Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь
Формула / Реферат
Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, що містить передню та задню піврами, яка відрізняється тим, що у вилках керованих коліс, котрі шарнірно з'єднані з передньою піврамою, розміщені пружні елементи, а задня піврама за допомогою пружних елементів, що розміщені під кутом до горизонтальної поверхні, та шарнірів з'єднана з передньою піврамою, з можливістю утримання робочої платформи паралельно поверхні руху.
Текст
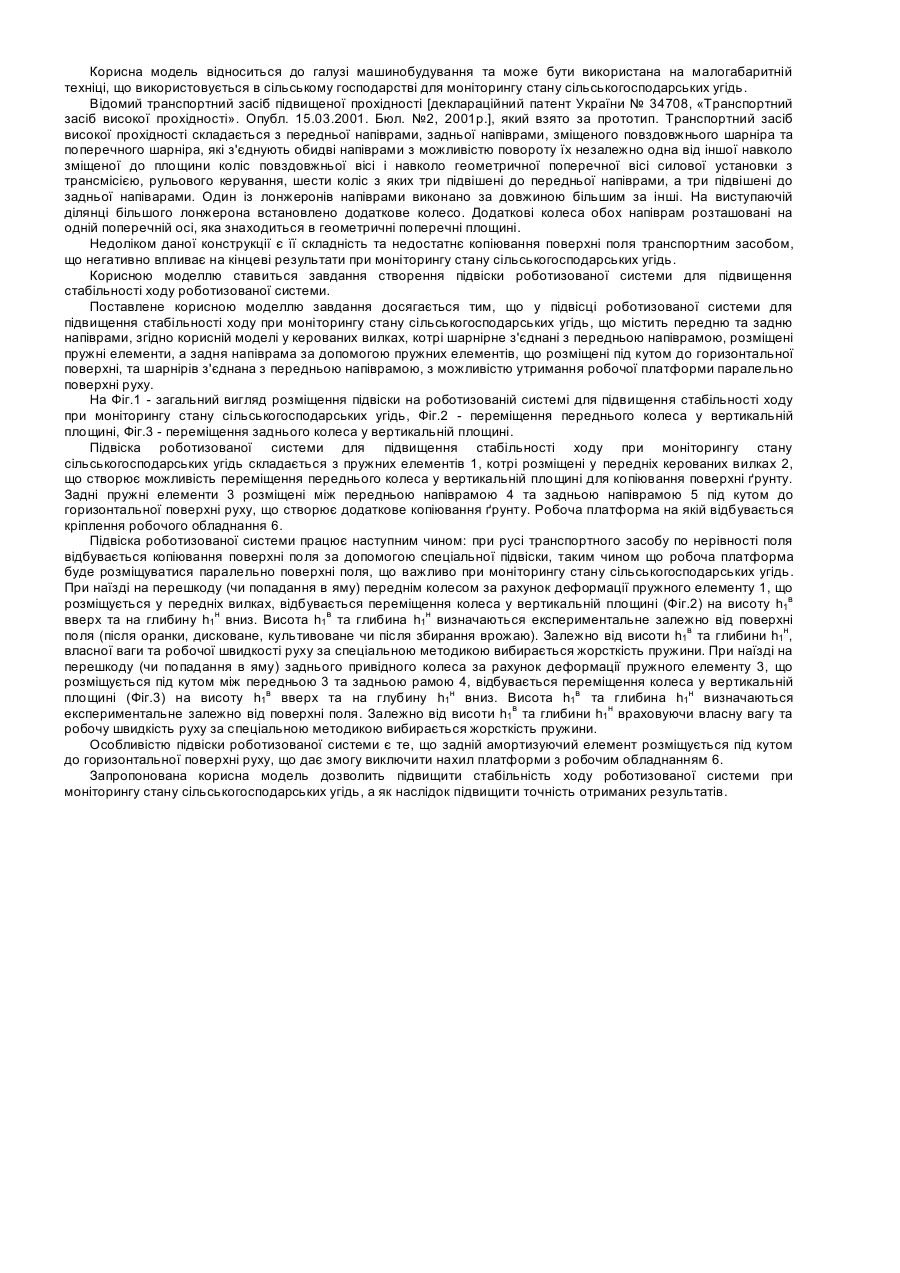
Корисна модель відноситься до галузі машинобудування та може бути використана на малогабаритній техніці, що використовується в сільському господарстві для моніторингу стану сільськогосподарських угідь. Відомий транспортний засіб підвищеної прохідності [деклараційний патент України № 34708, «Транспортний засіб високої прохідності». Опубл. 15.03.2001. Бюл. №2, 2001р.], який взято за прототип. Транспортний засіб високої прохідності складається з передньої напіврами, задньої напіврами, зміщеного повздовжнього шарніра та поперечного шарніра, які з'єднують обидві напіврами з можливістю повороту їх незалежно одна від іншої навколо зміщеної до площини коліс повздовжньої вісі і навколо геометричної поперечної вісі силової установки з трансмісією, рульового керування, шести коліс з яких три підвішені до передньої напіврами, а три підвішені до задньої напіварами. Один із лонжеронів напіврами виконано за довжиною більшим за інші. На виступаючій ділянці більшого лонжерона встановлено додаткове колесо. Додаткові колеса обох напіврам розташовані на одній поперечній осі, яка знаходиться в геометричні поперечні площині. Недоліком даної конструкції є її складність та недостатнє копіювання поверхні поля транспортним засобом, що негативно впливає на кінцеві результати при моніторингу стану сільськогосподарських угідь. Корисною моделлю ставиться завдання створення підвіски роботизованої системи для підвищення стабільності ходу роботизованої системи. Поставлене корисною моделлю завдання досягається тим, що у підвісці роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, що містить передню та задню напіврами, згідно корисній моделі у керованих вилках, котрі шарнірне з'єднані з передньою напіврамою, розміщені пружні елементи, а задня напіврама за допомогою пружних елементів, що розміщені під кутом до горизонтальної поверхні, та шарнірів з'єднана з передньою напіврамою, з можливістю утримання робочої платформи паралельно поверхні руху. На Фіг.1 - загальний вигляд розміщення підвіски на роботизованій системі для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, Фіг.2 - переміщення переднього колеса у вертикальній площині, Фіг.3 - переміщення заднього колеса у вертикальній площині. Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь складається з пружних елементів 1, котрі розміщені у передніх керованих вилках 2, що створює можливість переміщення переднього колеса у вертикальній площині для копіювання поверхні ґрунту. Задні пружні елементи 3 розміщені між передньою напіврамою 4 та задньою напіврамою 5 під кутом до горизонтальної поверхні руху, що створює додаткове копіювання ґрунту. Робоча платформа на якій відбувається кріплення робочого обладнання 6. Підвіска роботизованої системи працює наступним чином: при русі транспортного засобу по нерівності поля відбувається копіювання поверхні поля за допомогою спеціальної підвіски, таким чином що робоча платформа буде розміщуватися паралельно поверхні поля, що важливо при моніторингу стану сільськогосподарських угідь. При наїзді на перешкоду (чи попадання в яму) переднім колесом за рахунок деформації пружного елементу 1, що розміщується у передніх вилках, відбувається переміщення колеса у вертикальній площині (Фіг.2) на висоту h1в вверх та на глибину h1н вниз. Висота h1в та глибина h1н визначаються експериментальне залежно від поверхні поля (після оранки, дисковане, культивоване чи після збирання врожаю). Залежно від висоти h1в та глибини h1н, власної ваги та робочої швидкості руху за спеціальною методикою вибирається жорсткість пружини. При наїзді на перешкоду (чи попадання в яму) заднього привідного колеса за рахунок деформації пружного елементу 3, що розміщується під кутом між передньою 3 та задньою рамою 4, відбувається переміщення колеса у вертикальній площині (Фіг.3) на висоту h1в вверх та на глубину h1н вниз. Висота h1в та глибина h1н визначаються експериментальне залежно від поверхні поля. Залежно від висоти h1в та глибини h1н враховуючи власну вагу та робочу швидкість руху за спеціальною методикою вибирається жорсткість пружини. Особливістю підвіски роботизованої системи є те, що задній амортизуючий елемент розміщується під кутом до горизонтальної поверхні руху, що дає змогу виключити нахил платформи з робочим обладнанням 6. Запропонована корисна модель дозволить підвищити стабільність ходуроботизованої системи при моніторингу стану сільськогосподарських угідь, а як наслідок підвищити точність отриманих результатів.
