Спосіб прецизійного виміру координат і вектора швидкості об’єкта, що відбиває
Номер патенту: 42195
Опубліковано: 15.10.2001
Автори: Сорокін Олександр Федорович, Власенко Володимир Петрович

Формула / Реферат
1. Спосіб прецизійного виміру координат і вектора швидкості об'єкта, що відбиває, який включає опромінювання його зондувальними електромагнітними хвилями; реєстрацію відбитого від об'єкта луни-сигналу декількома приймальними системами, подальший аналіз і розрахунок координат, який відрізняється тим, що луна-сигнал, що з’являється при перетині об'єктом зони видимості, приймають трьома ідентичними, незалежними каналами, розміщеними в одній приймальній системі, центри зон видимості яких рознесені в картинній площині на відстані, визначувані заданою точністю, так, що самі зони видимості частково перекриваються, вимірюють тривалість відеосигналів в кожному з трьох каналів, часовий зсув сигналів один відносно одного, розраховують вектор швидкості і координати об'єкта відносно заданої в картинній площині системи координат, орієнтацію і координати початку якої розраховують по відомому розташуванню осі приймальної системи.
2. Спосіб по п.1, який відрізняється тим, що реєстрацію об'єкта, випромінюючого в діапазоні електромагнітних хвиль, проводять на частоті, відповідній максимуму його випромінювання, без опромінювання зондувальними електромагнітними хвилями.
Текст
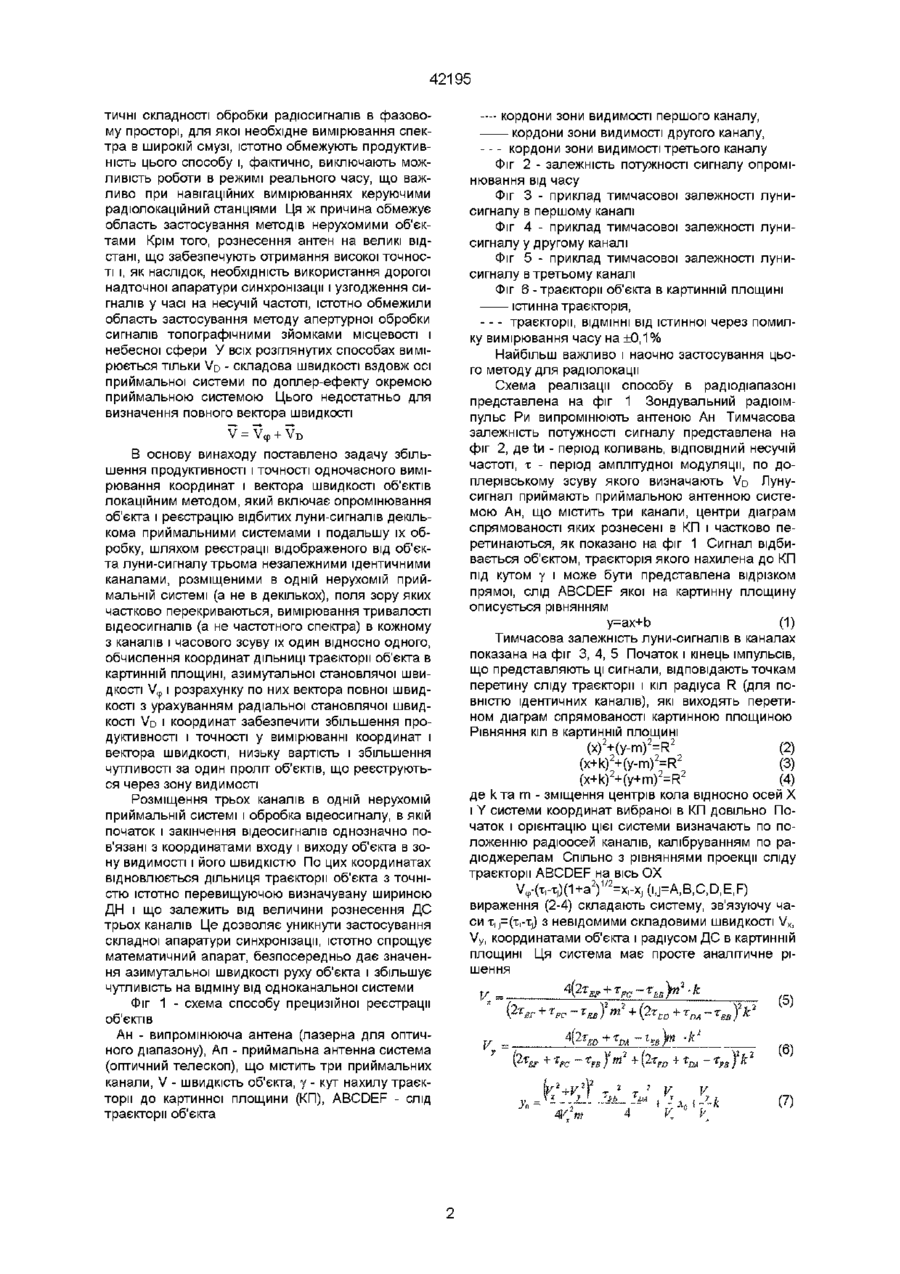
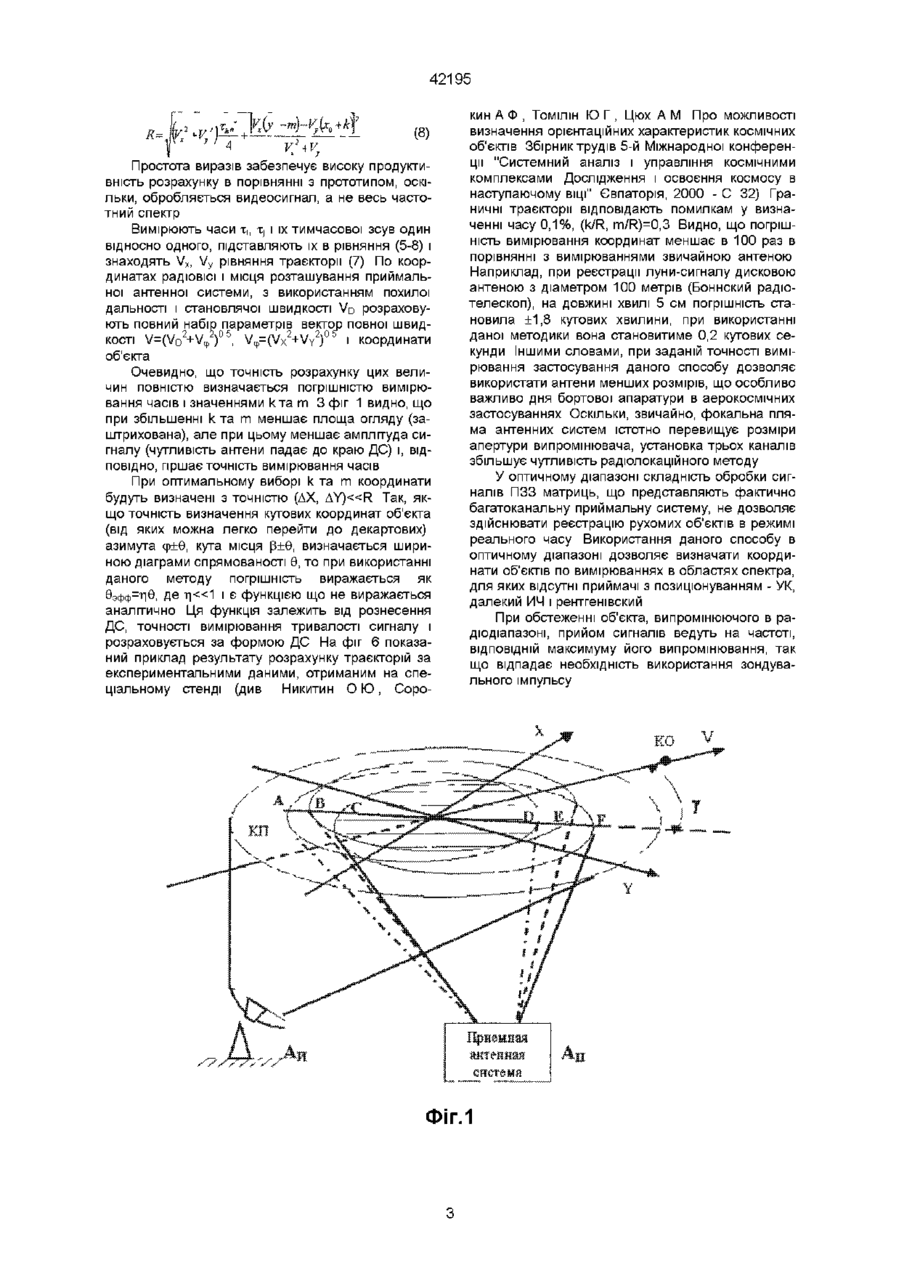
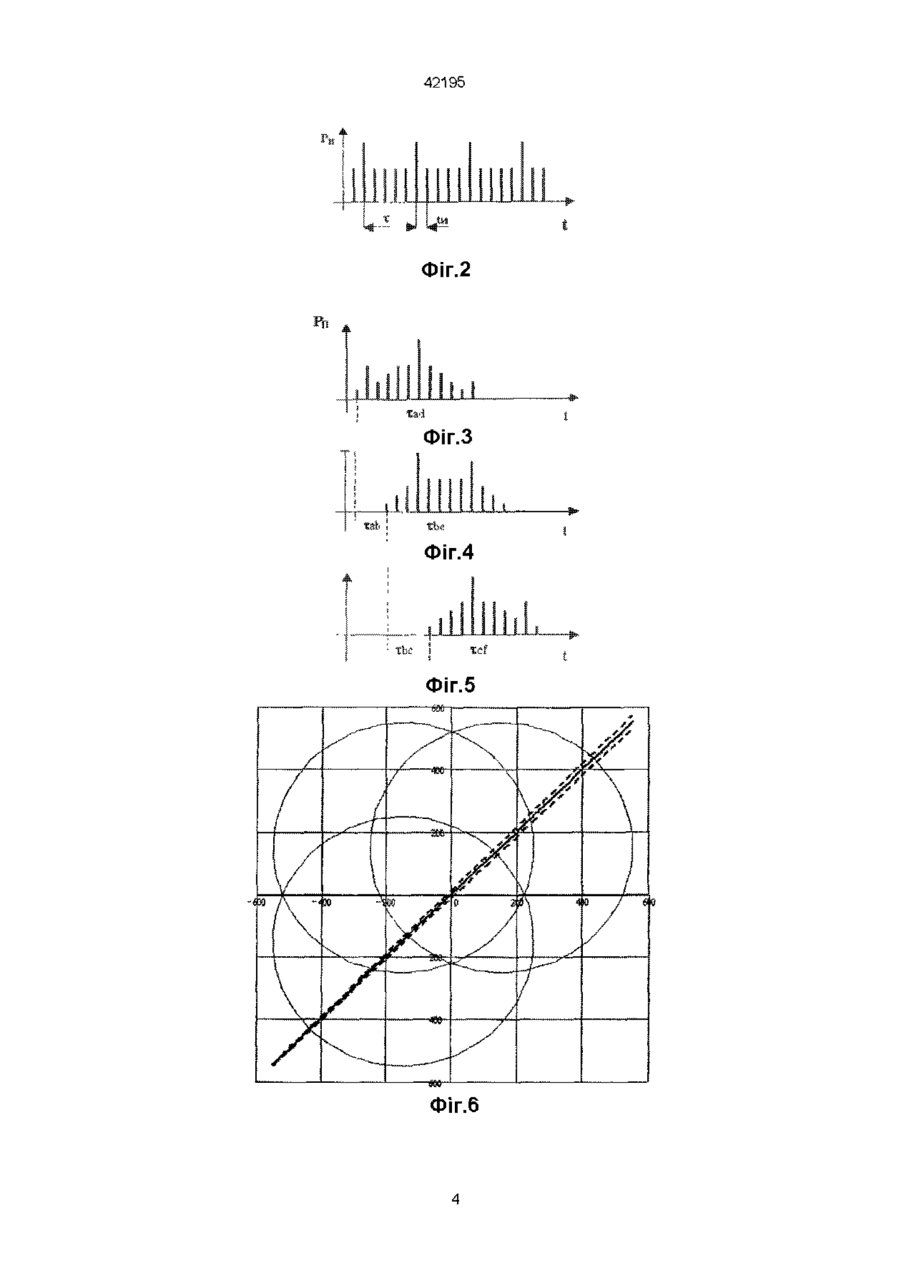
1 Спосіб прецизійного виміру координат і вектора швидкості об'єкта, що відбиває, який включає опромінювання його зондувальними електромагнітними хвилями, реєстрацію відбитого від об'єкта луни-сигналу декількома приймальними системами, подальший аналіз і розрахунок координат, який відрізняється тим, що луна-сигнал, що з'являється при перетині об'єктом зони видимості, приймають трьома ідентичними, незалежними ка налами, розміщеними в одній приймальній системі, центри зон видимості яких рознесені в картинній площині на відстані, визначувані заданою точністю, так, що самі зони видимості частково перекриваються, вимірюють тривалість відеосигналів