Гідроакустичний пристрій моніторингу морських трубопроводів
Номер патенту: 62453
Опубліковано: 25.08.2011
Автори: Фалєєв Ігор Михайлович, Халілов Едуард Магеррамович, Ковальчук Костянтин Володимирович, Меленко Юрій Ярославович, Зацерковський Руслан Олексійович




Формула / Реферат
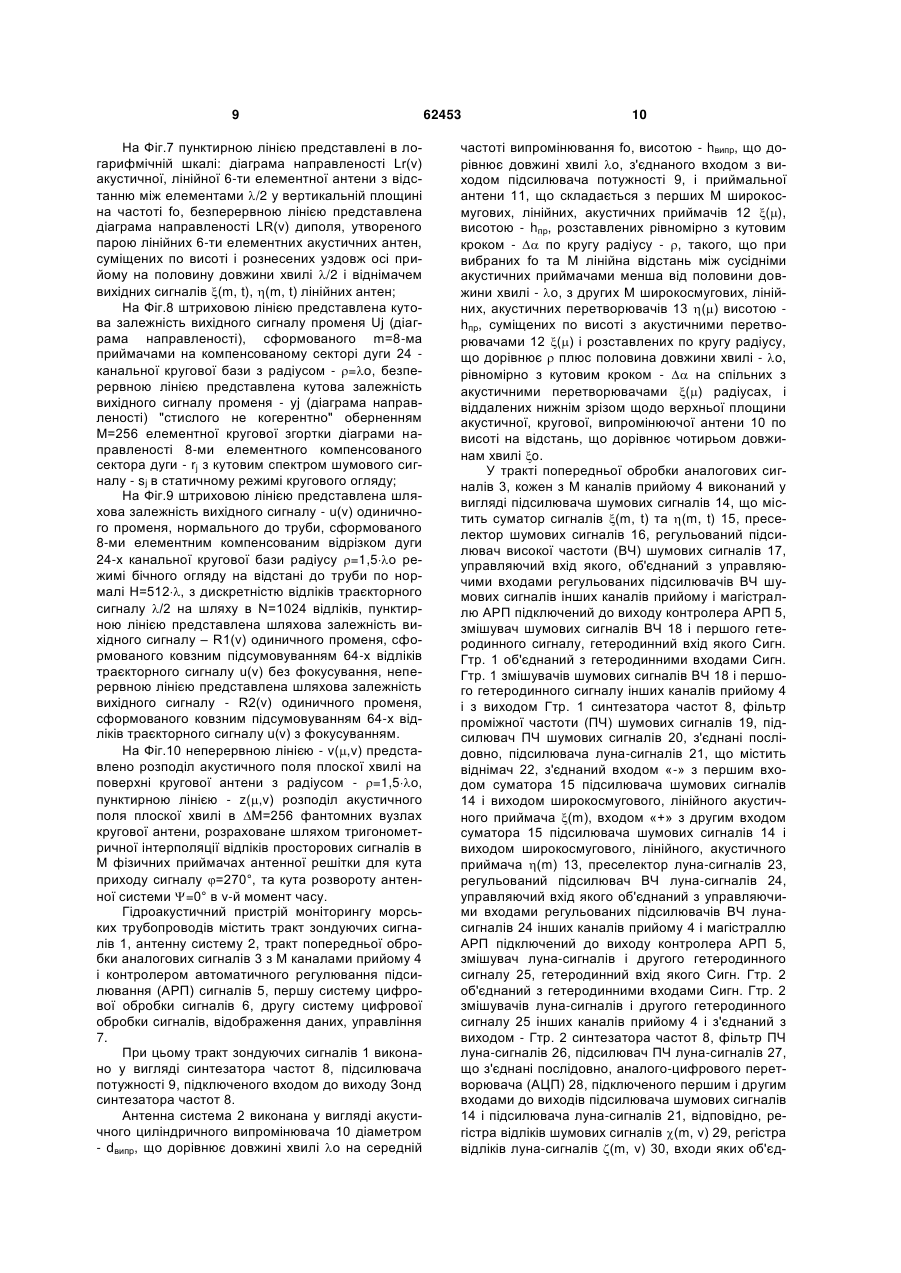
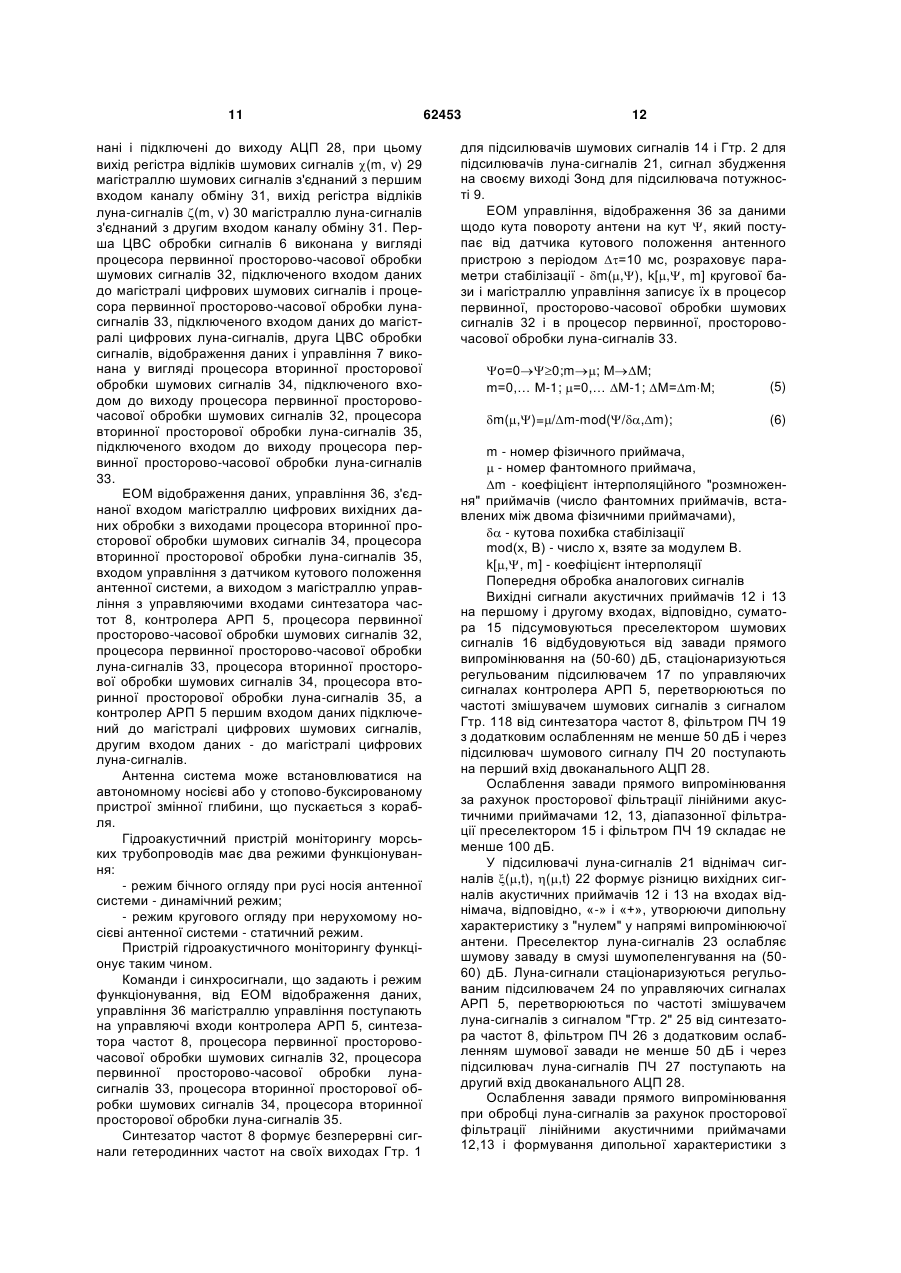
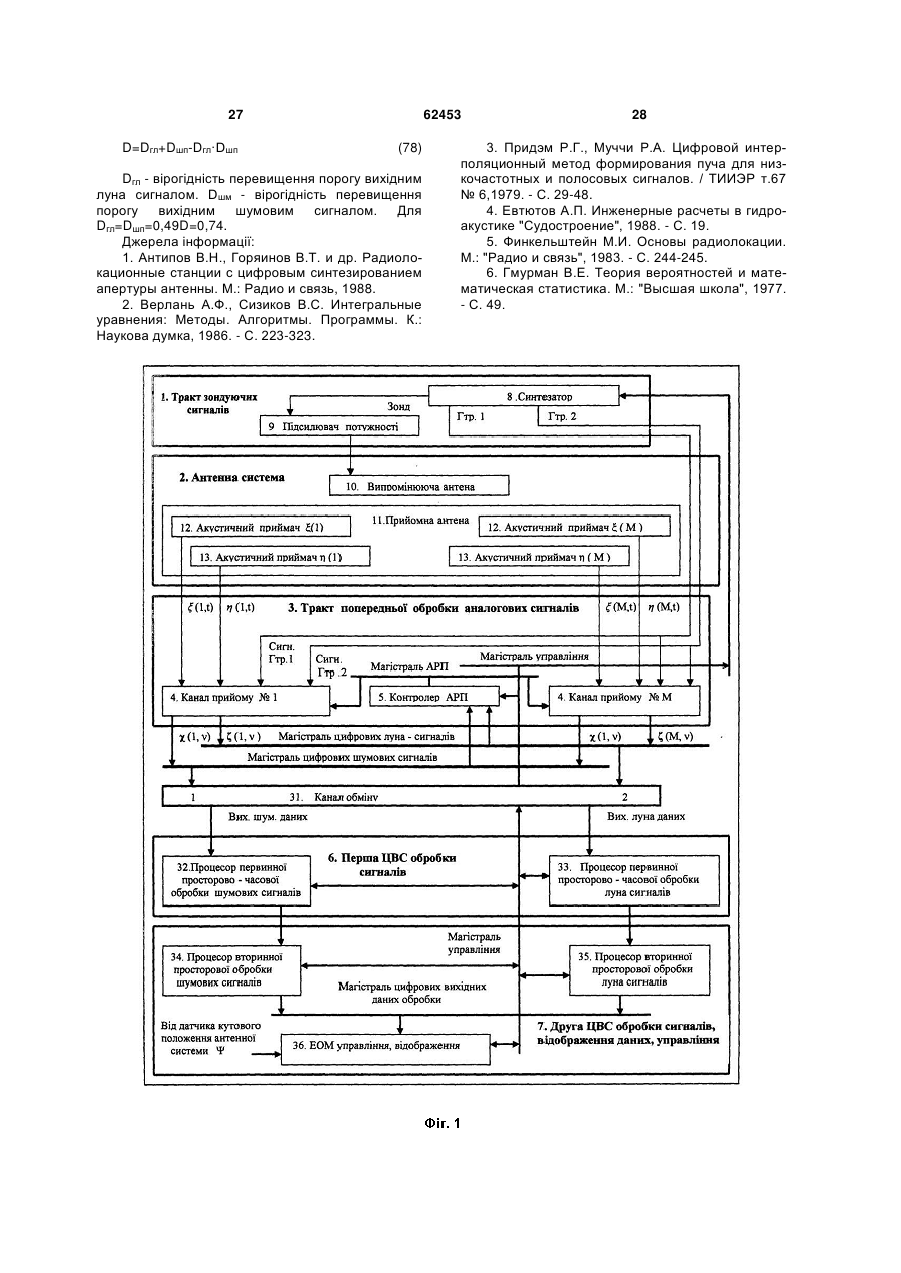
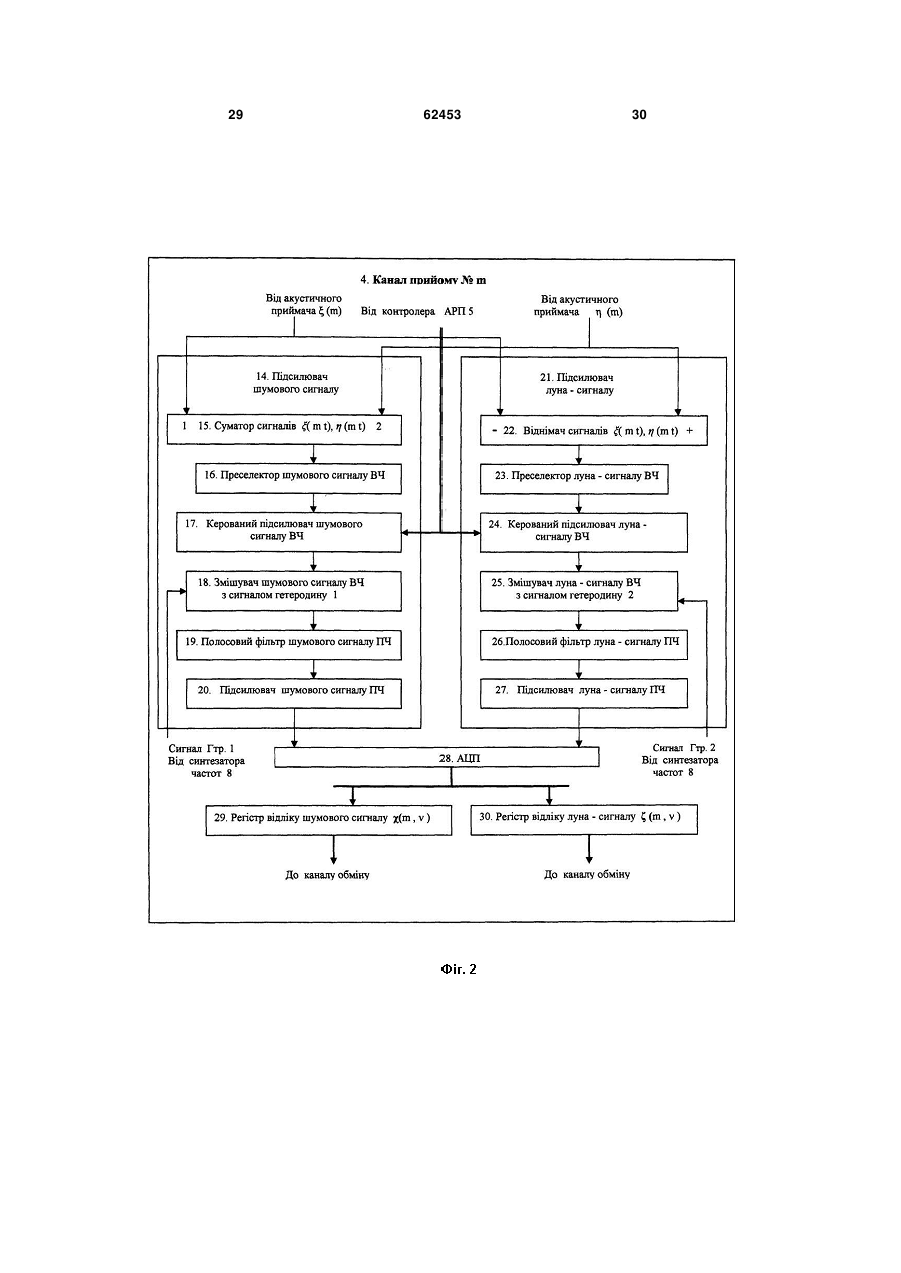
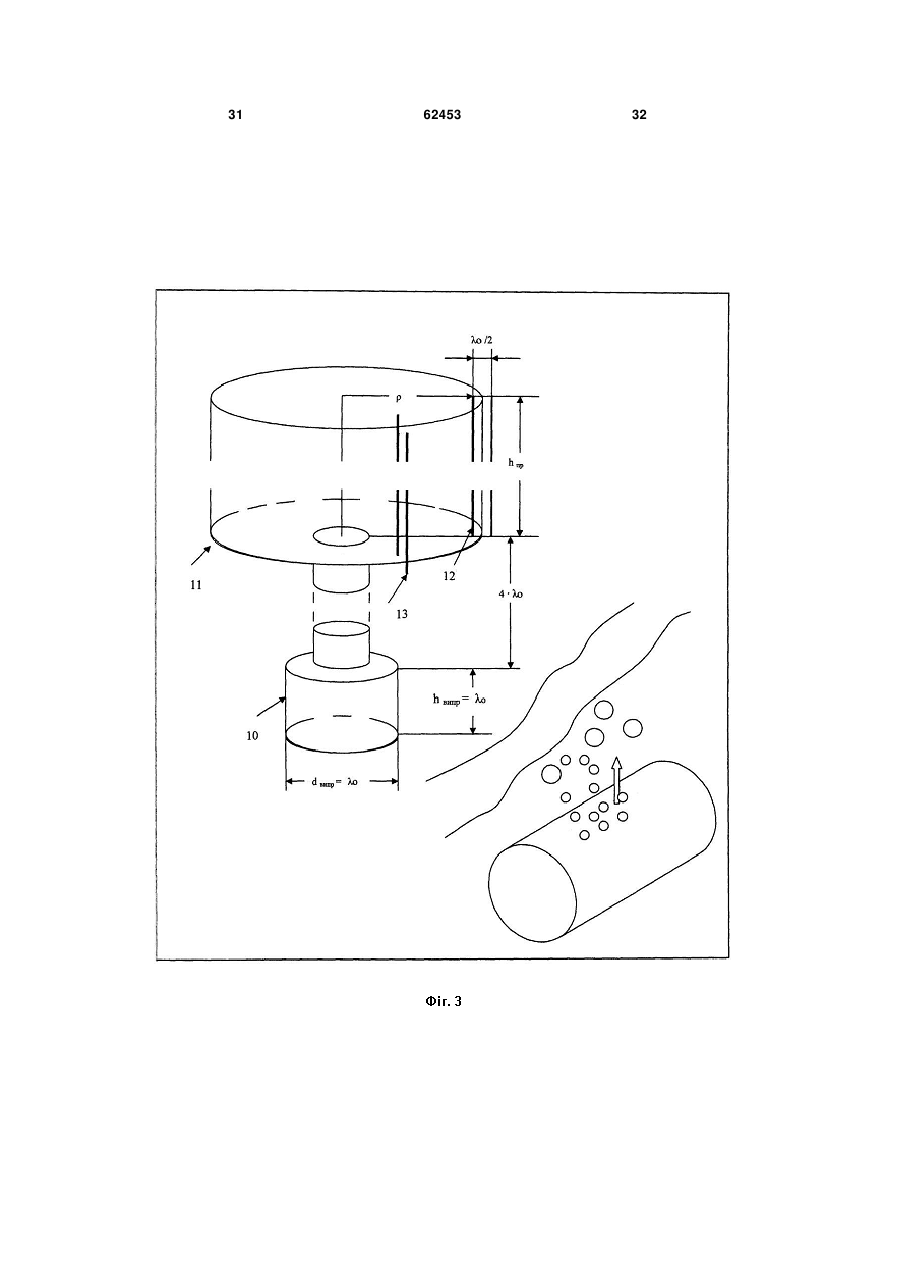
Гідроакустичний пристрій моніторингу морських трубопроводів, що включає тракт зондуючих сигналів, антенну систему, тракт попередньої обробки аналогових сигналів з М-каналами прийому і контролером автоматичного регулювання підсилювання (АРП), першу цифрову обчислювальну систему (ЦОС) обробки сигналів, другу ЦОС обробки сигналів, відображення, управління, який відрізняється тим, що тракт зондуючих сигналів виконано у вигляді синтезатора частот, підсилювача потужності, підключеного входом до виходу Зонд синтезатора частот, антенна система виконана у вигляді співвісних акустичного, кругового випромінювача, діаметром - dвипр, що дорівнює довжині хвилі - lо на середній частоті випромінювання - fo, висоті - hвипр, що дорівнює довжині хвилі - lо, з'єднаного входом з виходом підсилювача потужності прийомної, кругової антени, що складається з перших М широкосмугових, лінійних, акустичних приймачів x(m) висотою - hпр, розставлених рівномірно з кутовим кроком - Da по кругу радіусу - r такого, що при вибраних fo та М лінійна відстань між сусідніми акустичних приймачами менша від половини довжини хвилі - lo, других М широкосмугових, лінійних, акустичних перетворювачів h(m) висотою - hпp, суміщених по висоті з акустичними перетворювачами x(m) і розставлених по кругу радіусу, що дорівнює r плюс половина довжини хвилі - lо, рівномірно з кутовим кроком - Da на спільних з акустичними перетворювачами x(m) радіусах, і віддалених нижнім зрізом щодо верхньої площини акустичної, кругової, випромінюючої антени по висоті на відстань - z, що дорівнює чотирьом довжинам хвилі lo, при цьому у тракті попередньої обробки аналогових сигналів кожен з М каналів прийому виконано у вигляді підсилювача шумових сигналів, який виконано у вигляді суматора сигналів x(m, t) та h(m, t), преселектора шумових сигналів, регульованого підсилювача високої частоти (ВЧ) шумових сигналів, управляючий вхід якого, об'єднано з управляючими входами регульованих підсилювачів ВЧ шумових сигналів інших каналів прийому і магістраллю АРП підключений до виходу контролера АРП, змішувача шумових сигналів ВЧ і першого гетеродинного сигналу, гетеродинний