Багатокоординатний стіл
Номер патенту: 46324
Опубліковано: 15.05.2002
Автори: Крижанівський Володимир Андрійович, Смирнов Максим Володимирович, Пестунов Володимир Михайлович
Формула / Реферат
Багатокоординатний стіл, що містить електродвигун i гвинтові пари по кількості координатних переміщень, гвинтову зубчату передачу i відповідні напрямні, який відрізняється тим, що гвинтова зубчата передача виконана у вигляді трьох взаємно перпендикулярно розташованих гвинтових коліс, а з'єднані з ними через муфти гайки гвинтових пар спряжені з гвинтами, причому гвинти забезпечено гальмівними муфтами, а з'єднувальні i гальмівні муфти увімкнені інверсно до системи управління.
Текст
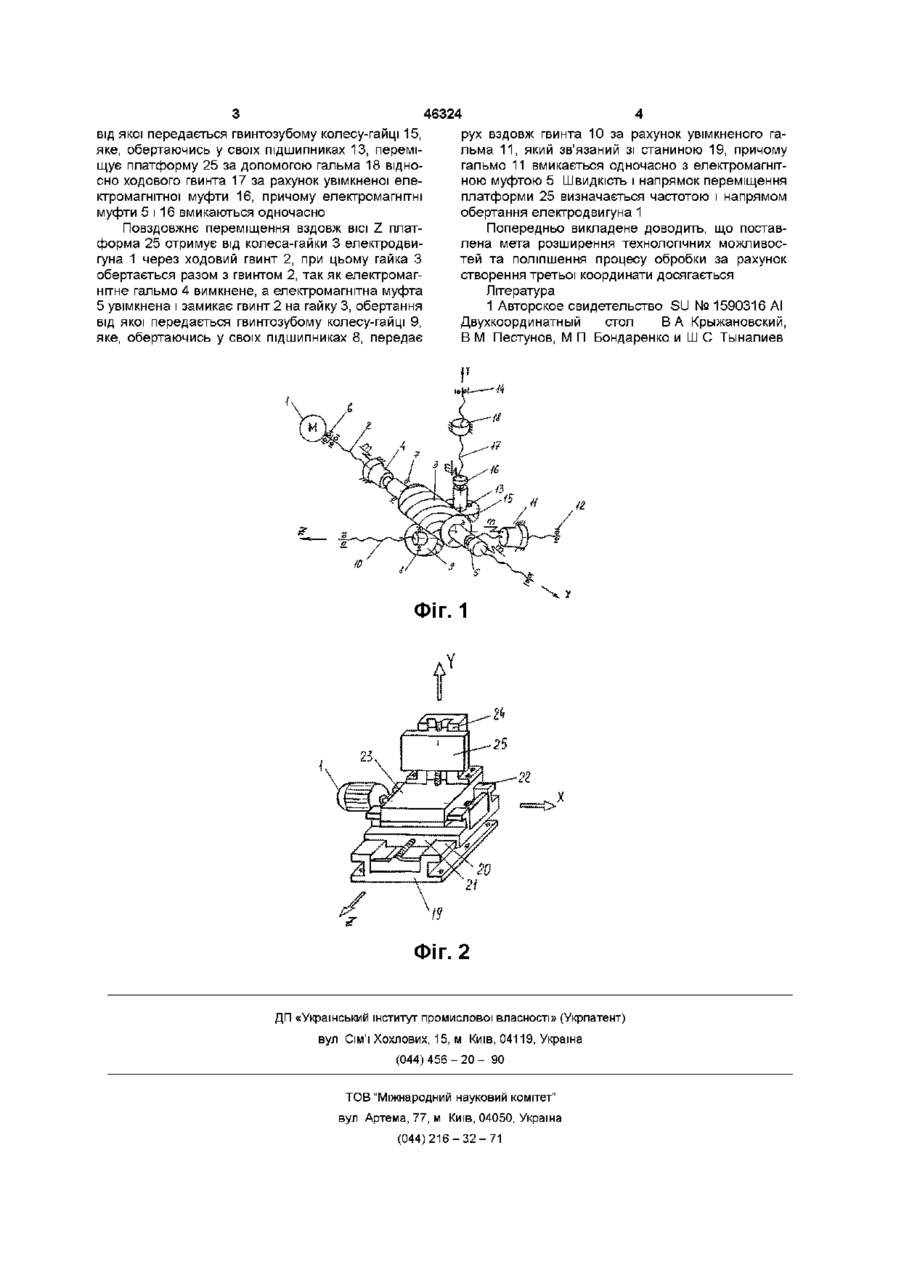
Багатокоординатний стіл, що містить електродвигун і гвинтові пари по КІЛЬКОСТІ координатних переміщень, гвинтову зубчату передачу і ВІДПОВІДНІ напрямні, який відрізняється тим, що гвинтова зубчата передача виконана у вигляді трьох взаємно перпендикулярно розташованих гвинтових коліс, а з'єднані з ними через муфти гайки гвинтових пар спряжені з гвинтами, причому гвинти забезпечено гальмівними муфтами, а з'єднувальні і гальмівні муфти увімкнені інверсно до системи управління Винахід відноситься до машинобудування, а саме до механізмів, які забезпечують лінійне переміщення різноманітних деталей за трьома координатами Відомий двохкоординатний стіл, який містить електродвигун і гвинтові пари по КІЛЬКОСТІ координатних переміщень, гвинтову зубчату передачу і ВІДПОВІДНІ напрямні, не вирішує проблеми вертикального переміщення робочого органу, що зменшує технологічні можливості верстата [1] Задача, яку вирішує винахід, полягає в розширенні технологічних можливостей та поліпшення процесу обробки за рахунок створення третьої координати Розширення технологічних можливостей досягається тим, що гвинтова зубчата передача виконана у вигляді трьох взаємно перпендикулярно розташованих гвинтових колес, а з'єднані з ними через муфти гайки гвинтових пар спряжені з гвинтами, причому гвинти забезпечені гальмівними муфтами, а з'єднувальні і гальмівні муфти увімкнені інверсно до системи управління На фіг 1 зображена кінематична схема приводу, на фіг 2 -багатокоординатний стіл, загальний вигляд Багатокоординатний стіл містить електродвигун 1, ходовий гвинт 2, гвинтозубе колесо-гайку З, електромагнітне гальмо 4, електромагнітну муфту 5, підшипники 6-8, гвинтозубе колесо-гайку 9, ходовий гвинт 10, електромагнітне гальмо 11, підшипники 12-14, гвинтозубе колесо-гайку 15, електромагнітну муфту 16, ходовий гвинт 17, гальмо 18, станину 19, повздовжні напрямні 20, поперечні салазки 21, напрямні 22, платформу 23, напрямні 24, платформу 25 Електродвигун 1 встановлений на поперечному столі і зв'язаний з ходовим гвинтом 2 у підшипниках 6, який в свою чергу зв'язаний з гвинтозубим колесом-гайкою 3, ступиця якої з'єднана з одного боку з електромагнітним гальмом 4, а з іншого - з електромагнітною муфтою 5 У зв'язок з колесом-гайкою 3 входять гвинтозубі колеса-гайки 9 і 15, зв'язані з ходовими гвинтами 10 і 17 ВІДПОВІДНО На повздовжніх напрямних 20 знаходяться поперечні салазки 21, на напрямних 