в кожному з трьох каналів, часовий зсув сигналів один відносно одного, розраховують вектор швидкості і координати об'єкта відносно заданої в картинній площині системи координат, орієнтацію і координати початку якої розраховують по відомому розташуванню осі приймальної системи 2 Спосіб по п 1, який відрізняється тим, що реєстрацію об'єкта, випромінюючого в діапазоні електромагнітних хвиль, проводять на частоті, ВІДПОВІДНІЙ максимуму його випромінювання, без опромінювання зондувальними електромагнітними хвилями Винахід відноситься до області локаційної техніки, а саме, до техніки виявлення, реєстрації і супроводу наземних об'єктів, морських і повітряних суден, космічних апаратів і тіл При реєстрації координат і швидкостей об'єктів локаційними методами помилки вимірювання визначаються якістю приймальної системи і залежать від 1) дозволу детектора в полі зору для оптики, для радіодіапазону - ширина діаграми спрямованості (ДС), теоретична межа якої ймальною системою У радіодіапазоні використовують антени великого розміру, звужуючи ДС антени згідно з співвідношенням 6=A,/d Збільшення точності вимірювання координат таким шляхом приводить до зростання помилок наведення механічного характеру і, ВІДПОВІДНО, зростанню похибки у вимірюванні швидкості супроводу Механічні обмеження на швидкості обертання у великогабаритних антенних системах в режимі супроводу об'єктів, не дозволяють використати цей спосіб для вимірювання швидкості швидких об'єктів де X - довжина хвилі випромінювання, d - характерний фізичний розмір приймальної системи (довжина вібратора, ширина полотна антенної ґратки, діаметр дискової антени для радіодіапазону або лінійна апертура для оптичної системи), 2) помилки наведення приймальної системи при вимірюванні координат, 3) точність вимірювання швидкості супроводу об'єкта при вимірюванні азимутальної (вздовж траєкторії) становлячої швидкості \/ф Для зменшення погрішності вимірювання координат в оптичному діапазоні використовують прилади із зарядовим зв'язком (ПЗЗ), які характеризуються великими часами накопичення, що не дозволяє вимірювати швидкість об'єктів однією при Найбільш близьким, по суті, є спосіб, в