Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 102029
Опубліковано: 27.05.2013
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
Формула / Реферат
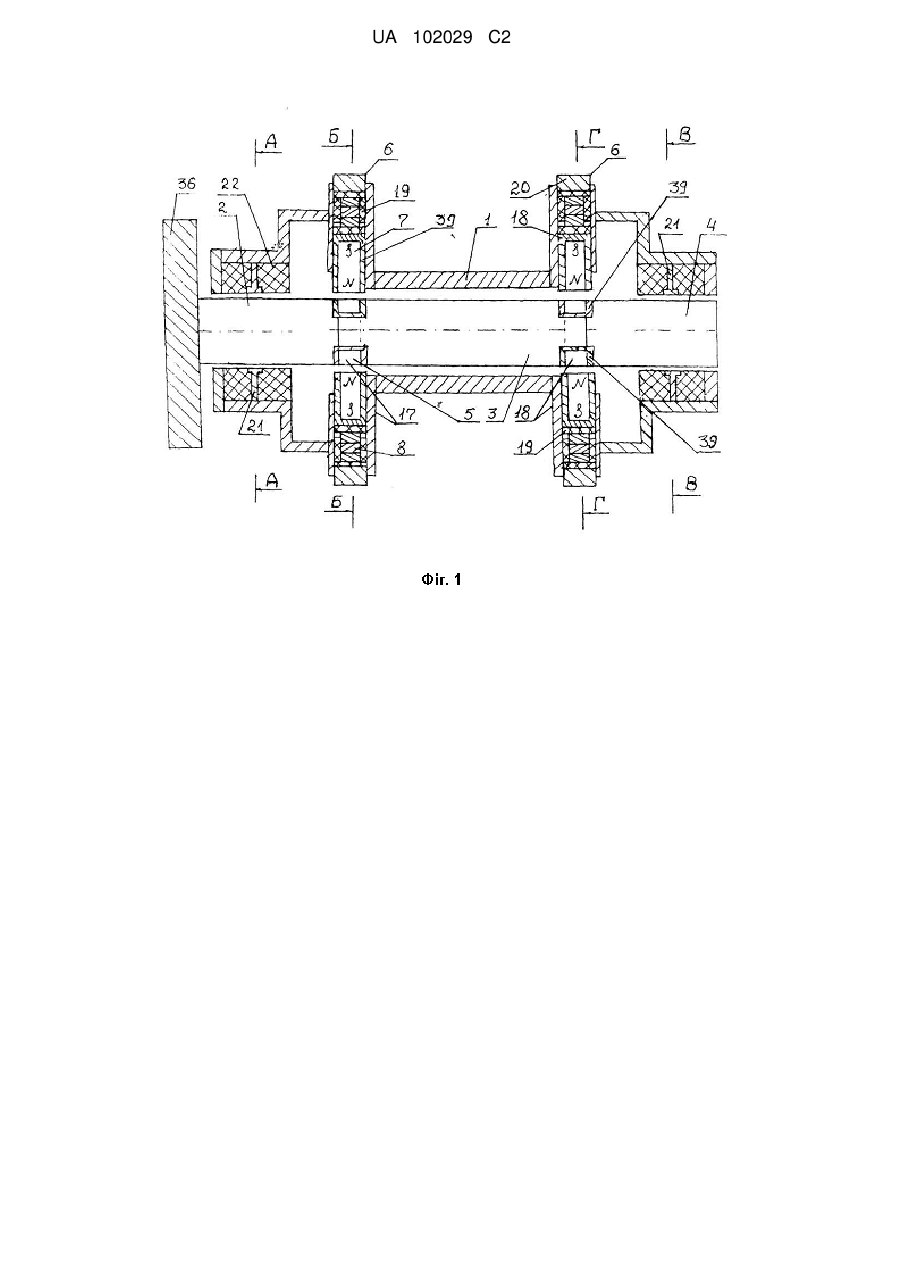
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси, який відрізняється тим, що датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на постійних магнітах в перерізах по A-А і В-В опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем координат ΧΑОАYΑ і XBOBYB по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем координат ΧБОБΥБ і XГОГΥГ, осі яких паралельні між собою і паралельні осям систем координат ΧΑΟΑΥΑ ΧΒΟΒΥВ, і під датчиками величин зазорів, установлених по однойменних осях систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, установлюють рівні величини зазорів, вісь симетрії вала шпиндельної опори на постійних магнітах суміщають з початками систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхувань між групами силових магнітних відштовхувачів, установлених по однойменних осях систем координат ΧБΟБΥБ і ΧГΟГΥГ, і магнітами вала опори при заданій величині зсуву вала опори по цих осях і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутову швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту φ=0, Ν разів вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ΧΑ,+ΥΑ,+ΧВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту φ-0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання ω1, яка задовольняє нерівностям ω1![]() <ωкр вала і ω1
<ωкр вала і ω1![]() ωкр пч, на куту φ=0 повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ,+ХВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в плоскостях установки датчиків величин зазорів по осях систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ і розраховуються величини зсуву геометричної осі обертання вала і кути нахилу векторів динамічного навантаження на вал опори до осей XА і XВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, на кутовій швидкості ω1 балансують вал опори і установлюють під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ,+XВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, величини зазорів, які забезпечують мінімум нормі різниць
ωкр пч, на куту φ=0 повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ,+ХВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в плоскостях установки датчиків величин зазорів по осях систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ і розраховуються величини зсуву геометричної осі обертання вала і кути нахилу векторів динамічного навантаження на вал опори до осей XА і XВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, на кутовій швидкості ω1 балансують вал опори і установлюють під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ,+XВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, величини зазорів, які забезпечують мінімум нормі різниць

і наближають геометричну вісь обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю, якщо норма різниць не дорівнює нулю з кроком Δω, збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на k-му кроці підвищення кутової швидкості обертання вала на куту повороту j=0, Ν разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ΧΑ,+ΥΑ,+ΧΒ,+ΥΒ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори j +0, j=Dj, j=2Dj,...,j=kDj,...,j=360°-Dj N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ΧΑ,+ΥΑ,+ΧВ,+ΥВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ, обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками величин зазорів, установлених по півосях +XA,+YA,+XВ,+YВ систем координат ΧΑΟΑΥΑ і ΧΒΟΒΥВ на дискретах кута повороту вала опори порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення,
де: ![]() - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА,+YA,+ХB YB систем координат XAOAYA і XBOBYB на куту φ = 0 повороту вала при ωвала=0;
- асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА,+YA,+ХB YB систем координат XAOAYA і XBOBYB на куту φ = 0 повороту вала при ωвала=0;
![]()
![]() - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ+XВ,+ΥВ систем координат ΧΑΟΑΥΑ і XВOВYВ на куту φ=0 повороту вала при ωвала=ω1.
- асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА,+ΥΑ+XВ,+ΥВ систем координат ΧΑΟΑΥΑ і XВOВYВ на куту φ=0 повороту вала при ωвала=ω1.
Текст
Реферат: Винахід належить до верстатобудування і може використовуватись при конструюванні прецизійних верстатів для обробки точних елементів оптики і механіки. Це досягається тим, що спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси, згідно з винаходом, датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на постійних магнітах в перерізах Α А Α B B B по А-А і В-В опори по осях систем координат Χ О Y і X O Y по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала Б Б Б Г Г Г шпиндельної опори на постійних магнітах по осях систем координат Χ О Y і X O Y , осі яких Α А Α B B B паралельні між собою і паралельні осям систем координат Χ О Y і X O Y , і під датчиками Α А Α B B B величин зазорів, установлених по однойменних осях систем координат Χ О Y і X O Y , установлюють рівні величини зазорів, ось симетрії вала шпиндельної опори на постійних Α А Α B B B магнітах суміщають з початками систем координат Χ О Y і X O Y , вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхування між UA 102029 C2 (12) UA 102029 C2 групами силових магнітних відштовхувачів, установлених по однойменних осях систем Б Б Б Г Г Г координат Χ О Y і X O Y , і магнітами вала опори при заданій величині зсуву вала опори по цих осях і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутову швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту φ=0, N разів вимірюють величини А Α B B зазорів під датчиками величин зазорів, установлених по півосях +Х ,+Υ ,+Х ,+Υ систем Α А Α B B B координат Χ О Y і X O Y і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту φ=0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання ω1, яка задовольняє нерівностям ω1 ωкр вала і ω ωкр пл, на куту φ = 0 повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками А A В B Α А Α B B B величин зазорів, установлених по півосях +Х ,+Y ,+Х ,+Υ систем координат Χ О Y і X O Y і обчислюють їх асимптотично незміщі оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в плоскостях установки датчиків величин Α А Α B B B зазорів по осях систем координат Χ О Y і X O Y і розраховуються величини зсуву Α А Α B B B геометричної осі обертання вала під дією систем координат Χ О Y і X O Y і розраховуються величини зсуву геометричної осі обертання вала і кути нахилу векторів динамічного А В А А А B B B навантаження на вал опори до осей X і X систем координат X 0 Υ і Χ Ο Υ , на кутовій швидкості ω1, балансують вал опори і установлюють під датчиками величин зазорів, Α Α Β Β Α А Α B B B установлених по півосях +Χ ,+Υ ,+Χ ,+Υ систем координат Χ О Y і X O Y , величини зазорів, які забезпечують мінімум нормі різниць 2 0 0 0 0 Z 1 Z 11 Z 2 Z 21 2 2 0 0 0 0 1 Z 5 Z 51 Z 6 Z 61 2 і наближають геометричну вісь обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю, якщо норма різниць не дорівнює нулю з кроком Γω збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на -му кроці підвищення кутової швидкості обертання вала на куту повороту φ=0 N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях Α Α Β Β Α А Α B B B +Χ ,+Υ ,+Χ ,+ Υ систем координат Χ О Y і X O Y і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори + 0, =, =2,...,=k,...,=360° - N разів нa N обертах вала вимірюють величини зазорів під датчиками величин зазорів, А A В В Α А Α B B B установлених по півосях +Х ,+Y ,+Х +Υ систем координат Χ О Y і X O Y , обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками величин зазорів, установлених по півосях А A В B Α А Α B B B +Х ,+Y ,+Х ,+Y систем координат Χ О Y і X O Y на дискретах кута повороту вала опори порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення, 0 0 0 0 , Z5 , Z6 де: Z1 , Z 2 - асимптотично незміщені оцінки величин зазорів під датчиками А Α Β В Α А Α B B B величин зазорів, установлених по півосях +Х +Υ ,+Χ ,+Υ систем координат Χ О Y і X O Y на куту φ-0 повороту вала при ωвала=0; Z11 0 , Z 21 0 , Z 51 0 , Z 61 0 - асимптотично незміщені оцінки величин зазорів під датчиками А А Β В Α А Α B B B величин зазорів, установлених по півосях +Х ,+Υ +Χ ,+Υ систем координат Χ О Y і X O Y на куту φ = 0 повороту вала при ωвала=ω1. UA 102029 C2 UA 102029 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до верстатобудування і може використовуватись в прецизійних верстатах для обробки точних елементів оптики і механіки. Відомий патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори №25727 А від 30.10.98р., що забезпечує стабілізацію радіального положення осі обертання вала аеростатичної шпиндельної опори при дії радіального навантаження. Цей пристрій вибраний як прототип. Побудова пристрою прототипу основується на способі вимірювання координат радіального положення осі обертових елементів верстатів [патент України № 25726 А від 30.10. 