Автоматизована платформна система гравіметричного скринінгу і спосіб
Номер патенту: 113171
Опубліковано: 26.12.2016
Автори: Свортвуд Трой М., Келлер Дуглас, Голгоутью Керсті А., Дональдсон Джеффрі Д., Ерве Філіпп
Формула / Реферат
1. Система для регулювання вологості ґрунту у множини горшкових рослин, при цьому система містить:
стаціонарну платформу, яка має множину отворів, утворених в ній, при цьому отвори розташовані на платформі у множині рядів;
множину посудин, розташованих у множині отворів в платформі, при цьому посудини підтримуються платформою;
рухомий нижній портал, розташований під платформою, при цьому рухомий нижній портал підтримує множину динамометричних модулів, вирівняних з множиною посудин, розташованих в ряду отворів, причому кожний динамометричний модуль містить тензодатчик, який має опору, здатну пересуватися з втягнутого положення, відділеного проміжком від нижньої поверхні посудини, у висунуте положення, в якому опора тензодатчика підіймає посудину вгору для підтримки на ній маси посудини, при цьому тензодатчик зважує підняту посудину;
контролер, з'єднаний з тензодатчиком, при цьому контролер запрограмований визначати, чи мають потребу посудини в наборі води залежно від маси посудин; і
водопровід, з'єднаний з динамометричним модулем, при цьому водопровід містить щонайменше один клапан регулювання потоку, керований контролером, для вибіркової подачі води через динамометричний модуль в посудину.
2. Система за п. 1, яка додатково містить верхній портал, який пересувається над платформою, при цьому верхній портал містить щонайменше один датчик, розташований на ньому, для отримання даних, пов'язаних з рослинами у множині посудин.
3. Система за п. 2, в якій щонайменше один датчик на верхньому порталі містить камеру для отримання зображень рослин у множині посудин.
4. Система за п. 2, в якій щонайменше один датчик на верхньому порталі являє собою температурний датчик.
5. Система за п. 4, в якій температурним датчиком є інфрачервона камера.
6. Система за п. 2, в якій верхній портал містить привідний механізм, який пересуває щонайменше один датчик на верхньому порталі назад і вперед зверху рядів посудин, розташованих всередині отворів платформи.
7. Система за п. 2, в якій верхній портал містить перший і другий розділені проміжком човникові елементи, з'єднані з розділеними проміжком верхніми напрямними, розташованими на протилежних сторонах платформи, для надавання можливості переміщення верхнього порталу зверху платформи, першу і другу рознесені вертикальні опори, з'єднані з першим і другим човниковими елементами відповідно, і горизонтальну опору, яка простягається зверху платформи між першою і другою рознесеними вертикальними опорами верхнього порталу, при цьому з горизонтальною опорою верхнього порталу з'єднаний щонайменше один датчик.
8. Система за п. 1, в якій нижній портал містить перший і другий розділені проміжком човникові елементи, з'єднані з розділеними проміжком нижніми напрямними, розташованими на протилежних сторонах платформи, для надавання можливості переміщення нижнього порталу під платформою, першу і другу рознесені вертикальні опори, з'єднані з першим і другим човниковими елементами відповідно, і горизонтальну опору, яка простягається під платформою між першою і другою рознесеними вертикальними опорами нижнього порталу, при цьому з горизонтальною опорою нижнього порталу з'єднана множина динамометричних модулів.
9. Система за п. 8, в якій горизонтальна опора нижнього порталу підтримує трубопровід подачі текучого середовища, з'єднаний з динамометричними модулями, для вибіркового висунення і втягування опор динамометричних модулів, і трубопровід подачі води, з'єднаний з динамометричними модулями, для подачі води в посудини через динамометричні модулі.
10. Система за п. 9, в якій опори динамометричних модулів містять отвір в рідинному сполученні з трубопроводом подачі води, і в якій кожна з множини посудин містить резервуар для текучого середовища, який має заливний отвір, розташований на нижній поверхні посудини, і зворотний клапан, з'єднаний із заливним отвором, для надавання можливості надходження води, яка подається через отвір опори динамометричного модуля, в заливний отвір посудини через зворотний клапан.
11. Система за п. 10, в якій резервуар для текучого середовища кожної посудини містить нижню частину в сполученні із заливним отвором і множину вертикально розташованих каналів для текучого середовища для подачі води в ґрунт всередині посудини.
12. Система за п. 11, яка додатково містить сітку, яка утворює внутрішню частину вертикально розташованих каналів для текучого середовища, при цьому сітка забезпечує можливість протікання води через сітку в ґрунт, але запобігає нагромадженню ґрунтового сміття і коріння рослин у каналах, які вертикально проходять, для текучого середовища резервуара.
13. Система за п. 11, яка додатково містить переливний отвір в сполученні з кожним з каналів для текучого середовища, при цьому переливні отвори розташовані біля верхнього кінця посудини.
14. Система за п. 10, в якій заливні отвори посудин зміщені від центральної осі посудин і в якій кожна посудина містить вирівнюючу лапку, виконану з можливістю розташування всередині вирізаної ділянки отвору, утвореної в платформі, для вирівнювання заливного отвору посудини з водопровідним отвором в опорі динамометричного модуля.
15. Система за п. 10, яка додатково містить прокладку, розташовану на опорі кожного динамометричного модуля, при цьому прокладка покращує герметичність між заливним отвором посудини і водопровідним отвором, утвореним в опорі динамометричного модуля.
16. Система за п. 15, в якій прокладка містить отвір, вирівняний з водопровідним отвором в опорі динамометричного модуля.
17. Система за п. 16, в якій опора динамометричного модуля містить множину штирів, виконаних з можливістю вирівнювання прокладки на опорі.
18. Система за п. 1, в якій опора динамометричного модуля містить вирізану ділянку, виконану з можливістю відведення текучого середовища з опори.
19. Система за п. 1, в якій кожний динамометричний модуль містить циліндр і поршень, розташований в циліндрі, при цьому поршень з'єднаний з тензодатчиком і може пересуватися між втягнутим положенням і висуненим положенням для пересування тензодатчика і опори з втягнутого положення, відділеного проміжком від нижньої поверхні посудини, у висунуте положення, в якому опора тензодатчика підіймає посудину вгору для підтримки на ній маси посудини.
20. Система за п. 1, в якій кожна посудина містить корпусну частину, яка має циліндричну форму, і фланець, розташований на верхньому кінці посудини, при цьому фланець виконаний з можливістю зачеплення платформи, коли корпусну частину посудини вставляють в отвір в платформі для підтримки посудини на платформі.
21. Система за п. 1, яка додатково містить завантажувальну платформу, рухому відносно стаціонарної платформи, при цьому завантажувальна платформа містить щонайменше одну складану панель, виконану з можливістю розташування над множиною рядів отворів платформи для полегшення завантаження посудин в отвори, які розташовані поруч зі складаною панеллю.
22. Система за п. 1, в якій водопровід з'єднаний з динамометричним модулем за допомогою першого і другого клапанів регулювання потоку, при цьому перший клапан регулювання потоку має швидкість потоку текучого середовища, більшу, ніж у другого клапана регулювання потоку, і в якій контролер спочатку відкриває перший і другий клапани регулювання потоку для початку наповнення посудин, причому контролер закриває перший клапан регулювання потоку, коли маса посудин наближається до бажаної, і завершує наповнення посудини з другим клапаном регулювання потоку для точного регулювання кількості води, яка додається в посудину.
23. Спосіб регулювання вологості ґрунту у множини горшкових рослин, при цьому спосіб включає:
надавання стаціонарної платформи, яка має множину отворів в ній;
розташування множини посудин в отворах платформи, при цьому посудини підтримуються платформою;
підняття посудин з множиною динамометричних модулів;
зважування кожної з множини посудин динамометричними модулями;
визначення, чи мають потребу посудини в наборі води залежно від маси посудин;
зрошування посудин через динамометричні модулі, якщо необхідно, залежно від стадії визначення; і
опускання множини динамометричних модулів таким чином, щоб множина посудин підтримувалася платформою.
24. Спосіб за п. 23, в якому отвори в платформі розташовані у множині рядів, на стадії пересування множини динамометричних модулів під платформою динамометричні модулі вирівнюються з рядом посудин, а на стадії підйому посудин ряд посудин підіймається повністю одночасно з множиною динамометричних модулів.
25. Спосіб за п. 24, який додатково включає пересування динамометричних модулів до наступного ряду посудин і виконання стадій підйому, зважування, визначення, зрошування і опускання для наступного ряду посудин.
26. Спосіб за п. 23, який додатково включає пересування щонайменше одного датчика зверху рядів посудин для збору даних, пов'язаних з рослинами.
27. Посудина для використання у системі для регулювання вологості ґрунту у множини горшкових рослин, при цьому система містить стаціонарну платформу, яка має множину утворених в ній отворів, при цьому посудина містить:
корпусну частину, яка має відкритий верхній кінець і нижній кінець;
фланець, з'єднаний з корпусною частиною поруч з верхнім кінцем, при цьому фланець виконаний з можливістю зачеплення платформи для утримання корпусної частини всередині отвору платформи;
резервуар для текучого середовища, який має нижню частину, розташовану поруч з нижнім кінцем корпусної частини, множину вертикально розташованих каналів для текучого середовища, які простягаються вгору в напрямку верхнього кінця корпусної частини, і заливний отвір, розташований в нижньому кінці корпусної частини в сполученні з нижньою частиною резервуара для текучого середовища; і
зворотний клапан, з'єднаний із заливним отвором для надавання текучого середовища, яке підлягає подачі в резервуар для текучого середовища з нижнього кінця корпусної частини через заливний отвір і зворотний клапан.
28. Посудина за п. 27, яка додатково містить сітку, яка утворює внутрішню частину вертикально розташованих каналів для текучого середовища, при цьому сітка забезпечує можливість протікання текучого середовища через сітку в ґрунт всередині корпусної частини, але запобігає нагромадженню ґрунтового сміття і коріння рослин у вертикально розташованих каналах для текучого середовища резервуара.
29. Посудина за п. 27, яка додатково містить переливний отвір в сполученні з кожним з каналів для текучого середовища, при цьому переливні отвори розташовані біля верхнього кінця корпусної частини.
30. Посудина за п. 27, в якій заливні отвори зміщені від центральної осі корпусної частини і яка додатково містить вирівнюючу лапку, розташовану біля верхнього кінця корпусної частини, при цьому вирівнююча лапка виконана з можливістю розташування всередині вирізаної ділянки отвору, утвореної в платформі, для вирівнювання заливного отвору з водопроводом.