вхід якого Сигн. Гтр. 1 об'єднано з гетеродинними входами Сигн. Гтр. 1 змішувачів шумових сигналів ВЧ і першого гетеродинного сигналу інших каналів прийому і з'єднаний з виходом Гтр. 1 синтезатора частот, фільтру проміжної частоти (ПЧ) шумових сигналів, підсилювача ПЧ шумових сигналів, з'єднаних послідовно, підсилювача луна-сигналів, виконаного у вигляді віднімача, з'єднаного входом «-» з першим входом суматора підсилювача шумових сигналів і виходом широкосмугового, лінійного, акустичного приймача x(m), входом «+» - з другим входом суматора підсилювача шумових сигналів і виходом широкосмугового, лінійного, акустичного приймача h(m), преселектора луна-сигналів, регульованого підсилювача ВЧ луна-сигналів, управляючий вхід якого об'єднаний з управляючими входами регульованих підсилювачів ВЧ луна-сигналів інших каналів прийому і магістраллю АРП підключений до виходу контролера АРП, змішувача луна-сигналів і другого гетеродинного сигналу, гетеродинний вхід якого Сигн. Гтр. 2 об'єднаний з гетеродинними входами Сигн. Гтр. 2 змішувачів луна-сигналів і другого гетеродинного сигналу інших каналів прийому і з'єднаний з виходом Гтр. 2 синтезатора частот, фільтру ПЧ луна-сигналів, підсилювача ПЧ луна-сигналів, з'єднаних послідовно, аналого-цифрового перетворювача (АЦП), підключеного першим і другим входами до виходів підсилювача шумових сигналів і підсилювача луна-сигналів, відповідно, регістра відліків шумових сигналів c(m, v), регістра відліків луна-сигналів z(m, v), входи яких об'єднані і підключені до виходу АЦП, при цьому вихід регістра відліків шумових сигналів c(m, v) магістраллю шумових сигналів сполучений з першим входом каналу обміну, вихід регістра відліків луна - сигналів z(m, v) магістраллю луна-сигналів сполучений з другим входом каналу обміну, крім того, перша ЦОС виконана у вигляді процесора первинної просторово-часової обробки шумових сигналів, підключеного входом даних до виходу цифрових шумових сигналів каналу обміну і процесора первинної просторово-часової обробки луна-сигналів, підключеного входом даних до виходу цифрових луна-сигналів каналу обміну, друга ЦОС виконана у вигляді процесора вторинної просторової обробки шумових сигналів, підключеного входом до виходу процесора первинної просторово-часової обробки шумових сигналів, процесора вторинної просторової обробки луна-сигналів, підключеного входом до виходу процесора первинної просторово-часової обробки луна-сигналів, ЕОМ управління, відображення даних, з'єднаної входом даних магістраллю цифрових вихідних даних обробки з виходами процесора вторинної просторової обробки шумових сигналів, процесора вторинної