1998р.]. Пристрій прототипу забезпечує вимірювання координат радіального положення осі обертання вала в двох перерізах шпиндельної опори, вибір її незміщеного положення і запобігання відхилення радіального положення осі обертання вала опори відносно вибраного незміщеного положення під дією радіального навантаження, тобто стабілізацію радіального положення осі обертання. Для здійснення стабілізації радіального положення осі обертання вала опори: - Визначаються параметри еліпса з двох перерізах вала опори плоскостями установки датчиків величин зазорів. - Центри еліпсів в перерізах вала опори приймаються як точки, через які проходить вісь обертання. - Визначаються координати датчиків величин зазорів, установлених в двох перерізах шпиндельної опори по осях двох систем координат в кожному перерізі, центри яких суміщені з центрами згаданих еліпсів. - По вимірюванню величин зазорів під датчикам величин зазорів записуються системи рівнянь, які визначають координати осі обертання вала опори, і обчислюються координати осі обертання вала шпиндельної опори. - Визначається незміщене положення осі обертання вала опори. - Формується масив опорних зазорів під датчиками величин зазорів, які на дискретах кута повороту вала опори відповідають незміщеному радіальному положенню осі обертання. - В процесі стабілізації радіального положення осі обертання вала опори поточні величини зазорів під датчиками величин зазорів на дискретах кута повороту вала опори порівнюються з величинами відповідних опорних зазорів. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження, які відповідають величині відхиленню поточних величин зазорів від опорних, на компенсатори радіального зміщення осі обертання, чим запобігається зміщення осі обертання з високою точністю. Задача, що вирішується, полягає в розробці способу стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який основується на здатності вала радіальної шпиндельної опори самостійно центруватися в пружному середовищі магнітного поля силових магнітних підвісів цієї опори і інваріантний до форми перерізу вала радіальної шпиндельної опори. Це досягається тим, що спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів; вироблення сигналів неузгодження на силові магнітні підвіси, згідно винаходу, датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на A A A В В В постійних магнітах в перерізах по А-А і В-В опори по осям систем координат X O Y і X O Y по зовнішнім сторонам магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала шпиндельної опори на постійних магнітах по осям систем Б Б Б Г Г Г координат Χ О Y і X О Υ , осі яких паралельні між собою і паралельні осям систем координат A A A В В В X O Y і X O Y , під датчиками величин зазорів, установлених по однойменних осям систем A A A В В В координат X O Y і X O Y , установлюють рівні величини зазорів і ось симетрії вала A A A шпиндельної опори на постійних магнітах суміщають з початками систем координат X O Y і В В В X O Y , ось симетрії вала приймають в якості геометричної осі обертання вала опори, розраховують силу відштовхування між групами силових магнітних відштовхувачів, Б Б Б Г Г Г установлених по однойменних осям систем координат Χ О Y і X О Υ , і магнітами вала опори при заданій величині зсуву вала опори по цим осям і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутову швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту φ = 0, N разів вимірюють величини зазорів під датчиками величин зазорів, 2 UA 102029 C2 Α Α В В A A A В В В установлених по півосям +Χ , + Υ , + Χ , + Υ систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту φ = 0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається в якості незміщеного, валу опори задають швидкість обертання
