Спосіб попереднього дроблення агломерату
Номер патенту: 9901
Опубліковано: 17.10.2005
Автори: Алтухов В'ячеслав Миколайович, Левченко Оксана Олександрівна
Формула / Реферат
Спосіб попереднього дроблення агломерату, що включає дію ламких зусиль від обертового робочого органа, який відрізняється тим, що додатково накладають розколювальні зусилля на глибину:
![]()
де:
![]() - діаметр робочого органа,
- діаметр робочого органа,
а дію розколювальних зусиль від мінімальних до максимальних визначають центральним кутом кругового сектора робочого органа за залежністю:
![]()
де:
![]() - швидкість руху агломерату;
- швидкість руху агломерату;
![]() - частота обертання робочого органа.
- частота обертання робочого органа.
Текст
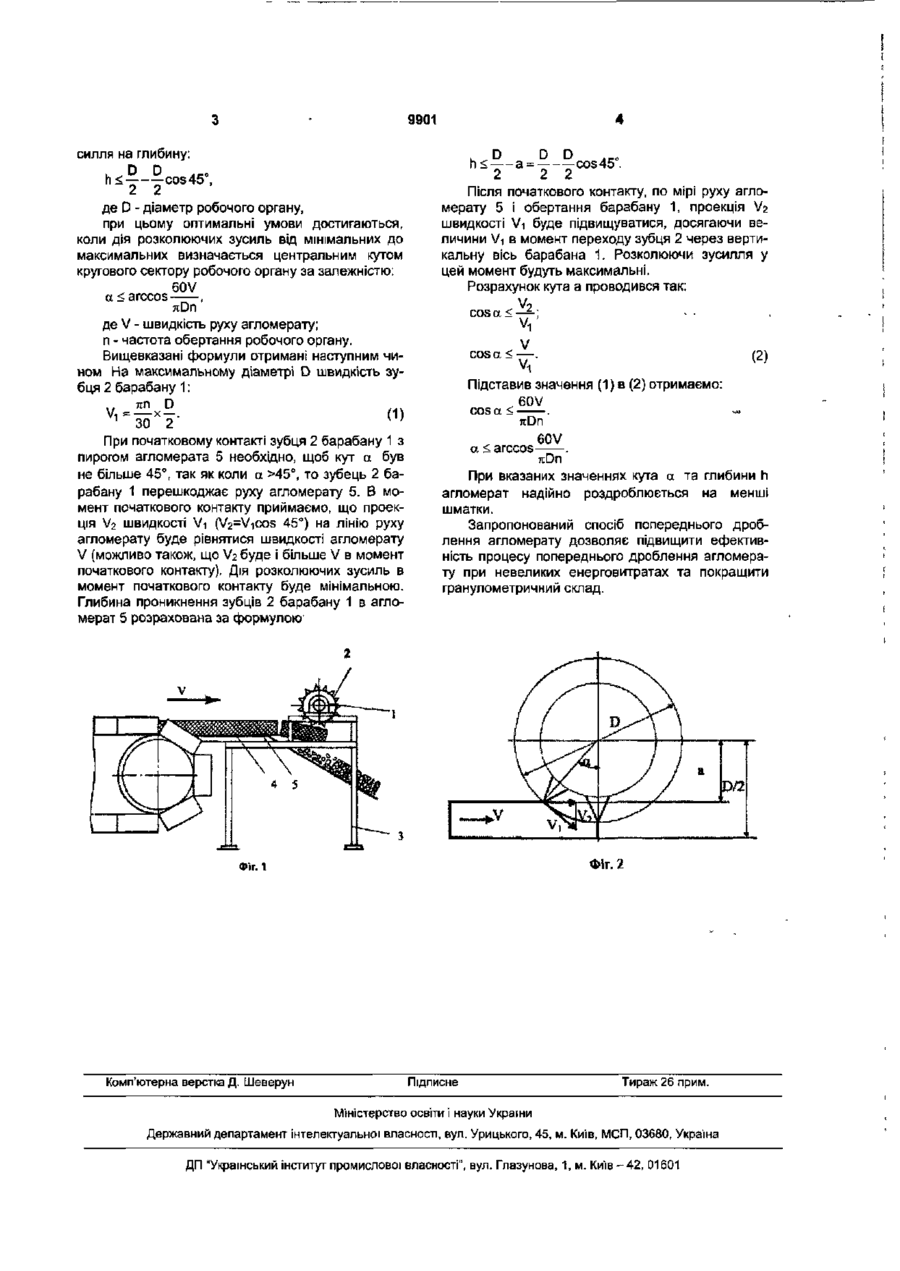
Спосіб попереднього дроблення агломерату, що включає дію ламких зусиль від обертового робочого органа, який відрізняється тим, що додатково накладають розколювальні зусилля на глибину: Корисна модель відноситься до металургійної промисловості та може бути використаний при попередньому дробленні агломерату. Відомий спосіб попереднього дроблення агломерату шляхом дії ламаючих зусиль від обертаючогося робочого органу [А.С. СССР №670323, В02С11/02]. Недоліком відомого способу є низька ефективність попереднього дроблення в зв'язку з тим, що робочий орган отримує обертання від агломерату, що рухається, а руйнування відбувається шляхом злому. Технічним завданням корисної' моделі є удосконалення способу попереднього дроблення агломерату, в якому завдяки дії додаткових розколюваючих зусиль на задану глибину, зростаючих від мінімальних до максимальних, відбувається ефективне руйнування агломерату на менші шматки. Поставлене завдання досягається тим, що у способі для попереднього дроблення агломерату шляхом дії ламаючих зусиль від обертаючогося робочого органу, згідно з винаходом, додатково накладають розколюючи зусилля на глибину: h < — -—cos45°, 2 2 де D - діаметр робочого органу, h< — -—cos 45°, 2 2 Дё1 D - діаметр робочого органа, а дію розколювальних зусиль від мінімальних до максимальних визначають центральним кутом кругового сектора робочого органа за залежністю1 60V а < arccos Де: V - швидкість руху агломерату; п - частота обертання робочого органа. а дія розколюючих зусиль від мінімальних до максимальних визначається центральним кутом кругового сектору робочого органу за залежністю: 60V а < arccos де V - швидкість руху агломерату; п - частота обертання робочого органу. На Фіг.1 показано пристрій для реалізації способу попереднього дроблення агломерату; на Фіг.2 - схема для розрахунку параметрів способу Пристрій містить робочий орган у вигляді барабану 1 з зубцями 2, закріплений на рамі 3, направляючий лоток 4 для руху агломерату 5. Суть способу у наступному Агломерат 5 із спікальних візків подається по направляючому лотку 4 і поступає під дію зубців 2 барабана 1, де захватується зубцями 2 та підлягає дії ламаючих та розколюючих зусиль В момент початкового контакту розколюючи зусилля - мінімальні, при подальшому обертанні барабану розколюючи дії збільшуються і досягають максимуму в момент переходу зубцем вертикальної вісі