Способи та пристрої для визначення імпульсної характеристики каналів поширення, які включають емітери, рефлектори та датчики, які є фіксованими або рухомими
Номер патенту: 102230
Опубліковано: 25.06.2013
Автори: Піпон Франсуа, Делаво Франсуа, Шевальє Паскаль


Формула / Реферат
1. Спосіб визначення одного або кількох параметрів імпульсної характеристики каналу поширення, який включає емітери, рефлектори або датчики, які є фіксованими або рухомими, для виявлення і для визначення позиції та кінематичних параметрів цих емітерів та рефлекторів у системі, яка включає N датчиків, які отримують сигнали від вищезгаданих емітерів, або відбиття на вищезгаданих рефлекторах з N, який є більшим або дорівнює 2, спосіб включає принаймні такі етапи:
o застосування поєднання просторового аналізу та аналізу відстані затримки/кінематики доплерівського зсуву для визначення функції невизначеності,
o визначення принаймні однієї достатньої статистики ![]() (l, m, K) що відповідає кореляції між відомим сигналом s(kTe), що відповідає комплексній обвідній надісланого сигналу, який піддається можливій трансформації, пов’язаній з припущеннями, які стосуються позицій та кінематики емітерів, приймачів та рефлекторів, і стосується коливань поширення та виходу просторового фільтра w (l, m), де l означає набір часових припущень, і m означає набір частотних припущень, що складає як вхідні дані спостереження xm((k+l)Te), 0 £ k £ K‑1, де Te є періодом дискретизації датчика, який отримує сигнали, визначаючи значення пари (l, m) шляхом порівняння значення статистики для пари (l, m) зі значенням межі виявлення, причому
(l, m, K) що відповідає кореляції між відомим сигналом s(kTe), що відповідає комплексній обвідній надісланого сигналу, який піддається можливій трансформації, пов’язаній з припущеннями, які стосуються позицій та кінематики емітерів, приймачів та рефлекторів, і стосується коливань поширення та виходу просторового фільтра w (l, m), де l означає набір часових припущень, і m означає набір частотних припущень, що складає як вхідні дані спостереження xm((k+l)Te), 0 £ k £ K‑1, де Te є періодом дискретизації датчика, який отримує сигнали, визначаючи значення пари (l, m) шляхом порівняння значення статистики для пари (l, m) зі значенням межі виявлення, причому
у випадках, коли часові параметри, які позначаються як l, обмежуються затримкою або відстанню, і параметри кінематики, позначені як m, обмежуються доплерівським зсувом або відносною швидкістю, включає принаймні такі етапи:
для кожного припущення затримки l та кожного припущення доплерівського зсуву m: якщо m є доплерівським / кінематичним параметром, який вказує змінні xm та rxms,
- визначення вектора ![]() xms(lTe) (5) на основі K відомих зразків, s(kTe), надісланого сигналу та K спостережень, які мають зсув за частотою,
xms(lTe) (5) на основі K відомих зразків, s(kTe), надісланого сигналу та K спостережень, які мають зсув за частотою,![]()
- визначення матриці ![]() xm(lTe) на основі K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1
xm(lTe) на основі K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1
- розрахунок достатньої статистики
![]() , де
, де ![]()
є визначеним за найменшими квадратами середньої потужності відомого сигналу,
- встановлення межі виявлення для даної ймовірності хибного сигналу
- порівняння статистики ![]() (l, m, K) з незмінним межовим значенням і впорядкування виявлення емітера або рефлектора у стільнику відстані/доплерівського зсуву (l, m), якщо перевищується межове значення
(l, m, K) з незмінним межовим значенням і впорядкування виявлення емітера або рефлектора у стільнику відстані/доплерівського зсуву (l, m), якщо перевищується межове значення
- визначення відносної затримки та відстані емітера або рефлектора на основі l
- визначення відносного доплерівського зсуву та швидкості емітера або рефлектора на основі m
- визначення просторового стільника емітера або рефлектора на основі напрямного вектора ![]() s на антені сигналу, який надсилається від емітера або рефлектора, взятого як
s на антені сигналу, який надсилається від емітера або рефлектора, взятого як ![]() s =
s = ![]() xms(lTe).
xms(lTe).
2. Спосіб за п. 1, який відрізняється тим, що у найбільш складних випадках
3A) часові параметри включають у визначення, такі, як затримки-позиції, позначені як l, у визначення параметрів частоти, таких, як кінематика доплерівського зсуву, позначених як m, і у визначення відомого сигналу s у кожному припущенні l та m, змінні та трансформації сигналу, викликані переміщеннями емітера, приймача або рефлектора і коливаннями каналу поширення, залежно від припущення затримки-позиції, припущення відносної швидкості доплерівського зсуву, часу інтеграції обробки, еквівалентної ширини смуги сигналу, еквівалентної тривалості сигналу та його періодичності, якщо він є пульсуючим під час інтеграції обробки, від коливання затримки за цей час, від коливання доплерівського зсуву за цей час,
3B) сигнал sl,m, отриманий від трансформації s, використовують згідно з часовими припущеннями, позначеними як l, та частотними припущеннями, позначеними як m.
3. Спосіб за п. 2, який відрізняється тим, що коливання затримки є коливанням, модельованим до першого порядку часовою лінійною змінною.
4. Спосіб за п. 2, який відрізняється тим, що коливання доплерівського зсуву є модельованим до першого порядку доплерівською лінійною змінною.
5. Спосіб за будь-яким з пп. 1 та 2, який відрізняється тим, що, для виявлення емітера або рефлектора, сигнал якого зазнає високих перешкод, сигнал x’m((k+l)Te) та опорний сигнал s’ використовують замість вхідного сигналу xm((k+l)Te та первісного опорного сигналу s, сигнал x’m((k+l)Te)) отримують від сигналу xm((k+l)Te), і опорний сигнал s’ отримують від первісного опорного сигналу s або від трансформованого опорного сигналу sl,m за допомогою операцій, які включають посилення фільтрів простору-часу, наприклад, таким чином:
6A) для кожного інтерферуючого емітера:
визначення імпульсної характеристики gint поширення фільтра від емітера до приймача шляхом мінімізації критерію ![]() , опорний сигнал Sint=(sint((l0+l)Te), sint((l0+l+1)Te),...,sint((l0+l+L-1)Te))T або Sint,m,l"=(sintm,l»((l0+l)Te), sintm,l»((l0+l+1)Te),...,sintm,l»((l0+l+L-1)Te))T отримують або на основі загального апріорного знання первісного інтерферуючого сигналу, або на основі часткового апріорного знання первісного інтерферуючого сигналу, або шляхом демодуляції/вирівнювання первісного інтерферуючого сигналу у будь-який спосіб, відомий спеціалістам у даній галузі, і піддають можливій трансформації до Sint,m,l
, опорний сигнал Sint=(sint((l0+l)Te), sint((l0+l+1)Te),...,sint((l0+l+L-1)Te))T або Sint,m,l"=(sintm,l»((l0+l)Te), sintm,l»((l0+l+1)Te),...,sintm,l»((l0+l+L-1)Te))T отримують або на основі загального апріорного знання первісного інтерферуючого сигналу, або на основі часткового апріорного знання первісного інтерферуючого сигналу, або шляхом демодуляції/вирівнювання первісного інтерферуючого сигналу у будь-який спосіб, відомий спеціалістам у даній галузі, і піддають можливій трансформації до Sint,m,l
6B) для одного або кількох інтерферуючих емітерів, які є фіксованими або мають відому кінематику і вибираються згідно з їхньою частотою та стійкістю у часі,
різні частотні припущення включають в опорний сигнал Sint , і повтори, присутні в опорному сигналі, використовують для точного визначення, на великій довжині інтеграції K, відхилень частоти та часу відносно інтерферуючого емітера, дрейфи відносно інтерферуючого емітера визначають для місцевих гетеродинів мікшерів та тактових генераторів системи для приймання та дискретизації сигналів, які використовують для втілення винаходу.
6. Спосіб за п. 5, який відрізняється тим, що, під час етапу 6B:
фільтр поширення gint, пов’язаний з інтерферуючим емітером, оновлюється (етап 6A), та
6C) для кожного інтерферуючого емітера,
згортка первісного sint або трансформованого sintm,l інтерферуючого сигналу здійснюється фільтром поширення gint, який є пов’язаним з ним, сигнал, отриманий в результаті цієї операції, віднімається від загального прийнятого сигналу,
6D) дрейфи частоти та часу компенсуються
- або на сигналі, отриманому в результаті xm((k+l)Te) після попередніх операцій, з метою створення сигналу x’m((k+l)Te), і в цьому разі s залишається незмінним (s’=s)
- або на опорному сигналі, який використовується згідно зі способом, s за п. (1), який, таким чином, стає s’, sm,l за п. (2), який, таким чином, стає sm,l’
6E) виконання етапів за п. 1 в x’m та s’
6F) виконання етапів за п. 2 в x’m та sm,l’.
7. Спосіб за будь-яким з пп. 1, 2 та 5, який відрізняється тим, що застосовується вектор спостереження ![]() , який складається з вектора спостереження та його спряженого комплексу, і етапи за пп. 1 або 2 втілюються з
, який складається з вектора спостереження та його спряженого комплексу, і етапи за пп. 1 або 2 втілюються з ![]() m((k+l)Te) замість xm((k+l)Te).
m((k+l)Te) замість xm((k+l)Te).
8. Спосіб за п. 7, який відрізняється тим, що також є доступним контрольне значення лише загального шуму, і етапи за пп. 1 та 2 втілюються шляхом використання оцінної розширеної матриці лише загального шуму, ![]() отриманої через контрольні зразки лише шуму, замість оцінного значення розширеної матриці кореляції спостережень,
отриманої через контрольні зразки лише шуму, замість оцінного значення розширеної матриці кореляції спостережень, ![]() де
де ![]()
![]()
9. Спосіб за будь-яким з пп. 1, 2, 3, 4 та 8, який відрізняється тим, що надіслані сигнали є квазіпрямолінійними після деротації, і перешкоди є некруговими, або канали поширення поширюються у часі, причому використовують просторово-часові вектори, які є деротованими для квазіпрямолінійних модуляцій або недеротованими для прямолінійних модуляцій з L часовими показниками ![]() dm,st((k+l)Te)
dm,st((k+l)Te)![]() [
[![]() dm((k+(L-1)/2)Te)T,…,
dm((k+(L-1)/2)Te)T,…, ![]() dm((k - (L-1)/2)Te)T]T, якщо L є непарним числом, і
dm((k - (L-1)/2)Te)T]T, якщо L є непарним числом, і ![]() dm,st((k+l)Te)
dm,st((k+l)Te)![]() [
[![]() dm((k + L/2)Te)T,…,
dm((k + L/2)Te)T,…, ![]() dm((k - L/2)Te)T]T якщо L є парним числом, де
dm((k - L/2)Te)T]T якщо L є парним числом, де ![]() dm((k+l)Te)
dm((k+l)Te)![]() [xdm((k+l)Te)T, xdm((k+l)Te)†]T, xdm((k+l)Te)
[xdm((k+l)Te)T, xdm((k+l)Te)†]T, xdm((k+l)Te) ![]() [xd((k+l)Te) exp[-j2pm(k+l)/K], xd(t)
[xd((k+l)Te) exp[-j2pm(k+l)/K], xd(t) ![]() j- t/Tx(t) і T є тривалістю символу.
j- t/Tx(t) і T є тривалістю символу.
10. Спосіб за будь-яким з пп. 1, 2, 3, 7 та 8, який відрізняється тим, що напрямний вектор емітера або рефлектора є відомим, і тим, що включає такі етапи
· визначення вектора ![]() xms(lTe) на основі K відомих зразків, s(kTe) на основі надісланого сигналу та K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1,
xms(lTe) на основі K відомих зразків, s(kTe) на основі надісланого сигналу та K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1,
· визначення матриці ![]() xm(lTe) на основі K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1,
xm(lTe) на основі K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[-j2pm(k+l)/K], 0 £ k £ K - 1,
· розрахунок достатньої статистики
![]() , де
, де ![]()
визначається як (9),
· розрахунок достатньої статистики
· встановлення межі виявлення для даної ймовірності хибного сигналу,
· порівняння значення статистики ![]() (l, m, s, K) з фіксованою межею виявлення і, у разі, якщо це межове значення перевищується, впорядкування виявлення рефлектора у стільнику відстані/доплерівського зсуву (l, m) та просторовому стільнику s,
(l, m, s, K) з фіксованою межею виявлення і, у разі, якщо це межове значення перевищується, впорядкування виявлення рефлектора у стільнику відстані/доплерівського зсуву (l, m) та просторовому стільнику s,
· визначення відносної затримки та відстані емітера або рефлектора на основі l,
· визначення відносного доплерівського зсуву та швидкості/кінематики емітера або рефлектора на основі m,
· вимірювання кутової позиції рефлектора на основі s.
11. Спосіб за будь-яким з пп. 1, 2, 3, 6, 7 та 8, який відрізняється тим, що наявним є контрольне значення лише загального шуму, і етапи за пп. 1, 2 або 6 втілюються з вимірюванням матриці лише загального шуму, ![]() bTm(lTe), отриманої через контрольні зразки лише шуму замість оцінного значення спостережень матриці кореляції,
bTm(lTe), отриманої через контрольні зразки лише шуму замість оцінного значення спостережень матриці кореляції, ![]() xm(lTe).
xm(lTe).