Текст
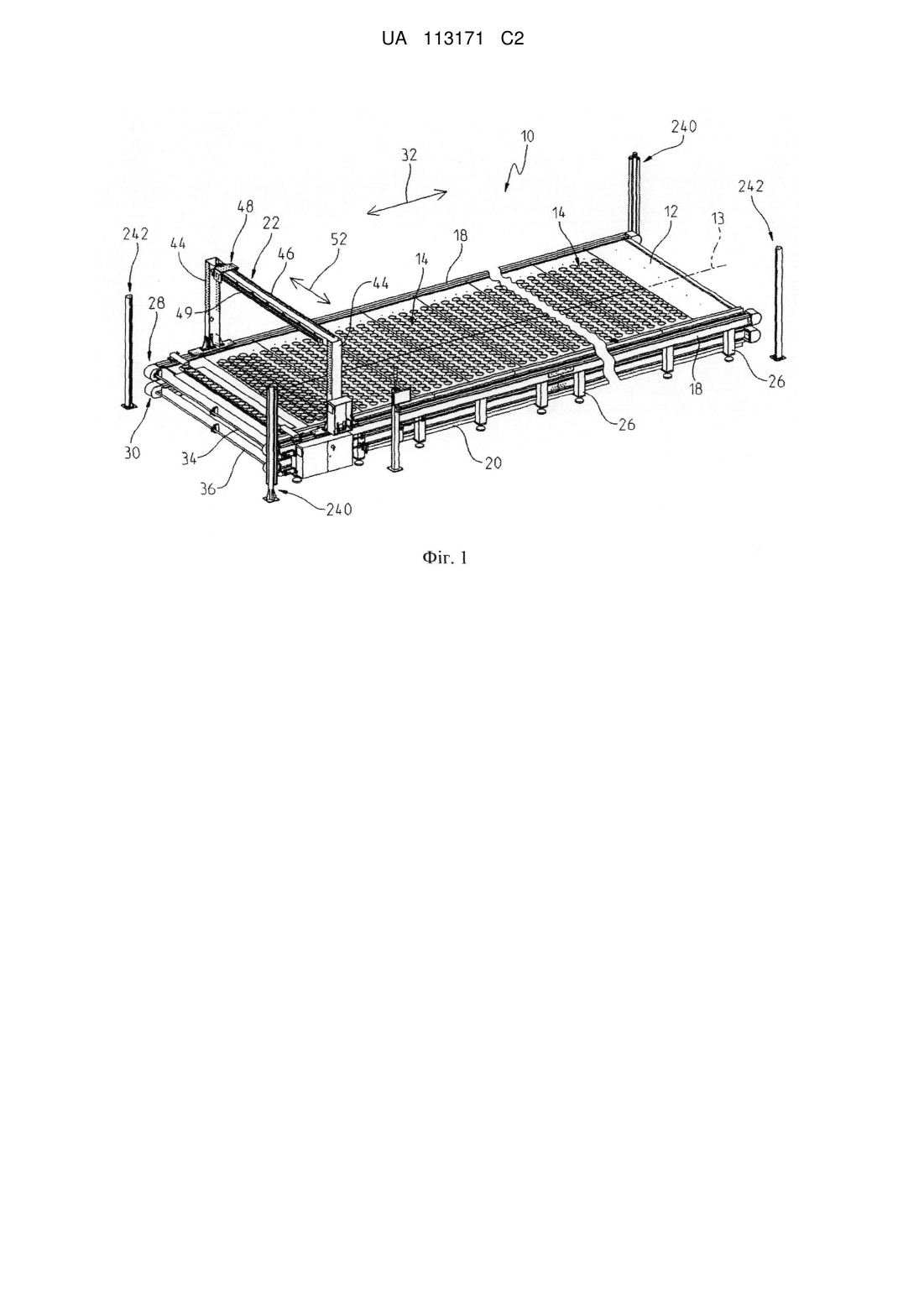
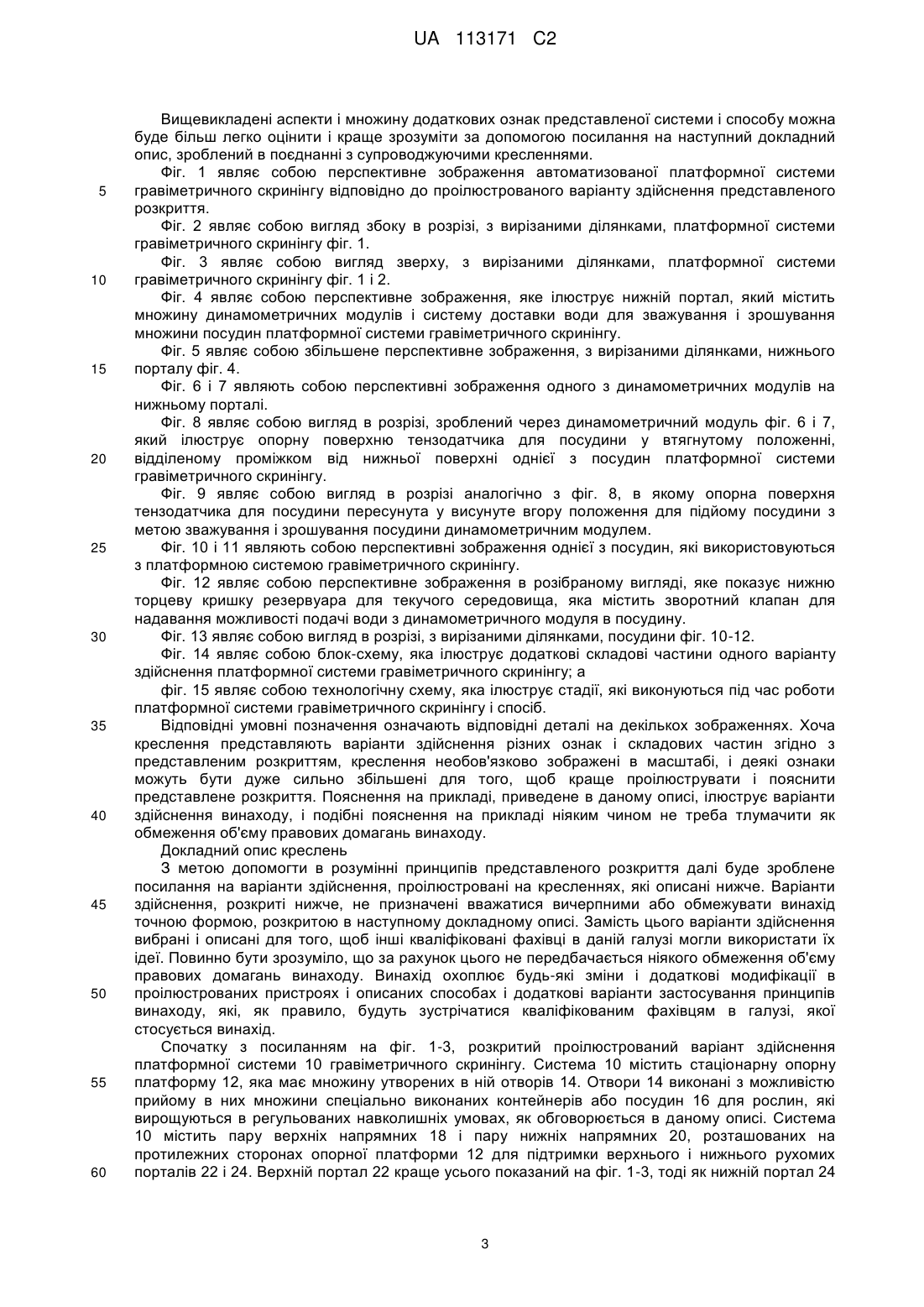
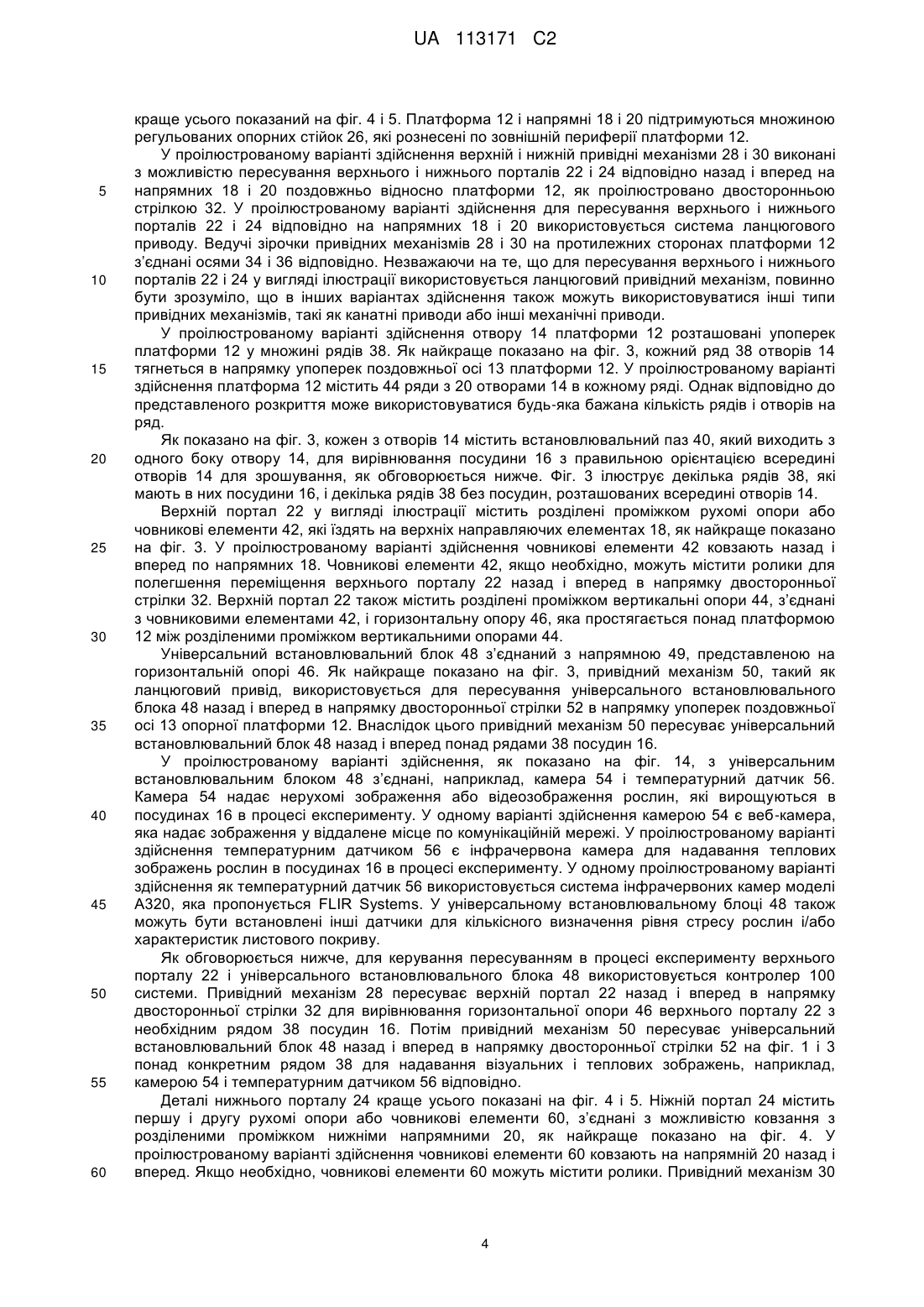
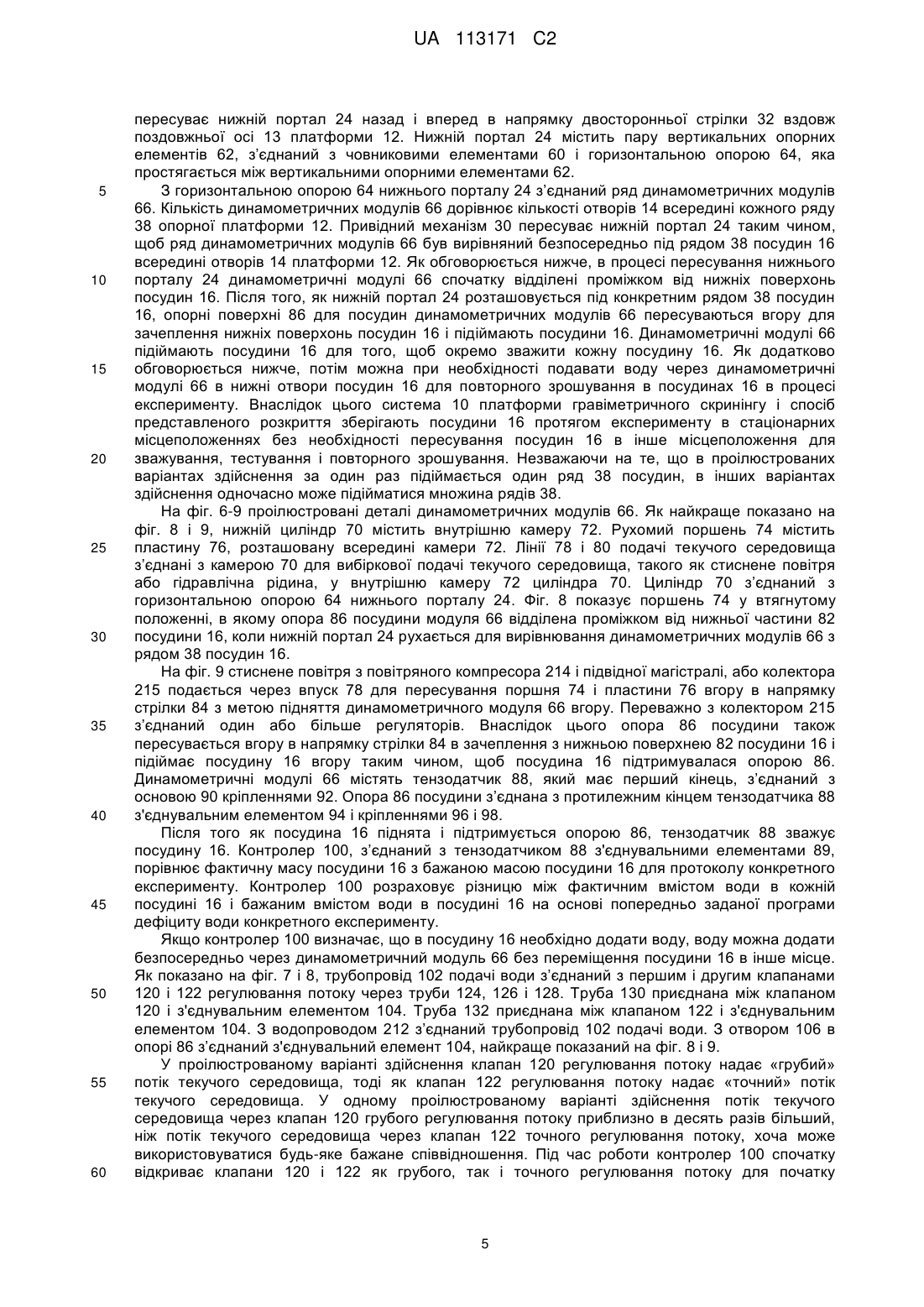
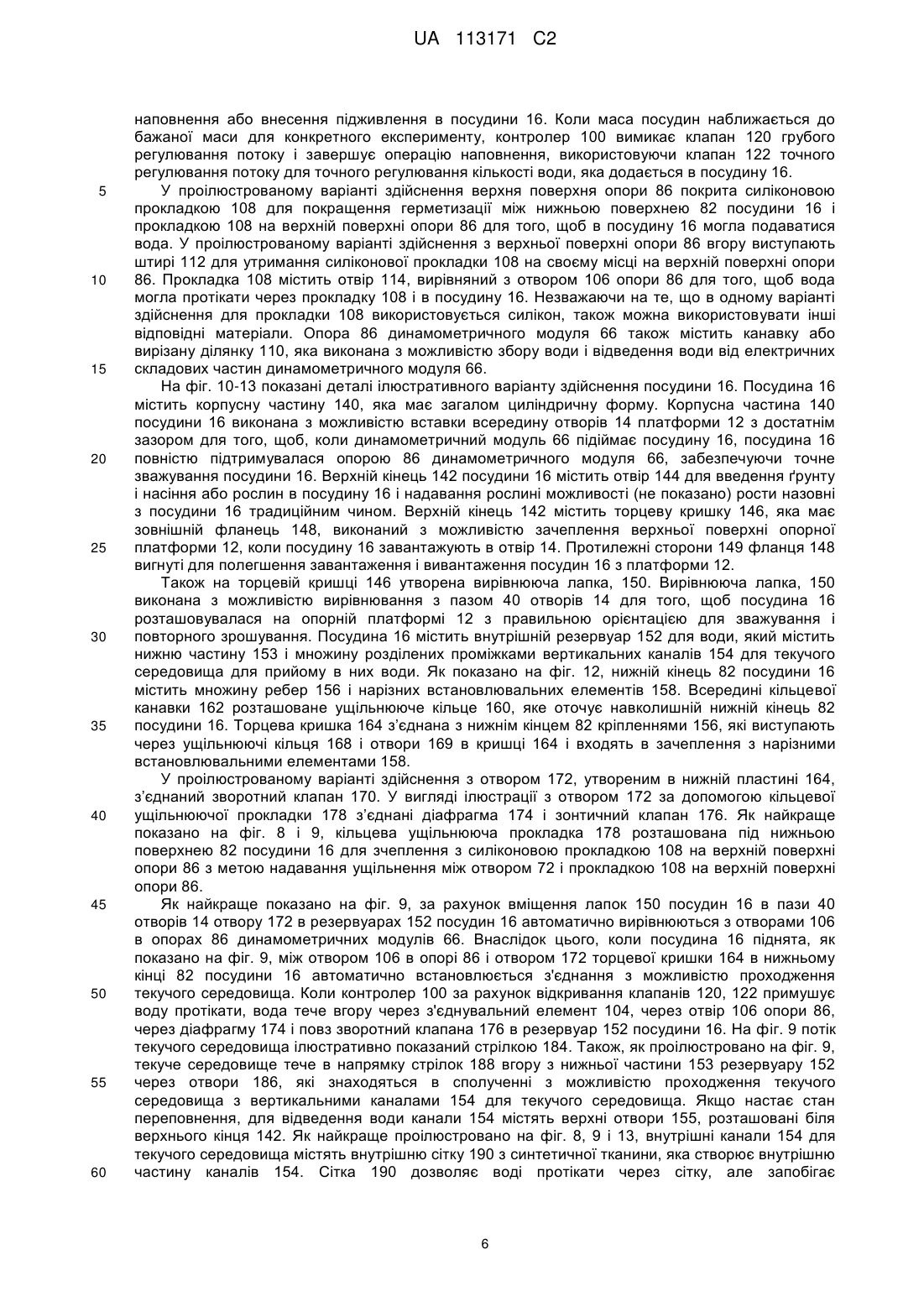
Реферат: Автоматизована система (10) гравіметричного скринінгу і спосіб керування вологістю ґрунту у множини горшкових рослин (16) для проведення експериментів по браку води в теплиці з використанням стаціонарної опорної платформи (12) і конструкції посудини, які зберігають рослини в нерухомому положенні в процесі тестування. За допомогою зважування і повторного зрошування посудин з-під платформи представлена система і спосіб дозволяють верхньому порталу (22) робити зображення високого розрізнення, збирати дані про температуру або дані від інших датчиків для кількісного визначення рівня стресу рослин або характеристик листового покриву рослин в процесі експерименту. UA 113171 C2 (12) UA 113171 C2 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 Рівень техніки і суть розкриття Представлене розкриття стосується системи і способу надавання регульованих умов зволоження ґрунту для горшкових рослин в великомасштабній, автоматизованій гравіметричній скринінговій системі, як правило, розташованій в теплиці. Гравіметричний метод являє собою відому методику застосування режиму точного стресу, який викликається засухою, до рослин, які вирощуються в контейнерах або посудинах, за допомогою вимірювання змін маси посудини. Вимірювання маси посудини забезпечує точний розрахунок змін вологості ґрунту, а значення заповнення води визначають шляхом підрахунку різниці між фактичним вмістом води і бажаним вмістом води на основі заздалегідь заданої програми дефіциту води. При відповідному регулюванні втрати води з ґрунту за рахунок випаровування гравіметричний метод надає можливість визначення транспірації рослин і загального використання рослинами води протягом експерименту. Звичайно гравіметричний скринінг являє собою трудомісткий інтенсивний процес, який обмежує продуктивність і пропускну здатність в спеціальних скринінгових програмах. Загальноприйняті скринінгові системи пересувають окремі посудини до місця зважування і повторного зрошування. У деяких випадках блоки рослин цілком пересувають як єдине ціле в інше місце для вимірювань маси і повторного зрошування. Дане переміщення привносить в методики тестування додаткові спотворюючі ефекти, такі як, наприклад, вібрації в процесі пересування і умови низької щільності зростання, які не характерні для польових умов. Дані відомі гравіметричні скринінгові системи не забезпечують найбільш ефективне використання тепличного простору. Автоматизована гравіметрична скринінгова система і спосіб представленого розкриття надають високопродуктивну тепличну скринінгову систему, яка використовує опорну платформу і конструкцію посудини, які зберігають рослини в нерухомому положенні в процесі тестування. Система містить нижній портал, розташований під опорною платформою, який має множину незалежних динамометричних модулів і водопровідну систему для зважування і подачі води в кожний ряд посудин. У проілюстрованому варіанті здійснення кожний ряд посудин одночасно підіймається динамометричними модулями для отримання маси, розрахунку, скільки води необхідно додати для доведення посудини до необхідної маси, а потім подачі води в посудину на основі розрахунку. Нижній портал вирівнюється з кожним рядом посудин по мірі того, як він рухається вздовж довжини опорної платформи. У вигляді ілюстрації весь ряд посудин одночасно зважується і повторно зрошується за лічені хвилини без переміщення посудин в окреме місце зважування. За рахунок зважування і повторного зрошування посудин з-під платформи представлена система і спосіб забезпечують можливість високошвидкісному автоматизованому верхньому порталу робити зображення високого дозволу, збирати дані про температуру або дані інших датчиків для кількісного визначення рівня стресу рослин або характеристик листового пологу рослин в процесі експерименту. Представлені система і спосіб забезпечують знижений шум і більш рівномірні і точно регульовані навколишні умови водного стресу для груп експерименту як з хорошим поливом, так і із засухою. Покращене регулювання робить можливим порівняння виміряних фізіологічних параметрів з більшою достовірністю, оскільки водний стрес є однаковим і рівномірним по всьому експерименту. У вигляді ілюстрації платформна і портальна системи використовують виготовлену за індивідуальним замовленням посудину, виконану з можливістю роботи з нижнім порталом, розташованим під опорною платформою для зважування і повторного зрошування посудин. Проілюстровані посудини забезпечують можливість повторного зрошування з-під поверхні ґрунту. У вигляді ілюстрації кожна посудина містить систему резервуарів, виконану з можливістю утримування в ній води. Система резервуарів оточує стовп ґрунту, утворений посудиною, від місця безпосередньо під верхньою поверхнею ґрунту до дна посудини. Проілюстрований варіант здійснення забезпечує рідинне сполучення системи резервуарів з ґрунтом, надане за рахунок множини вертикальних каналів для текучого середовища, які простягаються вздовж внутрішньої окружності посудини. У проілюстрованому варіанті здійснення канали покриває сітка з синтетичної тканини для запобігання нагромадженню в каналах резервуара коріння і сміття. У вигляді ілюстрації вода і/або поживні речовини доставляються в резервуар через динамометричний модуль і через зворотний клапан, розташований на дні посудини. При контакті з опорною поверхнею динамометричного модуля ущільнююче кільце на посудині утворює ущільнення навколо зворотного клапана для зменшення втрати води. Посудини доставляють точні кількості води в стовп ґрунту, і результатом цього є здоровий рослинний матеріал з прийнятним ростом і розвитком. 1 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 У одному проілюстрованому варіанті здійснення представленого розкриття надана система для регулювання вологості ґрунту у множині горшкових рослин для проведення експериментів за браком води. Система містить стаціонарну платформу, яка має множину утворених в ній отворів. Отвори на платформі розташовані у множині рядів. Система також містить множину посудин, розташованих у множині отворів в платформі. Посудини підтримуються платформою. Рухомий нижній портал розташовується під платформою. Рухомий нижній портал підтримує множину динамометричних модулів, вирівняних з множиною посудин, розташованих в ряді отворів. Кожний динамометричний модуль містить тензодатчик, який має опору, здатну пересуватися з втягнутого положення, відділеного проміжком від нижньої поверхні посудини, у висунуте положення, в якому опора тензодатчика підіймає посудину вгору для підтримки на ній маси посудини таким чином, щоб тензодатчик зважував підняту посудину. Система додатково містить контролер, з’єднаний з тензодатчиком. Контролер запрограмований визначати, чи мають потребу посудини в зрошуванні на основі маси посудин і експерименту по браку води. Також система додатково містить водопровід, з’єднаний з динамометричним модулем. Водопровід містить щонайменше один клапан регулювання потоку, керований контролером, для вибіркової подачі води через динамометричний модуль в посудину. У проілюстрованому варіанті здійснення система додатково містить верхній портал, який пересувається над платформою, при цьому верхній портал містить щонайменше один розташований на ньому датчик для отримання даних, пов'язаних з рослинами, у множині посудин. У вигляді ілюстрації датчиком є камера для отримання зображень рослин у множині посудин, температурний датчик або інший датчик. У ще одному проілюстрованому варіанті здійснення представленого розкриття, наданий спосіб регулювання вологості ґрунту у множині горшкових рослин для проведення експериментів по браку води. Спосіб включає надавання стаціонарної