Автоматизована система автономної навігації
Номер патенту: 55294
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Дергачов Констянтин Юрійович, Грібков Антон Євгенович, Морозов Володимир Володимирович
Формула / Реферат
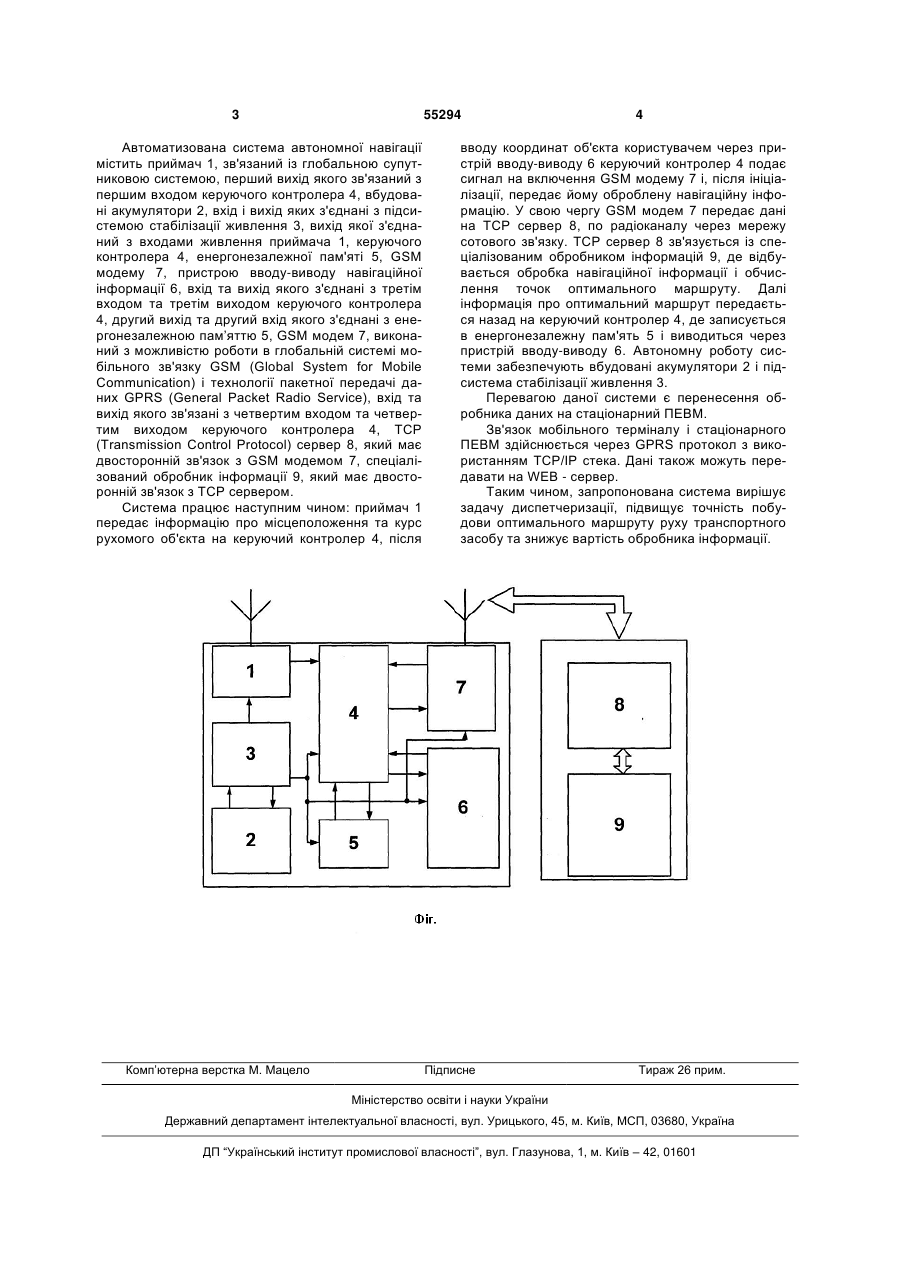
Автоматизована система автономної навігації, що містить приймач, зв'язаний із глобальною супутниковою системою, перший вихід якого зв'язаний з першим входом керуючого контролера, вбудовані акумулятори, вхід і вихід яких з'єднані з підсистемою стабілізації живлення, вихід якої з'єднаний з входами живлення приймача, керуючого контролера, енергонезалежної пам'яті, GSM модема і пристрою вводу-виводу навігаційної інформації, вхід та вихід якого з'єднані з третім входом та третім виходом керуючого контролера, другий вихід та другий вхід якого з'єднані з енергонезалежною пам'яттю, яка відрізняється тим, що в неї введений GSM модем, виконаний з можливістю роботи в глобальній системі мобільного зв'язку GSM (Global System for Mobile Communication) і технології пакетної передачі даних GPRS (General Packet Radio Service), вхід та вихід якого зв'язані з четвертим входом та четвертим виходом керуючого контролера, TCP (Transmission Control Protocol) сервер, який має двосторонній зв'язок з GSM модемом, і спеціалізований обробник інформації, який має двосторонній зв'язок з TCP сервером.
Текст
Автоматизована система автономної навігації, що містить приймач, зв'язаний із глобальною супутниковою системою, перший вихід якого зв'язаний з першим входом керуючого контролера, вбудовані акумулятори, вхід і вихід яких з'єднані з підсистемою стабілізації живлення, вихід якої з'єднаний з 3 55294 Автоматизована система автономної навігації містить приймач 1, зв'язаний із глобальною супутниковою системою, перший вихід якого зв'язаний з першим входом керуючого контролера 4, вбудовані акумулятори 2, вхід і вихід яких з'єднані з підсистемою стабілізації живлення 3, вихід якої з'єднаний з входами живлення приймача 1, керуючого контролера 4, енергонезалежної пам'яті 5, GSM модему 7, пристрою вводу-виводу навігаційної інформації 6, вхід та вихід якого з'єднані з третім входом та третім виходом керуючого контролера 4, другий вихід та другий вхід якого з'єднані з енергонезалежною пам’яттю 5, GSM модем 7, виконаний з можливістю роботи в глобальній системі мобільного зв'язку GSM (Global System for Mobile Communication) і технології пакетної передачі даних GPRS (General Packet Radio Service), вхід та вихід якого зв'язані з четвертим входом та четвертим виходом керуючого контролера 4, TCP (Transmission Control Protocol) сервер 8, який має двосторонній зв'язок з GSM модемом 