстань в водному середовищі або глибина, v - швидкість поширення ультразвуку в воді, w - частота прийнятих імпульсів (прямих і відбитих), n - кількість повних довжин хвиль при частоті w, що укладаються в вимірюваній відстані S, при цьому n підбирають шляхом ітерацій до отримання значення S, враховуючи, що n - непарне число.
Текст
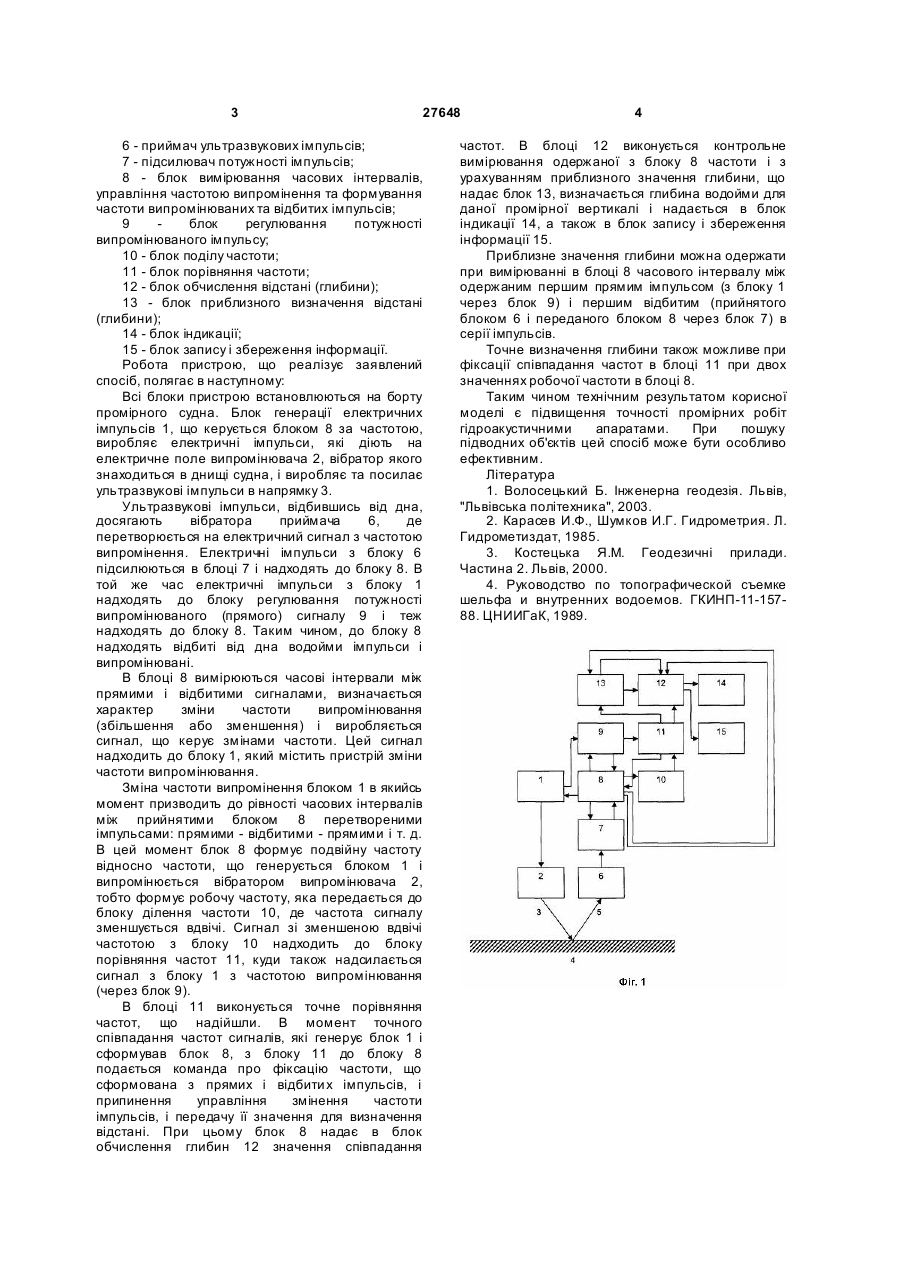
Спосіб вимірювання відстаней у водному середовищі, який заснований на застосуванні методу імпульсної гідролокації, який відрізняє ться тим, що частоту імпульсів, які випромінюються, змінюють таким чином, щоб результуюча частота прийнятих імпульсів, які 3 27648 6 - приймач ультразвукових імпульсів; 7 - підсилювач потужності імпульсів; 8 - блок вимірювання часових інтервалів, управління частотою випромінення та формування частоти випромінюваних та відбитих імпульсів; 9 блок регулювання потужності випромінюваного імпульсу; 10 - блок поділу частоти; 11 - блок порівняння частоти; 12 - блок обчислення відстані (глибини); 13 - блок приблизного визначення відстані (глибини); 14 - блок індикації; 15 - блок запису і збереження інформації. Робота пристрою, що реалізує заявлений спосіб, полягає в наступному: Всі блоки пристрою встановлюються на борту промірного судна. Блок генерації електричних імпульсів 1, що керується блоком 8 за частотою, виробляє електричні імпульси, які діють на електричне поле випромінювача 2, вібратор якого знаходиться в днищі судна, і виробляє та посилає ультразвукові імпульси в напрямку 3. Ультразвукові імпульси, відбившись від дна, досягають вібратора приймача 6, де перетворюється на електричний сигнал з частотою випромінення. Електричні імпульси з блоку 6 підсилюються в блоці 7 і надходять до блоку 8. В той же час електричні імпульси з блоку 1 надходять до блоку регулювання потужності випромінюваного (прямого) сигналу 9 і теж надходять до блоку 8. Таким чином, до блоку 8 надходять відбиті від дна водойми імпульси і випромінювані. В блоці 8 вимірюються часові інтервали між прямими і відбитими сигналами, визначається характер зміни частоти випромінювання (збільшення або зменшення) і виробляється сигнал, що керує змінами частоти. Цей сигнал надходить до блоку 1, який містить пристрій зміни частоти випромінювання. Зміна частоти випромінення блоком 1 в якийсь момент призводить до рівності часових інтервалів між прийнятими блоком 8 перетвореними імпульсами: прямими - відбитими - прямими і т. д. В цей момент блок 8 формує подвійну частоту відносно частоти, що генерується блоком 1 і випромінюється вібратором випромінювача 2, тобто формує робочу частоту, яка передається до блоку ділення частоти 10, де частота сигналу зменшується вдвічі. Сигнал зі зменшеною вдвічі частотою з блоку 10 надходить до блоку порівняння частот 11, куди також надсилається сигнал з блоку 1 з частотою випромінювання (через блок 9). В блоці 11 виконується точне порівняння частот, що надійшли. В момент точного співпадання частот