Система та спосіб визначення точного напрямку курсу транспортного засобу

Формула / Реферат
1. Спосіб визначення точного напрямку курсу транспортного засобу, причому спосіб включає:
визначення похибки вивірення курсу, яка є різницею між визначеним глобальною навігаційною супутниковою системою (GNSS) напрямком руху транспортного засобу та нерозв'язаним визначеним Інерціальним вимірювальним блоком (IMU) курсом транспортного засобу;
корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону;
корекцію нерозв'язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу;
визначення, чи є нерозв'язаний IMU-курс, після корекції похибки вивірення курсу, по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; та
розрахунок точного напрямку курсу шляхом зміщення нерозв'язаного IMU-курсу, після корекції похибки вивірення курсу, на 180 градусів, якщо нерозв'язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу.
2. Спосіб за п. 1, який відрізняється тим, що включає визначення, чи рухається транспортний засіб у прямому чи зворотному напрямку, шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу.
3. Спосіб за п. 1 або п. 2, який відрізняється тим, що корекцію нерозв'язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу включає розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу.
4. Спосіб за п. 3, який відрізняється тим, що точний напрямок курсу розраховують як:
неточний IMU-курс з корекцією похибки або
неточний IMU-курс з корекцією похибки, зміщений на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу.
5. Спосіб за п. 4, який відрізняється тим, що визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу, в оптимальному варіанті включає апроксимацію фактичного напрямку носа транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу.
6. Спосіб за п. 5, який відрізняється тим, що включає порівняння апроксимованого фактичного напрямку носа транспортного засобу з неточним IMU-курсом з корекцією похибки.
7. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху.
8. Спосіб визначення переміщення транспортного засобу переднім чи заднім ходом, причому спосіб включає:
отримання визначеного Глобальною навігаційною супутниковою системою (GNSS) напрямку руху для транспортного засобу від GNSS-блока транспортного засобу;
отримання визначеного Інерціальним вимірювальним блоком (IMU) нерозв'язаного курсу транспортного засобу від IMU транспортного засобу;
визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв'язаним IMU-курсом;
корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка вивірення курсу перебуває поза межами заданого діапазону;
розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу;
визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу;
розрахунок точного напрямку курсу, який є:
неточним IMU-курсом з корекцією похибки або
неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу; та
порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу, таким чином, щоб визначати переміщення транспортного засобу переднім чи заднім ходом.
9. Спосіб за п. 8, який відрізняється тим, що включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху.
10. Спосіб за п. 8 або п. 9, який відрізняється тим, що визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу, включає апроксимацію фактичного напрямку носа транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу.
11. Спосіб за п. 10, який відрізняється тим, що включає порівнянняапроксимованого фактичного напрямку носа транспортного засобу з неточним IMU-курсом з корекцією похибки.
12. Спосіб фіксації похибки вивірення курсу, причому спосіб включає: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху транспортного засобу та нерозв'язаним IMU-курсом транспортного засобу;
корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка вивірення курсу перебуває поза межами заданого діапазону.
13. Спосіб за п. 12, який відрізняється тим, що включає випробування, чи перебуває похибка вивірення курсу у межах заданого діапазону від ≥-90 градусів до ≤+90 градусів.
14. Система для застосування у визначенні точного напрямку курсу транспортного засобу, причому система включає:
GNSS-блок, закріплений на транспортному засобі, причому GNSS-блок призначається для розрахунку напрямку руху транспортного засобу;
IMU-блок, закріплений на транспортному засобі, причому IMU-блок призначається для розрахунку нерозв'язаного IMU-курсу транспортного засобу;
модуль обробки, який включає процесор, запрограмований для:
визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв'язаним IMU-курсом;
корекції похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону;
корекції нерозв'язаного IMU-курсу з використанням похибки вивірення курсу,
визначення, чи є нерозв'язаний IMU-курс по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу;
розрахунку точного курсу шляхом зміщення нерозв'язаного IMU-курсу на 180 градусів, якщо нерозв'язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу.
15. Система за п. 14, яка відрізняється тим, що процесор є запрограмованим на корекцію нерозв'язаного IMU-курсу шляхом розрахунку неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу.
16. Система за п. 15, яка відрізняється тим, що процесор є запрограмованим на розрахунок точного напрямку курсу, який є:
неточним IMU-курсом з корекцією похибки або
неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки є по суті протилежним фактичному напрямкові носа транспортного засобу.
17. Система за п. 16, яка відрізняється тим, що процесор є запрограмованим на визначення переміщення транспортного засобу переднім чи заднім ходом шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу.
Текст
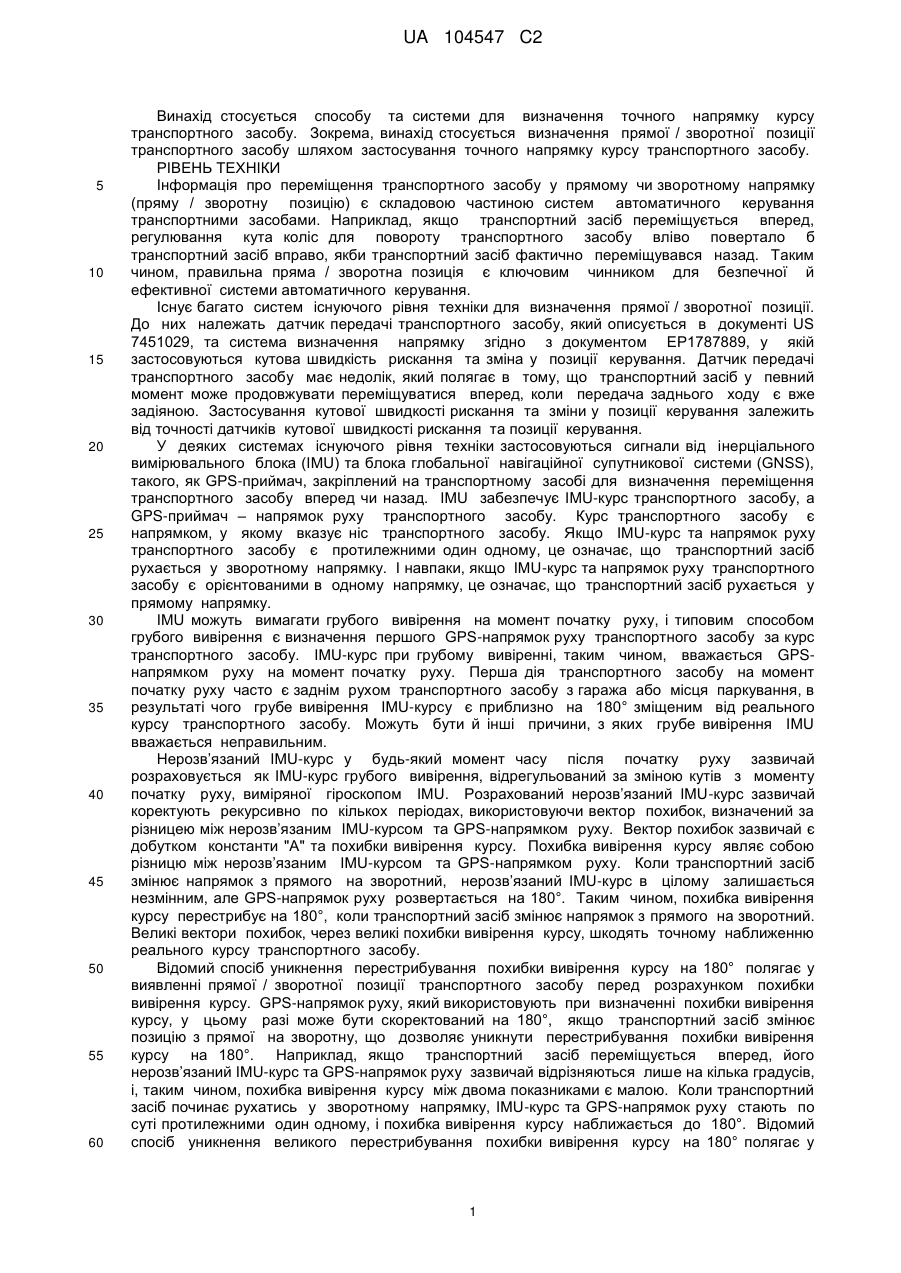
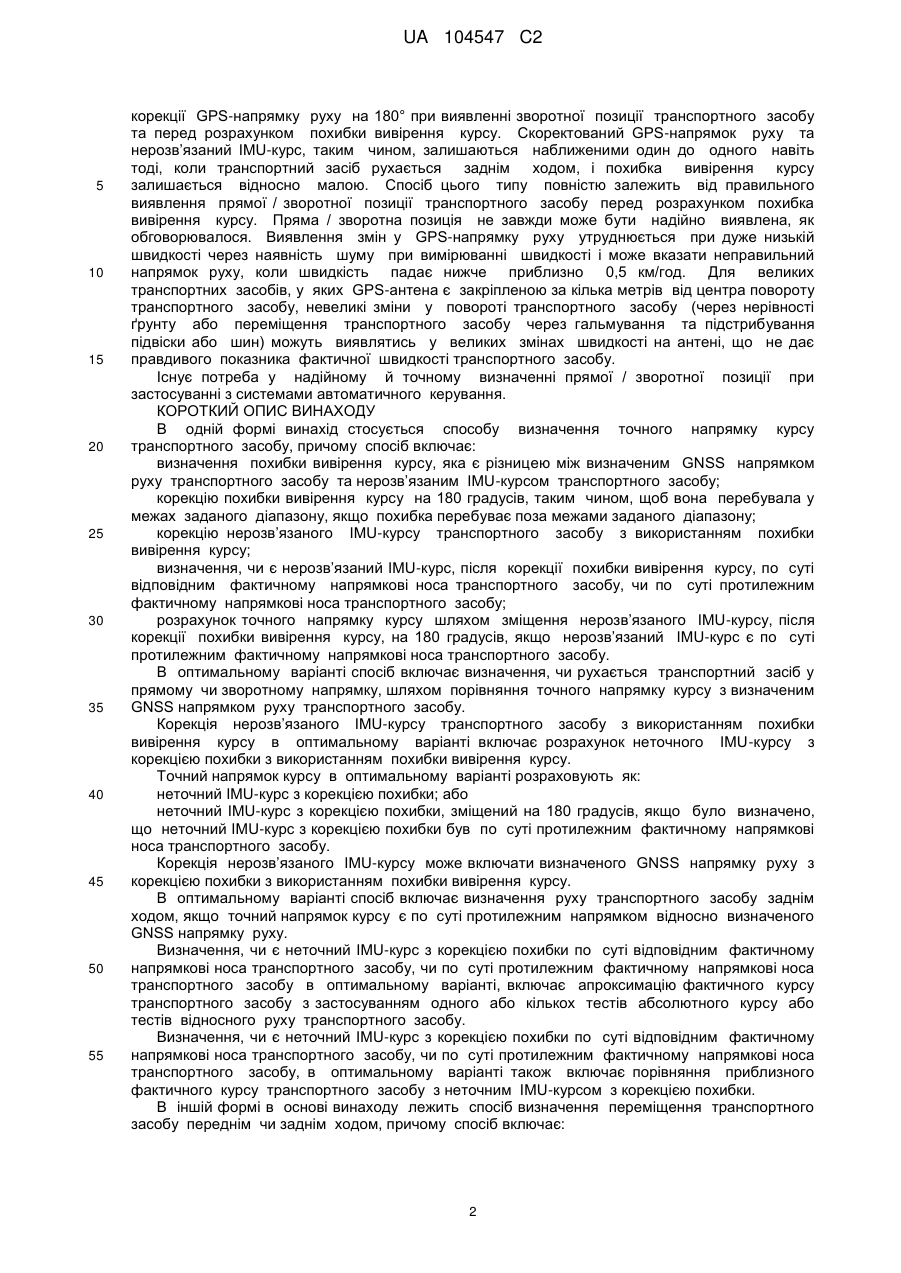
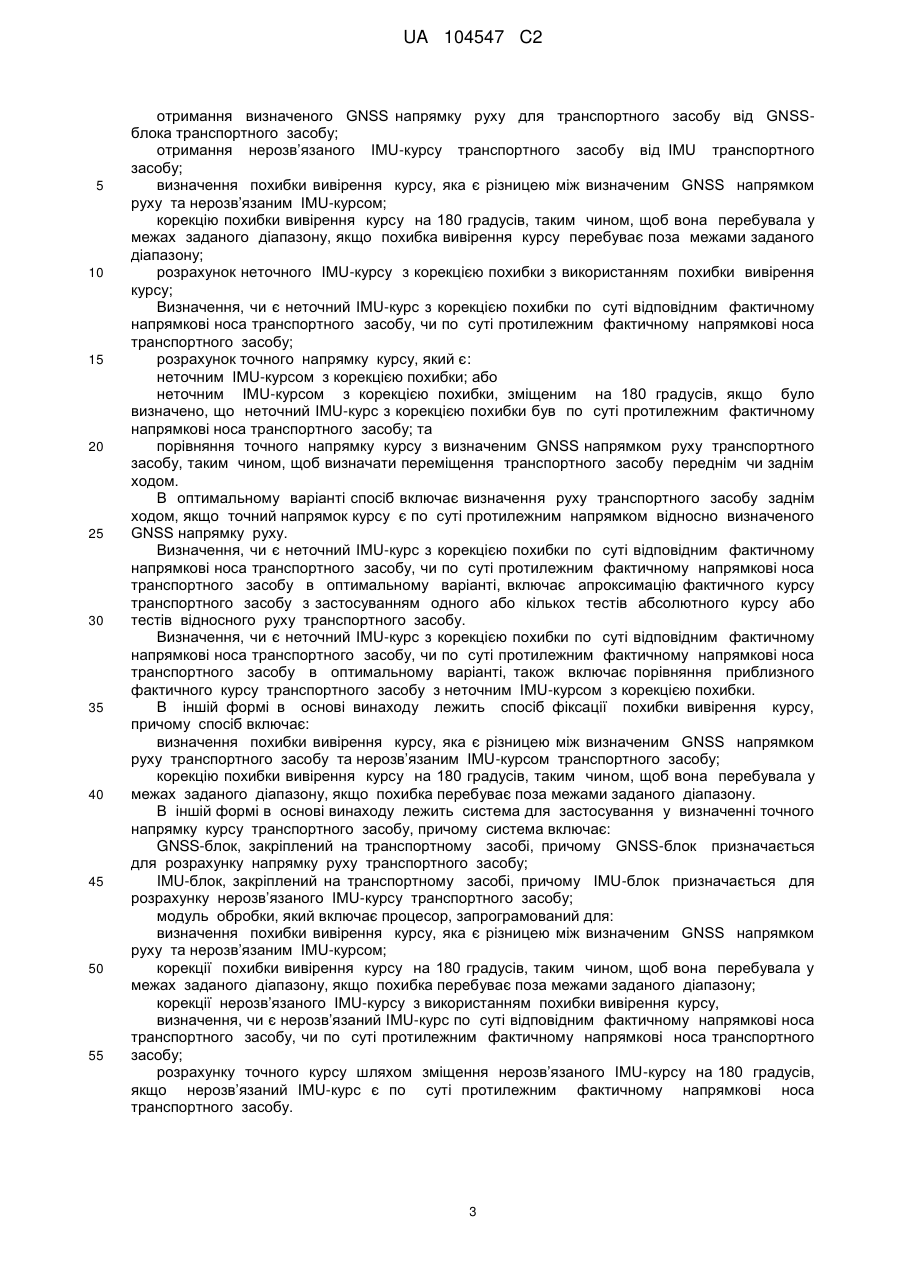
Реферат: Точний напрямок курсу розраховують для визначення прямої/зворотної позиції транспортного засобу. На етапі 100 визначають похибку вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв'язаним IMU-курсом транспортного засобу. Похибку вивірення курсу коректують на 180° таким чином, щоб вона перебувала у межах заданого діапазону на етапі 200. Нерозв'язаний IMU-курс транспортного засобу 10 коректують з використанням похибки вивірення курсу для визначення неточного IMU-курс з корекцією похибки на етапі 300. На етапі 400 визначають, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу. Точний напрямок курсу розраховують на етапі 500 шляхом зміщення неточного IMU-курсу з корекцією похибки на 180 градусів, якщо неточний IMU-курс з корекцією похибки є по суті протилежним фактичному напрямкові носа транспортного засобу. Пряму/зворотну позицію визначають шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. UA 104547 C2 (12) UA 104547 C2 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується способу та системи для визначення точного напрямку курсу транспортного засобу. Зокрема, винахід стосується визначення прямої / зворотної позиції транспортного засобу шляхом застосування точного напрямку курсу транспортного засобу. РІВЕНЬ ТЕХНІКИ Інформація про переміщення транспортного засобу у прямому чи зворотному напрямку (пряму / зворотну позицію) є складовою частиною систем автоматичного керування транспортними засобами. Наприклад, якщо транспортний засіб переміщується вперед, регулювання кута коліс для повороту транспортного засобу вліво повертало б транспортний засіб вправо, якби транспортний засіб фактично переміщувався назад. Таким чином, правильна пряма / зворотна позиція є ключовим чинником для безпечної й ефективної системи автоматичного керування. Існує багато систем існуючого рівня техніки для визначення прямої / зворотної позиції. До них