просторової обробки луна-сигналів, входом управління з датчиком кутового положення антенної системи, а виходом з магістраллю управління з управляючими входами синтезатора частот, контролера АРП, процесора первинної просторово-часової обробки шумових сигналів, процесора первинної просторово-часової обробки луна-сигналів, процесора вторинної просторової обробки шумових сигналів, процесора вторинної просторової обробки луна-сигналів.
Текст
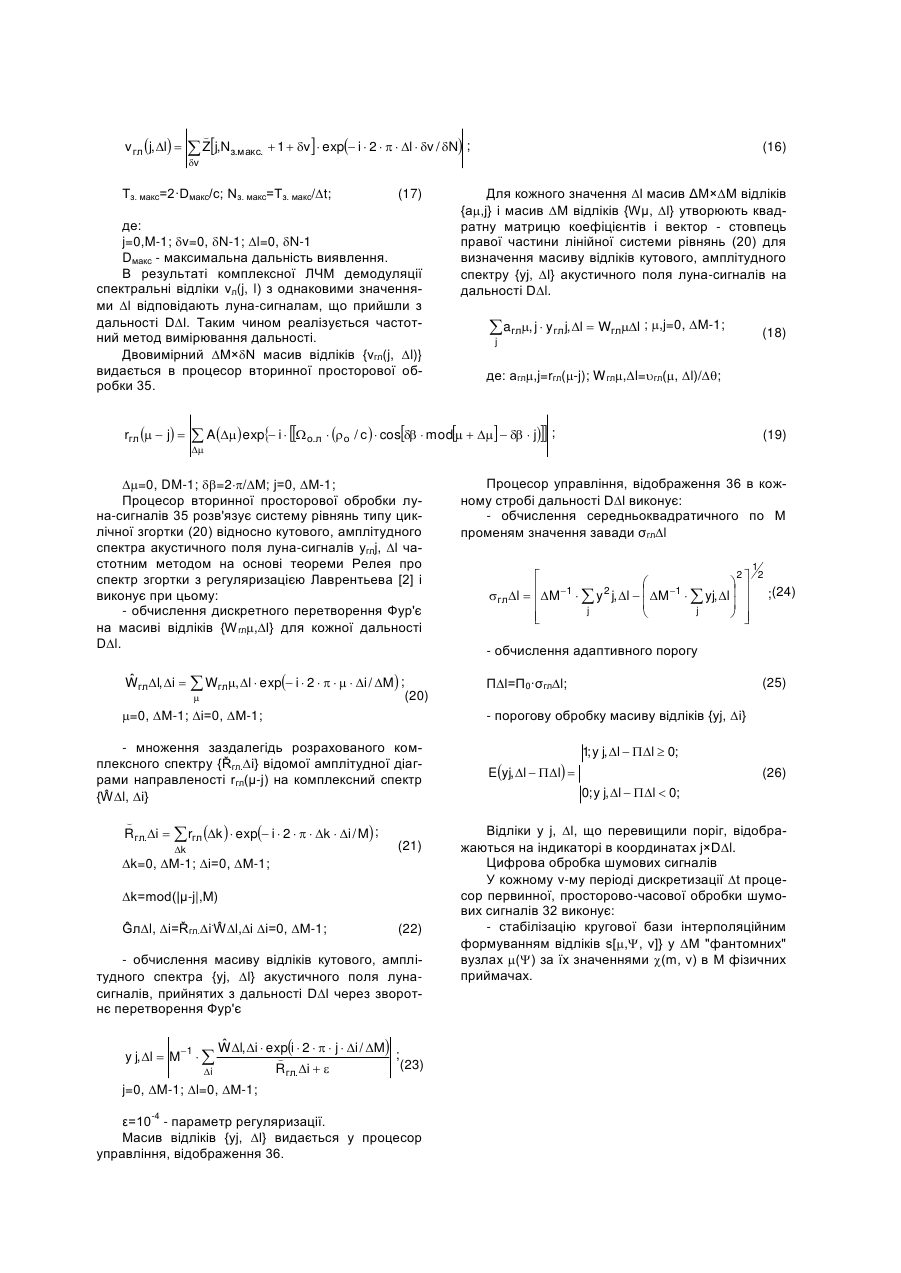
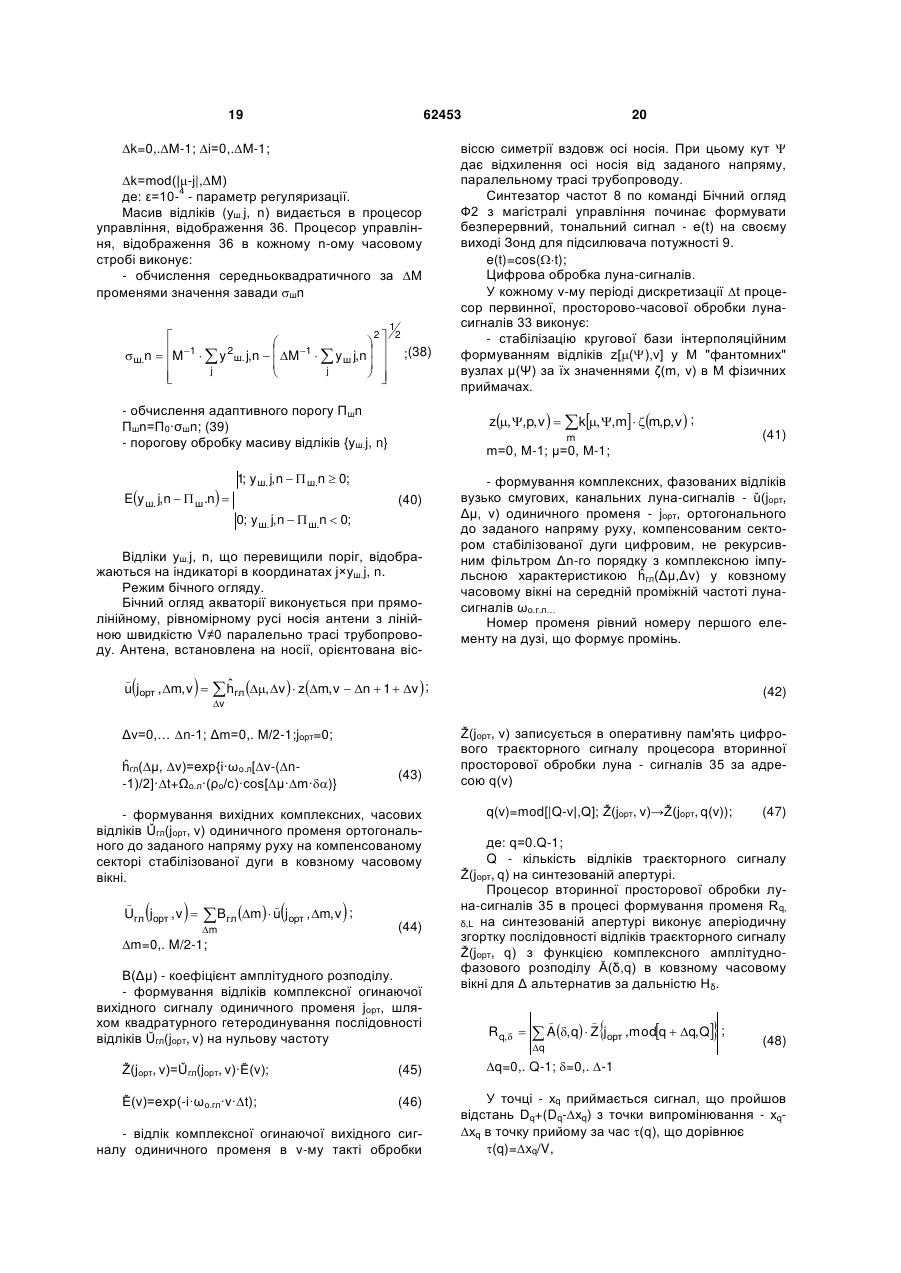
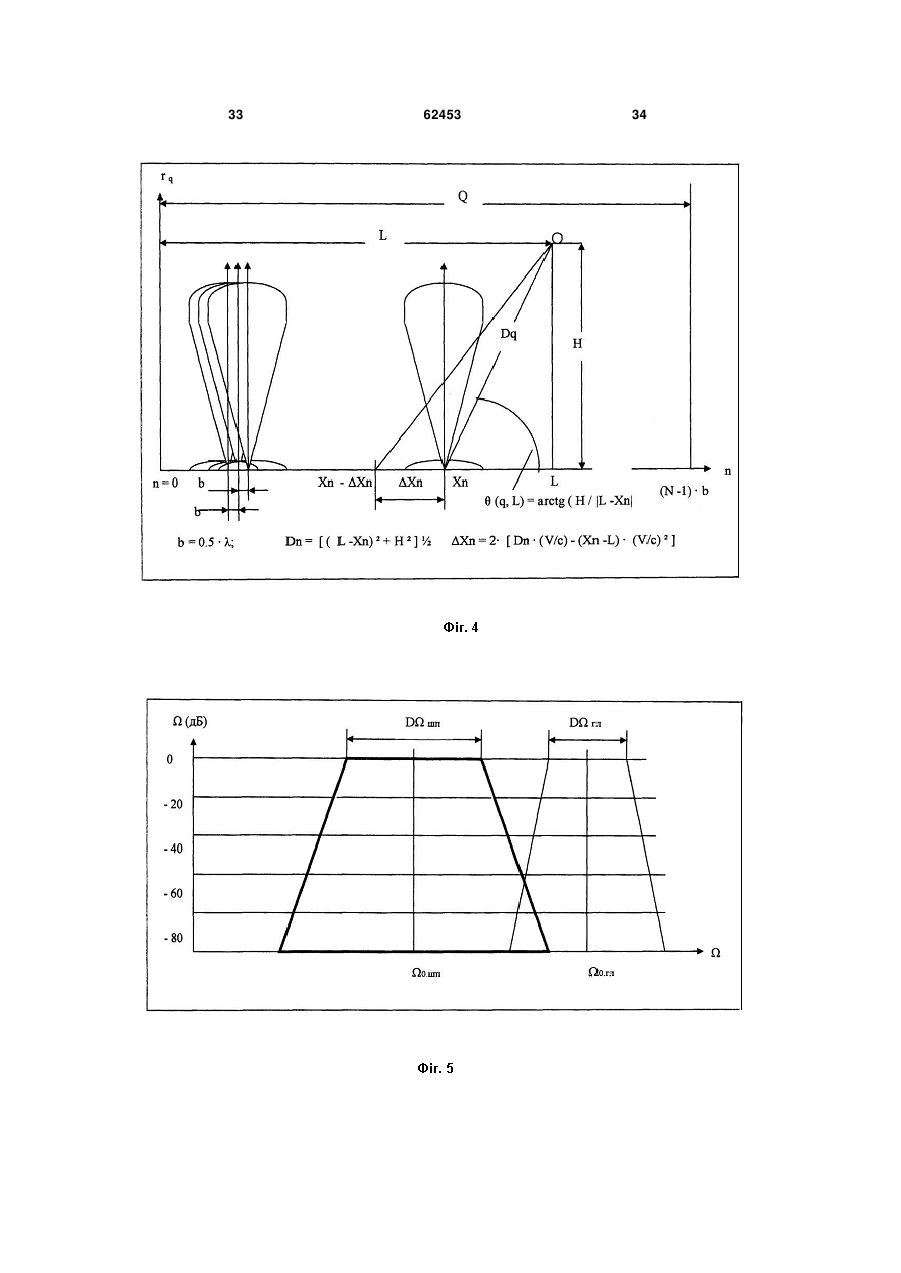
Rv, гл.бо. 0; Відліки R(v, ) що перевищили поріг, відображаються на індикаторі в координатах R(v, )×v для альтернатив по дальності. Цифрова обробка шумових сигналів. У кожному v-му періоді дискретизації Δt процесор первинної, просторово-часової обробки лунасигналів 32 виконує: - стабілізацію кругової бази, інтерполяційним формуванням відліків s[,Ψ,v] у М "фантомних" вузлах (Ψ) за їх значеннями (m, v) у М фізичних приймачах. (54) s, , v k, , m m, v ; (58) m Н=Но+·DH; Н - відстань по нормалі між антеною і лінійною ділянкою трубопроводу; L - координата розсіювача на трубопроводі. При не сфокусованому прийомі Ă(,q)≡1. Масив N× відліків {Rv, } видається в ЕОМ управління, відображення 36. ЕОМ управління, відображення 36 в кожному масиві відліків {Rv, } виконує - обчислення середньоквадратичного за N відліками {Rv, } значення завади ζгл.бо. . m=0,. М-1; =0,. М-1; - формування комплексних, фазованих відліків широко смугових, канальних луна-сигналів Ŭш(jорт, ,v) одиничного променя - jорт, ортогонального до заданого напряму руху, компенсованим сектором стабілізованої дуги цифровим, не рекурсивним фільтром n-го порядку з комплексною імпульсною характеристикою ĥ.ш(,v) у ковзному часовому вікні на середній проміжній частоті лунасигналів ωo.г.л. ˆ Uш j, , v hш m, v s mod jорт m,M , v n 1 v ; v ;(55) - обчислення адаптивного порогу (50) 2 Dq, / V c x q L / c 2 2 N1 R 2 v, N1 Rv, гл. бо. n n (49) D(xq-xq)=[(xq-L-хq) +(Н) ] ; 22 (59) v=0,…n-1; m=0,. M/2-1;jорт=0; ˆ hш , v expi o.ш v n 1 / 2 t о.ш. о / с cos sinD ш / 2 v n 1 / 2 t o / c cos D ш / 2 v n 1 / 2 t o / c cos - відносний номер приймального каналу у промені; ()=2/М; о.ш. - середня частота преселектора шумового сигналу високої частоти; с - швидкість звуку в середовищі; o.ш - середня частота фільтру шумового сигналу проміжної частоти; о=[+(+o/2]/2 - середній радіус приймальної, кругової антени. ; (29) - формування вихідних відліків ŷш(jорт, v) стабілізованого joрт-го променя в ковзному часовому вікні ˆ y ш jорт , v Dm 1 BmUш jорт m, v ; m (61) m=0,… M/2-1;jорт=M/2-1; де: М/2- число каналів прийому, що формують один промінь. 