Система безпілотного проміру
Номер патенту: 28776
Опубліковано: 25.12.2007
Автори: Слабак Сергій Ігорович, Мамонтова Людмила Степанівна, Бурачек Всеволод Германович
Формула / Реферат
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, що включає в себе приймально-передавальні радіоблоки ЦС і на кожному промірному судні програмний блок цифрової карти акваторії проміру ЦС, блоки ехолотування на ПС, блок формування цифрової карти на ЦС, блоки GPS-приймачів на ПС, при цьому на ЦС виходи блока керування зв'язані з входами блока обробки інформації і приймача-передавача радіозв'язку, виходи блока обробки інформації зв'язані з входами блока керування, приймача-передавача радіозв'язку, програмного блока карти проміру, формувача цифрової карти, входи блока обробки інформації зв'язані з виходами датчиків водомірних постів і блока керування, виходами GPS-приймача і приймача-передавача радіозв'язку, блок приймача-передавача радіозв'язку ЦС дистанційно зв'язаний з блоками приймача-передавача радіозв'язку на промірних суднах, на ПС виходи блока керування зв'язані з входами блока обробки інформації і комплексу керування ПС, виходи блока обробки інформації зв'язані з входами блоків керування, ехолотування, запису та збереження даних, навігаційного, GPS, приймача-передавача радіозв'язку, вихід приймача-передавача радіозв'язку зв'язаний з другим входом блока керування.
Текст
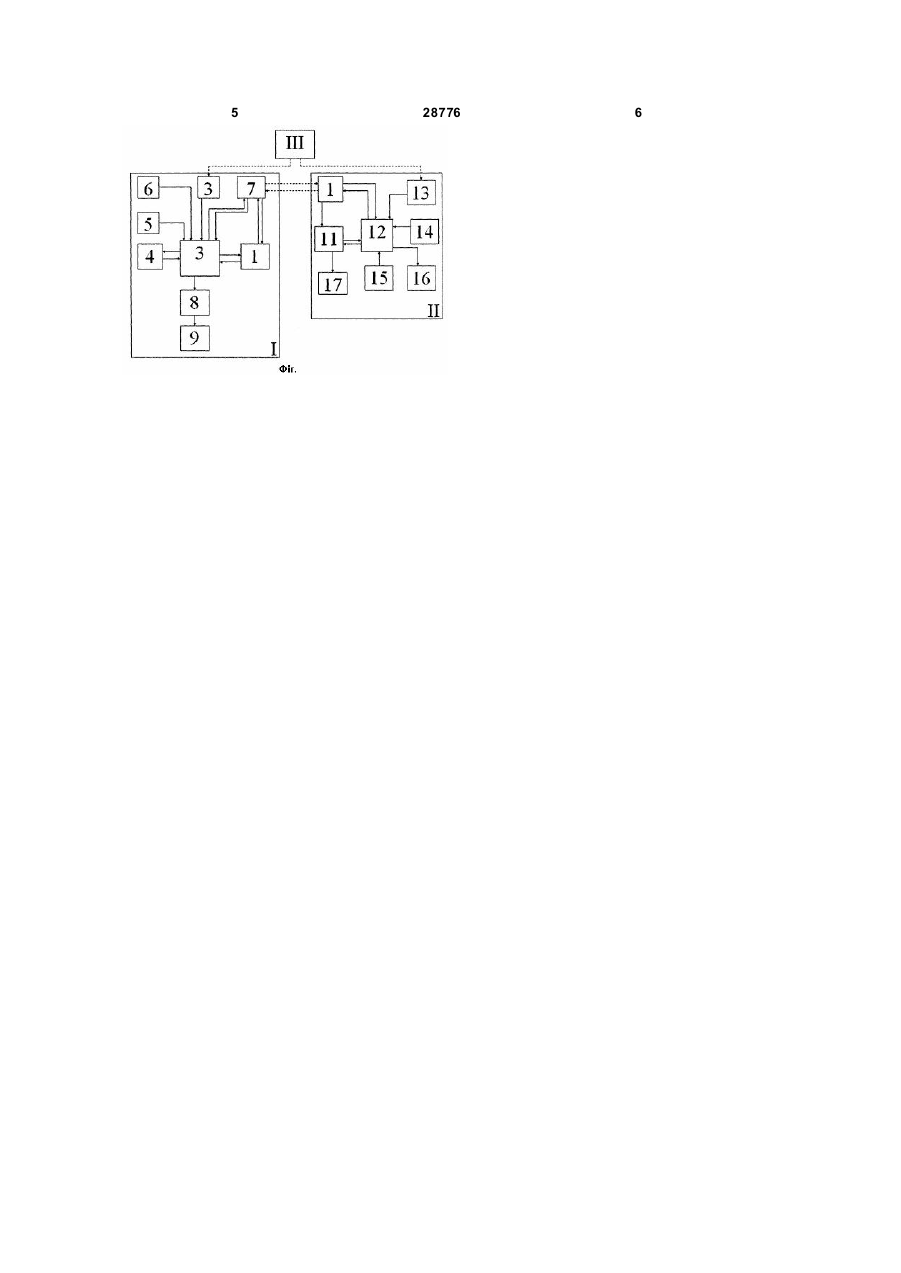
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, що включає в себе приймально-передавальні радіоблоки ЦС і на кожному промірному судні програмний блок цифрової карти акваторії проміру ЦС, блоки ехолотування на ПС, блок формування цифрової U 2 (19) 1 3 28776 4 водомірних постів, датчики зовнішніх умов, блоки блока 5, метеодані (вітер, температура, вологість) запису і зберігання інформації, яка відрізняється з блока 6, координати ЦС з блока 3. тим, що в системі безпілотного проміру На ПС в блок 12 попередньо вводять завдання застосований механізм дистанційного для даного ПС - координат точок промірних галсів, радіокерування промірними суднами, що включає орієнтирні курси. в себе також прийомо-передаючі радіоблоки ЦС і В процесі роботи в блок 12 поступають дані: з на кожному промірному судні і програмний блок блока 13 - поточні координати ПС, з блока 14 цифрової карти акваторії проміру ЦС, блоки курс ПС, значення обертів двигуна ПС, значення ехолотування на ПС, блок формування цифрової крену і диференту ПС; з блока 15 - значення карти на ЦС, блоки GPS- приймачів на ПС, при виміряних глибин, з блока 10 через блок 7 і блок 2 цьому блоки мають електричні зв'язки; - данні про напрямок і силу вітр у, температуру - на ЦС виходи блока керування зв'язані з повітря і води, рівня поверхні води, поправки в входами блока обробки інформації і прийомокоординати промірних точок при передавача радіозв'язку; перепрограмуванні галсів та ін. виходи блока обробки інформації зв'язані з Після того, як промірне судно вийшло на входами блока керування, прийомо-передавача початкову позицію по команді блока 1 через блоки радіозв'язку, програмного блока карти проміру, 7 і 10 вмикаються всі блоки системи П ПС. Блок 12 формувача цифрової карти; приймає поточну інформацію від блоків 14, 15 і 13. входи блока обробки інформації зв'язані з блок 13 дистанційно отримує інформацію від виходами датчиків водомірних постів і блока сузір'я супутників