барабану. Для того, щоб гарантувати ефективне розламування великих шматків на менші, додатково до дії ламаючих зусиль від обертаючогося робочого органу (барабану), накладають розколюючи зу О) О) 9901 силля на глибину: hu ——cos 2 2 D 45°, де D - діаметр робочого органу, при цьому оптимальні умови достигаються, коли дія розколюючих зусиль від мінімальних до максимальних визначається центральним кутом кругового сектору робочого органу за залежністю: 60V а < arccos , nDn де V - швидкість руху агломерату; п - частота обертання робочого органу. Вищевказані формули отримані наступним чином На максимальному діаметрі D швидкість зубця 2 барабану 1: D D ^ h< — a = cos45 . 2 2 2 Після початкового контакту, по мірі руху агломерату 5 і обертання барабану 1, проекція У г швидкості Vi буде підвищуватися, досягаючи величини Vi в момент переходу зубця 2 через вертикальну вісь барабана 1. Розколюючи зусилля у цей момент будуть максимальні. Розрахунок кута а проводився так: cos a < V 2 . Vi cos а < — . V, Підставив значення (1) в (2) отримаємо: 60V cos a 45°, то зубець 2 барабану 1 перешкоджає руху агломерату 5. В момент початкового контакту приймаємо, що проекція V2 швидкості Vt (V2=ViCOS 45°) на лінію руху агломерату буде рівнятися швидкості агломерату V (можливо також, що V2 буде і більше V в момент початкового контакту). Дія розколюючих зусиль в момент початкового контакту буде мінімальною. Глибина проникнення зубців 2 барабану 1 в агломерат 5 розрахована за формулою1 60V а < arccos • TtDn При вказаних значеннях кута а та глибини h агломерат надійно роздроблюється на менші шматки. Запропонований спосіб попереднього дроблення агломерату дозволяє підвищити ефективність процесу попереднього дроблення агломерату при невеликих енерговитратах та покращити гранулометричний склад. Фіг. 2 Фіг. 1 Комп'ютерна верстка Д. Шеверун Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of preliminary crushing of agglomerate
Автори англійськоюAltukhov Viacheslav Mykolaiovych, Levchenko Oksana Oleksandrivna
Назва патенту російськоюСпособ предварительного дробления агломерата
Автори російськоюАлтухов Вячеслав Николаевич, Левченко Оксана Александровна
МПК / Мітки
МПК: B02C 11/00
Мітки: попереднього, агломерату, дроблення, спосіб
Код посилання
<a href="https://ua.patents.su/2-9901-sposib-poperednogo-droblennya-aglomeratu.html" target="_blank" rel="follow" title="База патентів України">Спосіб попереднього дроблення агломерату</a>
Машина вибіркового дроблення

Номер патенту: 41711
Опубліковано: 15.03.2004
Автори: Волошин Григорій Мусійович, Талаш Олександр Петрович, Волошин Анатолій Григорович, Томурко Олександр Андрійович
МПК: B02C 4/02, B02C 4/30, B02C 4/28
Мітки: машина, дроблення, вибіркового
Формула / Реферат:
1. Машина вибіркового дроблення, що містить виконавчі органи з похилою камерою дроблення між ними, живильник, при цьому кут захвату камери дроблення є проміжним між подвійними кутами тертя розділюваних матеріалів, а розвантажувальна щілина живильника збільшується в напрямку підйому камери в межах крупності завантажуваного матеріалу, яка відрізняється тим, що виконавчі органи виконані у вигляді...
