Спосіб виконання промірних робіт
Номер патенту: 82812
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Слабак Сергій Ігорович, Мамонтова Людмила Степанівна
Формула / Реферат
Спосіб виконання промірних робіт, що заснований на комбінуванні диференційного методу GPS-визначення координат з методом ехолотування і методом радіокерування, який відрізняється тим, що дистанційно з центральної станції по радіоканалу керують безпілотним промірним судном (ПС), задають для кожного ПС галси проміру у вигляді ланцюга координат заданих промірних точок, на ПС прогнозують курс і уточнюють його за показниками бортового приймача GPS, направляють по радіоканалу на центральну станцію поточні координати ПС і значення виміряних глибин водоймища і за цими даними на центральній станції формують план з рельєфом дна водоймища, а також контролюють положення ПС на галсах.
Текст
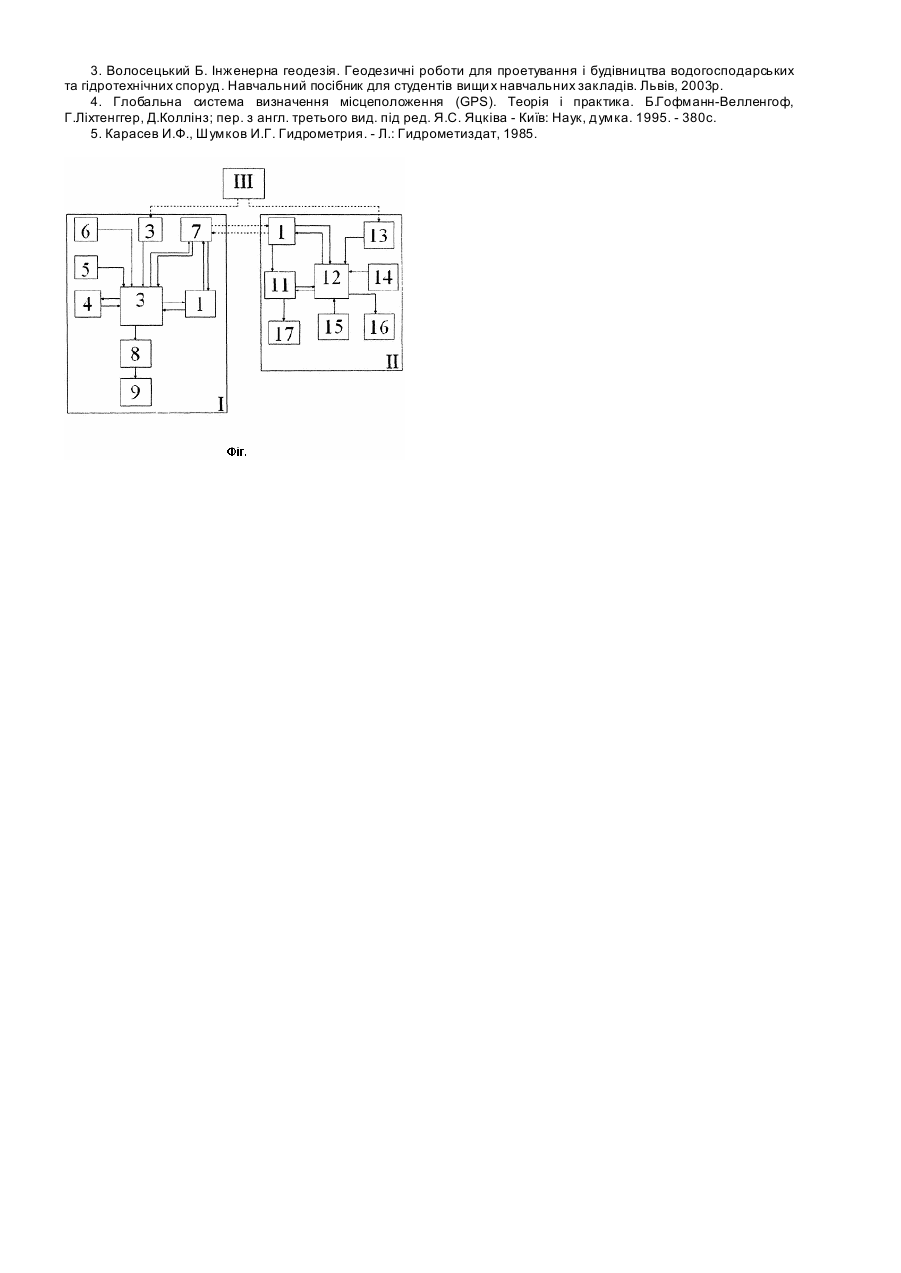
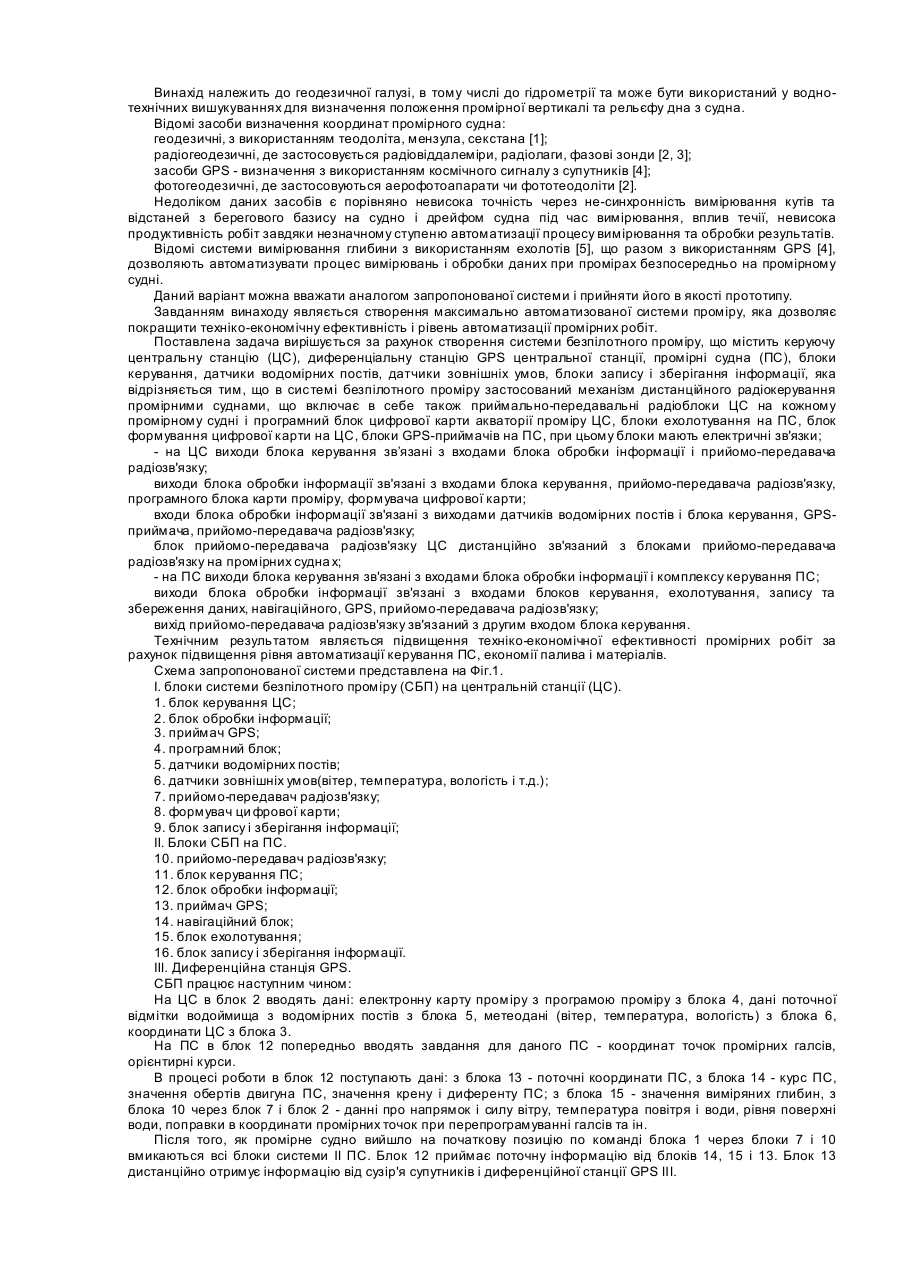
Винахід належить до геодезії, в тому числі до гідрометрії та може бути використаний у водно-те хнічних вишукуваннях для визначення положення промірної вертикалі та рельєфу дна з судна. Відомі способи визначення координат промірного судна:. - геодезичний , з використанням теодоліта, мензула, секстана [1]; - радіогеодезичний, де застосовується радіовіддалеміри, радіолаги, фазові зонди [2, 3]; - GPS - визначення з використанням космічного сигналу з суп утників [4]; Фотогеодезичний, де застосовуються аерофотоапарати чи фототеодоліти [2]. Недоліком даних методів є порівняно невисока точність через не синхронність вимірювання кутів та відстаней з берегового базису на судно і дрейфом судна під час вимірювання, вплив течії, невисока продуктивність робіт завдяки незначному ступеню автоматизації процесу вимірювання та обробки результатів. Відомі методи вимірювання глибини з використанням ехолотів [5], що разом з використанням GPS [4], дозволяє автоматизувати процес вимірювань і обробки даних при промірах безпосередньо на промірному судні. Даний варіант можна вважати аналогом запропонованого способу і прийняти його в якості прототипу. Завданням винаходу являється створення максимально автоматизованого способу проміру, який дозволяє покращити техніко-економічну ефективність і рівень автоматизації промірних робіт. Поставлена задача вирішується за рахунок створення способу виконання промірних робіт, що заснований на комбінуванні диференційного методу GPS- визначення координат методом ехолотування і методом радіокерування, який відрізняється тим, що дистанційно з центральної станції по радіоканалу керують безпілотним промірним судном (ПС), задають для кожного ПС галси проміру