Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу
Номер патенту: 31199
Опубліковано: 25.03.2008
Автори: Петренко Сергій Федорович, Бєлова Альона Вікторівна, Антонюк Віктор Степанович
Формула / Реферат
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу, що включає формування світлового потоку, отримання зображення перехрестя автоколімаційної зорової труби, приймання віддзеркаленого зображення перехрестя, суміщення його з сіткою, а також здійснення переміщень об'єкта вздовж осі руху, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується, віддзеркалене та суміщене з сіткою зображення перехрестя перетворюють у відеозображення, проводять його обробку і аналіз, вимірюють зміщення автоколімаційного зображення від перехрестя і по цьому зміщенню судять про величину кутових відхилень об'єкта Pitch - кута розвороту напрямної при переміщенні вздовж осі X навколо координати Y, та Yaw - кута розвороту напрямної при переміщенні координати X навколо координати Z.
Текст
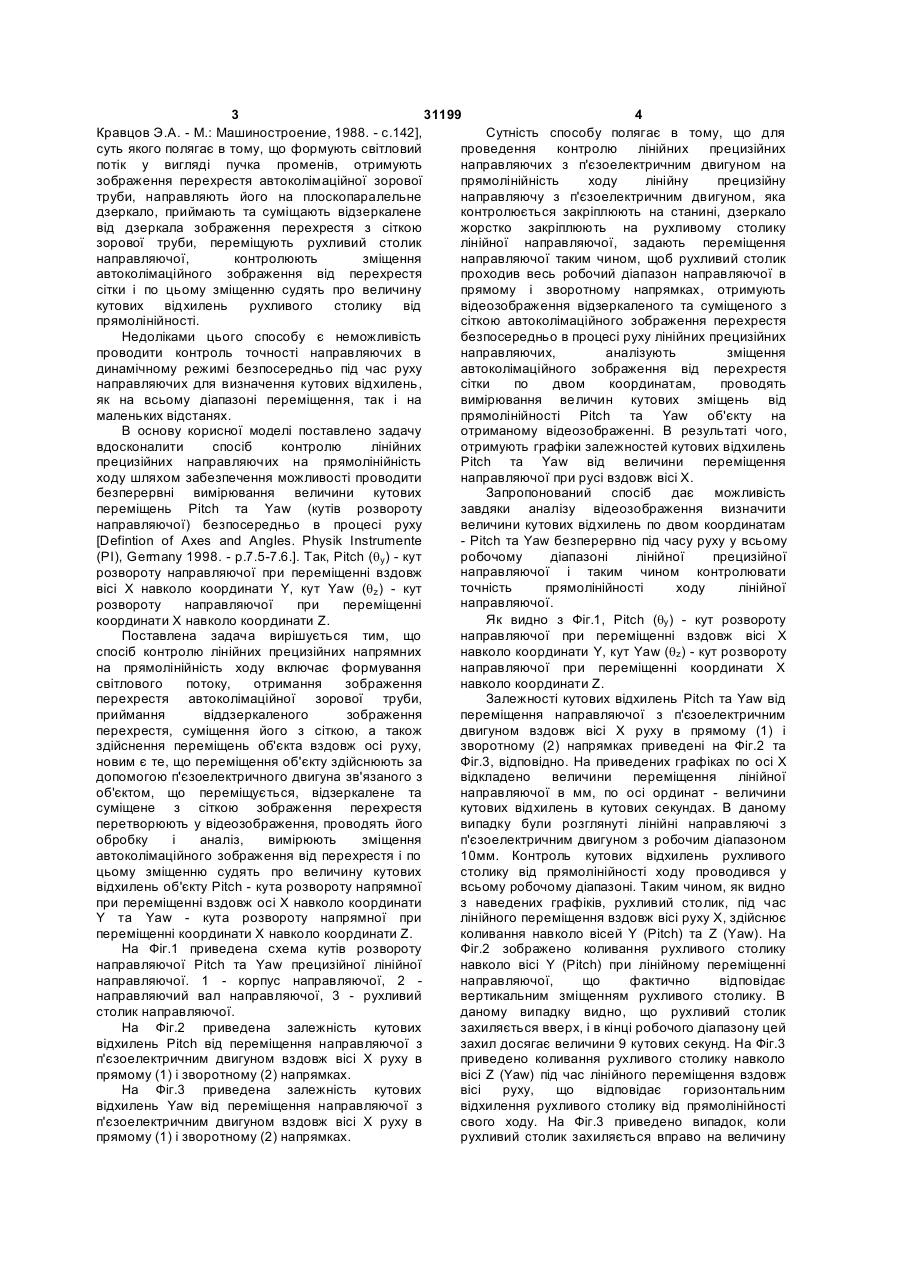
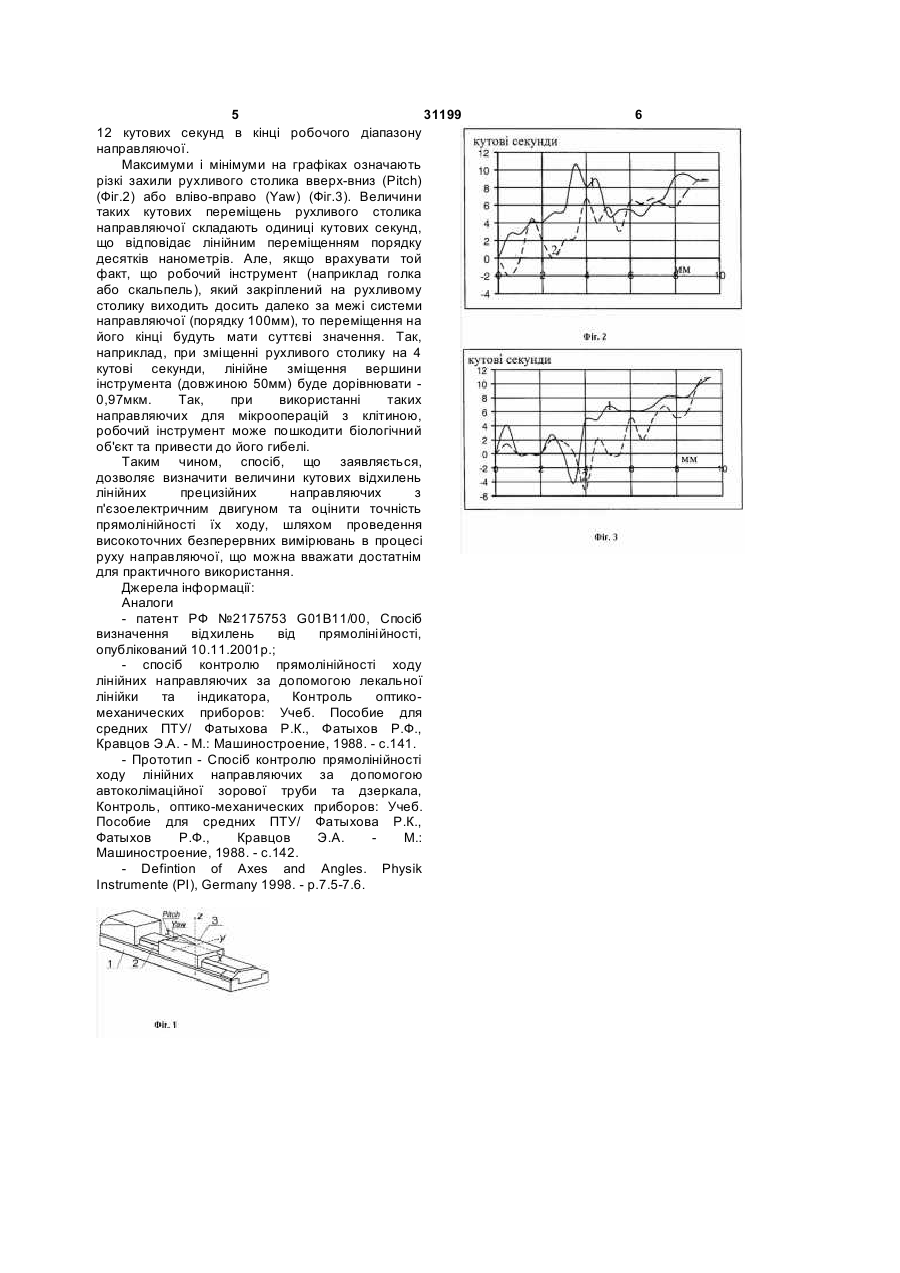
Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу, що включає формування світлового потоку, отримання зображення перехрестя автоколімаційної зорової труби, приймання віддзеркаленого зображення 3 31199 4 Сутність способу полягає в тому, що для Кравцов Э.А. - М.: Машиностроение, 1988. - с.142], проведення контролю лінійних прецизійних суть якого полягає в тому, що формують світловий направляючих з п'єзоелектричним двигуном на потік у вигляді пучка променів, отримують прямолінійність ходу лінійну прецизійну зображення перехрестя автоколімаційної зорової направляючу з п'єзоелектричним двигуном, яка труби, направляють його на плоскопаралельне контролюється закріплюють на станині, дзеркало дзеркало, приймають та суміщають відзеркалене жорстко закріплюють на рухливому столику від дзеркала зображення перехрестя з сіткою лінійної направляючої, задають переміщення зорової труби, переміщують рухливий столик направляючої таким чином, щоб рухливий столик направляючої, контролюють зміщення проходив весь робочий діапазон направляючої в автоколімаційного зображення від перехрестя прямому і зворотному напрямках, отримують сітки і по цьому зміщенню судять про величину відеозображення відзеркаленого та суміщеного з кутових відхилень рухливого столику від сіткою автоколімаційного зображення перехрестя прямолінійності. безпосередньо в процесі руху лінійних прецизійних Недоліками цього способу є неможливість направляючих, аналізують зміщення проводити контроль точності направляючих в