Землеробське знаряддя з пристроєм для подання сигналу оператору, що знаряддя проходить засіяну ділянку
Формула / Реферат
1. Землеробське знаряддя для внесення зернистої речовини в ґрунт, яке містить:
сівалку, яка має множину інструментів, які входять у зачеплення з ґрунтом, які можуть пересуватися між піднятим положенням і опущеним положенням, при цьому інструменти, які входять у зачеплення з ґрунтом, виконані з можливістю виходу із зачеплення з ґрунтом, перебуваючи в піднятому положенні, і виконані з можливістю входу в зачеплення з ґрунтом, перебуваючи в опущеному положенні;
навігаційну супутникову систему, яка картує рух знаряддя, коли інструменти, які входять у зачеплення з ґрунтом, знаходяться в опущеному положенні, і подає вихідний сигнал, коли знаряддя проходить ділянку ґрунту, яка вже була засіяна;
прилад сповіщення, який вмикається, коли навігаційна супутникова система подає вихідний сигнал, при цьому прилад сповіщення виконаний з можливістю сповіщення оператора, що згадане знаряддя в даний момент проходить ділянку ґрунту, яка була засіяна зернистою речовиною, без автоматичного регулювання внесення зернистої речовини в згадану ділянку ґрунту, яка раніше була засіяна зернистою речовиною, для сповіщення оператора знаряддя, що щонайменше один з множини інструментів, які входять у зачеплення з ґрунтом, необхідно перемістити в підняте положення; і
контролер, який зберігає ввімкнення приладу сповіщення доти, поки оператор не прийме коригувальні заходи для виведення інструментів, які входять у зачеплення з ґрунтом, із зачеплення з ґрунтом, який був засіяний.
2. Землеробське знаряддя за п. 1, в якому прилад сповіщення включає в себе світловий прилад, який освітлюється, коли навігаційна супутникова система подає вихідний сигнал.
3. Землеробське знаряддя за п. 1, в якому сповіщення являє собою попереджувальний сигнал, який звучить, коли навігаційна супутникова система подає вихідний сигнал.
4. Землеробське знаряддя за п. 1, в якому прилад сповіщення розташований всередині кабіни оператора знаряддя.
5. Землеробське знаряддя за п. 1, яке додатково містить пневматичний візок, з'єднаний з сівалкою і виконаний з можливістю подачі зернистої речовини в сівалку.
6. Землеробське знаряддя за п. 1, в якому навігаційна супутникова система являє собою глобальну супутникову навігаційну систему визначення місцеположення.
7. Землеробське знаряддя за п. 1, в якому контролер зберігає ввімкненя приладу сповіщення доти, поки оператор не перемістить інструменти, які входять у зачеплення з ґрунтом, в підняте положення.
8. Землеробське знаряддя для введення матеріалу в ґрунт, в якому матеріалом є насіння, добрива або насіння і добрива, яке містить:
вузол рами, який включає в себе центральну раму і множину витягнутих встановлюваних важелів, встановлених на центральній рамі, при цьому кожен виконаний з можливістю переміщення з піднятого положення в опущене положення, і засоби, які входять у зачеплення з ґрунтом, встановлені на кожному зі встановлюваних важелів і виконані з можливістю входження в зачеплення із ґрунтом, коли кожен зі встановлюваних важелів знаходиться в опущеному положенні;
засіб підіймання і опускання вузла рами між піднятим положенням і опущеним положенням; і
засіб попередження оператора згаданого знаряддя, з'єднаний з навігаційною супутниковою системою, для сповіщення згаданого оператора, що навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні, при цьому засіб попередження повідомляє оператора, що згадане знаряддя в даний момент проходить ділянку ґрунту, яка була засіяна зернистою речовиною, без автоматичного регулювання внесення зернистої речовини в згадану ділянку ґрунту, яка раніше була засіяна зернистою речовиною, і повідомляє оператора знаряддя вручну активувати засіб підіймання і опускання для підняття вузла рами з опущеного положення в підняте положення.
9. Землеробське знаряддя за п. 8, в якому засіб сповіщення включає в себе звукове сповіщення, яке звучить, коли навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні.
10. Землеробське знаряддя за п. 8, в якому засіб сповіщення включає в себе один або більше світлових приладів, які освітлюються, коли навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні.
11. Землеробське знаряддя за п. 8, в якому засіб сповіщення розташований всередині кабіни оператора знаряддя.
12. Землеробське знаряддя за п. 8, яке додатково містить пневматичний візок, з'єднаний з вузлом рами і виконаний з можливістю подачі зернистої речовини в засіб дозування матеріалу.
Текст
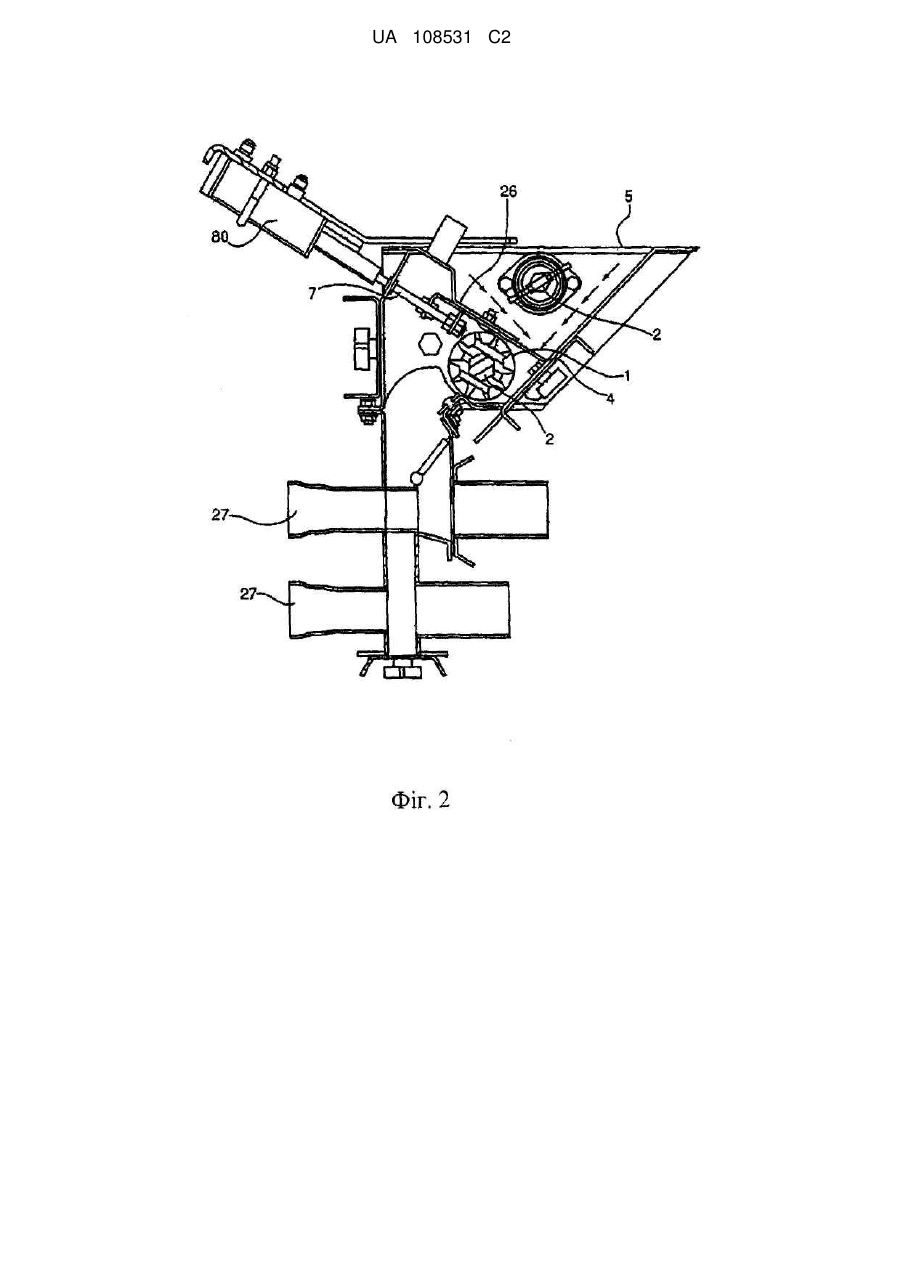
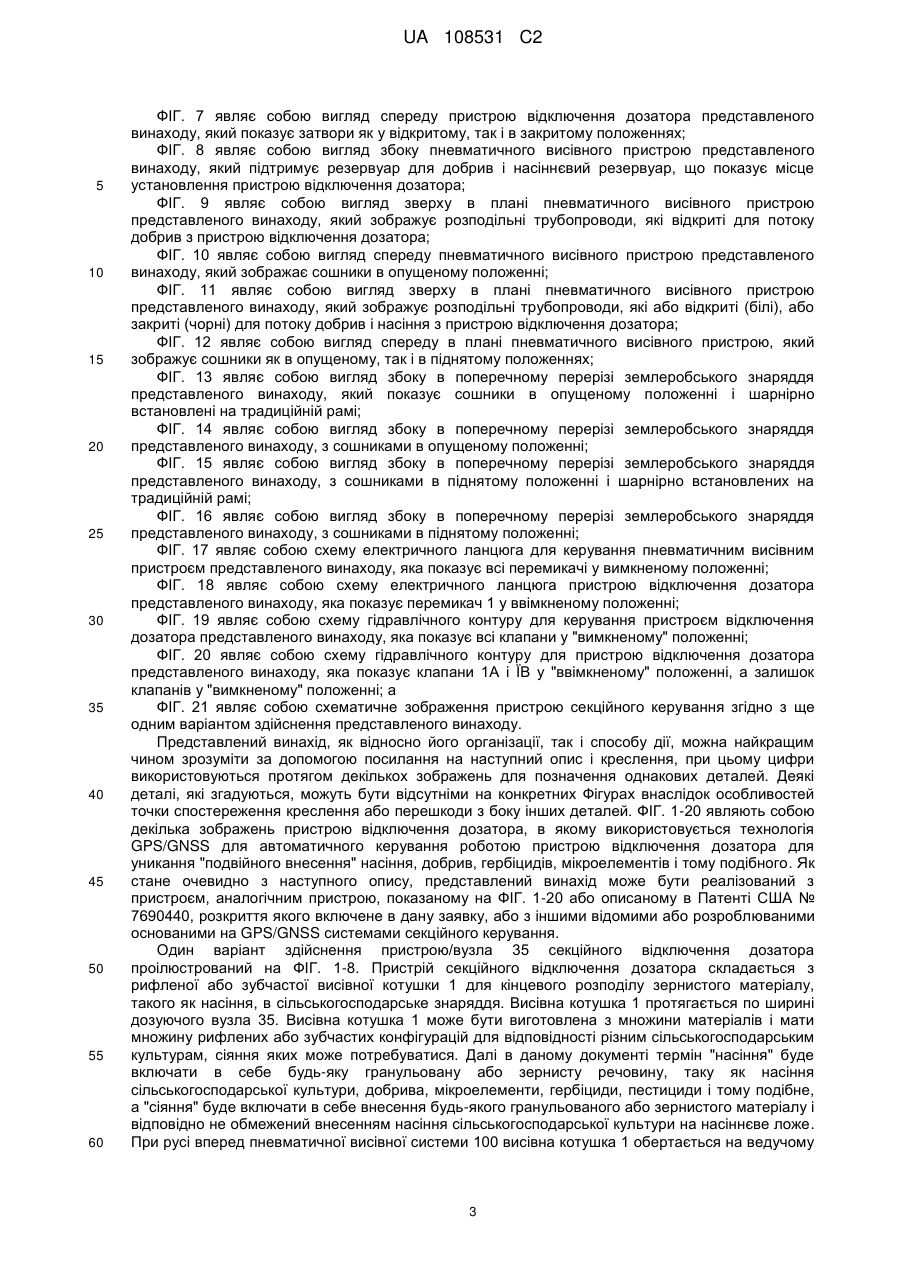
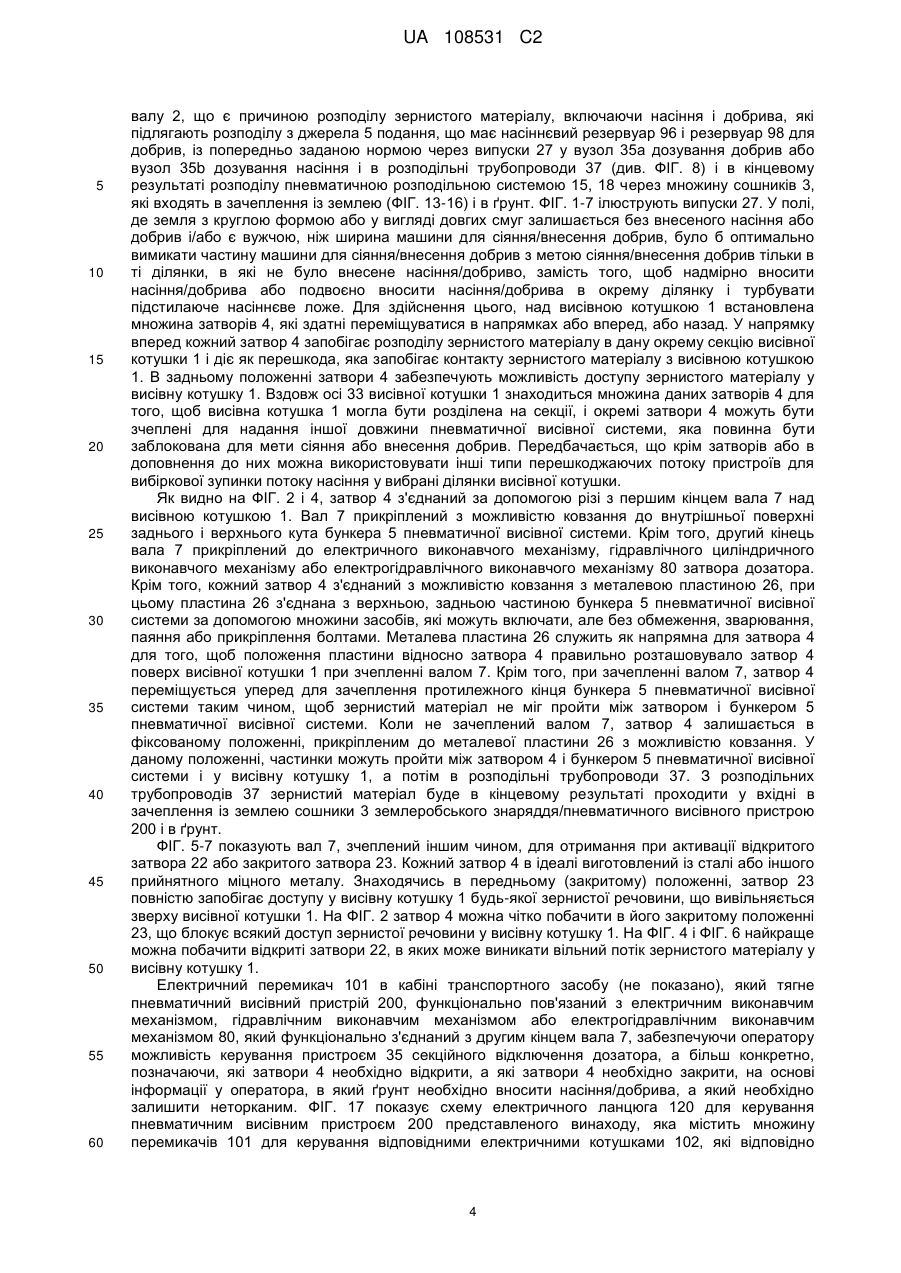
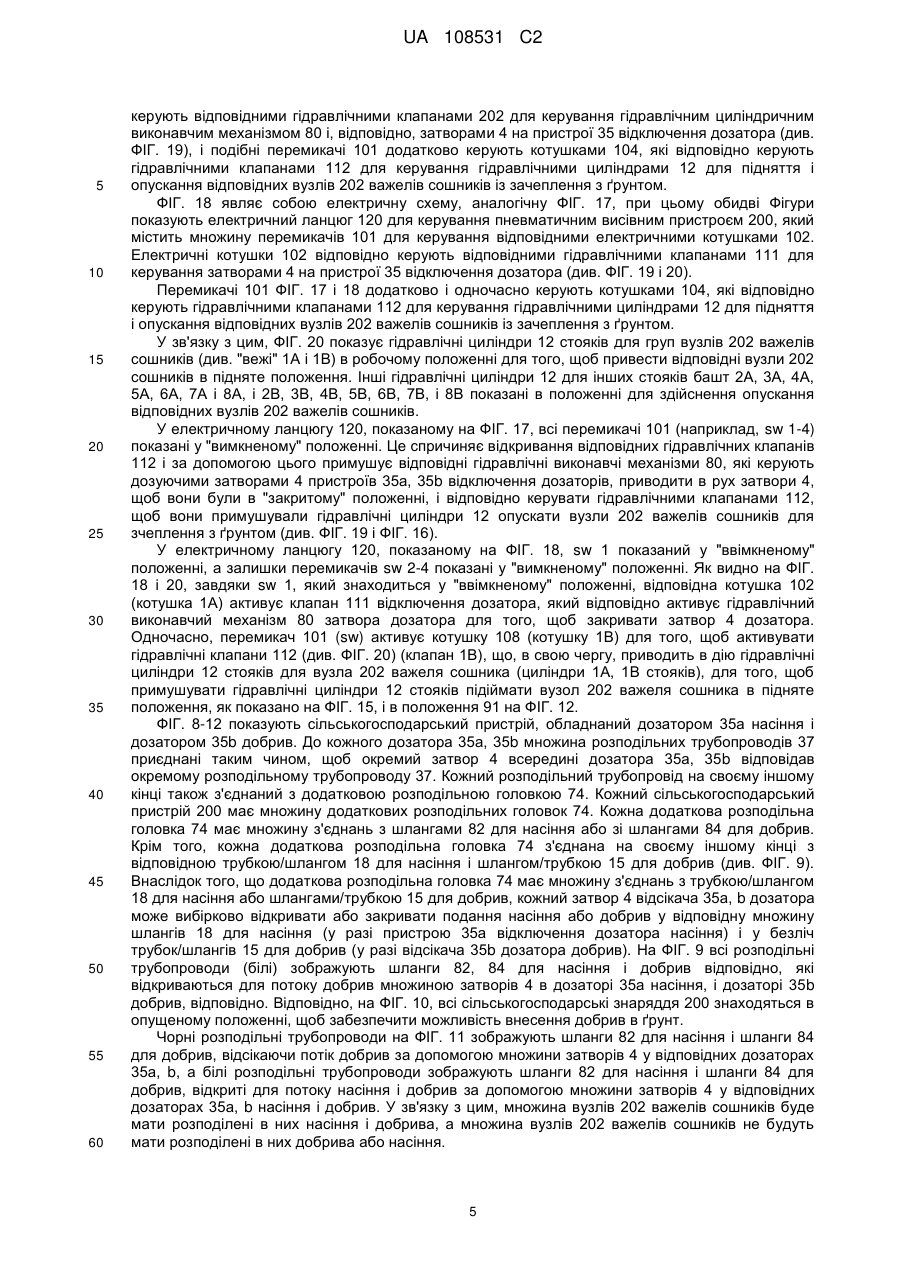
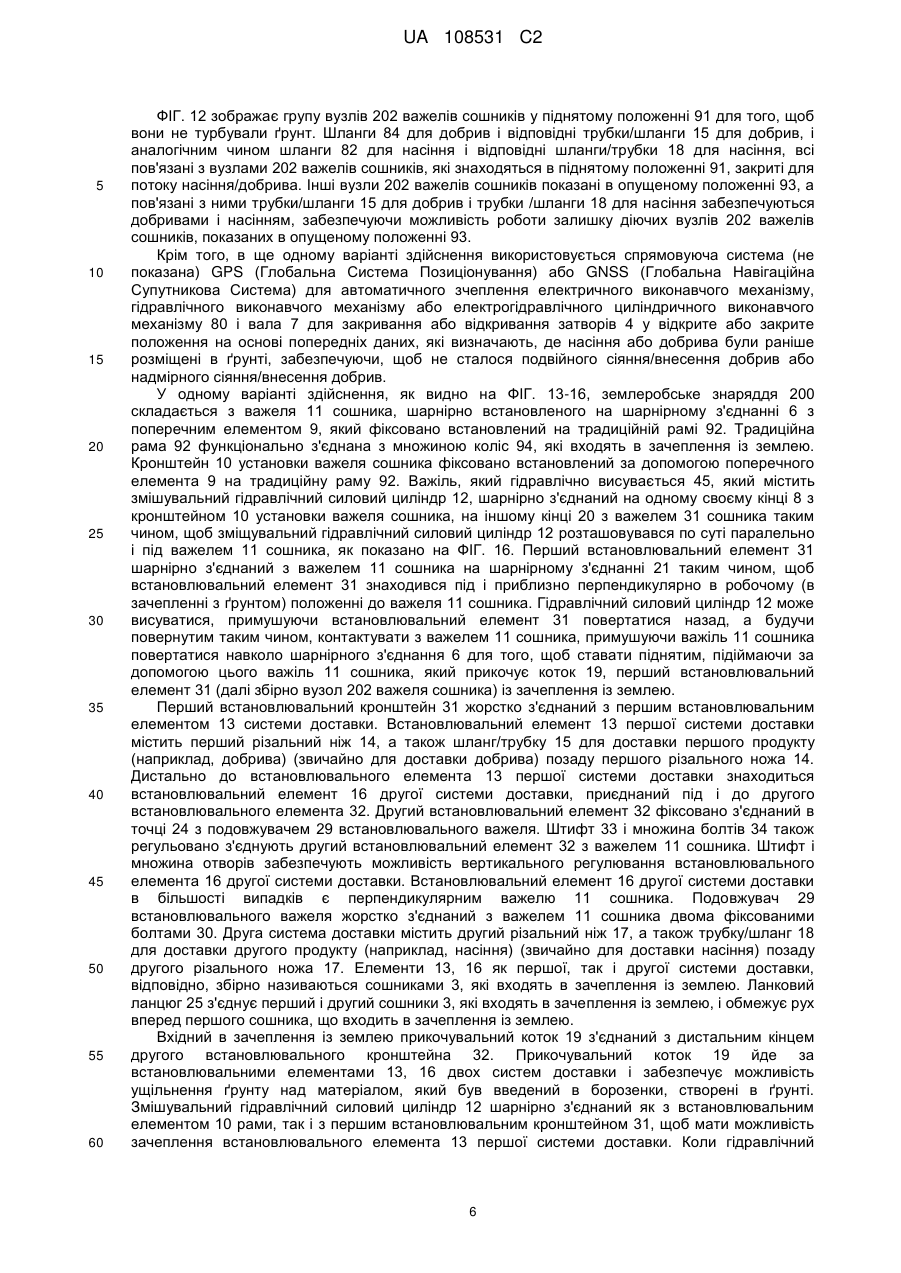
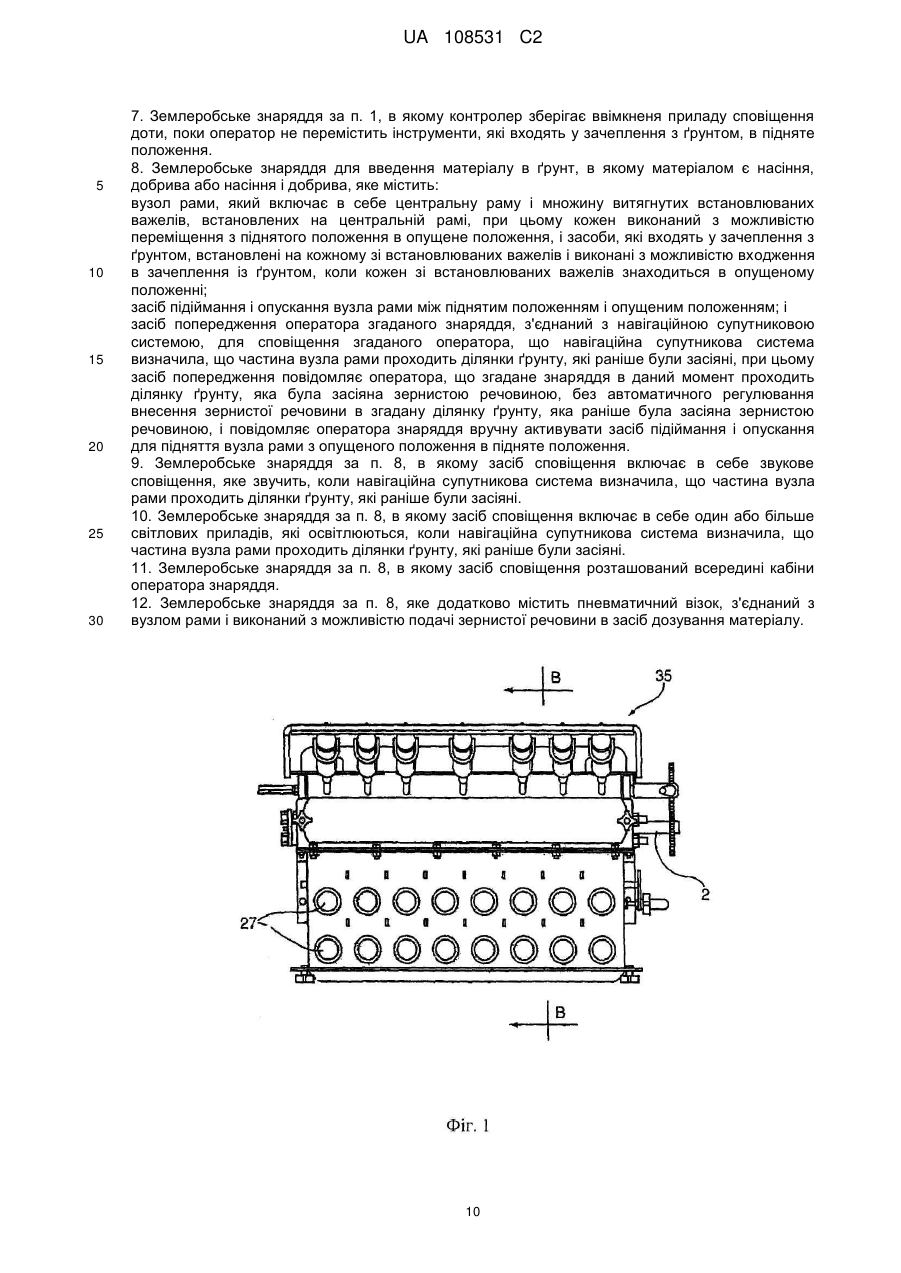
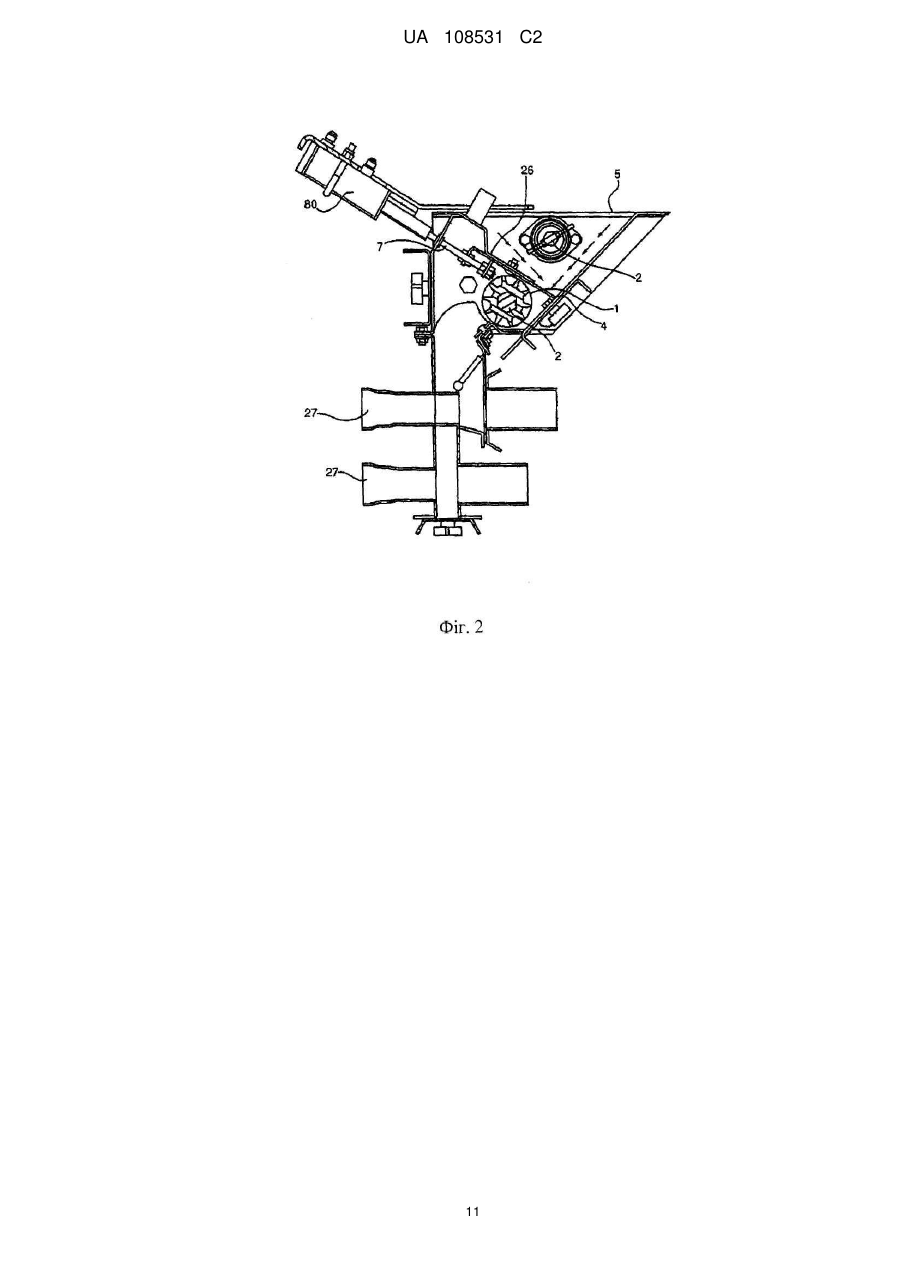
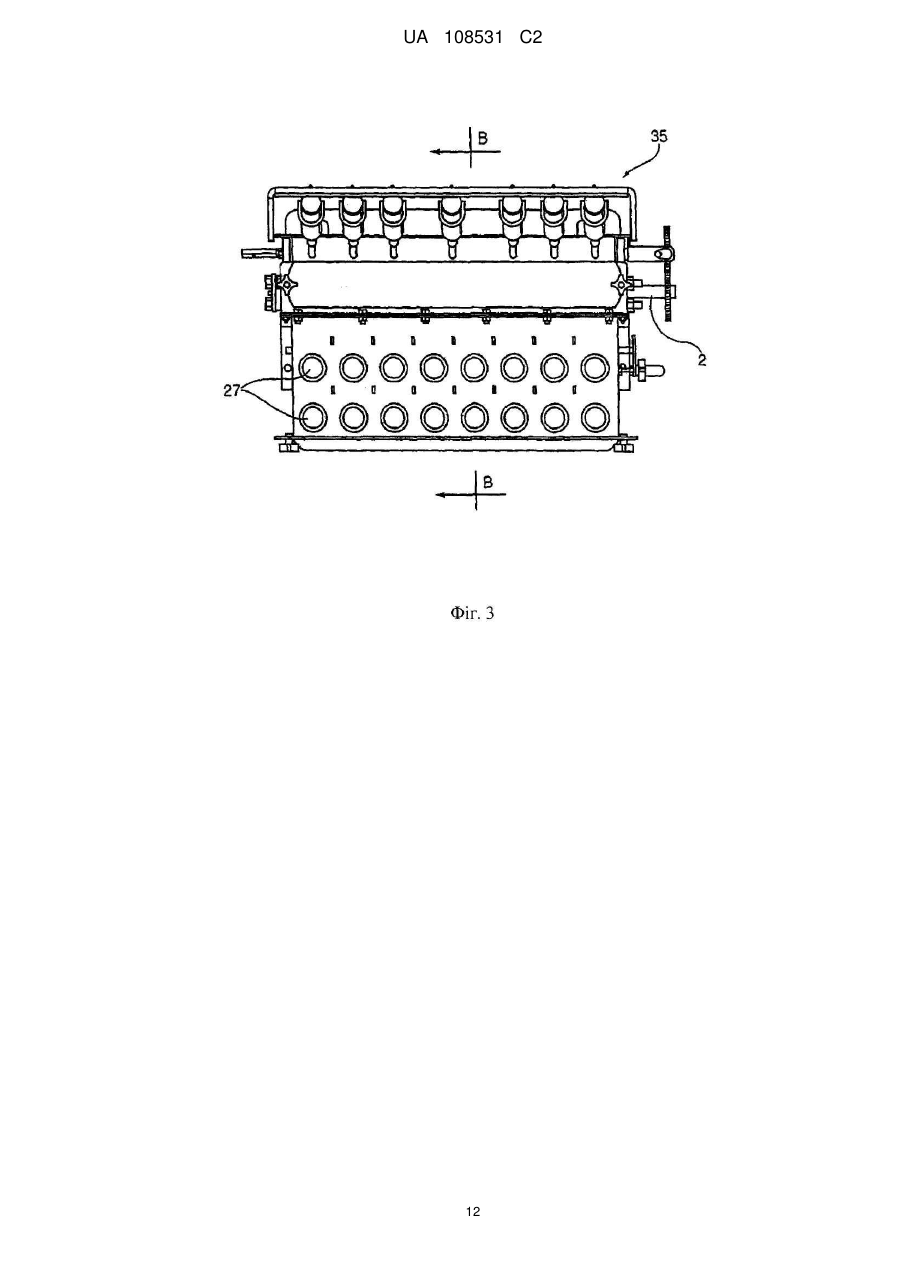
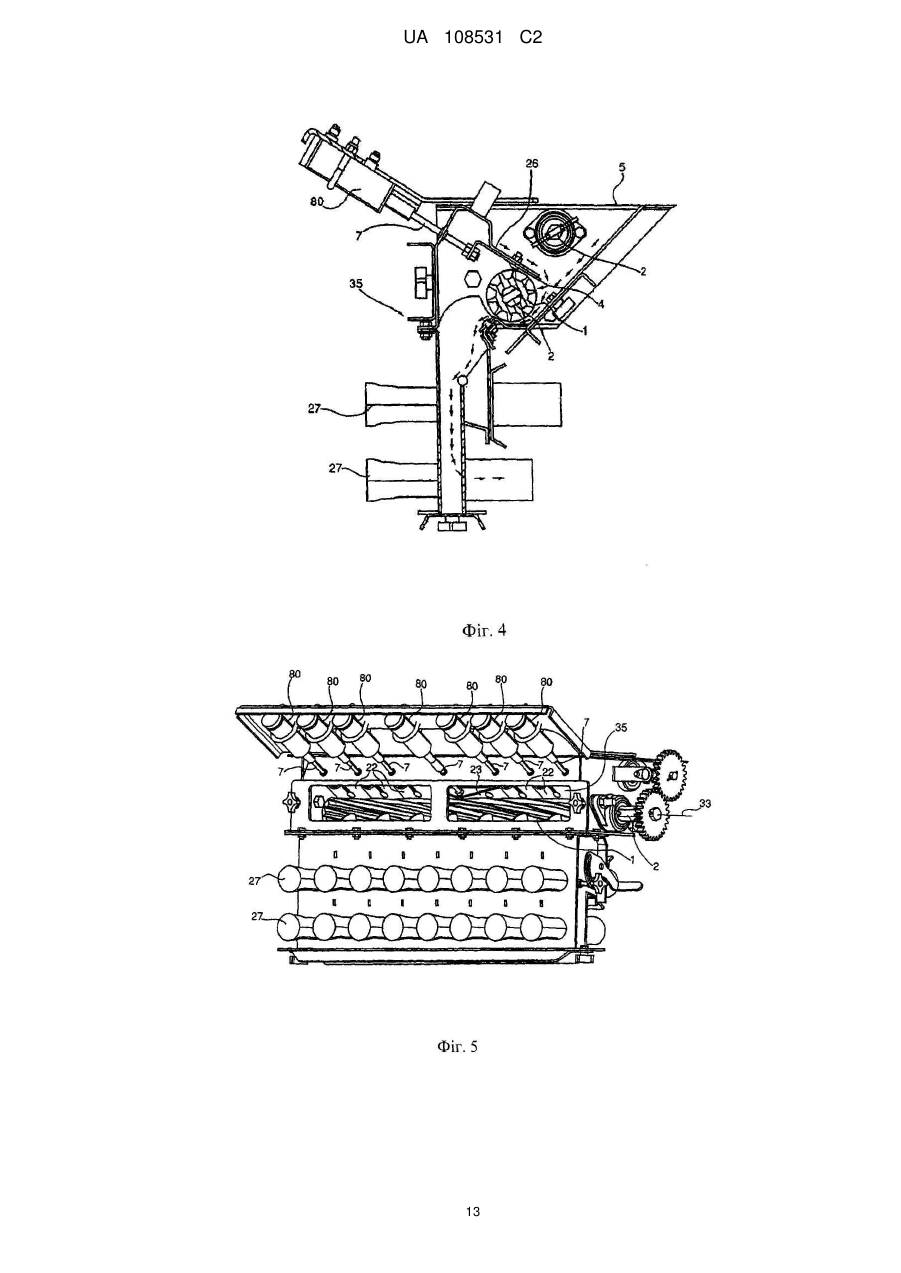
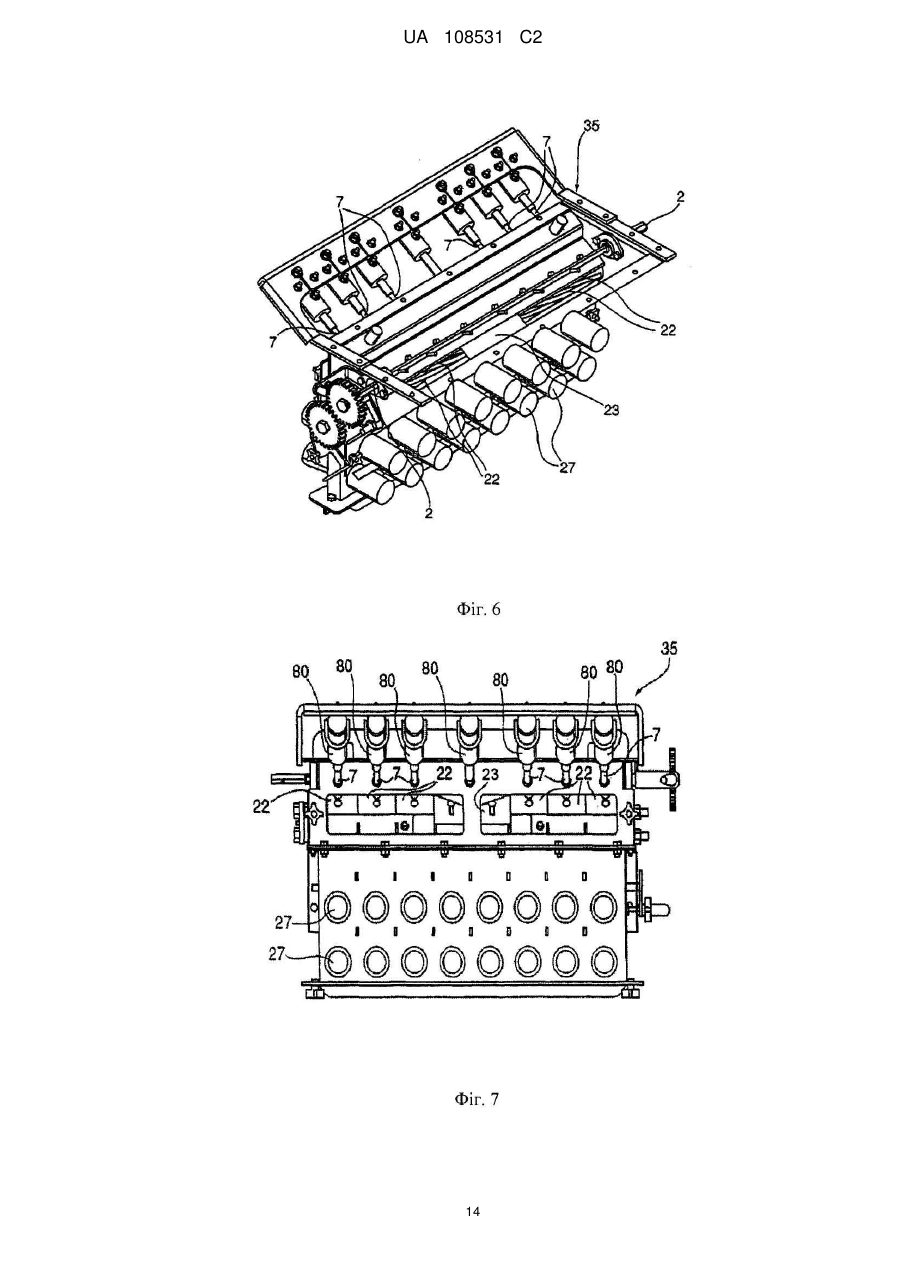
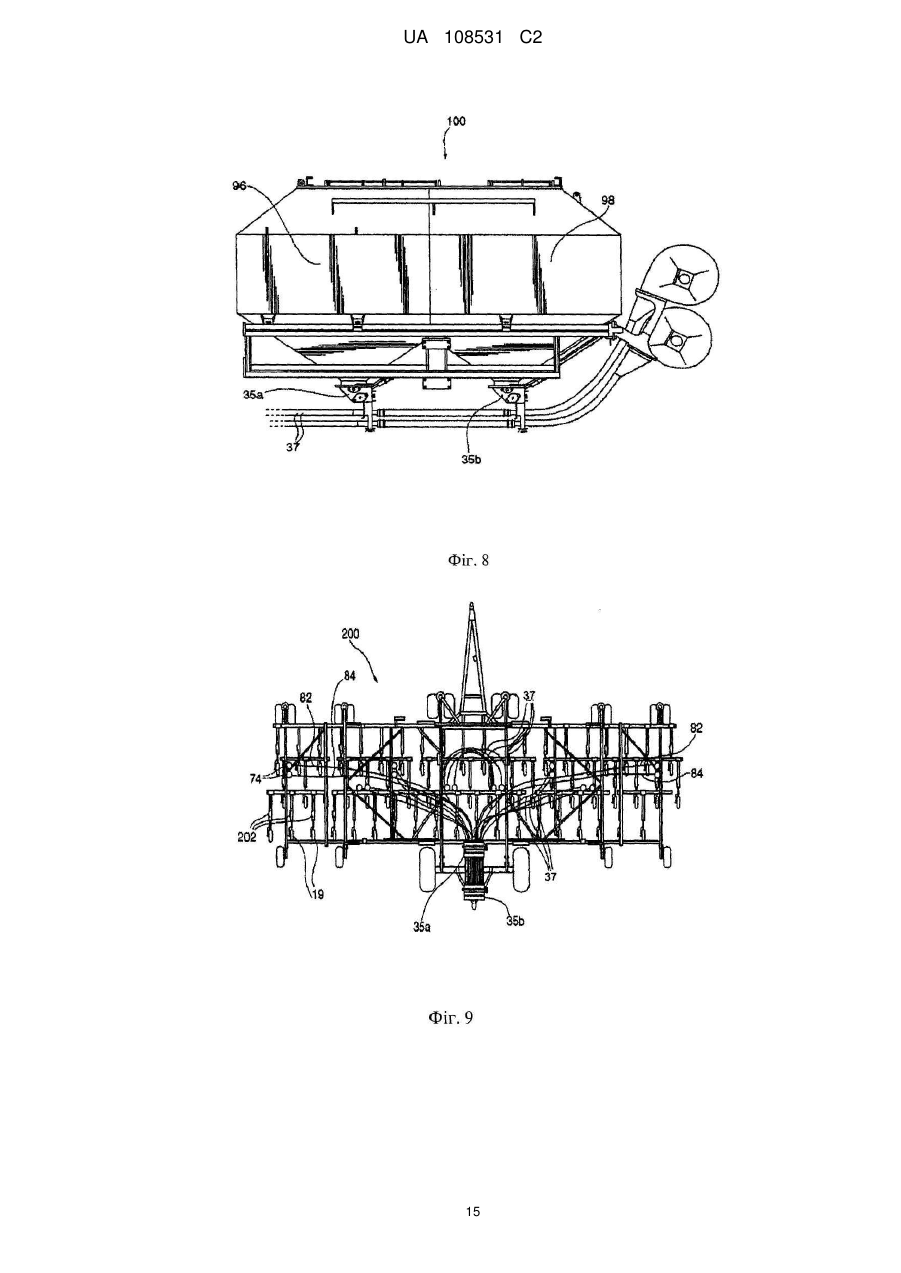
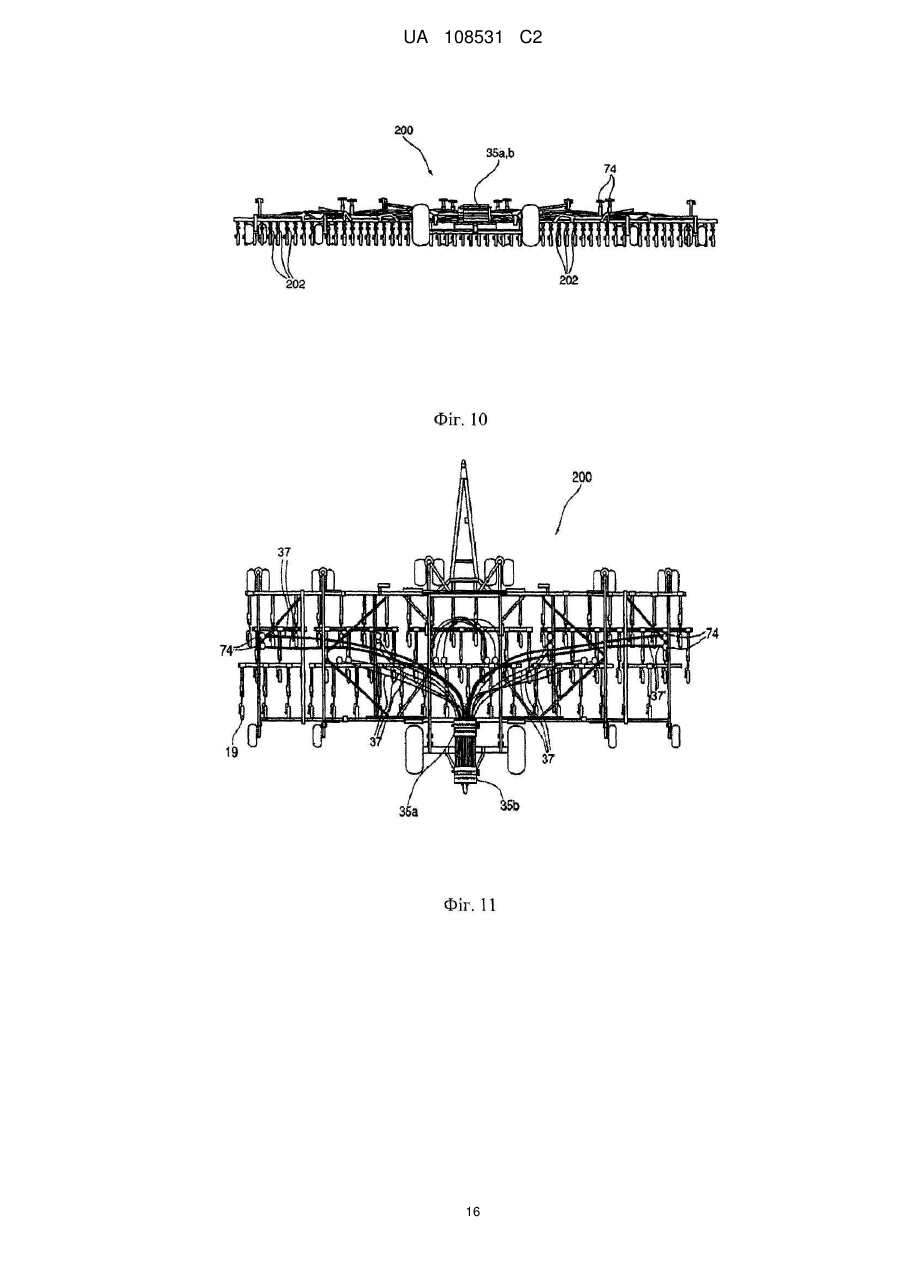
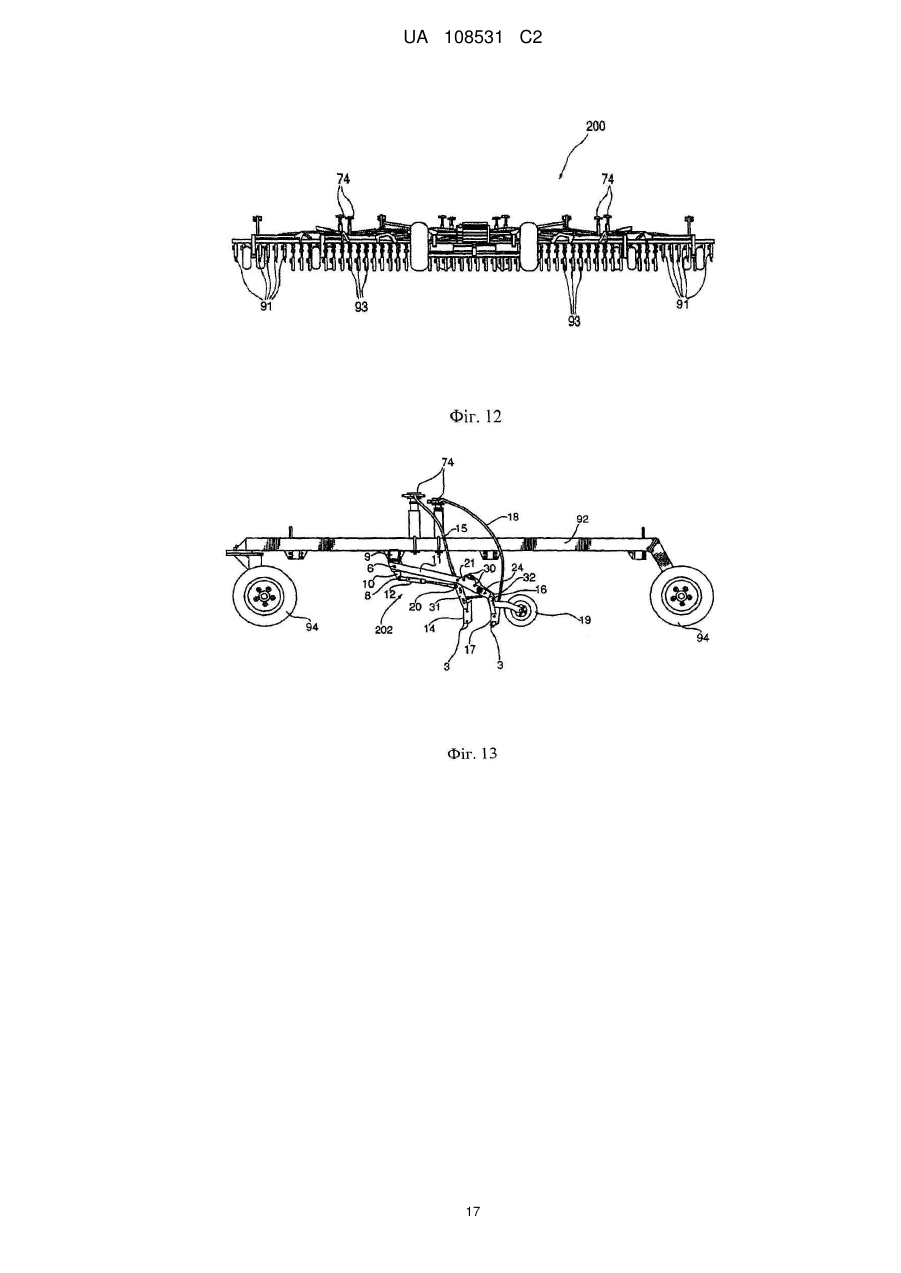
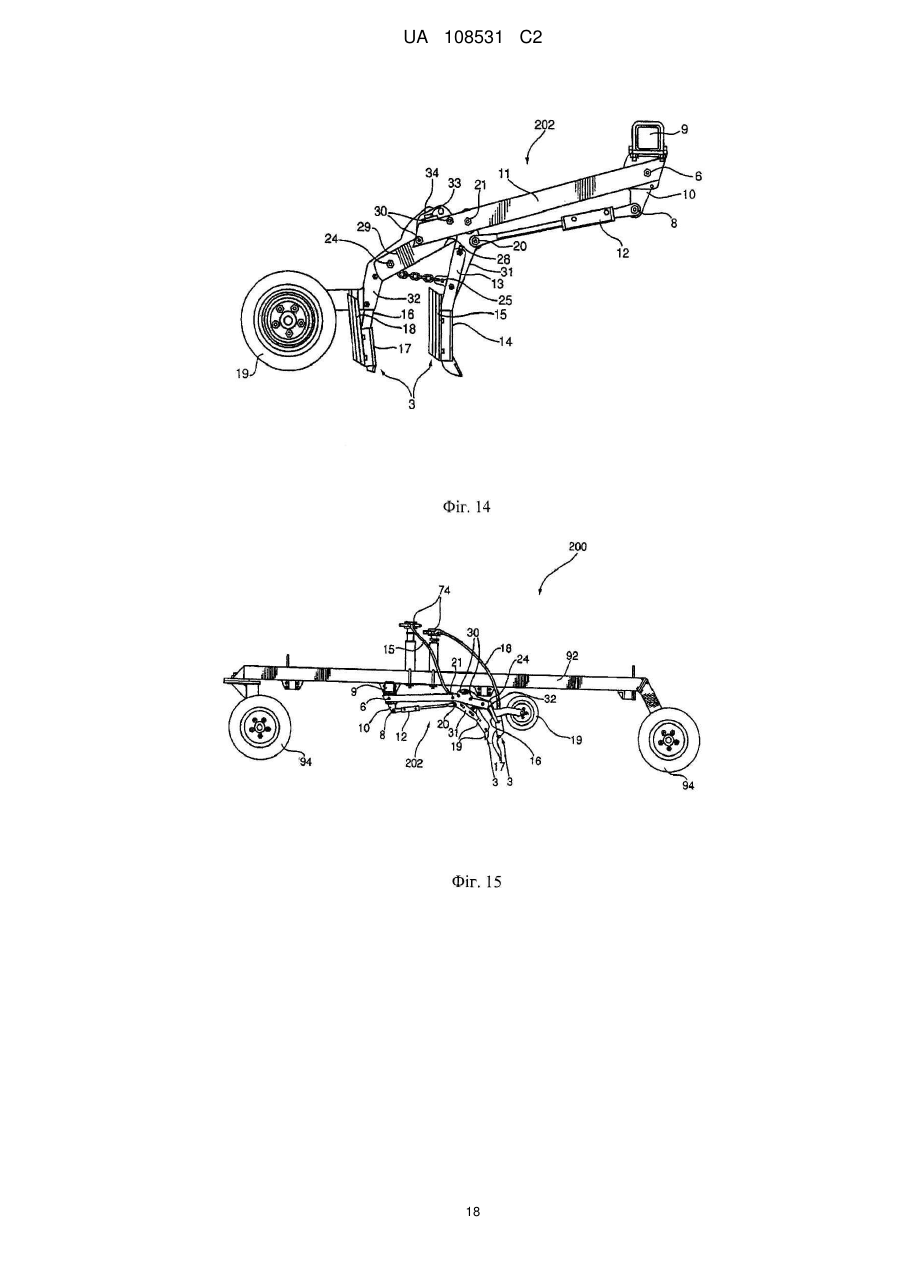
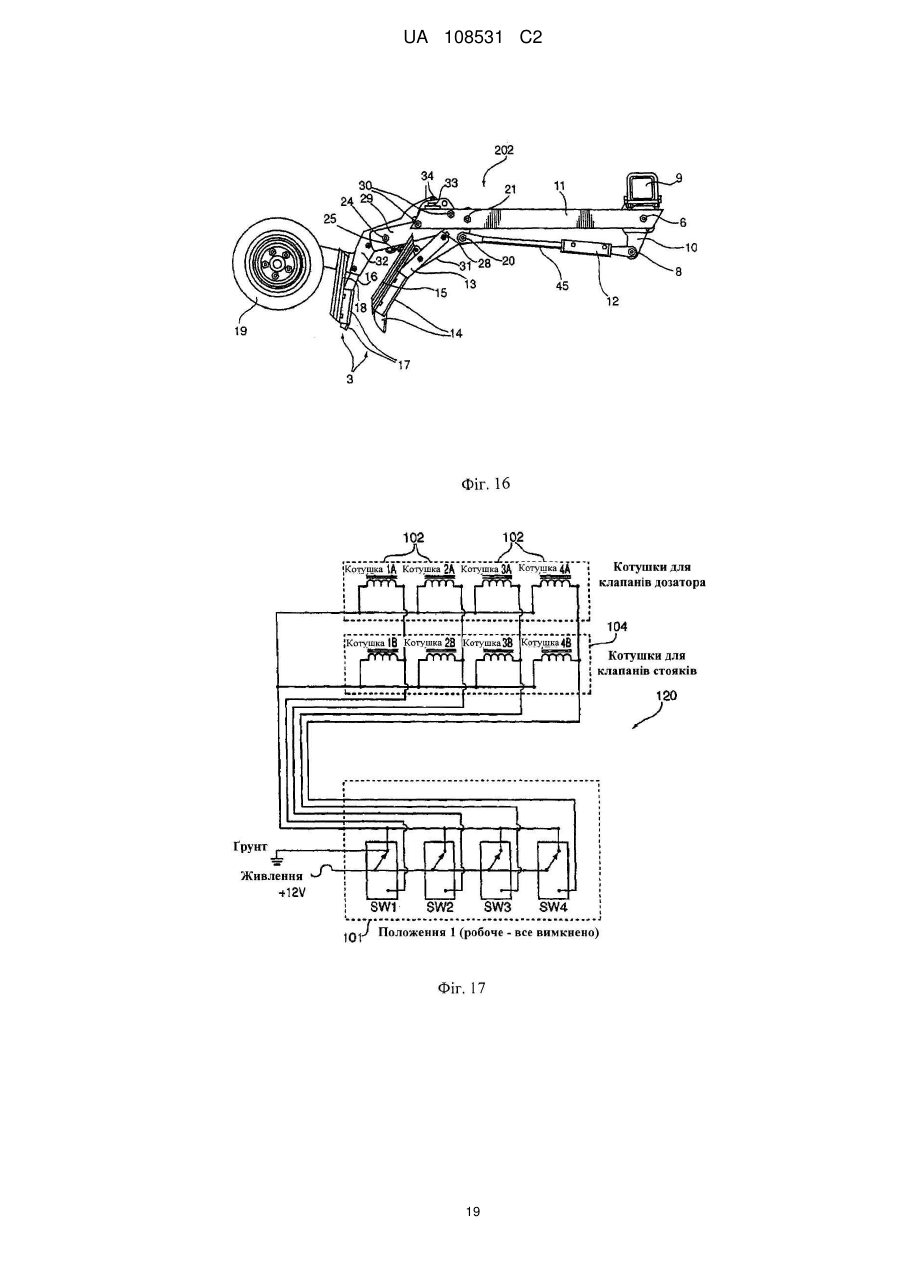
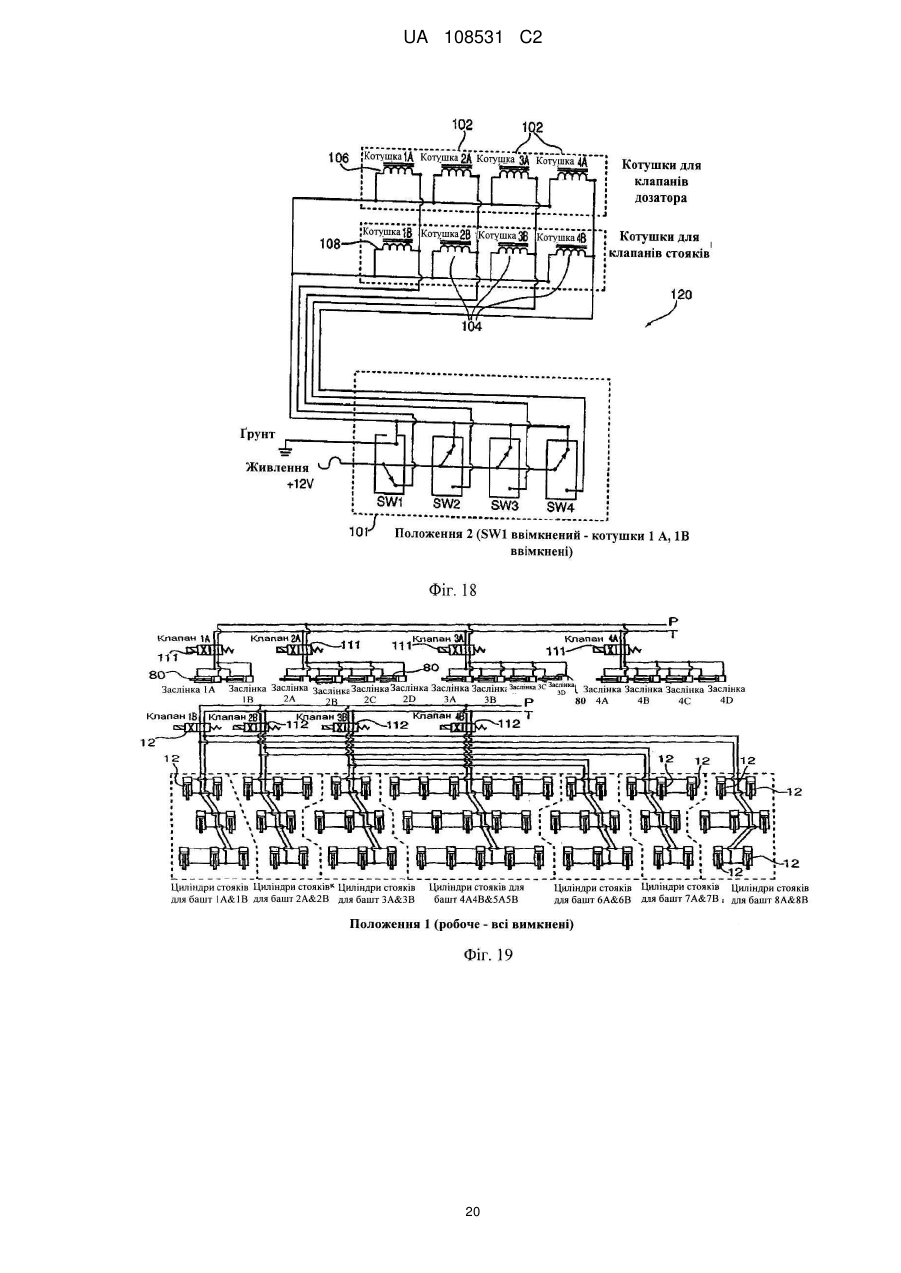
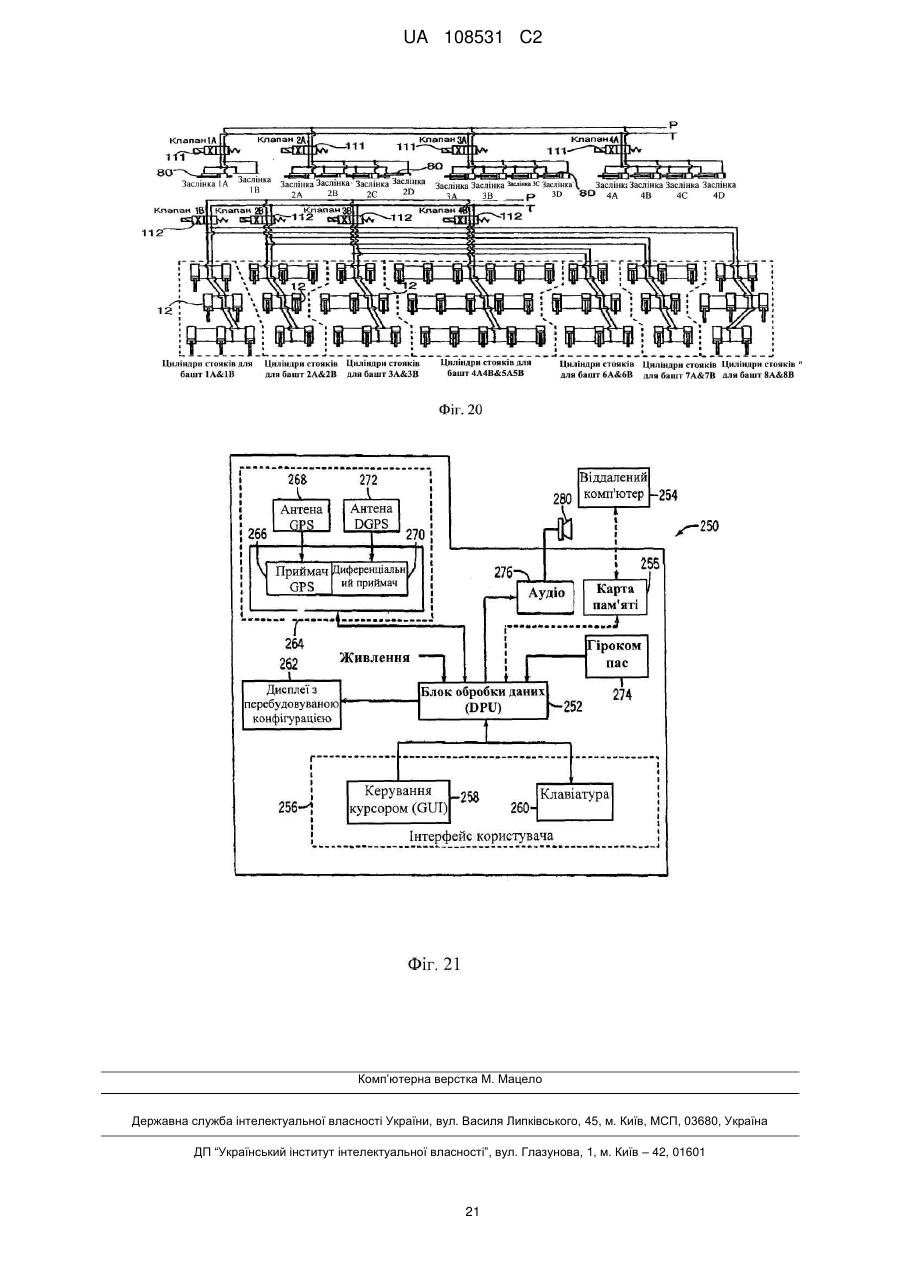
Реферат: Землеробське знаряддя містить пристрій секційного керування, що підказує оператору знаряддя, коли знаряддя або його частина проходить по землі, яка вже була засіяна і/або потривожена. Пристрій включає в себе приймач GPS або GNSS, який взаємодіє з системою GPS або GNSS, і контролер, який картує рух знаряддя для того, щоб дані положення знаряддя в реальному часі можна було порівняти з картою руху. Коли виявляється, що положення знаряддя, або його частини відповідає руху по раніше засіяній і/або потривоженій землі, контролер, активує механізм подання сигналу в кабіні оператора знаряддя для сповіщення оператора, що необхідно здійснити секційне керування, тобто припинення дозування продукту або підняття бруса для навішування робочих органів. При цьому контролер зберігає ввімкнення приладу сповіщення доти, поки оператор не прийме коригувальні заходи для виведення інструментів, які входять у зачеплення з ґрунтом, із зачеплення з ґрунтом, який був засіяний. UA 108531 C2 (12) UA 108531 C2 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 Представлений винахід стосується сільськогосподарських знарядь, а більш конкретно способу і пристрою для сповіщення оператора сільськогосподарського знаряддя в процесі активних посівних робіт, що сільськогосподарське знаряддя проходить раніше засіяну ділянку сільськогосподарського поля. Насіння, добрива, інокулянти і тому подібне звичайно вносять в сільськогосподарське поле або іншу підготовлену поверхню, використовуючи пневматичні рядові сівалки або аналогічні сільськогосподарські знаряддя. Традиційна пневматична рядова сівалка включає в себе візок з балонами стисненого повітря, який містить один або більше бункерів і дозуючих пристроїв для зберігання зернистого матеріалу і дозування зернистого матеріалу з бункерів для подальшої доставки в пневматичну культиваторну сівалку з анкерними сошниками або аналогічний пристрій для остаточного внесення в сільськогосподарське поле висівними секціями. Щоб іти в ногу із збільшенням розмірів полів, виробники пневматичних