Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних
Номер патенту: 32248
Опубліковано: 12.05.2008
Автори: Антонюк Віктор Степанович, Бєлова Альона Вікторівна, Петренко Сергій Федорович
Формула / Реферат
Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних, що містить формувач світлового потоку, приймач, комп'ютер, оптичну систему, вхід якої зв'язаний з виходом формувача світлового потоку, а вихід з приймачем, який відрізняється тим, що оптична система виконана у вигляді мікроскопа, який спряжено з приймачем, що являє собою телевізійну камеру, вихід якої з'єднаний з комп'ютером, який з'єднаний із входом додатково введеного контролера, який в свою чергу з'єднаний з п'єзоелектричним двигуном через датчик лінійних переміщень, які є складовими лінійної прецизійної напрямної.
Текст
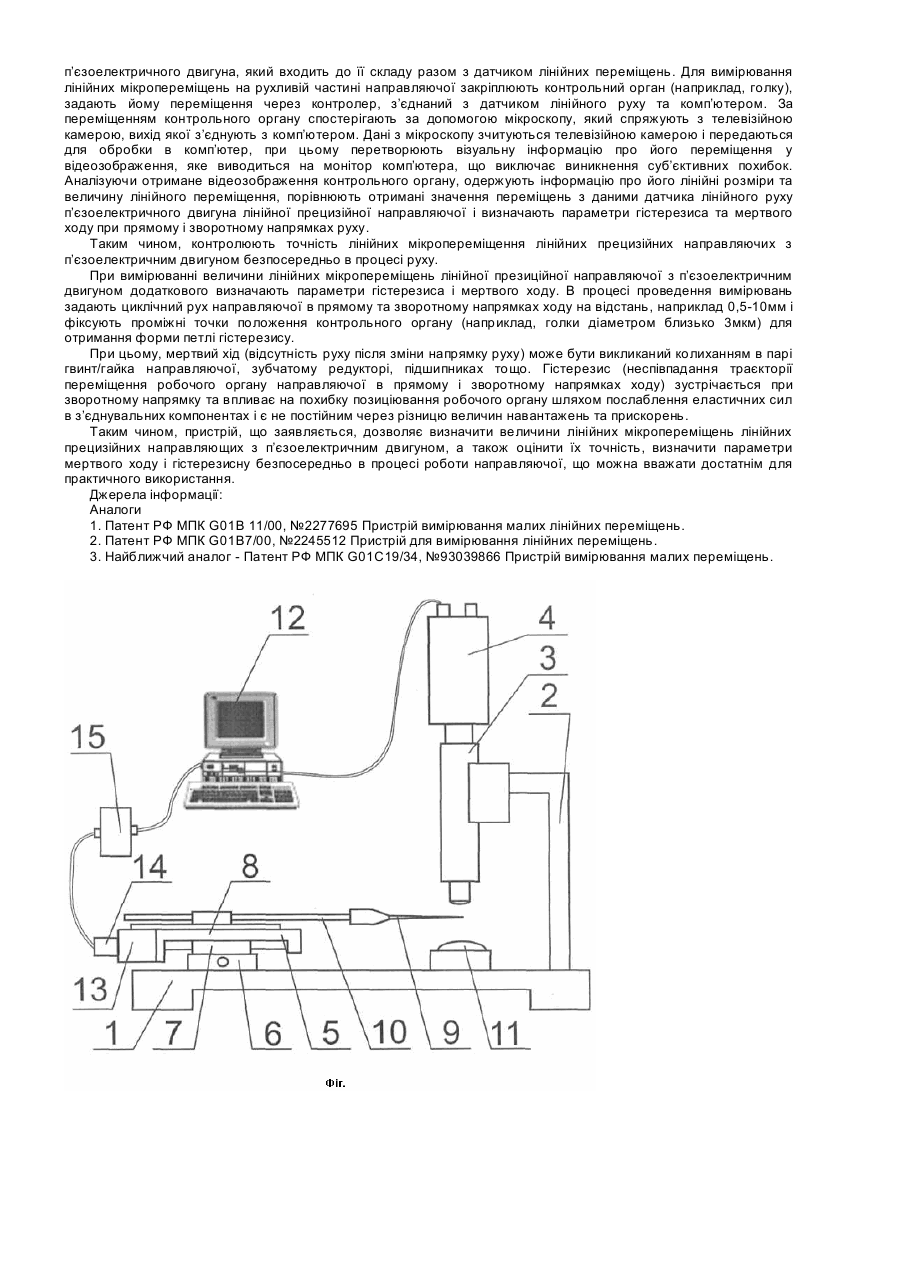
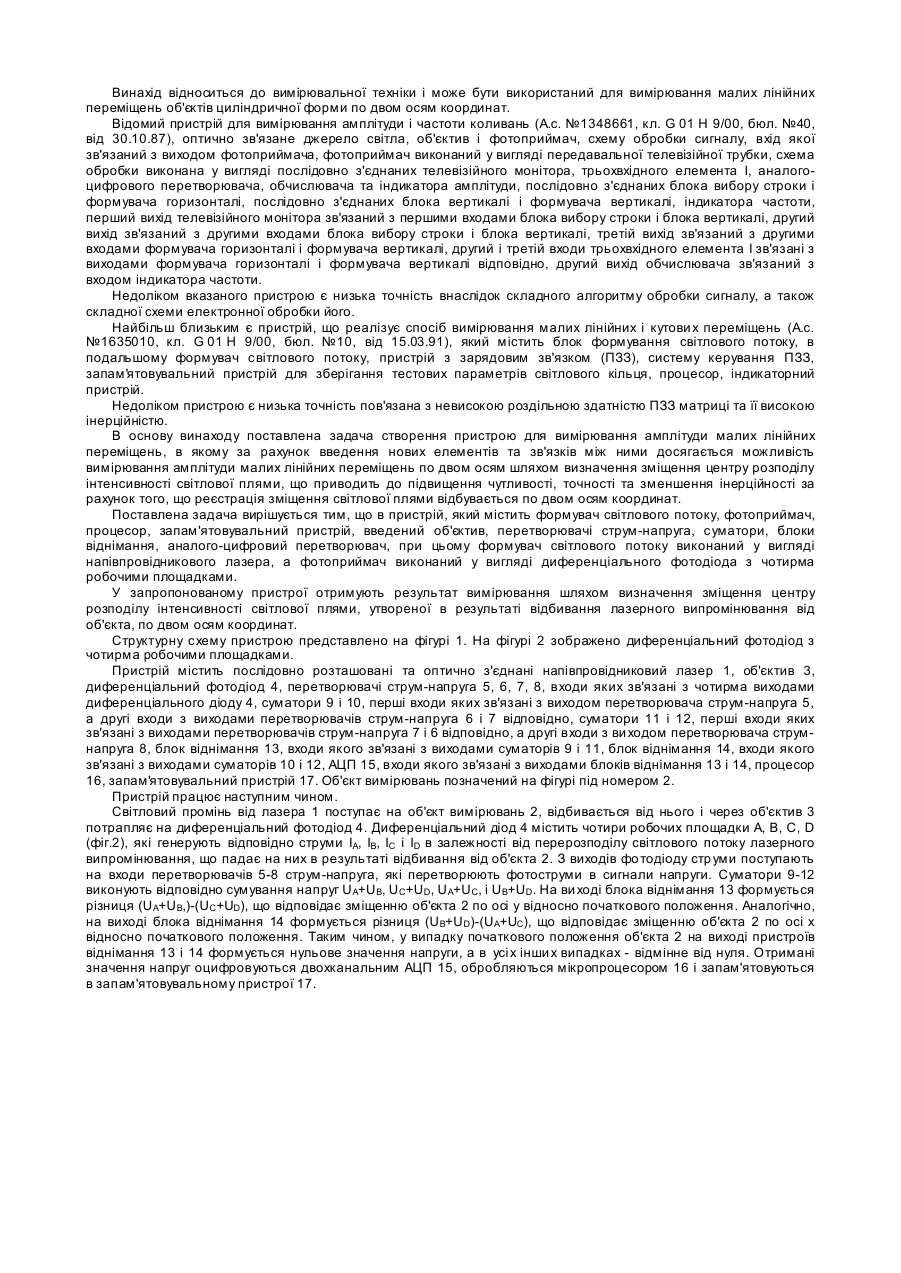
Корисна модель відноситься до вимірювальної техніки, а саме до вимірювань лінійних переміщень, зокрема, до визначення лінійних мікропереміщень прецизійних лінійних направляющих з п’єзоелектричним двигуном. Відомий пристрій вимірювання малих лінійних переміщень [Патент РФ №2277695, G01B11/00, Пристрій для вимірювання малих лінійних переміщень, опублікований 06.10.2006р.], суть якого полягає в тому, що пристрій для вимірювання малих лінійних переміщень містить дві фазові дифракційні решітки, щуп, який вводиться в контакт з досліджуваним зразком, систему просвічування решіток лазерним пучком, що складається з лазера з коліматором променя, просторового фільтра і фотодіода, вимірювач вихідної напруги, дифракційні решітки, нанесені на двох протилежних паралельних сторонах прозорого блоку, блок закріплений на осі, має ступінь свободи повороту щодо цієї осі і зв’язаний з щупом так, що вектор переміщення, що впливає на щуп проходить на деякій відстані від осі обертання блоку, а система просвічування решіток встановлена на окремій поворотній підставі, яка зв’язана з регулювальним механізмом. Недоліком відомого пристрою визначення величини лінійних переміщень слід вважати неможливість проводити безперервні вимірювання в процесі руху, а також складність конструкції. Відомий пристрій для вимірювання лінійних переміщень, [Патент на корисну модель №16116, G01B 9/00, Пристрій для вимірювання лінійних переміщень, опублікований 17.07.2006], суть якого полягає в тому, що пристрій містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", з іншого боку верхньої пластини приєднаний за допомогою гнучкої в’язки датчик лінійних переміщень, який з’єднано з аналого-цифровим перетворювачем. Недоліком відомого пристрою вимірювання лінійних переміщень є невисока точність вимірювання переміщень, а також значна інерційність. Найбільш близький до запропонованого пристрою за сукупністю ознак є відомий багатоканальний пристрій для вимірювання і реєстрації лінійних переміщень, [Патент на корисну модель №68904 A, G01B 11/08, Пристрій для вимірювання амплітуди малих лінійних переміщень, опублікований 16.08.2004], суть якого полягає в тому, що пристрій містить формувач світлового потоку, фотоприймач (приймач), процесор, запам’ятовуючий пристрій (комп’ютер), додатково введений об’єктив (оптична система), вхід якого зв’язаний з виходом формувача світлового потоку, а вихід з фотоприймачем, чотири перетворювачі струм-напруга, входи яких зв’язані з чотирма виходами фотоприймача, чотири суматори, в яких перші входи першого та другого суматорів зв’язані з виходом першого перетворювача струм-напруга, а другі входи - з виходами другого і третього перетворювача струмнапруга відповідно, перші входи третього та четвертого суматорів зв’язані з виходами третього та другого перетворювача струм-напруга відповідно, а другі входи - з виходом четвертого перетворювача струм-напруга, два блоки віднімання, в яких входи першого зв’язані з виходами першого і третього суматорів, а входи другого блока віднімання - з виходами другого і четвертого суматорів, аналого-цифровий перетворювач, входи якого зв’язані з виходами блоків віднімання, при цьому формувач світлового потоку виконаний у вигляді напівпровідникового лазера, а фотоприймач виконаний у вигляді диференціального фотодіода з чотирма робочими площадками. Недоліками цього способу є неможливість проводити безперервні вимірювань лінійних переміщень направляючих з п’єзоелектричним двигуном. В основу корисної моделі поставлено задачу створення пристрою для контролю величини лінійних мікропереміщень направляючих з п’єзоелектричним двигуном, а також параметрів мертвого ходу та гістерезису, шляхом проведення безперервних вимірювань в процесі роботи лінійної прецизійної направляючої. Поставлена задача вирішується тим, що пристрій контролю лінійних мікропереміщень прецизійних лінійних направляючих містить формувач світлового потоку, приймач, комп’ютер, оптичну систему, вхід якої зв’язаний з виходом формувача світлового потоку, а вихід з приймачем, новим є те, що оптична система виконана у вигляді мікроскопу, який спряжено з приймачем, що представляє собою телевізійну камеру, яка з’єднана з комп’ютером, вихід якого з’єднано зі входом додатково введеного контролера, який в свою чергу з’єднаний з п’єзоелектричним двигуном через датчик лінійних переміщень, які є складовими лінійної прецизійної направляючої. На кресленні зображено пристрій контролю лінійних мікропереміщень прецизійних лінійних направляющих з п’єзоелектричним двигуном. Пристрій складається зі станини 1 на якій закріплено штатив 2, з мікроскопом 3, що спряжений з телевізійною камерою 4. На станині 1 жорстко закріплена лінійна прецизійна направляюча 5, таким чином, що в лещатах 6 нерухомо відносно станини затиснуто рухливий столик 7 направляючої 5, при цьому лінійні переміщення здійснює корпус 8 направляючої 5. Контрольний орган 9 жорстко закріплено на