Пристрій для контролю відхилень від прямолінійності прецизійних лінійних напрямних
Номер патенту: 32249
Опубліковано: 12.05.2008
Автори: Петренко Сергій Федорович, Бєлова Альона Вікторівна, Антонюк Віктор Степанович


Формула / Реферат
Пристрій для контролю відхилень від прямолінійності прецизійних лінійних напрямних, що містить освітлювальну систему, плоскопаралельне дзеркало, закріплене на рухливому столику напрямної, який здійснює переміщення, та автоколімаційну зорову трубу, встановлену перпендикулярно відбиваючій площині дзеркала, який відрізняється тим, що до складу лінійної напрямної входить п'єзоелектричний двигун та датчик лінійних переміщень, додатково введено телевізійну камеру, вхід якої спряжений з автоколіматором, а вихід з комп'ютером, який з'єднаний із входом контролера, зв'язаним з п'єзоелектричним двигуном через датчик лінійних переміщень.
Текст
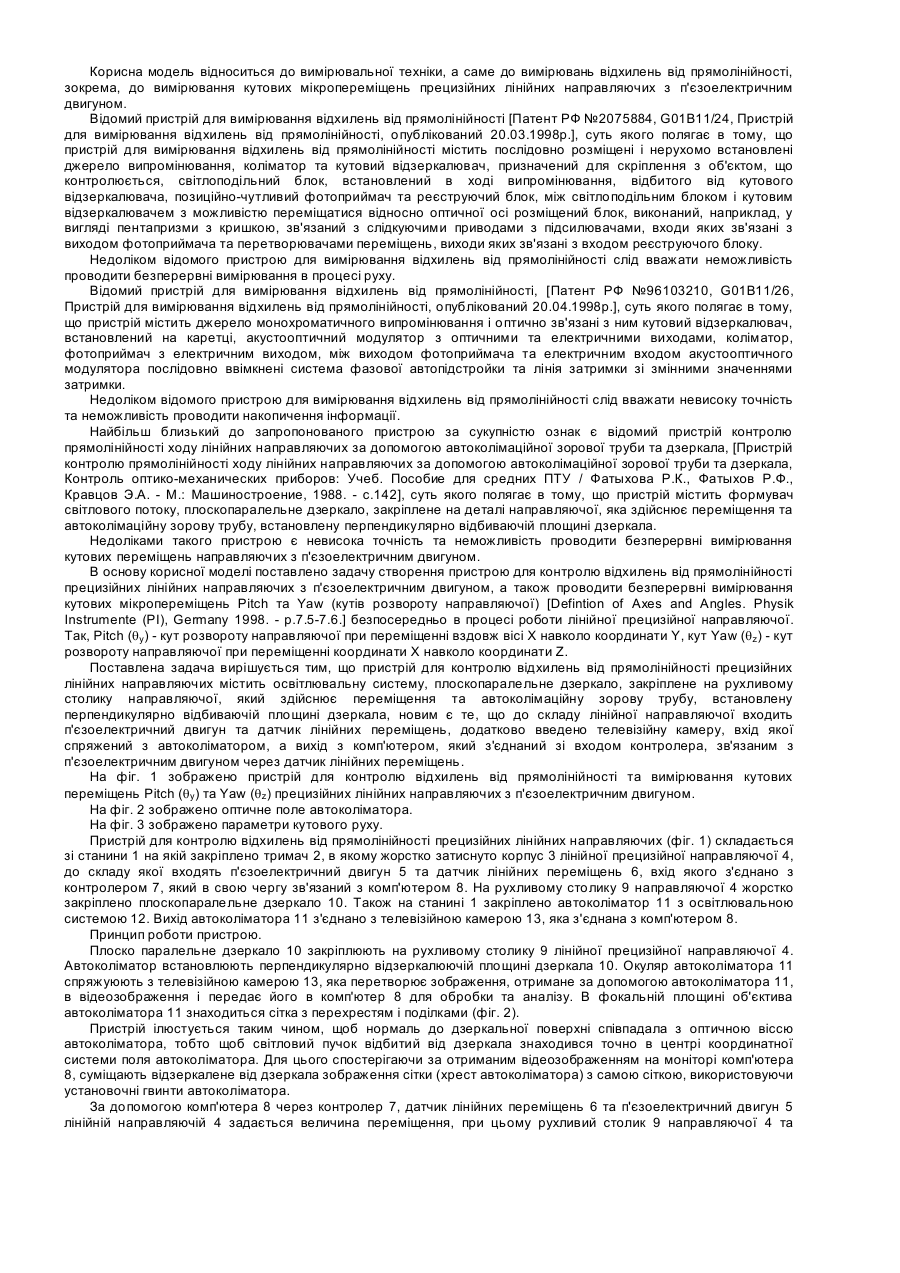
Корисна модель відноситься до вимірювальної техніки, а саме до вимірювань відхилень від прямолінійності, зокрема, до вимірювання кутових мікропереміщень прецизійних лінійних направляючих з п'єзоелектричним двигуном. Відомий пристрій для вимірювання відхилень від прямолінійності [Патент РФ №2075884, G01B11/24, Пристрій для вимірювання відхилень від прямолінійності, опублікований 20.03.1998р.], суть якого полягає в тому, що пристрій для вимірювання відхилень від прямолінійності містить послідовно розміщені і нерухомо встановлені джерело випромінювання, коліматор та кутовий відзеркалювач, призначений для скріплення з об'єктом, що контролюється, світлоподільний блок, встановлений в ході випромінювання, відбитого від кутового відзеркалювача, позиційно-чутливий фотоприймач та реєструючий блок, між світлоподільним блоком і кутовим відзеркалювачем з можливістю переміщатися відносно оптичної осі розміщений блок, виконаний, наприклад, у вигляді пентапризми з кришкою, зв'язаний з слідкуючими приводами з підсилювачами, входи яких зв'язані з виходом фотоприймача та перетворювачами переміщень, виходи яких зв'язані з входом реєструючого блоку. Недоліком відомого пристрою для вимірювання відхилень від прямолінійності слід вважати неможливість проводити безперервні вимірювання в процесі руху. Відомий пристрій для вимірювання відхилень від прямолінійності, [Патент РФ №96103210, G01B11/26, Пристрій для вимірювання відхилень від прямолінійності, опублікований 20.04.1998р.], суть якого полягає в тому, що пристрій містить джерело монохроматичного випромінювання і оптично зв'язані з ним кутовий відзеркалювач, встановлений на каретці, акустооптичний модулятор з оптичними та електричними виходами, коліматор, фотоприймач з електричним виходом, між виходом фотоприймача та електричним входом акустооптичного модулятора послідовно ввімкнені система фазової автопідстройки та лінія затримки зі змінними значеннями затримки. Недоліком відомого пристрою для вимірювання відхилень від