23 62453 - некогерентне накопичення модулів відліків шумового сигналу |ŷш(jорт, v)| в jорт-му промені за N періодів дискретизації ˆ ш jорт ,n N1 y ш jорт , 1 N v ; v=0,…N-1; v риваються з кроком Dx=N·t·V. Масиви відліків відомої діаграми направленості {rш(n-L)}, відліків огинаючої шумового сигналу joрт-го променя у Λ точках траєкторії {υш.б.о.(jорт, n)/θ} утворюють квадратну матрицю коефіцієнтів ||аш.n, L|| i вектор - стовпець ||wш.бо.,n|| правої частини лінійної системи рівнянь (8) для визначення масиву відліків інтенсивності шумового акустичного поля на вході прийомної антени {уш.б.о.L}. (62) aш.n, L yш.б.о.L Wш.б.о.,n ; торової обробки шумових сигналів 34. Процесор вторинної просторової обробки шумових сигналів 34 послідовно формує масиви відліків огинаючої шумового сигналу jорт-го променя rш n L L aш.n, ΔL=rш(n-ΔL); wш.б.о.,n=υш(jopт, n)/Δθ; ˆ hш , o, n exp i о.ш n t .о.ш о / с cosjорт n ˆ Wш.б.о. w ш.б.о.n exp i 2 n / ; n y ш.б.о.n m n L ; ˆ Wш.б.о. expi 2 n / ; R ш. (64) (66) n=0,. Λ-1; ℓ=0, Λ-1; Rш.. rш. k exp i 2 k / M ; k (67) k=0,. Λ-1; ℓ=0, Λ-1; Δk=mod(|n-L|, Λ); { Rш.. } - заздалегідь розрахований комплексний спектр відомої діаграми направленості rш(n-L) в пам'яті процесора 34. 4 ε=10- - параметр регуляризації. Масив відліків {yш.б.о.n} видається в процесор управління, відображення 36. Процесор управління, відображення 36 в кожному масиві відліків {yш.б.о.n} виконує: - обчислення середньоквадратичного по Λ відлікам {yш.б.о.n} значення перешкоди ζш.б.о. (65) - обчислення відліків інтенсивності шумового акустичного поля уздовж траєкторії {yш.б.о.n} через зворотнє перетворення Фур'є 1 2 - обчислення адаптивного порогу Пш.б.о. Пш.б.о.=П0·ζш.б.о.; (69) - порогову oбробку масиву відліків {yш.б.о.n} Ey ш.б.о.n ш.б.о. n=0,. Λ-1; ℓ=0, Λ-1; 2 1 y ш.б.о.n 1 y ш.б.о.n n n (63) L=0,. Λ-1 n=0,. Λ-1; (joрт+m)=·(joрт+m); β(n-L)=β·(n-L); =2·/DM; β=2·/L; m=0,.M/2-1; Процесор вторинної просторової обробки шумових сигналів 34 розв'язуєсистему рівнянь типу згортки (31) щодо розподілу інтенсивності шумового акустичного поля уздовж траєкторії уш.б.о. L частотним методом на основі теореми Релея про спектр згортки з регуляризацією Лаврентьева [2] і виконує при цьому: - обчислення дискретного перетворення Фур'є на масиві відліків {wш.б.о.n} ш.б.о. { ш jорт ,I,n )} у Λ точках траєкторії, що не перек Сформовані процесором первинної просторово-часової обробки шумових сигналів 32 відліки огинаючої шумового сигналу jорт-го променя ш jорт , n поступають в процесор вторинної прос 24 1 y ш.б.о.n ш.б.о. 0; ; (70) 0; y ш.б.о.n ш.б.о. 0; Відліки yш.