належать датчик передачі транспортного засобу, який описується в документі US 7451029, та система визначення напрямку згідно з документом EP1787889, у якій застосовуються кутова швидкість рискання та зміна у позиції керування. Датчик передачі транспортного засобу має недолік, який полягає в тому, що транспортний засіб у певний момент може продовжувати переміщуватися вперед, коли передача заднього ходу є вже задіяною. Застосування кутової швидкості рискання та зміни у позиції керування залежить від точності датчиків кутової швидкості рискання та позиції керування. У деяких системах існуючого рівня техніки застосовуються сигнали від інерціального вимірювального блока (IMU) та блока глобальної навігаційної супутникової системи (GNSS), такого, як GPS-приймач, закріплений на транспортному засобі для визначення переміщення транспортного засобу вперед чи назад. IMU забезпечує IMU-курс транспортного засобу, а GPS-приймач – напрямок руху транспортного засобу. Курс транспортного засобу є напрямком, у якому вказує ніс транспортного засобу. Якщо IMU-курс та напрямок руху транспортного засобу є протилежними один одному, це означає, що транспортний засіб рухається у зворотному напрямку. І навпаки, якщо IMU-курс та напрямок руху транспортного засобу є орієнтованими в одному напрямку, це означає, що транспортний засіб рухається у прямому напрямку. IMU можуть вимагати грубого вивірення на момент початку руху, і типовим способом грубого вивірення є визначення першого GPS-напрямок руху транспортного засобу за курс транспортного засобу. IMU-курс при грубому вивіренні, таким чином, вважається GPSнапрямком руху на момент початку руху. Перша дія транспортного засобу на момент початку руху часто є заднім рухом транспортного засобу з гаража або місця паркування, в результаті чого грубе вивірення IMU-курсу є приблизно на 180° зміщеним від реального курсу транспортного засобу. Можуть бути й інші причини, з яких грубе вивірення IMU вважається неправильним. Нерозв’язаний IMU-курс у будь-який момент часу після початку руху зазвичай розраховується як IMU-курс грубого вивірення, відрегульований за зміною кутів з моменту початку руху, виміряної гіроскопом IMU. Розрахований нерозв’язаний IMU-курс зазвичай коректують рекурсивно по кількох періодах, використовуючи вектор похибок, визначений за різницею між нерозв’язаним IMU-курсом та GPS-напрямком руху. Вектор похибок зазвичай є добутком константи "A" та похибки вивірення курсу. Похибка вивірення курсу являє собою різницю між нерозв’язаним IMU-курсом та GPS-напрямком руху. Коли транспортний засіб змінює напрямок з прямого на зворотний, нерозв’язаний IMU-курс в цілому залишається незмінним, але GPS-напрямок руху розвертається на 180°. Таким чином, похибка вивірення курсу перестрибує на 180°, коли транспортний засіб змінює напрямок з прямого на зворотний. Великі вектори похибок, через великі похибки вивірення курсу, шкодять точному наближенню реального курсу транспортного засобу. Відомий спосіб уникнення перестрибування похибки вивірення курсу на 180° полягає у виявленні прямої / зворотної позиції транспортного засобу перед розрахунком похибки вивірення курсу. GPS-напрямок руху, який використовують при визначенні похибки вивірення курсу, у цьому разі може бути скоректований на 180°, якщо транспортний засіб змінює позицію з прямої на зворотну, що дозволяє уникнути перестрибування похибки вивірення курсу на 180°. Наприклад, якщо транспортний засіб переміщується вперед, його нерозв’язаний IMU-курс та GPS-напрямок руху зазвичай відрізняються лише на кілька градусів, і, таким чином, похибка вивірення курсу між двома показниками є малою. Коли транспортний засіб починає рухатись у зворотному напрямку, IMU-курс та GPS-напрямок руху стають по суті протилежними один одному, і похибка вивірення курсу наближається до 180°. Відомий спосіб уникнення великого перестрибування похибки вивірення курсу на 180° полягає у 1 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 корекції GPS-напрямку руху на 180° при виявленні зворотної позиції транспортного засобу та перед розрахунком похибки вивірення курсу. Скоректований GPS-напрямок руху та нерозв’язаний IMU-курс, таким чином, залишаються наближеними один до одного навіть тоді, коли транспортний засіб рухається заднім ходом, і похибка вивірення курсу залишається відносно малою. Спосіб цього типу повністю залежить від правильного виявлення прямої / зворотної позиції транспортного засобу перед розрахунком похибка вивірення курсу. Пряма / зворотна позиція не завжди може бути надійно виявлена, як обговорювалося. Виявлення змін у GPS-напрямку руху утруднюється при дуже низькій швидкості через наявність шуму при вимірюванні швидкості і може вказати неправильний напрямок руху, коли швидкість падає нижче приблизно 0,5 км/год. Для великих транспортних засобів, у яких GPS-антена є закріпленою за кілька метрів від центра повороту транспортного засобу, невеликі зміни у повороті транспортного засобу (через нерівності ґрунту або переміщення транспортного засобу через гальмування та підстрибування підвіски або шин) можуть виявлятись у великих змінах швидкості на антені, що не дає правдивого показника фактичної швидкості транспортного засобу. Існує потреба у надійному й точному визначенні прямої / зворотної позиції при застосуванні з системами автоматичного керування. КОРОТКИЙ ОПИС ВИНАХОДУ В одній формі винахід стосується способу визначення точного напрямку курсу транспортного засобу, причому спосіб включає: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху транспортного засобу та нерозв’язаним IMU-курсом транспортного засобу; корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону; корекцію нерозв’язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу; визначення, чи є нерозв’язаний IMU-курс, після корекції похибки вивірення курсу, по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; розрахунок точного напрямку курсу шляхом зміщення нерозв’язаного IMU-курсу, після корекції похибки вивірення курсу, на 180 градусів, якщо нерозв’язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу. В оптимальному варіанті спосіб включає визначення, чи рухається транспортний засіб у прямому чи зворотному напрямку, шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. Корекція нерозв’язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу в оптимальному варіанті включає розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу. Точний напрямок курсу в оптимальному варіанті розраховують як: неточний IMU-курс з корекцією похибки; або неточний IMU-курс з корекцією похибки, зміщений на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу. Корекція нерозв’язаного IMU-курсу може включати визначеного GNSS напрямку руху з корекцією похибки з використанням похибки вивірення курсу. В оптимальному варіанті спосіб включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху. Визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу в оптимальному варіанті, включає апроксимацію фактичного курсу транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу. Визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу, в оптимальному варіанті також включає порівняння приблизного фактичного курсу транспортного засобу з неточним IMU-курсом з корекцією похибки. В іншій формі в основі винаходу лежить спосіб визначення переміщення транспортного засобу переднім чи заднім ходом, причому спосіб включає: 2 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 отримання визначеного GNSS напрямку руху для транспортного засобу від GNSSблока транспортного засобу; отримання нерозв’язаного IMU-курсу транспортного засобу від IMU транспортного