Інформаційно-вимірювальна система
Номер патенту: 111957
Опубліковано: 11.07.2016
Автори: Конельський Володимир Анатолійович, Манжело Валерій Олександрович, Конельський Віктор Анатолійович




Формула / Реферат
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для кожного з цих рівнів, з'єднані каналами (5) міжвузлових зв'язків по три в одному кластері, яка відрізняється тим, що має дві окремі підсистеми, а мікропроцесорні вузли (6) кластерів верхнього рівня кожної з підсистем підключені до додаткових трьох мікропроцесорних вузлів (12), з'єднаних каналами міжвузлових зв'язків (13), які утворюють додатковий спільний для цих підсистем кластер супервізорного рівня, при цьому кожний мікропроцесорний вузол (6) кластера верхнього рівня будь-якої з підсистем підключено каналами міжвузлових зв'язків (14 та 15) до двох суміжних мікропроцесорних вузлів (12) кластера супервізорного рівня.
Текст
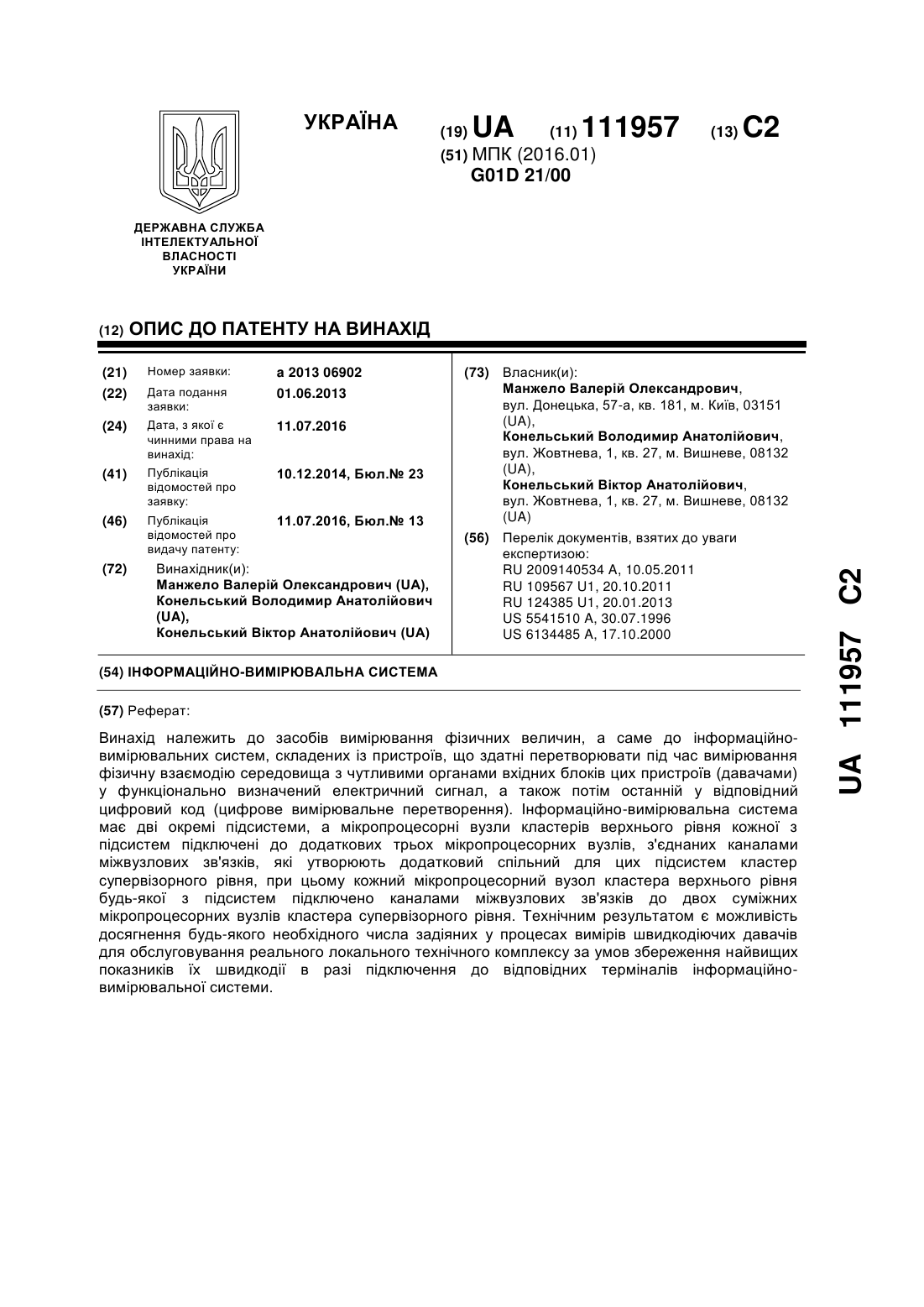
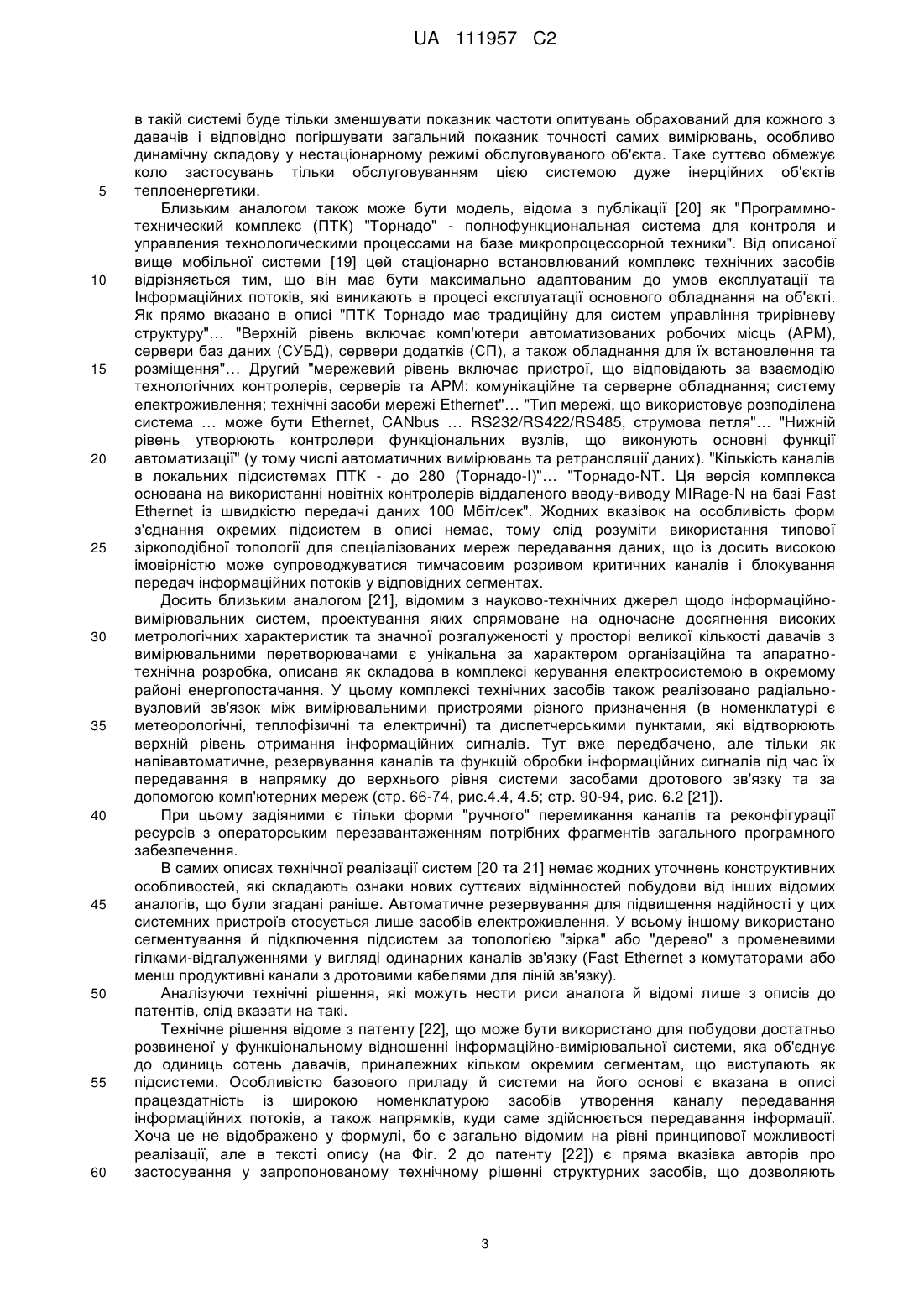
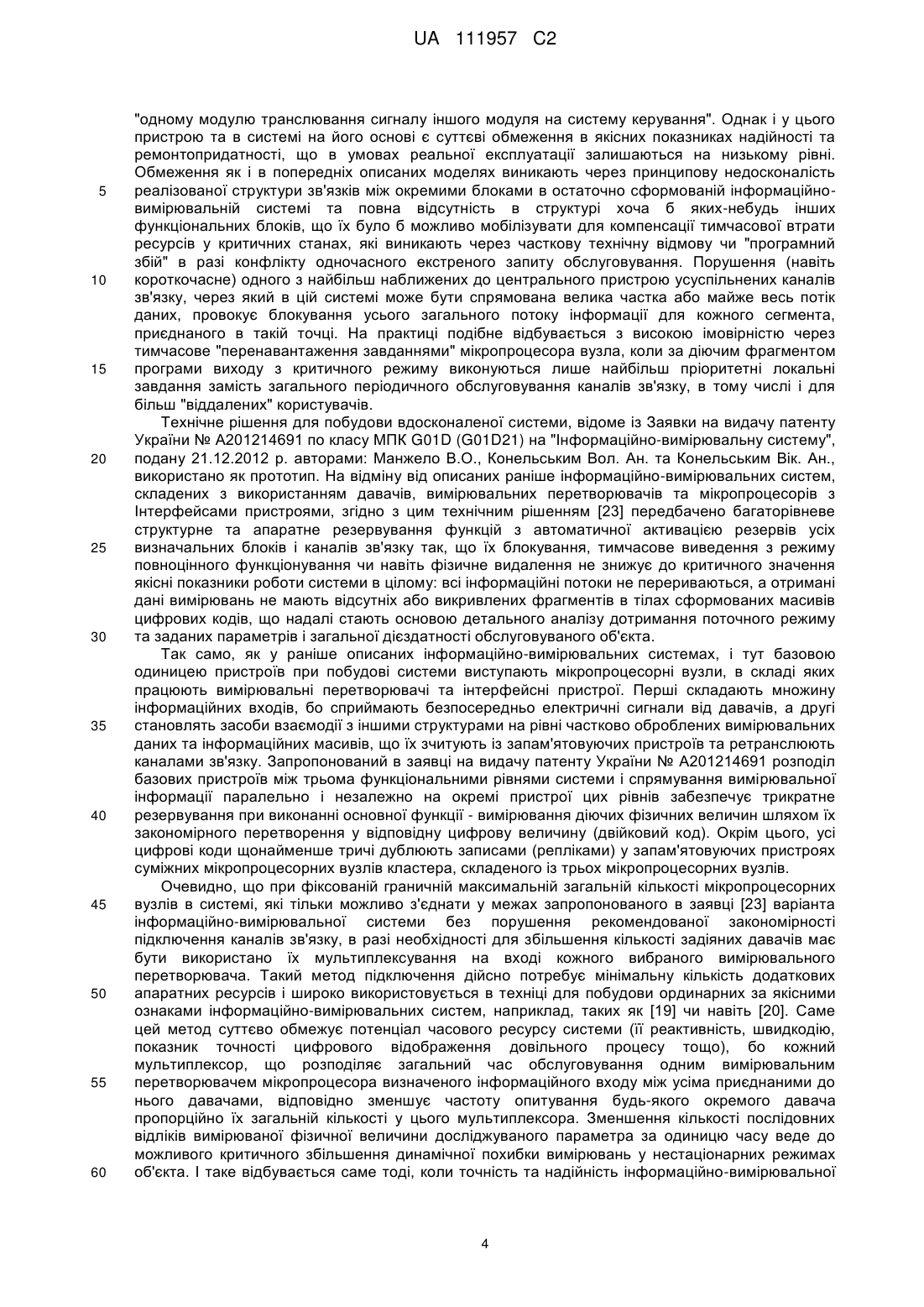
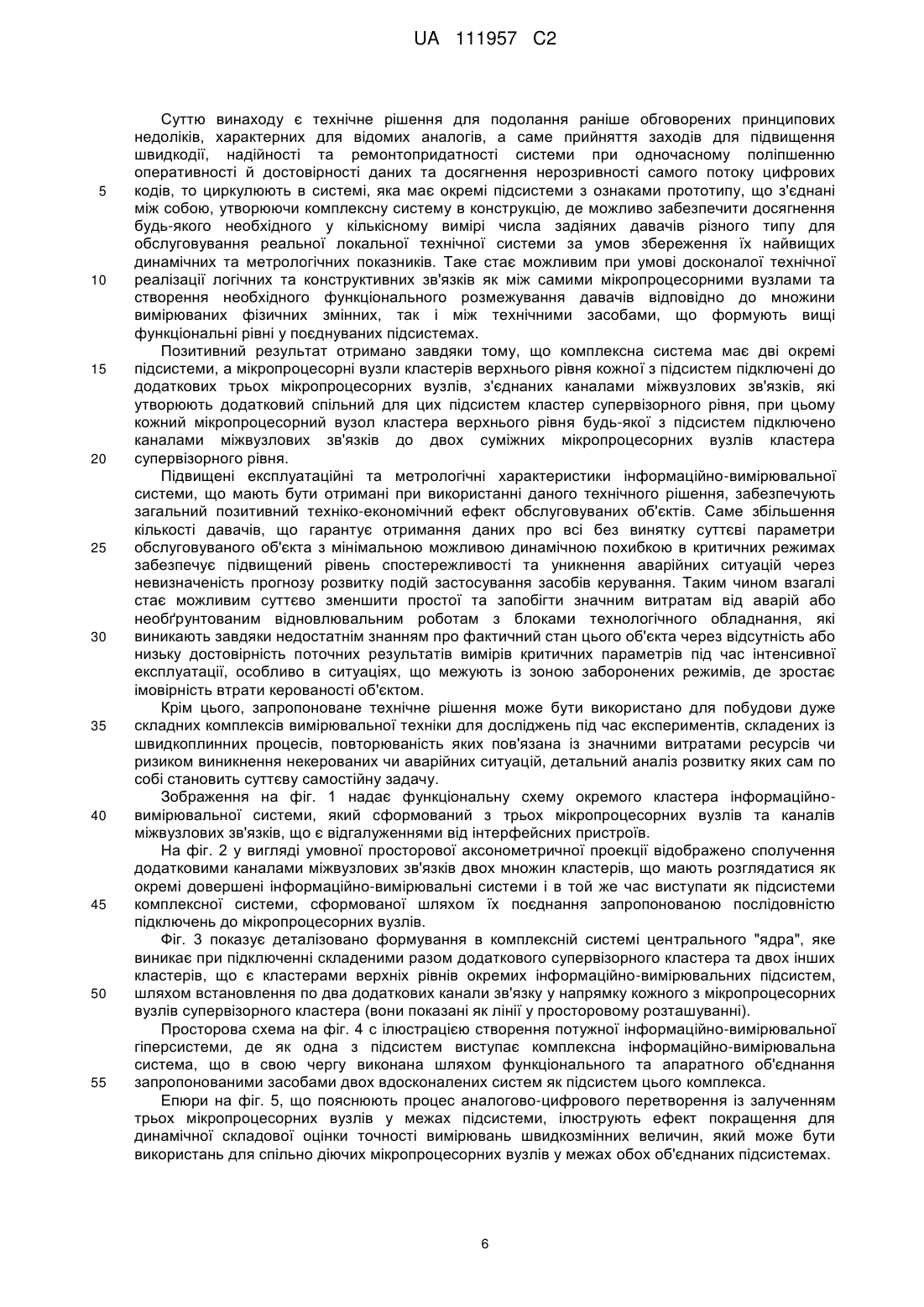
Реферат: Винахід належить до засобів вимірювання фізичних величин, а саме до інформаційновимірювальних систем, складених із пристроїв, що здатні перетворювати під час вимірювання фізичну взаємодію середовища з чутливими органами вхідних блоків цих пристроїв (давачами) у функціонально визначений електричний сигнал, а також потім останній у відповідний цифровий код (цифрове вимірювальне перетворення). Інформаційно-вимірювальна система має дві окремі підсистеми, а мікропроцесорні вузли кластерів верхнього рівня кожної з підсистем підключені до додаткових трьох мікропроцесорних вузлів, з'єднаних каналами міжвузлових зв'язків, які утворюють додатковий спільний для цих підсистем кластер супервізорного рівня, при цьому кожний мікропроцесорний вузол кластера верхнього рівня будь-якої з підсистем підключено каналами міжвузлових зв'язків до двох суміжних мікропроцесорних вузлів кластера супервізорного рівня. Технічним результатом є можливість досягнення будь-якого необхідного числа задіяних у процесах вимірів швидкодіючих давачів для обслуговування реального локального технічного комплексу за умов збереження найвищих показників їх швидкодії в разі підключення до відповідних терміналів інформаційновимірювальної системи. UA 111957 C2 (12) UA 111957 C2 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів вимірювання фізичних величин, а саме до систем, складених із пристроїв, що здатні перетворювати під час вимірювання фізичну взаємодію середовища з чутливими органами вхідних блоків цих пристроїв (давачами) у функціонально визначений електричний сигнал, а також потім останній у відповідний цифровий код (цифрове вимірювальне перетворення). Мікропроцесорні пристрої та канали зв'язку між ними забезпечують в системі автоматичну реалізацію наперед заданої програми вимірювань та передавання отриманої інформації у вигляді потоку даних (цифрових кодів) на адресу інших приймачів. Інформаційно-вимірювальна система з наданими вище ознаками може використовуватися в промисловості й науково-дослідницькій діяльності при забезпеченні якісної технічної підтримки широкого кола реальних задач автоматичних вимірювань, спостереження за технічним станом та управління об'єктами, що потребують отримання узгоджених швидкозмінних даних з великої кількості різноманітних давачів із мінімальною затримкою у часі. Ці системи проектують як такі, що забезпечують високий рівень готовності, надійності та ремонтопридатності технічних засобів й оперативності та достовірності отриманих даних, який дозволяє їх використання у так званих "важких" умовах експлуатації: на сучасному автоматизованому транспорті (швидкісна залізниця та авіація), в енергетиці, у хімічній та гірничо-добувній промисловості для гарантування рівня метрологічного забезпечення та інших видів інформаційного обслуговування визначеного відповідального технологічного обладнання в межах досліджуваних об'єктів. Особливістю запропонованого в заявці технічного рішення є можливість досягнення будьякого необхідного у кількісному вимірі числа задіяних у процесах вимірів давачів різного типу для обслуговування реального локального технічного комплексу за умов збереження найвищих показників їх швидкодії в разі підключення до відповідних терміналів інформаційновимірювальної системи. Інформаційно-вимірювальні системи, як подальший розвиток техніки телеметричних систем, обов'язково мають канали зв'язку, що автоматично за діючою програмою розподіляють і направляють сигнали від давачів у напрямку до засобів відображення інформації. Сучасні мікропроцесори як пристрої широкого кола застосувань є заздалегідь пристосованими ефективно працювати в подібних засобах автоматизації вимірювань. Більшість відомих інформаційно-вимірювальних систем, що використовують мікропроцесори як засіб програмованого керування засобами цифрових вимірювальних перетворювань, мають як базове технічне рішення для передавання цифрових кодів використання як спільного каналу зв'язку реверсивної "загальної шини". Таке рішення забезпечує інформаційну "досяжність" будьякого з давачів системи з мінімальними витратами технічних ресурсів. Саме тому, починаючи з перших промислових зразків лабораторних вимірювальних комплексів (з каналу цифрового зв'язку між лабораторними приладами, відомого як HP-Bus [1-3], a y модернізованому варіанті [4] з "гарячим" підключенням і відімкненням та видаленням засобів вимірювання), аж до промислової стандартизованої інформаційно-вимірювальної системи у модульному виконанні КАМАК (САМАС) [5-7], спосіб підключення пристроїв до шини залишається практично незмінним. Давачі як обов'язкові складові в такій системі підключені до вимірювальних перетворювачів, а вони в свою чергу з'єднані з мікропроцесорами, що мають інтерфейсні пристрої для взаємодії безпосередньо з каналами зв'язку. Підключення блоків реверсивної "загальної шини" і сама конструктивна реалізація такого каналу зв'язку навіть у межах базового оптимізованого конструктива (наприклад, спеціалізованого "крейта" САМАС) суттєво обмежує загальну продуктивність системи із зростанням кількості задіяних пристроїв та не виключає за несприятливих умов випадків повного блокування передачі сигналів уздовж шини, і як наслідок, втрату на певний час інформації про поточний режим та технічний стан обслуговуваного об'єкта. У більш сучасних варіантах виробів цього типу [8] пристрої лише доповнені засобами використання інтерфейсів до більш вживаних та сучасних каналів, наприклад, USB 2.0 (канал обміну сигналами "від точки до точки" за схемою "Hub-to-Device"), а також мережевих каналів з дисципліною Ethernet (у тому числі з підтримкою протоколів локальних мереж з комутаторами для реалізації топології "зірка" та протоколом ТСР/ІР для Internet). Показники готовності та надійності і тут все ж залишаються недостатніми для багатьох сфер їх застосування в промислових комплексах з обладнанням цілодобового циклу роботи через високу імовірність "мережевих конфліктів" та переривів зв'язку. Інші відомі Інформаційно-вимірювальні системи промислового призначення, що розроблені для вдосконалення якості пристроїв подібної конструкції, оптимізуючи їх окремі складові, нічого принципово нового в структуру і склад блоків не вносять. Ці вироби [9, 10] й досі користуються значним попитом через відносно невеликі витрати для їх реалізації. 