7, спеціалізований обробник інформації 9, який має двосторонній зв'язок з TCP сервером. Система працює наступним чином: приймач 1 передає інформацію про місцеположення та курс рухомого об'єкта на керуючий контролер 4, після Комп’ютерна верстка М. Мацело 4 вводу координат об'єкта користувачем через пристрій вводу-виводу 6 керуючий контролер 4 подає сигнал на включення GSM модему 7 і, після ініціалізації, передає йому оброблену навігаційну інформацію. У свою чергу GSM модем 7 передає дані на TCP сервер 8, по радіоканалу через мережу сотового зв'язку. TCP сервер 8 зв'язується із спеціалізованим обробником інформацій 9, де відбувається обробка навігаційної інформації і обчислення точок оптимального маршруту. Далі інформація про оптимальний маршрут передається назад на керуючий контролер 4, де записується в енергонезалежну пам'ять 5 і виводиться через пристрій вводу-виводу 6. Автономну роботу системи забезпечують вбудовані акумулятори 2 і підсистема стабілізації живлення 3. Перевагою даної системи є перенесення обробника даних на стаціонарний ПЕВМ. Зв'язок мобільного терміналу і стаціонарного ПЕВМ здійснюється через GPRS протокол з використанням TCP/IP стека. Дані також можуть передавати на WEB - сервер. Таким чином, запропонована система вирішує задачу диспетчеризації, підвищує точність побудови оптимального маршруту руху транспортного засобу та знижує вартість обробника інформації. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated system of autonomous navigation
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Hribkov Anton Yevhenovych, Morozov Volodymyr Volodymyrovych
Назва патенту російськоюАвтоматизированная система автономной навигации
Автори російськоюКулик Анатолий Степанович, Дергачев Констянтин Юрьевич, Грибков Антон Евгениевич, Морозов Владимир Владимирович
МПК / Мітки
МПК: G01S 3/02
Мітки: навігації, автоматизована, система, автономно
Код посилання
<a href="https://ua.patents.su/2-55294-avtomatizovana-sistema-avtonomno-navigaci.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система автономної навігації</a>
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Морозов Володимир Володимирович, Дергачов Костянтин Юрійович, Грібков Антон Євгенович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: система, оптимального, транспортного, руху, маршруту, автоматизована, агрегату, побудови
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 18907
Опубліковано: 15.11.2006
Автори: Світличний Олександр Володимирович, Цеховський Максим Володимирович, Дергачова Ганна Володимирівна, Кошовий Микола Дмитрович, Сіроклин Віталій Павлович
МПК: G06F 17/00
Мітки: експерименту, система, проведення, багатофакторного, автоматизована