прямолінійності слід вважати невисоку точність та неможливість проводити накопичення інформації. Найбільш близький до запропонованого пристрою за сукупністю ознак є відомий пристрій контролю прямолінійності ходу лінійних направляючих за допомогою автоколімаційної зорової труби та дзеркала, [Пристрій контролю прямолінійності ходу лінійних направляючих за допомогою автоколімаційної зорової труби та дзеркала, Контроль оптико-механических приборов: Учеб. Пособие для средних ПТУ / Фатыхова Р.К., Фатыхов Р.Ф., Кравцов Э.А. - М.: Машиностроение, 1988. - с.142], суть якого полягає в тому, що пристрій містить формувач світлового потоку, плоскопаралельне дзеркало, закріплене на деталі направляючої, яка здійснює переміщення та автоколімаційну зорову трубу, встановлену перпендикулярно відбиваючій площині дзеркала. Недоліками такого пристрою є невисока точність та неможливість проводити безперервні вимірювання кутових переміщень направляючих з п'єзоелектричним двигуном. В основу корисної моделі поставлено задачу створення пристрою для контролю відхилень від прямолінійності прецизійних лінійних направляючих з п'єзоелектричним двигуном, а також проводити безперервні вимірювання кутових мікропереміщень Pitch та Yaw (кутів розвороту направляючої) [Defintion of Axes and Angles. Physik Instrumente (PI), Germany 1998. - p.7.5-7.6.] безпосередньо в процесі роботи лінійної прецизійної направляючої. Так, Pitch (qу) - кут розвороту направляючої при переміщенні вздовж вісі X навколо координати Y, кут Yaw (qz) - кут розвороту направляючої при переміщенні координати X навколо координати Z. Поставлена задача вирішується тим, що пристрій для контролю відхилень від прямолінійності прецизійних лінійних направляючих містить освітлювальну систему, плоскопаралельне дзеркало, закріплене на рухливому столику направляючої, який здійснює переміщення та автоколімаційну зорову трубу, встановлену перпендикулярно відбиваючій площині дзеркала, новим є те, що до складу лінійної направляючої входить п'єзоелектричний двигун та датчик лінійних переміщень, додатково введено телевізійну камеру, вхід якої спряжений з автоколіматором, а вихід з комп'ютером, який з'єднаний зі входом контролера, зв'язаним з п'єзоелектричним двигуном через датчик лінійних переміщень. На фіг. 1 зображено пристрій для контролю відхилень від прямолінійності та вимірювання кутових переміщень Pitch (qу) та Yaw (qz) прецизійних лінійних направляючих з п'єзоелектричним двигуном. На фіг. 2 зображено оптичне поле автоколіматора. На фіг. 3 зображено параметри кутового руху. Пристрій для контролю відхилень від прямолінійності прецизійних лінійних направляючих (фіг. 1) складається зі станини 1 на якій закріплено тримач 2, в якому жорстко затиснуто корпус 3 лінійної прецизійної направляючої 4, до складу якої входять п'єзоелектричний двигун 5 та датчик лінійних переміщень 6, вхід якого з'єднано з контролером 7, який в свою чергу зв'язаний