12. Спосіб за будь-яким з пп. 1, 2, 3, 6, 7 та 8, який відрізняється тим, що напрямний вектор рефлектора є відомим для прямолінійних надісланих сигналів та потенційно некругових перешкод, і включає принаймні такі етапи:
розрахунок достатньої статистики

побудову матриці
побудову статистики
встановлення межі виявлення для даної ймовірності хибного сигналу,
порівняння значення статистики ![]() nc(l, m, s, K) з межовим значенням та виявлення емітера або рефлектора у стільнику відстані/доплерівського зсуву (l, m) та просторовому стільнику s, якщо перевищується межове значення,
nc(l, m, s, K) з межовим значенням та виявлення емітера або рефлектора у стільнику відстані/доплерівського зсуву (l, m) та просторовому стільнику s, якщо перевищується межове значення,
визначення відносної затримки та відстані емітера або рефлектора на основі l,
визначення відносного доплерівського зсуву та швидкості/кінематики емітера або рефлектора на основі m,
визначення кутової позиції емітера або рефлектора на основі s.
13. Способи за будь-яким з пп. 1, 2, 3, 7, 8, 9 та 10, які відрізняються тим, що також є доступним контрольне значення лише загального шуму, і етапи за п. 12 втілюються шляхом використання оцінного значення розширеної матриці лише загального шуму, ![]() отриманого через контрольні зразки лише шуму, замість оцінного значення розширеної матриці кореляції спостережень,
отриманого через контрольні зразки лише шуму, замість оцінного значення розширеної матриці кореляції спостережень, ![]() де
де ![]() m((k+l)Te)
m((k+l)Te) ![]() [bm((k+l)Te)T, bm((k+l)Te)†]T.
[bm((k+l)Te)T, bm((k+l)Te)†]T.
14. Спосіб за будь-яким з пп. 1 – 13, який відрізняється тим, що доплеризовані і зсунуті за часом вектори спостереження xm((k+l)Te), ![]() m((k+l)Te), xm,st((k+l)Te) або
m((k+l)Te), xm,st((k+l)Te) або ![]()
![]() dm,st((k+l)Te) є відповідно заміненими на недоплеризовані (m = 0) і не зсунуті за часом (l = 0) вектори спостереження x(kTe),
dm,st((k+l)Te) є відповідно заміненими на недоплеризовані (m = 0) і не зсунуті за часом (l = 0) вектори спостереження x(kTe), ![]() (kTe), xst(kTe) або
(kTe), xst(kTe) або ![]() d,st(kTe), і контрольний сигнал s(kTe) є доплеризованим і зсунутим за часом, тобто, є заміненим на sm((k+l)Te) = s(kTe) exp[j2pm(k+l)/K].
d,st(kTe), і контрольний сигнал s(kTe) є доплеризованим і зсунутим за часом, тобто, є заміненим на sm((k+l)Te) = s(kTe) exp[j2pm(k+l)/K].
15. Спосіб за будь-яким з пп. 1 – 14, який відрізняється тим, що у разі, коли сигнали, які надсилаються від емітера, рефлектора, або перешкоди є широкосмуговими для застосовуваної антенної мережі, що відбувається тоді, коли співвідношення Be/f0 або pDBe/c перевищують кілька %, де D є розкривом мережі, Be є еквівалентною шириною смуги сигналу (вважається включеною до смуги прийому), f0 є несучою сигналу, і c є швидкістю поширення, причому втілюється один з таких варіантів втілення:
- побудова смуги прийому як кількох піддіапазонів, вузьких для мережі; виконання операцій обробки, які є предметом попередніх пп., по одному піддіапазону за раз,
- втілення просторово-часової структури прийому,
· у випадку, якщо сигнал перестає бути вузькосмуговим для мережі датчиків (pDBe/c перевищує кілька %): заміна попередніх просторових векторів xm((k+l)Te) на просторово-часові вектори з L часовими показниками: xm,st((k+l)Te) ![]() [xm((k+(L-1)/2)Te)T,…, xm((k - (L-1)/2)Te)T]T, якщо L є непарним числом та xm,st((k+l)Te)
[xm((k+(L-1)/2)Te)T,…, xm((k - (L-1)/2)Te)T]T, якщо L є непарним числом та xm,st((k+l)Te) ![]() [xdm((k + L/2)Te)T,…, xdm((k - L/2)Te)T]T , якщо L є парним числом;
[xdm((k + L/2)Te)T,…, xdm((k - L/2)Te)T]T , якщо L є парним числом;
· у випадку, коли сигнал також є широкосмуговим порівняно з несучою (Be/f0 перевищує кілька %), і у разі, коли кінематика емітера або рефлектора вимагає врахування деформацій, викликаних на опорному сигналі s: включення до попередніх операцій обробки не лише змінних затримки та доплерівського зсуву, але й додаткових змінних порядку 1, таких, як стискання затримки та стискання доплерівського зсуву за час інтеграції K, порядку 2, таких, як часові похідні попередніх змінних і т. ін., записування сигналу sl,m, який відповідає трансформації первісного сигналу s через часові змінні (позиція затримки і т. ін.), позначені як l, та змінні частоти (кінематика доплерівського зсуву і т. ін.), позначені як m, і з використанням сигналу sl,m для втілення етапів способу, заявлених в попередніх пунктах.
16. Спосіб за будь-яким з пп. 1 – 15, який відрізняється тим, що включає традиційні етапи гоніометрії (високороздільні або інші) або контрольної гоніометрії на основі припущень відстані затримки/кінематики доплерівського зсуву або припущень простору/відстані затримки/кінематики доплерівського зсуву, включаючи втілення способу традиційної або високороздільної гоніометрії:
· на основі спостережень xm((k+l)Te), ![]() m((k+l)Te), xm,st((k+l)Te) або
m((k+l)Te), xm,st((k+l)Te) або ![]() dm,st((k+l)Te) пов’язаних з енергетичною відстанню/доплерівським зсувом (l, m), або
dm,st((k+l)Te) пов’язаних з енергетичною відстанню/доплерівським зсувом (l, m), або
· на основі результатів кореляції з надісланим сигналом s(kTe) спостережень xm((k+l)Te), ![]() m((k+l)Te), xm,st((k+l)Te) або
m((k+l)Te), xm,st((k+l)Te) або ![]() dm,st((k+l)Te) з інтервалами, які у ціле число раз менше K, або
dm,st((k+l)Te) з інтервалами, які у ціле число раз менше K, або
· у випадку, якщо напрямний вектор s є відомим, після можливої просторової фільтрації спостережень, обмежених просторовим стільником s.
17. Пристрій, який дозволяє вимірювати поширення, виявляти і/або визначати місцезнаходження фіксованого або рухомого емітера або рефлектора у системі, яка включає N датчиків, які отримують сигнали від емітера або рефлектора, включаючи принаймні один засіб, придатний для виконання етапів способу за будь-яким з пп. 1 – 16.
Текст
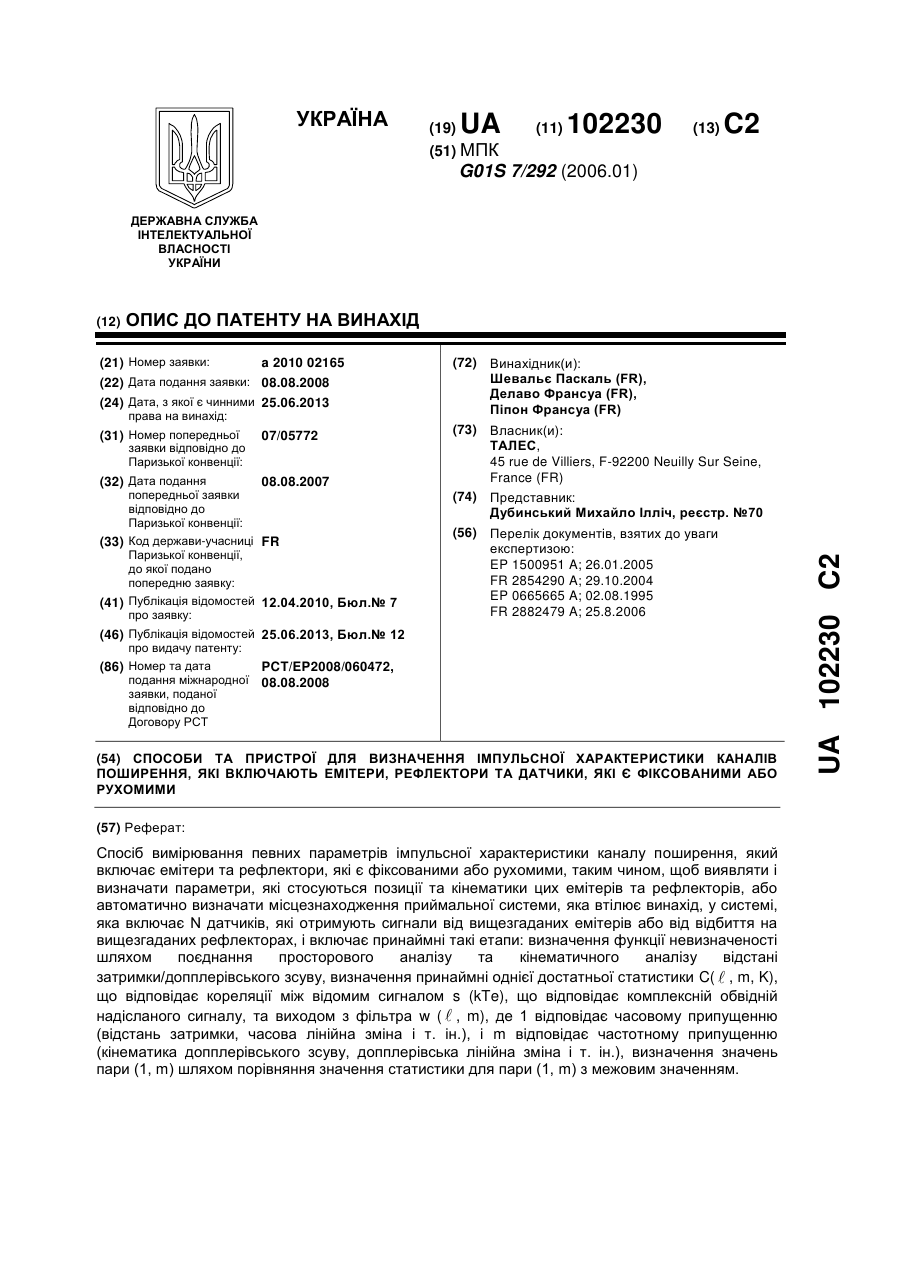
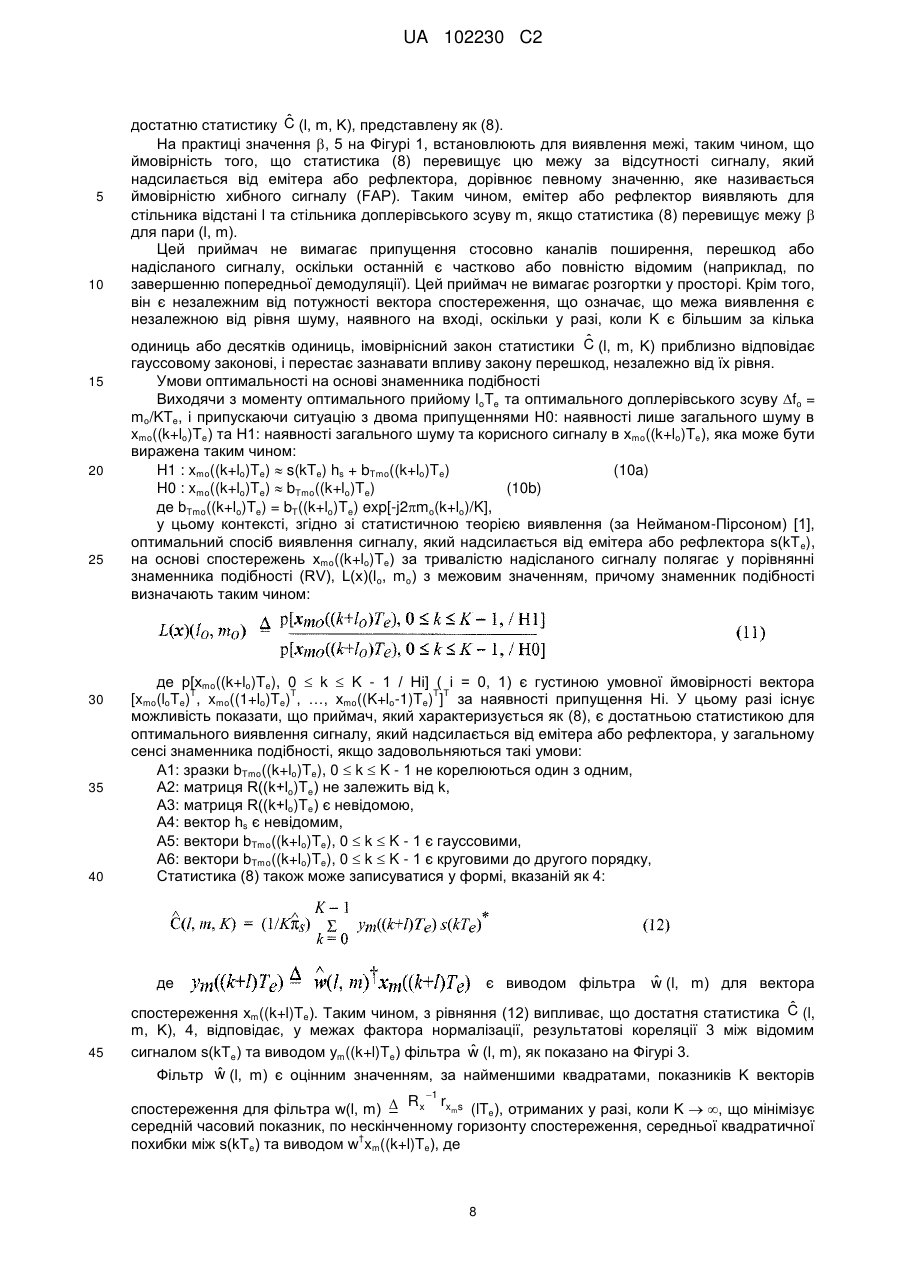
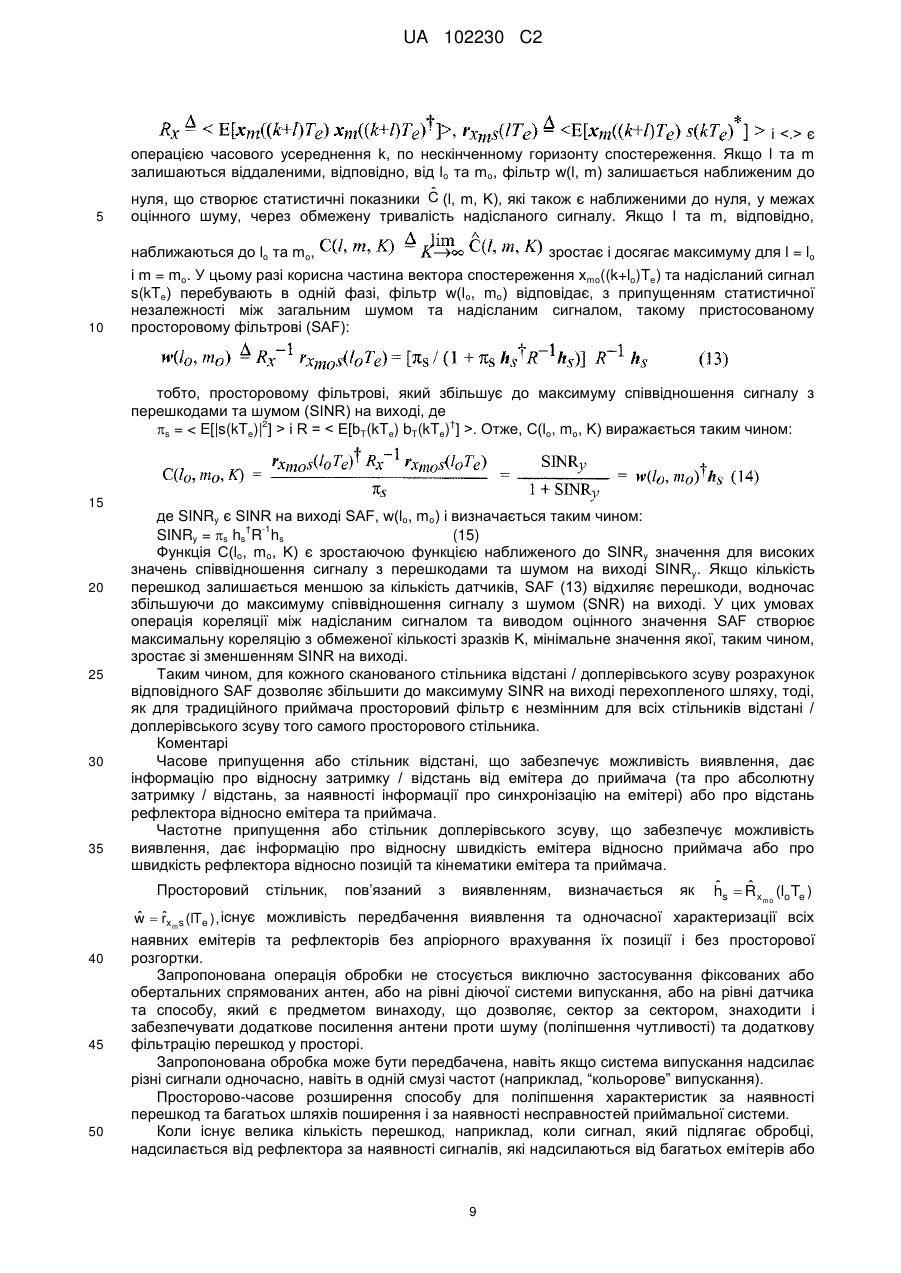
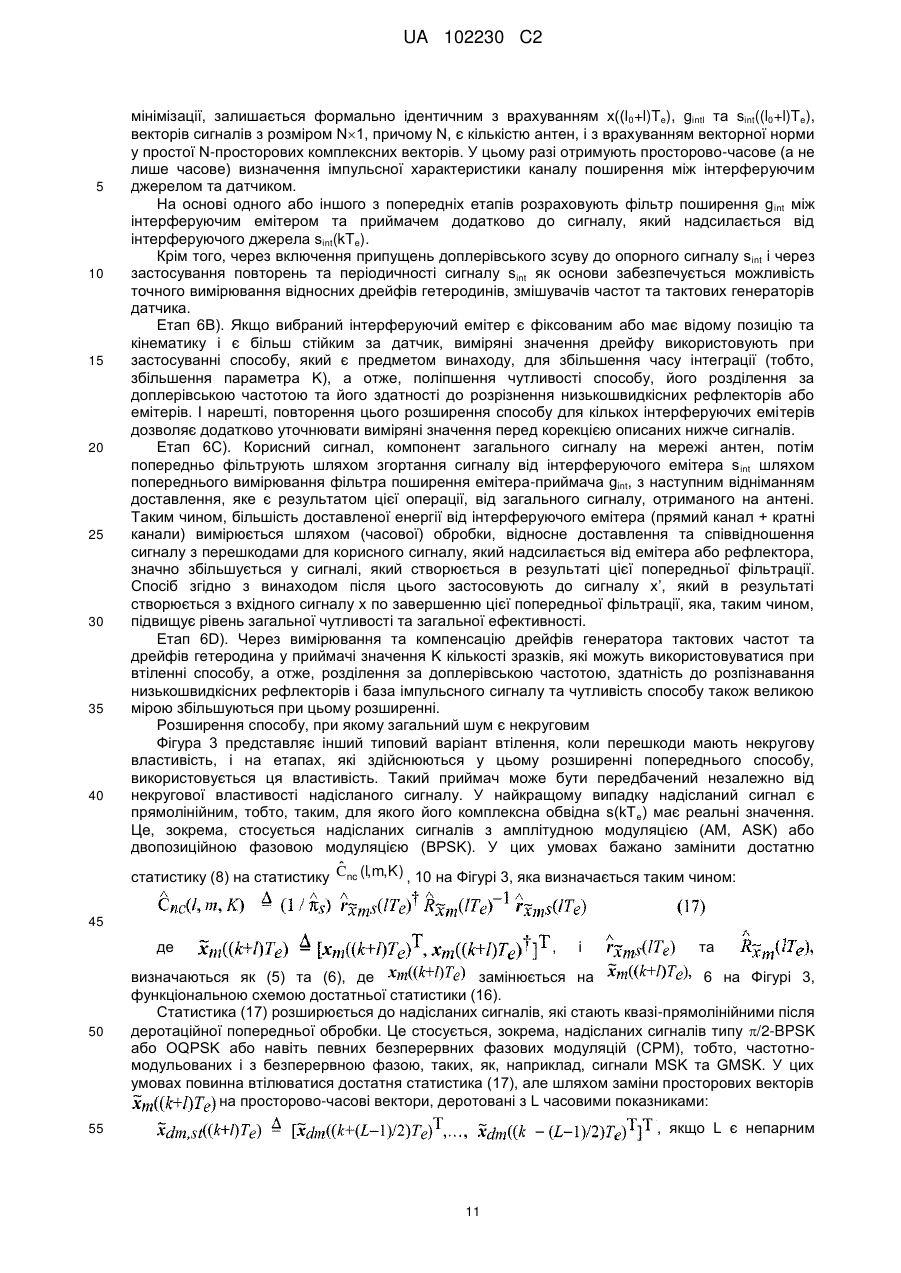
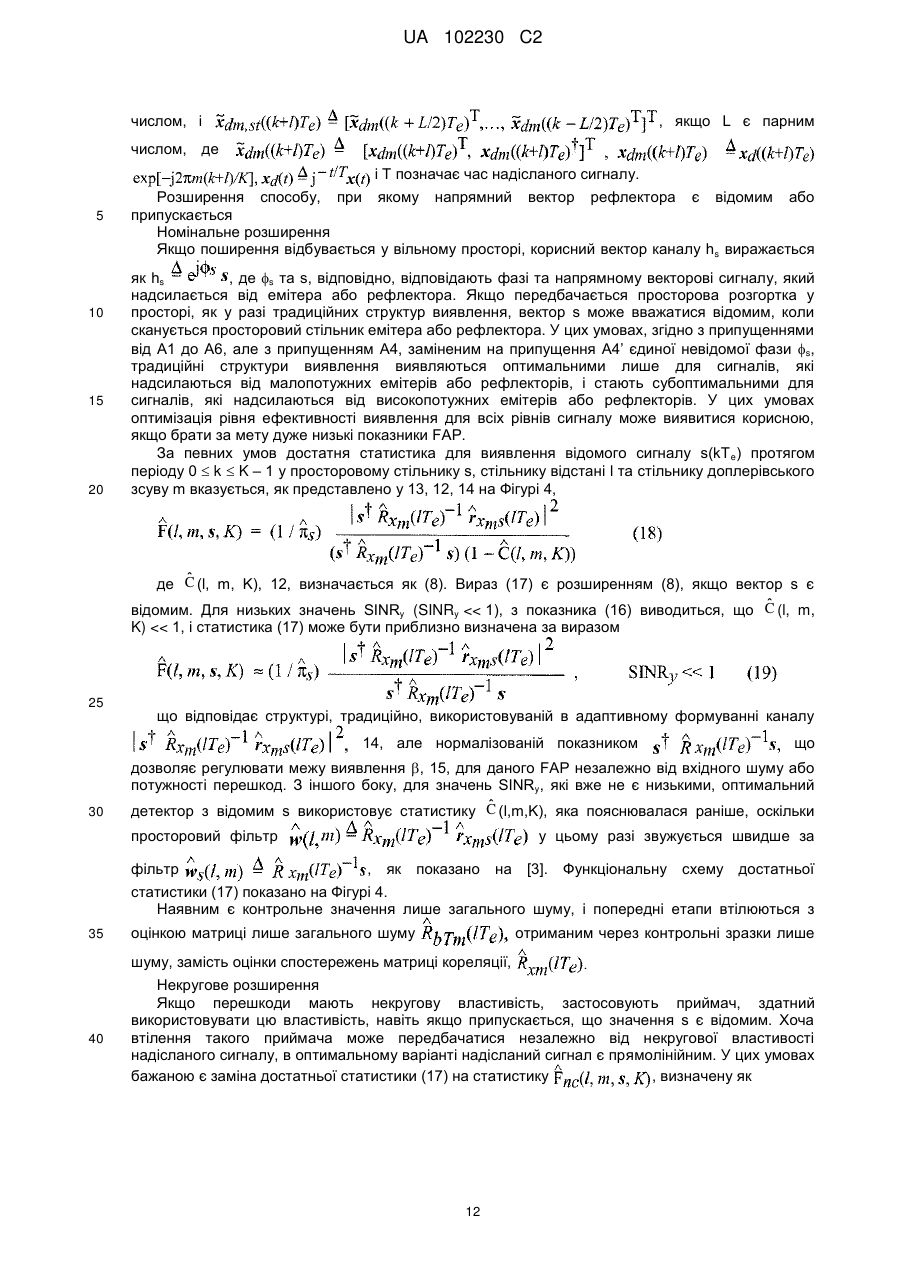
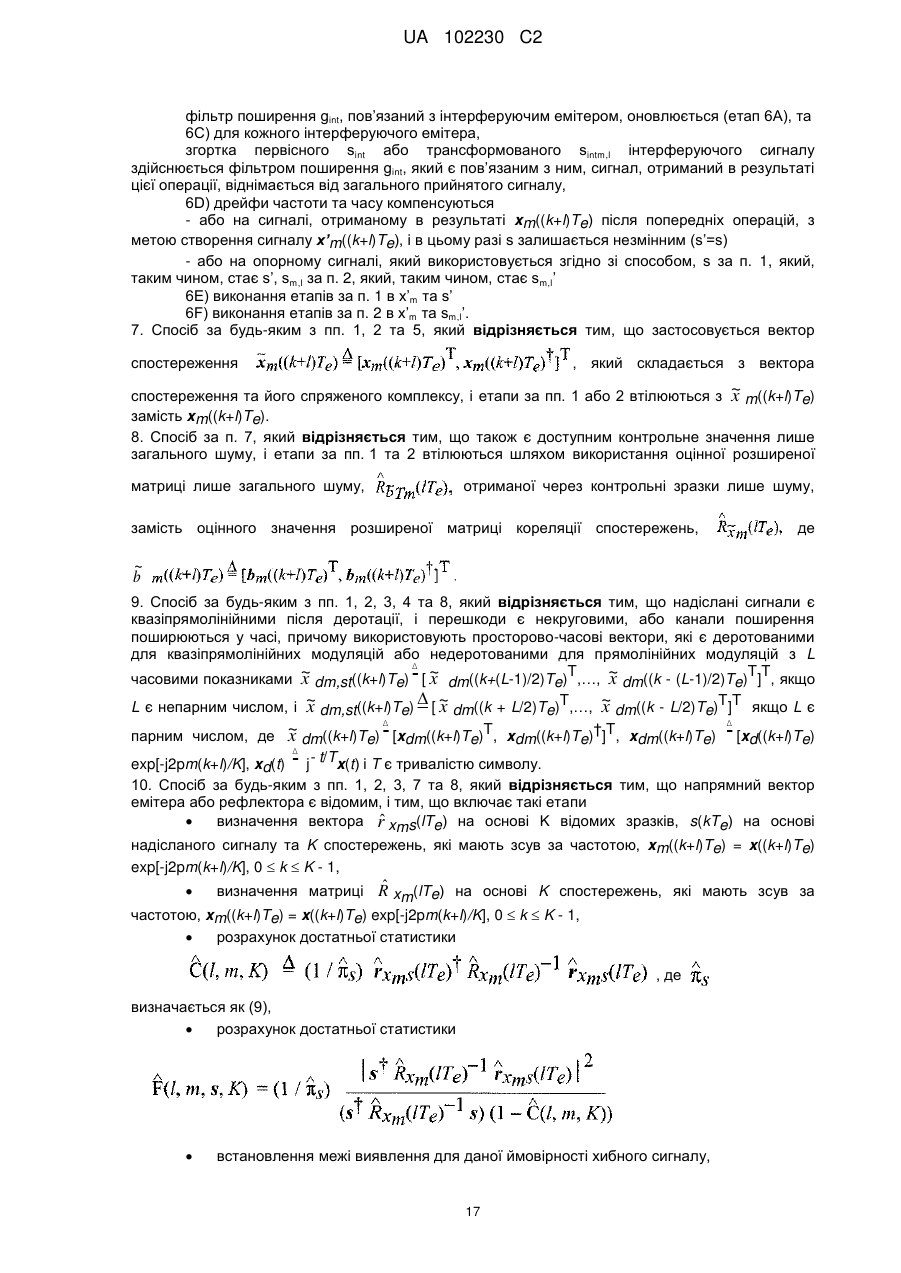
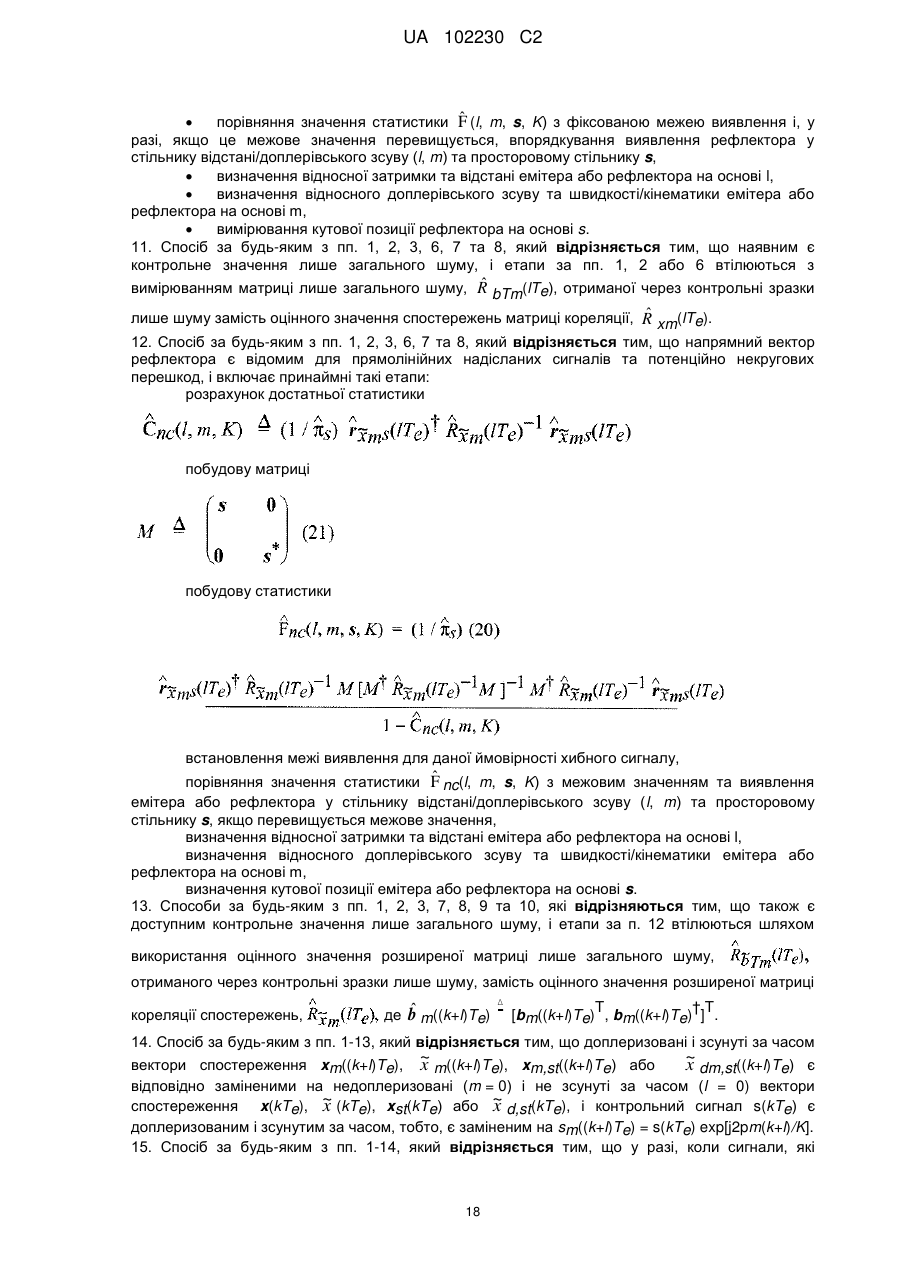
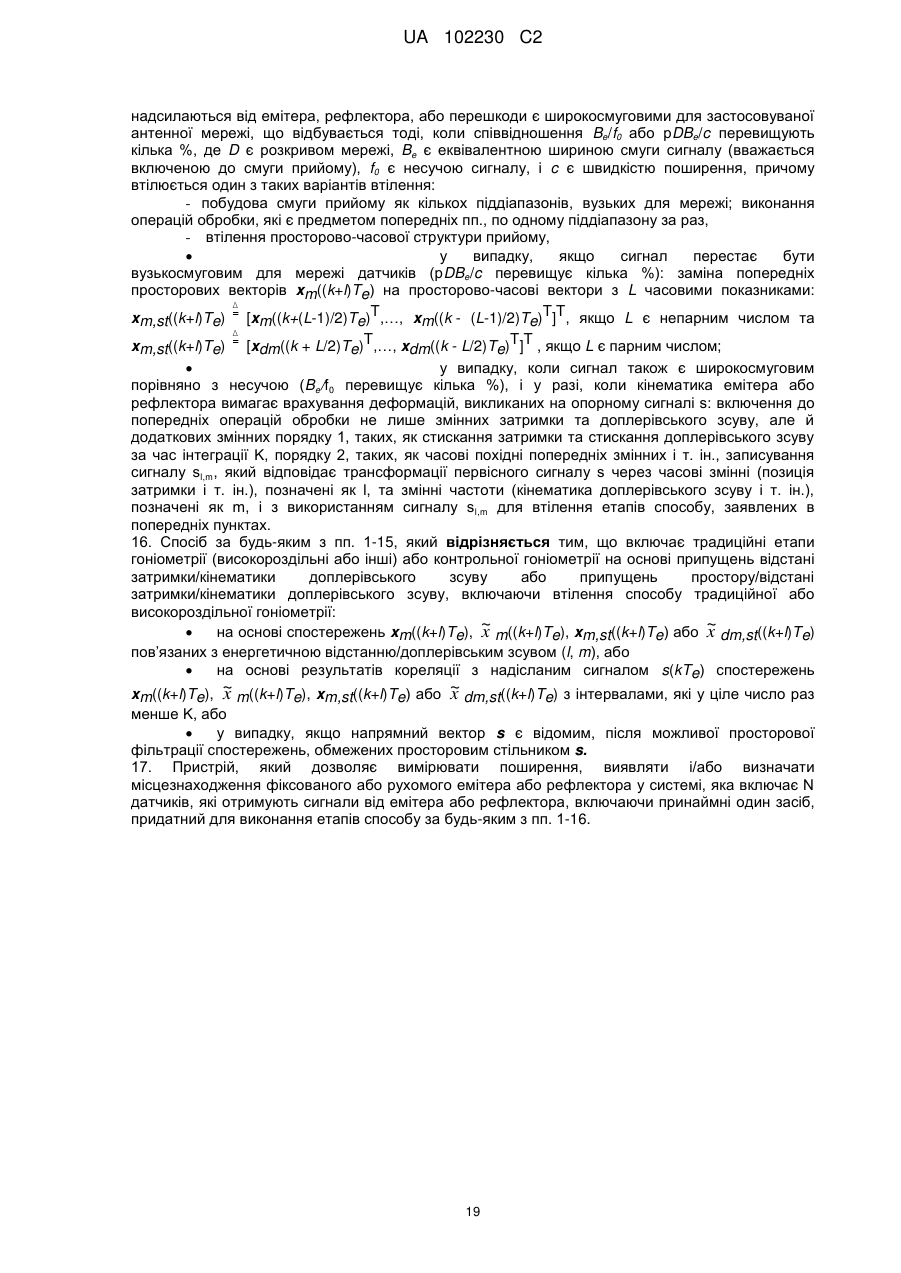
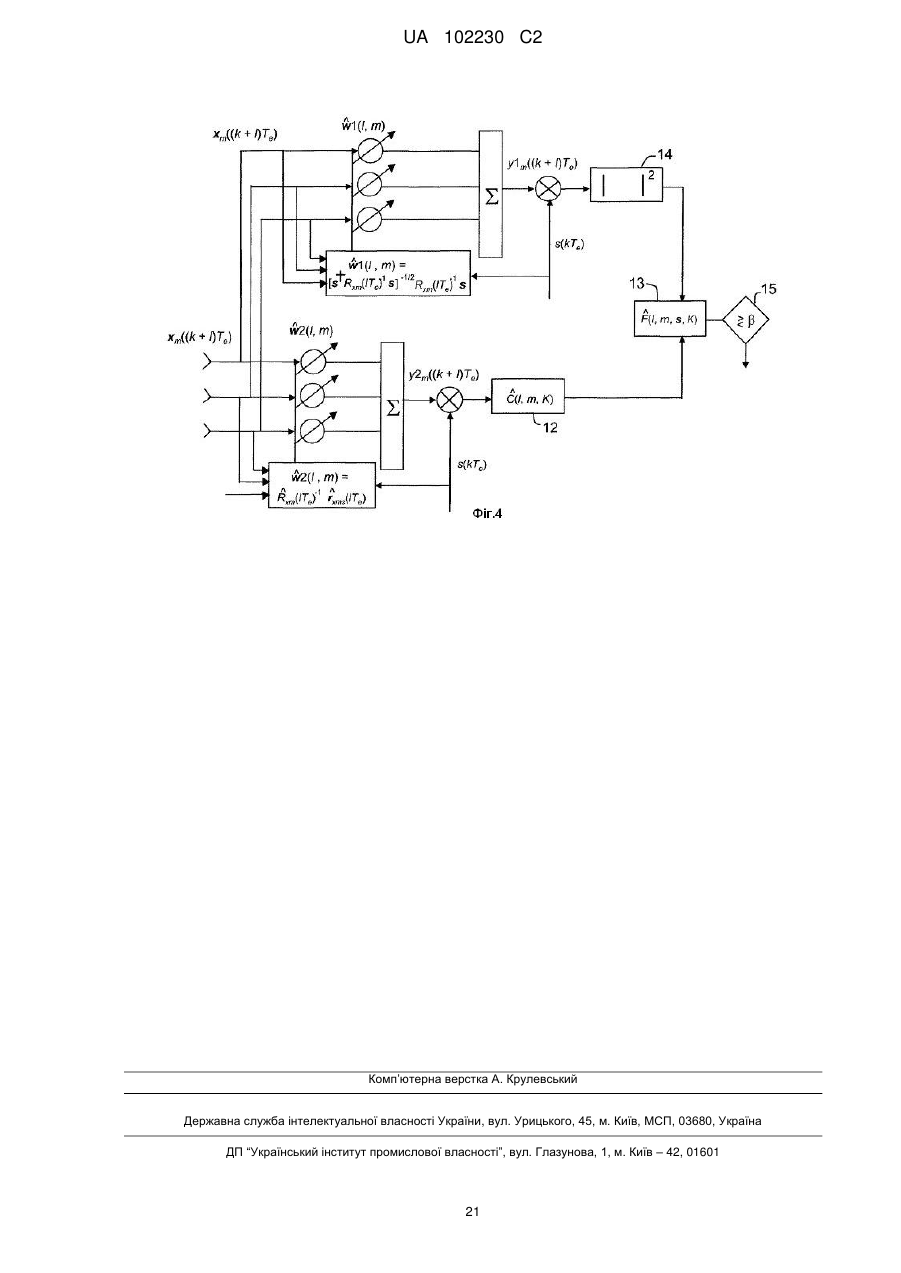
Реферат: Спосіб вимірювання певних параметрів імпульсної характеристики каналу поширення, який включає емітери та рефлектори, які є фіксованими або рухомими, таким чином, щоб виявляти і визначати параметри, які стосуються позиції та кінематики цих емітерів та рефлекторів, або автоматично визначати місцезнаходження приймальної системи, яка втілює винахід, у системі, яка включає N датчиків, які отримують сигнали від вищезгаданих емітерів або від відбиття на вищезгаданих рефлекторах, і включає принаймні такі етапи: визначення функції невизначеності шляхом поєднання просторового аналізу та кінематичного аналізу відстані затримки/допплерівського зсуву, визначення принаймні однієї достатньої статистики C( , m, K), що відповідає кореляції між відомим сигналом s (kTe), що відповідає комплексній обвідній надісланого сигналу, та виходом з фільтра w ( , m), де 1 відповідає часовому припущенню (відстань затримки, часова лінійна зміна і т. ін.), і m відповідає частотному припущенню (кінематика допплерівського зсуву, допплерівська лінійна зміна і т. ін.), визначення значень пари (1, m) шляхом порівняння значення статистики для пари (1, m) з межовим значенням. UA 102230 C2 (12) UA 102230 C2 UA 102230 C2 5 10 15 20 25 30 35 40 45 50 55 Даний винахід стосується способу забезпечення можливості оцінки певних параметрів імпульсної характеристики каналу поширення електромагнітних або акустичних хвиль, якщо останній включає емітери, датчики та рефлектори, які є фіксованими або рухомими, за допомогою комбінованої функції невизначеності простору / відстані затримки / кінематики доплерівського зсуву для виявлення та визначення позиції та кінематичних параметрів емітерів та рефлекторів. Він застосовується у багатьох галузях електромагнетизму та акустики при виявленні, передачі, визначенні місця, навігації з метою поліпшення відомостей про середовище поширення, а отже, поліпшення обробки корисних сигналів, керування радіозв’язком