і диференційної станції GPS III. керування, GPS - приймача, прийомо-передавача В результаті обробки отриманої інформації в радіозв'язку; блоці 12 визначають шлях ПС і прогнозують курс блок прийомо-передавача радіозв'язку ЦС ПС, який через блок 11 передають в блок 17 для дистанційно зв'язаний з блоками прийомовиконання. передавача радіозв'язку на промірних суднах; Дані про місцезнаходження судна і проміряні - на ПС виходи блока керування зв'язані з глибини із блока 12 через блоки 10 і 7 передають в входами блока обробки інформації і комплексу блок 2. дані про команди блока 11 переданих в керування ПС; блок 12 і 17, і їх виконання повідомляють в блок 1. виходи блока обробки інформації зв'язані з По описаній схемі роботи всі дані про входами блоков керування, ехолотування, запису місцезнаходження безпілотних ПС і виміряні та збереження даних, навігаційного, GPS, глибини в промірних точках передаються в блок 2, прийомо-передавача радіозв'язку; в якому виконують завершальну обробку даних, вихід прийомо-передавача радіозв'язку прирівнюють координати і глибини, оцінку точності зв'язаний з другим входом блока керування. і т. д. і передають результати в блок 8, який Технічним результатом являється підвищення формує ци фрову карту з рельєфом дна промірної техніко-економічної ефективності промірних робіт ділянки водоймища на основі геодезичної опорної за рахунок підвищення рівня автоматизації сітки, інформацію про яку вводять з блока 4 за керування ПС, економії палива і матеріалів. вимогою блока 2. отримана цифрова карта (план) Схема запропонованої системи представлена надходить з блока 8 в блок 9 для запису і на фіг. зберігання. І. блоки системи безпілотного проміру (СБП) Таким чином, запропонована система на центральній станції (ЦС). дозволяє підвищити рівень автоматизації 1. блок керування ЦС; промірних робіт, скоротити витрати пального, 2. блок обробки інформації; матеріалів та ін. і за рахунок цього отримати 3. приймач GPS; суттєвий техніко-економічний ефект. 4. програмний блок; Джерела інформації: 5. датчики водомірних постів; 1. Ворковастов К.С., Агеев М.Ф., 6. датчики зовнішніх умов(вітер, температура, Маркшейдерские экваториальные работы. -М.: вологість і т.д.); Недра, 1986 г. 7. прийомо-передавач радіозв'язку; 2. Васильев А.В., Шмидт С.В., Водно8. формувач ци фрової карти; технические изыскания. - Л.: Гидрометиздат, 1970 9. блок запису і зберігання інформації; г. ІІ. Блоки СБП на ПС. 3. Волосецький Б. Інженерна геодезія. 10. прийомо-передавач радіозв'язку; Геодезичні роботи для проектування і будівництва 11. блок керування ПС; водогосподарських та гідротехнічних споруд. 12. блок обробки інформації; Навчальний посібник для студентів ви щих 13. приймач GPS; навчальних закладів. Львів, 2003р. 14. навігаційний блок; 4. Глобальна система визначення 15. блок ехолотування; місцеположення (GPS). Теорія і практика. Б. 16. блок запису і зберігання інформації. Гофманн-Велленгоф, Г. Ліхтенггер, Д.Коллінз; пер. III. Диференційна станція GPS. з англ. третього вид. під ред. Я.С. Яцківа-Київ: СБП працює наступним чином: Наук. думка. 1995.-380с. На ЦС в блок 2 вводять дані: електронну карту 5. Карасев И.Ф., Шумков И.Г. Гидрометрия.-Л.: проміру з програмою проміру з блока 4, дані Гидрометиздат, 1985. поточної відмітки водоймища з водомірних постів з 5 28776 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measuring depths of water-storage reservoir