засобу; визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв’язаним IMU-курсом; корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка вивірення курсу перебуває поза межами заданого діапазону; розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу; Визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; розрахунок точного напрямку курсу, який є: неточним IMU-курсом з корекцією похибки; або неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу; та порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу, таким чином, щоб визначати переміщення транспортного засобу переднім чи заднім ходом. В оптимальному варіанті спосіб включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху. Визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу в оптимальному варіанті, включає апроксимацію фактичного курсу транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу. Визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу в оптимальному варіанті, також включає порівняння приблизного фактичного курсу транспортного засобу з неточним IMU-курсом з корекцією похибки. В іншій формі в основі винаходу лежить спосіб фіксації похибки вивірення курсу, причому спосіб включає: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху транспортного засобу та нерозв’язаним IMU-курсом транспортного засобу; корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону. В іншій формі в основі винаходу лежить система для застосування у визначенні точного напрямку курсу транспортного засобу, причому система включає: GNSS-блок, закріплений на транспортному засобі, причому GNSS-блок призначається для розрахунку напрямку руху транспортного засобу; IMU-блок, закріплений на транспортному засобі, причому IMU-блок призначається для розрахунку нерозв’язаного IMU-курсу транспортного засобу; модуль обробки, який включає процесор, запрограмований для: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв’язаним IMU-курсом; корекції похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону; корекції нерозв’язаного IMU-курсу з використанням похибки вивірення курсу, визначення, чи є нерозв’язаний IMU-курс по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; розрахунку точного курсу шляхом зміщення нерозв’язаного IMU-курсу на 180 градусів, якщо нерозв’язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу. 3 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 60 Процесор в оптимальному варіанті є запрограмованим на корекцію нерозв’язаного IMUкурсу шляхом розрахунку неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу. Процесор в оптимальному варіанті є запрограмованим на розрахунок точного напрямку курсу, який є: неточним IMU-курсом з корекцією похибки; або неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки є по суті протилежним фактичному напрямкові носа транспортного засобу. Процесор в оптимальному варіанті є запрограмованим на визначення переміщення транспортного засобу переднім чи заднім ходом шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. Заданий діапазон в оптимальному варіанті охоплює від ≥ -90 градусів до ≤ + 90 градусів. КОРОТКИЙ ОПИС ФІГУР Виключно для прикладу оптимальні варіанти втілення винаходу далі повніше описуються з посиланням на супровідні фігури, серед яких: ФІГ. 1 є схематичною горизонтальною проекцією транспортного засобу, який включає систему згідно з одним варіантом втілення винаходу; ФІГ. 2 є загальною блок-схемою способу визначення точного напрямку курсу транспортного засобу з ФІГ. 1 та визначення переміщення транспортного засобу переднім чи заднім ходом; ФІГ. 3 є більш детальною блок-схемою способу визначення точного напрямку курсу транспортного засобу з ФІГ. 1 та визначення переміщення транспортного засобу переднім чи заднім ходом; ФІГ. 4 є блок-схемою способу апроксимації фактичного курсу транспортного засобу, який використовується як вхідний параметр для способу, який пояснюється на ФІГ. 3. ФІГ. 5A є видом у плані транспортного засобу під час грубого вивірення IMU транспортного засобу, з показом транспортного засобу, який переміщується у південному напрямку заднім ходом; ФІГ. 5B є видом у плані транспортного засобу з ФІГ. 5A, який переміщується переднім ходом у східному напрямку; ФІГ. 6A є видом у плані транспортного засобу під час грубого вивірення IMU транспортного засобу, з показом транспортного засобу, який переміщується переднім ходом у північному напрямку; ФІГ. 6B є видом у плані транспортного засобу з ФІГ. 6A, який переміщується переднім ходом у східному напрямку; ФІГ. 7A є видом у плані транспортного засобу під час грубого вивірення IMU транспортного засобу, з показом транспортного засобу, який переміщується у південному напрямку заднім ходом; ФІГ. 7B є видом у плані транспортного засобу з ФІГ. 7A, який переміщується у західному напрямку заднім ходом; і ФІГ. 8 є схематичним планом з показом змін знака (+ або -) кутової швидкості рискання та бокового прискорення під час різних передніх та задніх переміщень транспортного засобу з ФІГ. 1. ДЕТАЛЬНИЙ ОПИС ФІГУР ФІГ. 1 показує транспортний засіб 10, який включає систему 12 для виявлення прямої / зворотної позиції для визначення, чи рухається транспортний засіб у прямому чи зворотному напрямку. З метою виявлення прямої / зворотної позиції система 12 визначає точний напрямок курсу транспортного засобу 10. Система 12 включає блок Глобальної навігаційної супутникової системи (GNSS) 14, блок IMU (Інерціальний вимірювальний блок) 16 та модуль обробки 18. Модуль обробки 18 перебуває у сполученні з GNSS-блоком 14 та IMUблоком 16. GNSS-блок 14 використовує супутникові сигнали для розрахунку швидкості та напрямку переміщення GNSS-блока 14. GNSS-блок 14 зазвичай є GPS-приймачем, який використовує GPS-супутники для розрахунку та виведення показників швидкості та напрямку переміщення. GNSS-блок 14 є закріпленим на транспортному засобі 10. Напрямок переміщення GNSS-блока 14, таким чином, вважається напрямком руху транспортного засобу 10. Визначений GNSS напрямок руху є нечутливим до переміщення транспортного засобу переднім чи заднім ходом, оскільки в ньому враховується лише відносна зміна позиції самої GNSS-антени. Врахування лише визначеного GNSS напрямку руху не 4 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 60 виявляє, чи є швидкість, визначена GNSS-блоком 14, зумовленою прямим чи зворотним переміщенням транспортного засобу 10. Визначений GNSS напрямок руху транспортного засобу 10 передається на модуль обробки 18 як вхідний показник визначеного GNSS напрямку руху. IMU-блок 16 включає певну кількість датчиків для визначення позиції транспортного засобу, включаючи нерозв’язаний IMU-курс транспортного засобу. Курс транспортного засобу є напрямком, у якому вказує ніс транспортного засобу. Датчики включають гіроскопи та акселерометри, як відомо спеціалістам у даній галузі. Фактичний курс транспортного засобу 10 вказується стрілкою 22 на ФІГ. 1 і є фактичним напрямком носа транспортного засобу. Фактичний курс 22 є спрямованим уздовж подовжньої осі від задньої частини 24 транспортного засобу 10 до передньої частини 26 на носі транспортного засобу 10. Курс транспортного засобу 10, апроксимований IMU-блоком 16, передається на модуль обробки 18 як вхідний показник нерозв’язаного IMU-курсу. IMU-блок 16 завжди визначає фактичний курс 22, незалежно від того, чи переміщується транспортний засіб 10 вперед, чи назад. Коли транспортний засіб рухається заднім ходом по прямій лінії, визначений GNSS напрямок руху та IMU-курс зазвичай є приблизно на 180° протилежними один одному. IMU-блок 16 вимагає грубого вивірення курсу транспортного засобу, коли транспортний засіб 10 