та широкомовними радіомережами, керування повітряним рухом, берегового контролю і т. ін. Він може бути застосований для самолокалізації приймальної системи, яка є втіленням винаходу. Його застосовують, наприклад, для емітерів, рефлекторів та датчиків, які є фіксованими або рухомими, в електромагнетизмі та акустиці. Вимірювальні системи поширення, зондування, виявлення та визначення місця традиційних електромагнітних або акустичних рефлекторів у більшості випадків є активними, і в них зазвичай застосовуються: - механічна розгортка зі спрямованою антеною (наприклад, дзеркальним рефлектором) або електронна розгортка з променем, утвореним з множиною фазо- та амплітудно-зважених датчиків, і - для кожної позиції наведення (або просторового стільника) променя: - випускання відомих сигналів, які можуть бути безперервними, пульсуючими або у формі відомих послідовностей імпульсів, - розрахунок функції невизначеності відстані / швидкості на основі, у разі сигналів у вузькій смузі, кореляції з надісланими сигналами сигналів, які спостерігаються на виводі антени, та зсуву у часі та частоті, і на основі, у разі сигналів у широкій смузі, кореляції з надісланими сигналами сигналів, які спостерігаються на виводі антени, які є затриманими, мають зсув у частоті, є стиснутими у часі та частоті, - для кожного стільника відстані / доплерівського зсуву: - встановлення межі для даної ймовірності хибного сигналу, - порівняння функції невизначеності з межовим значенням. Головною особливістю цієї операції є розв’язка між просторовим аналізом (розгорткою променя) та аналізом відстані / швидкості або затримки / доплерівського зсуву. Ця розв’язка викликає потребу в систематичному виконанні аналізу відстані / швидкості для кожної позиції променя, незалежно від того, чи є емітери або рефлектори у промені. Крім того, наведення променя передбачає поширення у вільному просторі (без кратних каналів) і вимагає для електронної розгортки контролю конфігурації антени (модель випромінюючих елементів та мережі, градуювання матриці датчиків і т. ін.). Крім того, для даного стільника простору / відстані / доплерівського зсуву регулювання межового значення вимагає попереднього визначення рівня шуму на основі спостереження стільників простору / відстані / доплерівського зсуву без рефлекторів, що потребує великих зусиль та витрат з точки зору розрахунків. Крім того, за наявності перешкоди технології усунення перешкоди шляхом просторової фільтрації мають бути передбачені при прийомі для кожної позиції розгорнутого променя, яка, таким чином, стає перешкодостійкою і здатною протидіяти перешкодам. Однак, оскільки розгорнутий промінь має певну кутову ширину, обернено пропорційну розкриву антени або мережі (на основі кількості значень довжини хвилі), пригнічення перешкод для даного просторового стільника може супроводжуватися пригніченням відбитих сигналів луни, присутніх у цьому стільнику. Тому технології підвищення надійності, що запобігає пригніченню рефлекторів, які підлягають вимірюванню, повинні бути включені до операцій обробки за рахунок можливої втрати ефективності пригнічення перешкод та підвищеної складності виконання. Проблема з вимірюванням поширення або з електромагнітним або акустичним виявленням включає виявлення наявності надісланого сигналу s(kT e) за певний період 0 k K-1 та визначення вектора каналу hs (яке стосується прийому з багатьма датчиками і відповідає напрямному векторові позиції рефлектора або емітера для поширення у вільному просторі), затримки loTe (взятої для спрощення як кратне число періоду дискретизації, але ця умова не є обов’язковою або обмежувальною) та доплерівського зсуву fo = mo/KTe (розділення за частотою становить 1/KTe, для спрощення припускається, що доплерівський зсув є кратним числом цього розділення) на основі відомого значення надісланого сигналу і на основі 1 UA 102230 C2 5 10 15 20 25 30 35 40 45 50 55 спостереження варіантів зі зсувом частоти та з перетворенням частоти векторів x(kT e) сигналів, прийнятих на датчику. У разі традиційного вимірювання поширення або виявлення в електромагнетизмі або в j e s s, і акустиці традиційні приймачі передбачають поширення у вільному просторі, тобто, h s сканують простір, напрямок за напрямком або вектор s за вектором s, з розділенням, яке відповідає ширині пелюстки (зазвичай ширині пелюстки “при 3 дБ”) променя, утвореного застосовуваною мережею, де hs є вектором імпульсних характеристик каналів, пов’язаних з напрямком рефлектора, і s та s, відповідно, відповідають фазі та напрямному векторові емітера або рефлектора. Це визначає вищезгадану концепцію просторового стільника, який зазвичай застосовується спеціалістами у даній галузі. Крім того, затримка l oTe визначається з розділенням, яке дорівнює 1/Be, що зазвичай залежить (як правило, є пропорційним) від оберненого значення еквівалентної частоти, Be, надісланого сигналу, і це обернене значення також визначає розділення за відстанню. Це визначає концепцію вищезгаданого стільника відстані, який зазвичай застосовується спеціалістами у даній галузі. І нарешті, розділення визначення доплерівського зсуву залежить (як правило, є пропорційним) від оберненого значення окремого часу спостереження, тобто, від оберненого значення тривалості KT e надісланого сигналу. Це визначає концепцію вищезгаданого доплерівського стільника, який зазвичай застосовується спеціалістами у даній галузі. Існуючий рівень техніки визначає різні приймальні структури. Як правило, приймальна структура оптимального детектора залежить від інформації, наявної апріорі у каналах поширення сигналів, які виходять з емітерів та рефлекторів, які мають виявлятися, і від загального шуму, який включає термічний шум приймачів та потенційні перешкоди [1]. Традиційні приймачі, які застосовують при електромагнітному [2] або акустичному [4] виявленні і які сканують простір шляхом електронного або механічного розгортання променя і здійснюють просторовий аналіз перед аналізом відстані / доплерівського зсуву і окремо від нього, в цілому, прямо або непрямо, для кожної позиції променя і кожного просканованого стільника відстані / доплерівського зсуву передбачають: - поширення у вільному просторі, - відомий сканований напрямок, - загальний гауссів шум, круговий та невідомий, - сигнали, які надсилаються від емітерів або від рефлекторів, які є слабкими відносно фонової перешкоди, - невідомі фазні сигнали, які надсилаються від емітерів або від рефлекторів. Ці приймачі є оптимальними лише за цих умов. Мета винаходу полягає у заміні вищезазначених традиційних структур на приймальну структуру, яка дозволяє подолати принаймні вищезгадані недоліки системи. Зокрема, вона полягає у здійсненні поєднання просторового аналізу та аналізу відстані затримки / кінематики доплерівського зсуву у комбінованому процесі. Він поєднує / комбінує обробку просторових змінних відстані затримки. Зокрема, спосіб згідно з винаходом дозволяє визначати параметри імпульсної характеристики. Цими параметрами є, наприклад, параметри, які стосуються просторової, часової та частотної структури радіоелектричного поля (розподіл кутів приходу, кутова, часова та доплерівська дифузія і т. ін.). Ці параметри також можуть бути характерними для дифузії через перешкоди на землі, у просторі і т. ін., або навіть кінематичними параметрами розсіювачів. Винахід стосується способу виявлення та/або визначення розташування емітерів та рефлекторів, які є фіксованими або рухомими, у системі, яка включає N датчиків, що приймають сигнали, які надсилаються від вищезгаданих емітерів або рефлекторів, які є фіксованими або рухомими, причому спосіб характеризується тим, що включає принаймні такі етапи: - визначення функції невизначеності шляхом поєднання просторового аналізу та аналізу відстані затримки / кінематики доплерівського зсуву, ˆ - визначення принаймні однієї достатньої статистики C (l, m, K), що відповідає кореляції між відомим сигналом s(kTe), що відповідає комплексній обвідній надісланого сигналу, та виходом з фільтра w(l,m), де l означає припущення часу / відстані затримки, і m означає припущення частоти / кінематики доплерівського зсуву, визначаючи значення параметрів припущення (l, m) шляхом порівняння значення статистики