з комп'ютером 8. На рухливому столику 9 направляючої 4 жорстко закріплено плоскопаралельне дзеркало 10. Також на станині 1 закріплено автоколіматор 11 з освітлювальною системою 12. Вихід автоколіматора 11 з'єднано з телевізійною камерою 13, яка з'єднана з комп'ютером 8. Принцип роботи пристрою. Плоско паралельне дзеркало 10 закріплюють на рухливому столику 9 лінійної прецизійної направляючої 4. Автоколіматор встановлюють перпендикулярно відзеркалюючій площині дзеркала 10. Окуляр автоколіматора 11 спряжуюють з телевізійною камерою 13, яка перетворює зображення, отримане за допомогою автоколіматора 11, в відеозображення і передає його в комп'ютер 8 для обробки та аналізу. В фокальній площині об'єктива автоколіматора 11 знаходиться сітка з перехрестям і поділками (фіг. 2). Пристрій ілюстується таким чином, щоб нормаль до дзеркальної поверхні співпадала з оптичною віссю автоколіматора, тобто щоб світловий пучок відбитий від дзеркала знаходився точно в центрі координатної системи поля автоколіматора. Для цього спостерігаючи за отриманим відеозображенням на моніторі комп'ютера 8, суміщають відзеркалене від дзеркала зображення сітки (хрест автоколіматора) з самою сіткою, використовуючи установочні гвинти автоколіматора. За допомогою комп'ютера 8 через контролер 7, датчик лінійних переміщень 6 та п'єзоелектричний двигун 5 лінійній направляючій 4 задається величина переміщення, при цьому рухливий столик 9 направляючої 4 та дзеркало 10, яке жорстко закріплене на рухливому столику 9, здійснюють лінійні переміщення відносно нерухомої станини 1. Сутність пристрою полягає в наступному. Вимірювання кутів відхилення виконується за допомогою телевізійної камери, яка спряжена з автоколіматором. Автоколіматор оптично зв'язаний з плоскопаралельним дзеркалом, яке закріплене на рухливому столику лінійної прецизійної направляючої, контроль прямолінійності ходу якої контролюється. При переміщенні рухливого столика лінійної направляючої вздовж вісі руху X під дією п'єзоелектричного двигуна, дзеркало переміщується перпендикулярно нормалі автоколіматора. При цьому в полі автоколіматора, яке відображається на моніторі комп'ютера, спостерігається відхилення автоколімаційного зображення (хреста автоколіматора) від перехрестя сітки автоколіматора (фіг. 2). Ці відхилення зумовлені наявністю в системі похибок внаслідок кутових відхилень Pitch (qу) та Yaw (qz). Так Pitch (qy) відповідає за відхилення по осі Y, a Yaw (qz) - по осі X (фіг. 3). Таким чином, контролюють точність лінійних прецизійних направляючих з п'єзоелектричним двигуном на прямолінійність ходу та проводять вимірювання відхилень від прямолінійності Pitch (qу) та Yaw (qz) безпосередньо в процесі руху направляючої разом з постійним накопиченням відеоінформації. При проведенні контролю відхилень від прямолінійності ходу лінійної прецизійної направляючої з п'єзоелектричним двигуном вимірюють величини кутових відхилень