платформи, яка має множину отворів в ній, і розташування множини посудин в отворах платформи. Посудини підтримуються платформою. Спосіб також включає підняття посудин з множиною динамометричних модулів, зважування кожної з множини посудин динамометричними модулями, визначення, чи мають потребу посудини в зрошуванні на основі маси посудин і експерименту по браку води, зрошування посудин через динамометричні модулі, якщо необхідно, на початку стадії визначення, і опускання множини динамометричних модулів таким чином, щоб множина посудин підтримувалася платформою. У проілюстрованому варіанті здійснення отвори в платформі розташовані у множині рядів. На стадії пересування множини динамометричних модулів під платформою динамометричні модулі вирівнюються з рядом посудин, а на стадії підйому посудин весь ряд посудин підіймається одночасно з множиною динамометричних модулів. Спосіб також включає пересування динамометричних модулів до наступного ряду посудин і виконання стадій підйому, зважування, визначення, зрошування і опускання для наступного ряду посудин. У ще одному проілюстрованому варіанті здійснення представленого розкриття, надана посудина для використання з системою для регулювання вологості ґрунту у множині горшкових рослин для проведення експериментів по браку води. Система містить стаціонарну платформу, яка має множину утворених в ній отворів. Посудина містить корпусну частину, яка має відкритий верхній кінець і нижній кінець, і фланець, з’єднаний з корпусною частиною поруч з верхнім кінцем. Фланець виконаний з можливістю зачеплення платформи для утримування корпусної частини всередині отвору платформи. Посудина також містить резервуар для текучого середовища, який має нижню частину, яка розташована поруч з нижнім кінцем корпусної частини, множину вертикально розташованих каналів для текучого середовища, які простягаються вгору в напрямку верхнього кінця корпусної частини, і заливний отвір, розташований в нижньому кінці корпусної частини в поєднанні з нижньою частиною резервуара для текучого середовища. Посудина додатково містить зворотний клапан, з’єднаний із заливним отвором для надавання текучого середовища, яке підлягає подачі в резервуар для текучого середовища з нижнього кінця корпусної частини через заливний отвір і зворотний клапан. У проілюстрованому варіанті здійснення посудина містить сітку, яка утворює внутрішню частину вертикально розташованих каналів для текучого середовища. Сітка забезпечує можливість протікання текучого середовища через сітку в ґрунт всередині корпусної частини, але запобігає нагромадженню ґрунтового сміття і коріння рослин у каналах, які вертикально проходять, для текучого середовища резервуара. Короткий опис креслень 2 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 60 Вищевикладені аспекти і множину додаткових ознак представленої системи і способу можна буде більш легко оцінити і краще зрозуміти за допомогою посилання на наступний докладний опис, зроблений в поєднанні з супроводжуючими кресленнями. Фіг. 1 являє собою перспективне зображення автоматизованої платформної системи гравіметричного скринінгу відповідно до проілюстрованого варіанту здійснення представленого розкриття. Фіг. 2 являє собою вигляд збоку в розрізі, з вирізаними ділянками, платформної системи гравіметричного скринінгу фіг. 1. Фіг. 3 являє собою вигляд зверху, з вирізаними ділянками, платформної системи гравіметричного скринінгу фіг. 1 і 2. Фіг. 4 являє собою перспективне зображення, яке ілюструє нижній портал, який містить множину динамометричних модулів і систему доставки води для зважування і зрошування множини посудин платформної системи гравіметричного скринінгу. Фіг. 5 являє собою збільшене перспективне зображення, з вирізаними ділянками, нижнього порталу фіг. 4. Фіг. 6 і 7 являють собою перспективні зображення одного з динамометричних модулів на нижньому порталі. Фіг. 8 являє собою вигляд в розрізі, зроблений через динамометричний модуль фіг. 6 і 7, який ілюструє опорну поверхню тензодатчика для посудини у втягнутому положенні, відділеному проміжком від нижньої поверхні однієї з посудин платформної системи гравіметричного скринінгу. Фіг. 9 являє собою вигляд в розрізі аналогічно з фіг. 8, в якому опорна поверхня тензодатчика для посудини пересунута у висунуте вгору положення для підйому посудини з метою зважування і зрошування посудини динамометричним модулем. Фіг. 10 і 11 являють собою перспективні зображення однієї з посудин, які використовуються з платформною системою гравіметричного скринінгу. Фіг. 12 являє собою перспективне зображення в розібраному вигляді, яке показує нижню торцеву кришку резервуара для текучого середовища, яка містить зворотний клапан для надавання можливості подачі води з динамометричного модуля в посудину. Фіг. 13 являє собою вигляд в розрізі, з вирізаними ділянками, посудини фіг. 10-12. Фіг. 14 являє собою блок-схему, яка ілюструє додаткові складові частини одного варіанту здійснення платформної системи гравіметричного скринінгу; а фіг. 15 являє собою технологічну схему, яка ілюструє стадії, які виконуються під час роботи платформної системи гравіметричного скринінгу і спосіб. Відповідні умовні позначення означають відповідні деталі на декількох зображеннях. Хоча креслення представляють варіанти здійснення різних ознак і складових частин згідно з представленим розкриттям, креслення необов'язково зображені в масштабі, і деякі ознаки можуть бути дуже сильно збільшені для того, щоб краще проілюструвати і пояснити представлене розкриття. Пояснення на прикладі, приведене в даному описі, ілюструє варіанти здійснення винаходу, і подібні пояснення на прикладі ніяким чином не треба тлумачити як обмеження об'єму правових домагань винаходу. Докладний опис креслень Зметою допомогти в розумінні принципів представленого розкриття далі буде зроблене посилання на варіанти здійснення, проілюстровані на кресленнях, які описані нижче. Варіанти здійснення, розкриті нижче, не призначені вважатися вичерпними або обмежувати винахід точною формою, розкритою в наступному докладному описі. Замість цього варіанти здійснення вибрані і описані для того, щоб інші кваліфіковані фахівці в даній галузі могли використати їх ідеї. Повинно бути зрозуміло, що за рахунок цього не передбачається ніякого обмеження об'єму правових домагань винаходу. Винахід охоплює будь-які зміни і додаткові модифікації в проілюстрованих пристроях і описаних способах і додаткові варіанти застосування принципів винаходу, які, як правило, будуть зустрічатися кваліфікованим фахівцям в галузі, якої стосується винахід. Спочатку з посиланням на фіг. 1-3, розкритий проілюстрований варіант здійснення платформної системи 10 гравіметричного скринінгу. Система 10 містить стаціонарну опорну платформу 12, яка має множину утворених в ній отворів 14. Отвори 14 виконані з можливістю прийому в них множини спеціально виконаних контейнерів або посудин 16 для рослин, які вирощуються в регульованих навколишніх умовах, як обговорюється в даному описі. Система 10 містить пару верхніх напрямних 18 і пару нижніх напрямних 20, розташованих на протилежних сторонах опорної платформи 12 для підтримки верхнього і нижнього рухомих порталів 22 і 24. Верхній портал 22 краще усього показаний на фіг. 1-3, тоді як нижній портал 24 3 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 60 краще усього показаний на фіг. 4 і 5. Платформа 12 і напрямні 18 і 20 підтримуються множиною регульованих опорних стійок 26, які рознесені по зовнішній периферії платформи 12. У проілюстрованому варіанті здійснення верхній і нижній привідні механізми 28 і 30 виконані з можливістю пересування верхнього і нижнього порталів 22 і 24 відповідно назад і вперед на напрямних 18 і 20 поздовжньо відносно платформи 12, як проілюстровано двосторонньою стрілкою 32. У проілюстрованому варіанті здійснення для пересування верхнього і нижнього