якому для збільшення точності вимірювання координат використовують обробку сигналів декількох приймальних систем як і в способі, що пропонується (радюштерферометрія з довгою базою (РДБ) або із наддовгою базою (РНДБ), які останнім часом використовуються і в оптичному діапазоні) (див Довідник по радіолокації / Под ред М Скольник М Радянське радіо, 1977 -С 337-362) Для цього сигнали від декількох антенних систем, рознесених на відстань L (або безперервний сигнал однієї антени, яку переміщують на відстань L) обробляють по спеціальному алгоритму на несучій частоті Ця обробка укладається у відповідному регулюванні фази сигналів і подальшому формуванні ДС векторним підсумовуванням з урахуванням вагових коефіцієнтів Технічні і матема ю 42195 тичні складності обробки радіосигналів в фазовому просторі, для якої необхідне вимірювання спектра в широкій смузі, істотно обмежують продуктивність цього способу і, фактично, виключають можливість роботи в режимі реального часу, що важливо при навігаційних вимірюваннях керуючими радіолокаційний станціями Ця ж причина обмежує область застосування методів нерухомими об'єктами Крім того, рознесення антен на великі відстані, що забезпечують отримання високої точності і, як наслідок, необхідність використання дорогої надточної апаратури синхронізації і узгодження сигналів у часі на несучій частоті, істотно обмежили область застосування методу апертурної обробки сигналів топографічними зйомками місцевості і небесної сфери У всіх розглянутих способах вимірюється тільки VD - складова швидкості вздовж осі приймальної системи по доплер-ефекту окремою приймальною системою Цього недостатньо для визначення повного вектора швидкості V = У ф + VD В основу винаходу поставлено задачу збільшення продуктивності і точності одночасного вимірювання координат і вектора швидкості об'єктів локаційним методом, який включає опромінювання об'єкта і реєстрацію відбитих луни-сигналів декількома приймальними системами і подальшу їх обробку, шляхом реєстрації відображеного від об'єкта луни-сигналу трьома незалежними ідентичними каналами, розміщеними в одній нерухомій приймальній системі (а не в декількох), поля