1 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 В друкованих науково-технічних джерелах [11-15] описані загальні принципи побудови інформаційно-вимірювальних систем з використанням базових функціональних блоків, відомих із складу названих вище моделей. Всі описані в цих джерелах конструктивні особливості об'єднання блоків в систему, що стосуються форм зв'язків між давачами, вимірювальними перетворювачами і каналами зв'язку, які керовані засобами, сполученими з мікропроцесорами, тут не мають будь-якої нової сукупності конструктивних деталей, ніж визначені в технічній документації, що супроводжує вже названі промислові вироби. Однак усі описані моделі не забезпечують гарантованого високого рівня достовірності наданої вимірювальної інформації в складних умовах експлуатації, коли обставини жорстко вимагають обов'язкового дотримання мінімального періоду часу між послідовними актами вимірювань, нерозривність самого потоку даних вимірювальної інформації, стійкість системи до наслідків технічних та умисних руйнівних ушкоджень окремих блоків (каналів) чи тимчасової зупинки їх нормальної роботи, швидкого автоматичного відновлення послідовності надходження блоків вимірювальних даних в разі "збоїв" при коротких переривах загального живлення та його відновленні з резервних джерел електропостачання. Для забезпечення хоча б необхідної достовірності облікових даних розроблено численні варіанти інформаційно-вимірювальних систем [16, 17] для дистанційного періодичного отримування інформації з приладів обліку від різних фірм виробників, обладнаних своїми метрологічно атестованими давачами і вбудованими; перетворювачами. Невисокі вимоги до часових інтервалів між послідовними вимірами (від кількох десятків хвилин до кількох годин, або навіть діб), а також можливість проміжного фіксування вимірів на показуючих приладах для візуального контролю та можливого відновлення шляхом "ручного" вводу даних, дозволило використати в подібних системах її сегментацію (поділ на окремі підсистеми) із зв'язком між сегментами відносно малопродуктивними незахищеними каналами (наприклад, промисловий інтерфейс RS485, локальний Ethernet 10/100 та навіть мобільний зв'язок у стандарті GSM) [18]. При цьому кількість сегментів (приєднаних підсистем) в основному обумовлена кількістю обслуговуваних "точок для вимірювання" чи топологією просторового розподілу устроїв комплексної інформаційно-вимірювальної системи на умовній поверхні, що покриває множину досліджуваних об'єктів. Відомі інші інформаційно-вимірювальні системи, де розробники використали технічний прийом сегментації загальної структури системи для виділення підсистем, що обслуговують давачі для досліджуваних змінних величин певної фізичної природи: теплові, електричні, тиску пари чи повітря, рівня рідини, акустичні тощо. Такою є "Мобильная измерительная система для проведения гарантийных испытаний турбоустановок" [19] характерна тим, що в середовищі досить обмежених технічних ресурсів у цьому виробі для конструктивної реалізації розподілених підсистем для збирання даних та управління виконуючими пристроями працюють типові спеціалізовані модулі ADAM_5000/485 з мікроконтролерами, а для зв'язку з центральним комп'ютером використано двопровідні звиті дротові пари, що утворюють мережу на базі інтерфейсів RS_485. При цьому обмін ведеться лише по єдиній звитій парі. Імовірно, це зроблено так для забезпечення максимальної відстані до 1200 м при швидкості обміну у напівдуплексному режимі всього 62.5 Кбіт/сек. і для отримання як зарезервованої у самому кабелі другої звитої пари за умов "ручного" переключення дротів при виявленні яких-небудь дефектів у вже прокладеному кабельному каналі. В одній підсистемі нормативна кількість пристроїв ADAM_5000/485 обмежена трьома. В кожному з них встановлено модулі для обслуговування перетворювачів: ADAM_5013 з триканальними перетворювачами для термометрів опору - 3 одиниці; ADAM_5018 для підключення до 7 термопар - 3 одиниці; ADAM_5017 - повільний мультплексний аналоговоцифровий перетворювач на 8 каналів (амплітудна роздільна здатність - 16 двійкових розрядів) 4 одиниці. В сумі в одному сегменті так приєднано до 186 давачів, що в результаті мають наднизьку швидкодію (біля 0.05 біт/сек.). Через прояв явища дуже значної теплової Інерції на досліджуваному об'єкті такий вживаний спосіб їх опитування як мультиплексування є найбільш економічним технічним рішенням. Очевидно, що використана топологія "трипроменевої зірки" також забезпечує певну автономність будь-якого з трьох пристроїв ADAM_5000/485, які разом працюють як вищий функціональний рівень вимірювальної частини мобільної системи (портативний персональний комп'ютер тут є засобом інтегрального форматного відображення даних вимірювань), а також незалежність та дублювання даних (при відповідному розміщенні давачів на об'єкті). Однак, кількість давачів, що можуть дійсно працювати з високим рівнем швидкодії тут безумовно обмежена примітивною мережевою технологією, низькою пропускною здатністю каналів у допустимому режимі самого використаного інтерфейсу RS_485 та способом опитування давачів їх підключенням до мультиплексорів [11, 13, 15]. Збільшення числа давачів 2 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 в такій системі буде тільки зменшувати показник частоти опитувань обрахований для кожного з давачів і відповідно погіршувати загальний показник точності самих вимірювань, особливо динамічну складову у нестаціонарному режимі обслуговуваного об'єкта. Таке суттєво обмежує коло застосувань тільки обслуговуванням цією системою дуже інерційних об'єктів теплоенергетики. Близьким аналогом також може бути модель, відома з публікації [20] як "Программнотехнический комплекс (ПТК) "Торнадо" - полнофункциональная система для контроля и управления технологическими процессами на базе микропроцессорной техники". Від описаної вище мобільної системи [19] цей стаціонарно встановлюваний комплекс технічних засобів відрізняється тим, що він має бути максимально адаптованим до умов експлуатації та Інформаційних потоків, які виникають в процесі експлуатації основного обладнання на об'єкті. Як прямо вказано в описі "ПТК Торнадо має традиційну для систем управління трирівневу структуру"… "Верхній рівень включає комп'ютери автоматизованих робочих місць (АРМ), сервери баз даних (СУБД), сервери додатків (СП), а також обладнання для їх встановлення та розміщення"… Другий "мережевий рівень включає пристрої, що відповідають за взаємодію технологічних контролерів, серверів та АРМ: комунікаційне та серверне обладнання; систему електроживлення; технічні засоби мережі Ethernet"… "Тип мережі, що використовує розподілена система … може бути Ethernet, CANbus … RS232/RS422/RS485, струмова петля"… "Нижній рівень утворюють контролери функціональних вузлів, що виконують основні функції автоматизації" (у тому числі автоматичних вимірювань та ретрансляції даних). "Кількість каналів в локальних підсистемах ПТК - до 280 (Торнадо-І)"… "Торнадо-NT. Ця версія комплекса основана на використанні новітніх контролерів віддаленого вводу-виводу MIRage-N на базі Fast Ethernet із швидкістю передачі даних 100 Мбіт/сек". Жодних вказівок на особливість форм з'єднання окремих підсистем в описі немає, тому слід розуміти використання типової зіркоподібної топології для спеціалізованих мереж передавання даних, що із досить високою імовірністю може супроводжуватися тимчасовим розривом критичних каналів і блокування передач інформаційних потоків у відповідних сегментах. Досить близьким аналогом [21], відомим з науково-технічних джерел щодо інформаційновимірювальних систем, проектування яких спрямоване на одночасне досягнення високих метрологічних характеристик та значної розгалуженості у просторі великої кількості давачів з вимірювальними перетворювачами є унікальна за характером організаційна та апаратнотехнічна розробка, описана як складова в комплексі керування електросистемою в окремому районі енергопостачання. У цьому комплексі технічних засобів також реалізовано радіальновузловий зв'язок між вимірювальними пристроями різного призначення (в номенклатурі є метеорологічні, теплофізичні та електричні) та диспетчерськими пунктами, які відтворюють верхній рівень отримання інформаційних сигналів. Тут вже передбачено, але тільки як напівавтоматичне, резервування каналів та функцій обробки інформаційних сигналів під час їх передавання в напрямку до верхнього рівня системи засобами дротового зв'язку та за допомогою комп'ютерних мереж (стр. 66-74, рис.4.4, 4.5; стр. 90-94, рис. 6.2 [21]). При цьому задіяними є тільки форми "ручного" перемикання каналів та реконфігурації ресурсів з операторським перезавантаженням потрібних фрагментів загального програмного забезпечення. В самих описах технічної реалізації систем [20 та 21] немає жодних уточнень конструктивних особливостей, які складають ознаки нових суттєвих відмінностей побудови від інших відомих аналогів, що були згадані раніше. Автоматичне резервування для підвищення надійності у цих системних пристроїв стосується лише засобів електроживлення. У всьому іншому використано сегментування й підключення підсистем за топологією "зірка" або "дерево" з променевими гілками-відгалуженнями у вигляді одинарних каналів зв'язку (Fast Ethernet з комутаторами або менш продуктивні канали з дротовими кабелями для ліній зв'язку). Аналізуючи технічні рішення, які можуть нести риси аналога й відомі лише з описів до патентів, слід вказати на такі. Технічне рішення відоме з патенту [22], що може бути використано для побудови достатньо розвиненої у функціональному відношенні інформаційно-вимірювальної системи, яка об'єднує до одиниць сотень давачів, приналежних кільком окремим сегментам, що виступають як підсистеми. Особливістю базового приладу й системи на його основі є вказана в описі працездатність із широкою номенклатурою засобів утворення каналу передавання інформаційних потоків, а також напрямків, куди саме здійснюється передавання інформації. Хоча