Інформація про перешкоди з множини секторів для керування потужністю

Формула / Реферат
1. Спосіб здійснення керування потужністю бездротового термінала обслуговуючим сектором, який полягає в тому, що одержують щонайменше для двох секторів індикацію перешкод, які спостерігаються даним сектором, причому кожний сектор є або сусіднім сектором, не призначеним для прийому передачі даних, відправленої бездротовим терміналом, або обслуговуючим сектором, призначеним для прийому передачі даних, відправленої бездротовим терміналом, поєднують кожну індикацію перешкод, одержану зі згаданих щонайменше двох секторів, індикація містить перший біт, який показує, чи перебувають перешкоди, які спостерігаються даним сектором, вище або нижче першого порога перешкод; і
коректують потужність передачі для передачі даних на підставі об'єднаних індикацій.
2. Спосіб за п. 1, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод.
3. Спосіб за п. 1, в якому при об'єднанні присвоюють ваговий коефіцієнт кожній індикації.
4. Спосіб за п. 3, в якому при присвоєнні вагового коефіцієнта ваговий коефіцієнт присвоюють на підставі відношення підсилень каналу для кожного сектора відносно обслуговуючого сектора.
5. Спосіб за п. 4, в якому обслуговуючим сектором є обслуговуючий сектор зворотної лінії зв'язку.
6. Спосіб за п. 4, в якому додатково визначають порогове значення для кожної індикації і при присвоєнні вагового коефіцієнта присвоюють ваговий коефіцієнт кожному пороговому значенню згідно з відношенням підсилень каналу.
7. Спосіб за п. 4, в якому посилення каналів для кожного з щонайменше двох секторів і обслуговуючих секторів оцінюють на підставі пілот-сигналів, одержаних, відповідно, з цих секторів.
8. Спосіб за п. 4, в якому при коректуванні потужності передачі здійснюють коректування на підставі об'єднаної індикації і імовірності.
9. Спосіб за п. 8, в якому додатково визначають імовірність підвищувального або понижувального коректування потужності передачі на підставі відношення підсилень каналу для кожного зі згаданих щонайменше двох секторів.
10. Спосіб за п. 9, в якому імовірність визначають також на підставі поточного рівня потужності передачі для передачі даних.
11. Спосіб за п. 9, в якому потужність передачі коректують кроками, що мають фіксований розмір, відповідно до певної імовірності.
12. Спосіб за п. 4, в якому додатково визначають розмір кроку коректування потужності передачі на підставі обчислених відношень підсилень каналу, причому коректування здійснюють на підставі об'єднаних індикацій і розміру кроку.
13. Спосіб за п. 12, в якому розмір кроку визначають також на підставі поточного рівня потужності передачі для згаданої передачі даних.
14. Пристрій для здійснення керування потужністю бездротового термінала, який містить
процесор, виконаний з можливістю одержання для щонайменше двох секторів індикації перешкод, які спостерігаються даним сектором, причому індикація містить перший біт, який показує, чи перебувають перешкоди, які спостерігаються даним сектором, вище або нижче першого порога перешкод, причому кожний сектор є або сусіднім сектором, не призначеним для прийому передачі даних, відправленої згаданим бездротовим терміналом, або обслуговуючим сектором, призначеним для прийому передачі даних, відправленої згаданим бездротовим терміналом, і коректування потужності передачі для передачі даних на підставі об'єднання кожної індикації перешкод, прийнятої зі згаданих щонайменше двох секторів, і
запам'ятовуючий пристрій, зв'язаний із процесором.
15. Пристрій за п. 14, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод.
16. Пристрій за п. 14, в якому процесор виконаний з можливістю об'єднання за допомогою присвоєння вагового коефіцієнта кожній індикації.
17. Пристрій за п. 16, в якому процесор виконаний з можливістю присвоєння вагового коефіцієнта на підставі відношення підсилень каналу для кожного сектора відносно обслуговуючого сектора.
18. Пристрій за п. 17, в якому обслуговуючим сектором є обслуговуючий сектор зворотної лінії зв'язку.
19. Пристрій за п. 17, в якому процесор виконаний з можливістю визначення порогового значення для кожної індикації і присвоєння вагового коефіцієнта кожному пороговому значенню згідно з відношенням підсилень каналу.
20. Пристрій за п. 17, в якому процесор виконаний з можливістю коректування потужності передачі на підставі об'єднаної індикації і імовірності.
21. Пристрій за п. 20, в якому процесор виконаний з можливістю визначення імовірності підвищувального або понижувального коректування потужності передачі на підставі відношень підсилень каналів для кожного зі згаданих щонайменше двох секторів.
22. Пристрій за п. 21, в якому процесор виконаний з можливістю визначення імовірності на підставі поточного рівня потужності передачі для передачі даних.
23. Пристрій за п. 21, в якому процесор виконаний з можливістю коректування потужності передачі кроками, які мають фіксований розмір, відповідно до згаданої певної імовірності.
24. Пристрій за п. 21, в якому процесор виконаний з можливістю визначення розміру кроку і коректування на підставі об'єднаних індикацій і розміру кроку.
25. Пристрій за п. 24, в якому процесор виконаний з можливістю визначення розміру кроку на підставі поточного рівня потужності передачі для передачі даних.
26. Пристрій для здійснення керування потужністю бездротового термінала в системі бездротового зв'язку, який містить:
засіб для одержання для щонайменше двох секторів індикації перешкод, які спостерігаються даним сектором, причому індикація містить перший біт, який показує, чи перебувають перешкоди, які спостерігаються даним сектором, вище або нижче першого порога перешкод, причому кожний сектор є або сусіднім сектором, не призначеним для прийому передачі даних, відправленої даним бездротовим терміналом, або обслуговуючим сектором, призначеним для прийому передачі даних, відправленої даним бездротовим терміналом,
засіб для об'єднання кожної індикації перешкод, прийнятої зі згаданих щонайменше двох секторів, і
засіб для коректування потужності передачі для передачі даних на підставі об'єднаних індикацій.
27. Пристрій за п. 26, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод.
28. Пристрій за п. 26, в якому засіб для об'єднання містить засіб для присвоєння вагового коефіцієнта кожній індикації.
29. Пристрій за п. 28, в якому засіб для присвоєння вагового коефіцієнта містить засіб для присвоєння вагового коефіцієнта на підставі відношення підсилень каналів для кожного сектора відносно обслуговуючого сектора.
30. Пристрій за п. 29, який додатково містить засіб для визначення порогового значення для кожної індикації, а засіб для присвоєння вагового коефіцієнта містить засіб для присвоєння вагового коефіцієнта кожному пороговому значенню згідно з відношенням підсилень каналів.
31. Пристрій за п. 29, який додатково містить засіб для обчислення підсилень каналу на підставі одержаних пілот-сигналів.
32. Пристрій за п. 29, в якому засіб для коректування потужності передачі містить засіб для коректування на підставі об'єднаної індикації і імовірності.
33. Пристрій за п. 29, в якому засіб для коректування потужності передачі містить засіб для визначення розміру кроку коректування потужності передачі на підставі обчислених відношень підсилень каналів і коректування на підставі об'єднаних індикацій і розміру кроку.
Текст
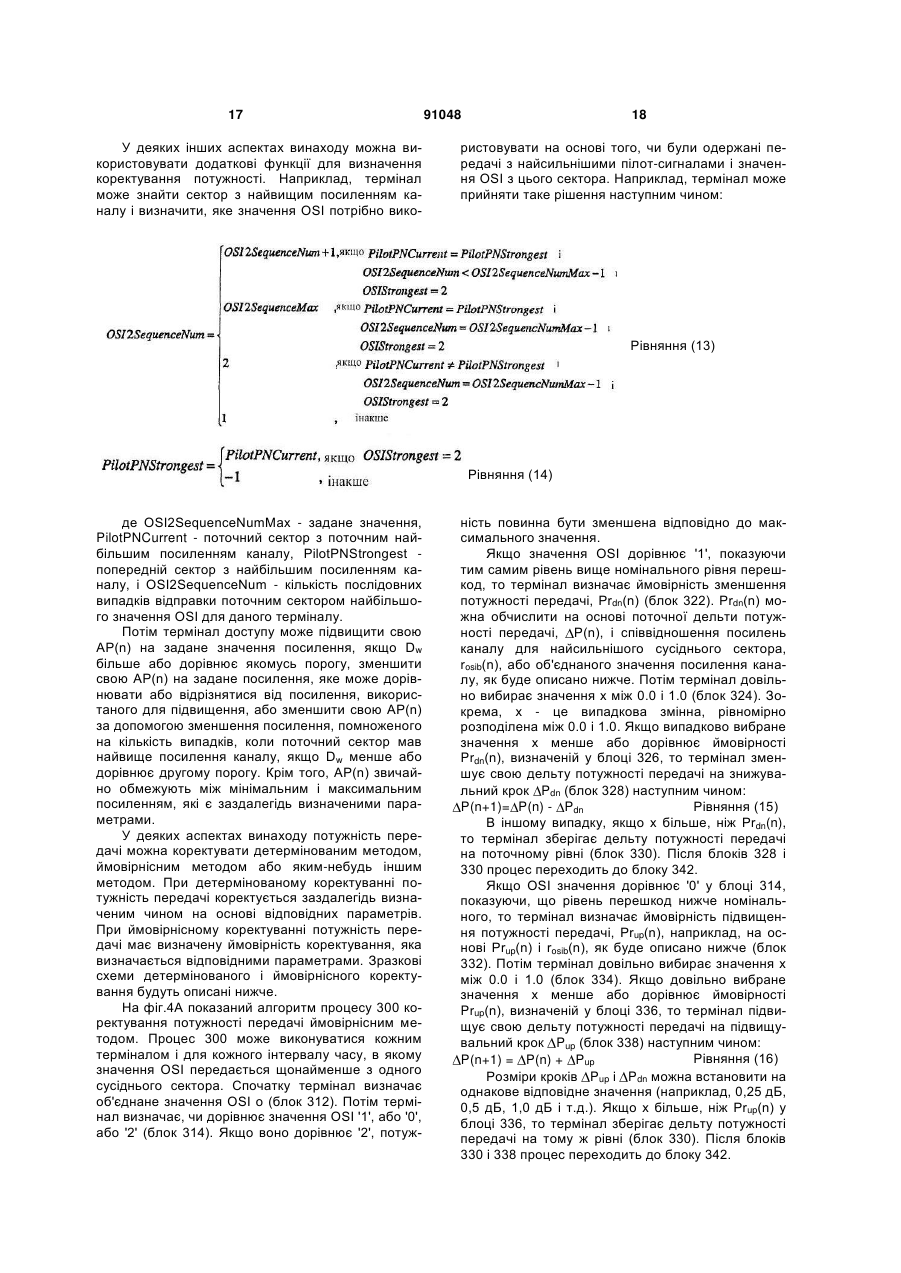
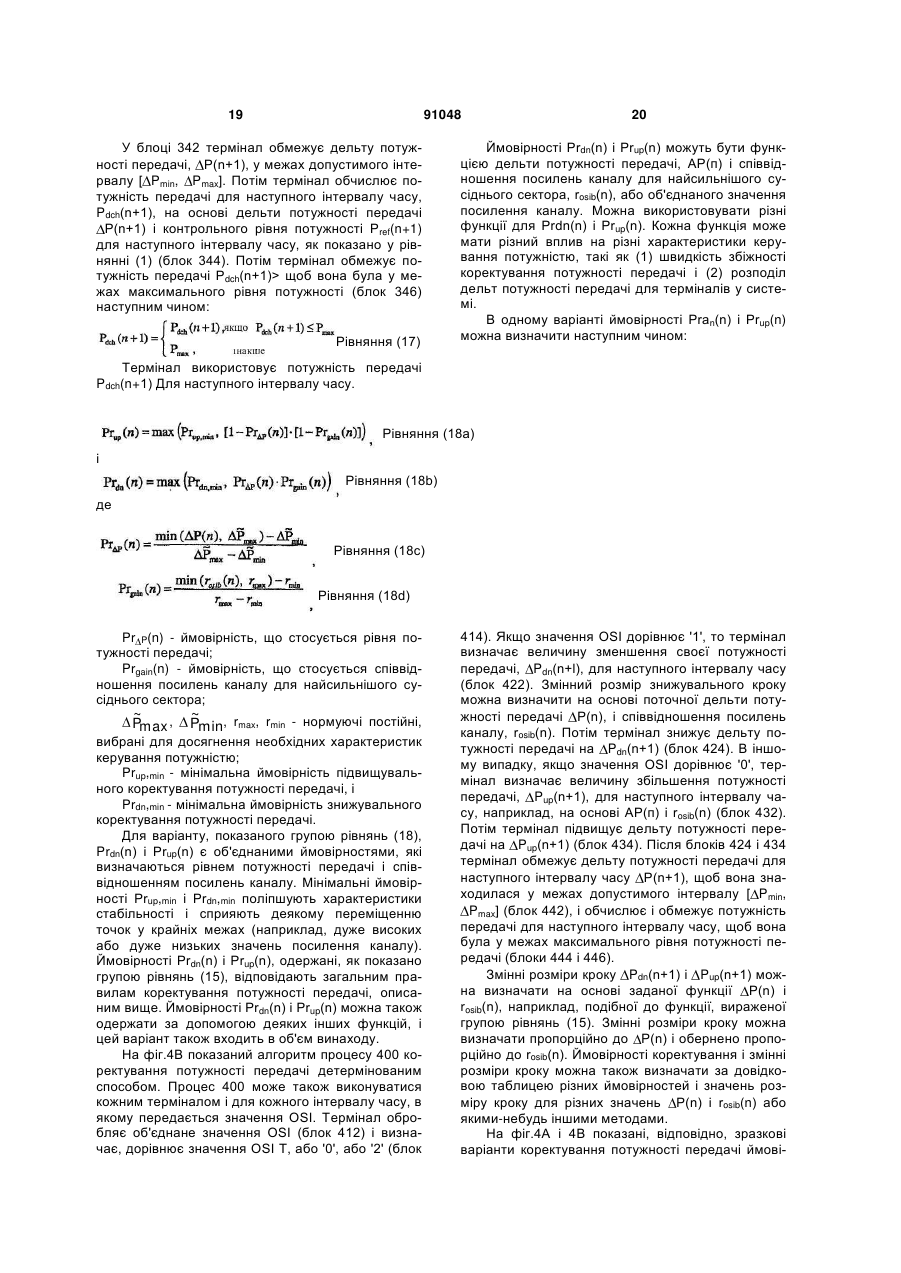
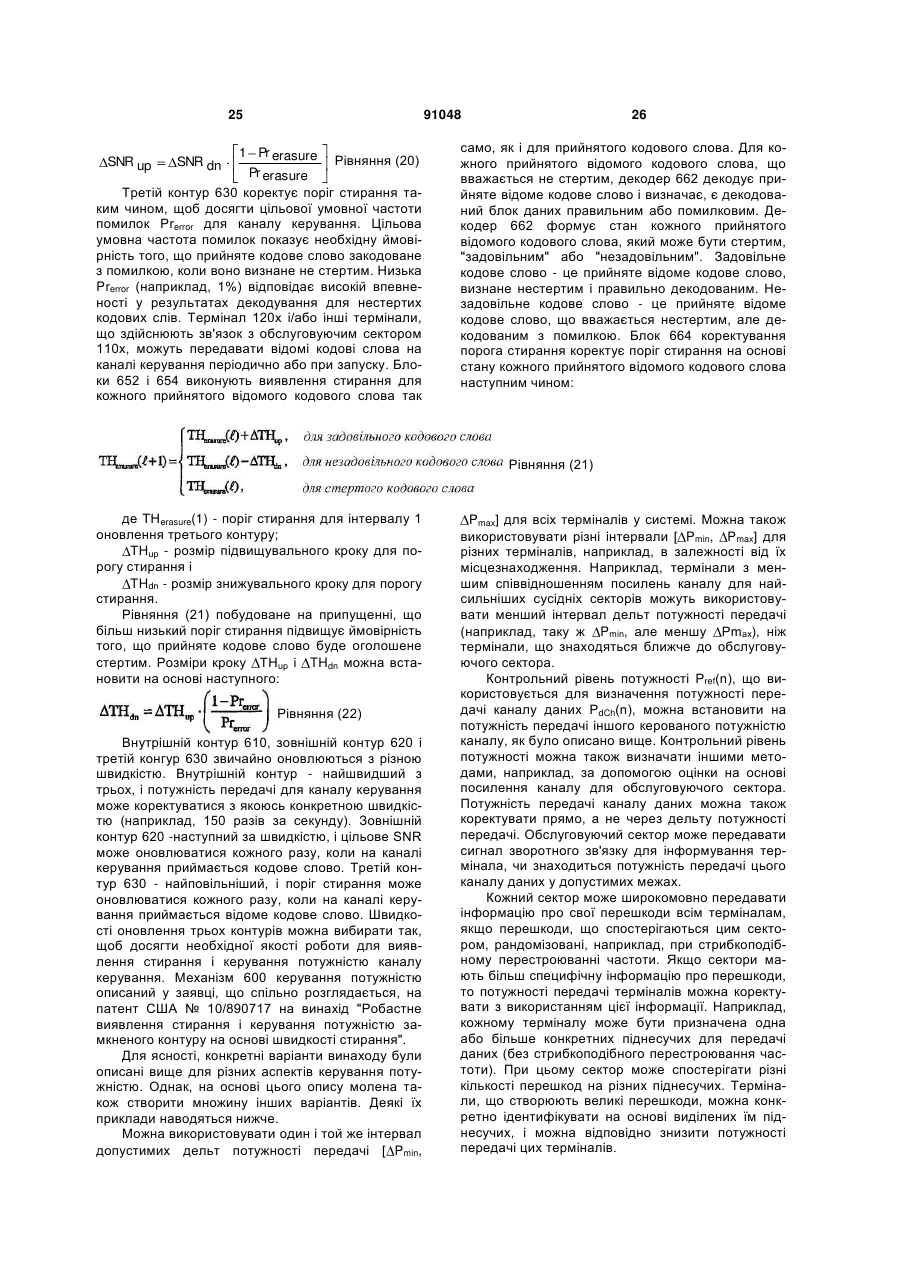
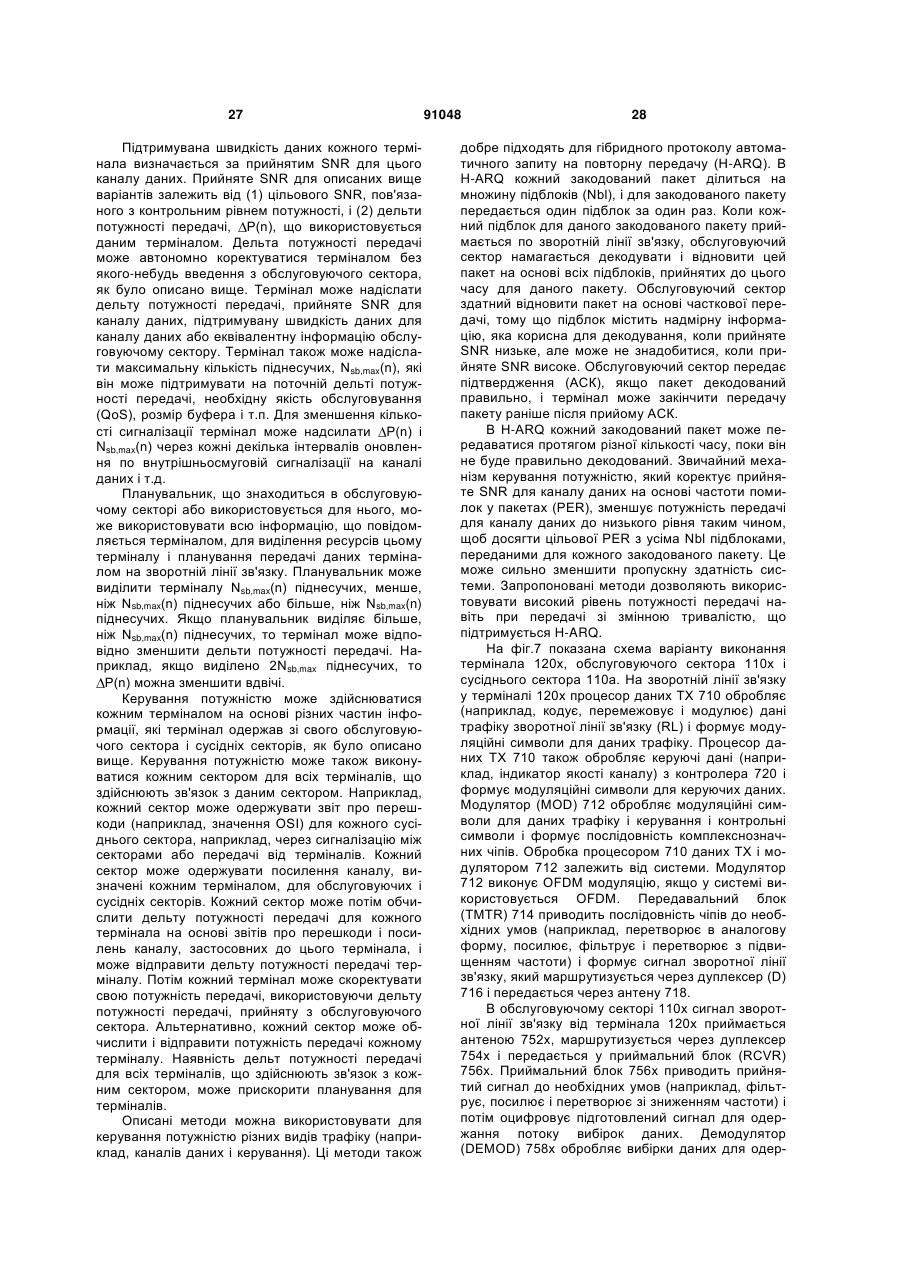
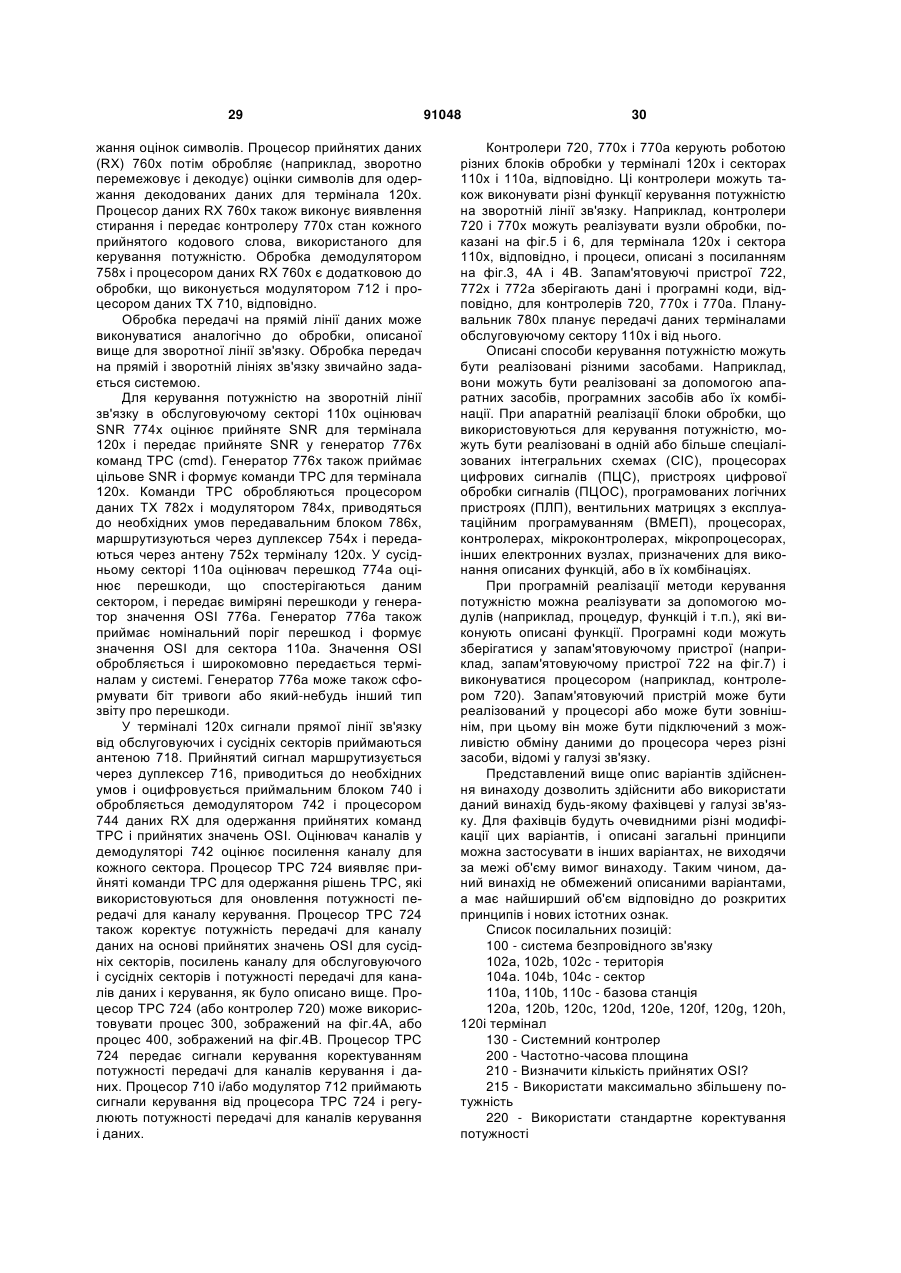
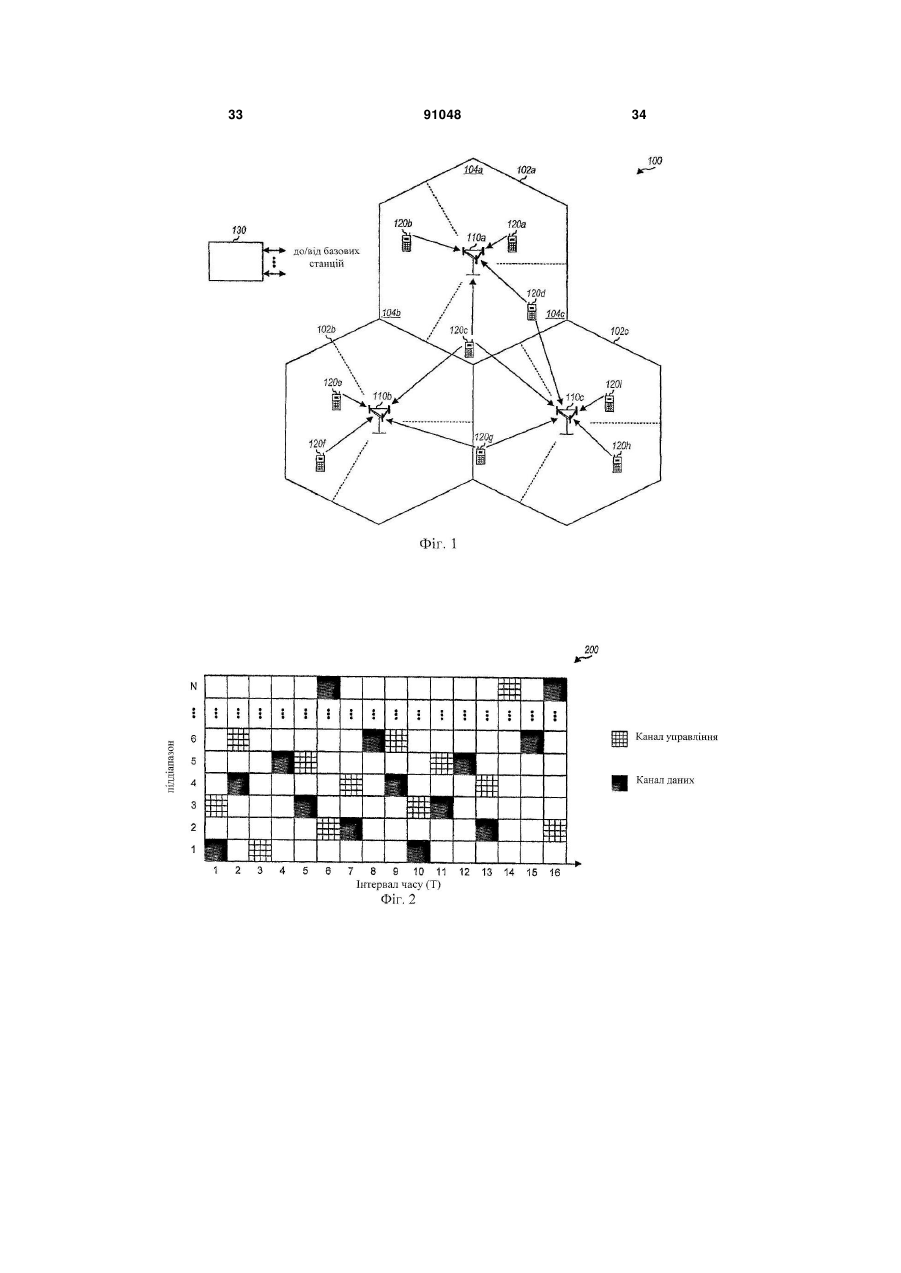
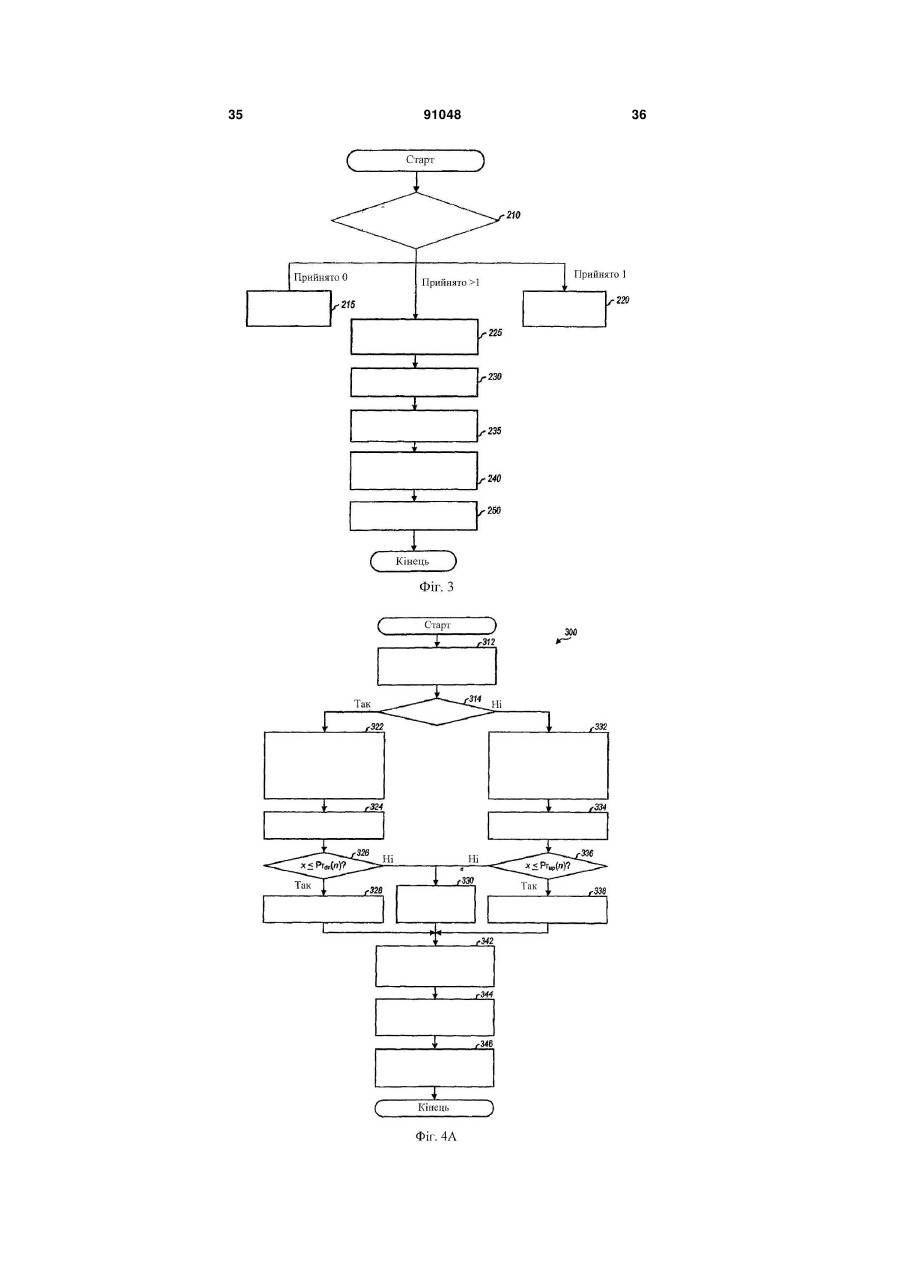
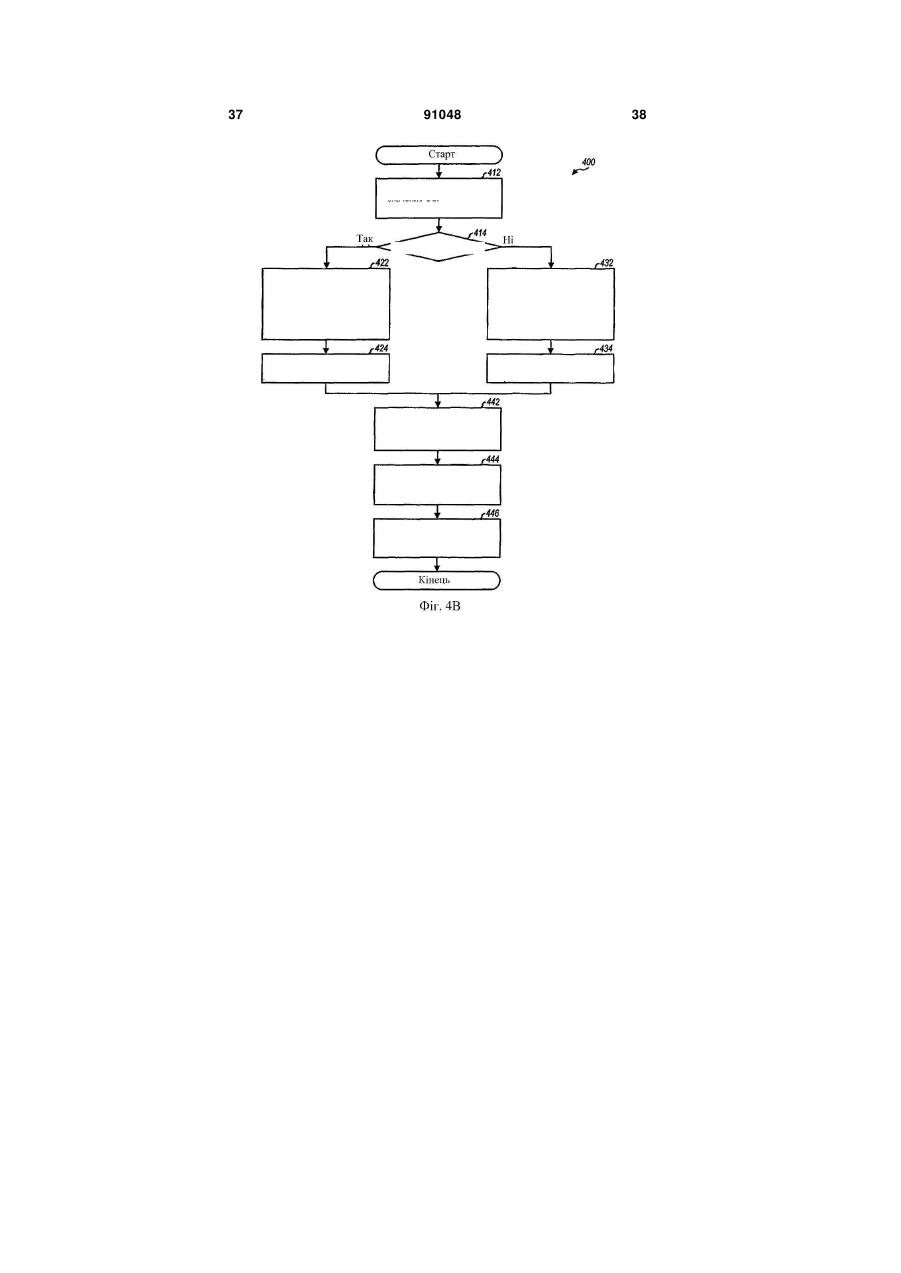
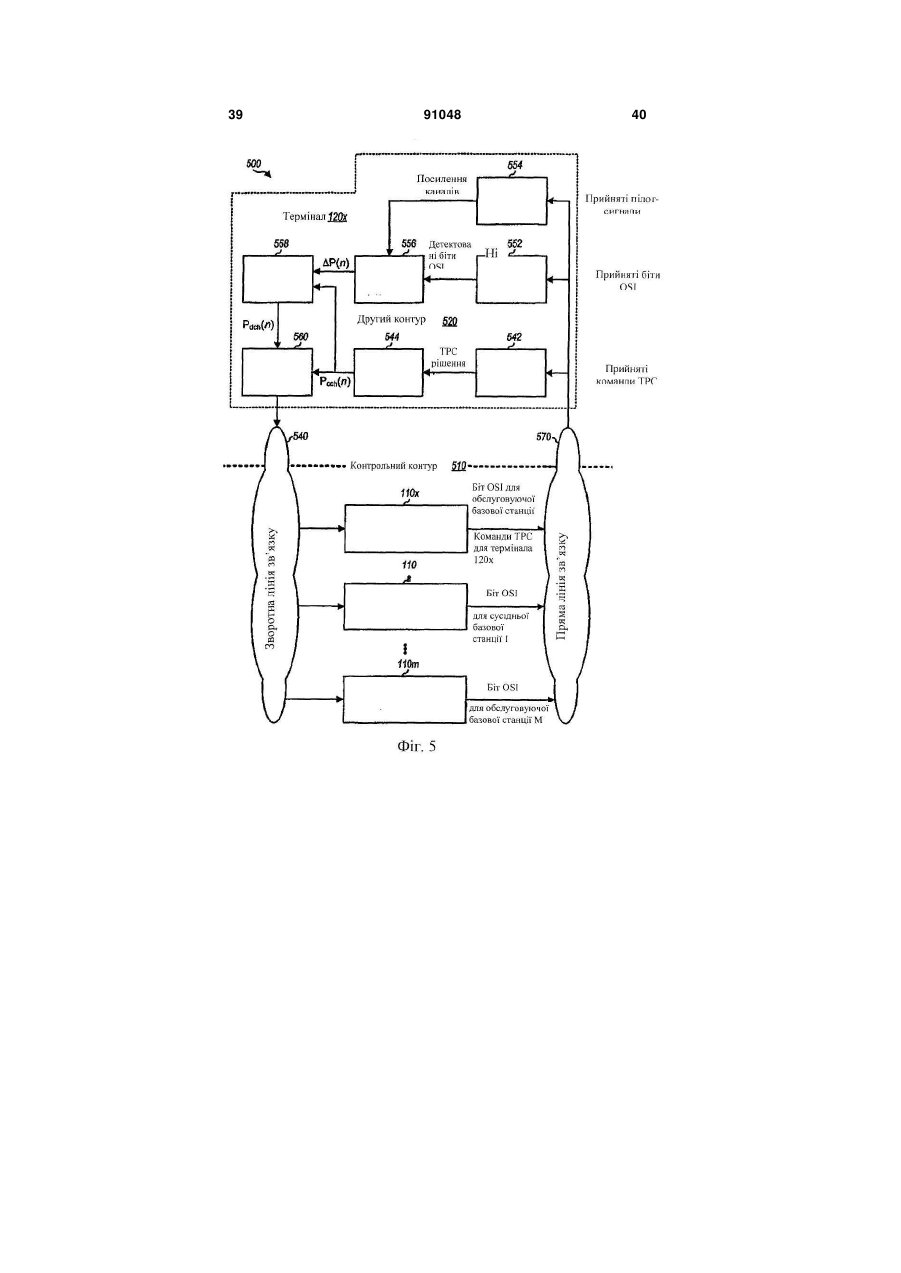
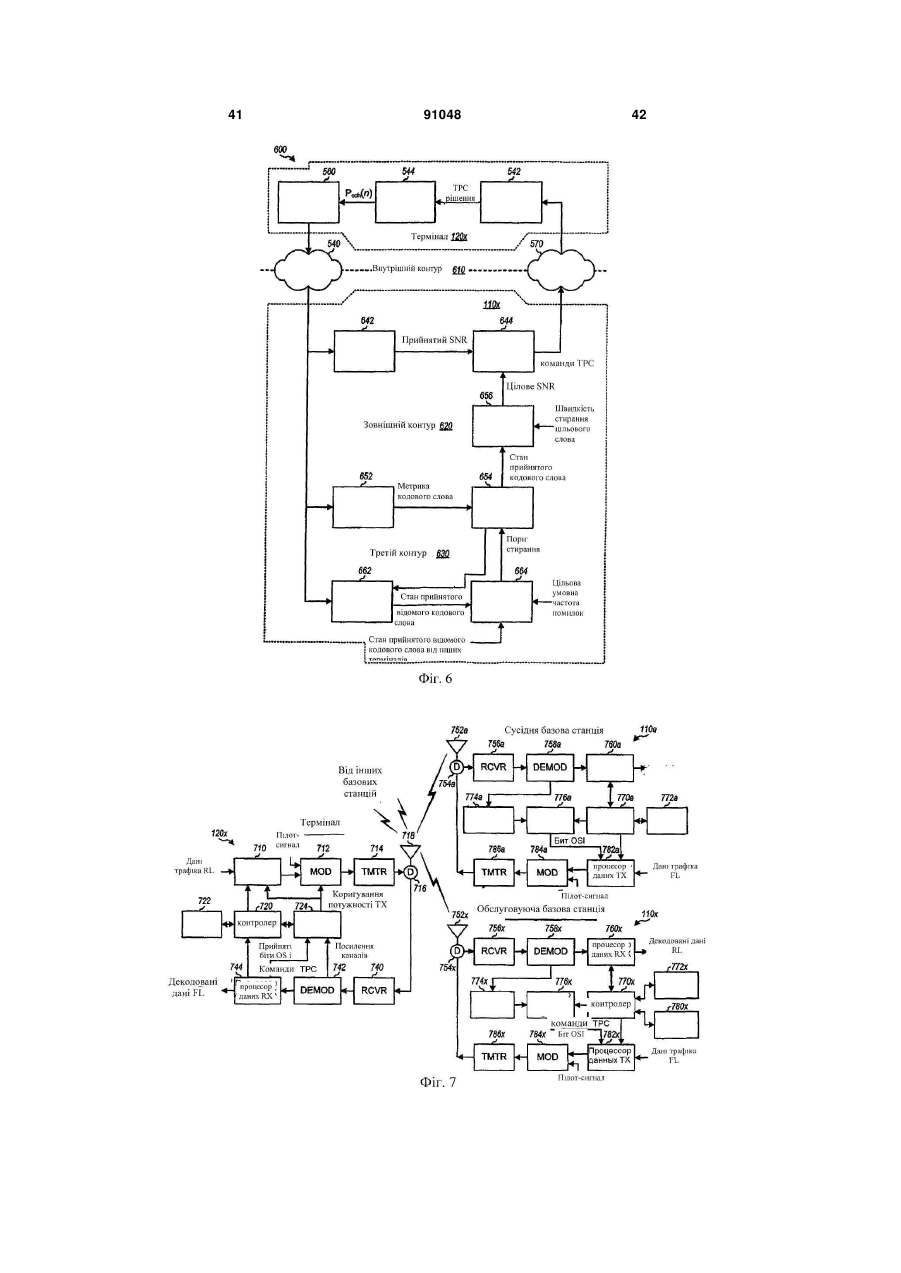