у вигляді ланцюга координат заданих промірних точок; на ПС прогнозують курс і уточнюють його за показниками бортового приймача GPS, повідомляють по радіоканалу на центральну станцію поточні координати ПС і значення виміряних глибин водоймища; по цих даних на центральній станції формують план з рельєфом дна водоймища, а також контролюють положення ПС на галсах. Технічним результатом являється підвищення техніко-економічної ефективності промірних робіт за рахунок підвищення рівня автоматизації керування ПС, економії палива і матеріалів. Запропонований спосіб реалізується системою безпілотного проміру, схема якого представлена на Фіг. I. блоки системи безпілотного проміру (СБП) на центральній станції (ЦС). 1. блок керування ЦС; 2. блок обробки інформації; 3. приймач GPS; 4. програмний блок; 5. датчики водомірних постів; 6. датчики зовнішніх умов (вітер, температура, вологість і т.д.); 7. приймач-передавач радіозв'язку; 8. формувач ци фрової карти; 9. блок запису і зберігання інформації; II. Блоки СБП на ПС. 10. приймач-передавач радіозв'язку; 11. блок керування ПС; 12. блок обробки інформації; 13. приймач GPS; 14. навігаційний блок; 15. блок ехолотування; 16. блок запису і зберігання даних. III. Диференційна станція GPS. СБП працює наступним чином: На ЦС в блок 2 вводять дані: електронну карту проміру з програмою проміру з блока 4, дані поточної відмітки водоймища з водомірних постів з блока 5, метеодані (вітер, температура, вологість) з блока 6, координати ЦС з блока 3. На ПС в блок 12 попередньо вводять завдання для даного ПС - координат точок промірних галсів, орієнтирні курси. В процесі роботи в блок 12 поступають дані: з блока 13 - поточні координати ПС, з блока 14 - курс ПС, значення обертів двигуна ПС, значення крену і диференту ПС; з блока 15 - значення виміряних глибин, з блока 10 через блок 7 і блок 2 - данні про напрямок і силу вітру, температура повітря і води, рівня поверхні води, поправки в координати промірних точок при перепрограмуванні галсів та ін. Після того, як промірне судно вийшло на початкову позицію по команді блока 1 через блоки 7 і 10 вмикаються всі блоки системи II ПС. Блок 12 приймає поточну інформацію від блоків 14, 15 і 13. блок 13 дистанційно отримує інформацію від сузір'я супутників і диференційної станції GPS III. В результаті обробки отриманої інформації в блоці 12 визначають шлях ПС і прогнозують курс ПС, який через блок 11 передають в блок 17 для виконання. Дані про місцезнаходження судна і проміряні глибини із блока 12 через блоки 10 і 7 передають в блок 2, дані про команди блока 11 переданих в блок 12 і 17, і їх виконання повідомляють в блок 1. По описаній