рядових сівалок розробляють і виготовляють пневматичні рядові сівалки, які мають більші бункери і пневматичні рядові сівалки з анкерними сошниками з більшим обхватом поля, тобто більшим числом висівних секцій. Чим більші пневматичні рядові сівалки з більшим обхватом поля за один прохід, тим важче стає обладнанню намагатися проводити сіяння/вносити добрива на меншій ділянці землі в межах більшої ділянки землі або ділянки землі з неправильною формою. У результаті, вартість, що витрачається на сіяння і внесення добрив, перевищує те, що необхідно для правильного сіяння і внесення добрив. Крім того, надмірне внесення добрив і/або надмірне сіяння на деякій площі є причиною вилягання сільськогосподарської культури і не дозрівання в належний час, викликаючи проблеми зі збиранням і втратою урожаю. Накопичувальний ефект від перекриття при здійсненні сіяння і внесенні добрив на невеликих ділянках на множині полів може перетворюватися в дуже значні витрати для фермера. Знаряддя попереднього рівня техніки прагнули виправити дану ситуацію за допомогою впровадження в рядову сівалку дозуючого пристрою, який може вносити певну кількість насіння на лінійну відстань. Однак, рішення попереднього рівня техніки не вирішили проблему того, що подвійне сіяння може статися, коли земля, яка засівається, дуже вузька або має неправильну форму для висівного пристрою. Крім того, рішення попереднього рівня техніки не вирішили проблему того, що навіть якщо дозатор був вимкнений, вхідні в зачеплення із землею сошники все-таки залишаються в зачепленні із землею і руйнують насіннєве ложе. Це є причиною руйнування ділянки, засіяної з перекриттям, вхідними в зачеплення із землею сошниками, що приводить до нерівномірного проростання, викликаючи подальші проблеми з низьким врожаєм і нерівномірним урожаєм в даних ділянках. Патент Канади 2503174 представляє пневматичну висівну систему з множиною відділень, де кожному відділенню виділений вибраний повітряний струмінь на основі об'єму або типу насіння і добрив, необхідних для конкретної сільськогосподарської культури. Наданий дозуючий вузол, який містить дозуючий корпус 80 для прийому насіннєвого матеріалу або добрив, а також висівну котушку для дозування матеріалу. Потім дозуючі комірки збирають матеріал для сіяння. Також надані відвідні пластини для переміщення вперед і назад з метою відкривання і закривання верхніх частин або передніх, або задніх комірок для матеріалу. Патент США № 5980163 додатково надає розподільний колектор для пневматичної рядової сівалки для дозування продукту. Крім того, він надає перепускні порти і порти Вентурі, при цьому порти Вентурі утворюють ряд портів, в які повинен вмішуватися продукт з продуктового резервуара, пов'язаного з первинним розподільним колектором. Перепускні порти утворюють залишкову частину рядів в первинному розподільному колекторі. Якщо порти Вентурі не утворюють верхній ряд портів в первинному розподільному колекторі, продукт з пов'язаного продуктового резервуара протікає через ряди перепускних портів доти, доки продукт не стикається з рядом портів Вентурі. Слідом за входом в порти Вентурі, продукт переноситься пневматичною розподільною системою в оброблену землю. Даний пристрій сприяє плавному протіканню дозованого продукту, а також наданню оператору можливості пристосування пневматичної розподільної системи до змінних конфігурацій. Хоча обидва пристрої, описані вище, з попереднього рівня техніки розкривають пневматичні рядові сівалки, які забезпечують можливість дозованого внесення насіння або добрив, жоден з пристроїв вище не розкриває пристрою, який здатний як вибірково блокувати частину дозатора, так і підіймати відповідні сошники, які входять в зачеплення із землею, відповідно, запобігаючи подвійному сіянню і руйнуванню насіннєвого ложа. Патент США № 7690440 розкриває пристрій, метою якого є подолання недоліків попереднього рівня техніки, описаних в згаданому вище патенті Канади і патенті США № 5980163. Конкретно, патент США № 7690440 описує сільськогосподарську рядову сівалку або машину для внесення добрив, яка має дозуючий пристрій, що розподіляє насіння або добрива 1 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 по множині елементів, які входять в зачеплення із землею. Подачу дозованого насіння або добрив в кожний з елементів, які входять в зачеплення із землею, регулюють через вхідний сигнал від навігаційної супутникової системи GPS/GNSS для запобігання доставці дозуючим пристроєм насіння або добрив у вибрані елементи, які входять в зачеплення із землею, які в іншому випадку потрапляли б у ґрунт, в який раніше були внесені насіння або добрива. Додатково надано підіймальний засіб, що реагує на вхідний сигнал з навігаційної супутникової системи GPS/GNSS, яка виявляє, що пристрій рухається або скоро почне рухатися через ділянки ґрунту, в які раніше були внесені насіння або добрива, для підняття вибраних елементів, які входять в зачеплення із землею, в які була припинена доставка насіння/добрива для того, щоб не турбувати ґрунт, в який раніше було внесено насіння або добрива. Будучи ефективною в запобіганні подвійному сіянню, система, описана в патенті США № 7690440, і аналогічні автоматизовані системи звільняють оператора знаряддя від керування системою дозування насіння і підіймання/опускання елементів, які входять в зачеплення із землею, коли автоматизована система визначає, на основі вхідних сигналів, які приймаються від навігаційної супутникової системи GPS/GNSS, що знаряддя проходить раніше засіяну землю. Незважаючи на те, що автоматизована система забезпечує гарантію проти подвійного сіяння або зчеплення дискового сошника із засіяною землею, деякі оператори можуть надавати перевагу тому, щоб дозуюча система і/або брус для навішування робочих органів, на якому встановлені дискові сошники, не були автоматично регульованими. Отже, існує потреба в системі, яка сповіщає оператора знаряддя, що знаряддя, або його частини, в'їжджають або виїжджають із зон з вже внесеним насінням або добривами, що забезпечує оператору можливість акуратно, але вручну керувати системою дозування насіння і/або брусом для навішування робочих органів для запобігання повторному внесенню насіння і/або добрив, а також забезпечує можливість не турбувати землю, в яку раніше було внесено насіння/добриво. Представлений винахід дає оператору систему сповіщення і попередження, яка подає оператору знаряддя сигнал, коли знаряддя, або його частини, проходять по землі з раніше внесеним насінням або добривами. Винахід забезпечує оператору можливість вручну ініціювати секційне керування висівною системою знаряддя і/або керування брусом для навішування робочих органів знаряддя для того, щоб не турбувати землю з раніше внесеним насінням або добривами. Є основи вважати, що винахід буде переважним для операторів, які віддають перевагу ручному, на відміну від автоматизованого, керуванню системою секційного керування знаряддя. Крім того, є основи вважати, що представлений винахід є менш складним, і відповідно менш дорогим, ніж повністю автоматизовані системи. Інші цілі, ознаки, аспекти і переваги винаходу стануть очевидні фахівцям в даній галузі з наступного докладного опису і супроводжуючих креслень. Однак, повинно бути зрозумілим, що докладний опис і