Автори англійськоюBurachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Slabak Serhii Ihorovych
Назва патенту російськоюСистема промера глубин водохранилища
Автори російськоюБурачек Вселовод Германович, Мамонтова Людмила Степановна, Слабак Сергей Игоревич
МПК / Мітки
МПК: G01C 11/00, G01S 15/00
Мітки: безпілотного, проміру, система
Код посилання
<a href="https://ua.patents.su/3-28776-sistema-bezpilotnogo-promiru.html" target="_blank" rel="follow" title="База патентів України">Система безпілотного проміру</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, літального, система, безпілотного, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Спосіб прогнозу величини проміру висоти в холці (вх) дорослих коней російської рисистої породи
Номер патенту: 49522
Опубліковано: 16.09.2002
Автор: Пащенко Наталія Петрівна
МПК: A01K 29/00
Мітки: висоті, російської, спосіб, дорослих, коней, рисистої, вх, прогнозу, величини, породи, холці, проміру
Формула / Реферат:
Спосіб прогнозу величини проміру висоти в холці (ВХ) дорослих коней російської рисистої породи, що ґрунтується на використанні багатовимірних регресійних рівнянь, з урахуванням промірів висоти в холц величину проміру висоти в холці (ВХ) дорослих коней російської рисистої породи обчислюють за формулою:ВХ=30,66+0,90´ВХ(2)-0,07´ОГ(2) - для коней двох років, де: ВХ - висота в холці дорослого коня;ВХ(2) - висота в...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Бандура Іван Миколайович, Симонов Володимир Федорович, Антошик Вікторія Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, безпілотного, літального, апарата, система
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб прогнозування величини проміру обхвату грудей (ог) дорослих коней російської рисистої породи
Номер патенту: 55011
Опубліковано: 17.03.2003
Автори: Патика Володимир Пилипович, Вінничук Дмитро Тимофійович, Пащенко Наталія Петрівна
МПК: A01K 67/00
Мітки: рисистої, коней, ог, величини, проміру, обхвату, спосіб, породи, прогнозування, російської, грудей, дорослих
Формула / Реферат:
Спосіб прогнозування величини проміру обхвату грудей (ОГ) дорослих коней російської рисистої породи, що ґрунтується на використанні проміру обхвату грудей (ОГ) у віці 3-х років, який відрізняється тим, що додатково роблять проміри висоти в холці (ВХ), довжини тулуба (ДТ) та обхвату грудей (ОГ) коней у віці 2-х років, а прогнозовану величину проміру ОГ у дорослих коней обчислюють за формулою:
Спосіб виконання промірних робіт
Номер патенту: 28408
Опубліковано: 10.12.2007
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Слабак Сергій Ігорович
МПК: G01C 11/00
Мітки: виконання, спосіб, промірних, робіт
Формула / Реферат:
Спосіб виконання промірних робіт, що заснований на комбінуванні диференційного методу GPS-визначення координат з методом ехолотування і методом радіокерування, який відрізняється тим, що дистанційно з центральної станції по радіоканалу керують безпілотним промірним судном (ПС), задають для кожного ПС галси проміру у вигляді ланцюга координат заданих промірних точок; на ПС прогнозують курс і уточнюють його по показниках бортового приймача GPS,...
Попередній патент: Масажний обруч
Наступний патент: Спосіб виробництва гліцерину дистильованого
Випадковий патент: Спосіб кодування та розпізнавання неконфіденційної інформації за допомогою двомірного штрихового коду