сигналів, які генерує блок 1 і сформував блок 8, з блоку 11 до блоку 8 подається команда про фіксацію частоти, що сформована з прямих і відбити х імпульсів, і припинення управління змінення частоти імпульсів, і передачу її значення для визначення відстані. При цьому блок 8 надає в блок обчислення глибин 12 значення співпадання 4 частот. В блоці 12 виконується контрольне вимірювання одержаної з блоку 8 частоти і з урахуванням приблизного значення глибини, що надає блок 13, визначається глибина водойми для даної промірної вертикалі і надається в блок індикації 14, а також в блок запису і збереження інформації 15. Приблизне значення глибини можна одержати при вимірюванні в блоці 8 часового інтервалу між одержаним першим прямим імпульсом (з блоку 1 через блок 9) і першим відбитим (прийнятого блоком 6 і переданого блоком 8 через блок 7) в серії імпульсів. Точне визначення глибини також можливе при фіксації співпадання частот в блоці 11 при двох значеннях робочої частоти в блоці 8. Таким чином технічним результатом корисної моделі є підвищення точності промірних робіт гідроакустичними апаратами. При пошуку підводних об'єктів цей спосіб може бути особливо ефективним. Література 1. Волосецький Б. Інженерна геодезія. Львів, "Львівська політехника", 2003. 2. Карасев И.Ф., Шумков И.Г. Гидрометрия. Л. Гидрометиздат, 1985. 3. Костецька Я.М. Геодезичні прилади. Частина 2. Львів, 2000. 4. Руководство по топографической съемке шельфа и внутренних водоемов. ГКИНП-11-15788. ЦНИИГаК, 1989.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring distance in aquatic environment
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Kureniov Yurii Petrovych, Mamontova Liudmyla Stepanivna
Назва патенту російськоюСпособ измерения расстояния в водной среде
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Куренев Юрий Петрович, Мамонтова Людмила Степановна
МПК / Мітки
МПК: G01S 13/00
Мітки: середовищі, спосіб, відстаней, вимірювання, водному
Код посилання
<a href="https://ua.patents.su/2-27648-sposib-vimiryuvannya-vidstanejj-u-vodnomu-seredovishhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання відстаней у водному середовищі</a>
Пристрій для вимірювання відстаней у водному середовищі
Номер патенту: 27647
Опубліковано: 12.11.2007
Автори: Мамонтова Людмила Степанівна, Боровий Валентин Олександрович, Куреньов Юрій Петрович, Бурачек Всеволод Германович
МПК: G01S 13/00
Мітки: середовищі, вимірювання, пристрій, відстаней, водному
Формула / Реферат:
Пристрій для вимірювання відстаней у водному середовищі, що містить ультразвуковий випромінювач та приймач, генератор частот ультразвукових імпульсів з блоком зміни частоти, блок обробки інформації і керування, блок вимірювання частоти, блок живлення, блок обчислення віддалі, блок збереження та захисту інформації, який відрізняється тим, що він додатково вміщує блок-змішувач частот випромінюваних і відбитих імпульсів, блок ділення частоти...