схемі роботи всі дані про місцезнаходження безпілотних ПС і виміряні глибини в промірних точках передаються в блок 2, в якому виконують завершальну обробку даних, прирівнюють координати і глибини, оцінку точності і т. д. і передають результати в блок 8, який формує цифрову карту з рельєфом дна промірної ділянки водоймища на основі геодезичної опорної сітки, інформацію про яку вводять з блока 4 за вимогою блока 2. Отримана цифрова карта (план) надходить з блока 8 в блок 9 для запису і зберігання. Таким чином, запропонований спосіб дозволяє підвищити рівень автоматизації промірних робіт, скоротити витрати пального, матеріалів та ін. і за рахунок цього отримати суттєвий техніко-економічний ефект. Джерела інформації 1. Ворковастов К.С., Агеев М.Ф., Маркшейдерские экваториальные работы. - М.: Недра, 1986г. 2. Васильев А.В., Шмидт С.В., Водно-технические изыскания. - Л.: Гидрометиздат, 1970г. 3. Волосецький Б. Інженерна геодезія. Геодезичні роботи для проетування і будівництва водогосподарських та гідротехнічних споруд. Навчальний посібник для студентів вищи х навчальних закладів. Львів, 2003р. 4. Глобальна система визначення місцеположення (GPS). Теорія і практика. Б.Гофманн-Велленгоф, Г.Ліхтенггер, Д.Коллінз; пер. з англ. третього вид. під ред. Я.С. Яцківа - Київ: Наук, думка. 1995. - 380с. 5. Карасев И.Ф., Шумков И.Г. Гидрометрия. - Л.: Гидрометиздат, 1985.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for implementation of survey measuring
Автори англійськоюBurachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Slabak Serhii Ihorovych
Назва патенту російськоюСпособ выполнения промерных работ
Автори російськоюБурачек Вселовод Германович, Мамонтова Людмила Степановна, Слабак Сергей Игоревич
МПК / Мітки
МПК: G01S 15/00, G01C 11/00
Мітки: робіт, виконання, спосіб, промірних
Код посилання
<a href="https://ua.patents.su/2-82812-sposib-vikonannya-promirnikh-robit.html" target="_blank" rel="follow" title="База патентів України">Спосіб виконання промірних робіт</a>
Спосіб виконання промірних робіт
Номер патенту: 28408
Опубліковано: 10.12.2007
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Слабак Сергій Ігорович
МПК: G01C 11/00
Мітки: спосіб, виконання, робіт, промірних
Формула / Реферат:
Спосіб виконання промірних робіт, що заснований на комбінуванні диференційного методу GPS-визначення координат з методом ехолотування і методом радіокерування, який відрізняється тим, що дистанційно з центральної станції по радіоканалу керують безпілотним промірним судном (ПС), задають для кожного ПС галси проміру у вигляді ланцюга координат заданих промірних точок; на ПС прогнозують курс і уточнюють його по показниках бортового приймача GPS,...