б.о.n, що перевищили поріг, відображаються на індикаторі в координатах yш.б.о.n×n. Збільшення вірогідності точного виявлення щодо прототипу з аналогічними хвильовими розмірами приймальної антени і параметрами первинної просторово-часової обробки забезпечуєть ; (68) ся когерентним, некогерентним "стисненням" променя з одночасним прийомом луна- і шумових сигналів при виявленні об'єктів з власним акустичним полем і досягається шляхом: - реалізації принципу безперервної луналокації, що забезпечує його поєднання з режимом шумопеленгування; - забезпечення відстроювання від завади прямого випромінювання в каналах прийому шумових сигналів, яка складає ~100 дБ і реалізується рознесенням діапазонів шумопеленгування і луналокації та високо вибірковою частотною фільтрацією на високій і проміжній частоті; - відбудовування від завади прямого випромінювання в каналах прийому луна-сигналів яка складає ~100 дБ реалізується дипольною, у верти 25 62453 кальній площині з "нулем" на випромінювач, діаграмою спрямованості бінарної кругової решітки, розташованої в зоні Фраунгофера випромінювача, "Нуль" діаграми формується обчисленням різниці сигналів акустичних приймачів бінарної кругової решітки, розташованих на одному радіусі і зміщених уздовж радіусу на половину довжини хвилі о/2; - забезпечення просторової вибірковості (завадостійкість в ізотропному полі), яка збільшена щодо одиночного променя синфазної решітки прототипу за рахунок "відновлення" кутового, амплітудного спектру акустичних шумових і лунаK 4/ сигналів на вході приймальної антени по відомій діаграмі направленості і апаратному кутовому спектра на виході сформованих променів в статичному режимі та "відновленням" лінійного розподілу інтенсивності шумових і луна-сигналів на вході приймальної антени уздовж траєкторії по відомій діаграмі направленості і траєкторному сигналу на виході променя в режимі бічного огляду процесорами вторинної просторової обробки. Коефіцієнт концентрації променя адитивної антени, що визначає завадостійкість в ізотропному полі, дорівнює 2 2 2 r , sin d d 4 / r верт sin d r гор d , 2 26 2 (71) 2 r (θ,φ)=r верт(θ)·r гор (φ) відношенням коефіцієнтів концентрації горизонтальних лінійок. Інтерполяційним формуванням фантомних приймачів променя бічного огляду на колі можна перейти від еквідистантного по дузі - не еквідистантного на лінії рівних фаз до не еквідистантного по дузі - еквідистантному на лінії рівних фаз розподілу приймачів. Коефіцієнт концентрації лінійної дискретної еквідистантної антени дорівнює [4] (72) Виграш в завадостійкості В при когерентному синтезі апертури в режимі бічного огляду дорівнює