автоколімаційного зображення від перехрестя динамічному режимі безпосередньо під час руху сітки по двом координатам, проводять направляючих для визначення кутових відхилень, вимірювання величин кутових зміщень від як на всьому діапазоні переміщення, так і на прямолінійності Pitch та Yaw об'єкту на маленьких відстанях. отриманому відеозображенні. В результаті чого, В основу корисної моделі поставлено задачу отримують графіки залежностей кутових відхилень вдосконалити спосіб контролю лінійних Pitch та Yaw від величини переміщення прецизійних направляючих на прямолінійність направляючої при русі вздовж вісі X. ходу шляхом забезпечення можливості проводити Запропонований спосіб дає можливість безперервні вимірювання величини кутових завдяки аналізу відеозображення визначити переміщень Pitch та Yaw (кутів розвороту величини кутових відхилень по двом координатам направляючої) безпосередньо в процесі руху - Pitch та Yaw безперервно під часу руху у всьому [Defintion of Axes and Angles. Physik Instrumente робочому діапазоні лінійної прецизійної (PI), Germany 1998. - p.7.5-7.6.]. Так, Pitch (qy) - кут направляючої і таким чином контролювати розвороту направляючої при переміщенні вздовж точність прямолінійності ходу лінійної вісі X навколо координати Y, кут Yaw (qz) - кут направляючої. розвороту направляючої при переміщенні Як видно з Фіг.1, Pitch (qу) - кут розвороту координати X навколо координати Z. направляючої при переміщенні вздовж вісі X Поставлена задача вирішується тим, що навколо координати Y, кут Yaw (qz) - кут розвороту спосіб контролю лінійних прецизійних напрямних направляючої при переміщенні координати X на прямолінійність ходу включає формування навколо координати Z. світлового потоку, отримання зображення Залежності кутових відхилень Pitch та Yaw від перехрестя автоколімаційної зорової труби, переміщення направляючої з п'єзоелектричним приймання віддзеркаленого зображення двигуном вздовж вісі X руху в прямому (1) і перехрестя, суміщення його з сіткою, а також зворотному (2) напрямках приведені на Фіг.2 та здійснення переміщень об'єкта вздовж осі руху, Фіг.3, відповідно. На приведених графіках по осі X новим є те, що переміщення об'єкту здійснюють за відкладено величини переміщення лінійної допомогою п'єзоелектричного двигуна зв'язаного з направляючої в мм, по осі ординат - величини об'єктом, що переміщується, відзеркалене та кутових відхилень в кутових секундах. В даному суміщене з сіткою зображення перехрестя випадку були розглянуті лінійні направляючі з перетворюють у відеозображення, проводять його п'єзоелектричним