Pitch (qу) та Yaw (qz) та отримують залежності даних відхилень від величини лінійного переміщення рухливого столику вздовж вісі переміщення. В процесі проведенні вимірювань задають циклічний рух направляючій в прямому та зворотному напрямках ходу на всьому робочому діапазоні направляючої або на певному відрізку, який необхідно проконтролювати, реєструють величини відхилень автоколімаційного зображення (хрест автоколіматора) від перехрестя сітки за допомогою шкали, яка нанесена на сітку автоколіматора. Таким чином, пристрій, що заявляється, дозволяє контролювати відхилення від прямолінійності та проводити вимірювання кутових мікропереміщень прецизійних лінійних направляючих з п'єзоелектричним двигуном безпосередньо в процесі роботи направляючої, що можна вважати достатнім для практичного використання. Джерела інформації: Аналоги: - Патент РФ №2075884, G01B11/24, Пристрій для вимірювання відхилень від прямолінійності, опублікований 20.03.1998р. - Патент РФ №96103210, G01B11/26, Пристрій для вимірювання відхилень від прямолінійності, опублікований 20.04.1998р. Найближчі аналоги: - Пристрій контролю прямолінійності ходу лінійних направляючих за допомогою автоколімаційної зорової труби та дзеркала, Контроль оптико-механических приборов: Учеб. Пособие для средних ПТУ / Фатыхова Р.К., Фатыхов Р.Ф., Кравцов Э.А. - М.: Машиностроение, 1988. - с. 142. - Defintion of Axes and Angles. Physik Instrumente (PI), Germany 1998. - p.7.5-7.6.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of deviations from straightness of precision linear guides
Автори англійськоюBelova Aliona Viktorivna, Petrenko Serhii Fedorovych, Antoniuk Viktor Stepanovych
Назва патенту російськоюУстройство для контроля отклонений от прямолинейности прецизионных линейных направляющих
Автори російськоюБелова Алена Викторовна, Петренко Сергей Федорович, Антонюк Виктор Степанович
МПК / Мітки
МПК: G01B 11/00
Мітки: прецизійних, прямолінійності, лінійних, пристрій, відхилень, напрямних, контролю
Код посилання
<a href="https://ua.patents.su/3-32249-pristrijj-dlya-kontrolyu-vidkhilen-vid-pryamolinijjnosti-precizijjnikh-linijjnikh-napryamnikh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю відхилень від прямолінійності прецизійних лінійних напрямних</a>
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу
Номер патенту: 31199
Опубліковано: 25.03.2008
Автори: Бєлова Альона Вікторівна, Петренко Сергій Федорович, Антонюк Віктор Степанович
МПК: G01B 11/00
Мітки: ходу, напрямних, спосіб, лінійних, прямолінійність, прецизійних, контролю
Формула / Реферат:
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу, що включає формування світлового потоку, отримання зображення перехрестя автоколімаційної зорової труби, приймання віддзеркаленого зображення перехрестя, суміщення його з сіткою, а також здійснення переміщень об'єкта вздовж осі руху, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується,...
Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних
Номер патенту: 32248
Опубліковано: 12.05.2008
Автори: Бєлова Альона Вікторівна, Антонюк Віктор Степанович, Петренко Сергій Федорович
МПК: G01B 11/00
Мітки: напрямних, мікропереміщень, пристрій, лінійних, прецизійних, контролю
Формула / Реферат:
Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних, що містить формувач світлового потоку, приймач, комп'ютер, оптичну систему, вхід якої зв'язаний з виходом формувача світлового потоку, а вихід з приймачем, який відрізняється тим, що оптична система виконана у вигляді мікроскопа, який спряжено з приймачем, що являє собою телевізійну камеру, вихід якої з'єднаний з комп'ютером, який з'єднаний із входом додатково...
Спосіб контролю лінійних мікропереміщень прецизійних направляючих
Номер патенту: 31536
Опубліковано: 10.04.2008
Автори: Бєлова Альона Вікторівна, Антонюк Віктор Степанович, Петренко Сергій Федорович
МПК: G01B 11/00
Мітки: прецизійних, лінійних, мікропереміщень, спосіб, направляючих, контролю
Формула / Реферат:
1. Спосіб контролю лінійних мікропереміщень прецизійних направляючих, що включає приймання інформації від об'єкта, що переміщується, та визначення величини лінійних переміщень на підставі її аналізу, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується, візуальну інформацію про фактичне лінійне переміщення об'єкта перетворюють у відеозображення, попередньо...
Пристрій для контролю відхилень від прямолінійності
Номер патенту: 6565
Опубліковано: 29.12.1994
Автори: Ісаков Станіслав Васильович, Колісник Євгеній Сергійович, Кузенко Вячеслав Григорович, Лугін Володимир Павлович, Бражник Євгеній Георгійович
МПК: G01B 5/28
Мітки: контролю, пристрій, відхилень, прямолінійності
Формула / Реферат:
(57) Устройство для контроля отклонений от прямолинейности, содержащее корпус, установленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса расположен в плоскости, равноудаленной от базовых опор, отличающееся тем, что оно снабжено штангой, соединенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения штанги с датчиком пройденного пути, механизмам вращения...
Пристрій для вимірювання відхилень форми та розташування формоутворюючих поверхонь антенних дзеркал
Номер патенту: 31486
Опубліковано: 15.12.2000
Автори: Петруша Володимир Олександрович, Пастернак Богдан Миронович, Маркович Юрій Іванович, Кущак Ігор Володимирович, Сиротюк Віктор Володимирович
МПК: G01B 11/00, H01Q 15/14, G01B 11/24
Мітки: поверхонь, розташування, дзеркал, форми, пристрій, вимірювання, антенних, відхилень, формоутворюючих
Текст:
...вздовж направляючої. На фіг.І показаній загальний вигляд пристрою для вимірювання форми та розташування формоутворетчих поверхонь; на фіг.2 - виносний елемент А на фіг.І в розрізі; на оІг.З - розрахункова схема для визначення відхилення профілю об'єкту вимірювання від теоретичного. Пристрій для вимірювання відхилень форми та розташування формоутворюючих поверхонь антенних дзеркал складається з джерела вузьконапразленого оптичного...
Попередній патент: Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних
Наступний патент: Пристрій для отримання періодичного обертального руху веденої ланки
Випадковий патент: Спосіб отримання майонезу