це не відображено у формулі, бо є загально відомим на рівні принципової можливості реалізації, але в тексті опису (на Фіг. 2 до патенту [22]) є пряма вказівка авторів про застосування у запропонованому технічному рішенні структурних засобів, що дозволяють 3 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 "одному модулю транслювання сигналу іншого модуля на систему керування". Однак і у цього пристрою та в системі на його основі є суттєві обмеження в якісних показниках надійності та ремонтопридатності, що в умовах реальної експлуатації залишаються на низькому рівні. Обмеження як і в попередніх описаних моделях виникають через принципову недосконалість реалізованої структури зв'язків між окремими блоками в остаточно сформованій інформаційновимірювальній системі та повна відсутність в структурі хоча б яких-небудь інших функціональних блоків, що їх було б можливо мобілізувати для компенсації тимчасової втрати ресурсів у критичних станах, які виникають через часткову технічну відмову чи "програмний збій" в разі конфлікту одночасного екстреного запиту обслуговування. Порушення (навіть короткочасне) одного з найбільш наближених до центрального пристрою усуспільнених каналів зв'язку, через який в цій системі може бути спрямована велика частка або майже весь потік даних, провокує блокування усього загального потоку інформації для кожного сегмента, приєднаного в такій точці. На практиці подібне відбувається з високою імовірністю через тимчасове "перенавантаження завданнями" мікропроцесора вузла, коли за діючим фрагментом програми виходу з критичного режиму виконуються лише найбільш пріоритетні локальні завдання замість загального періодичного обслуговування каналів зв'язку, в тому числі і для більш "віддалених" користувачів. Технічне рішення для побудови вдосконаленої системи, відоме із Заявки на видачу патенту України № А201214691 по класу МПК G01D (G01D21) на "Інформаційно-вимірювальну систему", подану 21.12.2012 р. авторами: Манжело В.О., Конельським Вол. Ан. та Конельським Вік. Ан., використано як прототип. На відміну від описаних раніше інформаційно-вимірювальних систем, складених з використанням давачів, вимірювальних перетворювачів та мікропроцесорів з Інтерфейсами пристроями, згідно з цим технічним рішенням [23] передбачено багаторівневе структурне та апаратне резервування функцій з автоматичної активацією резервів усіх визначальних блоків і каналів зв'язку так, що їх блокування, тимчасове виведення з режиму повноцінного функціонування чи навіть фізичне видалення не знижує до критичного значення якісні показники роботи системи в цілому: всі інформаційні потоки не перериваються, а отримані дані вимірювань не мають відсутніх або викривлених фрагментів в тілах сформованих масивів цифрових кодів, що надалі стають основою детального аналізу дотримання поточного режиму та заданих параметрів і загальної дієздатності обслуговуваного об'єкта. Так само, як у раніше описаних інформаційно-вимірювальних системах, і тут базовою одиницею пристроїв при побудові системи виступають мікропроцесорні вузли, в складі яких працюють вимірювальні перетворювачі та інтерфейсні пристрої. Перші складають множину інформаційних входів, бо сприймають безпосередньо електричні сигнали від давачів, а другі становлять засоби взаємодії з іншими структурами на рівні частково оброблених вимірювальних даних та інформаційних масивів, що їх зчитують із запам'ятовуючих пристроїв та ретранслюють каналами зв'язку. Запропонований в заявці на видачу патенту України № А201214691 розподіл базових пристроїв між трьома функціональними рівнями системи і спрямування вимірювальної інформації паралельно і незалежно на окремі пристрої цих рівнів забезпечує трикратне резервування при виконанні основної функції - вимірювання діючих фізичних величин шляхом їх закономірного перетворення у відповідну цифрову величину (двійковий код). Окрім цього, усі цифрові коди щонайменше тричі дублюють записами (репліками) у запам'ятовуючих пристроях суміжних мікропроцесорних вузлів кластера, складеного із трьох мікропроцесорних вузлів. Очевидно, що при фіксованій граничній максимальній загальній кількості мікропроцесорних вузлів в системі, які тільки можливо з'єднати у межах запропонованого в заявці [23] варіанта інформаційно-вимірювальної системи без порушення рекомендованої закономірності підключення каналів зв'язку, в разі необхідності для збільшення кількості задіяних давачів має бути використано їх мультиплексування на вході кожного вибраного вимірювального перетворювача. Такий метод підключення дійсно потребує мінімальну кількість додаткових апаратних ресурсів і широко використовується в техніці для побудови ординарних за якісними ознаками інформаційно-вимірювальних систем, наприклад, таких як [19] чи навіть [20]. Саме цей метод суттєво обмежує потенціал часового ресурсу системи (її реактивність, швидкодію, показник точності цифрового відображення довільного процесу тощо), бо кожний мультиплексор, що розподіляє загальний час обслуговування одним вимірювальним перетворювачем мікропроцесора визначеного інформаційного входу між усіма приєднаними до нього давачами, відповідно зменшує частоту опитування будь-якого окремого давача пропорційно їх загальній кількості у цього мультиплексора. Зменшення кількості послідовних відліків вимірюваної фізичної величини досліджуваного параметра за одиницю часу веде до можливого критичного збільшення динамічної похибки вимірювань у нестаціонарних режимах об'єкта. І таке відбувається саме тоді, коли точність та надійність інформаційно-вимірювальної 4 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 системи мають бути гарантовано найбільш наближеним до рівня теоретично можливого (граничної амллітудно-часової роздільної здатності для самого сенсора-давача). Швидкодіючі давачі високого класу точності розроблені таким чином, щоб із заявленою роздільною здатністю і відповідною розрядністю двійкових кодів вони відображали в отриманому цифровому еквіваленті з похибкою до половини ваги молодшого розряду всю множину ординат синусоїдальної функції, що має частоту удвічі вищу за верхній рівень обмеження граничної частоти в спектрі часових змінювань вимірюваної фізичної величини (згідно з розрахунками за теоремою Шенона-Котєльнікова). Для сучасних давачів, що орієнтовані для використання в оптичній і надвисокочастотній зв'язковій техніці та засобах лазерно-оптичної, мікрохвильової та ультразвукової акустичної діагностики, які основані на методах фазометрії, ця подвійна частота лежить на рівні одиниць гігагерців. Тобто це практично співпадає з межею функціональних можливостей обробки довільних сигналів для найпотужніших 8-12 ядерних мікропроцесорів (наприклад, мікропроцесорів фірми AMD: Opteron 6136, 8 ядер, 2,4 ГГц (80 Вт); Opteron 6176 SE, 12 ядер, 2.3 ГГц, (105 Вт)) обслуговувати при прямому приєднанні до системної шини в одному кадрі синхронізованих вимірювань лише від 2-3 (режим "2D"-"3D") до 6-8 швидкісних вимірювальних перетворювачів. Такі обставини виключають мультиплексування як ефективний засіб підключення необхідної підвищеної кількості сучасних швидкодіючих давачів там, де потрібно використання їх повного динамічного діапазону. Продуктивним стає технічне рішення об'єднання реально необхідної кількості швидкодіючих давачів і вимірювальних перетворювачів у межах заявленої досконалої інформаційновимірювальної системи [23], яка складена із закономірно з'єднаних кластерів, що включають по три мікропроцесорних вузли з інтерфейсними пристроями, де загальний період синхронного опитування давачів для трьох рівнів розділено в часі на три частини, і в кожній з них відображено цифровий еквівалент вимірюваної величини із зрушенням у часі на одну третину періоду. При суміщеній обробці даних трьох вимірів одного кадру фактична часова роздільна здатність може бути підвищена майже удвічі. Саме ця система має виступати як підсистема (сегмент) більш складної та відповідно більш потужної за кількістю обслуговуваних швидкодіючих давачів комплексної інформаційно-вимірювальної системи, інші підсистеми якої також побудовані у відповідності з описом до заявки № А201214691 [23]. За таких умов використання типових засобів об'єднання підсистем у комплексну систему засобами, які відомі з описів [1-14], [19] та [22], наприклад, з'єднання мікропроцесорних вузлів супервізорного рівня (на кресленні Фіг. 5 до опису заявки № А201214691 [23] цей вузол позначено позицією 12) за допомогою лише однієї реверсивної "загальної шипи" чи "зіркою", складеною із застосуванням каналів RS_485 або навіть Gigabit Ethernet із виділеним комутатором 10/100/1000 Мбіт/сек. фізичних каналів з дротових кабелів UTP_5, неодмінно призведе