конкретні приклади, вказуючи на переважні варіанти здійснення представленого винаходу, наведені як ілюстрація, а не обмеження. Численні зміни і модифікації можна зробити в межах об'єму домагань представленого винаходу без виходу за межі його суті, і винахід включає в себе всі подібні модифікації. Переважні ілюстративні варіанти здійснення винаходу проілюстровані на супроводжуючих кресленнях, на яких однакові позиційні позначення у всьому документі представляють однакові частини. На кресленнях: ФІГ. 1 являє собою вигляд спереду пристрою відключення дозатора згідно з одним варіантом здійснення представленого винаходу; ФІГ. 2 являє собою збільшене зображення пристрою відключення дозатора ФІГ. 1 в поперечному перерізі, зробленому по лінії В-В ФІГ. 1, яке показує відсікаючі затвори в закритому положенні; ФІГ. 3 являє собою вигляд спереду пристрою відключення дозатора представленого винаходу, аналогічного ФІГ. 1; ФІГ. 4 являє собою збільшене зображення пристрою відключення дозатора ФІГ. 3 в поперечному перерізі, зробленому по лінії В-В на ньому, яке показує відсікаючі затвори у відкритому положенні; ФІГ. 5 являє собою перспективне зображення знизу пристрою відключення дозатора представленого винаходу, яке включає в себе окремі відсікаючі затвори як у відкритому, так і в закритому положеннях; ФІГ. 6 являє собою перспективне зображення зверху пристрою відключення дозатора представленого винаходу, яке включає в себе окремі відсікаючі затвори як у відкритому, так і в закритому положеннях; 2 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 ФІГ. 7 являє собою вигляд спереду пристрою відключення дозатора представленого винаходу, який показує затвори як у відкритому, так і в закритому положеннях; ФІГ. 8 являє собою вигляд збоку пневматичного висівного пристрою представленого винаходу, який підтримує резервуар для добрив і насіннєвий резервуар, що показує місце установлення пристрою відключення дозатора; ФІГ. 9 являє собою вигляд зверху в плані пневматичного висівного пристрою представленого винаходу, який зображує розподільні трубопроводи, які відкриті для потоку добрив з пристрою відключення дозатора; ФІГ. 10 являє собою вигляд спереду пневматичного висівного пристрою представленого винаходу, який зображає сошники в опущеному положенні; ФІГ. 11 являє собою вигляд зверху в плані пневматичного висівного пристрою представленого винаходу, який зображує розподільні трубопроводи, які або відкриті (білі), або закриті (чорні) для потоку добрив і насіння з пристрою відключення дозатора; ФІГ. 12 являє собою вигляд спереду в плані пневматичного висівного пристрою, який зображує сошники як в опущеному, так і в піднятому положеннях; ФІГ. 13 являє собою вигляд збоку в поперечному перерізі землеробського знаряддя представленого винаходу, який показує сошники в опущеному положенні і шарнірно встановлені на традиційній рамі; ФІГ. 14 являє собою вигляд збоку в поперечному перерізі землеробського знаряддя представленого винаходу, з сошниками в опущеному положенні; ФІГ. 15 являє собою вигляд збоку в поперечному перерізі землеробського знаряддя представленого винаходу, з сошниками в піднятому положенні і шарнірно встановлених на традиційній рамі; ФІГ. 16 являє собою вигляд збоку в поперечному перерізі землеробського знаряддя представленого винаходу, з сошниками в піднятому положенні; ФІГ. 17 являє собою схему електричного ланцюга для керування пневматичним висівним пристроєм представленого винаходу, яка показує всі перемикачі у вимкненому положенні; ФІГ. 18 являє собою схему електричного ланцюга пристрою відключення дозатора представленого винаходу, яка показує перемикач 1 у ввімкненому положенні; ФІГ. 19 являє собою схему гідравлічного контуру для керування пристроєм відключення дозатора представленого винаходу, яка показує всі клапани у "вимкненому" положенні; ФІГ. 20 являє собою схему гідравлічного контуру для пристрою відключення дозатора представленого винаходу, яка показує клапани 1А і ЇВ у "ввімкненому" положенні, а залишок клапанів у "вимкненому" положенні; а ФІГ. 21 являє собою схематичне зображення пристрою секційного керування згідно з ще одним варіантом здійснення представленого винаходу. Представлений винахід, як відносно його організації, так і способу дії, можна найкращим чином зрозуміти за допомогою посилання на наступний опис і креслення, при цьому цифри використовуються протягом декількох зображень для позначення однакових деталей. Деякі деталі, які згадуються, можуть бути відсутніми на конкретних Фігурах внаслідок особливостей точки спостереження креслення або перешкоди з боку інших деталей. ФІГ. 1-20 являють собою декілька зображень пристрою відключення дозатора, в якому використовується технологія GPS/GNSS для автоматичного керування роботою пристрою відключення дозатора для уникання "подвійного внесення" насіння, добрив, гербіцидів, мікроелементів і тому подібного. Як стане очевидно з наступного опису, представлений винахід може бути реалізований з пристроєм, аналогічним пристрою, показаному на ФІГ. 1-20 або описаному в Патенті США № 7690440, розкриття якого включене в дану заявку, або з іншими відомими або розроблюваними основаними на GPS/GNSS системами секційного керування. Один варіант здійснення пристрою/вузла 35 секційного відключення дозатора проілюстрований на ФІГ. 1-8. Пристрій секційного відключення дозатора складається з рифленої або зубчастої висівної котушки 1 для кінцевого розподілу зернистого матеріалу, такого як насіння, в сільськогосподарське знаряддя. Висівна котушка 1 протягається по ширині дозуючого вузла 35. Висівна котушка 1 може бути виготовлена з множини матеріалів і мати множину рифлених або зубчастих конфігурацій для відповідності різним сільськогосподарським культурам, сіяння яких може потребуватися. Далі в даному документі термін "насіння" буде включати в себе будь-яку гранульовану або зернисту речовину, таку як насіння сільськогосподарської культури, добрива, мікроелементи, гербіциди, пестициди і тому подібне, а "сіяння" буде включати в себе внесення будь-якого гранульованого або зернистого матеріалу і відповідно не обмежений внесенням насіння сільськогосподарської культури на насіннєве ложе. При русі вперед пневматичної висівної системи 100 висівна котушка 1 обертається на ведучому 3 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 валу 2, що є причиною розподілу зернистого матеріалу, включаючи насіння і добрива, які підлягають розподілу з джерела 5 подання, що має насіннєвий резервуар 96 і резервуар 98 для добрив, із попередньо заданою нормою через випуски 27 у вузол 35а дозування добрив або вузол 35b дозування насіння і в розподільні трубопроводи 37 (див. ФІГ. 8) і в кінцевому результаті розподілу пневматичною розподільною системою 15, 18 через множину сошників 3, які входять в зачеплення із землею (ФІГ. 13-16) і в ґрунт. ФІГ. 1-7 ілюструють випуски 27. У полі, де земля з круглою формою або у вигляді довгих смуг залишається без внесеного насіння або добрив і/або є вужчою, ніж ширина машини для сіяння/внесення добрив, було б оптимально вимикати частину машини для сіяння/внесення добрив з метою сіяння/внесення добрив тільки в ті ділянки, в які не було внесене насіння/добриво, замість того, щоб надмірно вносити насіння/добрива або подвоєно вносити насіння/добрива