Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій
Номер патенту: 30234
Опубліковано: 25.02.2008
Автори: Зонтова Тетяна Володимирівна, Бабій Владлен Іванович
Формула / Реферат
Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій, що містить генератор, з'єднаний з акустичним випромінювачем, вихід генератора з'єднаний з дискретною лінією затримок, виходи ліній затримок підключені до перших входів помножувачів, приймальний перетворювач з'єднаний із входом передпідсилювача, вихід якого підключений до входів смугових фільтрів, виходи фільтрів підключені до інших входів помножувачів, виходи помножувачів підключені до входів фільтрів низьких частот, яка відрізняється тим, що для збільшення дальності виявлення цілі й підвищення скритності роботи системи вона додатково містить генератор безперервного широкосмугового шуму, широкосмуговий акустичний випромінювач, погоджені керовані адаптивні смугові цифрові фільтри ![]()
![]() ....
....![]() , з'єднані з керуючим процесором відображення R(n) й обчислення поточних спектрів Sn блока Б, процесор з'єднаний з блоком прийняття рішень і банком даних, який дає можливість розпізнавати біоресурси, поновлювати дані гідрологічних і гідроморського середовища.
, з'єднані з керуючим процесором відображення R(n) й обчислення поточних спектрів Sn блока Б, процесор з'єднаний з блоком прийняття рішень і банком даних, який дає можливість розпізнавати біоресурси, поновлювати дані гідрологічних і гідроморського середовища.
Текст
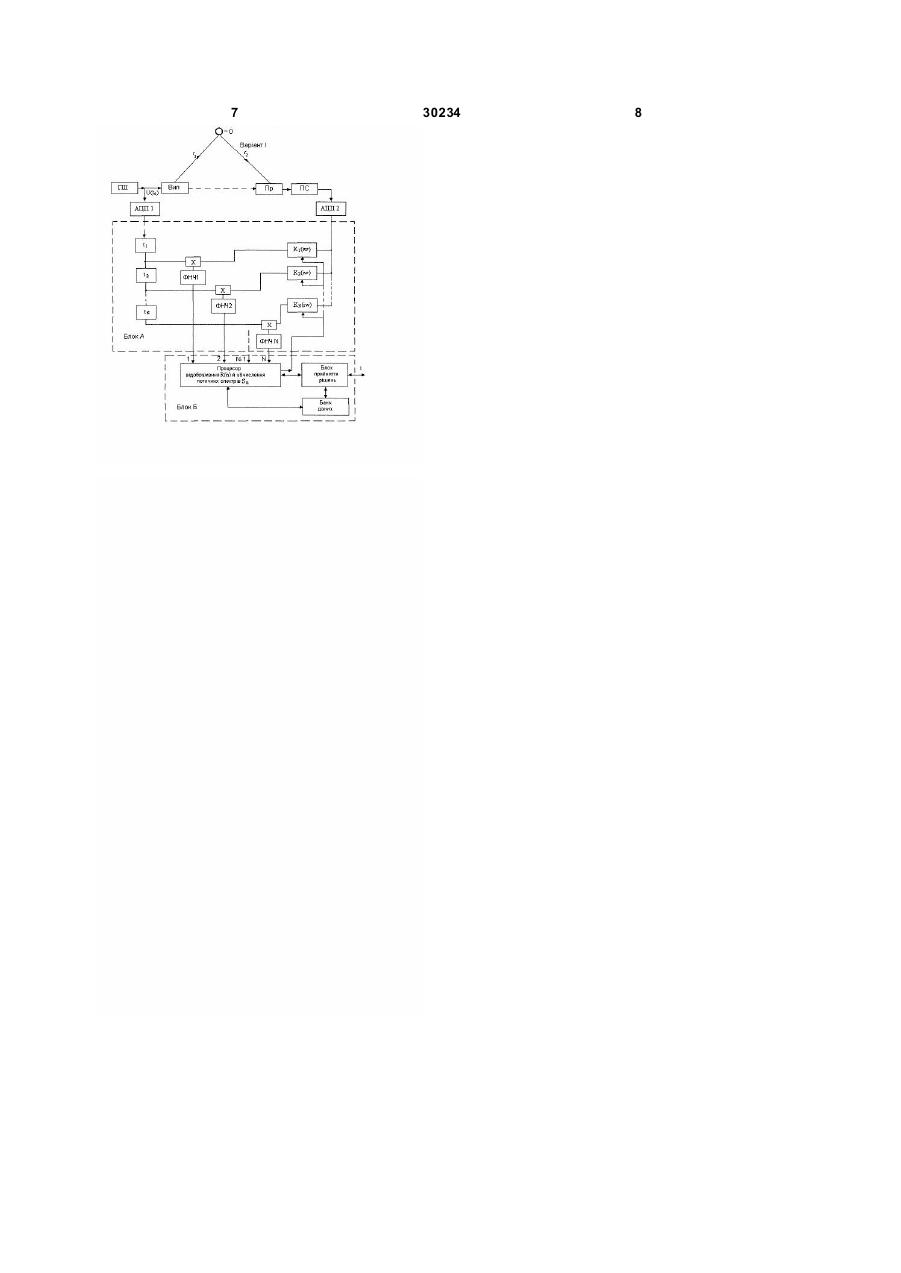
Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій, що містить генератор, з'єднаний з акустичним випромінювачем, вихід генератора з'єднаний з дискретною лінією затримок, виходи ліній затримок підключені до перших входів помножувачів, приймальний перетворювач з'єднаний із входом передпідсилювача, вихід якого підключений до входів смугових фільтрів, виходи фільтрів підключені до інших входів помножувачів, виходи помножувачів підключені до входів фільтрів низьких частот, яка відрізняється тим, що для збільшення дальності виявлення цілі й підвищення скритності роботи системи вона додатково містить генератор безперервного широкосмугового шуму, широкосмуговий акустичний випромінювач, погоджені керовані У даній області гідроакустики проблема безперервного моніторингу (контролю) підводної обстановки прибережних вод у конкретних акваторіях моря (бухта х, портах, зонах рибного промислу, видобутку корисних копалин на шельфі - газ, нафта й т.п.) є актуальною. Це пов'язане з необхідністю розробки й створення перспективних гідроакустичних систем ближнього безперервного спостереження морського середовища з високим просторовим дозволом. При цьому система повинна забезпечувати екологічну безпеку за рахунок застосування високих ультразвукових частот (сотні кГц) і зниження спектрального рівня акустичного випромінювання шляхом використання шумового сигналу з великою базою b = D f × t , де Dt - смуга частот акустичного випромінювання, t - тривалість сигналу. Переваги такої системи проявляються ще й у тім, що вона забезпечує максимальне відношення сигнал/шум за рахунок роботи в діапазоні частот, де рівень власних акустичних шумів морського середовища мінімальний. Це дає можливість додатково знизити рівень акустичного випромінювання при роботі системи. У теж час сучасні гідроакустичні системи («Паллада», «ГАСМ МГ-89М», «УПО09Ф», «Виньетка-ЭМ»), які використовують, як правило, імпульсні або ЛЧМ випромінювання з високою спектральною інтенсивністю. При розробці системи підводного моніторингу для реалізації можливостей (граничної чутливості, що дозволяє здатності, дальності виявлення й т.