починає рухатися. Грубе вивірення може бути першим визначеним GNSS напрямком руху транспортного засобу 10 або бути напрямком носа транспортного засобу, визначеним компасом транспортного засобу 10. Нерозв’язаний IMU-курс у будь-який конкретний момент часу зазвичай розраховують як грубо вивірений курс, скоректований зміною кутів, виміряною гіроскопом до даного моменту часу. Модуль обробки 18 включає процесор 20, на якому виконується програма для програмування процесора 20 для виконання логічних кроків та розрахунків. Процесор 20 отримує визначений GNSS напрямок руху як вхідний показник та нерозв’язаний IMU-курс як вхідний показник. Процесор 20 використовує визначений GNSS напрямок руху, нерозв’язаний IMU-курс та різні інші вхідні показники та логіку для визначення переміщення транспортного засобу 10 переднім чи заднім ходом. ФІГ. 2 показує основну блок-схему, яка пояснює, яким чином система 12 визначає точний напрямок курсу транспортного засобу з ФІГ. 1 і визначає переміщення транспортного засобу 10 переднім чи заднім ходом. Етапи на блок-схемі є етапами, які виконуються процесором 20 модуля обробки 18 транспортного засобу 10. На першому етапі 100, визначають похибку вивірення курсу. Похибка вивірення курсу є різницею між визначеним GNSS напрямком руху транспортного засобу та нерозв’язаним IMU-курсом транспортного засобу. На другому етапі 200 похибку вивірення курсу коректують на 180° таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону. Якщо похибка вивірення курсу перебуває у межах заданого діапазону, ця похибка вивірення курсу не коректується (або можна сказати, що вона коректується на 0°). На третьому етапі 300 нерозв’язаний IMU-курс транспортного засобу 10 коректують з використанням похибки вивірення курсу для визначення неточного IMU-курс з корекцією похибки. На четвертому етапі 400 визначають, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу 10 або по суті протилежним фактичному напрямкові носа транспортного засобу 10. На п’ятому етапі 500 точний напрямок курсу розраховують шляхом зміщення неточного IMU-курсу з корекцією похибки на 180 градусів, якщо неточний IMU-курс з корекцією похибки є по суті протилежним фактичному напрямкові носа транспортного засобу 10. На останньому етапі 600 пряму / зворотну позиція транспортного засобу 10 визначають шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. Етапи з 100 по 600 детальніше обговорюються й пояснюються з посиланням на ФІГ. 3. ФІГ. 3 показує детальну блок-схему способу визначення прямої / зворотної позиції транспортного засобу 10. Загальні етапи з 100 по 600 з ФІГ. 2 обведено пунктирними лініями на ФІГ. 2. На етапі 100 виконують розрахунок 110 похибки вивірення курсу. Процесор 20 розраховує похибку вивірення курсу, яка є різницею між нерозв’язаним IMU-курсом та визначеним GNSS напрямком руху. Нерозв’язаний IMU-курс отримують від IMU-блока 16, а визначений GNSS напрямок руху – від GNSS-блока 14. Розрахунок похибки вивірення курсу виражається як: похибка вивірення курсу = нерозв’язаний IMU-курс – визначений GNSS напрямок руху. 5 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 На етапі 200 похибку вивірення курсу коректують (у разі необхідності) на півкола 180° таким чином, щоб вона перебувала у межах заданого діапазону від ≥-90° до ≤+90°, якщо похибка перебуває поза межами діапазону. Корекція похибки вивірення курсу до значення у межах діапазону від ≥-90° до ≤+90° називається фіксацією похибки 210. Фіксація похибки 210 логічно виражається таким чином: якщо похибка > +90°, то похибка = похибка - 180°; якщо похибка < -90°, то похибка = похибка +180°. Цей розрахунок може здійснюватись або багаторазово, або через використання залишку від операції ділення, оскільки обидва способи є математично рівноцінними. Фіксація похибки вивірення курсу 210 змушує завжди тримати похибку вивірення курсу у межах від ≥-90° до ≤+90°. Якщо похибка вивірення курсу перебуває у межах від ≥-90° до ≤+90° до фіксації, ця похибка вивірення курсу не коректується. Важливим є те, що похибка фіксується у межах від ≥-90° до ≤+90°, незалежно від того, чи переміщується транспортний засіб 10 вперед чи назад, і незалежно від виявлення прямої / зворотної позиції транспортного засобу. На етапі 300 нерозв’язаний IMU-курс розв’язується через розрахунок 310 неточного IMUкурсу з корекцією похибки з використанням похибки вивірення курсу (незалежно від наявності корекції). Неточний IMU-курс з корекцією похибки є нерозв’язаним IMU-курсом, отриманим від IMU 16, скоректованим вектором похибок, тобто: неточний IMU-курс з корекцією похибки = нерозв’язаний IMU-курс – A * похибка вивірення курсу. A зазвичай є константою, меншою за 0,1 у разі додаткового фільтра, а у разі фільтра Кальмана значення A з часом змінюється зі збіганням фільтра. Для зрозумілості цього документа вона вважається константою. Наступний етап 400 полягає у визначенні, чи є неточний IMU-курс з корекцією похибки по суті відповідним напрямкові фактичного курсу 22 транспортного засобу 10, чи по суті протилежним напрямкові фактичного курсу 22. Він включає фазу порівняння 410 неточного IMU-курсу з корекцією похибки з апроксимованим фактичним курсом 700 транспортного засобу 10. Апроксимований фактичний курс 700 розраховують, застосовуючи багато тестів та датчиків, як описується з посиланням на ФІГ. 4. Неточний IMU-курс з корекцією похибки є співфазним з апроксимованим фактичним курсом 700 транспортного засобу, якщо неточний IMU-курс з корекцією похибки перебуває у межах від ≥ -90° до ≤+90° апроксимованого фактичного курсу 700. Якщо неточний IMU-курс з корекцією похибки перебуває поза межами діапазону від ≥ -90° до ≤+90° апроксимованого фактичного курсу 700, він перебуває в іншій фазі. Наступний етап 500 полягає у розрахунку точного напрямку курсу. Розрахунок точного напрямку курсу залежить від того, чи був неточний IMU-курс з корекцією похибки визначений як співфазний з апроксимованим фактичним курсом 700 транспортного засобу 10. Якщо неточний IMU-курс з корекцією похибки був визначений як співфазний з апроксимованим фактичним курсом 700, неточний IMU-курс з корекцією похибки є точним напрямком курсу. Він представляється через додавання 0° до неточного IMU-курсу з корекцією похибки на етапі 510. Якщо було визначено, що неточний IMU-курс з корекцією похибки перебуває у різних фазах з апроксимованим фактичним курсом 700, точний напрямок курсу є неточним IMUкурсом з корекцією похибки, зсунутим на 180°. Він представляється через додавання 180° до неточного IMU-курсу з корекцією похибки на етапі 520. І нарешті, точний напрямок курсу порівнюють з визначеним GNSS напрямком руху транспортного засобу на етапі 600, таким чином, щоб визначати переміщення транспортного засобу переднім чи заднім ходом. Фазу точного напрямку курсу та визначеного GNSS напрямку руху порівнюють на етапі 610. Якщо точний напрямок курсу є співфазним з визначеним GNSS напрямком руху транспортного засобу, транспортний засіб переміщується вперед 620, інакше він рухається заднім ходом 630. Спосіб визначення прямої / зворотної позиції згідно з даним винаходом дозволяє уникати великих стрибків похибки вивірення курсу, без необхідності покладання на визначення прямої / зворотної позиції транспортного засобу для корекції вхідного показника визначеного GNSS напрямку руху перед розрахунком похибки вивірення курсу. Цього досягають шляхом фіксації вектора похибок на етапі 210, на відміну від коректування визначеного GNSS напрямку руху для прямого та зворотного. Запропонований спосіб визначення прямої / зворотної позиції потенційно є швидшим, точнішим і надійнішим за відомі способи. 