Система керування літаком
Номер патенту: 63672
Опубліковано: 15.01.2004
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Теницька Яна Миколаївна, Западня Артем Валентинович

Формула / Реферат
Система керування літаком, що складається з важеля керування, зв'язаного механічною проводкою з золотниковою тягою кермового приводу, обчислювача, сервоприводу, паралельно підключеного до золотникової тяги і електрично зв'язаного з датчиком кута, вмонтованими в проводку керування, резервної завантажувальної пружини і пружинного пристрою негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з віссю пружини при нейтральному положенні важеля керування, яка відрізняється тим, що в неї введені датчик кутової швидкості і датчик кутового прискорення важеля керування, виходи яких підключені до обчислювача.
Текст
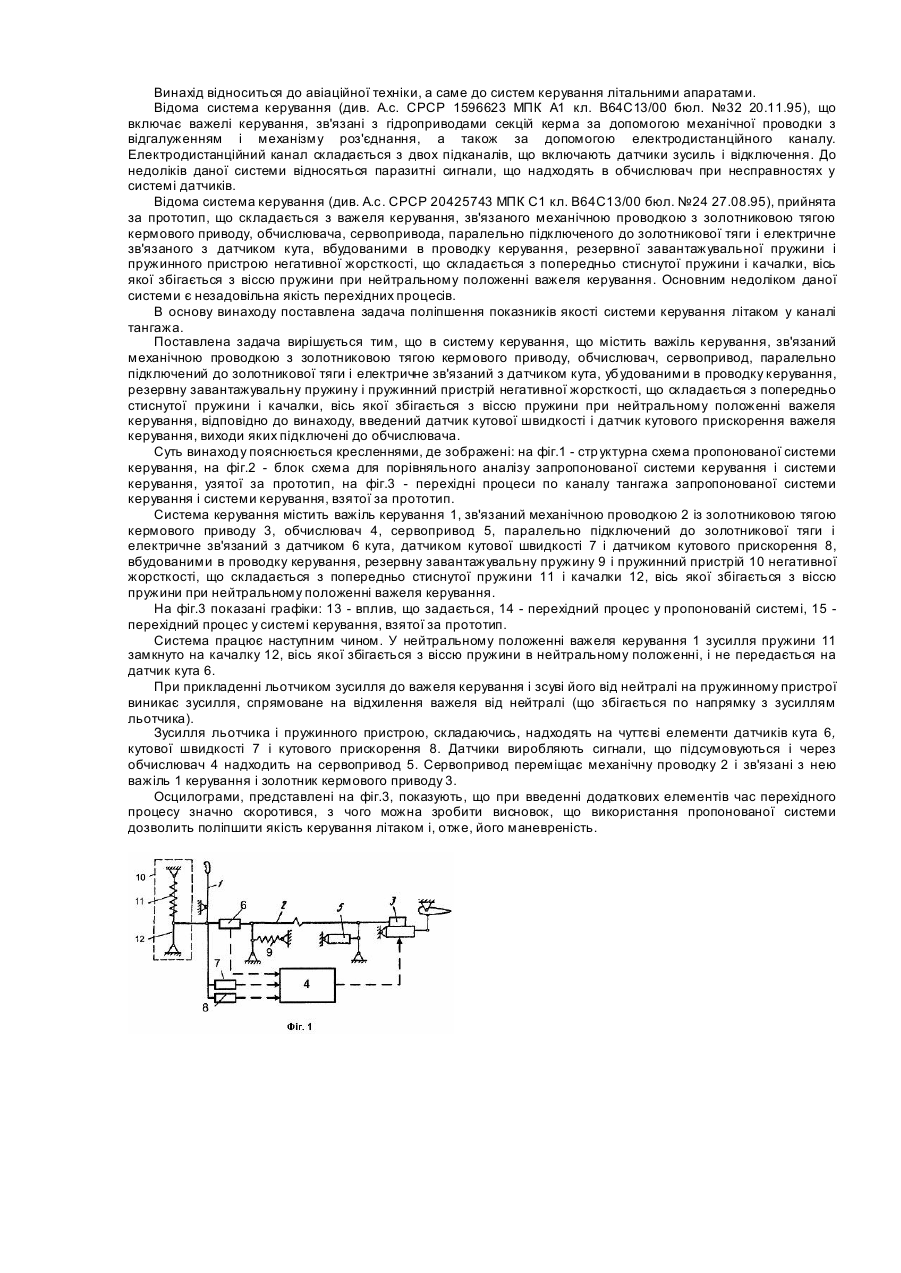
Винахід відноситься до авіаційної техніки, а саме до систем керування літальними апаратами. Відома система керування (див. А.с. СРСР 1596623 МПК Α1 кл. В64С13/00 бюл. №32 20.11.95), що включає важелі керування, зв'язані з гідроприводами секцій керма за допомогою механічної проводки з відгалуженням і механізму роз'єднання, а також за допомогою електродистанційного каналу. Електродистанційний канал складається з двох підканалів, що включають датчики зусиль і відключення. До недоліків даної системи відносяться паразитні сигнали, що надходять в обчислювач при несправностях у системі датчиків. Відома система керування (див. А.с. СРСР 20425743 МПК С1 кл. В64С13/00 бюл. №24 27.08.95), прийнята за прототип, що складається з важеля керування, зв'язаного механічною проводкою з золотниковою тягою кермового приводу, обчислювача, сервопривода, паралельно підключеного до золотникової тяги і електричне зв'язаного з датчиком кута, вбудованими в проводку керування, резервної завантажувальної пружини і пружинного пристрою негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з віссю пружини при нейтральному положенні важеля керування. Основним недоліком даної системи є незадовільна якість перехідних процесів. В основу винаходу поставлена задача поліпшення показників якості системи керування літаком у каналі тангажа. Поставлена задача вирішується тим, що в систему керування, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, обчислювач, сервопривод, паралельно підключений до золотникової тяги і електричне зв'язаний з датчиком кута, убудованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з віссю пружини при нейтральному положенні важеля керування, відповідно до винаходу, введений датчик кутової швидкості і датчик кутового прискорення важеля керування, виходи яких підключені до обчислювача. Суть винаходу пояснюється кресленнями, де зображені: на фіг.1 - стр уктурна схема пропонованої системи керування, на фіг.2 - блок схема для порівняльного аналізу запропонованої системи керування і системи керування, узятої за прототип, на фіг.3 - перехідні процеси по каналу тангажа запропонованої системи керування і системи керування, взятої за прототип. Система керування містить важіль керування 1, зв'язаний механічною проводкою 2 із золотниковою тягою кермового приводу 3, обчислювач 4, сервопривод 5, паралельно підключений до золотникової тяги і електричне зв'язаний з датчиком 6 кута, датчиком кутової швидкості 7 і датчиком кутового прискорення 8, вбудованими в проводку керування, резервну завантажувальну пружину 9 і пружинний пристрій 10 негативної жорсткості, що складається з попередньо стиснутої пружини 11 і качалки 12, вісь якої збігається з віссю пружини при нейтральному положенні важеля керування. На фіг.3 показані графіки: 13 - вплив, що задається, 14 - перехідний процес у пропонованій системі, 15 