Спосіб визначення фосфатів у водному середовищі
Номер патенту: 55841
Опубліковано: 15.04.2003
Автори: Гончарук Владислав Володимирович, Максін Віктор Іванович, Зуй Олег Вікторович
МПК: G01N 21/76
Мітки: фосфатів, середовищі, визначення, спосіб, водному
Формула / Реферат:
Спосіб визначення фосфатів у водному середовищі, що включає одержання фосфорно-ванадієво-молібденової гетерополікислоти, концентрування її на паперовому фільтрі, обробку лужним розчином люмінолу та реєстрацію хемілюмінесценції, який відрізняється тим, що одержання фосфорно-ванадієво-молібденової гетерополікислоти ведуть при рН 0,8 - 1,2.
Спосіб визначення германію у водному середовищі
Номер патенту: 75505
Опубліковано: 17.04.2006
Автор: Зуй Олег Вікторович
МПК: G01N 21/76, G01N 30/00
Мітки: германію, середовищі, спосіб, визначення, водному
Формула / Реферат:
Спосіб визначення германію у водному середовищі, що включає одержання германо-ванадо-молібденової гетерополікислоти та її концентрування, обробку концентрату розчином люмінолу та реєстрацію хемілюмінесценції, який відрізняється тим, що концентрування одержаної гетерополікислоти здійснюють на паперовому фільтрі, концентрат обробляють лужним розчином (0,5-3,0)х10-3 М люмінолу з наступною реєстрацією його хемілюмінесценції.
Спосіб визначення силіцію у водному середовищі
Номер патенту: 60643
Опубліковано: 15.06.2005
Автор: Зуй Олег Вікторович
МПК: G01N 21/76, G01N 30/00
Мітки: визначення, спосіб, силіцію, середовищі, водному
Формула / Реферат:
Винахід стосується технічної області засобів захисту рослин, перевага надається, комбінації груп активної речовини з різним режимом і типом дії, які чудово підходять для використання проти бур'янових рослин у середовищі технічних культур.В усіх технічних культурах бур'янові рослини виступають як небажані конкуренти, боротьба з якими вимагає істотних витрат. Вони проростають і розростаються в землі протягом тривалого часу, тому...
Інверсійний вольтамперометричний спосіб визначення талію у водному середовищі
Номер патенту: 77482
Опубліковано: 15.12.2006
Автор: Козіна Світлана Олександрівна
МПК: G01N 27/42, G01N 27/40, G01N 27/26
Мітки: вольтамперометричний, інверсійний, талію, середовищі, визначення, водному, спосіб
Формула / Реферат:
Інверсійний вольтамперометричний спосіб визначення талію, що включає обробку аналізованої проби сірчанокислою сіллю, її нагрівання, одержання осаду, відділення останнього на фільтрі, його розчинення з одержанням фільтрату й електроліз фільтрату з наступним зніманням вольтамперограми, за величиною піку якої визначають вміст талію, який відрізняється тим, що як сірчанокислу сіль використовують сульфат марганцю(ІІ) у кількості 2.10-3 – 10-2...
Попередній патент: Пристрій для вимірювання відстаней у водному середовищі
Наступний патент: Світловіддалемірний пристрій
Випадковий патент: Пристрій для гелієво-неонової лазеротерапії