для параметрів припущення (l, m) з межовим значенням. Доплерівський / кінематичний параметр вказує m як показник змінних. Слід зазначити, що ˆ вищенаведені позначення для статистики C (l, m, K), для сигналу s(kTe) та фільтра w(l,m) є представленими у формальному сенсі: для повної універсальності кожен з параметрів l, k та m може представляти кілька змінних, пов’язаних з позицією та кінематикою емітера, рефлектора і 2 UA 102230 C2 5 10 15 20 25 30 35 40 45 50 55 навіть датчика, якщо він сам є рухомим. Однак для сигналу у вузькій смузі та часу когерентного накопичення процесу, який є достатньо малим для гарантування зміни позиції та кінематики емітера, рефлектора та датчика, який є зменшеним, візьмемо спрощені випадки, описані вище: часове припущення 1 зменшується до припущення, яке стосується значення затримки, а частотне припущення m зменшується до припущення, яке стосується значення доплерівського зсуву, що, відповідно, відповідає кратності (цілої або дробової) описаних вище значень розділення. Для гарантування ефективності способу у найбільш складних випадках, наприклад, коли кінематика датчика, емітера або рефлектора, викликає нестаціонарність параметрів затримки або доплерівського зсуву під час когерентного накопичення сигналів при виконанні (нестаціонарність, пов’язана, наприклад, з високою швидкістю), визначення 1 враховує не лише затримку сигналу, який надсилається від рефлектора, але й параметри першого порядку, такі, як відносна часова лінійна змінна сигналу, який надсилається від рефлектора (або похідну затримки за час інтеграції, яка, у свою чергу, залежить від часової обвідної сигналу та від параметризації операції обробки, яка є предметом винаходу), не лише доплерівський зсув m сигналу, який надсилається від рефлектора, але й параметри першого порядку, такі, як доплерівську лінійну змінну сигналу, який надсилається від рефлектора (або похідну доплерівського зсуву за час інтеграції, який, у свою чергу, обмежується спектральною обвідною сигнал у та параметризацією операції обробки, яка є предметом винаходу). У ще складніших випадках існує можливість використання відносних кутових, часових та доплерівських параметрів другого порядку та будь-якого іншого типу моделювання змінних кінематики емітера, рефлектора або датчика. У випадках, коли часові параметри, позначені як l, обмежуються затримкою або відстанню, і параметри кінематики, позначені як m, обмежуються доплерівським зсувом або відносною швидкістю, спосіб включає принаймні такі етапи: Для кожного припущення затримки l та кожного припущення доплерівського зсуву m: ˆ - визначення вектора r xms(lTe) (5) на основі K відомих зразків, s(kT e), надісланого сигналу та K спостережень, які мають зсув за частотою, ˆ - визначення матриці R xm(lTe) на основі K спостережень, які мають зсув за частотою, xm((k+l)Te) = x((k+l)Te) exp[ j2m(k+l)/K], 0 k K - 1 - розрахунок достатньої статистики , де - є визначеним за найменшими квадратами середньої потужності відомого сигналу, - встановлення межі виявлення для даної ймовірності хибного сигналу ˆ - порівняння статистики C (l, m, K) з незмінним межовим значенням і впорядкування виявлення емітера або рефлектора у стільнику відстані / доплерівського зсуву (l, m), якщо перевищується межове значення - визначення відносної затримки та відстані емітера або рефлектора на основі l - визначення відносного доплерівського зсуву та швидкості емітера або рефлектора на основі m - визначення просторового стільника емітера або рефлектора на основі напрямного вектора ˆ h s на антені сигналу, який надсилається від емітера або рефлектора, взятого як ˆ ˆ hs rxms (lTe ). У більш складних випадках спосіб включає, наприклад, такі етапи: 3A) часові параметри включають у визначення, такі, як затримки-позиції, позначені як l, у визначення параметрів частоти, таких, як кінематика доплерівського зсуву, позначених як m, і у визначення відомого сигналу s у кожному припущенні l та m, змінні та трансформації сигналу, викликані переміщеннями емітера, приймача або рефлектора і коливаннями каналу поширення, залежно від припущення затримки-позиції, припущення відносної швидкості доплерівського зсуву, часу інтеграції обробки, еквівалентної ширини смуги сигналу, еквівалентної тривалості сигналу та його періодичності, якщо він є пульсуючим під час інтеграції обробки, від коливання затримки за цей час, від коливання доплерівського зсуву за цей час, 3B) сигнал sl,m, отриманий від трансформації s, використовують згідно з часовими припущеннями, позначеними як l, та частотними припущеннями, позначеними як m. Для виявлення емітера або рефлектора, сигнал яких піддається сильним перешкодам, спосіб передбачає використання сигналу x’ m((k+l)Te) та опорного сигналу s’ замість вхідного 3 UA 102230 C2 5 сигналу xm((k+l)Te та первісного опорного сигналу s, сигнал x’m((k+l)Te)) отримують від сигналу xm((k+l)Te), і опорний сигнал s’ отримують від первісного опорного сигналу s або від трансформованого опорного сигналу sl,m за допомогою операцій, які включають посилення фільтрів простору-часу, наприклад, таким чином: 6A) для кожного інтерферуючого емітера: визначення імпульсної характеристики gint поширення фільтра від емітера до приймача шляхом мінімізації критерію , T 10 15 20 25 30 сигнал » " Sint=(sint((l0+l)Te), sint((l0+l+1)Te),...,sint((l0+l+L-1)Te)) або Sint,m,l =(sintm,l ((l0+l)Te), » » T sintm,l ((l0+l+1)Te),...,sintm,l ((l0+l+L-1)Te)) отримують або на основі загального апріорного знання первісного інтерферуючого сигналу, або на основі часткового апріорного знання первісного інтерферуючого сигналу, або шляхом демодуляції / вирівнювання первісного інтерферуючого сигналу у будь-який спосіб, відомий спеціалістам у даній галузі, і піддають можливій трансформації до Sint,m,l 6B) для одного або кількох інтерферуючих емітерів, які є фіксованими або мають відому кінематику і вибираються згідно з їхньою частотою та стійкістю у часі, різні частотні припущення включають в опорний сигнал Sint , і повтори, присутні в опорному сигналі, використовують для точного визначення, на великій довжині інтеграції K, відхилень частоти та часу відносно інтерферуючого емітера, дрейфи відносно інтерферуючого емітера визначають для місцевих гетеродинів мікшерів та тактових генераторів системи для приймання та дискретизації сигналів, які використовують для втілення винаходу. Під час етапу 6B спосіб включає, наприклад, такі етапи: фільтр поширення gint, пов’язаний з інтерферуючим емітером, оновлюється (етап 6A), і 6C) для кожного інтерферуючого емітера згортка первісного sint або трансформованого sintm,l інтерферуючого сигналу здійснюється фільтром поширення gint, який є пов’язаним з ним, сигнал, отриманий в результаті цієї операції, віднімається від загального прийнятого сигналу, 6D) дрейфи частоти та часу компенсуються - або на сигналі, отриманому в результаті x m((k+l)Te) після попередніх операцій, з метою створення сигналу x’m((k+l)Te), і в цьому разі s залишається незмінним (s’=s) - або на опорному сигналі, який використовується згідно зі способом, і, таким чином, s може стати s’, sm,l може стати sm,l’ 6E) виконання вищезгаданих етапів при x’m та s’ 6F) виконання вищезгаданих етапів при x’m та sm,l’. T T x Використовують вектор спостереження ~ ((k+l)T ) [x ((k+l)T ) , x ((k+l)T )†] який , m 35 опорний e m e m e складається, наприклад, з вектора спостереження та його спряженого комплексу, і в якому x вищезгадані етапи втілюються з ~ m((k+l)Te) замість xm((k+l)Te). Також є доступним, наприклад, контрольне значення лише загального шуму, і вищезгадані етапи здійснюють з використанням оцінного значення розширеної матриці лише загального шуму, отриманої через контрольні зразки лише шуму, замість оцінного значення матриці кореляції спостережень, розширеної 45 Оскільки напрямний вектор рефлектора є відомим для прямолінійних надісланих сигналів і потенційно некругових перешкод, спосіб характеризується тим, що включає принаймні такі етапи: розрахунок достатньої статистики побудову матриці 4 у якій 40 UA 102230 C2 побудову статистики 5 10 15 20 25 30 35 40 45 встановлення межі виявлення для даної ймовірності хибного сигналу, ˆ порівняння значення статистики F nc(l, m, s, K) з межовим