зору яких частково перекриваються, вимірювання тривалості відеосигналів (а не частотного спектра) в кожному з каналів і часового зсуву їх один відносно одного, обчислення координат ДІЛЬНИЦІ траєкторії об'єкта в картинній площині, азимутальної становлячої швидкості \/ф і розрахунку по них вектора повної швидкості з урахуванням радіальної становлячої швидкості VD І координат забезпечити збільшення продуктивності і точності у вимірюванні координат і вектора швидкості, низьку вартість і збільшення чутливості за один проліт об'єктів, що реєструються через зону видимості Розміщення трьох каналів в одній нерухомій приймальній системі і обробка відеосигналу, в якій початок і закінчення відеосигналів однозначно пов'язані з координатами входу і виходу об'єкта в зону видимості і його швидкістю По цих координатах відновлюється дільниця траєкторії об'єкта з точністю істотно перевищуючою визначувану шириною ДН і що залежить від величини рознесення ДС трьох каналів Це дозволяє уникнути застосування складної апаратури синхронізації, істотно спрощує математичний апарат, безпосередньо дає значення азимутальної швидкості руху об'єкта і збільшує чутливість на відміну від одноканальної системи Фіг 1 - схема способу прецизійної реєстрації об'єктів Ан - випромінююча антена (лазерна для оптичного діапазону), Ап - приймальна антенна система (оптичний телескоп), що містить три приймальних канали, V - швидкість об'єкта, у - кут нахилу траєкторії до картинної площини (КП), ABCDEF - слід траєкторії об'єкта —• кордони зони видимості першого каналу, кордони зони видимості другого каналу, — кордони зони видимості третього каналу Фіг 2 - залежність потужності сигналу опромінювання від часу Фіг 3 - приклад тимчасової залежності лунисигналу в першому каналі Фіг 4 - приклад тимчасової залежності лунисигналу у другому каналі Фіг 5 - приклад тимчасової залежності лунисигналу в третьому каналі Фіг 6 - траєкторії об'єкта в картинній площині істинна траєкторія, — траєкторії, ВІДМІННІ від істинної через помилку вимірювання часу на ±0,1% Найбільш важливо і наочно застосування цього методу для радіолокації Схема реалізації способу в радіодіапазоні представлена