корпусі 8 направляючої 5 за допомогою тримача 10. Крім того на станині 1 розміщено освітлювальну систему 11. Телевізійна камера 4 з’єднана з комп’ютером 12. П’єзоелектричний двигун 13 лінійної направляючої 5 з датчиком лінійного руху 14 з’єднаний з контролером 15 і комп’ютером 12. Принцип роботи пристрою. За допомогою комп’ютера 12 через контролер 15, датчик лінійного руху 14 та п’єзоелектричний двигун 13 лінійній направляючій 5 задається величина переміщення, при цьому корпус 8 направляючої 5 здійснює лінійні переміщення відносно нерухомої станини 1. Контрольний орган 9 жорстко закріплений на корпусі 8 направляючої 5 таким чином, що повністю повторює рухи корпусу 8. В процесі руху датчик лінійного руху 14 не фіксує реального переміщення безпосередньо контрольного органу 9. Візуальну інформацію про переміщення контрольного органу 9 перетворюють у відеозображення за допомогою мікроскопу 3 та спряженої з ним телевізійної камери 4. Дані з телевізійної камери 4 передаються для обробки в комп’ютер 12 та виводяться на екран монітора комп’ютера 12. Аналізуючи відеозображення контрольного органу 9, наприклад, голки, отримують дані про розміри голки та величину лінійного переміщення її по двом координатам. Порівнюють отримані значення переміщень голки з даними датчика лінійного руху 14 п’єзоелектричного двигуна 13 лінійної направляючої 5 і, в результаті чого, визначають параметри гістерезиса та мертвого ходу направляючої 5 в прямому і зворотному напрямках руху. Сутність пристрою полягає в тому, що переміщення направляючої здійснюються за допомогою п’єзоелектричного двигуна, який входить до її складу разом з датчиком лінійних переміщень. Для вимірювання лінійних мікропереміщень на рухливій частині направляючої закріплюють контрольний орган (наприклад, голку), задають йому переміщення через контролер, з’єднаний з датчиком лінійного руху та комп’ютером. За переміщенням контрольного органу спостерігають за допомогою мікроскопу, який спряжують з телевізійною камерою, вихід якої з’єднують з комп’ютером. Дані з мікроскопу зчитуються телевізійною камерою і передаються для обробки в комп’ютер, при цьому перетворюють візуальну інформацію про його переміщення у відеозображення, яке виводиться на монітор комп’ютера, що виключає виникнення суб’єктивних похибок. Аналізуючи отримане відеозображення контрольного органу, одержують інформацію про його лінійні розміри та величину лінійного переміщення, порівнюють отримані значення переміщень з даними датчика лінійного руху п’єзоелектричного двигуна лінійної прецизійної направляючої і визначають параметри гістерезиса та мертвого ходу при прямому і зворотному напрямках руху. Таким чином, контролюють точність лінійних мікропереміщення лінійних прецизійних направляючих з п’єзоелектричним двигуном безпосередньо в процесі руху. При вимірюванні величини лінійних мікропереміщень лінійної презиційної направляючої з