1. Спосіб здійснення керування потужністю бездротового термінала обслуговуючим сектором, який полягає в тому, що одержують щонайменше для двох секторів індикацію перешкод, які спостерігаються даним сектором, причому кожний сектор є або сусіднім сектором, не призначеним для прийому передачі даних, відправленої бездротовим терміналом, або обслуговуючим сектором, призначеним для прийому передачі даних, відправленої бездротовим терміналом, поєднують кожну індикацію перешкод, одержану зі згаданих щонайменше двох секторів, індикація містить перший біт, який показує, чи перебувають перешкоди, які спостерігаються даним сектором, вище або нижче першого порога перешкод; і коректують потужність передачі для передачі даних на підставі об'єднаних індикацій. 2. Спосіб за п. 1, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод. 3. Спосіб за п. 1, в якому при об'єднанні присвоюють ваговий коефіцієнт кожній індикації. 4. Спосіб за п. 3, в якому при присвоєнні вагового коефіцієнта ваговий коефіцієнт присвоюють на підставі відношення підсилень каналу для кожного сектора відносно обслуговуючого сектора. 5. Спосіб за п. 4, в якому обслуговуючим сектором є обслуговуючий сектор зворотної лінії зв'язку. 2 (19) 1 3 91048 4 запам'ятовуючий пристрій, зв'язаний із процесором. 15. Пристрій за п. 14, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод. 16. Пристрій за п. 14, в якому процесор виконаний з можливістю об'єднання за допомогою присвоєння вагового коефіцієнта кожній індикації. 17. Пристрій за п. 16, в якому процесор виконаний з можливістю присвоєння вагового коефіцієнта на підставі відношення підсилень каналу для кожного сектора відносно обслуговуючого сектора. 18. Пристрій за п. 17, в якому обслуговуючим сектором є обслуговуючий сектор зворотної лінії зв'язку. 19. Пристрій за п. 17, в якому процесор виконаний з можливістю визначення порогового значення для кожної індикації і присвоєння вагового коефіцієнта кожному пороговому значенню згідно з відношенням підсилень каналу. 20. Пристрій за п. 17, в якому процесор виконаний з можливістю коректування потужності передачі на підставі об'єднаної індикації і імовірності. 21. Пристрій за п. 20, в якому процесор виконаний з можливістю визначення імовірності підвищувального або понижувального коректування потужності передачі на підставі відношень підсилень каналів для кожного зі згаданих щонайменше двох секторів. 22. Пристрій за п. 21, в якому процесор виконаний з можливістю визначення імовірності на підставі поточного рівня потужності передачі для передачі даних. 23. Пристрій за п. 21, в якому процесор виконаний з можливістю коректування потужності передачі кроками, які мають фіксований розмір, відповідно до згаданої певної імовірності. 24. Пристрій за п. 21, в якому процесор виконаний з можливістю визначення розміру кроку і коректування на підставі об'єднаних індикацій і розміру кроку. 25. Пристрій за п. 24, в якому процесор виконаний з можливістю визначення розміру кроку на підставі поточного рівня потужності передачі для передачі даних. 26. Пристрій для здійснення керування потужністю бездротового термінала в системі бездротового зв'язку, який містить: засіб для одержання для щонайменше двох секторів індикації перешкод, які спостерігаються даним сектором, причому індикація містить перший біт, який показує, чи перебувають перешкоди, які спостерігаються даним сектором, вище або нижче першого порога перешкод, причому кожний сектор є або сусіднім сектором, не призначеним для прийому передачі даних, відправленої даним бездротовим терміналом, або обслуговуючим сектором, призначеним для прийому передачі даних, відправленої даним бездротовим терміналом, засіб для об'єднання кожної індикації перешкод, прийнятої зі згаданих щонайменше двох секторів, і засіб для коректування потужності передачі для передачі даних на підставі об'єднаних індикацій. 27. Пристрій за п. 26, в якому індикація додатково містить другий біт, який показує, чи перевищують перешкоди, які спостерігаються даним сектором, другий поріг перешкод, який вищий, ніж перший поріг перешкод. 28. Пристрій за п. 26, в якому засіб для об'єднання містить засіб для присвоєння вагового коефіцієнта кожній індикації. 29. Пристрій за п. 28, в якому засіб для присвоєння вагового коефіцієнта містить засіб для присвоєння вагового коефіцієнта на підставі відношення підсилень каналів для кожного сектора відносно обслуговуючого сектора. 30. Пристрій за п. 29, який додатково містить засіб для визначення порогового значення для кожної індикації, а засіб для присвоєння вагового коефіцієнта містить засіб для присвоєння вагового коефіцієнта кожному пороговому значенню згідно з відношенням підсилень каналів. 31. Пристрій за п. 29, який додатково містить засіб для обчислення підсилень каналу на підставі одержаних пілот-сигналів. 32. Пристрій за п. 29, в якому засіб для коректування потужності передачі містить засіб для коректування на підставі об'єднаної індикації і імовірності. 33. Пристрій за п. 29, в якому засіб для коректування потужності передачі містить засіб для визначення розміру кроку коректування потужності передачі на підставі обчислених відношень підсилень каналів і коректування на підставі об'єднаних індикацій і розміру кроку. Пріоритет даної заявки заявлений на основі дати подачі попередньої заявки № 60/662301 на винахід "Об'єднання інформації про множину інших секторів при керуванні потужністю системи безпровідного зв'язку з використанням ортогонального мультиплексування", поданої 15 березня 2005 p., попередньої заявки № 60/731037 на винахід "Способи і пристрої для зменшення МАС у мобільному широкосмуговому безпровідному середовищі" і попередньої заявки №60/731126 на винахід "Способи і пристрої для збільшення МАС у мобільному широкосмуговому безпровідному середовищі", поданих 27 жовтня 2005 p., які включені у даний документ як посилання. Галузь техніки, якої стосується винахід Даний винахід стосується, загалом, галузі зв'язку і, більш конкретно, використання інформації з множини секторів для керування потужністю безпровідного термінала. 5 Рівень техніки Система безпровідного зв'язку з багатостанційним доступом може підтримувати зв'язок для множини безпровідних терміналів одночасно. Кожний термінал здійснює зв'язок з одним або більше секторами за допомогою передач на прямих і зворотних лініях зв'язку. Під прямою (або низхідною) лінією зв'язку мається на увазі лінія зв'язку, що веде від секторів до терміналів, а під зворотною (або висхідною) лінією зв'язку мається на увазі лінія зв'язку, що веде від терміналів до секторів. Множина терміналів може одночасно вести передачу на зворотній лінії зв'язку завдяки мультиплексуванню їх передач ортогонально одна одній. При мультиплексуванні докладаються зусилля для забезпечення ортогональності між множиною передач на зворотній лінії зв'язку у часовій, частотній і/або кодовій області. Повна ортогональність, якщо вона досягається, приводить до того, що передача від кожного термінала не створює перешкод для передач від інших терміналів у приймальному секторі. Однак, часто повну ортогональність між передачами з різних терміналів неможливо реалізувати через стан каналів, недосконалість приймачів і т.п. Втрата ортогональності приводить до того, що кожний термінал створює деяку кількість перешкод для інших терміналів, які здійснюють зв'язок з тим самим сектором. Крім того, передачі з терміналів, що здійснюють зв'язок з різними секторами, звичайно не ортогональні одна одній. Тому кожний термінал може також створювати перешкоди для терміналів, що здійснюють зв'язок з сусідніми секторами. При цьому якість роботи кожного термінала погіршується внаслідок перешкод від всіх інших терміналів у системі. Тому існує потреба у способах зменшення впливу перешкод, які б дозволили підвищити якість роботи. Суть винаходу Запропоновані способи керування потужністю передачі для передачі даних з безпровідного термінала, що дозволяють зменшити "внутрішньосекторні" і "міжсекторні" перешкоди. Потужність передачі регулюється таким чином, щоб підтримувати у межах допустимих рівнів як величину внутрішньосекторних перешкод, які термінал може створити "обслуговуючому" сектору, так і величину міжсекторних перешкод, які термінал може створити "сусіднім" секторам (визначення термінів у лапках буде подане нижче). Величину міжсекторних перешкод, які може створити термінал, можна приблизно оцінити на основі (1) загальних перешкод, що спостерігаються кожним сусіднім сектором, (2) посилень каналів для обслуговуючих і сусідніх секторів, (3) поточного рівня потужності передачі, що використовується терміналом, і (4) можливо, інших параметрів. Кожний сектор може широкомовно передавати звіт (наприклад, якесь значення), що вказує загальні перешкоди, які спостерігаються у цьому секторі. Посилення каналу для кожного сектора можна оцінити на основі пілот-сигналу, одержаного з даного сектора. Потужність передачі можна коректувати ймовірнісним методом, детермінованим методом або якимсь іншим методом на 91048 6 основі об'єднання звітів про перешкоди з множини секторів для одного коректування потужності передачі. Звичайно, потужність передачі можна зменшити, якщо у сусідніх секторах спостерігається високий рівень перешкод, і збільшити, якщо спостерігається низький рівень перешкод. Потужність передачі можна змінювати на більшу величину і/або більш часто, якщо (1) термінал розташований ближче до сусіднього сектора, який спостерігає високий рівень перешкод, і/або (2) поточний рівень потужності передачі є вищим. Потужність передачі можна змінювати на меншу величину і/або більш рідко, якщо (1) термінал розташований ближче до обслуговуючого сектора, і/або (2) поточний рівень потужності передачі є нижчим. Внутрішньосекторні перешкоди, викликані даним терміналом, підтримуються у допустимих межах шляхом обмеження якості сигналу (SNR), що приймається для передачі даних у межах допустимих SNR. Далі будуть більш детально описані різні аспекти і варіанти даного