двигуном з робочим діапазоном обробку і аналіз, вимірюють зміщення 10мм. Контроль кутових відхилень рухливого автоколімаційного зображення від перехрестя і по столику від прямолінійності ходу проводився у цьому зміщенню судять про величину кутових всьому робочому діапазоні. Таким чином, як видно відхилень об'єкту Pitch - кута розвороту напрямної з наведених графіків, рухливий столик, під час при переміщенні вздовж осіX навколо координати лінійного переміщення вздовж вісі руху X, здійснює Y та Yaw - кута розвороту напрямної при коливання навколо вісей Y (Pitch) та Z (Yaw). На переміщенні координати X навколо координати Z. Фіг.2 зображено коливання рухливого столику На Фіг.1 приведена схема кутів розвороту навколо вісі Y (Pitch) при лінійному переміщенні направляючої Pitch та Yaw прецизійної лінійної направляючої, що фактично відповідає направляючої. 1 - корпус направляючої, 2 вертикальним зміщенням рухливого столику. В направляючий вал направляючої, 3 - рухливий даному випадку видно, що рухливий столик столик направляючої. захиляється вверх, і в кінці робочого діапазону цей На Фіг.2 приведена залежність кутових захил досягає величини 9 кутових секунд. На Фіг.3 відхилень Pitch від переміщення направляючої з приведено коливання рухливого столику навколо п'єзоелектричним двигуном вздовж вісі X руху в вісі Z (Yaw) під час лінійного переміщення вздовж прямому (1) і зворотному (2) напрямках. вісі руху, що відповідає горизонтальним На Фіг.3 приведена залежність кутових відхилення рухливого столику від прямолінійності відхилень Yaw від переміщення направляючої з свого ходу. На Фіг.3 приведено випадок, коли п'єзоелектричним двигуном вздовж вісі X руху в рухливий столик захиляється вправо на величину прямому (1) і зворотному (2) напрямках. 5 31199 12 кутових секунд в кінці робочого діапазону направляючої. Максимуми і мінімуми на графіках означають різкі захили рухливого столика вверх-вниз (Pitch) (Фіг.2) або вліво-вправо (Yaw) (Фіг.3). Величини таких кутових переміщень рухливого столика направляючої складають одиниці кутових секунд, що відповідає лінійним переміщенням порядку десятків нанометрів. Але, якщо врахувати той факт, що робочий інструмент (наприклад голка або скальпель), який закріплений на рухливому столику виходить досить далеко за межі системи направляючої (порядку 100мм), то переміщення на його кінці будуть мати суттєві значення. Так, наприклад, при зміщенні рухливого столику на 4 кутові секунди, лінійне зміщення вершини інструмента (довжиною 50мм) буде дорівнювати 0,97мкм. Так, при використанні таких