ДивитисяДодаткова інформація
Назва патенту англійськоюSuspension of robotized system for increasing stability of motion when monitoring the state of agricultural land
Автори англійськоюBrovarets Oleksandr Oleksandrovych
Назва патенту російськоюПодвеска роботизированной системы для повышения стабильности хода при мониторинге состояния сельскохозяйственных угодий
Автори російськоюБроварец Александр Александрович
МПК / Мітки
МПК: B62D 21/12
Мітки: підвищення, системі, ходу, стабільності, угідь, сільськогосподарських, роботизованої, моніторингу, підвіска, стану
Код посилання
<a href="https://ua.patents.su/2-33835-pidviska-robotizovano-sistemi-dlya-pidvishhennya-stabilnosti-khodu-pri-monitoringu-stanu-silskogospodarskikh-ugid.html" target="_blank" rel="follow" title="База патентів України">Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь</a>
Підвіска керованого колеса роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь
Номер патенту: 33834
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: B60G 3/00
Мітки: підвіска, угідь, підвищення, сільськогосподарських, роботизованої, керованого, моніторингу, стану, ходу, колеса, стабільності, системі
Формула / Реферат:
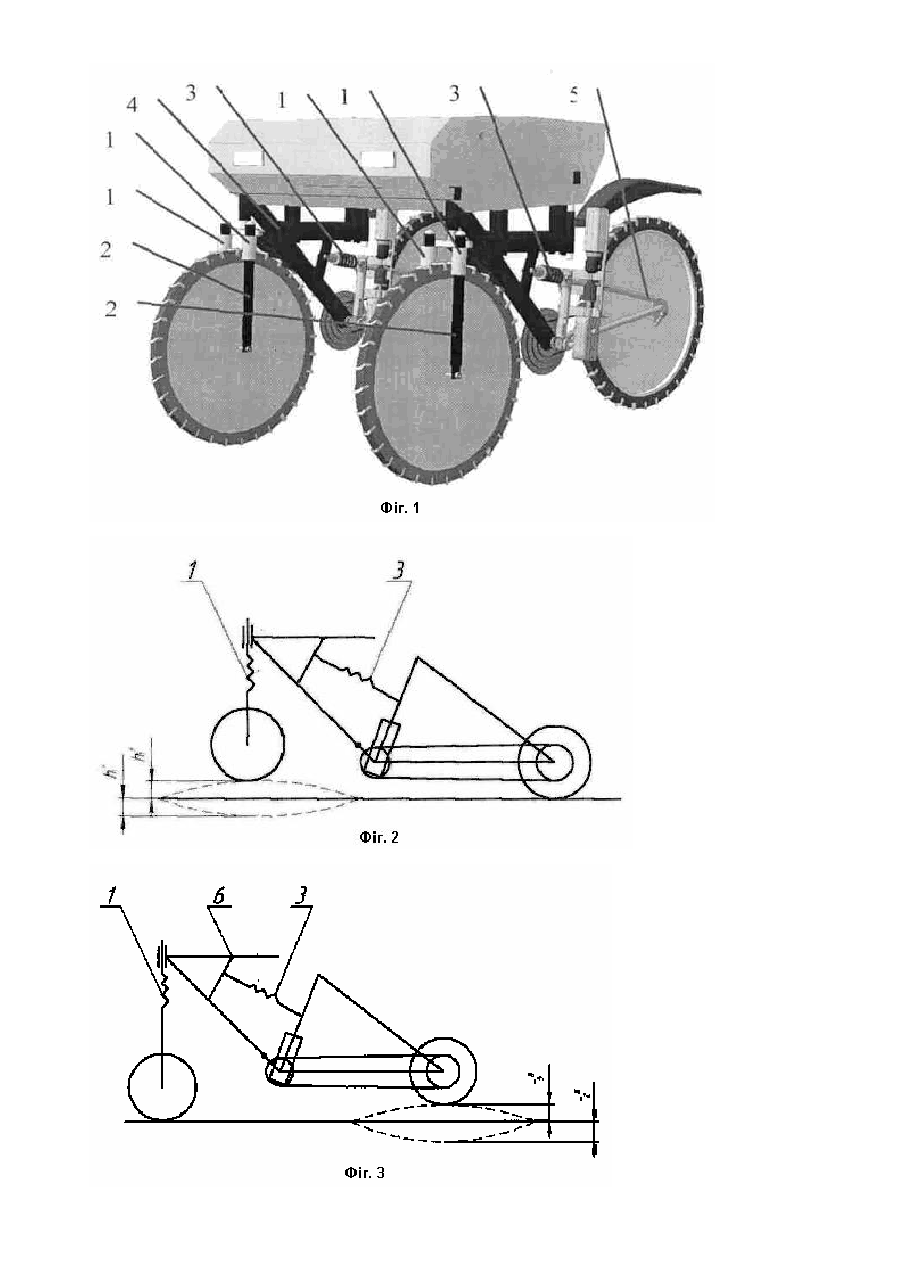
Підвіска керованого колеса роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, що містить кероване колесо з амортизаторами (демпферами) та пружинами, яка відрізняється тим, що у передніх вилках керованих коліс розміщено блоки пружних елементів та демпферів, причому в кожному з блоків пружина та демпфер розміщені паралельно.