в окрему ділянку і турбувати підстилаюче насіннєве ложе. Для здійснення цього, над висівною котушкою 1 встановлена множина затворів 4, які здатні переміщуватися в напрямках або вперед, або назад. У напрямку вперед кожний затвор 4 запобігає розподілу зернистого матеріалу в дану окрему секцію висівної котушки 1 і діє як перешкода, яка запобігає контакту зернистого матеріалу з висівною котушкою 1. В задньому положенні затвори 4 забезпечують можливість доступу зернистого матеріалу у висівну котушку 1. Вздовж осі 33 висівної котушки 1 знаходиться множина даних затворів 4 для того, щоб висівна котушка 1 могла бути розділена на секції, і окремі затвори 4 можуть бути зчеплені для надання іншої довжини пневматичної висівної системи, яка повинна бути заблокована для мети сіяння або внесення добрив. Передбачається, що крім затворів або в доповнення до них можна використовувати інші типи перешкоджаючих потоку пристроїв для вибіркової зупинки потоку насіння у вибрані ділянки висівної котушки. Як видно на ФІГ. 2 і 4, затвор 4 з'єднаний за допомогою різі з першим кінцем вала 7 над висівною котушкою 1. Вал 7 прикріплений з можливістю ковзання до внутрішньої поверхні заднього і верхнього кута бункера 5 пневматичної висівної системи. Крім того, другий кінець вала 7 прикріплений до електричного виконавчого механізму, гідравлічного циліндричного виконавчого механізму або електрогідравлічного виконавчого механізму 80 затвора дозатора. Крім того, кожний затвор 4 з'єднаний з можливістю ковзання з металевою пластиною 26, при цьому пластина 26 з'єднана з верхньою, задньою частиною бункера 5 пневматичної висівної системи за допомогою множини засобів, які можуть включати, але без обмеження, зварювання, паяння або прикріплення болтами. Металева пластина 26 служить як напрямна для затвора 4 для того, щоб положення пластини відносно затвора 4 правильно розташовувало затвор 4 поверх висівної котушки 1 при зчепленні валом 7. Крім того, при зачепленні валом 7, затвор 4 переміщується уперед для зачеплення протилежного кінця бункера 5 пневматичної висівної системи таким чином, щоб зернистий матеріал не міг пройти між затвором і бункером 5 пневматичної висівної системи. Коли не зачеплений валом 7, затвор 4 залишається в фіксованому положенні, прикріпленим до металевої пластини 26 з можливістю ковзання. У даному положенні, частинки можуть пройти між затвором 4 і бункером 5 пневматичної висівної системи і у висівну котушку 1, а потім в розподільні трубопроводи 37. З розподільних трубопроводів 37 зернистий матеріал буде в кінцевому результаті проходити у вхідні в зачеплення із землею сошники 3 землеробського знаряддя/пневматичного висівного пристрою 200 і в ґрунт. ФІГ. 5-7 показують вал 7, зчеплений іншим чином, для отримання при активації відкритого затвора 22 або закритого затвора 23. Кожний затвор 4 в ідеалі виготовлений із сталі або іншого прийнятного міцного металу. Знаходячись в передньому (закритому) положенні, затвор 23 повністю запобігає доступу у висівну котушку 1 будь-якої зернистої речовини, що вивільняється зверху висівної котушки 1. На ФІГ. 2 затвор 4 можна чітко побачити в його закритому положенні 23, що блокує всякий доступ зернистої речовини у висівну котушку 1. На ФІГ. 4 і ФІГ. 6 найкраще можна побачити відкриті затвори 22, в яких може виникати вільний потік зернистого матеріалу у висівну котушку 1. Електричний перемикач 101 в кабіні транспортного засобу (не показано), який тягне пневматичний висівний пристрій 200, функціонально пов'язаний з електричним виконавчим механізмом, гідравлічним виконавчим механізмом або електрогідравлічним виконавчим механізмом 80, який функціонально з'єднаний з другим кінцем вала 7, забезпечуючи оператору можливість керування пристроєм 35 секційного відключення дозатора, а більш конкретно, позначаючи, які затвори 4 необхідно відкрити, а які затвори 4 необхідно закрити, на основі інформації у оператора, в який ґрунт необхідно вносити насіння/добрива, а який необхідно залишити неторканим. ФІГ. 17 показує схему електричного ланцюга 120 для керування пневматичним висівним пристроєм 200 представленого винаходу, яка містить множину перемикачів 101 для керування відповідними електричними котушками 102, які відповідно 4 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 керують відповідними гідравлічними клапанами 202 для керування гідравлічним циліндричним виконавчим механізмом 80 і, відповідно, затворами 4 на пристрої 35 відключення дозатора (див. ФІГ. 19), і подібні перемикачі 101 додатково керують котушками 104, які відповідно керують гідравлічними клапанами 112 для керування гідравлічними циліндрами 12 для підняття і опускання відповідних вузлів 202 важелів сошників із зачеплення з ґрунтом. ФІГ. 18 являє собою електричну схему, аналогічну ФІГ. 17, при цьому обидві Фігури показують електричний ланцюг 120 для керування пневматичним висівним пристроєм 200, який містить множину перемикачів 101 для керування відповідними електричними котушками 102. Електричні котушки 102 відповідно керують відповідними гідравлічними клапанами 111 для керування затворами 4 на пристрої 35 відключення дозатора (див. ФІГ. 19 і 20). Перемикачі 101 ФІГ. 17 і 18 додатково і одночасно керують котушками 104, які відповідно керують гідравлічними клапанами 112 для керування гідравлічними циліндрами 12 для підняття і опускання відповідних вузлів 202 важелів сошників із зачеплення з ґрунтом. У зв'язку з цим, ФІГ. 20 показує гідравлічні циліндри 12 стояків для груп вузлів 202 важелів сошників (див. "вежі" 1А і 1В) в робочому положенні для того, щоб привести відповідні вузли 202 сошників в підняте положення. Інші гідравлічні циліндри 12 для інших стояків башт 2А, 3А, 4А, 5А, 6А, 7А і 8А, і 2В, 3В, 4В, 5В, 6В, 7В, і 8В показані в положенні для здійснення опускання відповідних вузлів 202 важелів сошників. У електричному ланцюгу 120, показаному на ФІГ. 17, всі перемикачі 101 (наприклад, sw 1-4) показані у "вимкненому" положенні. Це спричиняє відкривання відповідних гідравлічних клапанів 112 і за допомогою цього примушує відповідні гідравлічні виконавчі механізми 80, які керують дозуючими затворами4 пристроїв 35а, 35b відключення дозаторів, приводити в рух затвори 4, щоб вони були в "закритому" положенні, і відповідно керувати гідравлічними клапанами 112, щоб вони примушували гідравлічні циліндри 12 опускати вузли 202 важелів сошників для зчеплення з ґрунтом (див. ФІГ. 19 і ФІГ. 16). У електричному ланцюгу 120, показаному на ФІГ. 18, sw 1 показаний у "ввімкненому" положенні, а залишки перемикачів sw 2-4 показані у "вимкненому" положенні. Як видно на ФІГ. 18 і 20, завдяки sw 1, який знаходиться у "ввімкненому" положенні, відповідна котушка 102 (котушка 1А) активує клапан 111 відключення дозатора, який відповідно активує гідравлічний виконавчий механізм 80 затвора дозатора для того, щоб закривати затвор 4 дозатора. Одночасно, перемикач 101 (sw) активує котушку 108 (котушку 1В) для того, щоб активувати гідравлічні клапани 112 (див. ФІГ. 20) (клапан 1В), що, в свою чергу, приводить в дію гідравлічні циліндри 12 стояків для вузла 202 важеля сошника (циліндри 1А, 1В стояків), для того, щоб примушувати гідравлічні циліндри 12 стояків підіймати вузол 202 важеля сошника в підняте положення, як показано на ФІГ. 15, і