до зниження як розрахункового, так і фактичного показника загальної надійності через вимушене введення в структурі оптимізованої резервованої системи нерезервованих ланок на її найвищому (!) рівні. При такій конструкції самої з'єднуючої частини для підсистем комплексної системи з високою імовірністю слід очікувати прояви відомого ефекту інформаційного блокування каналу з "перевантаженим" вузлом, технічним чи аварійним розривом зв'язку, неможливість "гарячої" заміни відмовного пристрою тощо. З проведеного аналізу технічного рівня й оцінки якостей вибраних відомих аналогів стають очевидними їх обмеження швидкодії системи при виконанні вимірювальних операцій через примітивне об'єднання структурних частин, включаючи підсистеми, що крім усього може призводити до тимчасової структурної деградації усієї системи через порушення зв'язку між окремими сегментами та втратами даних, які мають від них надходити. Найвищі показники швидкодії та надійності, досягнуті шляхом досконалої побудови окремих підсистем з реалізацією багаторівневого резервування функцій та апаратних засобів, а також досягненням підвищеної часової роздільної здатності, можуть бути зведені до рівня ординарних показників невідповідними засобами об'єднанню самих підсистем у комплексну систему, як це виходить через прояви недоліків "найслабшої ланки", яка з'являється в конструкції. Загальними конструктивними ознаками найближчого аналога та інформаційновимірювальної системи, яка пропонується згідно із цією заявкою на отримання патенту, є те, що всі вони включають давачі з вимірювальними перетворювачами та мікропроцесори з інтерфейсними пристроями, і з них сформовано основу мікропроцесорного вузла, а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для кожного з цих рівнів з'єднані каналами міжвузлових зв'язків по три в одному кластері. 5 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 Суттю винаходу є технічне рішення для подолання раніше обговорених принципових недоліків, характерних для відомих аналогів, а саме прийняття заходів для підвищення швидкодії, надійності та ремонтопридатності системи при одночасному поліпшенню оперативності й достовірності даних та досягнення нерозривності самого потоку цифрових кодів, то циркулюють в системі, яка має окремі підсистеми з ознаками прототипу, що з'єднані між собою, утворюючи комплексну систему в конструкцію, де можливо забезпечити досягнення будь-якого необхідного у кількісному вимірі числа задіяних давачів різного типу для обслуговування реальної локальної технічної системи за умов збереження їх найвищих динамічних та метрологічних показників. Таке стає можливим при умові досконалої технічної реалізації логічних та конструктивних зв'язків як між самими мікропроцесорними вузлами та створення необхідного функціонального розмежування давачів відповідно до множини вимірюваних фізичних змінних, так і між технічними засобами, що формують вищі функціональні рівні у поєднуваних підсистемах. Позитивний результат отримано завдяки тому, що комплексна система має дві окремі підсистеми, а мікропроцесорні вузли кластерів верхнього рівня кожної з підсистем підключені до додаткових трьох мікропроцесорних вузлів, з'єднаних каналами міжвузлових зв'язків, які утворюють додатковий спільний для цих підсистем кластер супервізорного рівня, при цьому кожний мікропроцесорний вузол кластера верхнього рівня будь-якої з підсистем підключено каналами міжвузлових зв'язків до двох суміжних мікропроцесорних вузлів кластера супервізорного рівня. Підвищені експлуатаційні та метрологічні характеристики інформаційно-вимірювальної системи, що мають бути отримані при використанні даного технічного рішення, забезпечують загальний позитивний техніко-економічний ефект обслуговуваних об'єктів. Саме збільшення кількості давачів, що гарантує отримання даних про всі без винятку суттєві параметри обслуговуваного об'єкта з мінімальною можливою динамічною похибкою в критичних режимах забезпечує підвищений рівень спостережливості та уникнення аварійних ситуацій через невизначеність прогнозу розвитку подій застосування засобів керування. Таким чином взагалі стає можливим суттєво зменшити простої та запобігти значним витратам від аварій або необґрунтованим відновлювальним роботам з блоками технологічного обладнання, які виникають завдяки недостатнім знанням про фактичний стан цього об'єкта через відсутність або низьку достовірність поточних результатів вимірів критичних параметрів під час інтенсивної експлуатації, особливо в ситуаціях, що межують із зоною заборонених режимів, де зростає імовірність втрати керованості об'єктом. Крім цього, запропоноване технічне рішення може бути використано для побудови дуже складних комплексів вимірювальної техніки для досліджень під час експериментів, складених із швидкоплинних процесів, повторюваність яких пов'язана із значними витратами ресурсів чи ризиком виникнення некерованих чи аварійних ситуацій, детальний аналіз розвитку яких сам по собі становить суттєву самостійну задачу. Зображення на фіг. 1 надає функціональну схему окремого кластера інформаційновимірювальної системи, який сформований з трьох мікропроцесорних вузлів та каналів міжвузлових зв'язків, що є відгалуженнями від інтерфейсних пристроїв. На фіг. 2 у вигляді умовної просторової аксонометричної проекції відображено сполучення додатковими каналами міжвузлових зв'язків двох множин кластерів, що мають розглядатися як окремі довершені інформаційно-вимірювальні системи і в той же час виступати як підсистеми комплексної системи, сформованої шляхом їх поєднання запропонованою послідовністю підключень до мікропроцесорних вузлів. Фіг. 3 показує деталізовано формування в комплексній системі центрального "ядра", яке виникає при підключенні складеними разом додаткового супервізорного кластера та двох інших кластерів, що є кластерами верхніх рівнів окремих інформаційно-вимірювальних підсистем, шляхом встановлення по два додаткових канали зв'язку у напрямку кожного з мікропроцесорних вузлів супервізорного кластера (вони показані як лінії у просторовому розташуванні). Просторова схема на фіг. 4 с ілюстрацією створення потужної інформаційно-вимірювальної гіперсистеми, де як одна з підсистем виступає комплексна інформаційно-вимірювальна система, що в свою чергу виконана шляхом функціонального та апаратного об'єднання запропонованими засобами двох вдосконалених систем як підсистем цього комплекса. Епюри на фіг. 5, що пояснюють процес аналогово-цифрового перетворення із залученням трьох мікропроцесорних вузлів у межах підсистеми, ілюструють ефект покращення для динамічної складової оцінки точності вимірювань швидкозмінних величин, який може бути використань для спільно діючих мікропроцесорних вузлів у межах обох об'єднаних підсистемах. 6 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 Чутливими (сенсорними) елементами запропонованої системи є давачі 1 (Фіг. 1), що приєднані до відповідних вимірювальних перетворювачів 2. Виходи вимірювальних перетворювачів 2 у свою чергу приєднані до вхідних пристроїв (наприклад, приймальних регістрів, що на фіг. 1 зображені малими прямокутниками), керованих мікропроцесором 3 через наявні в типовій конструкції мікропроцесорного комплексу специфічні шини сигналів вхідних даних (показано умовно як один подовжений прямокутник, що межує з приймальними регістрами). Також до мікропроцесора 3 приєднаний через набір його внутрішніх шин (подовжений прямокутник) інтерфейсний пристрій 4, від якого відгалужені лінії передавання цифрових кодів, що утворюють канали 5 зв'язків. Кожний комплекс функціональних блоків 1-4 існує в цій системі як основа її базового пристрою - мікропроцесорного вузла 6, в складі якого можуть бути також інші блоки (наприклад, додаткової зовнішньої пам'яті, засобів індикації, внутрішньої діагностики та подібні до них), що не впливають на конструкцію інформаційновимірювальної системи згідно з даним технічним рішенням. Вони показані на фіг. 1 окремим великим прямокутником, що межує з набором внутрішніх шин - подовженим прямокутником. Канали 5 зв'язків, які виходять з інтерфейсного пристрою 4 одного мікропроцесорного вузла 6 закінчуються приєднаними до такого ж інтерфейсного пристрою іншого мікропроцесорного вузла 6. В системі вони виступають каналами міжвузлових зв'язків і загалом утворюють спеціалізовану мережу передавання даних вимірювання у вигляді цифрових кодів. Три канали 5 міжвузлових зв'язків з'єднали між собою три мікропроцесорних вузли 6 в єдине конструктивне угрупування, яке в прототипі і в цьому описі носить назву "кластер". В межах кластера кожний з його мікропроцесорних вузлів 6 є підключеним до двох сусідніх так, що реалізовано надсилання та приймання