значенням та виявлення емітера або рефлектора у стільнику відстані / доплерівського зсуву (l, m) та просторовому стільнику s, якщо перевищується межове значення, визначення відносної затримки та відстані емітера або рефлектора на основі l, визначення відносного доплерівського зсуву та швидкості / кінематики емітера або рефлектора на основі m, визначення кутової позиції емітера або рефлектора на основі s. Винахід також стосується пристрою, який включає засіб, такий, як процесор, придатний для виконання етапів способу згідно з винаходом. Поєднання простору / відстані затримки / кінематики доплерівського зсуву, яке є предметом винаходу, зокрема, дозволяє прямо визначати позиції емітерів та рефлекторів без необхідності розгортки в усьому просторі, а отже, без необхідності у скануванні напрямків, які не мають емітерів та рефлекторів. Це дозволяє послабити зусилля, спрямовані на контроль конфігурації мережі датчиків (наприклад, у разі поєднання між випромінюючими елементами відпадає необхідність у градуюванні) і є ідеально придатним для поширення через багато каналів. І нарешті, це розумне поєднання дозволяє не лише встановлювати межу, яка є незалежною від рівня шуму, наявного на вході але й для внутрішнього захисту від перешкод без ризику відмови сигналів, які використовуються для вимірювання, і без необхідності у включенні операцій обробки для підвищення надійності. Інші переваги та особливості винаходу стануть більш очевидними по ознайомленню з представленим нижче описом спрощеного типового варіанта втілення, який є пояснювальним, але не обмежувальним, з супровідними фігурами, серед яких: - Фігура 1 є функціональною схемою функції невизначеності простору / відстані затримки / кінематики доплерівського зсуву згідно з винаходом, причому параметри кінематики доплерівського зсуву у цьому необмежувальному спрощеному прикладі є скороченими до параметра доплерівського зсуву, прямо пов’язаного з відносною швидкістю емітера або рефлектора. - Фігура 2 є типовим варіантом втілення способу з врахуванням перешкод, - Фігура 3 є функціональною схемою некругового розширення функції невизначеності простору / відстані затримки / кінематики доплерівського зсуву, причому параметри кінематики доплерівського зсуву у цьому необмежувальному спрощеному прикладі є скороченими до параметра доплерівського зсуву, прямо пов’язаного з відносною швидкістю емітера або рефлектора, і - Фігура 4 є функціональною схемою функції невизначеності простору / відстані затримки / кінематики доплерівського зсуву, коли s є відомим, причому параметри кінематики доплерівського зсуву у цьому необмежувальному спрощеному прикладі є скороченими до параметра доплерівського зсуву, прямо пов’язаного з відносною швидкістю емітера або рефлектора. Розглядається антена, яка має N цифрових датчиків вузької смуги (NB) Ci, які отримують доставлений від емітера або рефлектора безперервний, пульсуючий або повторюваний пульсуючий сигнал, надісланий від системи електромагнітного або акустичного випускання з відомими можливостями (необмежувальні приклади: передавач системи зв’язку, який попередньо був демодульований, або певна частина сигналів якого є апріорі відомою - слова та 5 UA 102230 C2 5 10 15 20 коди синхронізації - передавальна частина зонда каналу і т. ін.), до якого додається загальний шум, який складається з перешкод та фонової перешкоди. При цих припущеннях вектор x(kT e) комплексних обвідних сигналів, які дискретизуються й спостерігаються на виході датчиків Ci, виражається таким чином: x(kTe) s((k-lo)Te) exp[j2mo(k-lo)/K] hs + bT(kTe) (1) де Te є періодом дискретизації цифрового датчика, s(t) є комплексною обвідною надісланого сигналу, який є відомим для приймача і має тривалість KT e, bT(kTe) є вектором дискретизованого загального шуму, який не корелюється з сигналом, надісланим від рефлектора, hs є вектором імпульсних характеристик каналів, пов’язаних з сигналом, який надходить від рефлектора, loTe є затримкою поширення сигналу, який надсилається від рефлектора, що містить, зокрема, інформацію, яка стосується відстані між рефлектором, використовуваною системою випускання та датчиком, затримкою, яка для спрощення береться як така, що дорівнює кратному значенню T e, причому припущення береться як необмежувальний приклад, fo = mo/KTe є доплерівським зсувом, викликаним рефлектором (потенційно мінливим), який для спрощення береться як такий, що дорівнює кратному значенню оберненого значення часу інтеграції операції обробки KT e, причому припущення береться як необмежувальний приклад, що містить інформацію про відносну швидкість рефлектора відносно позицій використовуваних системи випускання та датчика. Власне кажучи, модель (1) передбачає канали поширення без часового розширення, яке відбувається, наприклад, для поширення у вільному просторі (супутникові телекомунікації, повітряні радіокомунікації і т. ін.), або канали з затуханням сигналу, при якому смуга когерентності каналу є більшою за ширину смуги пропущення сигналу, і яке частіше позначається терміном “плавне затухання”, що впливає на певні ситуації радіозв’язку або виявлення у міському середовищі. Зокрема, для j поширення у вільному просторі h e s s, де та s, відповідно, відповідають фазі та s 25 30 35 40 45 50 55 s напрямному векторові сигналу, який надсилається від емітера або рефлектора. Модель (1) також передбачає, що часові та частотні параметри емітера або рефлектора обмежуються затримкою та доплерівським зсувом, і цей опис є цілком повним лише для емітерів або рефлекторів конкретної кінематики (рівномірний прямолінійний рух та обмежена швидкість відносно часу когерентного накопичення процесу). Однак спосіб також застосовується до поширених у часі каналів. У цих умовах корисна частина (1) фактично відповідає частці шляху або режиму поширення сигналу, який надсилається від емітера або рефлектора, причому інші шляхи включаються до вектора загального шуму. Крім того, як наголошувалося вище, спосіб також стосується емітерів, рефлекторів або датчиків, які мають кінематику, яка є складнішою за прямолінійних рух, який є рівномірним і має обмежену швидкість відносно часу інтеграції процесу. У цих умовах корисна частина (1) фактично відповідає частці сигналу, що зазнає деформації, викликаної цією кінематикою, і спостереження корисного сигналу повинно розглядатися з доповненням параметрами першого порядку (порядку 1), як зазначалося вище, такими, як часова лінійна змінна та доплерівська лінійна змінна, для повідомлення про високу відносну швидкість або переміщення з обмеженим прискоренням емітера, рефлектора або датчика під час фази когерентного накопичення процесу, який є предметом винаходу, навіть параметрами другого порядку (порядку 2) для повідомлення про фази суттєвого прискорення / уповільнення емітера, рефлектора або датчика під час когерентного накопичення процесу, який є предметом винаходу; і, нарешті, моделювання деформацій сигналу s, викликаних часовим припущенням, позначеним як l, і викликаних частотним припущенням, позначеним як m, перед застосуванням способу до сигналу sl,m, отриманого у такий спосіб шляхом трансформації s. Слід зазначити, що вищезгаданий перелік параметрів не є обмежувальним, і можуть бути включені інші параметри для моделювання впливу кінематики системи випускання, датчика або рефлектора на сигнал, який надсилається від останніх. Статистика спостереження другого порядку Статистика другого порядку, яка розглядається нижче в описі, відповідає першій матриці кореляції вектора комплексних обвідних сигналів, які дискретизуються й спостерігаються на виході датчиків, x(kTe), вираженій, з урахуванням попередніх припущень, таким чином: E[x(kT ) x(kT )†] ((k-l )T ) h h † + R(kT ) Rx(kTe) (2) e e s o e s s e яка залежить від часу в цілому через потенційну нестаціонарність надісланого сигналу (цифрові модуляції, наприклад, для сигналів зв’язку...). У наведених вище виразах † E[b (kT ) b (kT )†] є першою матрицею кореляції представляє спряжене перетворення, R(kT e) T e T e E[|s(kT )|2] є сигналом миттєвої потужності, який надсилається від вектора bT(kTe), s(kTe) e 6 UA 102230 C2 5 10 емітера або рефлектора, і який має бути отриманий всеспрямованим датчиком для поширення у вільному