Спосіб одержання агломерату
Номер патенту: 3015
Опубліковано: 15.09.2004
Автори: Козенко Георгій Володимирович, Шеремет Володимир Олександрович, Оторвін Павло Іванович, Кривенко Юрій Юрійович, Сокуренко Анатолій Валентинович, Кекух Анатолій Володимирович, Чичиянц Григорій Ашотович, Шаповалов Віталій Олександрович, Савельєв Сергій Геннадійович
МПК: C22B 1/16
Мітки: одержання, агломерату, спосіб
Формула / Реферат:
Спосіб одержання агломерату, що включає бункерування, дозування складових шихти: залізорудної сировини, твердого палива, дробленого вапняку й вороття, їх первинне змішування, бункерування, вторинне змішування зі зволоженням і комкування, завантаження шихти на агломашину, запалювання й спікання, дроблення спеку, поділ його на агломерат і вороття шляхом просівання, який відрізняється тим, що в шихту включають дроблений вапняк із масовою часткою...
Спосіб виробництва агломерату
Номер патенту: 56724
Опубліковано: 15.05.2003
Автори: Гогенко Олег Олександрович, Шеремет Володимир Олександрович, Омесь Микола Михайлович, Сокуренко Анатолій Валентинович, Кріпак Станіслав Миколайович, Кекух Анатолій Володимирович, Орел Григорій Іванович, Челомбитько Олександр Олексійович, Котляр Михайло Ігорович, Садовник Віктор Тихонович
МПК: C22B 1/24
Мітки: виробництва, спосіб, агломерату
Формула / Реферат:
Спосіб виробництва агломерату, що включає складування, попереднє змішування та усереднювання матеріалів шляхом формування штабеля, дозування, змішування, огрудкування та спікання аглошихти, який відрізняється тим, що 40-90 % мас. від загальної кількості вапняку фракції 0-3 мм вміщують в штабель залізовмісної частини шихти, а залишок задають в аглошихту під час дозування компонентів.
Машина виборного дроблення
Номер патенту: 33930
Опубліковано: 15.08.2003
Автори: Волошин Григорій Мусійович, Томурко Олександр Андрійович, Волошин Анатолій Григорович
МПК: B02C 1/00, B02C 23/08
Мітки: дроблення, виборного, машина
Формула / Реферат:
1. Машина виборного дроблення, що містить щоки з похилою камерою дроблення між ними, живильник, при цьому кут захвату камери дроблення є проміжним між подвійними кутами тертя розділюваних матеріалів, яка відрізняється тим, що похила камера дроблення оснащена гнучкою завісою, вертикально встановленою в похилій камері дроблення з утворенням у верхній частині останньої приймальної камери.2. Машина за п.1, яка відрізняється тим, що кут...
Машина виборчого дроблення
Номер патенту: 33930
Опубліковано: 15.02.2001
Автори: Волошин Анатолій Григорович, Волошин Григорій Мусійович, Томурко Олександр Андрійович
МПК: B02C 23/08, B02C 1/00
Мітки: машина, виборчого, дроблення
Формула / Реферат:
1. Машина виборного дроблення, що містить щоки з похилою камерою дроблення між ними, живильник, при цьому кут захвату камери дроблення є проміжним між подвійними кутами тертя розділюваних матеріалів, яка відрізняється тим, що похила камера дроблення оснащена гнучкою завісою, вертикально встановленою в похилій камері дроблення з утворенням у верхній частині останньої приймальної камери.2. Машина за п.1, яка відрізняється тим, що кут...
Попередній патент: Лезо, переважно для гоління, кірпікіна
Наступний патент: Лапа культиватора
Випадковий патент: Двотактний перетворювач напруги