від них цифрових кодів через канали 5 міжвузлових зв'язків та інтерфейсні пристрої 4 незалежно від технічного стану або режиму активності того з вузлів 6 кластера, який в цю мить не приймає участі в поточному інформаційному обміні. Така можливість фізичної ізоляції та інформаційної незалежності є суттєвою особливістю "логічних каналів" типу "від точки до точки" (наприклад, стандартних каналів з протоколом RS_232; RS_485; USB_2.0; USB_3.0; IEEE 1394 interface (FireWire); Serial ATA (SATА) та ін., або ж спеціально виконаних для такої системи безметалевих каналів з використанням окремих відрізків тонкого оптично-волоконного кабелю та лазерно-діодних електрооптичних перетворювачів на їх кінцях, коли гранична продуктивність передавання цифрових кодів тут може бути піднята до рівня у 10 Гбіт/сек. з досягненням практично повної нечутливості до сильних електромагнітних полів завад). Уся множина наявних у системі мікропроцесорних вузлів 6 з необхідною кількістю швидкодіючих давачів складають дві окремі інформаційно-вимірювальні підсистеми відповідно умовно окреслені та визначені позиціями 7 та 8 (Фіг. 2). Кластер із трьох мікропроцесорних вузлів 6 на нижчому функціональному рівні є приєднаним лише до одного мікропроцесорного вузла у кластері на вищому рівні шляхом з'єднання трьох інтерфейсних пристроїв 4 каналами 9 міжвузлових зв'язків з одним мікропроцесорним вузлом 6 на вищому рівні. При описаній формі з'єднання канали 9 міжвузлових зв'язків забезпечили трансляцію даних (цифрових кодів), отриманих від давачів 1, приналежних будь-якому з мікропроцесорних вузлів кластера на нижчому рівні, до мікропроцесорного вузла 6 на вищому рівні, а також надають постійний інформаційний зв'язок транслюванням цифрових кодів через один безпосередній шлях та при необхідності через будьякі чотири альтернативні шляхи. Каналами 10 міжвузлових зв'язків з'єднано мікропроцесорні вузли 6 суміжних кластерів, приналежних одному логічному рівню, в одне угрупування, що в описі прототипу назване "домен" відповідного рівня. З'єднання каналами 5 та 10 міжвузлових зв'язків виконано так, що вони підключені послідовно по черзі. Тоді на кінцевому кроці вказаної форми підключення стає утвореним постійно існуючий спільний для трьох кластерів кільцевий шлях з шести каналів (5, 10, 5, 10, 5, 10) міжвузлових зв'язків для передавання цифрових кодів між будь-якою парою вузлів 6 цього домену завдяки трансляції даних вузлами-посередниками із числа задіяних в кожному кластері. В самій інформаційно-вимірювальній системі з ознаками прототипу, яка і є переважно використаною для побудови підсистем 7 та 8, за допомогою діагональних міжрівневих каналів 11 міжвузлових зв'язків з'єднують три мікропроцесорні вузли 6 кластерів одного з доменів на нижчому функціональному рівні, які ще не були задіяні в формуванні кільцевого шляху за допомогою каналів 5 та 10, з трьома мікропроцесорними вузлами 6 одного кластера вищого рівня. Таке з'єднання забезпечує сформованість гарантованих альтернативних шляхів передавання цифрових кодів в кожній з підсистем в разі технічного чи аварійного виключення із числа наявних навіть кількох суміжних мікропроцесорних вузлів 6 з множини приналежних до цієї групи. 7 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 У підсистемах 7 та 8 на їх верхньому функціональному рівні утворені два кластери з мікропроцесорних вузлів 6, що мають досконалий інформаційний зв'язок з будь-яким із своїх мікропроцесорних вузлів 6 нижніх рівнів. При можливому "найтяжчому" одночасному блокуванні (чи навіть руйнуванні) від п'яти до семи з багатьох існуючих каналів 5, 9, 10 чи 11, що можуть діяти як альтернативні канали формування шляхів для міжвузлових зв'язків, загальний потік даних в межах цих підсистем між мікропроцесорними вузлами 6 не зникає. Тобто в конструкції кожної з підсистем досягнуто реальну нерозривність потоку вимірювальної інформації у напрямку до їх верхніх функціональних рівнів. Для забезпечення зв'язку між самими підсистемами 7 та 8, який відповідає належній високій якості та стійкості до руйнівних дій, застосовано закономірне активне резервування каналів передачі даних та самих мікропроцесорних вузлів. За допомогою додаткових мікропроцесорних вузлів 12 тут утворено додатковий супервізорний кластер (Фіг. 2), підключений каналами міжвузлових зв'язків одночасно до двох кластерів верхнього рівня обох підсистем 7 та 8. Додаткові канали 13 міжвузлових зв'язків (Фіг. 3) підключені до мікропроцесорних вузлів 12 і забезпечують трансляцію цифрових кодів між будь-якою парою з них незалежно від стану третього вузла 12 цього супервізорного кластера. Кожний з мікропроцесорних вузлів 6 кластерів верхнього рівня підсистем 7 та 8 підключено до суміжних з ними мікропроцесорних вузлів 12 супервізорного кластера за допомогою прямих каналів 14 та діагональних каналів 15 міжвузлових зв'язків. Цим в зоні "ядра" (Фіг. 3) комплексної інформаційно-вимірювальної системи утворено шість замкнених трикутних ("кільцевих" та умовно автономних) шляхів для передавання даних, які послідовно включають канали 13, 14 та 15 міжвузлових зв'язків і забезпечують просування та реплікацію цифрових кодів в будь-якому напрямку практично незалежно від їх реального стану дієздатності так, що один чи навіть два із загального числа каналів міжвузлових зв'язків або мікропроцесорних вузлів в поточну миттєвість можуть бути функціонально непрацездатними ("заблоковані"), або знаходяться в неробочому стані чи взагалі відімкнені і виключені із складу цієї конструкції. Комплексна інформаційно-вимірювальна система, створена у відповідності з даним технічним рішенням, у порівнянні з прототипом об'єднує, що найменше удвічі більше мікропроцесорних вузлів 6, до яких за технічними умовами мають бути приєднаними безпосередньо первинні джерела вимірювальної інформації - давачі 1 та вимірювальні перетворювачі 2 (Фіг. 1). Загальна кількість досконало об'єднаних в єдину конструкцію мікропроцесорних вузлів, 6 та 12 разом у двох підсистемах 7 та 8 може досягати 82 одиниць, а кількість приєднаних до них давачів 1, які мікропроцесорні вузли обслуговують на нижніх рівнях підсистем без застосування мультиплексорів, тобто із максимальною можливою частотою опитування, має становити біля семи-восьми сотень і навіть більше залежно від швидкодії використаних аналогово-цифрових перетворювачів і продуктивності самих мікропроцесорів. Коли ця кількість теж є меншою, ніж за його конструкцією потребує потужний обслуговуваний динамічний об'єкт для забезпечення визначеного найвищого рівня якості для спостережливості в екстремальних режимах, заявленим технічним рішенням передбачено використання спеціально побудованої інформаційно-вимірювальної гіперсистеми (Фіг. 4), кількість швидкодіючих здавачів, в якій може досягати будь-якого потрібного значення (реально до 2-3 тисяч). Гіперсистема є створеною шляхом приєднання до комплексної інформаційно-вимірювальної системи, яка включає, наприклад, з'єднані між собою підсистеми 7 та 8, будь-якої іншої аналогічної підсистеми. Таке виконано завдяки тому, що в склад гіперсистеми (Фіг. 4) додатково включено мікропроцесорні вузли 16,1 вони з'єднані у новий додатковий супервізорний кластер каналами 13 міжвузлових зв'язків. Мікропроцесорні вузли 17 приєднаної підсистеми (на фіг. 4 зображені подвійними еліпсами) з'єднані між собою каналами 5 міжвузлових зв'язків і таким чином складають кластер її верхнього рівня. Кожний з мікропроцесорних вузлів 17 приєднаний до пари суміжних мікропроцесорних вузлів 16 супервізорного кластера відповідно прямими каналами 18 та діагональними каналами 19 міжвузлових зв'язків. З боку комплексної інформаційно-вимірювальної системи, що включає підсистеми 7 та 8, кластером вищого рівня, придатним для приєднання, визначено такий, що утворено двома мікропроцесорними вузлами 6 підсистеми 7 з її каналами 5 міжвузлових зв'язків та мікропроцесорним вузлом 12 супервізорного кластера з каналами 14 та 15 міжвузлових зв'язків. Ще більш складна інформаційно-вимірювальна система при необхідності має бути створена з використанням заявленого технічного рішення для розширення самої гіперсистеми як потужного виробу, коли приєднано іншу аналогічну підсистему до вже раніше створеної гіперсистеми як однієї із складаючих усю конструкцію із цих підсистем. Для цього було виділено два мікропроцесорних вузли з числа тих, що межують з одним із мікропроцесорних вузлів 8 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 супервізорного кластера, та використовуючи ці наявні три мікропроцесорних вузли як кластер верхнього рівня, з'єднано його мікропроцесорні вузли прямими і діагональними каналами міжвузлових зв'язків з додатковим супервізорним