на фіг 1 Зондувальний радіоімпульс Ри випромінюють антеною Ан Тимчасова залежність потужності сигналу представлена на фіг 2, де tn - період коливань, ВІДПОВІДНИЙ несучій частоті, х - період амплітудної модуляції, по доплерівському зсуву якого визначають VD Лунусигнал приймають приймальною антенною системою Ан, що містить три канали, центри діаграм спрямованості яких рознесені в КП і частково перетинаються, як показано на фіг 1 Сигнал відбивається об'єктом, траєкторія якого нахилена до КП під кутом у і може бути представлена відрізком прямої, слід ABCDEF якої на картинну площину описується рівнянням у=ах+Ь (1) Тимчасова залежність луни-сигналів в каналах показана на фіг 3, 4, 5 Початок і кінець імпульсів, що представляють ці сигнали, відповідають точкам перетину сліду траєкторії і кіл радіуса R (для повністю ідентичних каналів), які виходять перетином діаграм спрямованості картинною площиною Рівняння КІЛ В картинній площині (x)2+(y-m)2=R2 (2) (x+k)2+(y-m)2=R2 (3) (x+k)2+(y+m)2=R2 (4) де к т а m - зміщення центрів кола відносно осей X і Y системи координат вибраної в КП довільно Початок і орієнтацію цієї системи визначають по положенню радюосей каналів, калібруванням по радюджерелам Спільно З рівняннями проекції сліду траєкторії ABCDEF на вісь ОХ V(p-Cx,-Xj)C1+a2)1/2=^-xJ(ilj=AlB,ClDlElF) вираження (2-4) складають систему, зв'язуючу часи Т|,=(тгт,) з невідомими складовими швидкості Vx, Vy, координатами об'єкта і радіусом ДС в картинній площині Ця система має просте аналітичне рішення (5) (2г£ 4(2% ED hT + X DA л--г .....г Ym + Пт 2 т 4 7 +т -? V К Yk' (6) (7) 42195 кин А Ф , ТОМІЛІН Ю Г , Цюх А М Про можливості a/')\^ \~ *! A+ £iX^_ZlZLl__L (8) ~ V?AV, Простота виразів забезпечує високу продуктивність розрахунку в порівнянні з прототипом, оскільки, обробляється видеосигнал, а не весь частотний спектр Вимірюють часи х,, х, і їх тимчасової зсув один відносно одного, підставляють їх в рівняння (5-8) і знаходять Vx, Vy рівняння траєкторії (7) По координатах радювісі і місця розташування приймальної антенної системи, з використанням похилої дальності і становлячої швидкості VD розраховують повний набір параметрів вектор