п.) дуже важливо враховувати акустичні властивості морського середовища (частотну залежність коефіцієнтів поглинання й ослаблення), що впливають на поширення в ній акустичного випромінювання. Пропонована система дозволяє враховувати а втоматично ці властивості середовища і їхня мінливість у часі, реалізуючи потенційну чутливість системи. Найбільш близьким до пропонованої системи (пристрою) технічним рішенням обраний найближчий аналог системи ТАРП (тимчасове автоматичне регулювання посилення). [По пункті №3 згадується найближчий аналог до заявленої системи: Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. – СПб.: Наука. адаптивні K 2 (iw ) смугові цифрові фільтри K1(iw), (19) UA (11) 30234 (13) U .... K N (iw) , з'єднані з керуючим процесором відображення R(n) й обчислення поточних спектрів Sn блока Б, процесор з'єднаний з блоком прийняття рішень і банком даних, який дає можливість розпізнавати біоресурси, поновлювати дані гідрологічних і гідроморського середовища. 3 30234 4 – 410с. (см. стр. 89, 238, 249), а также Логинов К.В. наприклад, загасання в смузі придушення не Гидроакустические поисковые приборы. – М., можна зробити нижче -60-70дБ (якщо 1971. – 302с. (см. стр.69, 107-112)]. Ця система, використовува ти стандартні аналогові передбачена в схемах сучасних приладів компоненти). Точність ЦФ обмежена тільки (гідролокаторів, ехолотах і т.п.), змінює коефіцієнт використовуваною довжиною його вагової функції; підсилення прийомного тракту від мінімального (у 7. Продуктивність ЦФ однакова для всіх момент посилки зондувального імпульсу) до пристроїв серії; максимального значення, обмеженого рівнем 8. ЦФ можуть використовуватися у великому власних шумів морського середовища. діапазоні частот, для чого досить просто поміняти Зростаючий у часі коефіцієнт підсилення частоту дискретизації; компенсує убутн у інтенсивність зондувального 9. ЦФ мають високу відтворюваність і імпульсу через розширення фронту хвилі з стабільністю частотних характеристик дистанцією й поглинанням звуку в морському (амплітудних і фазової) і коефіцієнтів передачі. середовищі при поширенні. У відомій системі ТАРП міняється тільки Суть корисної моделі є підвищення коефіцієнт передачі, а частотна характеристика ефективної системи ближнього гідроакустичного прийомного тракту залишається незмінної. безперервного моніторінгу підводної обстановки Пропонована система дозволяє враховувати й теріторіальних вод морських акваторій і компенсувати змінність самої частотної й фазової забезпечення скритності роботи системи за характеристик морського середовища, оскільки на рахунок широкосмугового сигналу або сигналу з високих частотах (наприклад, сотні кілогерціввеликою базою, тому що сигнал широкосмуговий, мегагерц) коефіцієнт поглинання ультразвуку в а морське середовище має частотно-залежний морському середовищі залежить від частоти коефіцієнт поглинання звуку (приблизно квадратически. квадратично залежне поглинання звуку від Схема реалізації й суть пропонованого частоти), те в системі пропонується пристрою зображена на кресленні де, ГШ – використовува