порталів 22 і 24 відповідно на напрямних 18 і 20 використовується система ланцюгового приводу. Ведучі зірочки привідних механізмів 28 і 30 на протилежних сторонах платформи 12 з’єднані осями 34 і 36 відповідно. Незважаючи на те, що для пересування верхнього і нижнього порталів 22 і 24 у вигляді ілюстрації використовується ланцюговий привідний механізм, повинно бути зрозуміло, що в інших варіантах здійснення також можуть використовуватися інші типи привідних механізмів, такі як канатні приводи або інші механічні приводи. У проілюстрованому варіанті здійснення отвору 14 платформи 12 розташовані упоперек платформи 12 у множині рядів 38. Як найкраще показано на фіг. 3, кожний ряд 38 отворів 14 тягнеться в напрямку упоперек поздовжньої осі 13 платформи 12. У проілюстрованому варіанті здійснення платформа 12 містить 44 ряди з 20 отворами 14 в кожному ряді. Однак відповідно до представленого розкриття може використовуватися будь-яка бажана кількість рядів і отворів на ряд. Як показано на фіг. 3, кожен з отворів 14 містить встановлювальний паз 40, який виходить з одного боку отвору 14, для вирівнювання посудини 16 з правильною орієнтацією всередині отворів 14 для зрошування, як обговорюється нижче. Фіг. 3 ілюструє декілька рядів 38, які мають в них посудини 16, і декілька рядів 38 без посудин, розташованих всередині отворів 14. Верхній портал 22 у вигляді ілюстрації містить розділені проміжком рухомі опори або човникові елементи 42, які їздять на верхніх направляючих елементах 18, як найкраще показано на фіг. 3. У проілюстрованому варіанті здійснення човникові елементи 42 ковзають назад і вперед по напрямних 18. Човникові елементи 42, якщо необхідно, можуть містити ролики для полегшення переміщення верхнього порталу 22 назад і вперед в напрямку двосторонньої стрілки 32. Верхній портал 22 також містить розділені проміжком вертикальні опори 44, з’єднані з човниковими елементами 42, і горизонтальну опору 46, яка простягається понад платформою 12 між розділеними проміжком вертикальними опорами 44. Універсальний встановлювальний блок 48 з’єднаний з напрямною 49, представленою на горизонтальній опорі 46. Як найкраще показано на фіг. 3, привідний механізм 50, такий як ланцюговий привід, використовується для пересування універсального встановлювального блока 48 назад і вперед в напрямку двосторонньої стрілки 52 в напрямку упоперек поздовжньої осі 13 опорної платформи 12. Внаслідок цього привідний механізм 50 пересуває універсальний встановлювальний блок 48 назад і вперед понад рядами 38 посудин 16. У проілюстрованому варіанті здійснення, як показано на фіг. 14, з універсальним встановлювальним блоком 48 з’єднані, наприклад, камера 54 і температурний датчик 56. Камера 54 надає нерухомі зображення або відеозображення рослин, які вирощуються в посудинах 16 в процесі експерименту. У одному варіанті здійснення камерою 54 є веб-камера, яка надає зображення у віддалене місце по комунікаційній мережі. У проілюстрованому варіанті здійснення температурним датчиком 56 є інфрачервона камера для надавання теплових зображень рослин в посудинах 16 в процесі експерименту. У одному проілюстрованому варіанті здійснення як температурний датчик 56 використовується система інфрачервоних камер моделі A320, яка пропонується FLIR Systems. У універсальному встановлювальному блоці 48 також можуть бути встановлені інші датчики для кількісного визначення рівня стресу рослин і/або характеристик листового покриву. Як обговорюється нижче, для керування пересуванням в процесі експерименту верхнього порталу 22 і універсального встановлювального блока 48 використовується контролер 100 системи. Привідний механізм 28 пересуває верхній портал 22 назад і вперед в напрямку двосторонньої стрілки 32 для вирівнювання горизонтальної опори 46 верхнього порталу 22 з необхідним рядом 38 посудин 16. Потім привідний механізм 50 пересуває універсальний встановлювальний блок 48 назад і вперед в напрямку двосторонньої стрілки 52 на фіг. 1 і 3 понад конкретним рядом 38 для надавання візуальних і теплових зображень, наприклад, камерою 54 і температурним датчиком 56 відповідно. Деталі нижнього порталу 24 краще усього показані на фіг. 4 і 5. Ніжній портал 24 містить першу і другу рухомі опори або човникові елементи 60, з’єднані з можливістю ковзання з розділеними проміжком нижніми напрямними 20, як найкраще показано на фіг. 4. У проілюстрованому варіанті здійснення човникові елементи 60 ковзають на напрямній 20 назад і вперед. Якщо необхідно, човникові елементи 60 можуть містити ролики. Привідний механізм 30 4 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 60 пересуває нижній портал 24 назад і вперед в напрямку двосторонньої стрілки 32 вздовж поздовжньої осі 13 платформи 12. Нижній портал 24 містить пару вертикальних опорних елементів 62, з’єднаний з човниковими елементами 60 і горизонтальною опорою 64, яка простягається між вертикальними опорними елементами 62. З горизонтальною опорою 64 нижнього порталу 24 з’єднаний ряд динамометричних модулів 66. Кількість динамометричних модулів 66 дорівнює кількості отворів 14 всередині кожного ряду 38 опорної платформи 12. Привідний механізм 30 пересуває нижній портал 24 таким чином, щоб ряд динамометричних модулів 66 був вирівняний безпосередньо під рядом 38 посудин 16 всередині отворів 14 платформи 12. Як обговорюється нижче, в процесі пересування нижнього порталу 24 динамометричні модулі 66 спочатку відділені проміжком від нижніх поверхонь посудин 16. Після того, як нижній портал 24 розташовується під конкретним рядом 38 посудин 16, опорні поверхні 86 для посудин динамометричних модулів 66 пересуваються вгору для зачеплення нижніх поверхонь посудин 16 і підіймають посудини 16. Динамометричні модулі 66 підіймають посудини 16 для того, щоб окремо зважити кожну посудину 16. Як додатково обговорюється нижче, потім можна при необхідності подавати воду через динамометричні модулі 66 в нижні отвори посудин 16 для повторного зрошування в посудинах 16 в процесі експерименту. Внаслідок цього система 10 платформи гравіметричного скринінгу і спосіб представленого розкриття зберігають посудини 16 протягом експерименту в стаціонарних місцеположеннях без необхідності пересування посудин 16 в інше місцеположення для зважування, тестування і повторного зрошування. Незважаючи на те, що в проілюстрованих варіантах здійснення за один раз підіймається один ряд 38 посудин, в інших варіантах здійснення одночасно може підійматися множина рядів 38. На фіг. 6-9 проілюстровані деталі динамометричних модулів 66. Як найкраще показано на фіг. 8 і 9, нижній циліндр 70 містить внутрішню камеру 72. Рухомий поршень 74 містить пластину 76, розташовану всередині камери 72. Лінії 78 і 80 подачі текучого середовища з’єднані з камерою 70 для вибіркової подачі текучого середовища, такого як стиснене повітря або гідравлічна рідина, у внутрішню камеру 72 циліндра 70. Циліндр 70 з’єднаний з горизонтальною опорою 64 нижнього порталу 24. Фіг. 8 показує поршень 74 у втягнутому положенні, в якому опора 86 посудини модуля 66 відділена проміжком від нижньої частини 82 посудини 16, коли нижній портал 24 рухається для вирівнювання динамометричних модулів 66 з рядом 38 посудин 16. На фіг. 9 стиснене повітря з повітряного компресора 214 і підвідної магістралі, або колектора 215 подається через впуск 78 для пересування поршня 74 і пластини 76 вгору в напрямку стрілки 84 з метою підняття динамометричного модуля 66 вгору. Переважно з колектором 215 з’єднаний один або більше регуляторів. Внаслідок цього опора 86 посудини також пересувається вгору в напрямку стрілки 84 в зачеплення з нижньою поверхнею 82 посудини 16 і підіймає посудину 16 вгору таким чином, щоб посудина 16 підтримувалася опорою 86. Динамометричні модулі 66 містять тензодатчик 88, який має перший кінець, з’єднаний з основою 90 кріпленнями 92. Опора 86 посудини з’єднана з протилежним кінцем