направляючих для мікрооперацій з клітиною, робочий інструмент може пошкодити біологічний об'єкт та привести до його гибелі. Таким чином, спосіб, що заявляється, дозволяє визначити величини кутових відхилень лінійних прецизійних направляючих з п'єзоелектричним двигуном та оцінити точність прямолінійності їх ходу, шляхом проведення високоточних безперервних вимірювань в процесі руху направляючої, що можна вважати достатнім для практичного використання. Джерела інформації: Аналоги - патент РФ №2175753 G01B11/00, Спосіб визначення відхилень від прямолінійності, опублікований 10.11.2001р.; - cпосіб контролю прямолінійності ходу лінійних направляючих за допомогою лекальної лінійки та індикатора, Контроль оптикомеханических приборов: Учеб. Пособие для средних ПТУ/ Фатыхова Р.К., Фатыхов Р.Ф., Кравцов Э.А. - М.: Машиностроение, 1988. - с.141. - Прототип - Спосіб контролю прямолінійності ходу лінійних направляючих за допомогою автоколімаційної зорової труби та дзеркала, Контроль, оптико-механических приборов: Учеб. Пособие для средних ПТУ/ Фатыхова Р.К., Фатыхов Р.Ф., Кравцов Э.А. М.: Машиностроение, 1988. - с.142. - Defintion of Axes and Angles. Physik Instrumente (PI), Germany 1998. - p.7.5-7.6. 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of linear precision guides on straightness of motion
Автори англійськоюBelova Aliona Viktorivna, Petrenko Serhii Fedorovych, Antoniuk Viktor Stepanovych
Назва патенту російськоюСпособ контроля линейных прецизионных направляющих на прямолинейность хода
Автори російськоюБелова Алена Викторовна, Петренко Сергей Федорович, Антонюк Виктор Степанович
МПК / Мітки
МПК: G01B 11/00
Мітки: спосіб, ходу, лінійних, прямолінійність, прецизійних, контролю, напрямних
Код посилання
<a href="https://ua.patents.su/3-31199-sposib-kontrolyu-linijjnikh-precizijjnikh-napryamnikh-na-pryamolinijjnist-khodu.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю лінійних прецизійних напрямних на прямолінійність ходу</a>
Спосіб контролю осей колісних пар на ходу потяга

Номер патенту: 19306
Опубліковано: 15.12.2006
Автори: Войтенко Галина Олегівна, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: колісних, пар, осей, ходу, контролю, спосіб, потяга
Формула / Реферат:
Спосіб контролю осей колісних пар на ходу потяга, відповідно до якого в осі колісної пари збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають віддзеркалені від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням та виявляють місцезнаходження дефекту за часом запізнювання віддзеркалених хвиль, який відрізняється тим, що поверхневим...