п’єзоелектричним двигуном додаткового визначають параметри гістерезиса і мертвого ходу. В процесі проведення вимірювань задають циклічний рух направляючої в прямому та зворотному напрямках ходу на відстань, наприклад 0,5-10мм і фіксують проміжні точки положення контрольного органу (наприклад, голки діаметром близько 3мкм) для отримання форми петлі гістерезису. При цьому, мертвий хід (відсутність руху після зміни напрямку руху) може бути викликаний колиханням в парі гвинт/гайка направляючої, зубчатому редукторі, підшипниках тощо. Гістерезис (неспівпадання траєкторії переміщення робочого органу направляючої в прямому і зворотному напрямках ходу) зустрічається при зворотному напрямку та впливає на похибку позиціювання робочого органу шляхом послаблення еластичних сил в з’єднувальних компонентах і є не постійним через різницю величин навантажень та прискорень. Таким чином, пристрій, що заявляється, дозволяє визначити величини лінійних мікропереміщеньлінійних прецизійних направляющих з п’єзоелектричним двигуном, а також оцінити їх точність, визначити параметри мертвого ходу і гістерезисну безпосередньо в процесі роботи направляючої, що можна вважати достатнім для практичного використання. Джерела інформації: Аналоги 1. Патент РФ МПК G01B 11/00, №2277695 Пристрій вимірювання малих лінійних переміщень. 2. Патент РФ МПК G01B7/00, №2245512 Пристрій для вимірювання лінійних переміщень. 3. Найближчий аналог - Патент РФ МПК G01C19/34, №93039866 Пристрій вимірювання малих переміщень.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of linear micro-displacements of precision linear guides
Автори англійськоюBelova Aliona Viktorivna, Petrenko Serhii Fedorovych, Antoniuk Viktor Stepanovych
Назва патенту російськоюУстройство контроля линейных микроперемещений прецизионных линейных направляющих
Автори російськоюБелова Алена Викторовна, Петренко Сергей Федорович, Антонюк Виктор Степанович
МПК / Мітки
МПК: G01B 11/00
Мітки: напрямних, мікропереміщень, контролю, пристрій, лінійних, прецизійних
Код посилання
<a href="https://ua.patents.su/2-32248-pristrijj-kontrolyu-linijjnikh-mikroperemishhen-precizijjnikh-linijjnikh-napryamnikh.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних</a>
Спосіб контролю лінійних мікропереміщень прецизійних направляючих
Номер патенту: 31536
Опубліковано: 10.04.2008
Автори: Антонюк Віктор Степанович, Петренко Сергій Федорович, Бєлова Альона Вікторівна
МПК: G01B 11/00
Мітки: контролю, спосіб, направляючих, прецизійних, лінійних, мікропереміщень
Формула / Реферат:
1. Спосіб контролю лінійних мікропереміщень прецизійних направляючих, що включає приймання інформації від об'єкта, що переміщується, та визначення величини лінійних переміщень на підставі її аналізу, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується, візуальну інформацію про фактичне лінійне переміщення об'єкта перетворюють у відеозображення, попередньо...