тензодатчика 88 з'єднувальним елементом 94 і кріпленнями 96 і 98. Після того як посудина 16 піднята і підтримується опорою 86, тензодатчик 88 зважує посудину 16. Контролер 100, з’єднаний з тензодатчиком 88 з'єднувальними елементами 89, порівнює фактичну масу посудини 16 з бажаною масою посудини 16 для протоколу конкретного експерименту. Контролер 100 розраховує різницю між фактичним вмістом води в кожній посудині 16 і бажаним вмістом води в посудині 16 на основі попередньо заданої програми дефіциту води конкретного експерименту. Якщо контролер 100 визначає, що в посудину 16 необхідно додати воду, воду можна додати безпосередньо через динамометричний модуль 66 без переміщення посудини 16 в інше місце. Як показано на фіг. 7 і 8, трубопровід 102 подачі води з’єднаний з першим і другим клапанами 120 і 122 регулювання потоку через труби 124, 126 і 128. Труба 130 приєднана між клапаном 120 і з'єднувальним елементом 104. Труба 132 приєднана між клапаном 122 і з'єднувальним елементом 104. З водопроводом 212 з’єднаний трубопровід 102 подачі води. З отвором 106 в опорі 86 з’єднаний з'єднувальний елемент 104, найкраще показаний на фіг. 8 і 9. У проілюстрованому варіанті здійснення клапан 120 регулювання потоку надає «грубий» потік текучого середовища, тоді як клапан 122 регулювання потоку надає «точний» потік текучого середовища. У одному проілюстрованому варіанті здійснення потік текучого середовища через клапан 120 грубого регулювання потоку приблизно в десять разів більший, ніж потік текучого середовища через клапан 122 точного регулювання потоку, хоча може використовуватися будь-яке бажане співвідношення. Під час роботи контролер 100 спочатку відкриває клапани 120 і 122 як грубого, так і точного регулювання потоку для початку 5 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 60 наповнення або внесення підживлення в посудини 16. Коли маса посудин наближається до бажаної маси для конкретного експерименту, контролер 100 вимикає клапан 120 грубого регулювання потоку і завершує операцію наповнення, використовуючи клапан 122 точного регулювання потоку для точного регулювання кількості води, яка додається в посудину 16. У проілюстрованому варіанті здійснення верхня поверхня опори 86 покрита силіконовою прокладкою 108 для покращення герметизації між нижньою поверхнею 82 посудини 16 і прокладкою 108 на верхній поверхні опори 86 для того, щоб в посудину 16 могла подаватися вода. У проілюстрованому варіанті здійснення з верхньої поверхні опори 86 вгору виступають штирі 112 для утримання силіконової прокладки 108 на своєму місці на верхній поверхні опори 86. Прокладка 108 містить отвір 114, вирівняний з отвором 106 опори 86 для того, щоб вода могла протікати через прокладку 108 і в посудину 16. Незважаючи на те, що в одному варіанті здійснення для прокладки 108 використовується силікон, також можна використовувати інші відповідні матеріали. Опора 86 динамометричного модуля 66 також містить канавку або вирізану ділянку 110, яка виконана з можливістю збору води і відведення води від електричних складових частин динамометричного модуля 66. На фіг. 10-13 показані деталі ілюстративного варіанту здійснення посудини 16. Посудина 16 містить корпусну частину 140, яка має загалом циліндричну форму. Корпусна частина 140 посудини 16 виконана з можливістю вставки всередину отворів 14 платформи 12 з достатнім зазором для того, щоб, коли динамометричний модуль 66 підіймає посудину 16, посудина 16 повністю підтримувалася опорою 86 динамометричного модуля 66, забезпечуючи точне зважування посудини 16. Верхній кінець 142 посудини 16 містить отвір 144 для введення ґрунту і насіння або рослин в посудину 16 і надавання рослині можливості (не показано) рости назовні з посудини 16 традиційним чином. Верхній кінець 142 містить торцеву кришку 146, яка має зовнішній фланець 148, виконаний з можливістю зачеплення верхньої поверхні опорної платформи 12, коли посудину 16 завантажують в отвір 14. Протилежні сторони 149 фланця 148 вигнуті для полегшення завантаження і вивантаження посудин 16 з платформи 12. Також на торцевій кришці 146 утворена вирівнююча лапка, 150. Вирівнююча лапка, 150 виконана з можливістю вирівнювання з пазом 40 отворів 14 для того, щоб посудина 16 розташовувалася на опорній платформі 12 з правильною орієнтацією для зважування і повторного зрошування. Посудина 16 містить внутрішній резервуар 152 для води, який містить нижню частину 153 і множину розділених проміжками вертикальних каналів 154 для текучого середовища для прийому в них води. Як показано на фіг. 12, нижній кінець 82 посудини 16 містить множину ребер 156 і нарізних встановлювальних елементів 158. Всередині кільцевої канавки 162 розташоване ущільнююче кільце 160, яке оточує навколишній нижній кінець 82 посудини 16. Торцева кришка 164 з’єднана з нижнім кінцем 82 кріпленнями 156, які виступають через ущільнюючі кільця 168 і отвори 169 в кришці 164 і входять в зачеплення з нарізними встановлювальними елементами 158. У проілюстрованому варіанті здійснення з отвором 172, утвореним в нижній пластині 164, з’єднаний зворотний клапан 170. У вигляді ілюстрації з отвором 172 за допомогою кільцевої ущільнюючої прокладки 178 з’єднані діафрагма 174 і зонтичний клапан 176. Як найкраще показано на фіг. 8 і 9, кільцева ущільнююча прокладка 178 розташована під нижньою поверхнею 82 посудини 16 для зчеплення з силіконовою прокладкою 108 на верхній поверхні опори 86 з метою надавання ущільнення між отвором 72 і прокладкою 108 на верхній поверхні опори 86. Як найкраще показано на фіг. 9, за рахунок вміщення лапок 150 посудин 16 в пази 40 отворів 14 отвору 172 в резервуарах 152 посудин 16 автоматично вирівнюються з отворами 106 в опорах 86 динамометричних модулів 66. Внаслідок цього, коли посудина 16 піднята, як показано на фіг. 9, між отвором 106 в опорі 86 і отвором 172 торцевої кришки 164 в нижньому кінці 82 посудини 16 автоматично встановлюється з'єднання з можливістю проходження текучого середовища. Коли контролер 100 за рахунок відкривання клапанів 120, 122 примушує воду протікати, вода тече вгору через з'єднувальний елемент 104, через отвір 106 опори 86, через діафрагму 174 і повз зворотний клапана 176 в резервуар 152 посудини 16. На фіг. 9 потік текучого середовища ілюстративно показаний стрілкою 184. Також, як проілюстровано на фіг. 9, текуче середовище тече в напрямку стрілок 188 вгору з нижньої частини 153 резервуару 152 через отвори 186, які знаходяться в сполученні з можливістю проходження текучого середовища з вертикальними каналами 154 для текучого середовища. Якщо настає стан переповнення, для відведення води канали 154 містять верхні отвори 155, розташовані біля верхнього кінця 142. Як найкраще проілюстровано на фіг. 8, 9 і 13, внутрішні канали 154 для текучого середовища містять внутрішню сітку 190 з синтетичної тканини, яка створює внутрішню частину каналів 154. Сітка 190 дозволяє воді протікати через сітку, але запобігає 6 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 нагромадженню ґрунту, сміття або коріння рослин у вертикальних каналах 154 резервуара 152. Знімна зливна пробка 194 і ущільнююче кільце 196 ущільнюють зливний отвір 198 торцевої кришки 164. Резервуар 152 осушують за рахунок видалення зливної пробки 194. У ще одному проілюстрованому варіанті здійснення посудини 16 резервуар 152 знаходиться в сполученні з можливістю проходження текучого середовища з трубкою або каналом (не показано), який доставляє воду з резервуара 152 у верхній кінець 142 посудини 16 для поливу зверху рослини в посудині. У даному варіанті здійснення посудина 16 звичайно не містить канали 154 для текучого середовища або сітку 190. У ще одному варіанті здійснення сітка 190 замінена водопроникним матеріалом для того, щоб вода текла вгору з резервуара 152 по каналах 154 в напрямку стрілок 188 у верхні отвори (не показано) поруч з верхнім кінцем 142 