відношенню коефіцієнтів концентрації пропонованого технічного рішення і прототипу В=Ксинт/Кпрот; (73) Через те, що діаграми направленості вертикальних лінійок однакові, виграш В визначається K M 1 M p sin 2 p b 1 / 2 p b 1 p B 1 ; р=1, М-1; 1 (74) 1 M синт 1 М синт p sin 2 p b синт 1 / 2 p b синт 1 р Mпроп 1 Мпрот q sin 2 q b прот 1 / 2 p b прот 1 q ; (75) p=1,. Мсинт; q=,. Мпрот -1 -1 Наприклад, для Мсинт=64; Мпрот=8;bсинт· =bпрот· =1/2 B Mсинт 1 Mсинт р 0 p Mпрот 1 Mпрот q 0 q 1 1 Mcиин 8 Мпрот Вірогідність правильного виявлення D є функцією відносного порогу uо, відношення сигнал завада qo по напрузі і дорівнює [5] Du0 , qo 1 2 exp t uo qo 2 / 2 dt ; (77) -6 При вірогідності помилкових тривог F=10 , початковому відношенні сигнал - завада qo=2.5 вірогідність правильного виявлення складає D[uo(F=10 (76) 6 ), qo=2.5]≈0,01. За рахунок стискання променя на синтезованій апертурі B=8, виграш по напрузі становить √В=2,8 разів, і вірогідність правильного -6 виявлення збільшується до D[uo(F=10 ), q=√В·qo=7]≈0,98 [5] У випадку суміщення режимів шумопеленгування і луна-локації порівняння вихідних сигналів шумопеленгування та луна-локації з порогами незалежні випробування з вірогідністю перевищення порогу хоч би одним з сигналів - D дорівнює [6] 27 D=Dгл+Dшп-Dгл·Dшп 62453 (78) Dгл - вірогідність перевищення порогу вихідним луна сигналом. Dшм - вірогідність перевищення порогу вихідним шумовим сигналом. Для Dгл=Dшп=0,49D=0,74. Джерела інформації: 1. Антипов В.Н., Горяинов В.Т. и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. М.: Радио и связь, 1988. 2. Верлань А.Ф., Сизиков В.С. Интегральные уравнения: Методы. Алгоритмы. Программы. К.: Наукова думка, 1986. - С. 223-323. 28 3. Придэм Р.Г., Муччи Р.А. Цифровой интерполяционный метод формирования пуча для низкочастотных и полосовых сигналов. / ТИИЭР т.67 № 6,1979. - С. 29-48. 4. Евтютов А.П. Инженерные расчеты в гидроакустике "Судостроение", 1988. - С. 19. 5. Финкельштейн М.И. Основы радиолокации. М.: "Радио и связь", 1983. - С. 244-245. 6. Гмурман В.Е. Теория вероятностей и математическая статистика. М.: "Высшая школа", 1977. - С. 49. 29 62453 30 31 62453 32 33 62453 34 35 62453 36 37 62453 38 39 Комп’ютерна верстка А. Рябко 62453 Підписне 40 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHydro-acoustic device for monitoring of sea pipelines
Автори англійськоюZatserkovskyi Ruslan Oleksiiovych, Kovalchuk Kostiantyn Volodymyrovych, Melenko Yurii Yaroslavovych, Faleev Ihor Mykhaiklovych, Khalilov Eduard Maherramovych
Назва патенту російськоюГидроакустическое устройство мониторинга морских трубопроводов