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of stabilizing radial position of axis of rotation of shaft of radial spindle bearing on permanent magnets
Автори англійськоюHrytsenko Volodymyr Illich, Tarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ стабилизации радиального положения оси вращения вала радиальной шпиндельной опоры на постоянных магнитах
Автори російськоюГриценко Владимир Ильич, Тарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06, B23B 19/00
Мітки: постійних, осі, радіальної, магнітах, положення, обертання, опори, радіального, шпиндельної, стабілізації, вала, спосіб
Код посилання
<a href="https://ua.patents.su/21-102029-sposib-stabilizaci-radialnogo-polozhennya-osi-obertannya-vala-radialno-shpindelno-opori-na-postijjnikh-magnitakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах</a>
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72701
Опубліковано: 27.08.2012
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович, Гриценко Володимир Ілліч
МПК: B23B 19/00, F16C 32/06
Мітки: вала, магнітах, стабілізації, опори, радіального, осі, постійних, спосіб, положення, радіальної, обертання, шпиндельної
Формула / Реферат:
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні...
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72700
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
МПК: F16C 32/06
Мітки: радіальної, шпиндельної, опори, вала, магнітах, балансування, постійних, пристрій
Формула / Реферат:
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах, який включає датчики величин зазорів, вимірювачі величин зазорів, обчислювач, який відрізняється тим, що включає складений вал шпиндельної опори, який складається з трьох співвісно встановлених валів, на кінцях середнього вала в екранах встановлені постійні магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 102028
Опубліковано: 27.05.2013
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: радіальної, шпиндельної, вала, магнітах, постійних, балансування, опори, пристрій
Формула / Реферат:
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах, який включає корпус шпиндельної опори на постійних магнітах, датчики величин зазорів, вимірювачі величин зазорів, обчислювач, який відрізняється тим, що включає складовий вал шпиндельної опори, який складається з трьох співвісно встановлених валів, на кінцях середнього вала в екранах встановлені постійні магніти вала у вигляді порожнистих циліндрів з полюсами на...
Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори
Номер патенту: 69126
Опубліковано: 16.08.2004
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: положення, опори, аеростатичної, шпиндельної, осі, радіального, спосіб, стабілізації, обертання, вала
Формула / Реферат:
Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори, який включає апроксимацію еліпсами обвідних перерізів вала аеростатичної шпиндельної опори площинами установки датчиків величин зазорів, розрахунок координат датчиків величин зазорів, установлених по осях систем координат з суміщеними початками, які лежать в площинах установки датчиків величин зазорів, розрахунок і оцінку координат осі обертання...
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори
Номер патенту: 98995
Опубліковано: 10.07.2012
Автори: Левін Ігор Олексійович, Тарасов Віктор Олексійович
МПК: B23B 19/00
Мітки: аеростатичної, положення, осі, опори, стабілізації, радіальної, пристрій, вала, обертання, радіального
Формула / Реферат:
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори, який містить компенсатори радіального зміщення осі обертання вала радіальної аеростатичної опори, вимірювачі величин зазорів, вимірювач кута повороту вала радіальної аеростатичної опори, обчислювач, операційні підсилювачі, диференційні підсилювачі сигналів неузгодження, перемикачі "пряме - вимк. - зворотне", вимикачі "увімк. -...
Попередній патент: Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Наступний патент: Економічна бочка для рідких матеріалів
Випадковий патент: Каркасно-тентова конструкція