Наземна військова модульна робототехнічна машина-контрробот для протидії бойовій робототехніці противника
Номер патенту: 103147
Опубліковано: 10.09.2013
Автори: Ковалішин Сергій Семенович, Григор'єв Олексій Петрович, Беліков Віктор Тріфонович, Чепков Ігор Григорович, Гуляк Олег Вікторович, Даник Юрій Григорович
Формула / Реферат
1. Наземна військова модульна робототехнічна машина для протидії бойовій робототехніці противника, яка є рухомою радіокерованою установкою, що складається з щонайменше одного енергетично автономного транспортного візка-трака, виконаного з можливістю об'єднання за допомогою шарнірних з'єднань з щонайменше одним подібним візком-траком в транспортний блок, виконаного у вигляді плоскої платформи з кронштейнами для кріплення опорних коліс, забезпеченої повнопривідним електромеханічним рушієм колісного, гусеничного або комбінованого типу, в опорні колеса якого вбудовані тягові привідні електричні двигуни, причому плоска платформа візка-трака із закріпленим на ній функціональним устаткуванням протидії забезпечена захищеними внутрішніми порожнинами для розміщення джерел електроенергії електрохімічного або накопичувального, або комбінованого типів перетворювачів електроенергії для живлення електродвигунів, датчиків системи керування електродвигунами, бортового електронно-обчислювального устаткування керування і зв'язку, привідних пристроїв і механізмів