6 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 ФІГ. 4 показує блок-схему 50 розрахунку апроксимованого фактичного курсу 700 шляхом апроксимації фактичного курсу 22 транспортного засобу 10. Апроксимований фактичний курс 700 може розраховуватися багатьма способами з застосуванням певної кількості датчиків та тестів. Коли транспортний засіб 10 рухається зі швидкістю, що перевищує певний показник, визначений GNSS напрямок руху 710 може використовуватись як апроксимований фактичний курс 700 лише у разі, якщо пряма / зворотна позиція може бути напевно відомою протягом 100% часу. Оскільки це не може бути гарантовано лише на основі GNSS-вимірювань, визначений GNSS напрямок руху 710 завжди вважається неточним показником. Визначення прямої / зворотної позиції транспортного засобу 10 для апроксимації фактичного курсу 700 включає зважування багатьох тестів 714 - 722. Кожен з тестів дає результат "1" для прямого, "0" для невідомого напрямку і "-1" для зворотного. Зібрані дані не завжди складаються з повного набору показів датчика, а отже, допустимими є пропуски вимірювань датчика, спричинені перебоями у роботі датчиків, неготовністю датчиків або просто відсутністю встановлених датчиків у системі. Тест 714 на лінійне прискорення порівнює зміни швидкості зі змінами в об’єднаних показниках акселерометра для визначення переміщення транспортного засобу 10 вперед або назад. Для UI-тесту 716 використовуються дані, введені водієм транспортного засобу 10, для визначення прямого або зворотного переміщення. Інтерфейс користувача (UI) вказує водієві, чи переміщується транспортний засіб вперед, чи назад. У тесті передачі 718 як вхідний показник використовується позиція FNR-важеля транспортного засобу 10. FNR-важіль може перебувати у позиціях "Forward", "Neutral" або "Reverse". Якщо FNR-важіль перебуває у позиції "Forward", тест передачі 718 дає результат "1" для переднього ходу. Якщо FNR-важіль перебуває у позиції "Reverse", тест передачі 718 дає результат "-1" для заднього ходу. Якщо FNR-важіль перебуває у позиції "Neutral", тест передачі 718 дає результат "0" для невідомого напрямку. Для тесту кута повороту коліс 720 беруть швидкість транспортного засобу 10, виміряну за допомогою коробка передач, радара для визначення швидкості ходу або іншого датчика, та кут повороту від підсистеми керування і розраховує орієнтовну кутову швидкість рискання, якщо за напрямок руху транспортного засобу береться прямий напрямок. Цю орієнтовну кутову швидкість рискання порівнюють з кутовою швидкістю рискання, виміряною швидкісними гіроскопами транспортного засобу, і якщо два значення перебувають у суттєво відмінних напрямках, то визначається, що транспортний засіб переміщується заднім ходом. Центрифугувальний тест 722 порівнює знак (+ або -) кутової швидкості рискання IMU 16 зі знаком (+ або -) бокового прискорення, виміряного акселерометром IMU 16. Якщо знаки кутової швидкості рискання та бокового прискорення збігаються, транспортний засіб 10 переміщується вперед. Якщо знаки кутової швидкості рискання та бокового прискорення різні, транспортний засіб 10 рухається заднім ходом. ФІГ. 8 показує зміни знака залежно від переміщення переднім чи заднім ходом. Кутова швидкість рискання та бокове прискорення мають бути більшими за задане порогове значення, коли транспортний засіб повертає, для того, щоб цей тест був значущим. Різні тести 714-722 розглядаються для визначення прямої / зворотної позиції транспортного засобу 10, і визначений GNSS напрямок руху відповідно коректується на 180°, якщо транспортний засіб рухається заднім ходом. Слід зазначити, що цей етап виконують значно пізніше за розрахунок будь-якої похибки вивірення курсу в IMU, і цей скоректований визначений GNSS напрямок руху спеціально не повідомляється для коректування похибки нерозв’язаного IMU-курсу. За певних обставин азимутальний кут 724, отриманий від цифрового компаса у транспортному засобі, може використовуватися для апроксимації фактичного курсу 22. Це особливо стосується переміщення транспортного засобу з низькою швидкістю. Транспортний засіб може включати подвійну систему GPS, яка має два GPS-приймачі, кожен з яких має антену. Модуль обробки 18 може визначати напрямок 726 подвійної GPS для транспортного засобу 10 на основі вхідних даних від двох приймачів, як відомо спеціалістам у даній галузі. Азимутальний кут 724, напрямок 726 подвійної GPS та визначений GNSS напрямок руху (скоректований для прямої / зворотної позиції) вибірково використовуються модулем обробки 18 для визначення апроксимованого фактичного курсу 700. Модуль обробки 18 може поєднувати азимутальний кут 724, напрямок 726 подвійної GPS та визначений GNSS напрямок 7 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 руху з застосуванням алгоритмів різних типів для одержання апроксимованого фактичного курсу 700. Представлені нижче приклади з 1 по 3 описують різні сценарії, в яких застосовується спосіб згідно з даним винаходом. Приклад 1 (ФІГ. 5A, 5B) Приклад 1 є випадком визначення прямої / зворотної позиції, при якому грубе вивірення IMU (у час t = 0) перебувало поза межами +/- 90° фактичного курсу 22 транспортного засобу 10, і транспортний засіб 10 переміщується вперед у більш пізній час (час = t+1). Орієнтацію та напрямок руху транспортного засобу 10 при грубому вивіренні показано на ФІГ. 5A, а орієнтацію та напрямок руху транспортного засобу у більш пізній час показано на ФІГ. 5B. На початку руху (ФІГ. 5A) показано транспортний засіб, який переміщується у південному напрямку (180°) заднім ходом. Фактичний курс 22 = 0° (північ) та грубе вивірення IMU = 180° (південь). У цьому прикладі грубе вивірення беруть як перший сигнал визначеного GNSS напрямку руху, і першою дією після початку руху транспортного засобу 10 є виїзд транспортного засобу заднім ходом 10 з гаража. У більш пізній час (ФІГ. 5B, час t + 1) фактичний курс 22 транспортного засобу становить 90° (схід), і транспортний засіб 10 переміщується вперед. Нерозв’язаний IMU-курс = (грубе вивірення IMU [t=0]) + (виміряна гіроскопом IMU кутова швидкість рискання [t+1]). Так, для прикладу, в якому у більш пізній час ніс повертає на + 90°, як вимірюється гіроскопом IMU, нерозв’язаний IMU-курс (t+1) = 180° + 90° = 270°. Фактичний курс 22 носа у більш пізній час фактично становить 90°. У прикладі з ФІГ. 5 припускається, що визначений GNSS напрямок руху у більш пізній час (t+1) = 90°. Як показано на ФІГУРАХ 3 та 5B, розрахунок 110 похибки вивірення курсу у більш пізній час (t+1) = нерозв’язаний IMU-курс – визначений GNSS напрямок руху. Похибка вивірення курсу = 270° - 90° = 180°. Похибка вивірення курсу перебуває поза межами заданого діапазону від ≥-90° до ≤+90°. Таким чином, на етапі 210 похибка вивірення курсу фіксується, таким чином, що похибка вивірення курсу = 180° - 180° = 0°. Неточний IMU-курс з корекцією похибки згідно з етапом 310 = нерозв’язаний IMU-курс A*похибка вивірення курсу. Неточний IMU-курс з корекцією похибки (t+1) = 270° - 0° = 270°. З застосуванням евристичного алгоритму, описаного з посиланням на ФІГ. 4, визначають апроксимований фактичний курс 700, який становить, наприклад, 93°. Різниця між неточним IMU-курсом з корекцією похибки (270°) та апроксимованим фактичним курсом 700 (93°) становить 177°, що означає іншу фазу, як було порівняно на етапі 410. Якщо неточний IMU-курс з корекцією похибки перебуває в іншій фазі відносно апроксимованого фактичного курсу 700, точний напрямок курсу є неточним IMU-курсом з корекцією похибки, зміщеним на 180°. Точний напрямок курсу = 270°+180° = 90°. Порівняння між точним напрямком курсу (90°) та визначеним GNSS напрямком руху (90°) на етапі 610 визначає, що