22 встановлена платформа 23, на якій встановлена платформа 25 на напрямних 24 Багатокоординатний стіл працює наступним чином Платформа 25 може отримувати переміщення послідовно по трьом координатам, відносно ВІСІ X, Уабог Поперечне переміщення вздовж ВІСІ X платформа 25 отримує від колеса-гайки 3 електродвигуна 1 через ходовий гвинт 2, причому гайка 3 загальмована відносно салазок електромагнітним гальмом 4 при подачі на його котушку напруги, при цьому електромагнітна муфта 5 знеструмлена Вертикальне переміщення вздовж ВІСІ Y платформа 25 отримує від колеса-гайки 3 електродвигуна 1 через ходовий гвинт 2, при цьому гайка З обертається разом з гвинтом 2, так як електромагнітне гальмо 4 вимкнене, а електромагнітна муфта 5 увімкнена і замикає гвинт 2 на гайку 3, обертання со (О 46324 від якої передається гвинтозубому колесу-гайці 15, яке, обертаючись у своїх підшипниках 13, переміщує платформу 25 за допомогою гальма 18 відносно ходового гвинта 17 за рахунок увімкненої електромагнітної муфти 16, причому електромагнітні муфти 5 і 16 вмикаються одночасно Повздовжнє переміщення вздовж ВІСІ Z платформа 25 отримує від колеса-гайки 3 електродвигуна 1 через ходовий гвинт 2, при цьому гайка З обертається разом з гвинтом 2, так як електромагнітне гальмо 4 вимкнене, а електромагнітна муфта 5 увімкнена і замикає гвинт 2 на гайку 3, обертання від якої передається гвинтозубому колесу-гайці 9, яке, обертаючись у своїх підшипниках 8, передає рух вздовж гвинта 10 за рахунок увімкненого гальма 11, який зв'язаний зі станиною 19, причому гальмо 11 вмикається одночасно з електромагнітною муфтою 5 Швидкість І напрямок переміщення платформи 25 визначається частотою і напрямом обертання електродвигуна 1 Попередньо викладене доводить, що поставлена мета розширення технологічних можливостей та поліпшення процесу обробки за рахунок створення третьої координати досягається Література 1 Авторское свидетельство SU № 1590316 Al Двухкоординатный стол В А Крыжановский, В М Пестунов, М П Бондаренко и Ш С Тыналиев ФІГ. 1 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюKryzhanivskyi Volodymyr Andriiovych, Pestunov Volodymyr Mykhailovych
Автори російськоюКрижанивский Владимир Андреевич, Пестунов Владимир Михайлович
МПК / Мітки
МПК: B23Q 15/20
Мітки: стіл, багатокоординатний
Код посилання
<a href="https://ua.patents.su/2-46324-bagatokoordinatnijj-stil.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний стіл</a>
Багатокоординатний вібростенд
Номер патенту: 43014
Опубліковано: 15.11.2001
Автори: Бєлих Володимир Іванович, Божко Олександр Евгенович, Мягкохліб Костянтин Борисович
МПК: G01M 7/00
Мітки: багатокоординатний, вібростенд
Формула / Реферат:
Багатокоординатний вібростенд, що містить основу, платформу для установки випробуваного виробу, віброзбуджувачі, з'єднувальні вузли, блок віброперетворювачів, установлений на платформі і зв'язаний із системою керування, який відрізняється тим, що платформа виконана у формі порожнистого паралелепіпеда і зв'язана з основою з'єднувальними вузлами, що являють собою пружини, ортогонально сторонам платформи установлені віброзбуджувачі, виконані у...