кластером, що є спільним з кластером верхнього рівня приєднуваної підсистеми. Діючи за таким методом і використовуючи запропоноване технічне рішення і надалі стає можливим додати до створюваної на кожному кроці розширення ще одну підсистему, не втрачаючи при цьому загалом властивість всього утворення до активного резервування апаратної частини (мікропроцесорних вузлів і каналів міжвузлових зв'язків) та зберігаючи потрійну кількість незалежних джерел первинної вимірювальної інформації (три давачі в одній зоні дії змінної фізичної величини) буде створена нова гіперсистема. Це означає, що при визначеному підході завжди можливо для реального обслуговуваного динамічного об'єкта встановити будь-яку необхідну кількість давачів, що будуть працювати в режимі з найвищою характерною для їх конструкції продуктивністю і показником динамічної якості, а взаємодія з мікропроцесорним вузлом реалізована прямим підключенням вимірювального перетворювача без використання проміжних мультиплексорів. Виконавши підключення супервізорних кластерів з мікропроцесорними вузлами типу таких, що означені позиціями 17 до вузлів 6 та 12 отримано можливість забезпечення прямого обслуговування вже близько 3-5 тисяч (і більше) швидкодіючих давачів у восьми з'єднаних між собою підсистемах, подібних до описаної у прототипі [23]. При цьому конструктивно в центральній зоні ("ядрі" гіперсистеми) буде сформовано ще до дванадцяти проміжних кластерів верхнього рівня, що мають мікропроцесорні вузли типу означених позиціями 12 та 16 або 16 та 17, і всі вони придатні для підключення додаткових супервізорних кластерів, а через них у свою чергу також нових приєднаних підсистем, якщо таке розширення виявиться технічно необхідним та функціонально раціональним. Об'єднані підсистеми функціонують наступним порядком. Змінні фізичні величини, показані епюрами 20 (Фіг. 5), що діють незалежно й одночасно на три давачі, розташовані в одній вимірювальній зоні, яка відповідає встановленому для об'єкта досліджуваному параметру, продукують змінювані певним чином електричні сигнали на їх виходах (пряме аналогове електричне, механо-електричне або тепло-електричне перетворення). З виходів давачів ці електричні сигнали (напруга на терміналах чи змінюваний струм у петлі) надходять безпосередньо на входи вимірювальних перетворювачів, які періодично із заданою частотою циклічного повторювання процесу перетворень формують багаторозрядні двійкові коди у відповідності з миттєвим значенням електричного сигналу. Мікропроцесор 3 завдяки діючій програмі керування приєднаними до його шин адрес та даних вимірювальними перетворювачами періодично зчитує ці коди як реалізацію в його програмі найшвидшої операції типу "регістр-регістр", виконує проміжне запам'ятовування (наприклад, шляхом найшвидшого прямого доступу у пам'ять), а потім необхідну цифрову фільтрацію та корекцію цієї первинної інформації, і нарешті формує з частково оброблених послідовностей кодів кадри вимірювальної інформації для подальшого їх використання на вищих рівнях інформаційно-вимірювальної системи. Процес аналогово-цифрового перетворення, наприклад, за швидкісним алгоритмом прогнозованого порозрядного "зважування", все ж займає певний час в циклі роботи кожного з трьох перетворювачів, що відображено графіками 21, 22 та 23, складеними із відрізків ломаних ліній, які символічно показують проміжні порогові значення еталонної змінної перетворювача (виникають при балансуванні для порівняння напруг на входах внутрішнього компаратора). Графік 24, показує наступне аналогово-цифрового перетворення відображення фізичної величини з виходу першого із давачів означеної "трійки", що відповідає початку нового періоду для циклу виміру визначеного параметра. Як видно з графіків перших трьох епюр на фіг. 5 початок процесів порозрядного "зважування" 22 та 23 відповідно виконувані вимірювальними перетворювачами, що приєднані у двох інших мікропроцесорних вузлах 6, які також досліджують визначений технологічний параметр, зсунуто у часі відповідно на одну та дві третини періоду вимірювання відносно початку перетворення у першому з них як у стартовому. Таким розподілом моментів початку "зважування" (балансування кожного вимірювального перетворювача) досягнуто те, що отримані в результаті аналогово-цифрового перетворення кодовані двійкові відліки 25, 26 та 27 відповідають рознесеним у часі (але розташованим в межах одного вимірювального періоду) ординатам відображень поточних значень на епюрі 20 (тут умовно цифрові коди показані вузькими прямокутниками різної висоти пропорційно вимірюваному значенню). Це стосується і відліку 28, що є наступним за відліком 25, який надходить від першого в цій "трійці" перетворювача. 9 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 В разі жорсткої синхронізації роботи вимірювальних перетворювачів 2, задіяних для співпадаючих у часі відображень досліджуваного параметра за допомогою однієї змінної фізичної величини, ординати 26 та 27 показів другого та третього перетворювачів в одній "трійці" за весь період будуть практично однакові зі значенням 25 (вони співпадають із точністю до амплітуди випадкової складової в однакових фізичних сигналах на входах "трійки" давачів). В цьому разі графік відновленої по цифрових даних для подальшого аналізу якості додержання режиму об'єкта – епюра досліджуваної змінної для цього параметра має вигляд прямої 29, а значить на супервізорному рівні системи не буде виявлено ніяких (!) відхилень. Відповідно даному технічному рішенню застосовано часовий зсув в межах одного періоду циклічного виміру параметра для моментів вимірів у конструктивно задіяних в підсистемах трьох окремих давачів для відображення однієї змінної з трьома незалежними швидкодіючими вимірювальними перетворювачами. Плавна крива лінія 20 на епюрі в такому разі за час протяжності одного періоду є дослідженою у трьох різних точках з отриманням відповідно трьох незалежних вимірів, відображених цифровими кодами 25, 26 та 27 для їх ординат. Відновлений на супервізорному рівні на підставі окремих та не співпадаючих у часі на величину встановленого зсуву цих цифрових вимірів графік для досліджуваної змінної цього параметра представлено тепер відповідними відрізками 30, 31 та 32, що не складаються в одну пряму, бо з більшою деталізацією передають характер фізичного процесу. Це однозначно сигналізує про виявлене відхилення, і наявність в режимі не монотонного зростання величини досліджуваного параметра (аперіодичний процес), а деякий коливальний процес, що має абсолютне відхилення 33 як різницю в ординатах 25 та 26. Саме амплітуда 33 відхилення і є мірою можливої втрати динамічної точності при спрощеному процесі вимірювань, а також кількісним показником амплітудно-часової роздільної здатності інформаційно-вимірювальної системи. Очевидно, що застосування трьох комплексів "давач-вимірювальний перетворювач", працюючих незалежно з однією змінною, але з визначеним синхронним зсувом у часі в межах періоду вимірювань, додає майже подвійне збільшення амплітудно-часової роздільної здатності в разі, коли стала часу давача, процес аналогово-цифрового перетворення ("зважування") та період вищої гармонійної складової нестаціонарного досліджуваного процесу змін параметра є близькими за величиною. На відміну від прототипу, де передбачено розміщення трьох давачів 1 в одній вимірювальній зоні для забезпечення однаковості умов взаємодії з фізичним середовищем, а вимірювальних перетворювачів з відповідними мікропроцесорними вузлами на різних функціональних рівнях однієї інформаційно-вимірювальної системи, згідно з даною пропозицією означена "трійка" давачів 1 можуть бути приєднаними до вимірювальних перетворювачів мікропроцесорних вузлів взагалі у різних підсистемах 7 та 8 чи навіть в межах усієї гіперсистеми там, де це буде визнано доцільним із конструктивних міркувань. Досконала за технічними показниками форма об'єднання підсистем в комплексну систему та при нарощуванні кількості підсистем у гіперсистему гарантує виключно високу якість дотримання синхронності відтворення окремих квантів системного часу у всіх мікропроцесорних вузлах, відносно яких визначено всі моменти відліків (початок процесів "зважування"), бо і сам процес передачі системних синхросигналів є гарантовано безперервним. А це означає, що як і у прототипі в межах окремих рівнів, так і комплексній інформаційно-вимірювальної системі, три вимірювальних перетворювача, що задіяні на різних функціональних рівнях, але тут вже в різних підсистемах в межах їх окремих рівнів, виконують акти вимірів у чітко визначені моменти протягом одного й того ж самого вимірювального періоду. Тобто ординати 25-27 є сформованими та зафіксовані