маніпуляторів, озброєння і допоміжного устаткування, датчиків розвідки і параметрів зовнішньої обстановки, яка відрізняється тим, що в платформу вбудовані плоскі торцеві електродвигуни повороту опорних коліс, електрично зв'язані з тяговими привідними електродвигунами, на вертикальному валу кожного з яких, встановленому у підшипниковому вузлі, жорстко закріплені кронштейни відповідних опорних коліс, причому вертикальні вали торцевих електродвигунів повороту розташовані у вершинах квадрата, вертикальна вісь симетрії якого співпадає з вертикальною віссю симетрії платформи, а функціональне устаткування протидії додатково включає в себе встановлений на щонайменше одному візку-траку, комплекс радіоелектронного пригнічення працездатності приймально-передавальної радіоапаратури бойової робототехніки противника.
2. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана квадратною та має верхню квадратну кришку, на якій закріплені складові елементи шарнірних з'єднань.
3. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана круглою та має верхню круглу кришку, на якій закріплені складові елементи шарнірних з'єднань.
4. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана круглою та має верхню круглу кришку, по периметру платформи виконана Т-подібна виїмка, в якій, з можливістю вільного переміщення по периметру, розміщені кінцеві виступи складових елементів шарнірних з'єднань.
5. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана квадратною та має верхню круглу кришку, на якій закріплено кругове кільце, в якому по периметру виконана Т-подібна виїмка, в якій, з можливістю вільного переміщення по периметру верхньої кришки, розміщені кінцеві виступи складових частин шарнірних з'єднань.
6. Наземна військова модульна робототехнічна машина за пп. 1-5, яка відрізняється тим, що щонайменше один візок-трак забезпечений комплектом плоских