Система безпілотного проміру
Номер патенту: 28776
Опубліковано: 25.12.2007
Автори: Мамонтова Людмила Степанівна, Слабак Сергій Ігорович, Бурачек Всеволод Германович
МПК: G01C 11/00, G01S 15/00
Мітки: проміру, безпілотного, система
Формула / Реферат:
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, що включає в себе приймально-передавальні радіоблоки ЦС і на кожному...
Система безпілотного проміру
Номер патенту: 82811
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Слабак Сергій Ігорович
МПК: G01C 11/00, G01S 15/00
Мітки: безпілотного, проміру, система
Формула / Реферат:
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, а також система включає приймально-передавальні радіоблоки ЦС на...
Система керування двокоординатним пристроєм для виконання графічних робіт
Номер патенту: 25482
Опубліковано: 10.08.2007
Автори: Джулгаков Віталій Георгійович, Власенко Оксана Іванівна, Водяницький Станіслав Олегович, Руденко Кирило Ігорович
МПК: G05D 19/00
Мітки: робіт, пристроєм, система, двокоординатним, виконання, графічних, керування
Формула / Реферат:
Система керування двокоординатним пристроєм для виконання графічних робіт, що містить обчислювальний пристрій, блок оптронних ключів і послідовно сполучені блок підсилювачів крокового приводу, крокові двигуни і механізм переміщення, яка відрізняється тим, що в неї введені персональна електронно-обчислювальна машина, вихід якої, за допомогою інтерфейсу, сполучений з входом мікропроцесорного блока, що складається з двох мікроконтролерів,...
Спосіб виконання буровибухових робіт
Номер патенту: 29983
Опубліковано: 15.08.2002
Автори: Коростельов Максим Миколайович, Кострюков Станіслав Андрійович, Шевченко Сергій Васильович, Мясніков Федір Іванович, Півень Володимир Олександрович, Мельник Юрій Іванович, Шапурін Олександр Васильович, Кривошеєв Олександр Васильович
Мітки: спосіб, виконання, робіт, буровибухових
Формула / Реферат:
Спосіб виконання буровибухових робіт, який включає буріння вибухових свердловин на виступі, їх заряджання, забивку, монтаж вибухової мережі і підривання, який відрізняється тим, що поміж свердловин оконтурювального ряду вибурюють додатково скорочені свердловини на 1/3 висоти уступу, а в процесі заряджання в глибоких свердловинах оконтурювального ряду формують заряди масою 0,3-0,35 від маси зарядів розпушування, тоді як в скорочених відповідно...
Попередній патент: Система безпілотного проміру
Наступний патент: Пристрій для дешифрування спектральних характеристик об`єкта
Випадковий патент: Склад для отримання композиційних електролітичних покриттів на основі металів групи заліза