повної швидкості \/=(\/о2+\/ф )° 5 , V 9 =(VX 2 +VY 2 )° І координати об'єкта Очевидно, що точність розрахунку цих величин повністю визначається погрішністю вимірювання часів і значеннями кта m 3 фіг 1 видно, що при збільшенні к та m меншає площа огляду (заштрихована), але при цьому меншає амплітуда сигналу (чутливість антени падає до краю ДС) і, ВІДПОВІДНО, гіршає ТОЧНІСТЬ вимірювання часів При оптимальному виборі k та m координати будуть визначені з точністю (ДХ, AY)«R Так, якщо точність визначення кутових координат об'єкта (від ЯКИХ можна легко перейти до декартових) азимута ср+6, кута місця р+6, визначається шириною діаграми спрямованості Є, то при використанні даного методу погрішність виражається як бэфф-лб. Д е Л < в : 1 ' є функцією що не виражається аналітично Ця функція залежить від рознесення ДС, точності вимірювання тривалості сигналу і розраховується за формою ДС На фіг 6 показаний приклад результату розрахунку траєкторій за експериментальними даними, отриманим на спеціальному стенді (див Никитин О Ю, Соро ФІГ.1 визначення орієнтаційних характеристик космічних об'єктів Збірник трудів 5-й Міжнародної конференції "Системний аналіз і управління космічними комплексами Дослідження і освоєння космосу в наступаючому ВІЦІ" Євпаторія, 2000 - С 32) Граничні траєкторії відповідають помилкам у визначенні часу 0,1%, (k/R, m/R)=0,3 Видно, що погрішність вимірювання координат меншає в 100 раз в порівнянні з вимірюваннями звичайною антеною Наприклад, при реєстрації луни-сигналу дисковою антеною з діаметром 100 метрів (Боннский радіотелескоп), на довжині хвилі 5 см погрішність становила ±1,8 кутових хвилини, при використанні даної методики вона становитиме 0,2 кутових секунди Іншими словами, при заданій точності вимірювання застосування даного способу дозволяє використати антени менших розмірів, що особливо важливо дня бортової апаратури в аерокосмічних застосуваннях Оскільки, звичайно, фокальна пляма антенних систем істотно перевищує розміри апертури випромінювача, установка трьох каналів збільшує чутливість радіолокаційного методу У оптичному діапазоні складність обробки сигналів ПЗЗ матриць, що представляють