винаходу. Короткий опис креслень Істотні ознаки і суть даного винаходу стануть більш зрозумілими з наведеного нижче докладного опису у поєднанні з доданими кресленнями, на яких однакові елементи вказані однаковими посилальними позначеннями і на яких фіг. 1 зображає систему безпровідного зв'язку з багатостанційним доступом; фіг.2 зображає стрибкоподібне перестроювання частоти на частотно-часовій площині; фіг.3 ілюструє спосіб коректування потужності передачі шляхом об'єднання індикацій перешкод з множини секторів; фіг.4А ілюструє спосіб коректування потужності передачі ймовірнісним методом; фіг.4В ілюструє спосіб коректування потужності передачі детермінованим методом; фіг. 5 зображає механізм керування потужністю для каналу даних; фіг.6 зображає механізм керування потужністю для каналу керування, і фіг.7 зображає термінал, обслуговуючий сектор і сусідній сектор. Здійснення винаходу Термін "зразковий" у даному контексті означає "такий, що служить як приклад або ілюстрація". Будь-який варіант або конструкцію, описані як "зразкові", не треба обов'язково розглядати як переважні або такі, що володіють перевагами у порівнянні з іншими варіантами або конструкціями. На фіг. 1 зображена система 100 безпровідного зв'язку з багатостанційним доступом. Система 100 містить множину базових станцій ПО, які підтримують зв'язок для множини без провідних терміналів 120. Термінали 120 звичайно розосереджені по всій системі, і кожний з них може бути стаціонарним або рухомим. Термінал може також називатися мобільною станцією, абонентським апаратом (АА), пристроєм безпровідного зв'язку або іншим терміном. Під базовою станцією мається на увазі стаціонарна станція, що використовується для здійснення зв'язку з терміналами, і вона може також називатися точкою доступу, вузлом В 7 або іншим терміном. Системний контролер 130 пов'язаний з базовими станціями 110, а також здійснює керування маршрутизацією даних для терміналів, що обслуговуються цими базовими станціями. Кожна базова станція 110 забезпечує охоплення зв'язком на відповідній території 102. Базова станція і/або її зона охоплення може називатися "стільником" в залежності від контексту, в якому використовується даний термін. Для збільшення пропускної здатності зона охоплення кожної базової станції може бути розділена на множину (наприклад, три) секторів 104. Кожний сектор обслуговується базовою приймально-передавальною підсистемою (BTS). Термін "сектор" може стосуватися BTS і/або її зони охоплення, в залежності від контексту, в якому використовується даний термін. Базова станція розділеного на сектори стільника звичайно включає в себе всі BTS для всіх секторів даного стільника. Для простоти, у подальшому термін "базова станція" використовується як родове поняття як для стаціонарної станції, яка обслуговує стільник, так і для стаціонарної станції, яка обслуговує сектор. "Обслуговуюча" базова станція або "обслуговуючий" сектор - це станція або сектор, з якими здійснює зв'язок даний термінал. "Сусідня" базова станція або "сусідній" сектор - це станція або сектор, з якими даний термінал не здійснює зв'язок. Для простоти надалі передбачається, що кожний термінал здійснює зв'язок з однією обслуговуючою базовою станцією, хоча це і не є необхідним обмеженням для запропонованих способів. Описані способи керування потужністю можна використовувати у різних системах безпровідного зв'язку. Наприклад, їх можна використовувати у системі з багатостанційним доступом з часовим розділенням каналів (TDMA), системі з багатостанційним доступом з частотним розділенням каналів (FDMA), системі з ортогональним багатостанційним доступом з частотним розділенням каналів (OFDMA) і т.п. У системі TDMA використовується часове мультиплексування (TDM), і передачі для різних терміналів ортогоналізуються шляхом їх передачі у різних інтервалах часу. У системі FDMA використовується частотне мультиплексування (FDM), і передачі для різних терміналів ортогоналізуються за допомогою передачі на різних піднесучих. У системах TDMA і FDMA можна також використовувати кодове мультиплексування (CDM). У цьому випадку передачі для множини терміналів можна ортогоналізувати за допомогою різних ортогональних кодів (наприклад, коду Уолша), навіть якщо вони відправляються в одному і тому ж інтервалі часу або на одній і тій же піднесучій. У системі OFDMA використовується ортогональне частотне мультиплексування (OFDM), яке фактично розділяє всю ширину смуги системи на множину (N) ортогональних піднесучих. Ці піднесучі також можуть називатися тонами, бінами, частотними каналами і т.д. Кожну піднесучу можна модулювати даними. У системі OFDMA можна використовувати будь-які комбінації часового, частотного і/або кодового мультиплексування. Для ясності запро 91048 8 поновані методи керування потужністю будуть описуватися надалі для системи OFDMA. На фіг.2 показане стрибкоподібне перестроювання частоти (FH) на частотно-часовій площині 200 для системи OFDMA. При стрибкоподібному перестроюванні частоти кожний канал трафіку пов'язаний з конкретною послідовністю FH, яка вказує конкретну піднесучу(і) для використання з даним каналом трафіку у кожному інтервалі часу. Послідовності FH для різних каналів трафіку у кожному секторі ортогональні одна одній, так що жодні два канали трафіку не використовують одну і ту ж піднесучу у будь-якому інтервалі часу. Послідовності FH для кожного сектора також псевдовипадкові відносно послідовностей FH для найближчих секторів. Перешкоди між двома каналами трафіку у двох секторах виникають у тому випадку, якщо ці два канали трафіку використовують одну і ту ж піднесучу в одному і тому ж інтервалі часу. Однак, міжсекторні перешкоди рандомізуються завдяки псевдовипадковому характеру послідовностей FH, що використовуються для різних секторів. Канали даних можуть виділятися активним терміналам таким чином, щоб кожний канал даних використовувався усього одним терміналом у будь-який даний момент часу. Для економії ресурсів системи можна розділяти канали керування між множиною терміналів, використовуючи, наприклад, кодове мультиплексування. Якщо канали даних мультиплексуються ортогонально тільки за частотою і часом (але не кодом), то вони менш схильні до втрати ортогональності через умови каналу і недосконалість приймачів, ніж канали керування. Отже, канали даних мають декілька ключових параметрів, пов'язаних з керуванням потужністю. По-перше, внутрішньостільникові перешкоди на каналах даних мінімальні завдяки ортогональному частотному і часовому мультиплексуванню. Подруге, міжстільникові перешкоди рандомізовані завдяки тому, що сусідні сектори використовують різні послідовності FH. Величина міжстільникових перешкод, створених даним терміналом, визначається (1) рівнем потужності передачі, що використовується даним терміналом, і (2) положенням термінала відносно сусідніх секторів. Для каналів даних керування потужністю можна здійснювати таким чином, щоб кожному терміналу дозволялося вести передачу з можливим високим рівнем потужності, зберігаючи при цьому внутрішньостільникові і міжстільникові перешкоди на допустимому рівні. Терміналу, розташованому ближче до його обслуговуючого сектора, можна дозволити вести передачу з більш високим рівнем потужності, оскільки цей термінал, ймовірно, створить менше перешкод для сусідніх секторів. І навпаки, терміналу, розташованому далі від його обслуговуючого сектора у напрямі до краю сектора, можна дозволити вести передачу з більш низьким рівнем потужності, оскільки цей термінал може створювати більше перешкод для сусідніх секторів. Таке керування потужністю передачі може потенційно зменшити загальний рівень перешкод, що спостерігається у кожному секторі, і при цьому 9 дозволяє "кваліфікованим" терміналам досягати більш високих SNR, а значить більш високих швидкостей передачі даних. Для досягнення перерахованих цілей керування потужністю каналів даних можна реалізувати різними методами. Для пояснення далі буде описаний конкретний варіант керування потужністю. У цьому варіанті потужність передачі каналу даних для даного термінала можна виразити наступним чином: Рівняння (1) Pdch(n)=Pref(n)+ P(n) де Pdch(n) - потужність передачі каналу даних для інтервалу оновлення п; Pref(n) - контрольний рівень потужності для інтервалу оновлення n і P(n) - дельта потужності передачі для інтервалу оновлення n. Рівні потужності Pdch(n) і Pref(n) і дельта потужності передачі Р(n) наводяться у децибелах (дБ). Контрольний рівень потужності - це величина потужності передачі, необхідна для досягнення цільової якості сигналу для призначеної передачі (наприклад, на каналі керування). Якість сигналу (позначену як SNR) можна кількісно виразити у вигляді співвідношення сигнал-шум, співвідношення сигнал-шум плюс перешкоди і т.