просторі. Описані нижче різні варіанти втілення втілюються, наприклад, у приймачі, який включає кілька приймальних антен C1,…,CN, та процесор P, запрограмований на виконання різних етапів. Різні типові варіанти втілення представлено з посиланням на фігури 1, 2, 3 та 4. Зокрема, спосіб згідно з винаходом ґрунтується на визначенні функції невизначеності шляхом поєднання просторового аналізу та кінематичного аналізу відстані затримки / доплерівського зсуву у комбінованому процесі. Типові варіанти втілення винаходу Перший варіант втілення способу згідно з винаходом, показаний на Фігурі 1, полягає у визначенні припущення часу / відстані затримки l = ˆ та припущення частоти / кінематики l o 15 ˆ доплерівського зсуву m = mo , таким чином, щоб відомі зразки s(kT e), 0 k K - 1, оптимально виявлялися на основі векторів спостереження x m((k+l)Te) = x((k+l)Te) exp[-j2m(k+l)/K], 0 k K 1, якщо припустити, що R(k) та hs є невідомими, і без припущень стосовно каналів поширення та рівня сигналу, який надсилається від емітера або рефлектора. ˆ Один спосіб полягає у визначенні l = ˆo та m = mo , таким чином, щоб відомі зразки s(kTe), 0 l k K - 1, оптимально визначалися за найменшими квадратами на основі операції лінійної фільтрації спостережень xm((k+l)Te), 0 k K - 1. Іншими словами, спосіб має на меті ˆ ˆ знаходження l = lo та m = mo , для мінімізації критерію найменших квадратів 20 ˆ де w (l, m), позначений як 1 на Фігурі 1, є просторовим фільтром, який мінімізує критерій (3) і який виражається таким чином: ˆ де вектор rx s (lTe) та матриця R x (lTe) є вираженими як ˆ m m 25 ˆ При включенні (4), (5) та (6) у (3) новий вираз критерію найменших квадратів (l, m, K) є таким: 30 ˆ ˆ де C (l, m, K), позначений як 4 на Фігурі 1, таким чином, що 0 C (l, m, K) 1, є таким: ˆ і s визначається таким виразом: ˆ ˆ З (7) випливає, що lo та mo , відповідно, є параметрами l та m, які збільшують до максимуму 7 UA 102230 C2 5 10 15 20 25 30 35 40 ˆ достатню статистику C (l, m, K), представлену як (8). На практиці значення , 5 на Фігурі 1, встановлюють для виявлення межі, таким чином, що ймовірність того, що статистика (8) перевищує цю межу за відсутності сигналу, який надсилається від емітера або рефлектора, дорівнює певному значенню, яке називається ймовірністю хибного сигналу (FAP). Таким чином, емітер або рефлектор виявляють для стільника відстані l та стільника доплерівського зсуву m, якщо статистика (8) перевищує межу для пари (l, m). Цей приймач не вимагає припущення стосовно каналів поширення, перешкод або надісланого сигналу, оскільки останній є частково або повністю відомим (наприклад, по завершенню попередньої демодуляції). Цей приймач не вимагає розгортки у просторі. Крім того, він є незалежним від потужності вектора спостереження, що означає, що межа виявлення є незалежною від рівня шуму, наявного на вході, оскільки у разі, коли K є більшим за кілька ˆ одиниць або десятків одиниць, імовірнісний закон статистики C (l, m, K) приблизно відповідає гауссовому законові, і перестає зазнавати впливу закону перешкод, незалежно від їх рівня. Умови оптимальності на основі знаменника подібності Виходячи з моменту оптимального прийому loTe та оптимального доплерівського зсуву fo = mo/KTe, і припускаючи ситуацію з двома припущеннями H0: наявності лише загального шуму в xmo((k+lo)Te) та H1: наявності загального шуму та корисного сигналу в x mo((k+lo)Te), яка може бути виражена таким чином: H1 : xmo((k+lo)Te) s(kTe) hs + bTmo((k+lo)Te) (10a) H0 : xmo((k+lo)Te) bTmo((k+lo)Te) (10b) де bTmo((k+lo)Te) = bT((k+lo)Te) exp[-j2mo(k+lo)/K], у цьому контексті, згідно зі статистичною теорією виявлення (за Нейманом-Пірсоном) [1], оптимальний спосіб виявлення сигналу, який надсилається від емітера або рефлектора s(kT e), на основі спостережень xmo((k+lo)Te) за тривалістю надісланого сигналу полягає у порівнянні знаменника подібності (RV), L(x)(lo, mo) з межовим значенням, причому знаменник подібності визначають таким чином: де p[xmo((k+lo)Te), 0 k K - 1 / Hi] ( i = 0, 1) є густиною умовної ймовірності вектора T T T T [xmo(loTe) , xmo((1+lo)Te) , …, xmo((K+lo-1)Te) ] за наявності припущення Hi. У цьому разі існує можливість показати, що приймач, який характеризується як (8), є достатньою статистикою для оптимального виявлення сигналу, який надсилається від емітера або рефлектора, у загальному сенсі знаменника подібності, якщо задовольняються такі умови: A1: зразки bTmo((k+lo)Te), 0 k K - 1 не корелюються один з одним, A2: матриця R((k+lo)Te) не залежить від k, A3: матриця R((k+lo)Te) є невідомою, A4: вектор hs є невідомим, A5: вектори bTmo((k+lo)Te), 0 k K - 1 є гауссовими, A6: вектори bTmo((k+lo)Te), 0 k K - 1 є круговими до другого порядку, Статистика (8) також може записуватися у формі, вказаній як 4: де 45 є виводом фільтра ˆ w (l, m) для вектора ˆ спостереження xm((k+l)Te). Таким чином, з рівняння (12) випливає, що достатня статистика C (l, m, K), 4, відповідає, у межах фактора нормалізації, результатові кореляції 3 між відомим ˆ сигналом s(kTe) та виводом ym((k+l)Te) фільтра w (l, m), як показано на Фігурі 3. ˆ Фільтр w (l, m) є оцінним значенням, за найменшими квадратами, показників K векторів 1 R r спостереження для фільтра w(l, m) x xms (lTe), отриманих у разі, коли K , що мінімізує середній часовий показник, по нескінченному горизонту спостереження, середньої квадратичної † похибки між s(kTe) та виводом w xm((k+l)Te), де 8 UA 102230 C2 і є операцією часового усереднення k, по нескінченному горизонту спостереження. Якщо l та m залишаються віддаленими, відповідно, від lo та mo, фільтр w(l, m) залишається наближеним до ˆ нуля, що створює статистичні показники C (l, m, K), які також є наближеними до нуля, у межах 5 оцінного шуму, через обмежену тривалість надісланого сигналу. Якщо l та m, відповідно, наближаються до lo та mo, 10 зростає і досягає максимуму для l = lo і m = mo. У цьому разі корисна частина вектора спостереження x mo((k+lo)Te) та надісланий сигнал s(kTe) перебувають в одній фазі, фільтр w(lo, mo) відповідає, з припущенням статистичної незалежності між загальним шумом та надісланим сигналом, такому пристосованому просторовому фільтрові (SAF): тобто, просторовому фільтрові, який збільшує до максимуму співвідношення сигналу з перешкодами та шумом (SINR) на виході, де 2 † s = і R = . Отже, C(lo, mo, K) виражається таким чином: 15 20 25 30 35 де SINRy є SINR на виході SAF, w(lo, mo) і визначається таким чином: † -1 SINRy = s hs R hs (15) Функція C(lo, mo, K) є зростаючою функцією наближеного до SINRy значення для високих значень співвідношення сигналу з перешкодами та шумом на виході SINR y. Якщо кількість перешкод залишається меншою за кількість датчиків, SAF (13) відхиляє перешкоди, водночас збільшуючи до максимуму співвідношення сигналу з шумом (SNR) на виході. У цих умовах операція кореляції між надісланим сигналом та виводом оцінного значення SAF створює максимальну кореляцію з обмеженої кількості зразків K, мінімальне значення якої, таким чином, зростає зі зменшенням SINR на виході. Таким чином, для кожного сканованого стільника відстані / доплерівського зсуву розрахунок відповідного SAF дозволяє збільшити до максимуму SINR на виході перехопленого шляху, тоді, як для традиційного приймача просторовий фільтр є незмінним для всіх стільників відстані / доплерівського зсуву того самого просторового стільника. Коментарі Часове припущення або стільник відстані, що забезпечує можливість виявлення, дає інформацію про відносну затримку / відстань від емітера до приймача (та про абсолютну затримку / відстань, за наявності інформації про синхронізацію на емітері) або про відстань рефлектора відносно емітера та приймача. Частотне припущення або стільник доплерівського зсуву, що забезпечує можливість виявлення, дає інформацію про відносну швидкість емітера відносно приймача або про швидкість рефлектора відносно позицій та кінематики емітера та приймача. ˆ ˆ Просторовий стільник, пов’язаний з виявленням, визначається як h R (l T ) s xmo o e ˆ ˆ w rx ms (lTe ), існує можливість передбачення виявлення та одночасної характеризації всіх 40 45 50 наявних емітерів та рефлекторів без апріорного врахування їх позиції і без просторової розгортки. Запропонована