Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Машков Олег Альбертович, Савченко Віталій Анатолійович, Кравченко Юрій Васильович, Мосов Сергій Петрович
Формула / Реферат
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Текст
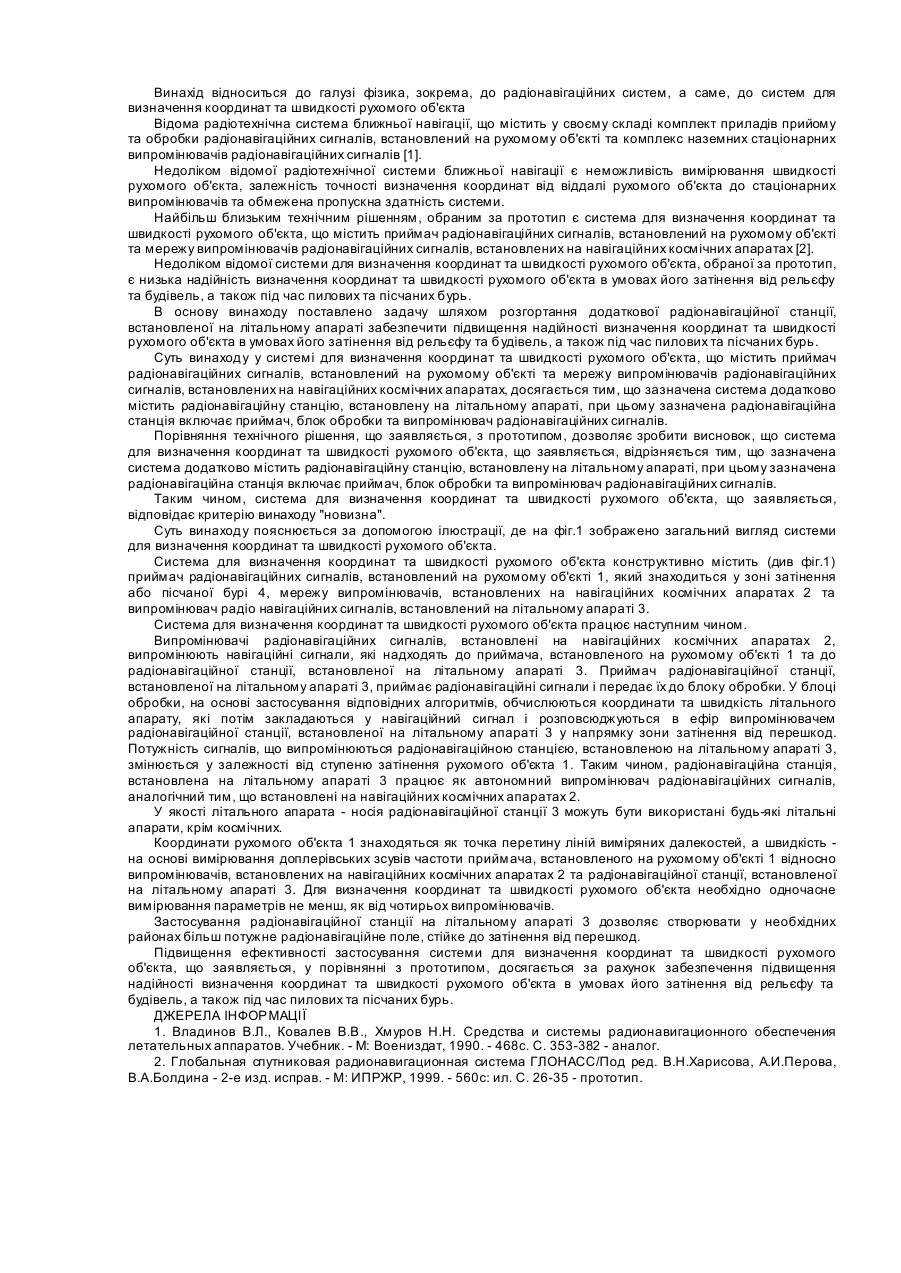
Винахід відноситься до галузі фізика, зокрема, до радіонавігаційних систем, а саме, до систем для визначення координат та швидкості рухомого об'єкта Відома радіотехнічна система ближньої навігації, що містить у своєму складі комплект приладів прийому та обробки радіонавігаційних сигналів, встановлений на рухомому об'єкті та комплекс наземних стаціонарних випромінювачів радіонавігаційних сигналів [1]. Недоліком відомої радіотехнічної системи ближньої навігації є неможливість вимірювання швидкості рухомого об'єкта, залежність точності визначення координат від віддалі рухомого об'єкта до стаціонарних випромінювачів та обмежена пропускна здатність системи. Найбільш близьким технічним рішенням, обраним за прототип є система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах [2]. Недоліком відомої системи для визначення координат та швидкості рухомого об'єкта, обраної за прототип, є низька надійність визначення координат та швидкості рухомого об'єкта в умовах його затінення від рельєфу та будівель, а також під час пилових та пісчаних бурь. В основу винаходу поставлено задачу шляхом розгортання додаткової радіонавігаційної станції, встановленої на літальному апараті забезпечити підвищення надійності визначення координат та швидкості рухомого об'єкта в умовах його затінення від рельєфу та будівель, а також під час пилових та пісчаних бурь. Суть винаходу у системі для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, досягається тим, що зазначена система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, при цьому зазначена радіонавігаційна станція включає приймач, блок обробки та випромінювач радіонавігаційних сигналів. Порівняння технічного рішення, що заявляється, з прототипом, дозволяє зробити висновок, що система для визначення координат та швидкості рухомого об'єкта, що заявляється, відрізняється тим, що зазначена система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, при цьому зазначена радіонавігаційна станція включає приймач, блок обробки та випромінювач радіонавігаційних сигналів. Таким чином, система для визначення координат та швидкості рухомого об'єкта, що заявляється, відповідає критерію винаходу "новизна". Суть винаходу пояснюється за допомогою ілюстрації, де на фіг.1 зображено загальний вигляд системи для визначення координат та швидкості рухомого об'єкта. Система для визначення координат та швидкості рухомого об'єкта конструктивно містить (див фіг.1) приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті 1, який знаходиться у зоні затінення або пісчаної бурі 4, мережу випромінювачів, встановлених на навігаційних космічних апаратах 2 та випромінювач радіо навігаційних сигналів, встановлений на літальному апараті 3. Система для визначення координат та швидкості рухомого об'єкта працює наступним чином. Випромінювачі радіонавігаційних сигналів, встановлені