Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Морозов Володимир Володимирович, Дергачов Костянтин Юрійович, Грібков Антон Євгенович, Кулік Анатолій Степанович
Формула / Реферат
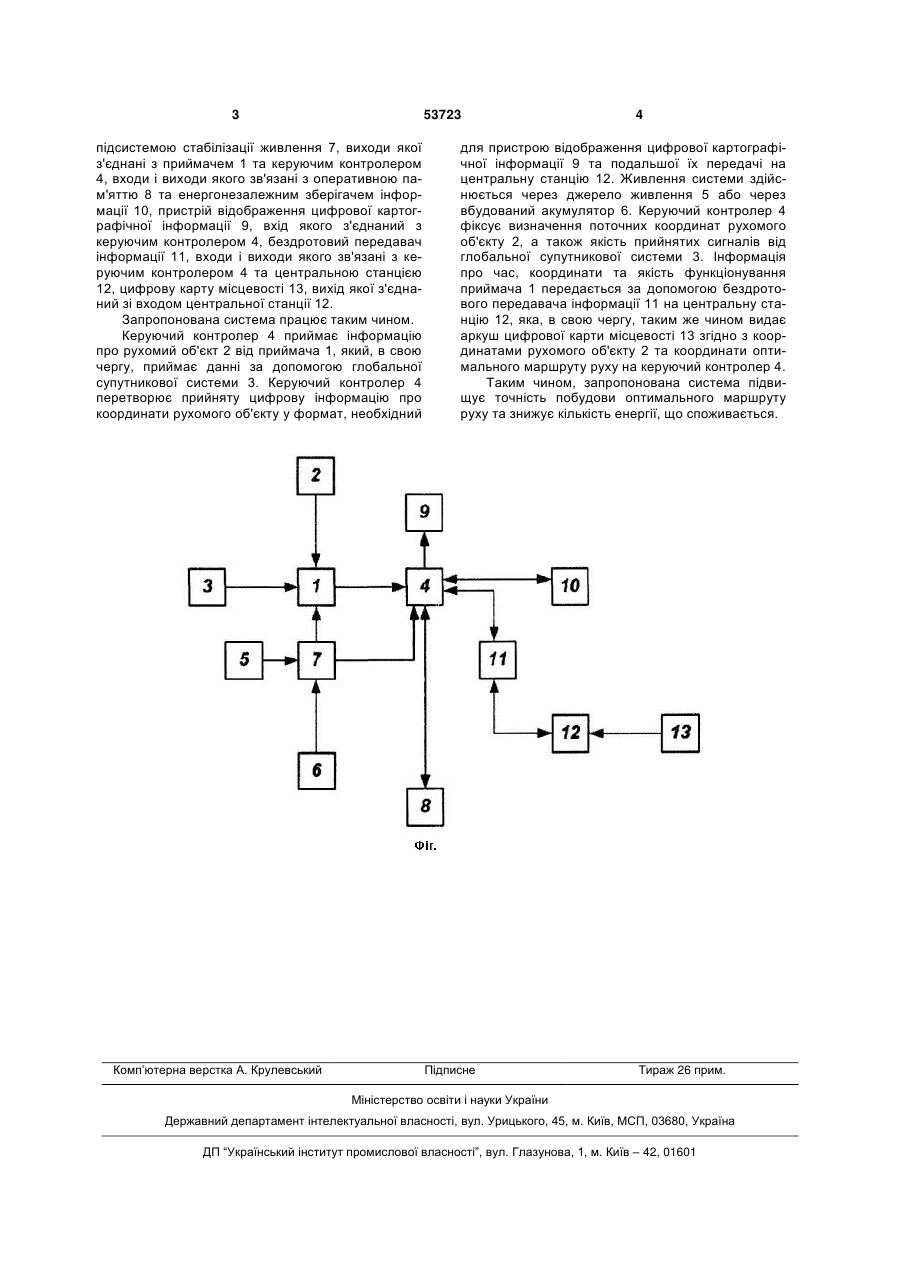
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, центральну станцію, яка відрізняється тим, що введені бездротовий передавач інформації, входи і виходи якого зв'язані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції.