посудини 16 для забезпечення поливу рослини в посудині зверху через канали 154. Під час роботи посудини 16 наповнюють ґрунтом, насінням і/або рослинами, як необхідно для конкретного експерименту, і завантажують в отвори 14 опорної платформи 12. Лапки 150 посудин 16 вирівнюють з пазами 40 отворів 14. Як найкраще показано на фіг. 3, завантажувальна платформа 200 містить рухомі опори 202, з’єднані з верхньою напрямною 18. Опори 202 з’єднані з горизонтальною опорою 204, яка підтримує складані панелі 206. У одному варіанті здійснення завантажувальна платформа 200 пересувається привідним механізмом назад і вперед в напрямку двосторонньої стрілки 32 вздовж поздовжньої осі 13 платформи 12. У ще одному проілюстрованому варіанті здійснення завантажувальна платформа 200 з’єднана з верхнім порталом 22 з'єднувальними важелями. Внаслідок цього верхній портал 22 використовується для пересування завантажувальної платформи 200 назад і вперед на платформі 12 для полегшення завантаження посудин 16 в отвори 14. Один варіант здійснення полегшує завантаження і вивантаження посудин 16 в кінці опорної платформи 12. Також в ілюстративному варіанті здійснення складані панелі 206 забезпечують можливість завантаження і вивантаження посудин 16 на більш ергономічному, більш низькому рівні, ніж повна висота опорної платформи 12. Центральна ділянка 208 завантажувальної платформи 200 відкривається, розкриваючи ряд 38 отворів 14. Після того як завантажувальна платформа 200 розташовується понад конкретним рядом 38, бічні панелі 206 складаються вниз, перекриваючи сусідні ряди 38 отворів 14. Внаслідок цього оператор може ходити по панелях 206 для полегшення завантаження або вивантаження посудин 16 з отворів 14 розкритого ряду 38. Після того як один ряд 38 завантажують посудинами 16, завантажувальна платформа 200 рухається до наступного ряду 38. У вигляді ілюстрації перед переміщенням завантажувальної платформи 200 панелі 208 складають вгору. Після того як всі посудини 16 завантажені на опорну платформу 12, оператор вибирає конкретний протокол експерименту. Можна вибирати експеримент і стежити за ним, використовуючи графічний користувацький інтерфейс (GUI) 210. GUI 210 показаний на фіг. 1-3 у вигляді сенсорного екрана. Однак GUI 210 може включати будь-який тип користувацького інтерфейсу. Далі робота платформної системи 10 гравіметричного скринінгу і спосіб будуть описані в поєднанні з фіг. 14 і 15. Після того як були завантажені посудини 16 і з використанням графічного користувацького інтерфейсу 210 був вибраний конкретний протокол експерименту, контролер 100 автоматично керує переміщенням верхнього порталу 22, нижнього порталу 24 і універсального встановлювального блока 48 відносно опорної платформи 12. Контролер 100 також керує подачею в динамометричний модуль 66, з’єднаний з нижнім порталом 24, води з водопроводу 212 і стисненого повітря з повітряного компресора 214. Далі з посиланням на фіг. 15 в блоці 220 починається процес експерименту. На початку процесу верхній і нижній портали 22 і 24 у вигляді ілюстрації розташовані біля одного кінця опорної платформи 12. Портали 22 і 24 пересуваються до вирівнювання з наступним рядом 38 отворів 14 і посудин 16, як проілюстровано в блоці 222. Потім контролер 100 керує переміщенням універсального встановлювального блока 48 на горизонтальній опорі 46 верхнього порталу 22. Контролер 100 робить зображення рослин в посудинах 16, використовуючи камеру 54, і знімає показники температури, використовуючи інфрачервону сенсорну камеру 56, в міру того як універсальний встановлювальний блок 48 пересуває камери 54, 56 назад і вперед понад рослинами в межах конкретного ряду 38, як проілюстровано в блоці 224. У проілюстрованому варіанті здійснення камера 54 і температурний датчик 56 розташовані в межах теплозахисної огорожі для того, щоб камери 54 і 56 не ушкоджувалися теплом, яке подається всередину теплиці. Дані від камер 54, 56 і будь-яких інших датчиків зберігаються в пам'яті 101 контролером 100. 7 UA 113171 C2 5 10 15 20 25 30 35 40 Після того, як нижній портал 24 пересувається в положення під конкретним рядом 38, контролер 100 керує подачею стисненого повітря з пневматичної мережі 214 в циліндри 70 для підйому кожного з множини динамометричних модулів 66 з втягнутого положення фіг. 8 у висунуте положення фіг. 9 для підйому вгору кожної посудини 16 в ряді 38, як проілюстровано в блоці 226. Як обговорювалося вище, посудини 16 повністю підтримуються опорами 86 динамометричних модулів 66 у висунутих положеннях. Потім контролер 100 зважує кожну посудину, як проілюстровано в блоці 228, і зберігає в пам'яті 101 інформацію про масу кожної посудини 16. Далі контролер 100 визначає, чи є необхідність в додаванні води в яку-небудь з посудин 16, як проілюстровано в блоці 230. Якщо необхідність додавання води відсутня, контролер 100 переходить в блок 234 фіг. 15. Якщо в блоці 230 необхідно додати воду, контролер 100 регулює клапани 120, 122 на подачу води з водопроводу 212 через динамометричні модулі 66 в посудини 16, як обговорювалося детально вище. Вода додається доти, поки маса посудин не досягне необхідної маси для конкретного експерименту, як проілюстровано в блоці 232. Нова маса посудин, прийнята після повторного зрошування, зберігається в пам'яті 101. Далі, контролер 100 регулює подачу 214 повітря для пересування поршнів 74 динамометричного модуля 66 з висуненого положення фіг. 9 назад у втягнуте положення фіг. 8, як проілюстровано в блоці 234. У даному положенні посудини 16 знов підтримуються фланцями 148, які входять в зачеплення з опорною платформою 12. Потім контролер 100 визначає, чи є конкретний ряд 38 останнім рядом 38 на опорній платформі 12, як проілюстровано в блоці 236. Якщо так, контролер 100 пересуває верхній і нижній портали 22 і 24 назад в початкове положення, як проілюстровано в блоці 238. Якщо в блоці 236 ряд не був останнім рядом, в блоці 222 контролер 100 пересуває верхній і нижній портали 22, 24 в наступний ряд 38, а потім продовжує стадії фіг. 15, які залишилися. для наступного ряду 38. Під час процесу повторного зрошування в ґрунт, якщо необхідно, можна додавати поживні речовини. У доповнення воду можна використовувати для вимивання поживних речовин з посудин 16 шляхом переповнення резервуарів і надавання воді можливості виходити через переливні отвори 155. Можна проводити експерименти по ефективності використання азоту (NUE). Як найкраще показано на фіг. 1-3, зовнішні датчики 240 і 242 створюють світлові бар'єри для виявлення руху біля системи 10. Якщо детектори 240 і 242 виявляють подібний рух, контролер 100 вимикає роботу системи 10. Після того як область звільняється, контролер 100 починається процес знову на тій же самій стадії в процесі. Розкриття попередньої патентної заявки, серійний № 61/476055, поданої 15 квітня 2011 року, явним чином включено в дану заявку за допомогою посилання. Незважаючи на те, що варіанти здійснення представленого розкриття були описані з наявністю ілюстративних конструкцій, представлений винахід може бути додатково модифікований в межах суті і об'єму правових домагань даного розкриття. Внаслідок цього дана заявка передбачає охоплення будь-яких варіантів, використань або пристосувань розкриття з використанням його загальних принципів. Крім того, дана заявка передбачає охоплення таких відхилень від представленого розкриття, які потрапляють в межі відомої або загальноприйнятої практики в галузі, якої стосується даний винахід. ФОРМУЛА ВИНАХОДУ 45 50 55 1. Система для регулювання вологості ґрунту у множини горшкових рослин, при цьому система містить: стаціонарну платформу, яка має множину отворів, утворених в ній, при цьому отвори розташовані на платформі у множині рядів; множину посудин, розташованих у множині отворів в платформі, при цьому посудини підтримуються платформою; рухомий нижній портал, розташований під платформою, при цьому рухомий нижній портал підтримує множину динамометричних модулів, вирівняних з множиною посудин, розташованих в ряду отворів, причому кожний динамометричний модуль містить тензодатчик, який має опору, здатну пересуватися з втягнутого положення, відділеного проміжком від нижньої поверхні посудини, у висунуте положення, в якому опора тензодатчика підіймає посудину вгору для підтримки на ній маси посудини, при цьому тензодатчик зважує підняту посудину; контролер, з'єднаний з тензодатчиком, при цьому контролер запрограмований визначати, чи мають потребу посудини в наборі води залежно від маси посудин; і 8 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 водопровід, з'єднаний з динамометричним модулем, при цьому водопровід містить щонайменше один клапан регулювання потоку, керований контролером, для вибіркової подачі води через динамометричний модуль в посудину. 