фактично багатоканальну приймальну систему, не дозволяє здійснювати реєстрацію рухомих об'єктів в режимі реального часу Використання даного способу в оптичному діапазоні дозволяє визначати координати об'єктів по вимірюваннях в областях спектра, для яких відсутні приймачі з позиціонуванням - УК, далекий ИЧ і рентгенівский При обстеженні об'єкта, випромінюючого в радіодіапазоні, прийом сигналів ведуть на частоті, ВІДПОВІДНІЙ максимуму його випромінювання, так що відпадає необхідність використання зондувального імпульсу 42195 Фіг.2 Фіг.З Фіг.4 Фіг.5 Фіг.6 42195 ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку Обсяг обл -вид арк 2002 р Формат 60x84 1/8 Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of precision coordinate and velocity vector measurement of a reflective object
Автори англійськоюVlasenko Volodymyr Petrovych, Sorokin Oleksandr Fedorovych
Назва патенту російськоюСпособ прецизионного измерения координат и вектора скорости отражающего объекта
Автори російськоюВласенко Владимир Петрович, Сорокин Александр Фёдорович
МПК / Мітки
МПК: H01G 13/00, H01G 15/00
Мітки: об'єкта, виміру, відбиває, швидкості, спосіб, прецизійного, координат, вектора
Код посилання
<a href="https://ua.patents.su/5-42195-sposib-precizijjnogo-vimiru-koordinat-i-vektora-shvidkosti-obehkta-shho-vidbivaeh.html" target="_blank" rel="follow" title="База патентів України">Спосіб прецизійного виміру координат і вектора швидкості об’єкта, що відбиває</a>
Пристрій для виміру середньої швидкості потоку
Номер патенту: 33606
Опубліковано: 15.02.2001
Автори: Верховецький Миколай Олексійович, Мінін Сергій Олександрович, Ковріжкін Юрій Леонідович, Лисцов Сергій Олегович, Соколов Володимир Ілліч, Коваленко Алім Олексійович
МПК: G01P 5/00
Мітки: пристрій, швидкості, потоку, середньої, виміру
Текст:
...9. Тому показання дифманометра 14 враховують нерівномірність розподілу швидкості в потоці і максимально відповідають середньому швидкісному напору потоку. Отже, визначення по показаннях дифманометра 14 середньої швидкості потоку здійснюється з більш високою точністю. Фіг. 1 Фіг. 2 2 33606 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133,...