ти адаптивну цифрову смугову генератор шуму; ПС широкосмуговий фільтрацію сигналу залежно від дистанції й підсилювач; Вип – широкосмуговий випромінювач частоти. Для одержання максимального ультразвуку; Пр – широкосмуговий прийомний відношення сигнал/шум необхідно цей прийнятий ультразвуковий перетворювач; О – лоцируємий сигнал профільтрувати через смуговий фільтр із об’єкт (ціль); Х – перемножник; ФНЧ – фільтр комплексної частотної (амплітудною й фазової) низьких частот; АЦП – аналогово-цифровий характеристикою, дійсна й мнима складова якого перетворювач; t1, t2 ,…tN – блоки затримки; К1(iw), сполучена або зворотно тієї, що має морське К2(iw), ...,КN(iw) – погоджені смугові фільтри; r1, r2 – середовище, що розглядаємо у вигляді фільтра. відстань до об’єкта від Вип і Пр; І – інтерфейс. Оскільки дистанції до лоцируємого об'єкта Пропонована система активної безперервної міняються, то одержуємо фільтр, що описує шумової гідроакустичної локації морського середовище, зі змінними параметрами. Тому середовища містить багатоканальний прийомний необхідно зробити широкополосну приймальню тракт для виявлення відбитих від об'єктів систему адаптивної до характеристик середовища, акустичних сигналів, що реалізує концепцію що у цій смузі частот робить ці перетворення оптимального (потенційного) приймача з зворотними. Пропонується здійснити таку систему максимальним відношенням сигнал/шум. Число за допомогою набору цифрових фільтрів і каналів прийому визначається числом елементів кореляторів з інтеграторами. При цьому просторового дозволу по дальності (обумовленого використовуємо деякі переваги цифрових фільтрів шириною спектра шумового випромінювання) (ЦФ) у порівнянні з аналоговими: разміщающихся на граничній дистанції. 1. ЦФ можуть мати характеристики, одержати Система може працювати не тільки «на які на аналогових фільтрах неможливо, відбиття» від об'єктів, але й «на просвіт», тобто наприклад, дійсно лінійну фазочастотну коли випромінювач спрямований безпосередньо характеристику; на прийомний ультразвуковий перетворювач, що 2. Якщо фільтр побудований з використанням дає можливість, зокрема, контролювати програмувального процесора, його частотна біоресурси, а також відновлювати гідрологічні й характеристика може настроюватися гідрофізичні характеристики морського (перепрограмуватися) автоматично, наприклад, середовища (температура, солоність, швидкість при зміні гідрології морського середовища, звуку й т.п.) на акустичній трасі. З метою оскільки коефіцієнт поглинання звуку залежить від збільшення дальності виявлення мети й температури й солоності; підвищення скритності роботи системи 3. Один ЦФ може обробляти кілька вхідних широкосмуговий генератор шуму й акустичний сигналів або каналів без дублювання апаратних випромінювач випромінюють у морське блоків; середовище безперервний шумовий 4. Як фільтровані, так і нефільтровані дані широкосмуговий акустичний сигнал з великою можна зберегти для наступного використання; базою, а коефіцієнти передачі й частотні 5. Можливість одержувати невеликі ЦФ зі характеристики адаптивних цифрових смугових зниженою споживаною потужністю й більше фільтрів К1(iw), К2(iw), ...,КN(iw) управляються низькою ціною; процесором блоку Б і є погодженими із частотними 6. На практиці точність, якої можна домогтися хароктеристиками морського середовища й при використанні