п. Контрольний рівень потужності і цільову SNR можна коректувати за допомогою механізму керування потужністю для забезпечення необхідного рівня якості роботи для призначеної передачі, як буде описано нижче. Якщо контрольний рівень потужності може досягти цільової SNR, то прийняту SNR для каналу даних можна оцінити наступним чином: SNRdch(n)=SNRtarget(n)+AP(n) Рівняння (2) Рівняння (2) базується на припущенні, що канал даних і канал керування мають однакову статистику перешкод. Це має місце, наприклад, якщо канали керування і даних з різних секторів можуть створювати взаємні перешкоди. Контрольний рівень потужності можна визначити так, як буде описано нижче. Потужність передачі для каналу даних можна встановити на основі різних факторів, таких як (1) величина міжсекторних перешкод, які може створити даний термінал для інших терміналів у сусідніх секторах; (2) величина внутрішньосекторних перешкод, які може створити даний термінал іншим терміналам у тому ж самому секторі; (3) максимальний рівень потужності, дозволений даному терміналу, і (4) можливо, інших факторів. Кожний з цих факторів буде описаний нижче. Величину внутрішньосекторних перешкод, які може створити кожний термінал, можна визначати різними методами. Наприклад, величину міжсекторних перешкод, що створюються кожним терміналом, може оцінювати безпосередньо кожний сусідній сектор і відправляти її терміналу, який може потім відповідно скоректувати потужність передачі на основі об'єднання переданих оцінок міжсекторних перешкод. Таке індивідуалізоване повідомлення про перешкоди може потребувати застосування великої службової сигналізації. Для простоти, величину міжсекторних перешкод, які може створити кожний термінал, можна приблизно оцінити на основі величини (1) загальних переш 91048 10 код, що спостерігаються у кожному сусідньому секторі, (2) посилень каналів для обслуговуючих і сусідніх секторів і (3) рівня потужності передачі, що використовується даним терміналом. Далі будуть описані величини (1) і (2). Кожний сектор може оцінити сумарну або середню величину перешкод, що спостерігаються даним сектором. Це можна реалізувати за допомогою оцінки потужності перешкод на кожній піднесучій і обчислення середньої потужності перешкод на основі оцінок потужності перешкод для окремих піднесучих. Середню потужність перешкод можна одержати, використовуючи різні методи виведення середнього, наприклад, арифметичний метод виведення середнього, геометричний метод виведення середнього, виведення середнього на основі SNR, і т.п. В окремих аспектах винаходу можна використовувати арифметичне виведення середнього значення перешкод у секторі. В інших аспектах можна використовувати геометричне виведення середнього. Можна також застосувати виведення середньої SNR в інших аспектах. Різні принципи і методи виведення середнього описані і розкриті у заявці, що спільно розглядається, на патент США 10/897463, яка згадується у даному документі у повному об'ємі як посилання. Незалежно від використовуваного методу виведення середнього, кожний сектор може фільтрувати оцінки потужності перешкод і/або середню потужність перешкод протягом множини інтервалів часу, щоб поліпшити якість вимірювання перешкод. Цю фільтрацію можна реалізувати за допомогою фільтра з кінцевою імпульсною характеристикою (КІХ), фільтра з нескінченною імпульсною характеристикою (НІХ) і деяких інших відомих типів фільтрів. Тому термін "перешкоди" може стосуватися як відфільтрованих, так і не відфільтрованих перешкод. Кожний сектор може широкомовно передавати свої виміри перешкод для використання терміналами в інших секторах. Широкомовна передача вимірів перешкод може бути реалізована різними способами. В одному варіанті середня потужність перешкод (або "виміряні" перешкоди) квантується у заздалегідь визначену кількість бітів, які потім надсилаються по широкомовному каналу. В іншому варіанті виміряні перешкоди широкомовно передаються за допомогою одного біта, який показує, є виміряні перешкоди більш високими або більш низькими, ніж номінальний поріг перешкод. У ще одному варіанті виміряні перешкоди передаються з використанням двох бітів. Один біт показує виміряні перешкоди відносно номінального порога перешкод. Інший біт можна використовувати як біт тривоги, що показує, чи перевищують виміряні перешкоди високий поріг перешкод. Виміри перешкод можна також передавати іншими способами. Для спрощення опису надалі передбачається, що для передачі інформації про перешкоди використовується один біт перешкод іншого сектора (OSI). Кожний сектор може встановити своє значення (OSIB) наступним чином: '0', якщо Imeas,m(n) щоб вона була у межах максимального рівня потужності (блок 346) наступним чином: Рівняння (17) 20 Ймовірності Prdn(n) і Prup(n) можуть бути функцією дельти потужності передачі, АР(п) і співвідношення посилень каналу для найсильнішого сусіднього сектора, rosib(n), або об'єднаного значення посилення каналу. Можна використовувати різні функції для Prdn(n) і Prup(n). Кожна функція може мати різний вплив на різні характеристики керування потужністю, такі як (1) швидкість збіжності коректування потужності передачі і (2) розподіл дельт потужності передачі для терміналів у системі. В одному варіанті ймовірності Pran(n) і Prup(n) можна визначити наступним чином: Термінал використовує потужність передачі Pdch(n+1) Для наступного інтервалу часу. Рівняння (18а) і Рівняння (18b) де Рівняння (18c) Рівняння (18d) Pr P(n) - ймовірність, що стосується рівня потужності передачі; Prgain(n) - ймовірність, що стосується співвідношення посилень каналу для найсильнішого сусіднього сектора; ~ ~ Pmax , Pmin, rmax, rmin - нормуючі постійні, вибрані для досягнення необхідних характеристик керування потужністю; Prup,min - мінімальна ймовірність підвищувального коректування потужності передачі, і Prdn,min - мінімальна ймовірність знижувального коректування потужності передачі. Для варіанту, показаного групою рівнянь (18), Prdn(n) і Prup(n) є об'єднаними ймовірностями, які визначаються рівнем потужності передачі і співвідношенням посилень каналу. Мінімальні ймовірності Prup,min і Prdn,min поліпшують характеристики стабільності і сприяють деякому переміщенню точок у крайніх межах (наприклад, дуже високих або дуже низьких значень посилення каналу). Ймовірності Prdn(n) і Prup(n), одержані, як показано групою рівнянь (15), відповідають загальним правилам коректування потужності передачі, описаним вище. Ймовірності Prdn(n) і Prup(n) можна також одержати за допомогою деяких інших функцій, і цей варіант також входить в об'єм винаходу. На фіг.4В показаний алгоритм процесу 400 коректування потужності передачі детермінованим способом. Процес 400 може також виконуватися кожним терміналом і для кожного інтервалу часу, в якому передається значення OSI. Термінал обробляє об'єднане значення OSI (блок 412) і визначає, дорівнює значення OSI Т, або '0', або '2' (блок 414). Якщо значення OSI дорівнює '1', то термінал визначає величину зменшення своєї потужності передачі, Pdn(n+l), для наступного інтервалу часу (блок 422). Змінний розмір знижувального кроку можна визначити на основі поточної дельти потужності передачі Р(n), і співвідношення посилень каналу, rosib(n). Потім термінал знижує дельту потужності передачі на Pdn(n+1) (блок 424). В іншому випадку, якщо значення OSI дорівнює '0', термінал визначає величину збільшення потужності передачі, Pup(n+1), для наступного інтервалу часу, наприклад, на основі АР(п) і rosib(n) (блок 432). Потім термінал підвищує дельту потужності передачі на Pup(n+1) (блок 434). Після блоків 424 і 434 термінал обмежує дельту потужності передачі для наступного інтервалу часу Р(n+1), щоб вона знаходилася у межах допустимого інтервалу [ Pmin, Pmax] (блок 442), і обчислює і обмежує потужність передачі для наступного інтервалу часу, щоб вона була у межах максимального рівня потужності передачі (блоки 444 і 446). Змінні розміри кроку Pdn(n+1) і Pup(n+1) можна визначати на основі заданої функції Р(n) і rosib(n), наприклад, подібної до функції, вираженої групою рівнянь (15). Змінні розміри кроку можна визначати пропорційно до Р(n) і обернено пропорційно до rosib(n). Ймовірності коректування і змінні розміри кроку можна також визначати за довідковою таблицею різних ймовірностей і значень розміру кроку для різних значень Р(n) і rosib(n) або якими-небудь іншими методами. На фіг.4А і 4В показані, відповідно, зразкові варіанти коректування потужності передачі ймові 21 рнісним і детермінованим способом. В ймовірнісному варіанті, показаному на фіг.4А, ймовірність коректування визначається на основі параметрів Р(n) і rosib(n) і використовуються фіксовані підвищувальні і знижувальні кроки для коректування потужності передачі. У детермінованому варіанті, показаному на фіг.4В, ймовірність регулювання встановлена на 1.0 і розміри підвищувального і знижувального кроку визначаються на основі параметрів Р(n) і rosib(n). У ці варіанти можна також внести різні модифікації. Наприклад, змінні розміри підвищувального і знижувального кроків можна використовувати також і для ймовірнісного варіанту. В іншому прикладі можна використовувати фіксовані підвищувальний і знижувальний кроки для детермінованого варіанту. Дельту потужності Р(n) каналу даних можна коректувати на основі значення OSI, посилення каналу, попередньої дельти потужності Р(n-1), інтервалу допустимих дельт потужності і максимального рівня потужності для терміналу, як було описано вище. Звичайно дельту потужності Р(n) можна коректувати на основі будь-якого параметра або будь-якої комбінації параметрів. Інші параметри, які можна використовувати для коректування Р(n), включають в себе поточну потужність передачі Pdch(n) коефіцієнт втрати потужності між піковою і середньою Рbo, "призначену" групу секторів, які потенційно можуть спостерігати високий рівень перешкод від даного термінала і т.