Текст
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою 3 53723 підсистемою стабілізації живлення 7, виходи якої з'єднані з приймачем 1 та керуючим контролером 4, входи і виходи якого зв'язані з оперативною пам'яттю 8 та енергонезалежним зберігачем інформації 10, пристрій відображення цифрової картографічної інформації 9, вхід якого з'єднаний з керуючим контролером 4, бездротовий передавач інформації 11, входи і виходи якого зв'язані з керуючим контролером 4 та центральною станцією 12, цифрову карту місцевості 13, вихід якої з'єднаний зі входом центральної станції 12. Запропонована система працює таким чином. Керуючий контролер 4 приймає інформацію про рухомий об'єкт 2 від приймача 1, який, в свою чергу, приймає данні за допомогою глобальної супутникової системи 3. Керуючий контролер 4 перетворює прийняту цифрову інформацію про координати рухомого об'єкту у формат, необхідний Комп’ютерна верстка А. Крулевський 4 для пристрою відображення цифрової картографічної інформації 9 та подальшої їх передачі на центральну станцію 12. Живлення системи здійснюється через джерело живлення 5 або через вбудований акумулятор 6. Керуючий контролер 4 фіксує визначення поточних координат рухомого об'єкту 2, а також якість прийнятих сигналів від глобальної супутникової системи 3. Інформація про час, координати та якість функціонування приймача 1 передається за допомогою бездротового передавача інформації 11 на центральну станцію 12, яка, в свою чергу, таким же чином видає аркуш цифрової карти місцевості 13 згідно з координатами рухомого об'єкту 2 та координати оптимального маршруту руху на керуючий контролер 4. Таким чином, запропонована система підвищує точність побудови оптимального маршруту руху та знижує кількість енергії, що споживається. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated system for construction of optimal route of motion of transportation unit
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Morozov Volodymyr Volodymyrovych, Hribkov Anton Yevhenovych
Назва патенту російськоюАвтоматизированная система построения оптимального маршрута движения транспортного агрегата
Автори російськоюКулик Анатолий Степанович, Дергачов Константин Юрьевич, Морозов Владимир Владимирович, Грибков Антон Евгениевич
МПК / Мітки
МПК: G01S 3/02
Мітки: агрегату, транспортного, руху, побудови, оптимального, маршруту, автоматизована, система
Код посилання
<a href="https://ua.patents.su/2-53723-avtomatizovana-sistema-pobudovi-optimalnogo-marshrutu-rukhu-transportnogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система побудови оптимального маршруту руху транспортного агрегату</a>
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Дергачев Костянтин Юрійович, Дорош Ігор Сергійович, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: транспортного, визначення, маршруту, руху, система, об'єкта
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Автоматизована система пошуку оптимального покриття
Номер патенту: 20835
Опубліковано: 15.02.2007
Автори: Доценко Наталія Володимирівна, Шипулін Олексій Ігорович, Чумаченко Ігор Володимирович, Дергачова Ганна Володимирівна
МПК: G06F 17/00
Мітки: оптимального, система, автоматизована, покриття, пошуку
Формула / Реферат:
Автоматизована система пошуку оптимального покриття, що містить двійковий лічильник, блок пам'яті, виходи результату, групу інформаційних входів, два виходи пристрою, керуючий вхід, елемент І, причому виходи двійкового лічильника з'єднані з адресними входами блока пам'яті, групу керуючих входів, яка відрізняється тим, що містить k груп керуючих входів, k блоків множення векторів, k порогових елементів, блок керування, виходи рішень, причому...
Спосіб визначення маршруту руху наземного транспортного засобу у вибраний проміжок часу
Номер патенту: 57202
Опубліковано: 16.06.2003
Автор: Олексієнко Олег Володимирович
МПК: G01C 21/34, G01C 7/00
Мітки: спосіб, визначення, маршруту, засобу, транспортного, проміжок, часу, руху, вибраний, наземного
Формула / Реферат:
Спосіб визначення маршруту рухання наземного транспортного засобу у вибраний проміжок часу що включає читання дискретної інформації від супутників GPS та ГЛОНАСС про місцезнаходження наземного транспортного засобу, запис та зберігання отриманої інформації, обробку записаної інформації з допомогою спеціального програмного забезпечення комп'ютерів і вивід здобутих результатів в системах відображення інформації, який відрізняється тим, що для...
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Дергачов Костянтин Юрійович, Шишова Наталія Олександрівна, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: об'єкта, рухомого, місцезнаходження, система, відображення
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 49801
Опубліковано: 11.05.2010
Автори: Костенко Олена Михайлівна, Кошовий Микола Дмитрович, Оганесян Артем Семенович, Дергачов Володимир Андрійович, Цеховський Максим Володимирович
МПК: G06F 17/00
Мітки: система, багатофакторного, проведення, автоматизована, експерименту
Формула / Реферат:
Автоматизована система для проведення багатофакторного експерименту, що містить елемент І, елемент НІ, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, генератор імпульсів, елемент затримки, детектор фронту, виходи значень рівнів факторів, суматор, входи номера варіанта, причому вихід елемента НІ з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, керуючий вхід...
Попередній патент: Адаптивна система розвороту космічного літального апарата
Наступний патент: Імпульсний підсилювач потужності
Випадковий патент: Спосіб визначення тироксина у слині