Спосіб формування газової опори прецизійного пристрою і опора прецизійного пристрою, яка його реалізує
Номер патенту: 4169
Опубліковано: 27.12.1994
Автори: Ярошенко Вячеслав Андрійович, Петренко Сергій Федорович
МПК: G01B 17/00, G01D 11/00
Мітки: опора, яка, газової, спосіб, пристрою, опори, реалізує, формування, прецизійного
Формула / Реферат:
1. Способ формирования газовой опоры прецизионного прибора, заключающийся в возбуждении ультразвуковых вторичных резонансных колебаний в одном из элементов опоры и формировании газовой пленки повышенного давления между аналогичными по форме сопряженными поверхностями подпятника и цапфы опоры, отличающийся тем, что сопряженные аналогичные по форме поверхности подпятника и цапфы опоры устанавливают под углом одна к другой с получением...
Спосіб виміру швидкості звуку і пристрій для його виконання
Номер патенту: 14170
Опубліковано: 25.04.1997
Автори: Бабій Владлен Іванович, Бабій Маргарита Василівна
МПК: G01H 9/00, G01F 1/66, G01N 29/07, G01H 5/00
Мітки: спосіб, виміру, швидкості, звуку, пристрій, виконання
Формула / Реферат:
1. Способ измерения скорости звука, заключающийся в том, что излучают акустические импульсы в исследуемую среду и регистрируют время прохождения ими заданного расстояния, по которому определяют скорость звука, отличающийся тем, что, с целью повышения точности, регистрацию времени прохождения акустических импульсов осуществляют по моментам изменения фазы световой волны сфокусированного когерентного излучения, перпендикулярного направлению...
Спосіб виміру швидкості звуку і пристрій для його виконання
Номер патенту: 16018
Опубліковано: 29.08.1997
Автор: Бабій Владлен Іванович
МПК: G01N 29/07, G01H 5/00, G01F 1/66
Мітки: виміру, звуку, виконання, швидкості, спосіб, пристрій
Формула / Реферат:
1. Способ измерения скорости звука, заключающийся в том, что в контролируемую среду излучают импульс акустических колебаний, принимают отраженный сигнал, измеряют время его прихода, по которому с учетом величины базы измерений определяют искомый параметр, отличающийся тем, что, с целью повышения точности и разрешающей способности, при излучении и отражении формируют сходящиеся волновые фронты, центры кривизны которых расположены на базе...
Спосіб виміру параметрів швидкості течії і пристрій для його виконання
Номер патенту: 16827
Опубліковано: 29.08.1997
Автори: Холкін Володимир Васильович, Толстошеев Олексій Петрович, Даниленко Михайло Якович
МПК: G01P 5/00
Мітки: виконання, виміру, пристрій, течії, швидкості, спосіб, параметрів
Формула / Реферат:
1. Способ измерения параметров скорости течения, заключающийся в приеме сигналов от вращающегося элемента, преобразовании этих сигналов в последовательность электрических импульсов и регистрации их очередности, отличающийся тем, что, с целью повышения точности измерения, вращающийся элемент последовательно облучают как минимум тремя акустическими импульсами, принимают отраженные акустические сигналы, при этом направление течения...
Попередній патент: Спосіб введення лікарських препаратів, зосереджених в еритроцитарних контейнерах
Наступний патент: Спосіб очищення цитохрому р450 ароматази
Випадковий патент: Спосіб ушкодження термонетолерантних патологічних біоструктур організму теплокровних