операція обробки не стосується виключно застосування фіксованих або обертальних спрямованих антен, або на рівні діючої системи випускання, або на рівні датчика та способу, який є предметом винаходу, що дозволяє, сектор за сектором, знаходити і забезпечувати додаткове посилення антени проти шуму (поліпшення чутливості) та додаткову фільтрацію перешкод у просторі. Запропонована обробка може бути передбачена, навіть якщо система випускання надсилає різні сигнали одночасно, навіть в одній смузі частот (наприклад, “кольорове” випускання). Просторово-часове розширення способу для поліпшення характеристик за наявності перешкод та багатьох шляхів поширення і за наявності несправностей приймальної системи. Коли існує велика кількість перешкод, наприклад, коли сигнал, який підлягає обробці, надсилається від рефлектора за наявності сигналів, які надсилаються від багатьох емітерів або 9 UA 102230 C2 5 10 15 20 25 30 35 40 45 50 55 емітерів, пов’язаних з багатьма шляхами поширення, або коли застосовувані приймальні системи мають певну нестійкість або зниження чутливості, існує можливість збільшення кількості ступенів свободи при здійсненні способу, а отже, поліпшення його здатності до фільтрації, його здатності до розпізнавання низькошвидкісних емітерів та рефлекторів та його чутливості. На описаних вище етапах застосовують часову попередню фільтрацію загального отриманого сигналу, яка полягає, для кожного інтерферуючого емітера, у визначенні загального доставлення інтерферуючого емітера – в результаті згортки сигналу, надісланого інтерферуючим джерелом, фільтром поширення, який є пов’язаним з ним, причому цей сигнал та цей фільтр попередньо вимірюють – з наступним відніманням від сигналу, що надходить, загального доставлення, що в результаті надходить від інтерферуючого емітера. Спрощений типовий варіант втілення представлено нижче для пояснення, але не для обмеження його обсягу, з посиланням на Фігуру 2, яка представляє втілення описаного вище загального способу, пов’язаного з просторово-часовою попередньою фільтрацією, яка є предметом даного розширення. Сильні перешкоди відповідають, наприклад, перешкодам зі значенням, на 10-40 дБ вищим, ніж приймач, який піддається виявленню. Для попередньої фільтрації сигналу суттєвим є вимірювання сигналу s int(kTe), який надсилається інтерферуючим джерелом та каналу поширення сигналу g int(lTe), який є пов’язаним з ним. На Фігурі 2 описуються різні можливості побудови для s int. Для цього можуть втілюватися різні способи, залежно від випадку: - коли первісно надісланий інтерферуючий сигнал s int є повністю відомим, коли інтерферуючим джерелом є, наприклад (крім інших), зонд каналу, попередньо демодульований радіокомунікаційний або радіомовний емітер, радар або активний сонар: - спосіб вимірює фільтр, створений шляхом поширення сигналу від інтерферуючого емітера до приймача, у будь-який спосіб вимірювання, відомий спеціалістам у даній галузі, наприклад (крім інших), шляхом пошуку коефіцієнтів gint0=gint(l0Te), gint1=gint((l0+1).Te),..., gintL=gint((l0+L).Te) фільтра поширення gint=(gint1, gint2,...,gintL), які мінімізують у момент l0 часовий критерій ˆ найменших квадратів int’(l0, L), як зазначено нижче, виміряний згідно з сигналом x, прийнятим на відповідно вибраній антені, і згідно з опорним сигналом S int=(sint((l0+l)Te),sint((l0+l+1)Te),..., T sint((l0+l+L-1)Te)) , прийнятим для L часових зразків. Імпульсна характеристика gint належним чином відновленого фільтра містить усі шляхи поширення від емітера до приймача. Коли первісно надісланий інтерферуючий сигнал s int є частково відомим, коли інтерферуючим джерелом є, наприклад, комунікаційний емітер, який є стандартизованим або має відомі технічні специфікації: коректуючий фільтр для отриманого інтерферуючого сигналу вимірюють способами, відомими спеціалістам у даній галузі; або за часом та частотою синхронізації для апріорі відомих послідовностей у сигналі, за наявності, і з застосуванням будь-якого способу вимірювання gint, відомого спеціалістам у даній галузі, наприклад (крім ˆ інших), мінімізації попереднього критерію int’(l0, L), з повною або частковою обробкою відомої частини сигналу sint, який надсилається від емітера; або за часом та частотою синхронізації для апріорі відомих послідовностей у сигналі, за наявності, з наступною демодуляцією / корекцією усього інтерферуючого сигналу sint та застосуванням будь-якого способу вимірювання gint, який є відомим спеціалістам у даній галузі, наприклад (крім інших), мінімізації попереднього критерію ˆ int’(l0, L), шляхом використання частини відновленого інтерферуючого сигналу s int; або, зрештою, за допомогою сліпої синхронізації символів, відновлення / демодуляцією / корекцією несучої, що стосується отриманого сигналу x та використання апріорі наявних даних про сигнал, який надсилається від інтерферуючого джерела sint, для його відновлення, з наступним застосуванням будь-якого способу вимірювання gint відомого спеціалістам у даній галузі, ˆ наприклад (крім інших), мінімізації попереднього критерію int’(l0, L), шляхом використання всього відновленого інтерферуючого сигналу s int або його частини. Слід зазначити, що один або інший з попередніх етапів застосовують в принципі або до сигналу x, отриманого на конкретній, відповідним чином вибраній антені, що призначається, наприклад, для демодуляції прямого сигналу (необмежувальний приклад з Фігури 2), або для сигналу, отриманого на мережу антен, можливо, ту саму, що застосовується для застосування ˆ способу до корисного сигналу: у цьому разі попередній вираз критерію int’(l0, L), який підлягає 10 UA 102230 C2 5 10 15 20 25 30 35 40 мінімізації, залишається формально ідентичним з врахуванням x((l 0+l)Te), gintl та sint((l0+l)Te), векторів сигналів з розміром N1, причому N, є кількістю антен, і з врахуванням векторної норми у простої N-просторових комплексних векторів. У цьому разі отримують просторово-часове (а не лише часове) визначення імпульсної характеристики каналу поширення між інтерферуючим джерелом та датчиком. На основі одного або іншого з попередніх етапів розраховують фільтр поширення g int між інтерферуючим емітером та приймачем додатково до сигналу, який надсилається від інтерферуючого джерела sint(kTe). Крім того, через включення припущень доплерівського зсуву до опорного сигналу s int і через застосування повторень та періодичності сигналу sint як основи забезпечується можливість точного вимірювання відносних дрейфів гетеродинів, змішувачів частот та тактових генераторів датчика. Етап 6B). Якщо вибраний інтерферуючий емітер є фіксованим або має відому позицію та кінематику і є більш стійким за датчик, виміряні значення дрейфу використовують при застосуванні способу, який є предметом винаходу, для збільшення часу інтеграції (тобто, збільшення параметра K), а отже, поліпшення чутливості способу, його розділення за доплерівською частотою та його здатності до розрізнення низькошвидкісних рефлекторів або емітерів. І нарешті, повторення цього розширення способу для кількох інтерферуючих емітерів дозволяє додатково уточнювати виміряні значення перед корекцією описаних нижче сигналів. Етап 6C). Корисний сигнал, компонент загального сигналу на мережі антен, потім попередньо фільтрують шляхом згортання сигналу від інтерферуючого емітера s int шляхом попереднього вимірювання фільтра поширення емітера-приймача gint, з наступним відніманням доставлення, яке є результатом цієї операції, від загального сигналу, отриманого на антені. Таким чином, більшість доставленої енергії від інтерферуючого емітера (прямий канал + кратні канали) вимірюється шляхом (часової) обробки, відносне доставлення та співвідношення сигналу з перешкодами для корисного сигналу, який надсилається від емітера або рефлектора, значно збільшується у сигналі, який створюється в результаті цієї попередньої фільтрації. Спосіб згідно з винаходом після цього застосовують до сигналу x’, який в результаті створюється з вхідного сигналу x по завершенню цієї попередньої фільтрації, яка, таким чином, підвищує рівень загальної чутливості та загальної ефективності. Етап 6D). Через вимірювання та компенсацію дрейфів генератора тактових частот та дрейфів гетеродина у приймачі