Формула / Реферат:
Автоматизована система для проведення багатофакторного експерименту, що містить елемент І, елемент HI, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, генератор імпульсів, елемент затримки, детектор фронту, виходи значень рівнів факторів, причому вихід елемента HI з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, вихід переносу двійкового лічильника з'єднаний з...
Автоматизована система контролю
Номер патенту: 63287
Опубліковано: 15.03.2007
Автори: Маслак Віктор Миколайович, Лютов Ігор Валерійович, Баранов Юрій Вячеславович, Бондар Анатолій Юрьйович
МПК: G08C 19/16, G08C 17/00
Мітки: система, автоматизована, контролю
Формула / Реферат:
Автоматизована система контролю, яка складається з диспетчерського пункту, який включає в себе послідовно з'єднані модем і радіостанцію, та винесеного технологічного контролера, в який включено модем, радіостанцію, пристрій узгодження з об’єктом, пристрій комутації і контролю резервного живлення, акумуляторну батарею, причому перший і другий входи та перший і другий виходи модема з'єднані з радіостанцією, а третій і четвертий входи і третій...
Автоматизована система пошуку оптимального покриття
Номер патенту: 20835
Опубліковано: 15.02.2007
Автори: Шипулін Олексій Ігорович, Чумаченко Ігор Володимирович, Дергачова Ганна Володимирівна, Доценко Наталія Володимирівна
МПК: G06F 17/00
Мітки: система, пошуку, покриття, автоматизована, оптимального
Формула / Реферат:
Автоматизована система пошуку оптимального покриття, що містить двійковий лічильник, блок пам'яті, виходи результату, групу інформаційних входів, два виходи пристрою, керуючий вхід, елемент І, причому виходи двійкового лічильника з'єднані з адресними входами блока пам'яті, групу керуючих входів, яка відрізняється тим, що містить k груп керуючих входів, k блоків множення векторів, k порогових елементів, блок керування, виходи рішень, причому...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 49801
Опубліковано: 11.05.2010
Автори: Оганесян Артем Семенович, Кошовий Микола Дмитрович, Цеховський Максим Володимирович, Дергачов Володимир Андрійович, Костенко Олена Михайлівна
МПК: G06F 17/00
Мітки: експерименту, автоматизована, система, проведення, багатофакторного
Формула / Реферат:
Автоматизована система для проведення багатофакторного експерименту, що містить елемент І, елемент НІ, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, генератор імпульсів, елемент затримки, детектор фронту, виходи значень рівнів факторів, суматор, входи номера варіанта, причому вихід елемента НІ з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, керуючий вхід...