Привід роботизованої системи для збору польової місцевизначеної інформації
Номер патенту: 27003
Опубліковано: 10.10.2007
Автор: Броварець Олександр Олександрович
МПК: B60K 1/00
Мітки: роботизованої, інформації, привід, збору, системі, польової, місцевизначеної
Формула / Реферат:
Привід роботизованої системи для збору польової місцевизначеної інформації, що містить раму, ведучий міст, встановлений з можливістю переміщення відносно рами, пружний елемент, ведучі колеса з півосями, з'єднані трансмісією відповідно з ротором та статором, який відрізняється тим, що кожне з ведучих коліс роботизованої системи містить реверсивний електродвигун, який приводить їх в рух через трансмісію, причому трансмісія виконана у вигляді...
Спосіб стимуляції родючості рекультивованих сільськогосподарських угідь
Номер патенту: 57109
Опубліковано: 16.06.2003
Автори: Нех Олександр Володимирович, Шмат Сергій Іванович, Петренко Микола Миколайович, Іванько Іван Павлович, Слободян Степан Миколайович
МПК: A01B 79/02, C09K 17/00
Мітки: угідь, стимуляції, спосіб, рекультивованих, родючості, сільськогосподарських
Формула / Реферат:
Спосіб стимуляції родючості рекультивованих сільськогосподарських угідь за рахунок щілювання підорного шару ґрунту на глибину 40... 45 см з пріоритетним напрямком північ - південь, який відрізняється тим, що на підошву щілин закладають феромагнітні дроти на відстані 12,0... 13,0 м один від одного на період до повного їх розкладання.