п. Коефіцієнт втрати потужності між піковою і середньою можна визначити за кількістю піднесучих, що використовуються терміналом для передачі, і можна використовувати більш високе значення для Рbo, якщо для передачі використовується більше піднесучих. Потужність передачі для каналу даних може бути обмежена значенням, меншим ніж Рmах мінус цєй коефіцієнт втрати потужності, або Pdch(n) (Pmax- Рbo). Потужність передачі для термінала можна також коректувати на основі інших параметрів, критеріїв та інформації. Термінал може також коректувати потужність передачі на різні величини і/або різними способами на основі всієї інформації, наявної для секторів, які потрібно враховувати для коректування потужності передачі. На фіг.5 показаний механізм 500 керування потужністю, який можна використовувати для коректування потужності передачі для терміналу 120х у системі 100. Термінал 120х здійснює зв'язок з обслуговуючим сектором 110х і може створювати перешкоди для сусідніх секторів 110а-110m (хоча і різної величини). Механізм 500 керування потужністю включає в себе контрольний контур 510 і другий контур 520. Контрольний контур 510 діє між терміналом 120х і обслуговуючим сектором 110х. Другий контур 520 діє між терміналом 120х і сусідніми секторами 110а-110m і, можливо, обслуговуючим сектором 110х. Для простоти на фіг.5 показана тільки частина контурів 510 і 520, що знаходиться у терміналі 120х. Контрольний контур 510 коректує потужність передачі для каналу керування (або якогось іншого каналу трафіку) і прагне підтримувати прийнятий SNR для цього каналу керування, виміряний в 91048 22 обслуговуючому секторі 110х, якомога ближче до цільового SNR. Для контрольного контуру 510 обслуговуючий сектор 110х оцінює прийняте SNR для каналу керування, порівнює прийняте SNR з цільовим SNR і формує команди керування потужністю передачі (ТРС) на основі результатів порівняння, як буде описано нижче. Кожна команда ТРС може бути або (1) командою UP, що призначає збільшити потужність передачі для каналу керування, або (2) командою DOWN, що призначає зменшити потужність передачі. Обслуговуючий сектор ПОх передає команди ТРС на прямій лінії зв'язку (хмара 570) терміну 120х. Термінал 120х приймає і обробляє передачу по прямій лінії зв'язку з обслуговуючого сектора 110х і передає "прийняті" команди ТРС у процесор 542 команд ТРС. Кожна прийнята команда ТРС являє собою зашумлену версію команди ТРС, передану обслуговуючим сектором 110х. Процесор 542 виявляє кожну прийняту команду ТРС і одержує "рішення ТРС", яке може бути (1) рішенням UP (підвищення), якщо прийнята ТРС команда є командою UP, або (2) рішенням DOWN (зниження), якщо прийнята ТРС команда є командою DOWN. Блок 544 коректування потужності передачі (ТХ) каналу керування коректує потужність передачі для каналу керування, Pcch(n), на основі рішень ТРС з процесора 542 команд ТРС. Наприклад, блок 544 може підвищувати Pcch(n) на підвищувальний крок Pcch,up для кожного рішення UP і знижувати Pcch(n) на знижувальний крок Pcch,dn для кожного рішення DOWN. Процесор/модулятор 560 даних ТХ встановлює потужність передачі для каналу керування на рівень Pcch(n), вказаний блоком 544. Передача на каналі керування надсилається в обслуговуючий сектор 110х. Через втрати на трасі поширення сигналу і ефекти багатопроменевого поширення на зворотній лінії зв'язку (хмара 540), які типово змінюються у часі, особливо для мобільного термінала, прийняте SNR для каналу керування постійно коливається. Контрольний контур 510 прагне зберегти прийняте SNR рівним або близьким до цільового SNR у присутності змін в умовах каналу зворотної лінії зв'язку. Другий контур 520 коректує потужність передачі для каналу даних (або якогось іншого каналу трафіку) таким чином, щоб для каналу даних використовувався за можливістю найвищий рівень потужності, але при цьому міжсекторні і внутрішньосекторні перешкоди зберігалися у допустимих межах. Для другого контуру 520 процесор 552 значень OSI приймає і обробляє значення OSI, які широкомовно передаються сусідніми секторами 110а-110m і, можливо, обслуговуючим сектором 110х. Процесор 552 значень OSI передає виявлені значення OSI з секторів у блок 556 коректування дельти потужності передачі. Оцінювач 554 каналів приймає пілот-сигнали з обслуговуючих і сусідніх секторів, оцінює посилення каналу для кожного сектора і передає оцінні посилення каналу для всіх секторів у блок 556. Блок 556 визначає співвідношення посилень каналу для сусідніх секторів і визначає найсильніший сусідній сектор. Блок 556 коректує свою дельту потужності передачі АР(п) 23 для каналу даних на основі або об'єднаного значення OSI, або об'єднаного значення OSI і співвідношення посилень каналу для найсильнішого сусіднього сектора або об'єднаного співвідношення посилень каналів, як було описано вище. Блок 556 може реалізувати процес 300 або 400 і може коректувати АР(п) ймовірнісним або детермінованим методом, або як було описано у зв'язку з фіг.4А. Звичайно блок 556 може коректувати свою дельту потужності передачі ДР(п) на основі детектованих значень OSI і/або іншої відповідної інформації для будь-якої кількості секторів, які можуть включати в себе обслуговуючі і/або сусідні сектори. Блок 558 обчислення потужності передачі каналу даних приймає потужність передачі каналу керування Pcch(n), яка використовується як контрольний рівень потужності, Pref(n), і дельту потужності передачі, Р(n). Блок 558 обчислює потужність передачі Pdch(n) для каналу даних на основі Рcch(n) і Р(n). Блок 560 встановлює потужність передачі для каналу даних на рівень Pdch(n), вказаний блоком 558. Передача на каналі даних відправляється обслуговуючому сектору 110х. Передачі на каналах даних і керування можуть створювати перешкоди для сусідніх секторів 110а-110m. Кожний сектор 110 приймає передачі від терміналів по зворотній лінії зв'язку, оцінює перешкоди, що спостерігаються цим сектором, порівнює виміряні перешкоди з номінальним порогом перешкод, встановлює значення OSI відповідно на основі результату порівняння і широкомовно передає значення OSI по прямій лінії зв'язку. Контрольний контур 510 і другий контур 520 можуть діяти одночасно, але оновлюватися з різною швидкістю, при цьому контур 510 діє швидше, ніж контур 520. Швидкості оновлення цих двох контурів можна вибирати такими, щоб забезпечити необхідне керування потужністю. Контрольний контур 510 може оновлюватися зі швидкістю, наприклад, 150 разів за секунду, а другий контур може оновлюватися зі швидкістю, наприклад, 1020 разів за секунду. Контрольний контур 510 і другий контур 520 можуть оперувати з передачами, відправленими по каналу керування і каналу даних, відповідно. Каналам керування і даних можуть бути призначені різні піднесучі у кожному періоді стрибкоподібного перестроювання, як показано на фіг.2. У цьому випадку контрольний контур 510 і другий контур 520 можуть одночасно оперувати з передачами, відправленими на різних піднесучих. Канал керування може також мультиплексуватися з каналом даних (наприклад, за допомогою TDM і/або CDM) і передаватися на одних і тих же піднесучих. 