аналогових фільтрів, обмежена; власним спектром акустичного шуму середовища, 5 30234 6 які залежать від дистанції (часів затримок t1, сигналу. Перевага кореляційної системи полягає в t2,…tN) і гідрологичних характеристик середовища тому, що вона дозволяє виявляти відбитий (температури, солоності), одержаними з банку неуважний шумовий сигнал коли відношення даних або посредствам окремих прямих вимірів; сигнал/шум навіть у багато разів менше одиниці. процесор по максимуму функції кореляції визначає Сигнали з виходів перемножників Х надходять на відстань до мети. входи цифрових ФНЧ. Всі ФНЧ мають ту саму Система ближнього гідроакустичного смугу пропущення, тобто вони ідентичні по безперервного моніторингу підводної обстановки характеристиках. Наведені до входу власні шуми територіальних вод морських акваторій самої прийомної системи з ПС і АЦП2 повинні бути складається з: генератора широкополосного шуму багато менше природних акустичних шумів ГШ, вхід якого з'єднаний з випромінювачем Вип морського середовища. Далі вихід кожного ФНЧ ультразвуку в морське середовище й входом з'єднаний із процесором блоку Б. Процесор блоку аналого-цифрового перетворювача АЦП1; Б обчислює й відображає просторово-тимчасову широкополосного прийомного перетворювача Пр кореляційну функцію, що містить N - дискретних вихід якого з'єднаний із входом широкополосного відліків. При цьому дистанція (відстань) до мети малошумливого підсилювача ПС; вихід ПС (об'єкта) при r1 = r2 визначають по вираженню з'єднаний із входом АЦП2; вихід АЦП2 з'єднаний із n ×t 0 rn = C × входами погоджених смугови х ци фрових фільтрів 2 , де С - швидкість звуку в середовищі; K1(iw), K2(iw), ..., Kn(iw), ви ходи, яких підключені до n - номер каналу, що відповідає максимуму перших входів цифрови х перемножників X. Вихід кореляційної функції; t0 - крок затримки в АЦП1 підключений до входу лінії цифрової зрушеному регістрі. Наприклад: при С=1500м/с, затримки t1, t 2, .,., tN (зрушеному регістру); n=200; t0=10-3 з; одержимо r=150м. Гранична відгалуження від лінії затримки підключені до дистанція виявлення мети обмежується при други х входів перемножників X. Ви ходи кожного заданому рівні природного акустичного шуму цифрового перемножника Х підключені до входів середовища (який на високих частотах ідентичних цифрових фільтрів низьких частот b = Df × tc , ФНЧ. Виходи ФНЧ підключені до процесора блоку мінімальний) величиною бази сигналу Б. Блоки А и Б можуть бути реалізовані на основі де D f - смуга випромінюваного шумового сигналу, мікропроцесорів або на одному потужному процесорі. Процесор блоку Б з'єднаний із блоком обмежена смугою пропущення фільтрів KN(iw), t c прийняття рішень, банком даних і шиною - тривалість, обумовлена граничною частотою інтерфейсу И. Інший вихід процесора блоку Б смуги пропущення ФНЧ. Наприклад, при Df=40кГц, з'єднаний з адаптивними цифровими фільтрами tc=1 з, F=2 одержимо середнє квадратичне K1(iw), K2(iw), ..., KN(iw) для регулювання відхилення (випадкову погрішність або (установки) їхніх коефіцієнтів передачі й частотних флуктуаційний поріг чутли вості системи) характеристик залежно від дистанції (номера F ×W 2× W каналів і гідрології).0сновні потоки вимірювальної dW » » 200 Df × t c інформації циркулюють у блоках А и Б, а або 1% (тобто -20дБ) від результуюча інформація до зовнішніх споживачів у рівня шуму морського