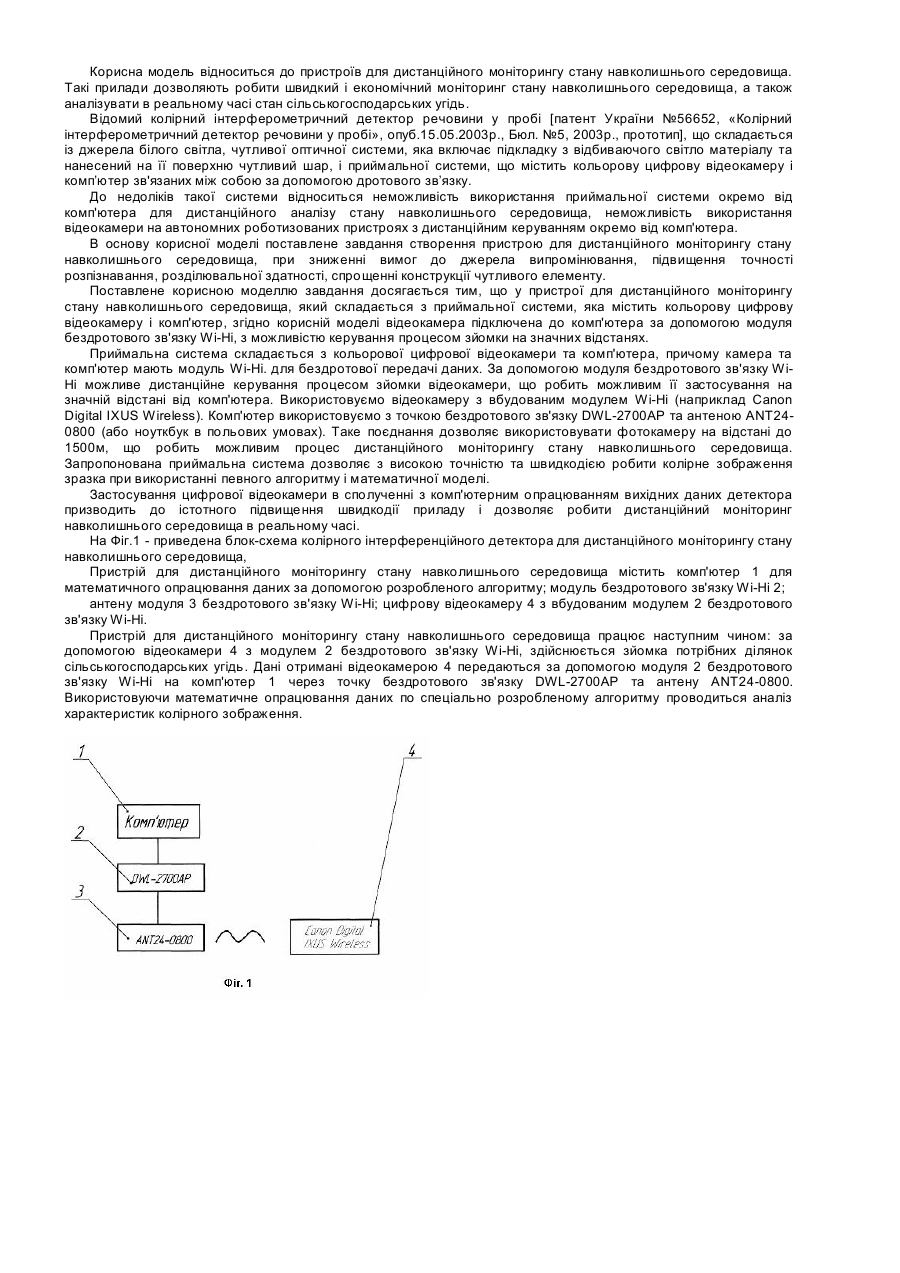
Пристрій для дистанційного моніторингу стану навколишнього середовища
Номер патенту: 33718
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: G01N 21/25
Мітки: дистанційного, стану, навколишнього, моніторингу, пристрій, середовища
Формула / Реферат:
Пристрій для дистанційного моніторингу стану навколишнього середовища, що складається з приймальної системи, яка містить кольорову цифрову відеокамеру і комп'ютер, який відрізняється тим, що відеокамера підключена до комп'ютера за допомогою модуля бездротового зв'язку Wi-Hi, з можливістю керування процесом зйомки на значних відстанях.
Спосіб безперервного моніторингу стану коліс рухомого складу
Номер патенту: 19304
Опубліковано: 15.12.2006
Автори: Осенін Юрій Іванович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: рухомого, моніторингу, стану, безперервного, коліс, складу, спосіб
Формула / Реферат:
Спосіб безперервного моніторингу стану коліс рухомого складу, відповідно до якого в контрольованому виробі збуджують ультразвукові коливання, приймають віддзеркалені від дефектів сигнали, здійснюють цифровий запис амплітуд віддзеркалених сигналів та часу їх надходження, за часом надходження сигналу визначають відстань до дефекту, далі, порівнюючи значення відстані між перетворювачем та дефектом при їх різному взаємному розташуванні,...
Попередній патент: Підвіска керованого колеса роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь
Наступний патент: Дробарка молоткова
Випадковий патент: Спосіб оцінки технічного стану сталевих конструкцій будівель і споруд