в положення 91 на ФІГ. 12. ФІГ. 8-12 показують сільськогосподарський пристрій, обладнаний дозатором 35а насіння і дозатором 35b добрив. До кожного дозатора 35а, 35b множина розподільних трубопроводів 37 приєднані таким чином, щоб окремий затвор 4 всередині дозатора 35а, 35b відповідав окремому розподільному трубопроводу 37. Кожний розподільний трубопровід на своєму іншому кінці також з'єднаний з додатковою розподільною головкою 74. Кожний сільськогосподарський пристрій 200 має множину додаткових розподільних головок 74. Кожна додаткова розподільна головка 74 має множину з'єднань з шлангами 82 для насіння або зі шлангами 84 для добрив. Крім того, кожна додаткова розподільна головка 74 з'єднана на своєму іншому кінці з відповідною трубкою/шлангом 18 для насіння і шлангом/трубкою 15 для добрив (див. ФІГ. 9). Внаслідок того, що додаткова розподільна головка 74 має множину з'єднань з трубкою/шлангом 18 для насіння або шлангами/трубкою 15 для добрив, кожний затвор 4 відсікача 35а, b дозатора може вибірково відкривати або закривати подання насіння або добрив у відповідну множину шлангів 18 для насіння (у разі пристрою 35а відключення дозатора насіння) і у безліч трубок/шлангів 15 для добрив (у разі відсікача 35b дозатора добрив). На ФІГ. 9 всі розподільні трубопроводи (білі) зображують шланги 82, 84 для насіння і добрив відповідно, які відкриваються для потоку добрив множиною затворів 4 в дозаторі 35а насіння, і дозаторі 35b добрив, відповідно. Відповідно, на ФІГ. 10, всі сільськогосподарські знаряддя 200 знаходяться в опущеному положенні, щоб забезпечити можливість внесення добрив в ґрунт. Чорні розподільні трубопроводи на ФІГ. 11 зображують шланги 82 для насіння і шланги 84 для добрив, відсікаючи потік добрив за допомогою множини затворів 4 у відповідних дозаторах 35а, b, а білі розподільні трубопроводи зображують шланги 82 для насіння і шланги 84 для добрив, відкриті для потоку насіння і добрив за допомогою множини затворів 4 у відповідних дозаторах 35а, b насіння і добрив. У зв'язку з цим, множина вузлів 202 важелів сошників буде мати розподілені в них насіння і добрива, а множина вузлів 202 важелів сошників не будуть мати розподілені в них добрива або насіння. 5 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 ФІГ. 12 зображає групу вузлів 202 важелів сошників у піднятому положенні 91 для того, щоб вони не турбували ґрунт. Шланги 84 для добрив і відповідні трубки/шланги 15 для добрив, і аналогічним чином шланги 82 для насіння і відповідні шланги/трубки 18 для насіння, всі пов'язані з вузлами 202 важелів сошників, які знаходяться в піднятому положенні 91, закриті для потоку насіння/добрива. Інші вузли 202 важелів сошників показані в опущеному положенні 93, а пов'язані з ними трубки/шланги 15 для добрив і трубки /шланги 18 для насіння забезпечуються добривами і насінням, забезпечуючи можливість роботи залишку діючих вузлів 202 важелів сошників, показаних в опущеному положенні 93. Крім того, в ще одному варіанті здійснення використовується спрямовуюча система (не показана) GPS (Глобальна Система Позиціонування) або GNSS (Глобальна Навігаційна Супутникова Система) для автоматичного зчеплення електричного виконавчого механізму, гідравлічного виконавчого механізму або електрогідравлічного циліндричного виконавчого механізму 80 і вала 7 для закривання або відкривання затворів 4 у відкрите або закрите положення на основі попередніх даних, які визначають, де насіння або добрива були раніше розміщені в ґрунті, забезпечуючи, щоб не сталося подвійногосіяння/внесення добрив або надмірного сіяння/внесення добрив. У одному варіанті здійснення, як видно на ФІГ. 13-16, землеробське знаряддя 200 складається з важеля 11 сошника, шарнірно встановленого на шарнірному з'єднанні 6 з поперечним елементом 9, який фіксовано встановлений на традиційній рамі 92. Традиційна рама 92 функціонально з'єднана з множиною коліс 94, які входять в зачеплення із землею. Кронштейн 10 установки важеля сошника фіксовано встановлений за допомогою поперечного елемента 9 на традиційну раму 92. Важіль, який гідравлічно висувається 45, який містить змішувальний гідравлічний силовий циліндр 12, шарнірно з'єднаний на одному своєму кінці 8 з кронштейном 10 установки важеля сошника, на іншому кінці 20 з важелем 31 сошника таким чином, щоб зміщувальний гідравлічний силовий циліндр 12 розташовувався по суті паралельно і під важелем 11 сошника, як показано на ФІГ. 16. Перший встановлювальний елемент 31 шарнірно з'єднаний з важелем 11 сошника на шарнірному з'єднанні 21 таким чином, щоб встановлювальний елемент 31 знаходився під і приблизно перпендикулярно в робочому (в зачепленні з ґрунтом) положенні до важеля 11 сошника. Гідравлічний силовий циліндр 12 може висуватися, примушуючи встановлювальний елемент 31 повертатися назад, а будучи повернутим таким чином, контактувати з важелем 11 сошника, примушуючи важіль 11 сошника повертатися навколо шарнірного з'єднання 6 для того, щоб ставати піднятим, підіймаючи за допомогою цього важіль 11 сошника, який прикочує коток 19, перший встановлювальний елемент 31 (далі збірно вузол 202 важеля сошника) із зачеплення із землею. Перший встановлювальний кронштейн 31 жорстко з'єднаний з першим встановлювальним елементом 13 системи доставки. Встановлювальний елемент 13 першої системи доставки містить перший різальний ніж 14, а також шланг/трубку 15 для доставки першого продукту (наприклад, добрива) (звичайно для доставки добрива) позаду першого різального ножа 14. Дистально до встановлювального елемента 13 першої системи доставки знаходиться встановлювальний елемент 16 другої системи доставки, приєднаний під і до другого встановлювального елемента 32. Другий встановлювальний елемент 32 фіксовано з'єднаний в точці 24 з подовжувачем 29 встановлювального важеля. Штифт 33 і множина болтів 34 також регульовано з'єднують другий встановлювальний елемент 32 з важелем 11 сошника. Штифт і множина отворів забезпечують можливість вертикального регулювання встановлювального елемента 16 другої системи доставки. Встановлювальний елемент 16 другої системи доставки в більшості випадків є перпендикулярним важелю 11 сошника. Подовжувач 29 встановлювального важеля жорстко з'єднаний з важелем 11 сошника двома фіксованими болтами 30. Друга система доставки містить другий різальний ніж 17, а також трубку/шланг 18 для доставки другого продукту (наприклад, насіння) (звичайно для доставки насіння) позаду другого різального ножа 17. Елементи 13, 16 як першої, так і другої системи доставки, відповідно, збірно називаються сошниками 3, які входять в зачеплення із землею. Ланковий ланцюг 25 з'єднує перший і другий сошники 3, які входять в зачеплення із землею, і обмежує рух вперед першого сошника, що входить в зачеплення із землею. Вхідний в зачеплення із землею прикочувальний коток 19 з'єднаний з дистальним кінцем другого встановлювального кронштейна 32. Прикочувальний коток 19 йде за встановлювальними елементами 13, 16 двох систем доставки і забезпечує можливість ущільнення ґрунту над матеріалом, який був введений в борозенки, створені в ґрунті. Змішувальний гідравлічний силовий циліндр 12 шарнірно з'єднаний як з встановлювальним елементом 10 рами, так і з першим встановлювальним кронштейном 31, щоб мати можливість зачеплення