на навігаційних космічних апаратах 2, випромінюють навігаційні сигнали, які надходять до приймача, встановленого на рухомому об'єкті 1 та до радіонавігаційної станції, встановленої на літальному апараті 3. Приймач радіонавігаційної станції, встановленої на літальному апараті 3, приймає радіонавігаційні сигнали і передає їх до блоку обробки. У блоці обробки, на основі застосування відповідних алгоритмів, обчислюються координати та швидкість літального апарату, які потім закладаються у навігаційний сигнал і розповсюджуються в ефір випромінювачем радіонавігаційної станції, встановленої на літальному апараті 3 у напрямку зони затінення від перешкод. Потужність сигналів, що випромінюються радіонавігаційною станцією, встановленою на літальному апараті 3, змінюється у залежності від ступеню затінення рухомого об'єкта 1. Таким чином, радіонавігаційна станція, встановлена на літальному апараті 3 працює як автономний випромінювач радіонавігаційних сигналів, аналогічний тим, що встановлені на навігаційних космічних апаратах 2. У якості літального апарата - носія радіонавігаційної станції 3 можуть бути використані будь-які літальні апарати, крім космічних. Координати рухомого об'єкта 1 знаходяться як точка перетину ліній виміряних далекостей, а швидкість на основі вимірювання доплерівських зсувів частоти приймача, встановленого на рухомому об'єкті 1 відносно випромінювачів, встановлених на навігаційних космічних апаратах 2 та радіонавігаційної станції, встановленої на літальному апараті 3. Для визначення координат та швидкості рухомого об'єкта необхідно одночасне вимірювання параметрів не менш, як від чотирьох випромінювачів. Застосування радіонавігаційної станції на літальному апараті 3 дозволяє створювати у необхідних районах більш потужне радіонавігаційне поле, стійке до затінення від перешкод. Підвищення ефективності застосування системи для визначення координат та швидкості рухомого об'єкта, що заявляється, у порівнянні з прототипом, досягається за рахунок забезпечення підвищення надійності визначення координат та швидкості рухомого об'єкта в умовах його затінення від рельєфу та будівель, а також під час пилових та пісчаних бурь. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. Владинов В.Л., Ковалев В.В., Хмуров Н.Н. Средства и системы радионавигационного обеспечения летательных аппаратов. Учебник. - М: Воениздат, 1990. - 468с. С. 353-382 - аналог. 2. Глобальная спутниковая радионавигационная система ГЛОНАСС/Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина - 2-е изд. исправ. - М: ИПРЖР, 1999. - 560с: ил. С. 26-35 - прототип.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determining coordinates and velocities of movable objects
Автори англійськоюMosov Serhii Petrovych, Kravchenko Yurii Vasyliovych, Savchenko Vitalii Andriiovych
Назва патенту російськоюСистема для определения координат и скоростей подвижных объектов
Автори російськоюМосов Сергей Петрович, Кравченко Юрий Васильевич, Савченко Виталий Анатолиевич
МПК / Мітки
МПК: G01S 5/02
Мітки: система, рухомого, координат, об'єкта, швидкості, визначення
Код посилання