Автори російськоюЗацерковский Руслан Алексеевич, Ковальчук Константин Владимирович, Меленко Юрий Ярославич, Фалеев Игорь Михайлович, Халилов Эдуард Магеррамович
МПК / Мітки
МПК: G01S 15/00, H01Q 21/00
Мітки: морських, пристрій, гідроакустичний, трубопроводів, моніторингу
Код посилання
<a href="https://ua.patents.su/20-62453-gidroakustichnijj-pristrijj-monitoringu-morskikh-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Гідроакустичний пристрій моніторингу морських трубопроводів</a>
Спосіб акустичної діагностики трубопроводів та пристрій для його здійснення
Номер патенту: 88847
Опубліковано: 25.11.2009
Автори: Зацерковський Руслан Олексійович, Халілов Едуард Магеррамович, Гулега Леонід Григорович, Хоменко Олександр Григорович, Руснак Володимир Миколайович
МПК: F17D 5/02, G01N 29/04, G01M 3/24
Мітки: трубопроводів, акустичної, пристрій, діагностики, спосіб, здійснення
Формула / Реферат:
1. Спосіб акустичної діагностики трубопроводів, що включає розміщення щодо трубопроводу діагностичної апаратури, яка забезпечує збудження, приймання імпульсів ультразвукових коливань, порогову обробку і вимірювання їх параметрів, який відрізняється тим, що акустичні датчики розміщують стаціонарно і симетрично щодо акустичного випромінювача, а в рідке середовище, що транспортується, випромінюють імпульси ультразвукових коливань з симетричною...
Пристрій електроакустичного моніторингу стану магістральних трубопроводів
Номер патенту: 88978
Опубліковано: 10.12.2009
Автори: Хоменко Олександр Григорович, Соловей Володимир Юхимович, Зацерковський Руслан Олексійович, Гулега Леонід Григорович, Руснак Володимир Миколайович, Халілов Єдуард Магеррамович, Хован Анатолій Степанович, Павлюк Олег Євгенович, Карпенко Євген Валерійович, Голоцуков Олег Володимирович, Слива Валентин Васильович
МПК: F17D 5/00, G01N 29/00, G01M 3/24
Мітки: електроакустичного, стану, магістральних, трубопроводів, моніторингу, пристрій
Формула / Реферат:
1. Система електроакустичного моніторингу стану магістральних трубопроводів, що містить зональну ЕОМ збору даних і керування, М лінійних вимірювальних пристроїв (ЛВП), розташованих уздовж траси трубопроводу, кожний з яких має контролер обміну, джерело електроживлення, виходи якого підключені до живильних входів активних пристроїв ЛВП, синтезатор тактових і гетеродинних частот, приймальний пристрій акустичних сигналів пошкоджень, який містить...
Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій
Номер патенту: 30234
Опубліковано: 25.02.2008
Автори: Бабій Владлен Іванович, Зонтова Тетяна Володимирівна
МПК: H04B 1/62
Мітки: обстановки, морських, безперервного, система, моніторингу, акваторій, територіальних, гідроакустичного, ближнього, вод, підводної
