Пневматичний клиновий захват
Номер патенту: 312
Опубліковано: 30.04.1999
Автори: Парцей Василь Іванович, Білецький Мирослав Семенович, Білецький Ярослав Семенович

Формула / Реферат
Пневматичний клиновий захват, який включає втулку з двома конічними вкладишами, на похилій поверхні яких розміщені клини з пазами, в порожнині яких установлені плашки, що зв'язані болтами, який відрізняється тим, що плашки зв'язані болтами через пружину, І по периметру бокової поверхні клинових пазів виконані заглиблення під кутом 75° до опорної поверхні пазів.
Текст
Заявляється корисна модель, яка відноситься до буріння свердловин, зокрема до пристроїв для захвату І утримання труб при спуско-піднімальних операціях. Відомий клиновий захват, який включає клини і установлені на їх опорних поверхнях зажимні елементи (плашки), при цьому клини і плашки обладнані пазами, котрі виконані між опорними поверхнями, і перпендикулярні до осі стискаємої труби [Авт. св. СССР № 1183654, кл. Ε 21 В 19/10, 1985, Бюл. №37]. Проте описаний клиновий захват не призначений для механічного захвату труб при роторному бурінні, тобто для установки його в роторі. Крім того, конструктивне виконання клинового захвату не забезпечує рівномірний розподіл нагрузки в зоні контакту зажимних елементів з трубою. Найбільш близьким по технічній суті є пневматичний клиновий захват, який включає втулку з двома конічними вкладишами, на похилій поверхні яких розміщені клини з пазами, в порожнині яких установлені плашки, що зв'язані болтами [Баграмов РА Буровые машины и комплексы. М., "Недра", 1988, с. 112-114]. Недоліком такого пневматичного клинового захвату є те, що при спуско-піднімальних операціях стикові поверхні клинів і плашок розбиваються, через жорсткий зв'язок плашок та недостатню міцність стикових поверхонь, внаслідок чого, плашки виходять Із зачеплення, що приводить до їх випадання, отож до аварій в процесі буріння свердловини. В основу корисної моделі - пневматичний клиновий захват, поставлено задачу створення нового безаварійного клинового захвату шляхом надання пружно-де-формативних властивостей плашкам Із одночасним підвищенням міцності стикових поверхонь клинів і плашок, що позволяє забезпечити зниження жорсткості плашок при їх взаємодії і надійне зачеплення - усуваючи (виключаючи) випадання плашок при спуско-піднімальних операціях. Поставлена задача в запропонованій корисній моделі вирішується тим, що плашки зв'язані болтами через пружину, і по периметру бокової поверхні клинових пазів виконані заглиблення під кутом 75° до опорної поверхні пазів. Наявність суттєвих ознак в запропонованій конструкції пневматичного клинового захвату забезпечує технічний результат, зниження жорсткості плашок при їх взаємодії, за рахунок того, що болти додатково обладнані пружиною, тобто, що зв'язок між плашками І болтами здійснюється через пружину. В результаті стало можливим використання енергії пружної деформації, якою наділена пружина. Отож, при дії динамічних сил на плашки при спуско-піднімальних операціях, відбувається пом'якшення удару, через відсутність жорсткої призупинки удару (яка спостерігається в болтовому безпружинному зв'язку плашок-прототипі) внаслідок саморегулюємої фіксації (установки) набору плашок. Водночас, за рахунок того, що запропоновано по периметру на боковій поверхні клинових пазів виконати заглиблення під кутом 75° до опорної поверхні пазів, а отже відповідно, зробити відповідний косий зріз на плашках, які входять в заглиблення, що зумовлює не тільки надійне зачеплення клина Із плашками, але й запобігає розбиванню останніх, внаслідок підвищення міцності стикових поверхонь клина І плашок. Підвищення