<a href="https://ua.patents.su/2-69200-sistema-dlya-viznachennya-koordinat-ta-shvidkosti-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система для визначення координат та швидкості рухомого об’єкта</a>
Локальна радіонавігаційна система

Номер патенту: 68960
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Савченко Віталій Анатолійович, Кравченко Юрій Васильович, Машков Олег Альбертович
МПК: G01S 5/02
Мітки: система, радіонавігаційна, локальна
Формула / Реферат:
Локальна радіонавігаційна система, що містить сукупність приймачів радіонавігаційних сигналів від глобальної навігаційної супутникової системи, встановлених на рухомих об'єктах, мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах та один або декілька стаціонарних наземних випромінювачів, яка відрізняється тим, що система додатково містить мережу випромінювачів радіонавігаційних сигналів,...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч, Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Борісов Андрєй Владіміровіч, Карпов Анатолій Стєпановіч
МПК: G01S 5/04, G01S 5/02, G01S 5/00
Мітки: осей, визначення, спосіб, навігаційної, системі, об'єкта, базової, варіанти, інерціальної, положення, відносної, координат
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб прецизійного виміру координат і вектора швидкості об’єкта, що відбиває

Номер патенту: 42195
Опубліковано: 15.10.2001
Автори: Сорокін Олександр Федорович, Власенко Володимир Петрович
МПК: H01G 13/00, H01G 15/00
Мітки: вектора, прецизійного, об'єкта, координат, спосіб, відбиває, виміру, швидкості
Формула / Реферат:
1. Спосіб прецизійного виміру координат і вектора швидкості об'єкта, що відбиває, який включає опромінювання його зондувальними електромагнітними хвилями; реєстрацію відбитого від об'єкта луни-сигналу декількома приймальними системами, подальший аналіз і розрахунок координат, який відрізняється тим, що луна-сигнал, що з’являється при перетині об'єктом зони видимості, приймають трьома ідентичними, незалежними каналами, розміщеними в одній...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Драбич Олег Петрович, Яворський Ігор Миколайович, Драбич Петро Петрович
МПК: G01R 33/00, G01V 3/10
Мітки: визначення, інженерних, комунікацій, координат, система, електромагнітна
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Електромагнітна система визначення координат підземних комунікацій
Номер патенту: 28487
Опубліковано: 16.10.2000
Автори: Кичма Андрій Олексійович, Драбич Петро Петрович, Зубик Йосиф Львович, Стецько Ігор Григорович
МПК: E03F 7/00, G01R 33/02, G01R 19/00
Мітки: система, комунікацій, електромагнітна, координат, визначення, підземних
Формула / Реферат:
Електромагнітна система визначення координат підземних комунікацій, що складається з першого і другого однокомпонентних датчиків магнітного поля, розташованих в площині, перпендикулярній трубопроводу, послідовно включені підсилювач, амплітудний детектор, вихідний індикатор, третій однокомпонентний датчик магнітного поля, нуль-індикатор, індикатор рівня, регулятор підсилення і перемикач, причому третій однокомпонентний датчик магнітного поля...