середовища, де F - шумстислому виді надходить через шину інтерфейсу І. фактор прийомного тракту, W - сума енергії Система працює в такий спосіб: сигналу й шум у середовища. широкосмуговий сигнал, від генератора шуму ГШ Банк даних містить відомості про гідрологічні й надходить на випромінювач Вип, випромінюється акустичні характеристики морського середовища в в морське середовище, доходить до мети, даній акваторії на сучасний момент часу. Крім частково відбивається й вертається на приймач цього інформація з виходів 1, 2..N надходить у Пр у вигляді ослабленого неуважного сигналу. банк даних для нагромадження відомостей про Після перетворення звуку в Пр в електричний фонові умови в контрольованій акваторії. сигнал, він підсилюється й надходить на вхід Блок прийняття рішень на основі сигналів з АЦП2. Далі сигнал у цифровому виді піддається виходів ФНЧ (тобто функції кореляції) і заданих математичній обробці в блоці А. Тобто адаптивних порогів виявлення, видає через пропонована система кореляційна, те інтерфейс І споживачеві інформацію про стан оцифровиваєм і опорний сигнал за допомогою середовища й наявність у ній об'єктів, їхню АЦП1. По опорному сигналі від ГШ формуємо класифікацію й характеристики. затримки t1, t2, ..., tN (регістр зрушення), а прийнятий сигнал у цифровому виді з виходу АЦП2 надходить на входи набору цифрових фільтрів K1(iw), K2(iw), ..., KN(iw), у яких по командах процесора блоку Б змінюється залежно від дистанції (номера каналів і гідрології) коефіцієнт передачі й форма частотної характеристики. Набір ЦФ K1(iw), K2(iw), ..., KN(iw), входи, яких з'єднані з виходом АЦП2, а виходи кожного ЦФ з'єднані з першим входом перемножника X. Гранична дистанція до мети, обмежується умовою, коли рівень шуму рівняється із заданим коефіцієнтом з рівнем прийнятого 7 30234 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for near-in hydroacoustic continuous monitoring underwater situation of offshore zone marginal waters
Автори англійськоюBabii Vladlen Ivanovych, Zontova Tetiana Vоlоdуmуrіvnа
Назва патенту російськоюСистема ближнего гидроакустичекого непрерывного мониторинга подводной обстановки территориальных вод морской акватории
Автори російськоюБабий Владлен Иванович, Зонтова Татьяна Владимировна
МПК / Мітки
МПК: H04B 1/62
Мітки: підводної, вод, акваторій, обстановки, територіальних, система, гідроакустичного, ближнього, морських, моніторингу, безперервного
Код посилання
<a href="https://ua.patents.su/4-30234-sistema-blizhnogo-gidroakustichnogo-bezperervnogo-monitoringu-pidvodno-obstanovki-teritorialnikh-vod-morskikh-akvatorijj.html" target="_blank" rel="follow" title="База патентів України">Система ближнього гідроакустичного безперервного моніторингу підводної обстановки територіальних вод морських акваторій</a>
Гідробіологічний спосіб боротьби із забрудненням морських акваторій
Номер патенту: 21460
Опубліковано: 16.12.1997
Автор: Миронов Олег Глебович
Мітки: спосіб, морських, гідробіологічний, боротьби, акваторій, забрудненням
Формула / Реферат:
Гидробиологический способ борьбы з загрязнением морских акваторий, заключающийся в формировании на носителях сообществ морских организмов, отличающийся тем, что в качестве первого звена очистки используются моллюски-фильтраторы, а носители размещают в акваториях с уровнем загрязнения по нефтепродуктам 1-100 ПДК (0,05-5,0 мг/л).