міцності стикових поверхонь було визначено, в свою чергу, за рахунок знаходження найбільшої оптимальної площі, котра несе навантаження на стиск із врахуванням необхідної площі зачеплення, тобто підвищення довговічності роботи клинів і плашок в діапазоні робочих навантажень при спуско-піднімальних операціях. При цьому знаходження найбільшої оптимальної площі, яка прямопропорційна куту заглиблення бокової поверхні клина 1 відповідно куту скосу плашок для певних типів клинових захватів, було визначено за допомогою ЕВМ та підтверджено експериментальними дослідженнями, якими було встановлено наступне: при зміні кута 75° заглиблення, в меншу сторону зменшується площа, отже міцність стиковочної поверхні, зокрема особливо носового виступу плашки, котра несе найбільше навантаження на стиск, а збільшення кута приводить до зменшення контактової (стиковочної) площі зачеплення між клином І плашкою, тобто при зміні кута в більшу/меншу сторону, хоча би на один градус відсутнє поєднання між міцністю стикових поверхонь І площею їх зачеплення. Отож, запропоновано комплексне вирішення поставленої задачі використання пружної деформації пружини І оптимізовану міцність стикових поверхонь клина і плашок, що забезпечує зниження жорсткості плашок при їх взаємодії і надійне зачеплення - усуваючи випадання плашок при спуско-піднімальних операціях. На фіг. 1 схематично зображено запропонований пневматичний клиновий захват, загальний вид; на фіг. 2 - переріз А-А на фіг. 1. Пневматичний клиновий захват для ротора складається із втулки 1 обладнаної двома конічними вкладишами 2, на похилій поверхні яких, з можливістю зворотно-поступового руху (вгору-вниз), розміщені клини 3 з пазами 4. В порожнині клинових пазів 4 установлені плашки 5, переміщення котрих обмежено заглибленням 6 (канавкою, виконаною по периметру бокової поверхні пазів 4) та болтами 7, додатково обладнаними пружинами 8. Робота запропонованого пневматичного клинового захвату здійснюється по тому ж принципу, що і у відомих пневматичних клинових захватах всіх типів, котрі установлені в роторі. А саме, при переміщенні клинів 3 вниз, поковзом по похилій поверхні вкладишів 2, вони зближуються в радіальному напрямку, та під дією радіального зусилля, що виникає в клинах З, плашки 5 затискують трубу (на фіг. не позначено), внаслідок чого колона утримується ротором. При затиску труби знижується жорсткість удару однієї із плашок 5 об трубу, за рахунок розподілу сили удару на набір плашок 5, в результаті їх саморегулюючої фіксації. Для звільнення затиснутої труби клини З переміщують наверх одночасно з колоною труб.
ДивитисяДодаткова інформація
Назва патенту англійськоюPneumatic wedge clamp
Автори англійськоюBiletskyi Yaroslav Semenovych, Biletskyi Myroslav Semenovych, Partsei Vasyl Ivanovych
Назва патенту російськоюПневматический клиновый захват
Автори російськоюБилецкий Ярослав Семенович, Билецкий Мирослав Семенович, Парцей Василий Иванович
МПК / Мітки
МПК: E21B 19/00
Мітки: клиновий, захват, пневматичний
Код посилання
<a href="https://ua.patents.su/2-312-pnevmatichnijj-klinovijj-zakhvat.html" target="_blank" rel="follow" title="База патентів України">Пневматичний клиновий захват</a>
Клиновий пас

Номер патенту: 21027
Опубліковано: 07.10.1997
Автори: Лисенко Леонід Власович, Хрупович Юрій Теодозійович, Малофієнко Микола В'ячеславович, Сичов Петро Петрович
МПК: F16G 5/00
Формула / Реферат:
Клиновий пас, що складається з несучого і еластичного елементів, який відрізняється тим, що несучий елемент паса виконаний в вигляді жорсткого стального кільця, яке в поперечному перерізі має форму трапеції, і кільце покрите еластичним шаром.