значення K кількості зразків, які можуть використовуватися при втіленні способу, а отже, розділення за доплерівською частотою, здатність до розпізнавання низькошвидкісних рефлекторів і база імпульсного сигналу та чутливість способу також великою мірою збільшуються при цьому розширенні. Розширення способу, при якому загальний шум є некруговим Фігура 3 представляє інший типовий варіант втілення, коли перешкоди мають некругову властивість, і на етапах, які здійснюються у цьому розширенні попереднього способу, використовується ця властивість. Такий приймач може бути передбачений незалежно від некругової властивості надісланого сигналу. У найкращому випадку надісланий сигнал є прямолінійним, тобто, таким, для якого його комплексна обвідна s(kT e) має реальні значення. Це, зокрема, стосується надісланих сигналів з амплітудною модуляцією (AM, ASK) або двопозиційною фазовою модуляцією (BPSK). У цих умовах бажано замінити достатню ˆ статистику (8) на статистику Cnc (l,m,K ) , 10 на Фігурі 3, яка визначається таким чином: 45 де , і та 50 визначаються як (5) та (6), де замінюється на 6 на Фігурі 3, функціональною схемою достатньої статистики (16). Статистика (17) розширюється до надісланих сигналів, які стають квазі-прямолінійними після деротаційної попередньої обробки. Це стосується, зокрема, надісланих сигналів типу /2-BPSK або OQPSK або навіть певних безперервних фазових модуляцій (CPM), тобто, частотномодульованих і з безперервною фазою, таких, як, наприклад, сигнали MSK та GMSK. У цих умовах повинна втілюватися достатня статистика (17), але шляхом заміни просторових векторів на просторово-часові вектори, деротовані з L часовими показниками: 55 , якщо L є непарним 11 UA 102230 C2 числом, і , якщо L є парним числом, де і T позначає час надісланого сигналу. 5 10 15 20 Розширення способу, при якому напрямний вектор рефлектора є відомим або припускається Номінальне розширення Якщо поширення відбувається у вільному просторі, корисний вектор каналу h s виражається як hs , де s та s, відповідно, відповідають фазі та напрямному векторові сигналу, який надсилається від емітера або рефлектора. Якщо передбачається просторова розгортка у просторі, як у разі традиційних структур виявлення, вектор s може вважатися відомим, коли сканується просторовий стільник емітера або рефлектора. У цих умовах, згідно з припущеннями від A1 до A6, але з припущенням A4, заміненим на припущення A4’ єдиної невідомої фази s, традиційні структури виявлення виявляються оптимальними лише для сигналів, які надсилаються від малопотужних емітерів або рефлекторів, і стають субоптимальними для сигналів, які надсилаються від високопотужних емітерів або рефлекторів. У цих умовах оптимізація рівня ефективності виявлення для всіх рівнів сигналу може виявитися корисною, якщо брати за мету дуже низькі показники FAP. За певних умов достатня статистика для виявлення відомого сигналу s(kT e) протягом періоду 0 k K – 1 у просторовому стільнику s, стільнику відстані l та стільнику доплерівського зсуву m вказується, як представлено у 13, 12, 14 на Фігурі 4, ˆ де C (l, m, K), 12, визначається як (8). Вираз (17) є розширенням (8), якщо вектор s є ˆ відомим. Для низьких значень SINR (SINR
ДивитисяДодаткова інформація
Назва патенту англійськоюMethods and devices for determining the impulse response of propagation channels involving emitters, reflectors and sensors that are fixed or mobile
Автори англійськоюChevalier, Pascal, Delaveau, Francois, Pipon, Francois
Назва патенту російськоюСпособы и устройства для определения импульсной характеристики каналов распространения, которые включают эмиттеры, рефлекторы и датчики, являющиеся фиксированными или подвижными
Автори російськоюШевалье Паскаль, Делаво Франсуа, Пипон Франсуа
МПК / Мітки
МПК: G01S 7/292
Мітки: визначення, характеристики, пристрої, фіксованими, способи, включають, емітери, імпульсної, поширення, рефлектори, рухомими, датчики, каналів
Код посилання
<a href="https://ua.patents.su/23-102230-sposobi-ta-pristro-dlya-viznachennya-impulsno-kharakteristiki-kanaliv-poshirennya-yaki-vklyuchayut-emiteri-reflektori-ta-datchiki-yaki-eh-fiksovanimi-abo-rukhomimi.html" target="_blank" rel="follow" title="База патентів України">Способи та пристрої для визначення імпульсної характеристики каналів поширення, які включають емітери, рефлектори та датчики, які є фіксованими або рухомими</a>
Спосіб визначення робочої характеристики біта-індикатора якості у системі зв’язку з багатостанційним доступом і кодовим розділенням каналів та пристрій для його здійснення
Номер патенту: 76122
Опубліковано: 17.07.2006
Автори: Чен Тао, Батсумі Вінс Райо, Ейдін Левент
МПК: H04B 17/00
Мітки: багатостанційним, зв'язку, здійснення, робочої, каналів, доступом, системі, спосіб, якості, пристрій, розділенням, визначення, кодовим, біта-індикатора, характеристики
Формула / Реферат:
1. Спосіб визначення робочої характеристики біта-індикатора якості у системі зв'язку з багатостанційним доступом і кодовим розділенням каналів, який включає:a) конфігурування приймача для очікування прийому у каналі зв'язку при повношвидкісній передачі даних,b) передачу сигналу від передавача до зазначеного приймача, причому зазначений сигнал є сигналом переносу зазначеного каналу зв'язку при швидкості передачі даних, відмінній...
Композиції, які включають сполуки модафінілу, способи їх одержання та способи лікування
Номер патенту: 75372
Опубліковано: 17.04.2006
Автори: Джейкобз Мартін Дж., МакІнтайр Бредлі Т., Пейтел Піюш Р.
МПК: A61K 31/165, A61K 47/14, A61K 9/48, A61K 47/26
Мітки: модафінілу, сполуки, одержання, лікування, включають, композиції, способи
Формула / Реферат:
1. Неводна фармацевтично прийнятна композиція, що включає(a) сполуку модафінілу;(b) щонайменше один органічний розчинник, вибраний з групи, що складається з гліцерину, пропіленгліколю, етилового ефіру діетиленгліколю, пропіленкарбонату, моногліцериду з ланцюгом середньої довжини або поліетиленгліколю, і(c) щонайменше одну поверхнево-активну речовину, вибрану з групи, що складається з ефіру жирної кислоти...
Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ
Номер патенту: 79016
Опубліковано: 10.05.2007
Автори: Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: G01F 23/284, G01F 23/28
Мітки: перетворення, пристрою, спосіб, визначення, сипких, середовищ, характеристики, параметрів, рідких
Формула / Реферат:
1. Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ за затримкою відбитого сигналу відносно посланого у контрольоване середовище зондувального імпульсного сигналу, який полягає у тому, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання, який відрізняється тим, що серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання виконують...
Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ
Номер патенту: 11026
Опубліковано: 15.12.2005
Автори: Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: G01F 23/284, G01F 23/28
Мітки: характеристики, середовищ, спосіб, параметрів, сипких, визначення, пристрою, рідких, перетворення
Формула / Реферат:
1. Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ за затримкою відбитого сигналу відносно посланого у контрольоване середовище зондувального імпульсного сигналу, який полягає у тому, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання, який відрізняється тим, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання...
Способи, оптичний записувальний пристрій, що використовує такі способи, і оптичний носій запису для використання в цих способах та в цьому пристрої
Номер патенту: 82174
Опубліковано: 25.03.2008
Автори: Стек Альберт, Дзю Цай Дж., ван де Пас Йоріс, Спруйт Йоханнес Х.М.
МПК: G11B 7/0045, G11B 7/125
Мітки: цих, пристрої, способи, пристрій, використовує, оптичний, такі, способах, цьому, використання, записувальний, запису, носій
Формула / Реферат:
1. Спосіб встановлення оптимального значення певного параметра записування для застосування в оптичному записувальному пристрої для записування інформації на оптичний носій запису (1) за допомогою пучка випромінення (5), який включає перший етап (41) записування на носій запису послідовності тестових комбінацій, кожну з яких записують з інакшим значенням рівня записувальної потужності (