Пристрій програмного керування і контролю ходу шахтних підйомних машин
Номер патенту: 5758
Опубліковано: 29.12.1994
Автори: Марищенко Олександр Іванович, Матвієнко Микола Павлович
Мітки: підйомних, контролю, пристрій, програмного, ходу, керування, шахтних, машин
Формула / Реферат:
Устройство программного управлений и контроля хода шахтных подъемных машин, содержащее датчик путевых импульсов, первый выход которого соединен со счетным, а второй выход - с управляющим входом реверсивного счетчика и информационными входами первого и второго D-триггеров, синхронизирующие входы которых через дешифратор и постоянный запоминающий узел подключены к выходам реверсивного счетчика, при этом выходы первого и второго D-триггеров...
Пристрій для ремонту напрямних станини
Номер патенту: 12314
Опубліковано: 16.01.2006
Автор: Новіков Ростислав Володимирович
МПК: B23P 6/00
Мітки: пристрій, напрямних, ремонту, станини
Формула / Реферат:
1. Пристрій для ремонту напрямних станини, що містить інструментальну головку, механізми її повороту і переміщення відносно напрямних, засіб контролю її положення, який відрізняється тим, що інструментальна головка встановлена на рухомому відносно ремонтовних напрямних елементі, зв'язаному з ремонтовними напрямними і приводами переміщення ремонтовного станка.2. Пристрій для ремонту напрямних станини за п. 1, який відрізняється тим, що...
Спосіб радикального висічення епітеліального куприкового ходу
Номер патенту: 16865
Опубліковано: 15.08.2006
Автори: Дубовий Владислав Андрійович, Луцик Андрій Петрович, Яремчук Ігнат Олександрович, Лишавський Олександр Віталійович
МПК: A61B 17/22
Мітки: куприкового, ходу, висічення, радикального, спосіб, епітеліального
Формула / Реферат:
Спосіб радикального висічення епітеліального куприкового ходу, який включає контрастування епітеліального куприкового ходу, висічення тканини в межах незміненої жирової клітковини до окістя крижової кістки з ретельним гемостазом та встановлення дренажної трубки, який відрізняється тим, що розтин виконують ромбоподібно, а потім формують два шкірно-підшкірних шматки, які переміщують один відносно одного та пошарово зшивають.
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних
Номер патенту: 63306
Опубліковано: 15.01.2004
Автори: Бабін Олег Фавієвич, Ковальов Віктор Дмитрович, Владимиров Анатолій Юрієвич, Мельник Максим Сергійович
МПК: G05D 3/12
Мітки: металорізального, верстата, привід, компенсацією, похибок, слідкуючий, подачі, напрямних
Формула / Реферат:
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних, що містить рухомий вузол, розташований на напрямних поперечного переміщення, які розташовані на напрямних повздовжнього переміщення, електродвигун поперечної подачі , зв'язаний механічно з рухомим вузлом, імпульсний дискретний датчик, електронний цифровий реверсивний лічильник, вхід якого зв'язаний з імпульсним дискретним датчиком, задавальний пристрій,...
Попередній патент: Спосіб комбінованої лазеро-хіміко-термічної обробки сталевих виробів
Наступний патент: Контактний тепломасообмінник
Випадковий патент: Радіоелектронний блок