91048 24 На фіг.6 показаний механізм 600 керування потужністю, який можна використовувати для каналу керування. Механізм 600 керування потужністю (який може використовуватися для контрольного контуру 510 на фіг.5) включає в себе внутрішній контур 610, зовнішній контур 620 і третій контур 630. Внутрішній контур 610 прагне зберегти прийняте SNR для каналу керування якомога ближче до цільового SNR. Для внутрішнього контуру 610 оцінювач SNR 642 в обслуговуючому секторі 110х оцінює прийняте SNR для каналу керування і передає прийняте SNR у генератор 644 команд TCP. Генератор 644 порівнює прийняте SNR з цільовим SNR і генерує команди ТРС на основі результатів порівняння. Обслуговуючий сектор 110х передає команди ТРС по прямій лінії зв'язку (хмара 570) терміналу 120х. Термінал 120х приймає і обробляє команди ТРС від обслуговуючого сектора 110х і коректує потужність передачі для каналу керування, як було описано вище для фіг.5. Дані можна відправляти у блоках на каналі керування, і кожний блок даних можна кодувати блоковим кодом для формування відповідного кодового слова (або кодованого блоку даних). Для каналу керування можна не використовувати код виявлення помилок. У цьому випадку обслуговуючий сектор може виконувати виявлення стирання для кожного прийнятого кодового слова, щоб визначити, є дане кодове слово стертим чи ні. Стерте кодове слово може розглядатися як ненадійне і оброблятися відповідним чином (наприклад, відкидатися). Виявлення стирання можна реалізувати за допомогою обчислення метрики для кожного прийнятого кодового слова, порівняння обчисленої метрики з порогом стирання і оголошення прийнятого кодового слова таким, що підлягає або не підлягає стиранню на основі результату порівняння. Зовнішній контур 620 коректує цільове SNR так, щоб забезпечити цільову швидкість стирання Prerasure для каналу керування. Цільова швидкість стирання вказує необхідну ймовірність (наприклад, 10%) оголошення прийнятого кодового слова стертим. Блок 652 обчислення метрики обчислює метрику для кожного прийнятого кодового слова. Детектор 654 стирання виконує виявлення стирання для кожного кодового слова на основі його обчисленої метрики і порога стирання і передає стан прийнятого кодового слова (є воно стертим або не стертим) блоку 656 коректування цільового SNR. Потім блок 656 коректує цільове SNR для каналу керування наступним чином: Рівняння (19) де SNRtarget(k) - цільове SNR для інтервалу оновлення зовнішнього контуру к; SNRup - розмір підвищувального кроку для цільового SNR і SNRdn - розмір знижувального кроку для цільового SNR. Розміри кроку SNRup і SNRdn можна встановити наступним чином: 25 91048 1 Pr erasure Рівняння (20) Pr erasure Третій контур 630 коректує поріг стирання таким чином, щоб досягти цільової умовної частоти помилок Prerror для каналу керування. Цільова умовна частота помилок показує необхідну ймовірність того, що прийняте кодове слово закодоване з помилкою, коли воно визнане не стертим. Низька Prerror (наприклад, 1%) відповідає високій впевненості у результатах декодування для нестертих кодових слів. Термінал 120х і/або інші термінали, що здійснюють зв'язок з обслуговуючим сектором 110х, можуть передавати відомі кодові слова на каналі керування періодично або при запуску. Блоки 652 і 654 виконують виявлення стирання для кожного прийнятого відомого кодового слова так SNR up SNR dn 26 само, як і для прийнятого кодового слова. Для кожного прийнятого відомого кодового слова, що вважається не стертим, декодер 662 декодує прийняте відоме кодове слово і визначає, є декодований блок даних правильним або помилковим. Декодер 662 формує стан кожного прийнятого відомого кодового слова, який може бути стертим, "задовільним" або "незадовільним". Задовільне кодове слово - це прийняте відоме кодове слово, визнане нестертим і правильно декодованим. Незадовільне кодове слово - це прийняте відоме кодове слово, що вважається нестертим, але декодованим з помилкою. Блок 664 коректування порога стирання коректує поріг стирання на основі стану кожного прийнятого відомого кодового слова наступним чином: Рівняння (21) де THerasure(1) - поріг стирання для інтервалу 1 оновлення третього контуру; ТНuр - розмір підвищувального кроку для порогу стирання і THdn - розмір знижувального кроку для порогу стирання. Рівняння (21) побудоване на припущенні, що більш низький поріг стирання підвищує ймовірність того, що прийняте кодове слово буде оголошене стертим. Розміри кроку ТНuр і THdn можна встановити на основі наступного: Рівняння (22) Внутрішній контур 610, зовнішній контур 620 і третій конгур 630 звичайно оновлюються з різною швидкістю. Внутрішній контур - найшвидший з трьох, і потужність передачі для каналу керування може коректуватися з якоюсь конкретною швидкістю (наприклад, 150 разів за секунду). Зовнішній контур 620 -наступний за швидкістю, і цільове SNR може оновлюватися кожного разу, коли на каналі керування приймається кодове слово. Третій контур 630 - найповільніший, і поріг стирання може оновлюватися кожного разу, коли на каналі керування приймається відоме кодове слово. Швидкості оновлення трьох контурів можна вибирати так, щоб досягти необхідної якості роботи для виявлення стирання і керування потужністю каналу керування. Механізм 600 керування потужністю описаний у заявці, що спільно розглядається, на патент США № 10/890717 на винахід "Робастне виявлення стирання і керування потужністю замкненого контуру на основі швидкості стирання". Для ясності, конкретні варіанти винаходу були описані вище для різних аспектів керування потужністю. Однак, на основі цього опису молена також створити множину інших варіантів. Деякі їх приклади наводяться нижче. Можна використовувати один і той же інтервал допустимих дельт потужності передачі [ Pmin, Pmax] для всіх терміналів у системі. Можна також використовувати різні інтервали [ Pmin, Pmax] для різних терміналів, наприклад, в залежності від їх місцезнаходження. Наприклад, термінали з меншим співвідношенням посилень каналу для найсильніших сусідніх секторів можуть використовувати менший інтервал дельт потужності передачі (наприклад, таку ж Pmin, але меншу Рmах), ніж термінали, що знаходяться ближче до обслуговуючого сектора. Контрольний рівень потужності Pref(n), що використовується для визначення потужності передачі каналу даних PdCh(n), можна встановити на потужність передачі іншого керованого потужністю каналу, як було описано вище. Контрольний рівень потужності можна також визначати іншими методами, наприклад, за допомогою оцінки на основі посилення каналу для обслуговуючого сектора. Потужність передачі каналу даних можна також коректувати прямо, а не через дельту потужності передачі. Обслуговуючий сектор може передавати сигнал зворотного зв'язку для інформування термінала, чи знаходиться потужність передачі цього каналу даних у допустимих межах. Кожний сектор може широкомовно передавати інформацію про свої перешкоди всім терміналам, якщо перешкоди, що спостерігаються цим сектором, рандомізовані, наприклад, при стрибкоподібному перестроюванні частоти. Якщо сектори мають більш специфічну інформацію про перешкоди, то потужності передачі терміналів можна коректувати з використанням цієї інформації. Наприклад, кожному терміналу може бути призначена одна або більше конкретних піднесучих для передачі даних (без стрибкоподібного перестроювання частоти). При цьому сектор може спостерігати різні кількості перешкод на різних піднесучих. Термінали, що створюють великі перешкоди, можна конкретно ідентифікувати на основі виділених їм піднесучих, і можна відповідно знизити потужності передачі цих терміналів. 27 Підтримувана швидкість даних кожного термінала визначається за прийнятим SNR для цього каналу даних. Прийняте SNR для описаних вище варіантів залежить від (1) цільового SNR, пов'язаного з контрольним рівнем потужності, і (2) дельти потужності передачі, Р(n), що використовується даним терміналом. Дельта потужності передачі може автономно коректуватися терміналом без якого-небудь введення з обслуговуючого сектора, як було описано вище. Термінал може надіслати дельту потужності передачі, прийняте SNR для каналу даних, підтримувану швидкість даних для каналу даних або еквівалентну інформацію обслуговуючому сектору. Термінал також може надіслати максимальну кількість піднесучих, Nsb,max(n), які він може підтримувати на поточній дельті потужності передачі, необхідну якість обслуговування (QoS), розмір буфера і т.п. Для зменшення кількості сигналізації термінал може надсилати Р(n) і Nsb,max(n) через кожні декілька інтервалів оновлення по внутрішньосмуговій сигналізації на каналі даних і т.