Спосіб натягування обв’язки із стрічки та захват для цього
Номер патенту: 21090
Опубліковано: 04.11.1997
Автори: Гончар Сергій Олексійович, Гончар Олексій Олексійович
МПК: B65B 13/00, B65B 63/00
Мітки: стрічки, захват, цього, обв'язки, натягування, спосіб
Формула / Реферат:
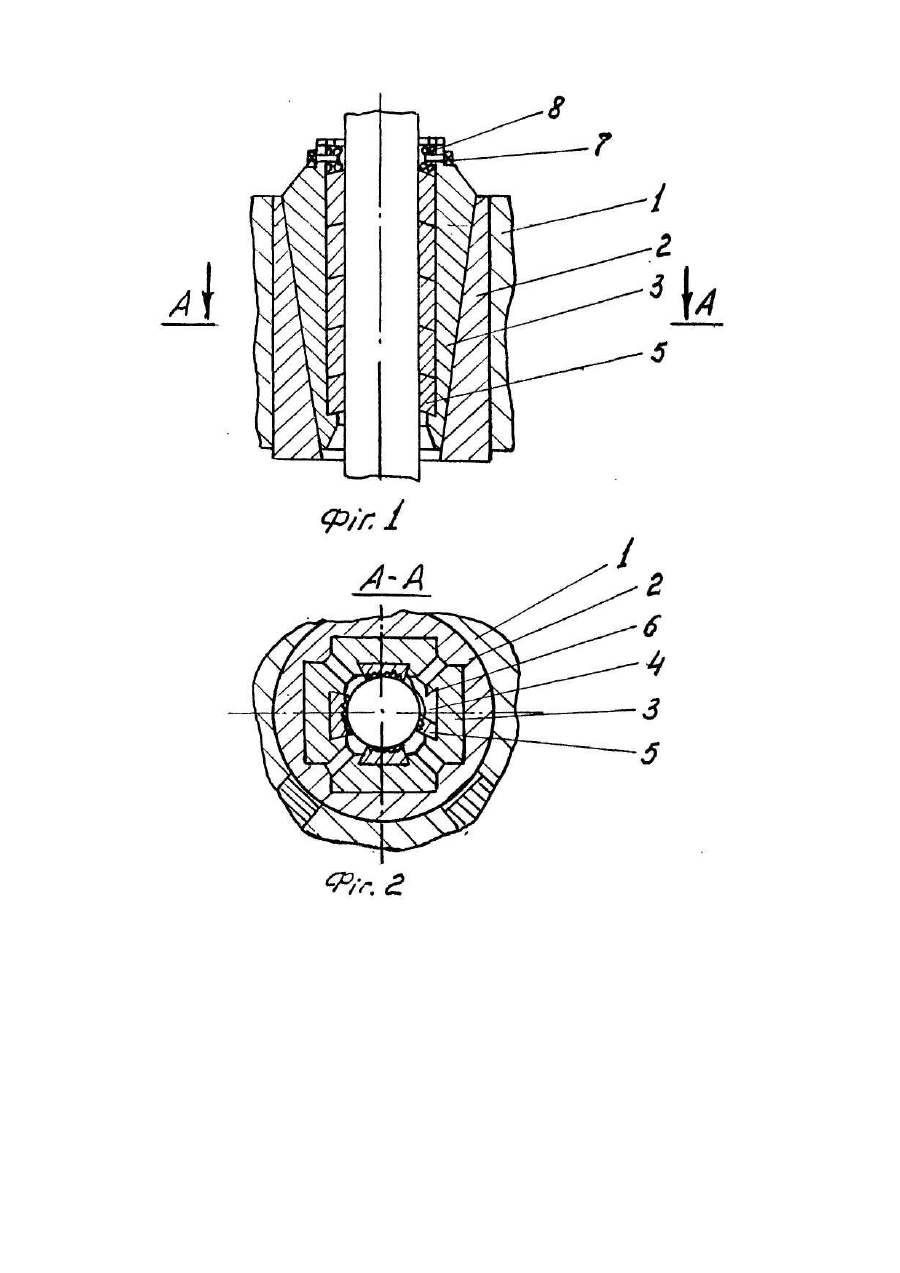
1. Спосіб натягування обв'язки Із стрічки, який передбачає натягування обв'язки шляхом повороту замка, який відрізняється тим, що замок повертають захватом, який перед натягуванням надівають на замок таким чином, що він контактує з замком на краях ексцентрика замка i не контактує з кінцем замка.2. Захват для натягування обв'язки Із стрічки виконаний у вигляді зйомного важіля, який відрізняється тим, що на одному кінці захват має дві...