ці два показники збігаються за фазою, в результаті чого система 12 правильно визначає пряму / зворотну позиція як пряме переміщення у більш пізній час (t+1). Приклад 2 (ФІГ. 6A, 6B) Приклад 2 є таким самим, як приклад 1, за винятком того, що первісне грубе вивірення IMU перебуває в межах +/- 90° фактичного курсу 22 транспортного засобу 10. Орієнтацію та напрямок руху транспортного засобу 10 при грубому вивіренні показано на ФІГ. 6A, а орієнтацію та напрямок руху транспортного засобу у більш пізній час показано на ФІГ. 6B. На початку руху (ФІГ. 6A) показано транспортний засіб 10, який переміщується вперед у північному напрямку (0°). Фактичний курс 22 = 0° (північ), і грубе вивірення IMU = 2°. У цьому прикладі грубе вивірення взято як перший сигнал визначеного GNSS напрямку руху, і перший рух транспортного засобу після запуску є переднім рухом. У більш пізній час (ФІГ. 6B, час = t+1) фактичний курс 22 транспортного засобу становить 90°, і транспортний засіб 10 переміщується вперед. Нерозв’язаний IMU-курс = (грубе вивірення IMU [t=0]) + (виміряна гіроскопом IMU кутова швидкість рискання [t+1]). Так, для прикладу, в якому у більш пізній час ніс повертається на + 90°, як вимірюється гіроскопом IMU, нерозв’язаний IMU-курс (t+1) = 2° + 90° = 92°. Фактичний курс 22 носа у більш пізній час становить 90°. За припущення, що GNSS-блок 14 є точним, визначений GNSS напрямок руху у більш пізній час також становить 90°. 8 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 60 Як показано на ФІГУРАХ 3 та 6B, похибка розрахунку 110 вивірення курсу у більш пізній час (t+1) = нерозв’язаний IMU-курс – визначений GNSS напрямок руху. Похибка вивірення курсу = 92° - 90° = 2°. Похибка вивірення курсу є меншою за 90°. На етапі 210 похибка вивірення курсу не потребує фіксації, тому залишається похибка вивірення курсу = 2°. Неточний IMU-курс з корекцією похибки згідно з етапом 310 = нерозв’язаний IMU-курс - A* похибка вивірення курсу. Неточний IMU-курс з корекцією похибки [t+1] = 92° - 0,1*2° = 91,8°. Припускається, що апроксимований фактичний курс 700 становить 93°, як розраховано з посиланням на ФІГ. 4. Різниця між неточним IMU-курсом з корекцією похибки (91,8°) та апроксимованим фактичним курсом 700 (93°) становить 2,2°, тому ці два показники збігаються за фазою, як порівнювалося на етапі 410. Якщо неточний IMU-курс з корекцією похибки є співфазним з апроксимованим фактичним курсом 700, точний напрямок курсу є неточним IMU-курсом з корекцією похибки, зміщеним на 0°. Точний напрямок курсу = 91,8° + 0° = 91,8°. Порівняння фаз між точним напрямком курсу (91,8°) та визначеним GNSS напрямком руху (90°) на етапі 610 визначає, що ці два показники збігаються за фазою, в результаті чого система 12 правильно визначає пряму / зворотну позицію як пряме переміщення. Приклад 3 (ФІГ. 7A, 7B) Приклад 3 є таким самим, як приклад 1, за винятком того, що транспортний засіб 10 рухається заднім ходом у більш пізній час (ФІГ. 7B, t+1). на ФІГ. 7A показано орієнтацію транспортного засобу 10 під час грубого вивірення, яке є таким самим грубим вивіренням, як показано й обговорюється з посиланням на ФІГ. 5A. У реальних умовах цей приклад відповідає ситуації, коли транспортний засіб починає рух на передачі заднього ходу й залишається в такому режимі протягом усього дня. У більш пізній час (ФІГ. 7B) фактичний курс 22 транспортного засобу становить 90° (схід), і транспортний засіб 10 рухається заднім ходом. Нерозв’язаний IMU-курс = (грубе вивірення IMU [t=0]) + (виміряна гіроскопом IMU кутова швидкість рискання [t+1]). Для цього прикладу, в якому у більш пізній час ніс є повернутим на + 90°, як вимірюється гіроскопом IMU, нерозв’язаний IMU-курс у більш пізній час = 180° + 90° = 270°. За припущення, що GNSS-блок 14 є точним, визначений GNSS напрямок руху у більш пізній час = 270° Як показано на ФІГУРАХ 3 та 7B, розрахунок похибки вивірення курсу 110 у більш пізній час t+1 = нерозв’язаний IMU-курс – визначений GNSS напрямок руху. Похибка вивірення курсу = 270° - 270° = 0°. Похибка вивірення курсу є меншою за +90°, але більшою за -90°, тобто, у межах заданого діапазону. На етапі 210 похибка вивірення курсу не потребує фіксації, тому похибка вивірення курсу залишається на рівні 0°. Неточний IMU-курс з корекцією похибки згідно з етапом 310 = IMU-курс - A* похибка вивірення курсу. Неточний IMU-курс з корекцією похибки = 270° - 0 = 270°. Припускається, що апроксимований фактичний курс 700 у більш пізній час t+1 становить 93°, як розраховано з посиланням на ФІГ. 4. Різниця між неточним IMU-курсом з корекцією похибки (270°) та апроксимованим фактичним курсом (93°) становить 177°, тому ці два показники перебувають у різних фазах, як порівнювалося на етапі 410. Якщо неточний IMU-курс з корекцією похибки перебуває в іншій фазі відносно апроксимованого фактичного курсу 700, точний напрямок курсу є неточним IMU-курс з корекцією похибки, зміщеним на 180°. Точний напрямок курсу у більш пізній час t+1 = 270° + 180° = 90°. Порівняння між точним напрямком курсу (90°) та визначеним GNSS напрямком руху (270°) на етапі 610 виявляє, що ці два показники перебувають у різних фазах, в результаті чого система 12 визначає пряму / зворотну позицію у більш пізній час t+1 як задній хід. Одна з переваг системи 12 полягає в тому, що похибка вивірення курсу, яка використовується для розрахунку неточного IMU-курсу з корекцією похибки, завжди обмежується діапазоном від ≥-90° до ≤+90° без необхідності у визначенні прямої / зворотної позиції транспортного засобу у певний момент. Таким чином, вектор похибок залишається малим, і неточний IMU-курс з корекцією похибки розв’язується лише для переднього / заднього ходу на більш пізньому етапі. Замість виявлення переднього / заднього ходу у певний момент для корекції похибки вивірення курсу, даний винахід передбачає визначення апроксимованого фактичного курсу для порівняння фаз, як описано. Перевага полягає в тому, що система є нечутливою до швидких змін у визначеному GNSS напрямку руху, як зазвичай трапляється, коли, наприклад, транспортний засіб різко гальмує під час руху, що викликає значне галопування / підстрибування вперед та назад, якого зазнають шини та 9 UA 104547 C2 5 10 система підвіски транспортного засобу. Такі різкі зміни у визначеному GNSS напрямку руху часто трапляються у точному землеробстві. Раніше це б виявлялося через великі значення у векторі похибок, що, у свою чергу, віддаляло б значення IMU-курсу від фактичного курсу. Система також має високий допуск стосовно розсіяних вимірювань датчиків, що дозволяє пристосувати систему до перебоїв у роботі датчиків або їх відсутності. Представлений вище опис різних варіантів втілення даного винаходу призначається для ознайомлення спеціалістів у даній галузі. Він не є вичерпним або таким, що обмежує обсяг винаходу єдиним описаним прикладом втілення. Як було зазначено вище, численні альтернативні варіанти даного винаходу стануть очевидними для спеціалістів у зазначеній галузі. Відповідно, хоча спеціально обговорювалися деякі альтернативні варіанти втілення, інші варіанти стануть очевидними або відносно легко зможуть бути розроблені спеціалістами у даній галузі. Відповідно, цей винахід охоплює всі альтернативні варіанти, модифікації та видозміни даного винаходу, які було описано авторами, та інші варіанти втілення, які охоплюються обсягом та сутністю вищеописаного винаходу. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Спосіб визначення точного напрямку курсу транспортного засобу, причому спосіб включає: визначення похибки вивірення курсу, яка є різницею між визначеним глобальною навігаційною супутниковою системою (GNSS) напрямком руху транспортного засобу та нерозв'язаним визначеним Інерціальним вимірювальним блоком (IMU) курсом транспортного засобу; корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону; корекцію нерозв'язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу; визначення, чи є нерозв'язаний IMU-курс, після корекції похибки вивірення курсу, по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; та розрахунок точного напрямку курсу шляхом зміщення нерозв'язаного IMU-курсу, після корекції похибки вивірення курсу, на 180 градусів, якщо нерозв'язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу. 2. Спосіб за п. 1, який відрізняється тим, що включає визначення, чи рухається транспортний засіб у прямому чи зворотному напрямку, шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. 3. Спосіб за п. 1 або п. 2, який відрізняється тим, що корекцію нерозв'язаного IMU-курсу транспортного засобу з використанням похибки вивірення курсу включає розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу. 4. Спосіб за п. 3, який відрізняється тим, що точний напрямок курсу розраховують як: неточний IMU-курс з корекцією похибки або неточний IMU-курс з корекцією похибки, зміщений на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу. 5. Спосіб за п. 4, який відрізняється тим, що визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу, в оптимальному варіанті включає апроксимацію фактичного напрямку носа транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу. 6. Спосіб за п. 5, який відрізняється тим, що включає порівняння апроксимованого фактичного напрямку носа транспортного засобу з неточним IMU-курсом з корекцією похибки. 7. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху. 8. Спосіб визначення переміщення транспортного засобу переднім чи заднім ходом, причому спосіб включає: отримання визначеного Глобальною навігаційною супутниковою системою (GNSS) напрямку руху для транспортного засобу від GNSS-блока транспортного засобу; отримання визначеного Інерціальним вимірювальним блоком (IMU) нерозв'язаного курсу транспортного засобу від IMU транспортного засобу; визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв'язаним IMU-курсом; 10 UA 104547 C2 5 10 15 20 25 30 35 40 45 50 55 60 корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка вивірення курсу перебуває поза межами заданого діапазону; розрахунок неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу; визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; розрахунок точного напрямку курсу, який є: неточним IMU-курсом з корекцією похибки або неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки був по суті протилежним фактичному напрямкові носа транспортного засобу; та порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу, таким чином, щоб визначати переміщення транспортного засобу переднім чи заднім ходом. 9. Спосіб за п. 8, який відрізняється тим, що включає визначення руху транспортного засобу заднім ходом, якщо точний напрямок курсу є по суті протилежним напрямком відносно визначеного GNSS напрямку руху. 10. Спосіб за п. 8 або п. 9, який відрізняється тим, що визначення, чи є неточний IMU-курс з корекцією похибки по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу, включає апроксимацію фактичного напрямку носа транспортного засобу з застосуванням одного або кількох тестів абсолютного курсу або тестів відносного руху транспортного засобу. 11. Спосіб за п. 10, який відрізняється тим, що включає порівняння апроксимованого фактичного напрямку носа транспортного засобу з неточним IMU-курсом з корекцією похибки. 12. Спосіб фіксації похибки вивірення курсу, причому спосіб включає: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху транспортного засобу та нерозв'язаним IMU-курсом транспортного засобу; корекцію похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка вивірення курсу перебуває поза межами заданого діапазону. 13. Спосіб за п. 12, який відрізняється тим, що включає випробування, чи перебуває похибка вивірення курсу у межах заданого діапазону від ≥-90 градусів до ≤+90 градусів. 14. Система для застосування у визначенні точного напрямку курсу транспортного засобу, причому система включає: GNSS-блок, закріплений на транспортному засобі, причому GNSS-блок призначається для розрахунку напрямку руху транспортного засобу; IMU-блок, закріплений на транспортному засобі, причому IMU-блок призначається для розрахунку нерозв'язаного IMU-курсу транспортного засобу; модуль обробки, який включає процесор, запрограмований для: визначення похибки вивірення курсу, яка є різницею між визначеним GNSS напрямком руху та нерозв'язаним IMU-курсом; корекції похибки вивірення курсу на 180 градусів, таким чином, щоб вона перебувала у межах заданого діапазону, якщо похибка перебуває поза межами заданого діапазону; корекції нерозв'язаного IMU-курсу з використанням похибки вивірення курсу, визначення, чи є нерозв'язаний IMU-курс по суті відповідним фактичному напрямкові носа транспортного засобу, чи по суті протилежним фактичному напрямкові носа транспортного засобу; розрахунку точного курсу шляхом зміщення нерозв'язаного IMU-курсу на 180 градусів, якщо нерозв'язаний IMU-курс є по суті протилежним фактичному напрямкові носа транспортного засобу. 15. Система за п. 14, яка відрізняється тим, що процесор є запрограмованим на корекцію нерозв'язаного IMU-курсу шляхом розрахунку неточного IMU-курсу з корекцією похибки з використанням похибки вивірення курсу. 16. Система за п. 15, яка відрізняється тим, що процесор є запрограмованим на розрахунок точного напрямку курсу, який є: неточним IMU-курсом з корекцією похибки або неточним IMU-курсом з корекцією похибки, зміщеним на 180 градусів, якщо було визначено, що неточний IMU-курс з корекцією похибки є по суті протилежним фактичному напрямкові носа транспортного засобу. 17. Система за п. 16, яка відрізняється тим, що процесор є запрограмованим на визначення переміщення транспортного засобу переднім чи заднім ходом шляхом порівняння точного напрямку курсу з визначеним GNSS напрямком руху транспортного засобу. 11 UA 104547 C2 5 12 UA 104547 C2 13 UA 104547 C2 14 UA 104547 C2 15 UA 104547 C2 16 UA 104547 C2 17 UA 104547 C2 18 UA 104547 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 19
ДивитисяДодаткова інформація
Назва патенту англійськоюA system and method of determining an unambiguous heading direction of a vehicle
Автори англійськоюKellar, William
Автори російськоюКеллар Уильям
МПК / Мітки
МПК: G01S 19/00, G01C 21/00
Мітки: визначення, система, курсу, засобу, точного, транспортного, напрямку, спосіб
Код посилання
<a href="https://ua.patents.su/21-104547-sistema-ta-sposib-viznachennya-tochnogo-napryamku-kursu-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб визначення точного напрямку курсу транспортного засобу</a>
Спосіб точного визначення місця розташування об’єкта, переважно транспортного засобу, що рухається відомим маршрутом
Номер патенту: 72621
Опубліковано: 15.03.2005
Автор: Франкар Жан-Пьєр
МПК: B61L 25/00, G01S 5/02
Мітки: маршрутом, визначення, об'єкта, відомим, засобу, розташування, точного, рухається, транспортного, переважно, спосіб, місця
Формула / Реферат:
1. Спосіб визначення місця розташування і/або позиціювання об'єкта, зокрема транспортного засобу, такого як поїзд, що рухається за відомим маршрутом, особливо стосовно залізничного транспорту, який відрізняється тим, що згадане визначення місця розташування і/або згадане позиціювання згаданого об'єкта здійснюють за допомогою точних розрахунків, виконаних у конкретний момент часу, заснованих, з одного боку, на первинних вимірах, з...