д. Планувальник, що знаходиться в обслуговуючому секторі або використовується для нього, може використовувати всю інформацію, що повідомляється терміналом, для виділення ресурсів цьому терміналу і планування передачі даних терміналом на зворотній лінії зв'язку. Планувальник може виділити терміналу Nsb,max(n) піднесучих, менше, ніж Nsb,max(n) піднесучих або більше, ніж Nsb,max(n) піднесучих. Якщо планувальник виділяє більше, ніж Nsb,max(n) піднесучих, то термінал може відповідно зменшити дельти потужності передачі. Наприклад, якщо виділено 2Nsb,max піднесучих, то Р(n) можна зменшити вдвічі. Керування потужністю може здійснюватися кожним терміналом на основі різних частин інформації, які термінал одержав зі свого обслуговуючого сектора і сусідніх секторів, як було описано вище. Керування потужністю може також виконуватися кожним сектором для всіх терміналів, що здійснюють зв'язок з даним сектором. Наприклад, кожний сектор може одержувати звіт про перешкоди (наприклад, значення OSI) для кожного сусіднього сектора, наприклад, через сигналізацію між секторами або передачі від терміналів. Кожний сектор може одержувати посилення каналу, визначені кожним терміналом, для обслуговуючих і сусідніх секторів. Кожний сектор може потім обчислити дельту потужності передачі для кожного термінала на основі звітів про перешкоди і посилень каналу, застосовних до цього термінала, і може відправити дельту потужності передачі терміналу. Потім кожний термінал може скоректувати свою потужність передачі, використовуючи дельту потужності передачі, прийняту з обслуговуючого сектора. Альтернативно, кожний сектор може обчислити і відправити потужність передачі кожному терміналу. Наявність дельт потужності передачі для всіх терміналів, що здійснюють зв'язок з кожним сектором, може прискорити планування для терміналів. Описані методи можна використовувати для керування потужністю різних видів трафіку (наприклад, каналів даних і керування). Ці методи також 91048 28 добре підходять для гібридного протоколу автоматичного запиту на повторну передачу (H-ARQ). В H-ARQ кожний закодований пакет ділиться на множину підблоків (Nbl), і для закодованого пакету передається один підблок за один раз. Коли кожний підблок для даного закодованого пакету приймається по зворотній лінії зв'язку, обслуговуючий сектор намагається декодувати і відновити цей пакет на основі всіх підблоків, прийнятих до цього часу для даного пакету. Обслуговуючий сектор здатний відновити пакет на основі часткової передачі, тому що підблок містить надмірну інформацію, яка корисна для декодування, коли прийняте SNR низьке, але може не знадобитися, коли прийняте SNR високе. Обслуговуючий сектор передає підтвердження (АСК), якщо пакет декодований правильно, і термінал може закінчити передачу пакету раніше після прийому АСК. В H-ARQ кожний закодований пакет може передаватися протягом різної кількості часу, поки він не буде правильно декодований. Звичайний механізм керування потужністю, який коректує прийняте SNR для каналу даних на основі частоти помилок у пакетах (PER), зменшує потужність передачі для каналу даних до низького рівня таким чином, щоб досягти цільової PER з усіма Nbl підблоками, переданими для кожного закодованого пакету. Це може сильно зменшити пропускну здатність системи. Запропоновані методи дозволяють використовувати високий рівень потужності передачі навіть при передачі зі змінною тривалістю, що підтримується H-ARQ. На фіг.7 показана схема варіанту виконання термінала 120х, обслуговуючого сектора 110х і сусіднього сектора 110а. На зворотній лінії зв'язку у терміналі 120х процесор даних ТХ 710 обробляє (наприклад, кодує, перемежовує і модулює) дані трафіку зворотної лінії зв'язку (RL) і формує модуляційні символи для даних трафіку. Процесор даних ТХ 710 також обробляє керуючі дані (наприклад, індикатор якості каналу) з контролера 720 і формує модуляційні символи для керуючих даних. Модулятор (MOD) 712 обробляє модуляційні символи для даних трафіку і керування і контрольні символи і формує послідовність комплекснозначних чіпів. Обробка процесором 710 даних ТХ і модулятором 712 залежить від системи. Модулятор 712 виконує OFDM модуляцію, якщо у системі використовується OFDM. Передавальний блок (TMTR) 714 приводить послідовність чіпів до необхідних умов (наприклад, перетворює в аналогову форму, посилює, фільтрує і перетворює з підвищенням частоти) і формує сигнал зворотної лінії зв'язку, який маршрутизується через дуплексер (D) 716 і передається через антену 718. В обслуговуючому секторі 110х сигнал зворотної лінії зв'язку від термінала 120х приймається антеною 752х, маршрутизується через дуплексер 754х і передається у приймальний блок (RCVR) 756х. Приймальний блок 756х приводить прийнятий сигнал до необхідних умов (наприклад, фільтрує, посилює і перетворює зі зниженням частоти) і потім оцифровує підготовлений сигнал для одержання потоку вибірок даних. Демодулятор (DEMOD) 758х обробляє вибірки даних для одер 29 жання оцінок символів. Процесор прийнятих даних (RX) 760х потім обробляє (наприклад, зворотно перемежовує і декодує) оцінки символів для одержання декодованих даних для термінала 120х. Процесор даних RX 760х також виконує виявлення стирання і передає контролеру 770х стан кожного прийнятого кодового слова, використаного для керування потужністю. Обробка демодулятором 758х і процесором даних RX 760х є додатковою до обробки, що виконується модулятором 712 і процесором даних ТХ 710, відповідно. Обробка передачі на прямій лінії даних може виконуватися аналогічно до обробки, описаної вище для зворотної лінії зв'язку. Обробка передач на прямій і зворотній лініях зв'язку звичайно задається системою. Для керування потужністю на зворотній лінії зв'язку в обслуговуючому секторі 110х оцінювач SNR 774х оцінює прийняте SNR для термінала 120х і передає прийняте SNR у генератор 776х команд ТРС (cmd). Генератор 776х також приймає цільове SNR і формує команди ТРС для термінала 120х. Команди ТРС обробляються процесором даних ТХ 782х і модулятором 784х, приводяться до необхідних умов передавальним блоком 786х, маршрутизуються через дуплексер 754х і передаються через антену 752х терміналу 120х. У сусідньому секторі 110а оцінювач перешкод 774а оцінює перешкоди, що спостерігаються даним сектором, і передає виміряні перешкоди у генератор значення OSI 776а. Генератор 776а також приймає номінальний поріг перешкод і формує значення OSI для сектора 110а. Значення OSI обробляється і широкомовно передається терміналам у системі. Генератор 776а може також сформувати біт тривоги або який-небудь інший тип звіту про перешкоди. У терміналі 120х сигнали прямої лінії зв'язку від обслуговуючих і сусідніх секторів приймаються антеною 718. Прийнятий сигнал маршрутизується через дуплексер 716, приводиться до необхідних умов і оцифровується приймальним блоком 740 і обробляється демодулятором 742 і процесором 744 даних RX для одержання прийнятих команд ТРС і прийнятих значень OSI. Оцінювач каналів у демодуляторі 742 оцінює посилення каналу для кожного сектора. Процесор ТРС 724 виявляє прийняті команди ТРС для одержання рішень ТРС, які використовуються для оновлення потужності передачі для каналу керування. Процесор ТРС 724 також коректує потужність передачі для каналу даних на основі прийнятих значень OSI для сусідніх секторів, посилень каналу для обслуговуючого і сусідніх секторів і потужності передачі для каналів даних і керування, як було описано вище. Процесор ТРС 724 (або контролер 720) може використовувати процес 300, зображений на фіг.4А, або процес 400, зображений на фіг.4В. Процесор ТРС 724 передає сигнали керування коректуванням потужності передачі для каналів керування і даних. Процесор 710 і/або модулятор 712 приймають сигнали керування від процесора ТРС 724 і регулюють потужності передачі для каналів керування і даних. 91048 30 Контролери 720, 770х і 770а керують роботою різних блоків обробки у терміналі 120х і секторах 110х і 110а, відповідно. Ці контролери можуть також виконувати різні функції керування потужністю на зворотній лінії зв'язку. Наприклад, контролери 720 і 770х можуть реалізувати вузли обробки, показані на фіг.5 і 6, для термінала 120х і сектора 110х, відповідно, і процеси, описані з посиланням на фіг.3, 4А і 4В. Запам'ятовуючі пристрої 722, 772х і 772а зберігають дані і програмні коди, відповідно, для контролерів 720, 770х і 770а. Планувальник 780х планує передачі даних терміналами обслуговуючому сектору 110х і від нього. Описані способи керування потужністю можуть бути реалізовані різними засобами. Наприклад, вони можуть бути реалізовані за допомогою апаратних засобів, програмних засобів або їх комбінації. При апаратній реалізації блоки обробки, що використовуються для керування потужністю, можуть бути реалізовані в одній або більше спеціалізованих інтегральних схемах (СІС), процесорах цифрових сигналів (ПЦС), пристроях цифрової обробки сигналів (ПЦОС), програмованих логічних пристроях (ПЛП), вентильних матрицях з експлуатаційним програмуванням (ВМЕП), процесорах, контролерах, мікроконтролерах, мікропроцесорах, інших електронних вузлах, призначених для виконання описаних функцій, або в їх комбінаціях. При програмній реалізації методи керування потужністю можна реалізувати за допомогою модулів (наприклад, процедур, функцій і т.