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: навантажувача, захват, штирьовий
Формула / Реферат:
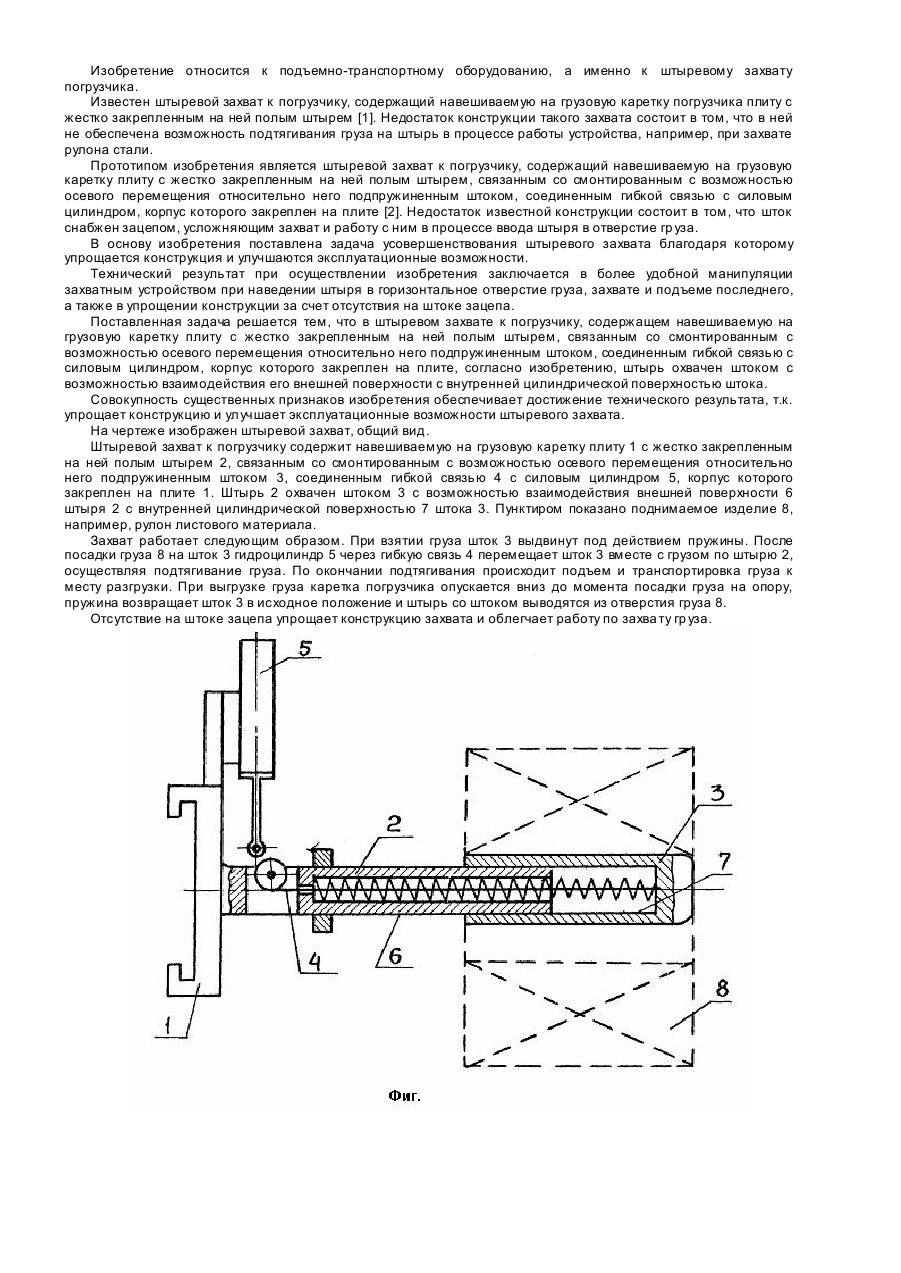
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Захват для затиску і кантування довгомірних виробів
Номер патенту: 25999
Опубліковано: 26.02.1999
Автори: Мацько Володиир Михайлович, Сурма Святослав Іванович, Старушкевич Олександр Миколайович
МПК: B66C 1/42
Мітки: довгомірних, виробів, захват, кантування, затиску
Формула / Реферат:
Захват для затиску і кантування довгомірних виробів, що містить траверсу, шарнірно з'єднані між собою кліщовини і підпружинений з одного кінця фіксуючий стержень, який відрізняється тим, що у шайбах шарнірів кліщовий виконані паралельні шарнірам отвори, співпадаючі наскрізь у замкнутому стані кліщовий, фіксуючий стержень виконаний ?-подібним і базований паралельно шарнірам у згаданих отворах, кліщовини нижньої відносно траверси пари на...
Вилочний захват для навантажувача
Номер патенту: 5421
Опубліковано: 28.12.1994
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/12
Мітки: навантажувача, вилочний, захват
Формула / Реферат:
(57) Вилочный захват для погрузчика, содержащий каретку, монтируемую на грузоподьмнике погрузчика и несущую вилы, смонтированныес возможностью синхронного вращения их зубьев навстречу друг другу зубчато-реечным механизмом, образованным шестернями, жестко закрепленными на осях вращения указан ных зубьев вил и зацепленных с зубчатыми рейками, выполненными на противолежащих сторонах, установленной с возможностью поперечного...
Попередній патент: Дифузор відцентрового компресора
Наступний патент: Головний телефон
Випадковий патент: Спосіб лікування пародонтозу