Розсувний стіл

Номер патенту: 36027
Опубліковано: 16.04.2001
Автор: Романчук Михайло Адамович
МПК: A47B 1/00
Текст:
...необхідності збільшення довжини столу, рухові секції 5 і 6, які розташовані в основі 1 столу, висувають в протилежних напрямках до упору роликів 9 в пазах 10 основи 1. Після висування секцій 5 і 6 блок кришок 11 виймають з основи 1 і укладають на поверхню основи 1 та рухомих секцій 5 і 6. Складання столу здійснюють у зворотному, порядку. Фіг. 1 Фіг. 2 2 36027 Фіг. 3 Фіг. 4 3 36027 Фіг. 5 ...
Гвинтова передача

Номер патенту: 23741
Опубліковано: 16.06.1998
Автори: Маркович Іван Миколайович, Маркович Юрій Іванович, Сиротюк Віктор Володимирович
МПК: F16H 25/20
Формула / Реферат:
Гвинтова передача, яка включає ходовий гвинт і здвоєну збірну ходову гайку, одна з яких має на зовнішній поверхні зубчастий вінець, яка відрізняється тим, що гайки встановлені в спільному корпусі, одна - жорстко, а друга з можливістю обертання в цьому корпусі та створення натягу (виборки люфта) в гвинтовій парі і оснащена двовінцевою зубчастою муфтою, числа зубів вінців якої не рівні між собою і не мають спільних множників, при цьому кутова...
Стіл інваліда для роботи стоячи
Номер патенту: 294
Опубліковано: 26.02.1999
Автори: Мудренко Іван Дмитрович, Мальцев Леонід Вікторович
МПК: A47B 9/00
Мітки: роботи, стоячи, інваліда, стіл
Формула / Реферат:
1. Стіл Інваліда для роботи стоячи, який містить основу з опорою для стоп і з'єднані з основою з можливістю регулювання їх положення відносно основи стільцю з місцями затиску руками, опору для колін та опору для таза, який відрізняється тим, що місця для затиску руками виконані у вигляді закріплених на стільниці штирів.2, Стіл за п. 1, який відрізняється тим, що штирі виконані знімними.
Задній стіл безперервного трубопрокатного стана

Номер патенту: 39035
Опубліковано: 15.05.2001
Автори: Кондратьєв Сергій Валентинович, Кісіль Володимир Костянтинович, Сівак Владислав Олегович, Коган Михайло Маркович, Панюшкін Євген Миколайович
МПК: B21B 39/02
Мітки: стіл, стана, безперервного, задній, трубопрокатного
Текст:
...або на одному рівні з дном «в» жолобу 1, або нижче його. Пневмоциліндр 52 управляє роботою проводок, що відкриваються, 2. На транспортері 3 поперечного переміщення труби на довгій оправці розташовані захвати 53. Ролики 8 підтримують трубу 54 з довгою оправкою 55 (фіг. 6). Шиберний захват 11 опирається на бічну сторону 56 поздовжнього пазу 7 (фіг. 6). 3 39035 Ширина пазу 57 (фіг. 8) у шиберному захваті 11 відповідає діаметру шийки...
Попередній патент: Спосіб формування стійкої трахеостоми
Наступний патент: Повітряний сепаратор
Випадковий патент: Спосіб термомеханічної обробки дроту з дисперсійно-твердіючого елінварного сплаву