Формула / Реферат:
Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій, що містить генератор, з'єднаний з акустичним випромінювачем, вихід генератора з'єднаний з дискретною лінією затримок, виходи ліній затримок підключені до перших входів помножувачів, приймальний перетворювач з'єднаний із входом передпідсилювача, вихід якого підключений до входів смугових фільтрів, виходи фільтрів підключені...
Система електроакустичного моніторингу стану магістральних трубопроводів
Номер патенту: 35494
Опубліковано: 25.09.2008
Автори: Голоцуков Олег Володимирович, Зацерковський Руслан Олексійович, Слива Валентин Васильович, Карпенко Євген Валерійович, Хован Анатолій Степанович, Павлюк Олег Євгенович, Хоменко Олександр Григорович, Гулега Леонід Григорович, Руснак Володимир Миколайович, Соловей Володимир Юхимович, Халілов Едуард Магеррамович
Мітки: магістральних, система, моніторингу, електроакустичного, стану, трубопроводів
Формула / Реферат:
1. Система електроакустичного моніторингу стану магістральних трубопроводів, що включає зональну електронну обчислювальну машину (ЕОМ) збору даних і керування, лінійні вимірювальні пристрої (ЛВП), розташовані уздовж траси трубопроводу, кожний з яких має контролер обміну, джерело електроживлення, виходи якого підключені до живильних входів активних пристроїв ЛВП, синтезатор тактових і гетеродинних частот, приймальний пристрій акустичних...
Акустичний пристрій для виявлення місць протікання підземних трубопроводів
Номер патенту: 79240
Опубліковано: 11.06.2007
Автори: Бондарева Ольга Миколаївна, Трушкін Олександр Миколайович, Чернега Віктор Степанович
МПК: F17D 5/02, F17D 5/06, G01M 3/24
Мітки: протікання, пристрій, підземних, місць, виявлення, акустичний, трубопроводів
Формула / Реферат:
Акустичний пристрій для виявлення місць протікання підземних трубопроводів, що містить чутливий елемент, з’єднаний з підсилювачем сигналів, послідовно з'єднані аналого-цифровий перетворювач, блок перемноження, суматор, пороговий елемент, блок індикації і блок синхронізації та керування, а також головні телефони оператора, який відрізняється тим, що в нього додатково введені ключовий елемент, який включений між виходом підсилювача сигналів і...
Попередній патент: Спосіб визначення анізотропії за характеристиками ступеня пошкодження матеріалу внаслідок накопичування розсіяних пошкоджень
Наступний патент: Спосіб переробки фосфатної сировини
Випадковий патент: Спосіб прогнозування ймовірності розвитку запалення і надмірної проліферації в зоні оперативного втручання у хворих з первинною відкритокутовою глаукомою