встановлювального елемента 13 першої системи доставки. Коли гідравлічний 6 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 силовий циліндр 12 висувається, верхня кромка встановлювального елемента 13 першої системи доставки зачіплює передню кромку 28 подовжувача 29 встановлювального важеля. Потім подовжувач 29 встановлювального важеля підіймається, відповідно підіймаючи прикріплений встановлювальний елемент 16 другої системи доставки, другий шарнірний кронштейн 32 і прикочувальний коток 19. Передня кромка 28 подовжувача 29 встановлювального важеля досить товста для підтримування маси встановлювального елемента 16 другої системи доставки, також як другого шарнірного кронштейна 32 і котка 19 в піднятому положенні з метою транспортування. Зворотне перемикання гідравлічного силового циліндра 12 за допомогою активації гідравлічних клапанів 212 стояків є причиною опускання відповідного вузла 202 важеля сошника. ФІГ. 15 і 16 ілюструють землеробське знаряддя 200, яке має вузли 202 важелів сошників в піднятому положенні для транспортування. Це забезпечує можливість приведення в рух землеробського знаряддя 200 по полю, яке було засіяне раніше, не турбуючи насіннєве ложе. Змішувальним гідравлічним силовим циліндром 12 керують за допомогою численних електричних і/або гідравлічних клапанів 112 (див. ФІГ. 9 і 20). Це надає оператору можливість вибірково підіймати або єдиний, або множину вузлів 202 важелів сошників з кабіни транспортного засобу. Також передбачається виконання землеробського знаряддя 200 таким чином, щоб воно містило тільки множину одиничних сошників 3, які входять в зачеплення із землею, і відповідні шланги/трубки 18 для доставки продукту і різальні ножі 17 таким чином, щоб землеробське знаряддя 200 тільки доставляло насіння або добрива. У одному варіанті здійснення система 250 керування GPS ("Глобальна Система Позиціонування") або GNSS ("Глобальна навігаційна супутникова система"), показана загалом на ФІГ. 21, надана для автоматичного керування відкриванням і закриванням затворів 4 пристроїв 35а, 35b відключення дозаторів, а також підняттям і опусканням вузлів 202 важелів сошників для землеробського знаряддя 200. У альтернативному варіанті здійснення система 250 керування використовує інформацію, засновану на GPS/GNSS, для візуального і/або звукового попередження оператора знаряддя, що знаряддя входить у вже засіяні секції або зони поля або виходить з них. На відміну від автоматизованого варіанту здійснення, описаного вище, в даному варіанті здійснення, візуальне або звукове попередження використовується для інформування оператора, що необхідно активувати вибрані пристрої відключення дозаторів для ефективного "відключення" дозування насіння або іншого гранульованого матеріалу для уникання повторного внесення матеріалу в раніше засіяні ділянки. З іншого боку, попередження можна використовувати для інформування оператора знаряддя з метою підняття вибраних секцій бруса для навішування робочих органів знаряддя для виведення даних вибраних секцій із зачеплення з полем для того, щоб не турбувати раніше засіяний ґрунт. Застосування звукових і/або візуальних попереджень з повністю автоматизованою системою надає оператору керування секційною системою керування і може бути реалізоване менш дорогим і складним чином, ніж повністю автоматизована система, описана в даному документі. У одному варіанті здійснення система 250 керування GPS забезпечує можливість автоматичного керування не тільки котушками 102 для керування клапанами 111 дозаторів, які, в свою чергу, приводять в дію/керують гідравлічними циліндричними виконавчими механізмами 80 і, відповідно, пов'язаними з ними затворами 4 на пристроях 35а, 35b відключення дозаторів, але також керує котушками 104 для гідравлічних клапанів 112 стояків, які, в свою чергу, керують змішувальними гідравлічними силовими циліндрами 12 на вузлах 202 важелів сошників для підняття вибраних вузлів 202 важелів сошників для ділянок, які картовані з використанням системи GPS і про які відомо, що вони вже були засіяні, щоб відповідно не турбувати вже засіяне насіннєве ложе. Система 250 керування звичайно складається з блоку 252 обробки даних, який може взаємодіяти з різними зовнішніми системами, такими як віддалений комп'ютер 254, за допомогою карти 256 пам'яті. Карта 255 пам'яті може використовуватися для передавання інформації між віддаленим комп'ютером 254 і блоком 252 обробки даних. Дана інформація може містити дані, які забезпечують керування різними системами знаряддя. Наприклад, інформація може використовуватися для введення типу насіння, норми витрати насіння, типу і норми внесення добрив, типу і норми витрати гербіциду і т. д., тобто використовуватися для забезпечення електронного керування дозуючими системами. Також інформація може містити географічні карти поля, на якому проводиться сіяння, для надання оператору знаряддя навігаційного зворотного зв'язку в реальному часі по мірі проходження знаряддям поля. Повинно бути зрозуміло, що карта 255 пам'яті може приймати множину видів і включає в себе 7 UA 108531 C2 5 10 15 20 25 30 35 40 45 50 55 60 жорсткі диски, компакт-диски, доступні тільки для зчитування, гнучкі дискети, а також бездротові передачі/передачі даних Bluetooth. Блок 252 обробки даних відомим чином взаємодіє з операторським інтерфейсом 256. Операторський інтерфейс 256 може включати в себе, наприклад, графічний інтерфейс (GUI) користувача 258, який забезпечує керування курсором, наприклад, за допомогою мишки або джойстика. Операторський інтерфейс 256 може додатково містити клавіатуру 260 або інші пристрої вводу-виводу. Блок 252 обробки даних генерує сигнали індикації, які подаються в дисплей 262 з перебудовуваною конфігурацією, який може стосуватися варіанту з ЕЛТ або з плоским екраном. Дисплей 262 може включати рідкокристалічний дисплей на активній матриці, який допускає відображення буквено-цифрових символів, графічних даних і повномасштабного відео з рядом кольорів в умовах змінного зовнішнього освітлення. Серед іншого, дисплей 262 використовується для відображення конфігурації знаряддя 26 і висівних секцій 96 на ньому, даних про внесений продукт (наприклад, даних про стан, про рекомендації по внесенню і про керування), і положення знаряддя 26 в реальному часі відносно топографічної або географічної карти. Блок 252 обробки даних, інтерфейс 256 і дисплей 262 переважно розташовані в кабіні оператора знаряддя або буксирувального трактора. Блок 252 обробки даних також взаємодіє з ланцюгом генерування сигналу місцеположення, показаним під номером 264 пунктирним контуром, який генерує сигнали місцеположення, які відображають положення трактора 20. Ланцюг 264 містить приймач 266 глобальної системи позиціонування (GPS) з пов'язаною з ним антеною 268 і приймач 270 диференціальної GPS (DGPS) з пов'язаною з ним антеною 272. Замість антен можна використати єдину антену. Приймачі GPS можуть бути відомого типу або конструкції. Приймач 266 GPS визначає координати довготи і широти і висоту над рівнем моря транспортного засобу 20 із сигналів, які передаються системою супутників GPS. Точність даних положення покращується за рахунок застосування коригувальних сигналів, які приймаються приймачем 270 DGPS. Диференціальні коригувальні сигнали використовуються