Пристрій для безперервного моніторингу стану коліс рухомого складу
Номер патенту: 19305
Опубліковано: 15.12.2006
Автори: Войтенко Галина Олегівна, Осенін Юрій Іванович, Войтенко Володимир Панасович
МПК: B61K 9/00
Мітки: рухомого, коліс, складу, моніторингу, безперервного, стану, пристрій
Формула / Реферат:
Пристрій для безперервного моніторингу стану коліс рухомого складу, що містить мікроконтролер, з'єднаний з керуючим входом комутатора й керуючими та інформаційними ланцюгами аналого-цифрового перетворювача, генератор імпульсів, керуючий вхід якого з'єднаний з виходом мікроконтролера, а вихід підключений до комутатора, приєднаного до резонансного підсилювача, оперативний запам'ятовуючий пристрій, постійний запам'ятовуючий пристрій та ЕОМ,...
Спосіб безперервного моніторингу стану коліс рухомого складу
Номер патенту: 19304
Опубліковано: 15.12.2006
Автори: Войтенко Галина Олегівна, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: стану, безперервного, складу, моніторингу, спосіб, рухомого, коліс
Формула / Реферат:
Спосіб безперервного моніторингу стану коліс рухомого складу, відповідно до якого в контрольованому виробі збуджують ультразвукові коливання, приймають віддзеркалені від дефектів сигнали, здійснюють цифровий запис амплітуд віддзеркалених сигналів та часу їх надходження, за часом надходження сигналу визначають відстань до дефекту, далі, порівнюючи значення відстані між перетворювачем та дефектом при їх різному взаємному розташуванні,...
Система моніторингу забруднень атмосфери міста
Номер патенту: 38680
Опубліковано: 15.05.2001
Автори: Фунтова Наталія Леонідівна, Фунтов Ігор Леонідович
МПК: G06M 1/00, G08B 25/01, G01S 1/00, G08B 25/10
Мітки: міста, забруднень, моніторингу, система, атмосфери
Формула / Реферат:
1.Система моніторингу забруднень атмосфери міста при виконанні спостережень за громадським транспортом, яка містить транспортну одиницю, оснащену групою датчиків, сполучених із блоком обробки даних, який містить приймально-передавальні засоби для зчитування /запису оперативної інформації від стаціонарно розміщених маячків, зв'язані/із маршрутом руху даної транспортної одиниці, і передачі її за допомогою радіозв'язку або через інтерфейс, що...
Система диспетчеризації, централізованого контролю, моніторингу і телеметрії
Номер патенту: 22934
Опубліковано: 25.04.2007
Автори: Ласкаржевская Юлія Владіміравна, Кравчук Ніколай Іванавіч, Єлісєєв Андрєй Аляксандравіч
МПК: H04J 3/08
Мітки: централізованого, диспетчеризації, телеметрії, моніторингу, контролю, система
Формула / Реферат:
Система диспетчеризації, централізованого контролю, моніторингу і телеметрії для прийому і/або передачі сигналів аварійній сигналізації, повідомлення, що включає об'єктові пристрої у вигляді приладів контролю і/або керування, забезпечені модулями з'єднання з каналами зв'язку, та з'єднаний з ними пункт центрального спостереження, яка відрізняється тим, що пункт централізованого спостереження – ПЦС-виконаний у вигляді центральної станції...
Попередній патент: Біокерамічний пломбувальний матеріал для кореневих каналів
Наступний патент: Ручний пристрій для реєстрації виборців
Випадковий патент: Пристрій для очистки газу в трубопроводах