не тільки різними мікропроцесорними вузлами 6 як системними пристроями, а ще і як складаючими частинами різних підсистем, де можуть оброблятися всі усуспільнені поточні дані за різними методиками та програмними реалізаціями алгоритмів для отримання найвищого за показником якості результату спостереження та регулювання параметрів задіяних технологічних засобів на об'єкті. Згідно з цим технічним рішенням мікропроцесорні вузли 6 зв'язані з давачами 1, а ті у свою чергу розподілені таким способом по трьох функціональних рівнях, що блоки кодів, які формують цифрове відображення змін будь-якого одного фізичного параметра досліджуваного об'єкта в аналоговій формі практично одночасно зафіксовано у цифрових кодах на всіх цих рівнях, і таке відображення кожного разу з актом вимірювання виконано у встановленій часовій послідовності (з урахуванням мінімальної затримки на ретрансляцію кодів у межах одного кластера), і воно зберігається щонайменше у дев'яти запам'ятовуючих пристроях мікропроцесорних вузлів 6 завдяки каналам 5 міжвузлових зв'язків. Цим досягнуто гарантоване дублювання даних вимірювання як по незалежних джерелах інформації про взаємодію з досліджуваним фізичним середовищем (три давачі в одній зоні дії фізичної змінної), так і по отриманню й фіксації сформованих масивів цифрових кодів (дев'ять реплік цифрових кодів 10 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 одного виміру із наперед заданими мінімальними часовими розбіжностями їх формування та запрограмованим взаємним часовим зсувом). Отримані на найвищому рівні досконало сформовані (алгоритмічно фільтровані та синхронізовані в часі з урахуванням кількості актів ретрансляції каналами 5, 9, 10 та 11, які було виконано для просування кожного з поточних кадрів, ці дані стають основою для оновлення елементів кінцевого масиву остаточно верифікованих цифрових відображень параметрів в реальному часі роботи обслуговуваного об'єкта. Таке відбувається в межах кожної з підсистем, які складають комплексну інформаційновимірювальну систему або ж гіперсистему. На цьому етапі формування загальної інформаційної картини досліджуваного об'єкта інформація від всього парку задіяних давачів ще є фрагментованою за їх типом (окрема підсистема може мати тільки теплові чи тільки механічні давачі, наприклад, переміщення, тиску, акустичних коливань тощо, або ж тільки набір електроенергетичних давачів-перетворювачів: напруги, поточної величини струму, потужності та якості навантаження тощо) і тому лише частково відображати дійсний стан об'єкта в цілому. Для логічного об'єднання інформаційних потоків від підсистем без ризику їх ураження у випадках проявів технічної недосконалості апаратних засобів супервізорного рівня сформовано кластер мікропроцесорних вузлів 12, що з'єднані каналами 13 міжвузлових зв'язків. По цих каналах кожна пара мікропроцесорних вузлів 12 періодично обмінюється між собою інтерфейсними сигналами, оновлюючи накопичені дані, що передбачено діючими фрагментами загальної програми актуалізації поточних даних. Таким чином протягом програмно встановленого інтервалу часу в запам'ятовуючих пристроях усіх трьох мікропроцесорних вузлів 12 постійно існує та закономірно оновлюється масив реплікованих даних, що характеризує вже повний загальний стан досліджуваного об'єкта. Оновлення даних, що направляються для кожної пари мікропроцесорних вузлів 12, відбувається шляхом їх реплікації з одного із запам'ятовуючих пристроїв мікропроцесорного вузла 6 кластера верхнього рівня кожної з підсистем паралельно через канали 14 та 15 (чи 18 та 19 в разі гіперсистеми), приєднаних до цього вузла. Виходячи з того, що мікропроцесорні вузли 6 кластерів верхнього рівня кожної з підсистем в нормальних умовах функціонування комплексної інформаційно-вимірювальної системи мають дубльовані й рівнозначні дані, їх циркуляція між мікропроцесорними вузлами встановлена як рівно періодична (циклічна з однаковими інтервалами оновлення). В умовах ушкодження будь-якого з каналів 5 або 13 міжвузлових зв'язків, їх роль у реплікації даних перебирають на себе канали 14 та 15, завантаженість яких відповідно зростає. Активовані керуючі фрагменти загальної програми оновлення даних, що стосуються компенсації втрати ресурсу через відсутність провідності кількох каналів 5 або 13, відповідно переадресують оновлені фрагменти інформаційних масивів через найменш завантажену пару каналів 14 та 15, а інші пари таких каналів резервують інформаційний рух в межах кластерів, де виявлено прояви хибних дій. Відмова в функціонуванні або ж відімкнення з технічних причин будь-якого з мікропроцесорних вузлів 6 або 12 є більш важким за наслідками ушкоджуючим процесом для комплексної інформаційно-вимірювальної системи, бо це паралізує дію одразу чотирьох каналів міжвузлових зв'язків. В разі відмови одного, а тим більше двох мікропроцесорних вузлів на супервізорному рівні у нерезервованій комплексній системі, таке викликає фактично повний крах цього виробу як інформаційно-вимірювальної системи з втратою частини даних (один відмовний вузол) або ж повна втрата спостережливості об'єкта при блокуванні роботи двох і більше мікропроцесорних вузлів. Резервована центральна частина комплексної інформаційно-вимірювальної системи, що побудована згідно із заявленим технічним рішенням, має значний активний ресурс для безперервної роботи і не втрачає дієздатності, навіть коли в. її "ядрі" на супервізорному рівні будуть виведені з ладу одночасно шість (!) і залишаться працюючими лише три мікропроцесорних вузли (наприклад, тільки крайні праві вузли 6, 12, 6, показані на фіг. 3). Таке може статися через послідовні відмови мікропроцесорних вузлів в разі їх тимчасового "перевантаження" і супроводжується блокуванням відповідних приєднаних до них каналів 5, 13, 14, 15 міжвузлових зв'язків. Висока "живучість" є необхідною умовою досягнення гарантованої продуктивності "ядра" комплексної інформаційно-вимірювальної системи, але ця ж властивість дозволяє (як і у прототипу в конструкціях складаючих "підсистем) на етапі виготовлення починати процес розгортання та "пробний" запуск з тестуванням базових програм обробки даних, встановивши в комплексній системі лише по одному каналу зв'язку між мікропроцесорними вузлами 6 та 12, а потім відімкнувши їх виконати тестування кількох інших, що передбачені конструкцією. Створена згідно з цим технічним рішенням інформаційновимірювальна гіперсистема зберігає властивості глибокого резервування апаратних засобів та 11 UA 111957 C2 5 10 15 20 25 30 35 40 45 50 55 60 багаторазової реплікації даних, що оновлюються послідовною циклічною заміною цифрових кодів більш новими вимірами. Таке дозволяє навіть при "глобальному збої" у всіх мікропроцесорах супервізорного рівня (наприклад, на деякий короткий час аварійного відключення для перемикання живлення системи з основного на резервне джерело) повністю відновити послідовність надходження цифрових кодів вимірів, бо їх репліки за цей невеликий період часу є розміщеними в різних запам'ятовуючих пристроях, що належать чотирнадцяти мікропроцесорним вузлам 6, 12, 16 та 17 у встановленому певному порядку і з атрибутами часу формування й оновлення. Мікропроцесори 12, 16, 17 та можливо інші аналогічні, що утворюють із супервізорних кластерів "ядро" інформаційно-вимірювальної системи, разом складають апаратно-технічну базу для побудови досить потужної обчислювальної системи супервізорного рівня, що може мати своє специфічне завантаження завданнями діагностичного та прогностичного характеру як відносно до обслуговуваного об'єкта (досконале багатосторінкове відображення режимів на екранах із вкладеними деталізованими діаграмами; формування баз даних і прогнозів оптимальних режимів тощо), так і відносно до самої гіперсистеми для поліпшення довгострокового дотримання найвищого рівня метрологічних параметрів шляхом адаптивної компенсації виявлених систематичних складових похибок і динамічної фільтрації випадкових складових вимірів, які в реальних умовах промислового використання можуть досягати неочікувано великих значень, помітно вищих порівняно з конструктивно розрахунковими за класом точності. Усі виміри реального часу, відповідним чином атрибутовані за локалізацією давачів 1, що їх надіслали, та загальним відліком системного часу і типовим режимом обслуговуваного об'єкта, мають бути використані для формування досконалої цифрової моделі обслуговуваного об'єкта та вироблення поточних керуючих дій, спрямованих на дотримання найменшого відхилення від розрахункової траєкторії руху змін його оптимізованих параметрів. На підставі періодичного порівняння великого масиву даних вимірювань, отриманих від швидкодіючих давачів та вимірювальних перетворювачів з даними цієї моделі у будь-якому технічно обґрунтованому масштабі часових інтервалів стає можливим виявити найменші прояви негативної динаміки у змінах фактичного технічного стану обслуговуваного об'єкта (наприклад, технологічного обладнання). Висока часова роздільна здатність та гарантовані метрологічні характеристики резервованої комплексної інформаційно-вимірювальної системи забезпечують своєчасність та адекватність дій, спрямованих на усунення виявлених відхилень, і надають можливість довгий час утримувати як безпечний режим обладнання, так і високу якість продукції, що воно виробляє. Бібліографічні дані джерел інформації 1. ІЕЕЕ-488.1. Standard Digital Interface for Programmable Instrumentation. 