2. Система за п. 1, яка додатково містить верхній портал, який пересувається над платформою, при цьому верхній портал містить щонайменше один датчик, розташований на ньому, для отримання даних, пов'язаних з рослинами у множині посудин. 3. Система за п. 2, в якій щонайменше один датчик на верхньому порталі містить камеру для отримання зображень рослин у множині посудин. 4. Система за п. 2, в якій щонайменше один датчик на верхньому порталі являє собою температурний датчик. 5. Система за п. 4, в якій температурним датчиком є інфрачервона камера. 6. Система за п. 2, в якій верхній портал містить привідний механізм, який пересуває щонайменше один датчик на верхньому порталі назад і вперед зверху рядів посудин, розташованих всередині отворів платформи. 7. Система за п. 2, в якій верхній портал містить перший і другий розділені проміжком човникові елементи, з'єднані з розділеними проміжком верхніми напрямними, розташованими на протилежних сторонах платформи, для надавання можливості переміщення верхнього порталу зверху платформи, першу і другу рознесені вертикальні опори, з'єднані з першим і другим човниковими елементами відповідно, і горизонтальну опору, яка простягається зверху платформи між першою і другою рознесеними вертикальними опорами верхнього порталу, при цьому з горизонтальною опорою верхнього порталу з'єднаний щонайменше один датчик. 8. Система за п. 1, в якій нижній портал містить перший і другий розділені проміжком човникові елементи, з'єднані з розділеними проміжком нижніми напрямними, розташованими на протилежних сторонах платформи, для надавання можливості переміщення нижнього порталу під платформою, першу і другу рознесені вертикальні опори, з'єднані з першим і другим човниковими елементами відповідно, і горизонтальну опору, яка простягається під платформою між першою і другою рознесеними вертикальними опорами нижнього порталу, при цьому з горизонтальною опорою нижнього порталу з'єднана множина динамометричних модулів. 9. Система за п. 8, в якій горизонтальна опора нижнього порталу підтримує трубопровід подачі текучого середовища, з'єднаний з динамометричними модулями, для вибіркового висунення і втягування опор динамометричних модулів, і трубопровід подачі води, з'єднаний з динамометричними модулями, для подачі води в посудини через динамометричні модулі. 10. Система за п. 9, в якій опори динамометричних модулів містять отвір в рідинному сполученні з трубопроводом подачі води, і в якій кожна з множини посудин містить резервуар для текучого середовища, який має заливний отвір, розташований на нижній поверхні посудини, і зворотний клапан, з'єднаний із заливним отвором, для надавання можливості надходження води, яка подається через отвір опори динамометричного модуля, в заливний отвір посудини через зворотний клапан. 11. Система за п. 10, в якій резервуар для текучого середовища кожної посудини містить нижню частину в сполученні із заливним отвором і множину вертикально розташованих каналів для текучого середовища для подачі води в ґрунт всередині посудини. 12. Система за п. 11, яка додатково містить сітку, яка утворює внутрішню частину вертикально розташованих каналів для текучого середовища, при цьому сітка забезпечує можливість протікання води через сітку в ґрунт, але запобігає нагромадженню ґрунтового сміття і коріння рослин у каналах, які вертикально проходять, для текучого середовища резервуара. 13. Система за п. 11, яка додатково містить переливний отвір в сполученні з кожним з каналів для текучого середовища, при цьому переливні отвори розташовані біля верхнього кінця посудини. 14. Система за п. 10, в якій заливні отвори посудин зміщені від центральної осі посудин і в якій кожна посудина містить вирівнюючу лапку, виконану з можливістю розташування всередині вирізаної ділянки отвору, утвореної в платформі, для вирівнювання заливного отвору посудини з водопровідним отвором в опорі динамометричного модуля. 15. Система за п. 10, яка додатково містить прокладку, розташовану на опорі кожного динамометричного модуля, при цьому прокладка покращує герметичність між заливним отвором посудини і водопровідним отвором, утвореним в опорі динамометричного модуля. 16. Система за п. 15, в якій прокладка містить отвір, вирівняний з водопровідним отвором в опорі динамометричного модуля. 17. Система за п. 16, в якій опора динамометричного модуля містить множину штирів, виконаних з можливістю вирівнювання прокладки на опорі. 9 UA 113171 C2 5 10 15 20 25 30 35 40 45 50 55 18. Система за п. 1, в якій опора динамометричного модуля містить вирізану ділянку, виконану з можливістю відведення текучого середовища з опори. 19. Система за п. 1, в якій кожний динамометричний модуль містить циліндр і поршень, розташований в циліндрі, при цьому поршень з'єднаний з тензодатчиком і може пересуватися між втягнутим положенням і висуненим положенням для пересування тензодатчика і опори з втягнутого положення, відділеного проміжком від нижньої поверхні посудини, у висунуте положення, в якому опора тензодатчика підіймає посудину вгору для підтримки на ній маси посудини. 20. Система за п. 1, в якій кожна посудина містить корпусну частину, яка має циліндричну форму, і фланець, розташований на верхньому кінці посудини, при цьому фланець виконаний з можливістю зачеплення платформи, коли корпусну частину посудини вставляють в отвір в платформі для підтримки посудини на платформі. 21. Система за п. 1, яка додатково містить завантажувальну платформу, рухому відносно стаціонарної платформи, при цьому завантажувальна платформа містить щонайменше одну складану панель, виконану з можливістю розташування над множиною рядів отворів платформи для полегшення завантаження посудин в отвори, які розташовані поручзі складаною панеллю. 22. Система за п. 1, в якій водопровід з'єднаний з динамометричним модулем за допомогою першого і другого клапанів регулювання потоку, при цьому перший клапан регулювання потоку має швидкість потоку текучого середовища, більшу, ніж у другого клапана регулювання потоку, і в якій контролер спочатку відкриває перший і другий клапани регулювання потоку для початку наповнення посудин, причому контролер закриває перший клапан регулювання потоку, коли маса посудин наближається до бажаної, і завершує наповнення посудини з другим клапаном регулювання потоку для точного регулювання кількості води, яка додається в посудину. 23. Спосіб регулювання вологості ґрунту у множини горшкових рослин, при цьому спосіб включає: надавання стаціонарної платформи, яка має множину отворів в ній; розташування множини посудин в отворах платформи, при цьому посудини підтримуються платформою; підняття посудин з множиною динамометричних модулів; зважування кожної з множини посудин динамометричними модулями; визначення, чи мають потребу посудини в наборі води залежно від маси посудин; зрошування посудин через динамометричні модулі, якщо необхідно, залежно від стадії визначення; і опускання множини динамометричних модулів таким чином, щоб множина посудин підтримувалася платформою. 