для коригування погрішностей сигналів GPS, включаючи сигнал помилки селективної доступності, який додається до сигналів GPS урядом СІЛА. Коригувальні сигнали DGPS передаються береговою охороною США і/або комерційними службами. З положення антени 266 GPS і антени 268 DGPS, блок 252 обробки даних може виводити географічні положення кожної з висівних секцій 96 за допомогою визначення напрямку руху 28 (ФІГ. 1) і додавання х/у зміщення для кожної з висівних секцій. Напрямок руху 28 може бути отриманий від гірокомпаса 274. Як альтернатива, напрямок руху 28 можна визначити за допомогою перевірки останньої отриманої точки з ланцюга 264 генерування сигналу місцеположення і порівняння її з поточною точкою місцеположення. Повинно бути зрозуміло, що ланцюг генератора сигналу місцеположення характерний для одного типу ланцюга, який може бути використаний, і в зв'язку з цим, для визначення даних положення в реальному часі трактора і/або знаряддя можна використовувати інші конфігурації і/або типи ланцюга. Як відмічалося вище, в одному варіанті здійснення винаходу інформація місцеположення використовується для сповіщення оператора знаряддя, що знаряддя проходить по раніше засіяному і/або потривоженому ґрунту. Потім дана інформація може бути використана оператором для керування вручну роботою дозуючої системи і/або зчеплення або розчеплення вибраних секцій бруса для навішування робочих органів з ґрунтом. У одному варіанті здійснення, дане "сповіщення" приймає вигляд візуального індикатора, який відображається на дисплеї 262. Візуальний індикатор може бути у вигляді загального сповіщення або, переважно, представлений у вигляді зміни в графічному зображенні знаряддя. Наприклад, якби блок 252 обробки даних з інформації місцеположення визначив, що частина знаряддя проходить по раніше засіяному і/або розораному ґрунту, блок 252 обробки даних згенерував би і передав сигнали індикації для дисплея 262, які спричинили б освітлення дисплея 262, зміну кольору і/або висвітлення відповідних секцій графічного дисплея знаряддя, які були визначені, як такі, що проходять по раніше засіяному і/або потривоженому ґрунту. Крім того, блок 252 обробки даних може інформувати оператора про активацію відключаючих вузлів для того, щоб відповідні секції знаряддя не дозували насіння. У додатковому варіанті здійснення, блок 252 обробки даних може викликати звучання попереджувального сигналу, коли знаряддя проходить по раніше засіяному і/або потривоженому ґрунту. У даному варіанті здійснення звучання попереджувального сигналу буде сповіщати оператора, що траєкторію руху знаряддя необхідно перевірити. Блок 252 обробки даних може містити звукову карту 276, яка генерує звукові сигнали, які передаються в один або більше динаміків 280 і оброблюються ними, для звукового сповіщення оператора. Динаміки 280 8 UA 108531 C2 5 10 15 20 25 переважно розташовані в кабіні оператора. Звуковий сигнал може звучати окремо або в комбінації з візуальним сигналом, описаним вище. Відповідно потрібно мати на увазі, що представлений винахід надає систему і спосіб, за допомогою яких відбувається візуальне і/або звукове сповіщення оператора знаряддя, що знаряддя проходить по раніше засіяному і/або потривоженому ґрунту, для надання оператору можливості ручного керування вузлами дозування/внесення насіння. Інформація, яка передається оператору, переважно конкретно ідентифікує, які ділянки знаряддя проходять по раніше засіяному ґрунту. Дана конкретність надає оператору можливість грамотно визначати, як керувати вузлами дозування/внесення насіння, наприклад, активувати вибрані відключаючі дозування насіння клапани і/або підіймати вибрані частини бруса для навішування робочих органів знаряддя. У переважному варіанті здійснення блок 252 обробки даних містить програмне забезпечення, яке відстежує відповідь оператора на вказівку, що знаряддя проходить раніше засіяний ґрунт і зберігає попереджувальний сигнал доти, доки оператор не зробить коригувальну дію, або за допомогою регулювання процесу сіяння належним чином, або за допомогою зміни положення знаряддя. У переважному варіанті здійснення блок 252 обробки даних визначає, або автоматично, або за вхідним сигналом від оператора, що знаряддя знаходиться в стані сіяння або стані транспортування. Коли знаряддя знаходиться в стані сіяння, блок 252 обробки даних відстежує рух знаряддя і порівнює положення знаряддя в реальному часі з рухом, що відстежується. Однак, коли знаряддя знаходиться в стані транспортування, блок 252 обробки даних може або сповіщати оператора, коли знаряддя звернуло із заздалегідь визначеної траєкторії транспортування, або переходить в режим очікування доти, доки знаряддя не повернеться в стан сіяння. Як відмічалося вище, дані умови можуть визначатися автоматично із зворотного зв'язку, який отримується від різних датчиків на знарядді, або безпосередньо із вхідного сигналу від оператора. Множина змін і модифікацій до винаходу можуть бути зроблені без виходу за межі його суті. Об'єм даних змін стане очевидний з прикладеної формули винаходу. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Землеробське знаряддя для внесення зернистої речовини в ґрунт, яке містить: сівалку, яка має множину інструментів, які входять у зачеплення з ґрунтом, які можуть пересуватися між піднятим положенням і опущеним положенням, при цьому інструменти, які входять у зачеплення з ґрунтом, виконані з можливістю виходу із зачеплення з ґрунтом, перебуваючи в піднятому положенні, і виконані з можливістю входу в зачеплення з ґрунтом, перебуваючи в опущеному положенні; навігаційну супутникову систему, яка картує рух знаряддя, коли інструменти, які входять у зачеплення з ґрунтом, знаходяться в опущеному положенні, і подає вихідний сигнал, коли знаряддя проходить ділянку ґрунту, яка вже була засіяна; прилад сповіщення, який вмикається, коли навігаційна супутникова система подає вихідний сигнал, при цьому прилад сповіщення виконаний з можливістю сповіщення оператора, що згадане знаряддя в даний момент проходить ділянку ґрунту, яка була засіяна зернистою речовиною, без автоматичного регулювання внесення зернистої речовини в згадану ділянку ґрунту, яка раніше була засіяна зернистою речовиною, для сповіщення оператора знаряддя, що щонайменше один з множини інструментів, які входять у зачеплення з ґрунтом, необхідно перемістити в підняте положення; і контролер, який зберігає ввімкнення приладу сповіщення доти, поки оператор не прийме коригувальні заходи для виведення інструментів, які входять у зачеплення з ґрунтом, із зачеплення з ґрунтом, який був засіяний. 2. Землеробське знаряддя за п. 1, в якому прилад сповіщення включає в себе світловий прилад, який освітлюється, коли навігаційна супутникова система подає вихідний сигнал. 3. Землеробське знаряддя за п. 1, в якому сповіщення являє собою попереджувальний сигнал, який звучить, коли навігаційна супутникова система подає вихідний сигнал. 4. Землеробське знаряддя за п. 1, в якому прилад сповіщення розташований всередині кабіни оператора знаряддя. 5. Землеробське знаряддя за п. 1, яке додатково містить пневматичний візок, з'єднаний з сівалкою і виконаний з можливістю подачі зернистої речовини в сівалку. 6. Землеробське знаряддя за п. 1, в якому навігаційна супутникова система являє собою глобальну супутникову навігаційну систему визначення місцеположення. 