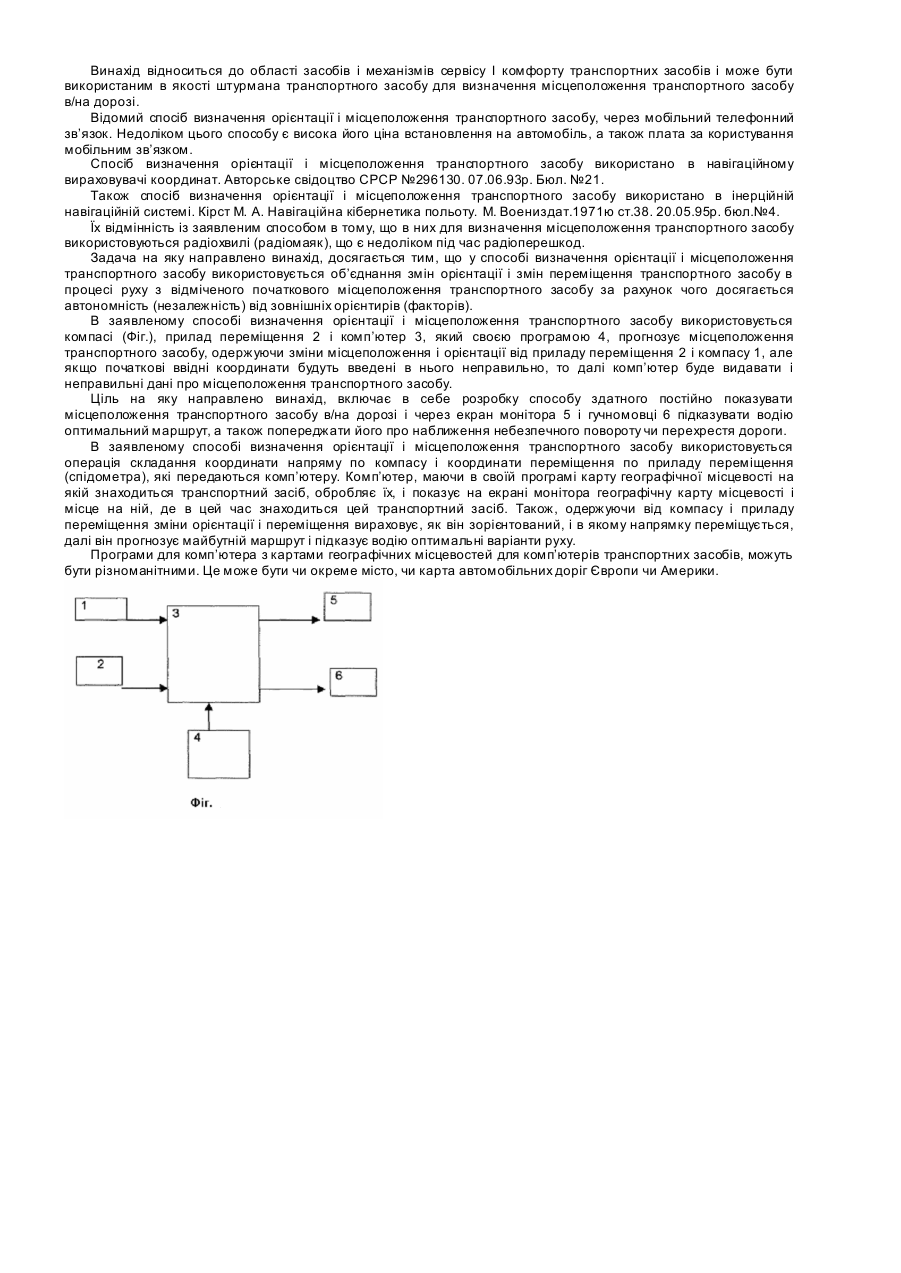
Спосіб визначення орієнтації і місцеположення транспортного засобу
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 21/00, G01C 23/00
Мітки: визначення, орієнтації, місцеположення, засобу, транспортного, спосіб
Формула / Реферат:
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення величини нахилу колісного транспортного засобу в повздовжній площині
Номер патенту: 58116
Опубліковано: 25.03.2011
Автори: Луньков Артур Володимирович, Козлинський Мирослав Петрович, Вяткін Юрій Олександрович, Сокіл Богдан Іванович, Чорний Микола Васильович
МПК: B60C 23/00, F41H 7/00
Мітки: нахилу, транспортного, площині, величини, спосіб, засобу, повздовжній, колісного, визначення
Формула / Реферат:
Спосіб визначення величини нахилу колісного транспортного засобу в повздовжній площині, що включає вимірювання кута нахилу транспортного засобу, який відрізняється тим, що вимірюють тиск повітря в шинах, за яким визначають координати центра мас транспортного засобу, вимірюють тиск повітря в шинах переднього або заднього мостів нахиленого транспортного засобу, порівнюють його з розрахунковим, встановлюють величини вертикальних навантажень на...
Спосіб визначення величини нахилу колісного транспортного засобу в поперечній площині
Номер патенту: 58115
Опубліковано: 25.03.2011
Автори: Грубель Михайло Григорович, Козлинський Мирослав Петрович, Скрипник Сергій Вікторович, Слюсаренко Андрій Віталійович, Зіркевич Валентин Миколайович, Калінін Олександр Марковійович
МПК: F41H 7/00, B60C 23/00
Мітки: визначення, площині, нахилу, величини, поперечний, транспортного, колісного, засобу, спосіб
Формула / Реферат:
Спосіб визначення величини нахилу колісного транспортного засобу в поперечній площині, що включає вимірювання кута нахилу транспортного засобу, який відрізняється тим, що вимірюють тиск повітря в шинах, за яким визначають координати центра мас транспортного засобу, вимірюють тиск повітря в шинах правої або лівої сторін нахиленого транспортного засобу, порівнюють його з розрахунковим, встановлюють величини вертикальних навантажень на кожне із...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: площині, здійснення, транспортного, спосіб, центра, ваги, пристрій, вертикальний, засобу, колісного, визначення, положення
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Попередній патент: Пристрій автоматичного моніторингу стану контактних з’єднань високовольтних підстанцій і ліній електропередач
Наступний патент: Спосіб і система розповсюдження тизерів користувачам мереж мобільного зв’язку
Випадковий патент: Барабанна сушарка