перехідний процес у системі керування, взятої за прототип. Система працює наступним чином. У нейтральному положенні важеля керування 1 зусилля пружини 11 замкнуто на качалку 12, вісь якої збігається з віссю пружини в нейтральному положенні, і не передається на датчик кута 6. При прикладенні льотчиком зусилля до важеля керування і зсуві його від нейтралі на пружинному пристрої виникає зусилля, спрямоване на відхилення важеля від нейтралі (що збігається по напрямку з зусиллям льотчика). Зусилля льотчика і пружинного пристрою, складаючись, надходять на чуттєві елементи датчиків кута 6, кутової швидкості 7 і кутового прискорення 8. Датчики виробляють сигнали, що підсумовуються і через обчислювач 4 надходить на сервопривод 5. Сервопривод переміщає механічну проводку 2 і зв'язані з нею важіль 1 керування і золотник кермового приводу 3. Осцилограми, представлені на фіг.3, показують, що при введенні додаткових елементів час перехідного процесу значно скоротився, з чого можна зробити висновок, що використання пропонованої системи дозволить поліпшити якість керування літаком і, отже, його маневреність.
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft control system
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych
Назва патенту російськоюСистема управления самолетом
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: керування, літаком, система
Код посилання
<a href="https://ua.patents.su/2-63672-sistema-keruvannya-litakom.html" target="_blank" rel="follow" title="База патентів України">Система керування літаком</a>
Установка поверхонь керування літаком з крилом великого звуження
Номер патенту: 49190
Опубліковано: 16.09.2002
Автор: Моргун Олександр Павлович
МПК: B64C 9/00
Мітки: великого, літаком, крилом, установка, керування, звуження, поверхонь
Формула / Реферат:
Установка поверхонь керування літаком з крилом великого звуження, утворена закрилками на крилі, хвостовим стабілізатором, установленим між кілями на хвостових балках, з рулями напрямку на кілях, яка відрізняється тим, що крило літака виконано зі збільшеними стрілоподібністю і кореневою хордою, хвостові балки включені до силового набору крила; хвостовий стабілізатор несиметричного перевернутого профілю установлений над задньою кромкою крила з...
Система керування вогнем танка
Номер патенту: 49989
Опубліковано: 15.10.2002
Автори: Бусяк Юрій Митрофанович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович, Походняков Валерій Георгійович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: керування, система, вогнем, танка
Формула / Реферат:
1. Система керування вогнем танка, що містить денний приціл, який складається з гіростабілізатора і кінематично зв'язаних з ним головного дзеркала прицілу і датчика кута вертикального наведення, балістичний обчислювач, вхід якого з'єднаний з датчиком кута вертикального наведення, а вихід якого з'єднаний з приводом гармати, яка кінематично зв'язана з датчиком кута вертикального наведення і датчиком положення гармати, нічний приціл, що...
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Єрдаков Євген Володимирович, Хандога Анатолій Максимович, Мошнін Віктор Миколайович
МПК: F41G 5/00
Мітки: система, вогнем, танка, керування
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: вогнем, система, керування, танка
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Бусяк Юрій Митрофанович, Фролов Леонід Андрійович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: вогнем, система, керування, танка
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Попередній патент: Спосіб лікування сальмонельозу
Наступний патент: Антивірусний препарат альтабор та спосіб його одержання
Випадковий патент: Збірний шліфувальний круг