9 UA 108531 C2 5 10 15 20 25 30 7. Землеробське знаряддя за п. 1, в якому контролер зберігає ввімкненя приладу сповіщення доти, поки оператор не перемістить інструменти, які входять у зачеплення з ґрунтом, в підняте положення. 8. Землеробське знаряддя для введення матеріалу в ґрунт, в якому матеріалом є насіння, добрива або насіння і добрива, яке містить: вузол рами, який включає в себе центральну раму і множину витягнутих встановлюваних важелів, встановлених на центральній рамі, при цьому кожен виконаний з можливістю переміщення з піднятого положення в опущене положення, і засоби, які входять у зачеплення з ґрунтом, встановлені на кожному зі встановлюваних важелів і виконані з можливістю входження в зачеплення із ґрунтом, коли кожен зі встановлюваних важелів знаходиться в опущеному положенні; засіб підіймання і опускання вузла рами між піднятим положенням і опущеним положенням; і засіб попередження оператора згаданого знаряддя, з'єднаний з навігаційною супутниковою системою, для сповіщення згаданого оператора, що навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні, при цьому засіб попередження повідомляє оператора, що згадане знаряддя в даний момент проходить ділянку ґрунту, яка була засіяна зернистою речовиною, без автоматичного регулювання внесення зернистої речовини в згадану ділянку ґрунту, яка раніше була засіяна зернистою речовиною, і повідомляє оператора знаряддя вручну активувати засіб підіймання і опускання для підняття вузла рами з опущеного положення в підняте положення. 9. Землеробське знаряддя за п. 8, в якому засіб сповіщення включає в себе звукове сповіщення, яке звучить, коли навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні. 10. Землеробське знаряддя за п. 8, в якому засіб сповіщення включає в себе один або більше світлових приладів, які освітлюються, коли навігаційна супутникова система визначила, що частина вузла рами проходить ділянки ґрунту, які раніше були засіяні. 11. Землеробське знаряддя за п. 8, в якому засіб сповіщення розташований всередині кабіни оператора знаряддя. 12. Землеробське знаряддя за п. 8, яке додатково містить пневматичний візок, з'єднаний з вузлом рами і виконаний з можливістю подачі зернистої речовини в засіб дозування матеріалу. 10 UA 108531 C2 11 UA 108531 C2 12 UA 108531 C2 13 UA 108531 C2 14 UA 108531 C2 15 UA 108531 C2 16 UA 108531 C2 17 UA 108531 C2 18 UA 108531 C2 19 UA 108531 C2 20 UA 108531 C2 Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 21
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for signaling to an operator of a farm implement that the farm implement is traversing a seeded area
Автори англійськоюKowalchuk, Trevor L.
Автори російськоюКовальчук Трэвор Л.
МПК / Мітки
МПК: A01C 7/06, G01S 19/00, A01C 7/08
Мітки: землеробське, пристроєм, проходить, сигналу, знаряддя, подання, засіяну, ділянку, оператору
Код посилання
<a href="https://ua.patents.su/23-108531-zemlerobske-znaryaddya-z-pristroehm-dlya-podannya-signalu-operatoru-shho-znaryaddya-prokhodit-zasiyanu-dilyanku.html" target="_blank" rel="follow" title="База патентів України">Землеробське знаряддя з пристроєм для подання сигналу оператору, що знаряддя проходить засіяну ділянку</a>
Дорожньо-транспортний засіб з пристроєм для аварійного припинення подання палива до двигуна

Номер патенту: 22659
Опубліковано: 25.04.2007
Автор: Бутко Володимир Іванович
МПК: F02D 17/00
Мітки: подання, засіб, аварійного, пристроєм, двигуна, припинення, палива, дорожньо-транспортний
Формула / Реферат:
Дорожньо-транспортний засіб з пристроєм для аварійного припинення подання палива до двигуна, що містить двигун внутрішнього згоряння, систему електропостачання з акумуляторною батареєю, паливну систему з паливним баком, підкачувальними насосами та паливними трубопроводами високого і низького тиску та золотниковий клапан з корпусом, вбудованим у паливний трубопровід, з підпружиненим поршнем, здатним зворотно-поступально пересуватись усередині...
Пристрій для розпилення рідких добрив грунтообробного знаряддя
Номер патенту: 46648
Опубліковано: 15.09.2004
Автор: Гузь Віталій Григорович
МПК: A01C 23/00, A01C 3/00
Мітки: пристрій, грунтообробного, розпилення, рідких, добрив, знаряддя
Формула / Реферат:
Пристрій для розпилення рідких добрив грунтообробного знаряддя, що містить ємність для рідких комплексних добрив і гербіцидів, систему нагнітання і дозування, розпилювачі, який відрізняється тим, що на задній рамі грунтообробного знаряддя на кронштейнах розміщений відбивний лоток з закріпленими на ньому розпилювачами рідких добрив, розташованими по всьому фронту лотка, причому відбивний лоток виконаний з можливістю регулювання в залежності...
Пристрій для подання сигналу електричним дзвоником глухій людині з зовнішніх дверей квартири
Номер патенту: 51543
Опубліковано: 15.11.2002
Автори: Антонюк Павло Дмитрович, Блиндюк Петро Михайлович, Рибчинський Юхим Борисович, Лаптєв Анатолій Іванович
МПК: H03K 12/00
Мітки: глухій, зовнішніх, людини, сигналу, подання, електричним, дзвоником, пристрій, квартирі, дверей
Формула / Реферат:
Пристрій для подання сигналу електричним дзвоником глухій людині з зовнішніх дверей квартири, що містить джерело низької постійної напруги та електромагнітний вібратор, який відрізняється тим, що кнопка керування з’єднана з фазним проводом електромережі, загальний вихід якої з’єднано з електричним дзвоником та фазним входом джерела напруги, нульовий вихід джерела напруги та вихід дзвоника з'єднані з нульовим проводом електромережі, вихід...
Ґрунтообробне знаряддя
Номер патенту: 41114
Опубліковано: 12.05.2009
Автори: Катюха Денис Анатолійович, Катюха Ігор Анатолійович
МПК: A01B 33/00
Мітки: ґрунтообробне, знаряддя
Формула / Реферат:
1. Ґрунтообробне знаряддя, що містить раму з закріпленими на ній плоскорізальними лапами, позаду яких розташований горизонтальний вал, з'єднаний з редуктором, встановленим на рамі, яке відрізняється тим, що на валу перпендикулярно його осі закріплені нерухомо бичі.2. Ґрунтообробне знаряддя за п. 1, яке відрізняється тим, що бичі мають круглий переріз.3. Ґрунтообробне знаряддя за п. 1, яке відрізняється тим, що бичі виконані...
Сільськогосподарське знаряддя і спосіб експлуатації сільськогосподарського знаряддя
Номер патенту: 90855
Опубліковано: 10.06.2010
Автор: Маєр Бредлі Дж
МПК: B65G 67/02, A61C 7/00
Мітки: сільськогосподарського, сільськогосподарське, знаряддя, спосіб, експлуатації
Формула / Реферат:
1. Сільськогосподарське знаряддя, що містить раму, щонайменше один бак для матеріалу, установлений на рамі щонайменше перший важіль, з'єднаний з можливістю повороту з рамою, транспортер, з'єднаний з щонайменше першим важелем для транспортування матеріалу, і гідравлічну позиційну систему, з'єднану з транспортером, для переміщення транспортера в щонайменше двох напрямках в вибране одне з багатьох заданих положень, яке відрізняється тим, що...
Попередній патент: Спосіб і пристрій наддуву паливного бака ракети-носія високотемпературним газом, що генерується у внутрішньобаковому просторі
Наступний патент: Антибактеріальний засіб на основі 6-аміногексанової кислоти (варіанти)
Випадковий патент: Спосіб виділення антигенів із збудника бактеріального опіку плодових