п.), які виконують описані функції. Програмні коди можуть зберігатися у запам'ятовуючому пристрої (наприклад, запам'ятовуючому пристрої 722 на фіг.7) і виконуватися процесором (наприклад, контролером 720). Запам'ятовуючий пристрій може бути реалізований у процесорі або може бути зовнішнім, при цьому він може бути підключений з можливістю обміну даними до процесора через різні засоби, відомі у галузі зв'язку. Представлений вище опис варіантів здійснення винаходу дозволить здійснити або використати даний винахід будь-якому фахівцеві у галузі зв'язку. Для фахівців будуть очевидними різні модифікації цих варіантів, і описані загальні принципи можна застосувати в інших варіантах, не виходячи за межі об'єму вимог винаходу. Таким чином, даний винахід не обмежений описаними варіантами, а має найширший об'єм відповідно до розкритих принципів і нових істотних ознак. Список посилальних позицій: 100 - система безпровідного зв'язку 102а, 102b, 102с - територія 104а. 104b, 104с - сектор 110а, 110b, 110с - базова станція 120а, 120b, 120с, 120d, 120e, 120f, 120g, 120h, 120i термінал 130 - Системний контролер 200 - Частотно-часова площина 210 - Визначити кількість прийнятих OSI? 215 - Використати максимально збільшену потужність 220 - Використати стандартне коректування потужності 31 225 - Визначити посилення каналу для кожної базової станції, для якої були одержані значення OSI 230 - Визначити поріг OSI для кожної базової станції 235 - Визначити коректування потужності для кожної базової станції на основі порогу 240 - Сформувати вагове рішення на основі об'єднаних коректувань потужності 250 - Скоректувати потужність на основі вагового рішення 300 - Процес коректування потужності передачі ймовірнісним методом 312 - Визначити об'єднане значення OSI 314 - Об'єднане значення OSI > Th? 322 - Визначити ймовірність зменшення потужності передачі, Prdn(n), на основі дельти потужності передачі і об'єднаного значення OSI 324 - Довільно вибрати значення х між 0,0 і 1,0 328 - Зменшити дельту потужності передачі на знижувальний крок Pdn 330 - Зберегти дельту потужності передачі на тому ж рівні 332 - Визначити ймовірність збільшення потужності передачі, Рrup(n) на основі дельти потужності передачі і об'єднаного значення OSI 334 - Довільно вибрати значення х між 0,0 і 1,0 338 - Підвищити дельту потужності передачі на підвищувальний крок Рuр 342 - Обмежити дельту потужності передачі у допустимому інтервалі [ Pmin, Pmax] 344 - Обчислити потужність передачі для наступного інтервалу часу на основі дельти потужності передачі 346 - Обмежити дельту потужності передачі на максимальному рівні потужності Рmах 400 - Процес коректування потужності передачі детермінованим способом 412 - Визначити об'єднане значення OSI 414 - Об'єднане значення OSI > Th? 422 - Визначити величину зменшення потужності передачі, Pdn(n+1), на основі дельти потужності передачі і об'єднаного значення OSI 424 - Зменшити дельту потужності передачі на знижувальний крок Рdn(n+1) 432 - Визначити величину збільшення потужності передачі, Ріір(n+1), на основі дельти потужності передачі і об'єднаного значення OSI 434 - Збільшити дельту потужності передачі на підвищувальний крок Pup(n+1) 442 - Обмежити дельту потужності передачі є допустимому інтервалі [ Pmin, Pmax] 91048 32 444 - Обчислити потужність передачі для наступного інтервалу часу на основі дельти потужності передачі 446 - Обмежити дельту потужності передачі на максимальному рівні потужності Рmах 500 - Механізм керування потужністю 510 - Контрольний контур 520 - Другий контур 540 - Зворотна лінія зв'язку 542 - Процесор команд ТРС 544 - Коректування потужності каналу керування ТХ 552 - Процесор бітів OSI 554 - Оцінювач каналів 556 - Коректування дельти потужності передачі 558 - Обчислення потужності ТХ каналу даних 560 - Процесор/модулятор даних ТХ 570 - Пряма лінія зв'язку 600 - Механізм керування потужністю 610 - Внутрішній контур 620 - Зовнішній контур 630 - Третій контур 642 - Оцінювач SNR 644 - Генератор команд ТРС 652 - Обчислення метрики 654 - Детектор стирання 656 - Коректування цільового SNR 662 - Декодер 664 - Коректування порога стирання 710 - Процесор даних ТХ 712 - Модулятор 714 - Передавальний блок 716 - Дуплексер 718 - Антена 720 - Контролер 722 - Запам'ятовуючий пристрій 724 - Процесор ТРС 740 - Приймальний блок 742 - Демодулятор 744 - Процесор даних RX 752а, 752х - Антена 754а, 754х - Дуплексер 756а, 756х - Приймальний блок 758а, 75 8х - Демодулятор 760а, 760х - Процесор даних RX 770а, 770х - Контролер 772а, 772х - Запам'ятовуючий пристрій 774а, 774х - Оцінювач перешкод 776а, 776х - Генератор бітів OSI 782a, 782x - Процесор даних ТХ 784а, 784х - Модулятор 786а, 786х - Передавальний блок 33 91048 34 35 91048 36 37 91048 38 39 91048 40 41 91048 42 43 Комп’ютерна верстка Г. Паяльніков 91048 Підписне 44 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInterference information from plurality of sectors for adjusting transmit power
Автори англійськоюMese Murat, Sutivong Arak
Назва патенту російськоюИнформация о помехах из множества секторов для управления мощностью
Автори російськоюМесе Мурат, Сутивонг Арак
МПК / Мітки
МПК: H04B 7/005
Мітки: перешкоди, інформація, потужністю, множині, секторів, керування
Код посилання
<a href="https://ua.patents.su/22-91048-informaciya-pro-pereshkodi-z-mnozhini-sektoriv-dlya-keruvannya-potuzhnistyu.html" target="_blank" rel="follow" title="База патентів України">Інформація про перешкоди з множини секторів для керування потужністю</a>
Спосіб корекції рівнів потужності множини передач у безпровідній системі зв’язку (варіанти), пристрій керування потужністю для використання у безпровідній системі зв’язку та пристрій керування потужністю у базо
Номер патенту: 71054
Опубліковано: 15.11.2004
Автори: Джоу Ю-Чен, Чен Тао
МПК: H04B 7/005
Мітки: рівнів, спосіб, керування, множині, потужності, потужністю, базо, пристрій, передач, безпровідній, системі, корекції, використання, варіанти, зв'язку
Формула / Реферат:
1. Спосіб корекції рівнів потужності множини передач у безпровідній системі зв'язку, який включає:- прийом першого показника якості першої прийнятої передачі,- корекцію рівня потужності першої передачі, базуючись щонайменше частково на цьому першому показнику,- прийом другого показника якості другої прийнятої передачі, сформованого агрегуванням сукупності біт, призначених зворотному зв'язку для другої передачі, і-...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: каналів, систем, розподілом, система, пдкр, паралельного, спосіб, потужністю, замкнений, кодовим, режимом, керування, замкнена, зв'язку, варіанти, доступу, системі
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Спосіб та приймач для моніторингу якості інформації у безпровідному каналі звязку, спосіб визначення полярності бітів керування потужністю, а також спосіб моніторингу якості субканалу керування потужністю та пр
Номер патенту: 74167
Опубліковано: 15.11.2005
Автори: Тіедеманн Едвард Дж., молодший, Лінг Фун'юн, Чен Тао
МПК: H04B 7/005, H04L 1/00, H04Q 7/00, H04B 1/00, H04L 25/00, H04B 7/00
Мітки: керування, потужністю, каналі, субканалу, полярності, також, визначення, приймач, бітів, зв'язку, якості, моніторингу, безпровідному, спосіб, інформації
Формула / Реферат:
1. Спосіб моніторингу якості інформації, прийнятої у безпровідному каналі зв'язку, який включає операції:прийому інформації, яка містить як відому, так і невідому інформацію,створення заміщаючої частоти появи хибних бітів на основі відомої інформації ізастосування заміщаючої частоти появи хибних бітів до невідомої.2. Спосіб за п. 1, який відрізняється тим, що у переданий сигнал безпровідного каналу зв'язку не...
Керування потужністю за допомогою методик стирання
Номер патенту: 90679
Опубліковано: 25.05.2010
Автори: Сутівонг Арак, Агравал Авніш, Джуліан Девід Джонатан
МПК: H04L 1/00, H04B 7/005, H04L 1/20
Мітки: допомогою, потужністю, стирання, керування, методик
Формула / Реферат:
1. Спосіб керування потужністю передачі термінала за допомогою базової станції в системі безпровідного зв'язку, що містить етапи, на яких приймають від термінала кодове слово через першу лінію безпровідного зв'язку; обчислюють метрику виявлення стирання для прийнятого кодового слова і порівнюють обчислену метрику виявлення стирання з порогом стирання, встановленим для досягнення бажаних канальних характеристик; генерують повідомлення для...
Спосіб керування передачами (варіанти), спосіб експлуатації множини передавальних вузлів (варіанти) та спосіб забезпечення передачі даних до множини приймальних вузлів (варіанти) у безпровідній системі зв’язку
Номер патенту: 73979
Опубліковано: 17.10.2005
Автори: Голцман Джек, Антоніо Франклін П., Воллес Марк, Волтон Джей Р.
Мітки: керування, приймальних, передавальних, множині, варіанти, експлуатації, даних, зв'язку, забезпечення, передачами, спосіб, безпровідній, передачі, системі, вузлів
Формула / Реферат:
1. Спосіб керування передачами у системі зв'язку, який полягає у:визначенні однієї або декількох характеристик системи зв'язку, включаючи імовірності навантажень для системи зв'язку,розділенні наявних ресурсів системи на множину каналів,визначенні множини коефіцієнтів втрати потужності для множини каналів, на основі щонайменше частково визначених одній або декількох характеристиках системи зв'язку, причому кожний канал...
Попередній патент: Спосіб обробітку ґрунту і обладнання для його здійснення
Наступний патент: Академічний велосипед
Випадковий патент: Спосіб вимірювання ефективної площі розсіяння великогабаритних об'єктів в ближній зоні