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу
Номер патенту: 31199
Опубліковано: 25.03.2008
Автори: Антонюк Віктор Степанович, Бєлова Альона Вікторівна, Петренко Сергій Федорович
МПК: G01B 11/00
Мітки: напрямних, спосіб, контролю, прямолінійність, ходу, лінійних, прецизійних
Формула / Реферат:
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу, що включає формування світлового потоку, отримання зображення перехрестя автоколімаційної зорової труби, приймання віддзеркаленого зображення перехрестя, суміщення його з сіткою, а також здійснення переміщень об'єкта вздовж осі руху, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується,...
Пристрій для вимірювання лінійних переміщень

Номер патенту: 16116
Опубліковано: 17.07.2006
Автори: Дуб Володимир Васильович, Чеканов Микола Анатолійович, Червоний Віталій Миколайович, Постнов Генадій Михайлович
МПК: G01B 9/00
Мітки: пристрій, лінійних, переміщень, вимірювання
Формула / Реферат:
Пристрій для вимірювання лінійних переміщень, що містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", який відрізняється тим, що з іншого боку верхньої пластини приєднаний за допомогою гнучкої в'язки датчик лінійних переміщень, який з'єднано з аналого-цифровим перетворювачем.
Пристрій для вимірювання амплітуди малих лінійних переміщень
Номер патенту: 68904
Опубліковано: 16.08.2004
Автори: Білинський Йосип Йосипович, Білинська Марина Йосипівна, Кухарчук Василь Васильович
МПК: G01B 11/08, G01B 21/00, G01B 9/00, G01H 9/00
Мітки: переміщень, вимірювання, пристрій, амплітуди, малих, лінійних
Формула / Реферат:
Пристрій для вимірювання амплітуди малих лінійних переміщень, що містить формувач світлового потоку, фотоприймач, процесор, запам'ятовуючий пристрій, який відрізняється тим, що в нього введений об'єктив, вхід якого зв'язаний з виходом формувача світлового потоку, а вихід з фотоприймачем, чотири перетворювачі струм-напруга, входи яких зв'язані з чотирма виходами фотоприймача, чотири суматори, в яких перші входи першого та другого суматорів...
Пристрій для вимірювання лінійних параметрів тіла комах
Номер патенту: 26948
Опубліковано: 10.10.2007
Автор: Фокін Андрій Володимирович
МПК: A01M 3/00
Мітки: вимірювання, параметрів, комах, пристрій, лінійних, тіла
Формула / Реферат:
Пристрій для вимірювання лінійних параметрів тіла комах, що включає дерев'яну основу з нанесеною шкалою, який відрізняється тим, що до основи, розміром 2х5 см з нанесеними двома взаємно перпендикулярними шкалами з кроком 0,5 мм, кріплять паралельні прозорі пластикові стінки 2,5х1 см, з трьома прорізями висотою 0,7 см і шириною 0,5 мм, по висоті яких нанесені шкали з кроком 0,5 мм і через які вставлені сталеві струни довжиною 2,5 см з кульками...
Попередній патент: Суміш для приготування спеціальних рідин
Наступний патент: Пристрій для контролю відхилень від прямолінійності прецизійних лінійних напрямних
Випадковий патент: Пристрій для розкривання ампул "панампул"