24. Спосіб за п. 23, в якому отвори в платформі розташовані у множині рядів, на стадії пересування множини динамометричних модулів під платформою динамометричні модулі вирівнюються з рядом посудин, а на стадії підйому посудин ряд посудин підіймається повністю одночасно з множиною динамометричних модулів. 25. Спосіб за п. 24, який додатково включає пересування динамометричних модулів до наступного ряду посудин і виконання стадій підйому, зважування, визначення, зрошування і опускання для наступного ряду посудин. 26. Спосіб за п. 23, який додатково включає пересування щонайменше одного датчика зверху рядів посудин для збору даних, пов'язаних з рослинами. 27. Посудина для використання у системі для регулювання вологості ґрунту у множини горшкових рослин, при цьому система містить стаціонарну платформу, яка має множину утворених в ній отворів, при цьому посудина містить: корпусну частину, яка має відкритий верхній кінець і нижній кінець; фланець, з'єднаний з корпусною частиною поруч з верхнім кінцем, при цьому фланець виконаний з можливістю зачеплення платформи для утримання корпусної частини всередині отвору платформи; резервуар для текучого середовища, який має нижню частину, розташовану поруч з нижнім кінцем корпусної частини, множину вертикально розташованих каналів для текучого середовища, які простягаються вгору в напрямку верхнього кінця корпусної частини, і заливний отвір, розташований в нижньому кінці корпусної частини в сполученні з нижньою частиною резервуара для текучого середовища; і зворотний клапан, з'єднаний із заливним отвором для надавання текучого середовища, яке підлягає подачі в резервуар для текучого середовища з нижнього кінця корпусної частини через заливний отвір і зворотний клапан. 10 UA 113171 C2 5 10 28. Посудина за п. 27, яка додатково містить сітку, яка утворює внутрішню частину вертикально розташованих каналів для текучого середовища, при цьому сітка забезпечує можливість протікання текучого середовища через сітку в ґрунт всередині корпусної частини, але запобігає нагромадженню ґрунтового сміття і коріння рослин у вертикально розташованих каналах для текучого середовища резервуара. 29. Посудина за п. 27, яка додатково містить переливний отвір в сполученні з кожним з каналів для текучого середовища, при цьому переливні отвори розташовані біля верхнього кінця корпусної частини. 30. Посудина за п. 27, в якій заливні отвори зміщені від центральної осі корпусної частини і яка додатково містить вирівнюючу лапку, розташовану біля верхнього кінця корпусної частини, при цьому вирівнююча лапка виконана з можливістю розташування всередині вирізаної ділянки отвору, утвореної в платформі, для вирівнювання заливного отвору з водопроводом. 11 UA 113171 C2 12 UA 113171 C2 13 UA 113171 C2 14 UA 113171 C2 15 UA 113171 C2 16 UA 113171 C2 17 UA 113171 C2 18 UA 113171 C2 19 UA 113171 C2 20 UA 113171 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 21
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated gravimetric screening platform system and method
Автори англійськоюGolgotiu, Kirsti, A., Herve, Philippe, Keller, Douglas, Swartwood, Troy, M., Donaldson, Jeffrey, D.
Автори російськоюГолгоутью Керсти А., Эрве Филипп, Келлер Дуглас, Свортвуд Трой М., Дональдсон Джеффри Д.
МПК / Мітки
МПК: A01G 27/00, A01G 9/24, A01G 7/00
Мітки: скринінгу, автоматизована, система, платформна, гравіметричного, спосіб
Код посилання
<a href="https://ua.patents.su/23-113171-avtomatizovana-platformna-sistema-gravimetrichnogo-skriningu-i-sposib.html" target="_blank" rel="follow" title="База патентів України">Автоматизована платформна система гравіметричного скринінгу і спосіб</a>
Обертова багатокліпсаторна платформна пакувальна система та спосіб упаковування ділянок продуктів з використанням цієї системи
Номер патенту: 100401
Опубліковано: 25.12.2012
Автори: Лоудер Меттью Д., Уіттлсі Томас Є., Потіт Уілльям М., Гріггс Самуель Д., Мей Денніс Дж.
МПК: B65B 9/10
Мітки: системі, спосіб, пакувальна, ділянок, платформна, цієї, використанням, упаковування, продуктів, система, обертова, багатокліпсаторна
Формула / Реферат:
1. Пакувальна система, що містить:обертову платформу, яка має вертикальну стійку;магістралі подачі повітря, які прикріплені до вертикальної стійки і включають першу і другу магістралі подачі повітря для кожного відповідного місця кліпсування; імножину рознесених по окружності кліпсаторів, встановлених на обертовій платформі, причому кожен кліпсатор включає вбудовані магістралі подачі повітря, які рознімно з'єднані з...
Система метанового скринінгу
Номер патенту: 48156
Опубліковано: 10.03.2010
Автори: Бенін Євген Юлійович, Фельдман Семен Данилович, Федоренко Геннадій Леонідович, Липовецький Леонід Семенович, Медведєв Валерій Миколайович
МПК: H04W 24/00
Мітки: метанового, скринінгу, система
Формула / Реферат:
Система метанового скринінгу, що містить випромінюючу кабельну мережу, систему визначення місцезнаходження персоналу, систему радіозв'язку, індивідуальні абонентські пристрої, комп'ютерну диспетчерську систему, яка відрізняється тим, що до її складу включені прилади для забезпечення вимірювання, накопичення та передачі даних про об'ємні частки метану у середовищі, де знаходяться індивідуальні абонентські пристрої.
Автоматизована система гідромоніторингу
Номер патенту: 60595
Опубліковано: 25.06.2011
Автори: Сантоній Володимир Іванович, Сминтина Валентин Андрійович, Янко Володимир Васильович, Іванченко Іраїда Олександрівна, Будіянська Людмила Михайлівна
МПК: G01F 23/28, G01F 23/00
Мітки: автоматизована, система, гідромоніторингу
Формула / Реферат:
Автоматизована система гідромоніторингу, що містить датчик контролю рівня води, передавач та блок електроживлення, яка відрізняється тим, що як датчик рівня води використовують пристрій неконтактного вимірювання рівня води на основі лазерного рівнеміра, що забезпечує високу точність вимірювань, також в ній застосовують поплавець з дзеркальним покриттям, який покращує умови відбиття оптичного випромінювання від досліджуваної поверхні, а для...
Автоматизована система керування пожежовибухобезпекою
Номер патенту: 10307
Опубліковано: 15.11.2005
Автори: Котяхов Володимир Васильович, Троїцький Віктор Ісакович, Воржев Валерій Валерійович, Виноградов Віктор Євгенович
МПК: G05B 15/00
Мітки: керування, пожежовибухобезпекою, система, автоматизована
Формула / Реферат:
1. Автоматизована система керування пожежовибухобезпекою, що містить датчики пожежі та газу, обчислювальний пристрій, а також датчики параметрів роботи обладнання, датчики параметрів навколишнього середовища і датчики параметрів технологічних процесів, що підключені до відповідних входів обчислювального пристрою, а також органи управління, електрично зв'язані з обчислювальним пристроєм, яка відрізняється тим, що вона додатково оснащена...
Автоматизована теплогідромеліоративна система
Номер патенту: 49688
Опубліковано: 11.05.2010
Автори: Пінчук Олег Леонідович, Мельник Володимир Сергійович, Востріков Володимир Петрович
МПК: A01G 23/06
Мітки: автоматизована, система, теплогідромеліоративна
Формула / Реферат:
Автоматизована теплогідромеліоративна система, що включає насосну станцію, магістральний, розподільний, збірний та скидний трубопроводи, яка відрізняється тим, що теплогідромеліоративна система обладнана секціями гнучких тонкостінних оболонок-теплообмінників, які лежать на поверхні ґрунту, крапельною зволожувальною системою та трирівневою системою автоматизованого керування із безпровідним зв'язком між окремими рівнями, яка включає автономно...
Попередній патент: Одержання і застосування композитного матеріалу, який містить волокна і щонайменше один вінілхлоридний полімер
Наступний патент: Стійкий рідкий препарат етанерцепту
Випадковий патент: Спосіб попередження розвитку цукрового діабету у хворих після операції з приводу інфікованого панкреонекрозу