2. IEC-625. General Purpose Interface Bus (GPIB), (стандарт МЭК 625.1) 3. ГОСТ 26.003-80. Система интерфейса для измерительных устройств с байтпоследовательным, бит-параллельным обменом информацией, "Многопроводный магистральный канал общего пользования". 4. ІЕС/ІЕЕЕ Standard for Higher Performance Protocol for the Standard Digital Interface for Programmable Instrumentation-Part 1: General (Adoption of IEEE Std 488.1-2003). 5. EUR 4600E. CAMAC. Organization on Multicrate System. Specification of the Branch Highway and CAMAC Grate Controller "Type A". ESONE Committee, 1972. 6. ГОСТ 26.201-80. Система КАМАК. Крейт и сменные блоки. Требования к конструкции и интерфейсу. 7. Трехциньский Р. Система САМАС и ее применение. Новости ИАИ № 3 (32), 1980, с. 8-14. 8. Система сбора данных и управления с интерфейсами USB 2.0 и Ethernet (TCP/IP), Крейтовая система LTR (http://www.lcard.ru/ltr.php3). 9. Универсальная система сбора данных EDX-100A (http://www.nko-kazan.ru/katalog/sistemysbora-dannyh/sistemy-sbora-dannyh-proizvoditel-kyowa-japonija/universalnaya-sistema-sboradannyih-edx-100a-sistema-sertifitsi.html). 10. Система сбора данных и коммутации 34970А (Agilent Technologies) (http://www.astena.ru/34970a.html). 11. Мирский Г.Я. Микропроцессоры в измерительных приборах, Радио и связь, 1984. - 160 с. ил. (стр. 50, 92). 12. Шлет М. Тенденции индустрии встроенных микропроцессоров // Открытые системы. 1998. № 6. 13. Крюков В.В. Информационно-измерительные системы, Учебное пособие. Владивосток. ВГУЭС, 2001. 201 с. стр. 9, рис. 1.1) (IISBook.pdf). 12 UA 111957 C2 5 10 15 20 25 14. О.Н. Пьявченко, А.Е. Панин, Е.А. Мокров, Принципы построения и архитектура перспективных информационно-измерительных систем мониторинга, диагностики и управления на базе интеллектуальных датчиков УДК 621.3.049.77+681.586. (http://www.microsystems.ru/files/publ/492.htm). 15. Теорія інформації (інформаційно-вимірювальні системи, похибки, ідентифікація): навчальний посібник / П.Д. Стухляк, О.В. Іванченко, А.В. Букетов, Μ.А. Долгов. - Херсон: Айлант, 2011. - 371 с. 16. Система сбора данных M-Bus (производитель: Hydrometer). (http://antap.com.ua/index.php?p1=products&p2=supplier&vendor=Hydrometer&i d=mbus_hydrometer). 17. "Система сбора информации телеметрическая (ССИТ) ИНДЕЛ)": Изделие (сертификат № 1/5500-2) изготавливается согласно ТУ РБ 14590353.001-99 (www.indel.by/ru/tele/telemindel). 18. Автоматизированная система комплексного контроля и учета энергоресурсов ПТК "ЛучТС". (http://lmt.ifmo.ru/index.php/infrastructure 1/102-ascue). 19. Мобильная измерительная система для проведения гарантийных испытаний турбоустановок //Разработки /Контрольно-измерительные системы, СТА 3/2003. http://www.cta.ru. 20. Программно-технический комплекс "ТОРНАДО". http://www.k-energo.com/?id= 21514&mode=prod. 21. Чичёв С.Ив., Калинин В.Ф., Глинкин Е.Ив. Информационно-измерительная система центра управления электрических сетей, Москва, Машиностроение. - 2009. 111 ст. с ил., (glinkin_h. pdf). 22. Патент РФ № 2439500 МПК G01D7/00 (2006.01) Универсальный модуль информационно-измерительной системы (http://www.findpatent.ru/patent/243/2439500.html). 23. Заявка на отримання патенту України № А201214691, МПК G01D21, Інформаційновимірювальна система (Авт.: Манжело В.О., Конельский Вол. Ан., Конельский Вік. Ан.), дата подання заявки 21.12.2012 р. ФОРМУЛА ВИНАХОДУ 30 35 40 Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для кожного з цих рівнів, з'єднані каналами (5) міжвузлових зв'язків по три в одному кластері, яка відрізняється тим, що має дві окремі підсистеми, а мікропроцесорні вузли (6) кластерів верхнього рівня кожної з підсистем підключені до додаткових трьох мікропроцесорних вузлів (12), з'єднаних каналами міжвузлових зв'язків (13), які утворюють додатковий спільний для цих підсистем кластер супервізорного рівня, при цьому кожний мікропроцесорний вузол (6) кластера верхнього рівня будь-якої з підсистем підключено каналами міжвузлових зв'язків (14 та 15) до двох суміжних мікропроцесорних вузлів (12) кластера супервізорного рівня. 13 UA 111957 C2 14 UA 111957 C2 15 UA 111957 C2 16 UA 111957 C2 17 UA 111957 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 18
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01D 21/00
Мітки: система, інформаційно-вимірювальна
Код посилання
<a href="https://ua.patents.su/20-111957-informacijjno-vimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Інформаційно-вимірювальна система</a>
Інформаційно-вимірювальна система для контролю якості мінеральної сировини
Номер патенту: 73792
Опубліковано: 10.10.2012
Автори: Ахтямов Олексій Сергійович, Кознін Ігор Миколайович, Азарян Альберт Арамаісович, Дрига Володимир Володимирович, Карачабан Андрій Сергійович
МПК: G06Q 50/02
Мітки: якості, інформаційно-вимірювальна, сировини, мінеральної, система, контролю
Формула / Реферат:
Інформаційно-вимірювальна система для контролю якості мінеральної сировини, що містить датчики, які через свої аналого-цифрові перетворювачі з'єднані з входами мікропроцесора, реєстратор та передавач, яка відрізняється тим, що оснащена послідовно з'єднаними формувачем пакета даних, передавачем та приймачем даних, обчислювачем, блоком відображення даних, блоком зберігання даних, передавачем, який має зв'язок з приймачем стаціонарного...
Інформаційно-вимірювальна система
Номер патенту: 111941
Опубліковано: 11.07.2016
Автори: Манжело Валерій Олександрович, Конельський Володимир Анатолійович, Конельський Віктор Анатолійович
МПК: G01D 21/00
Мітки: система, інформаційно-вимірювальна
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, яка відрізняється тим, що мікропроцесорні вузли (6) розподілені на окремі функціональні рівні системи і в межах...
Інформаційно-вимірювальна система для гідрогеологічних свердловин
Номер патенту: 54528
Опубліковано: 10.11.2010
Автори: Азарян Альберт Арамаісович, Дрига Володимир Володимирович, Цибулевський Юрій Євгенович
МПК: G01F 23/00
Мітки: інформаційно-вимірювальна, система, свердловин, гідрогеологічних
Формула / Реферат:
Інформаційно-вимірювальна система для гідрогеологічних свердловин, що містить датчики температури та мінералізації води, які через свої АЦП з'єднані з входами мікропроцесора, вихід якого через радіопередавач з'єднано з реєструючим пристроєм, яка відрізняється тим, що вона обладнана блоком керування живленням системи і датчиком контакту корпуса зонда з водою, виходи якого з'єднано з командним входом мікропроцесора і блоком керування живленням...
Лазерна інформаційно-вимірювальна система
Номер патенту: 23214
Опубліковано: 10.05.2007
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: система, лазерна, інформаційно-вимірювальна
Формула / Реферат:
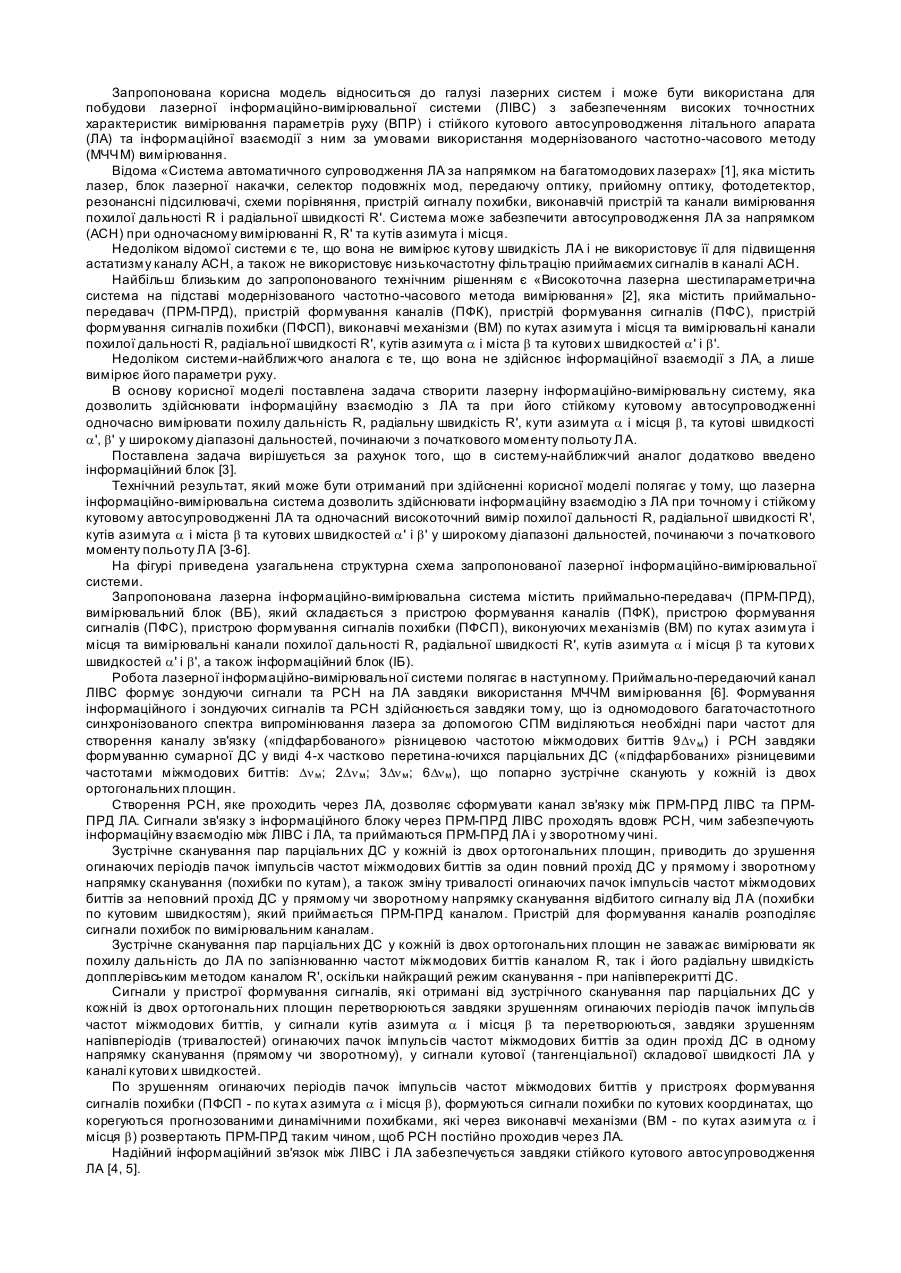
Лазерна інформаційно-вимірювальна система, що містить приймач-передавач (ПРМ-ПРД), пристрій формування каналів, пристрій формування сигналів, пристрій формування сигналів похибки, виконавчі механізми по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що додатково після ПРМ-ПРД введений інформаційний...
Інформаційно-вимірювальна система обліку витрат газу
Номер патенту: 53539
Опубліковано: 15.01.2003
Автори: Бестелесний Андрій Григорович, Петришин Ігор Степанович
МПК: G01F 13/00, G01F 3/00, G01F 22/00
Мітки: витрат, інформаційно-вимірювальна, обліку, газу, система
Формула / Реферат:
Інформаційно-вимірювальна система обліку витрат газу, що містить лічильник газу і обчислювач з вхідними каналами для вимірювання тиску та температури газу, яка відрізняється тим, що додатково містить вихідний редуктор та вхідний регулятор тиску, які утворюють разом з обчислювачем і лічильником за заданими алгоритмами систему керування зі зворотним зв'язком.
Попередній патент: Двокамерний наповнений шприц і шприц, наповнений арипіпразолом
Наступний патент: Пересувний комплекс для бджільництва т.і. стругая і спосіб ведення бджільництва
Випадковий патент: Спосіб діагностики розвитку атеросклерозу