пластин з клейовим покриттям і електромеханічними пристроями для їх фіксації і скидання.
Текст
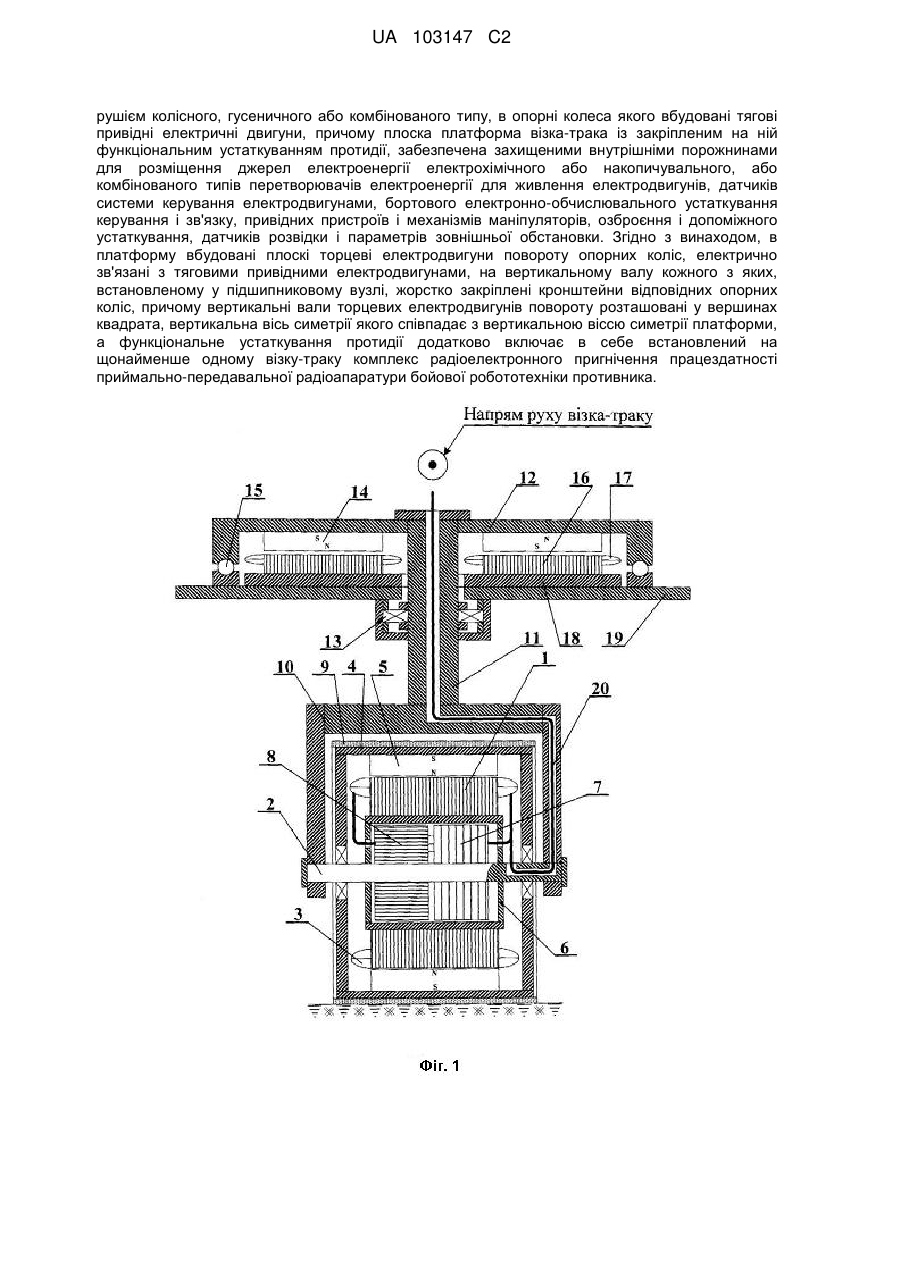
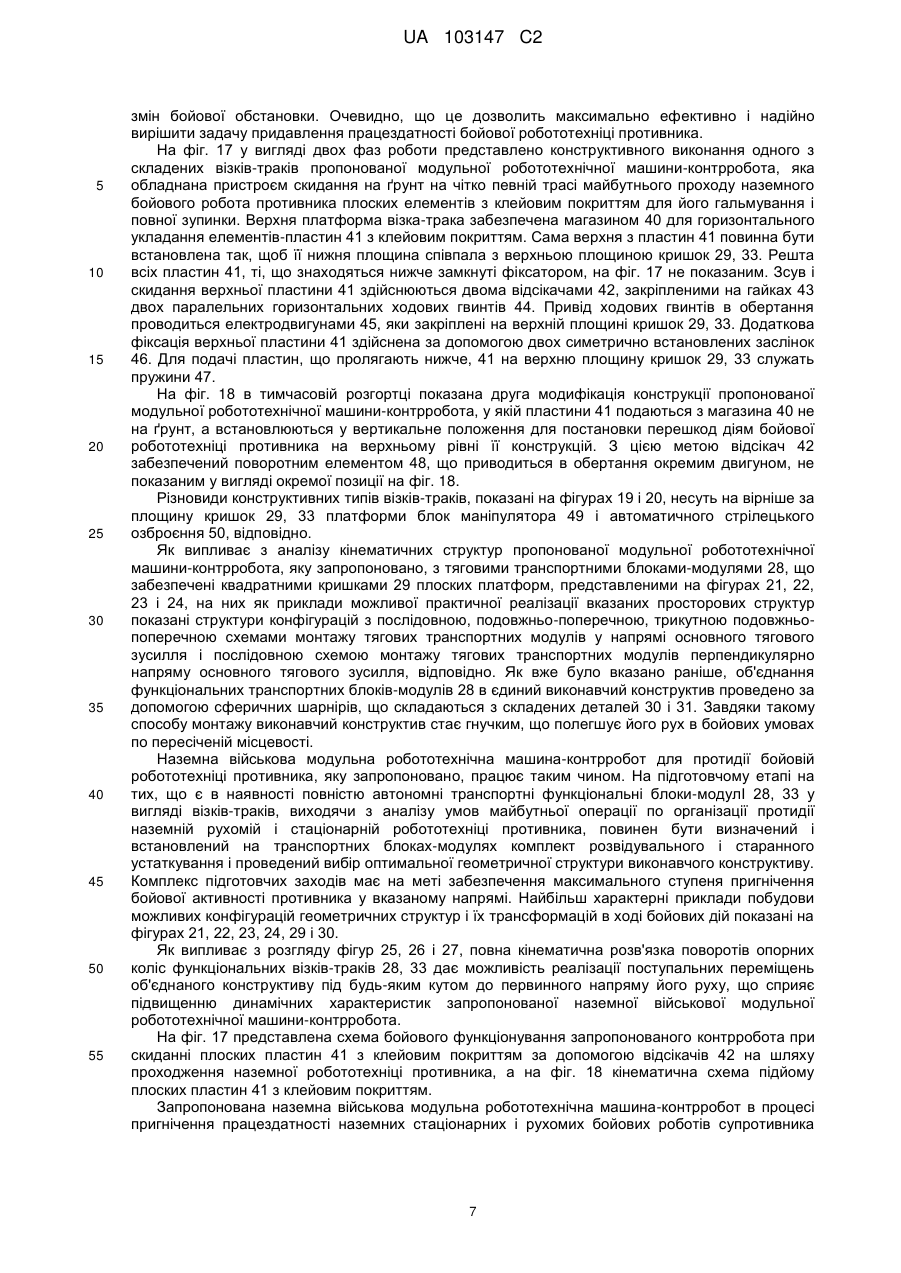
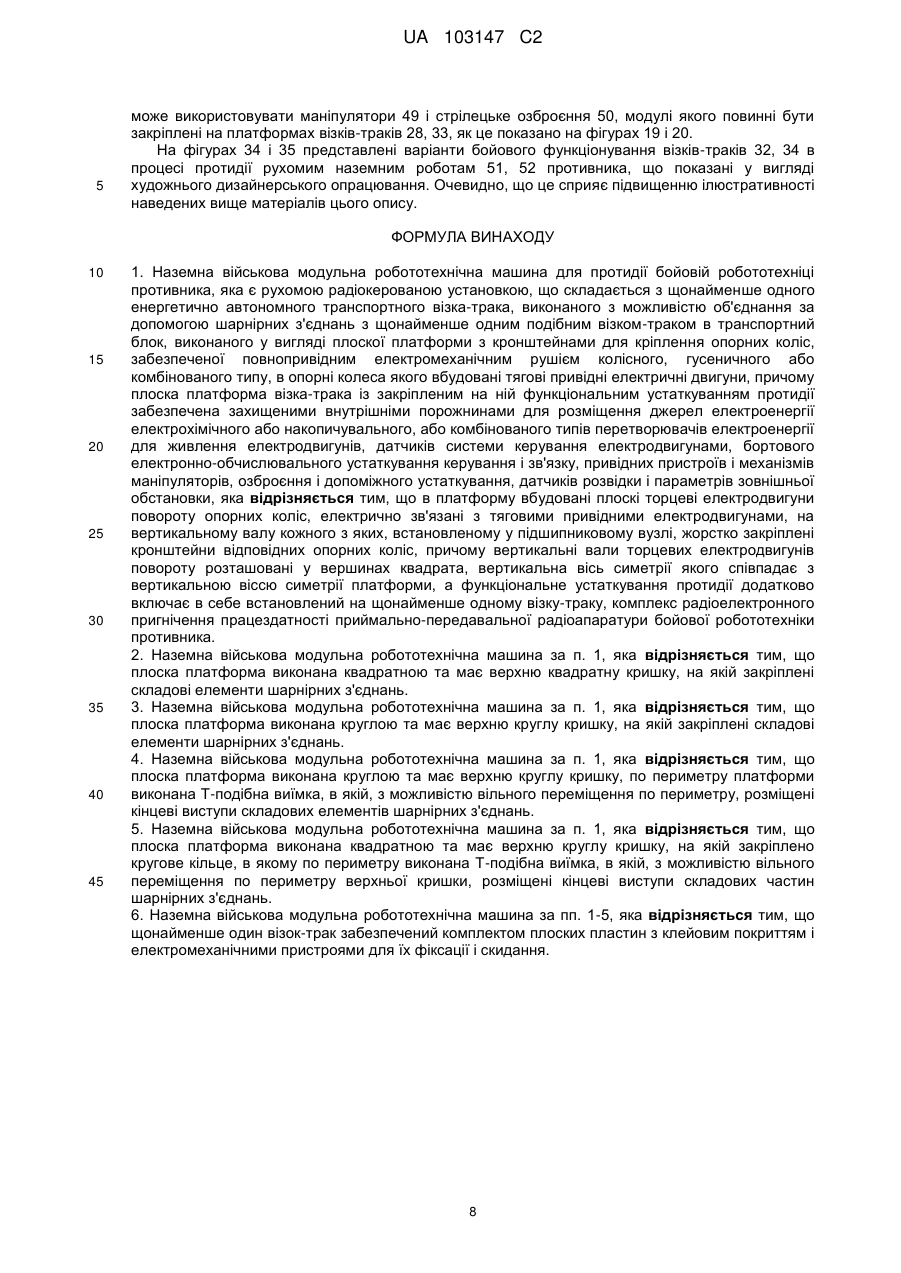
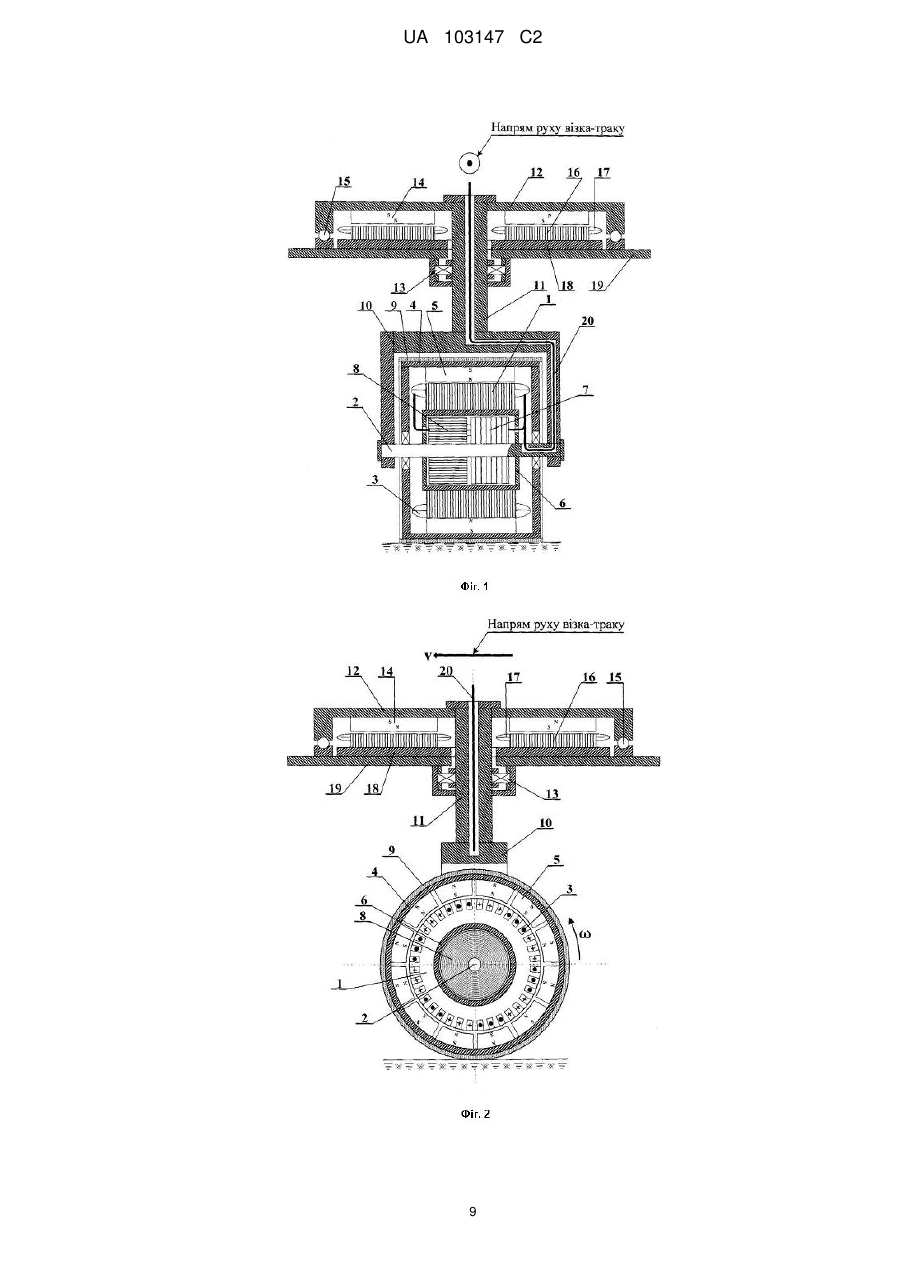
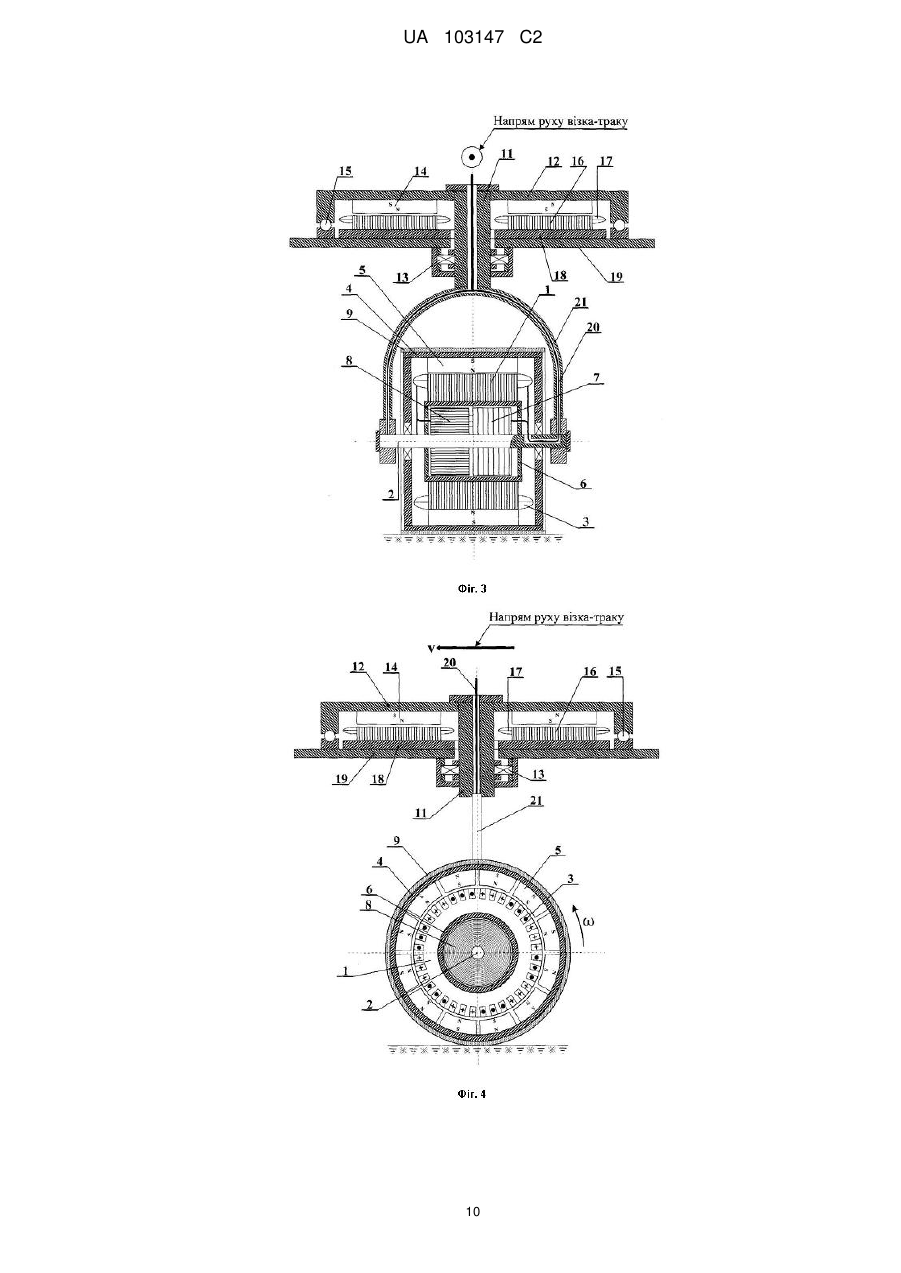
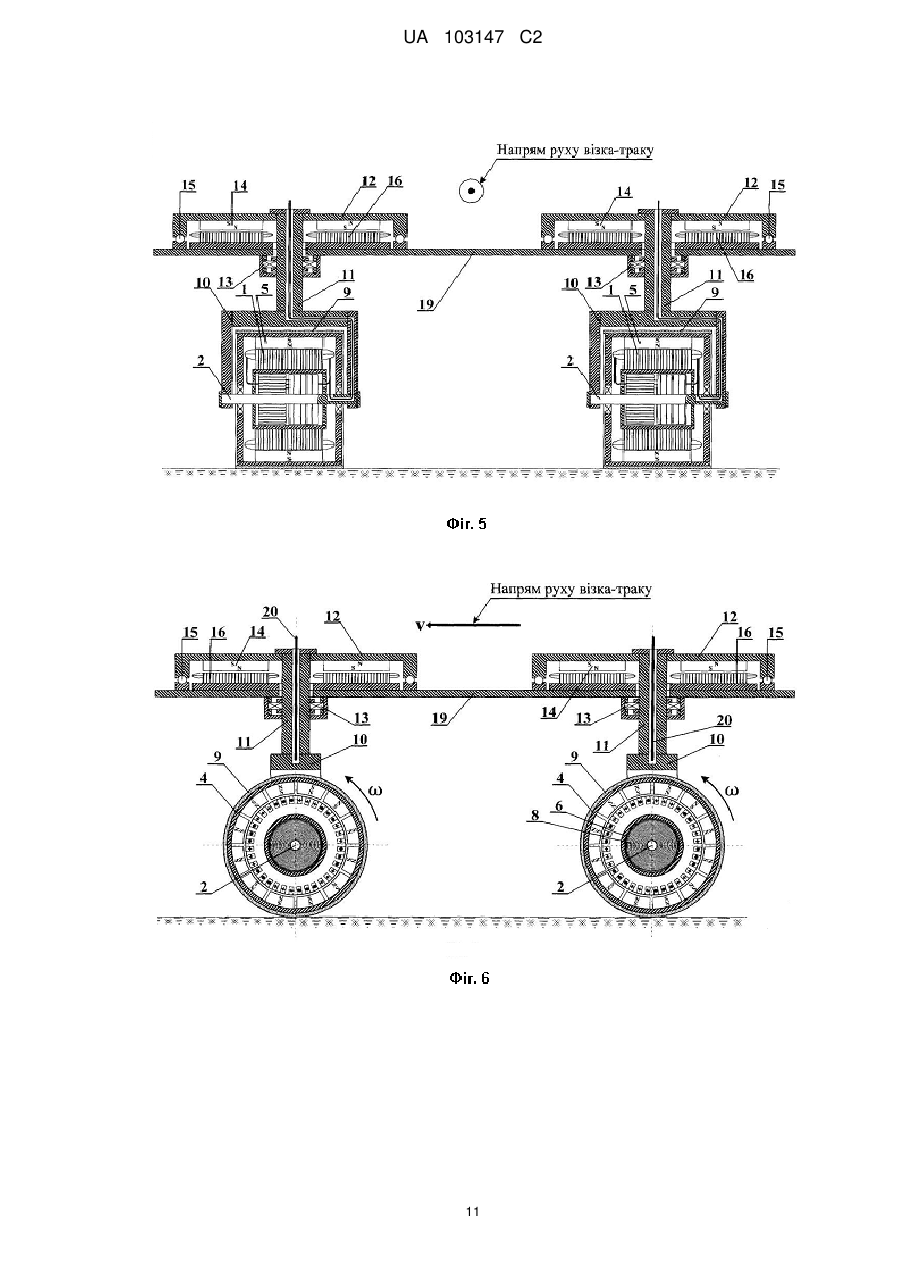
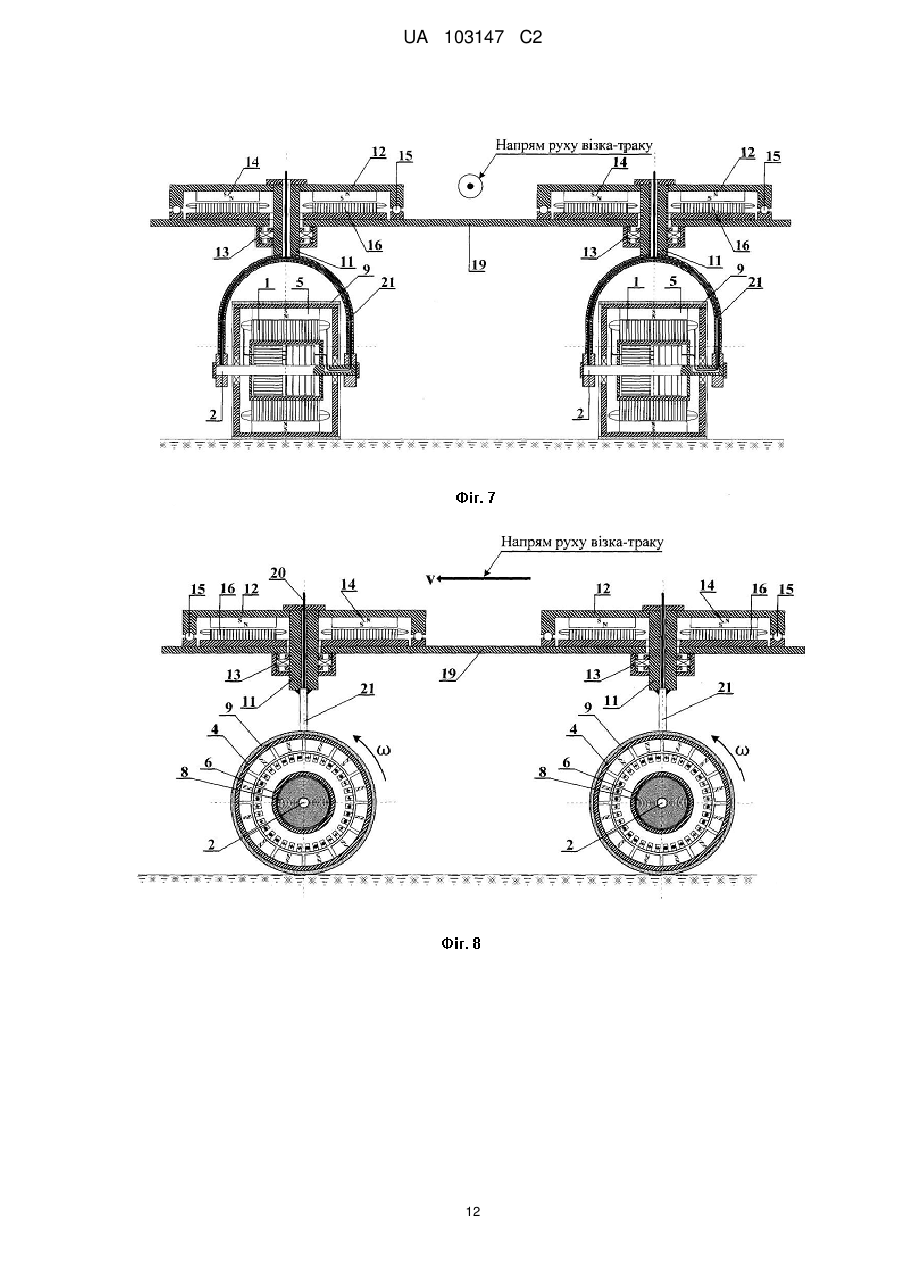
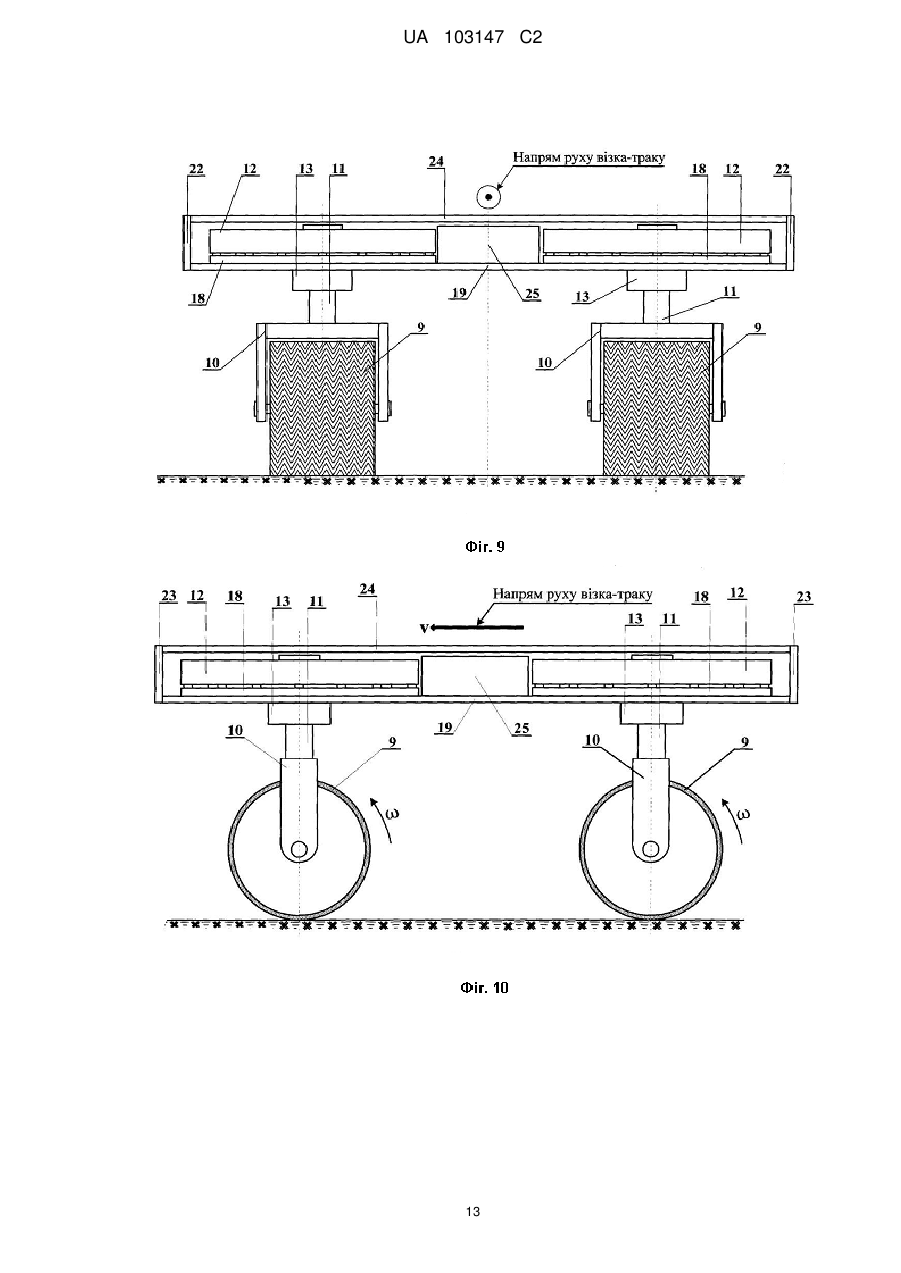
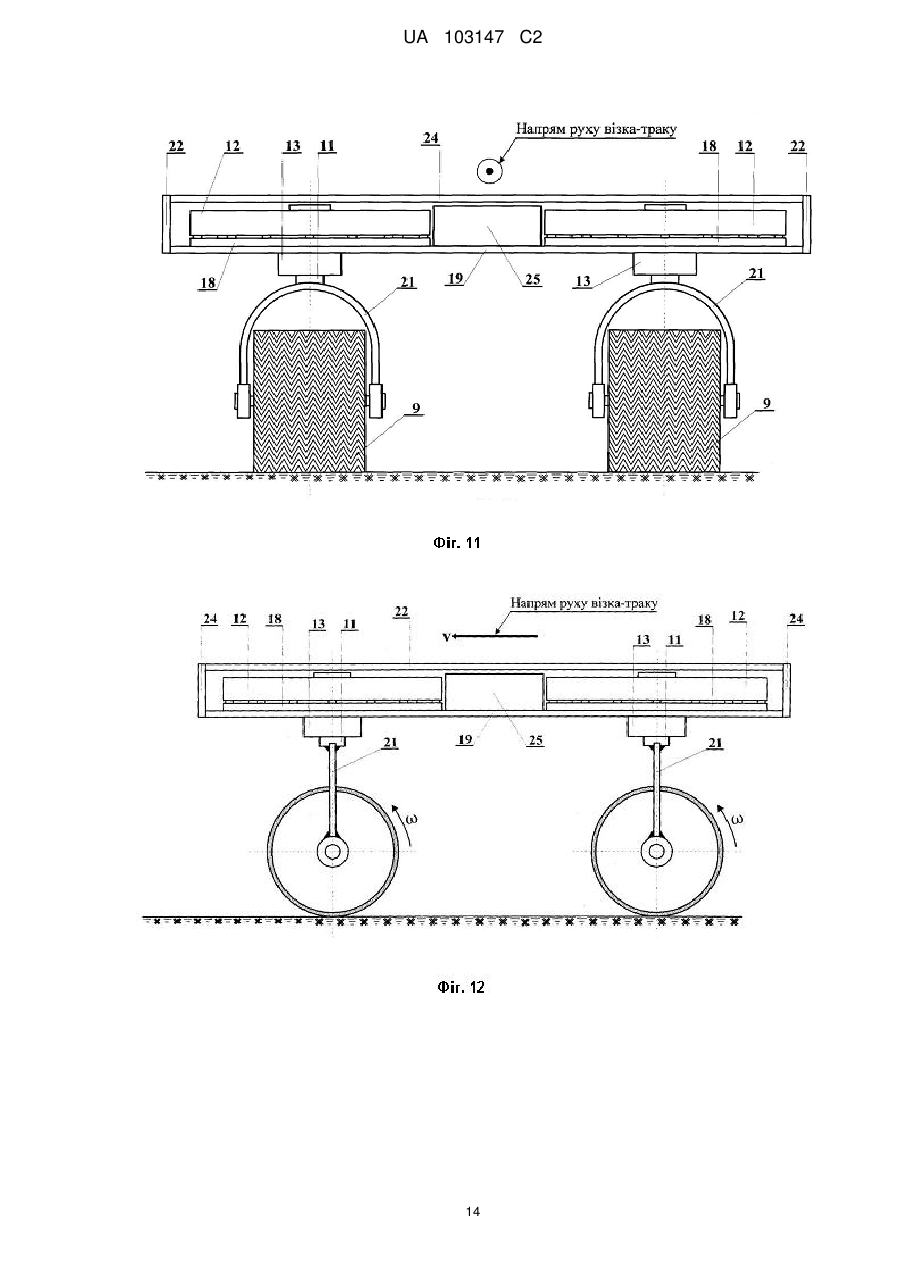
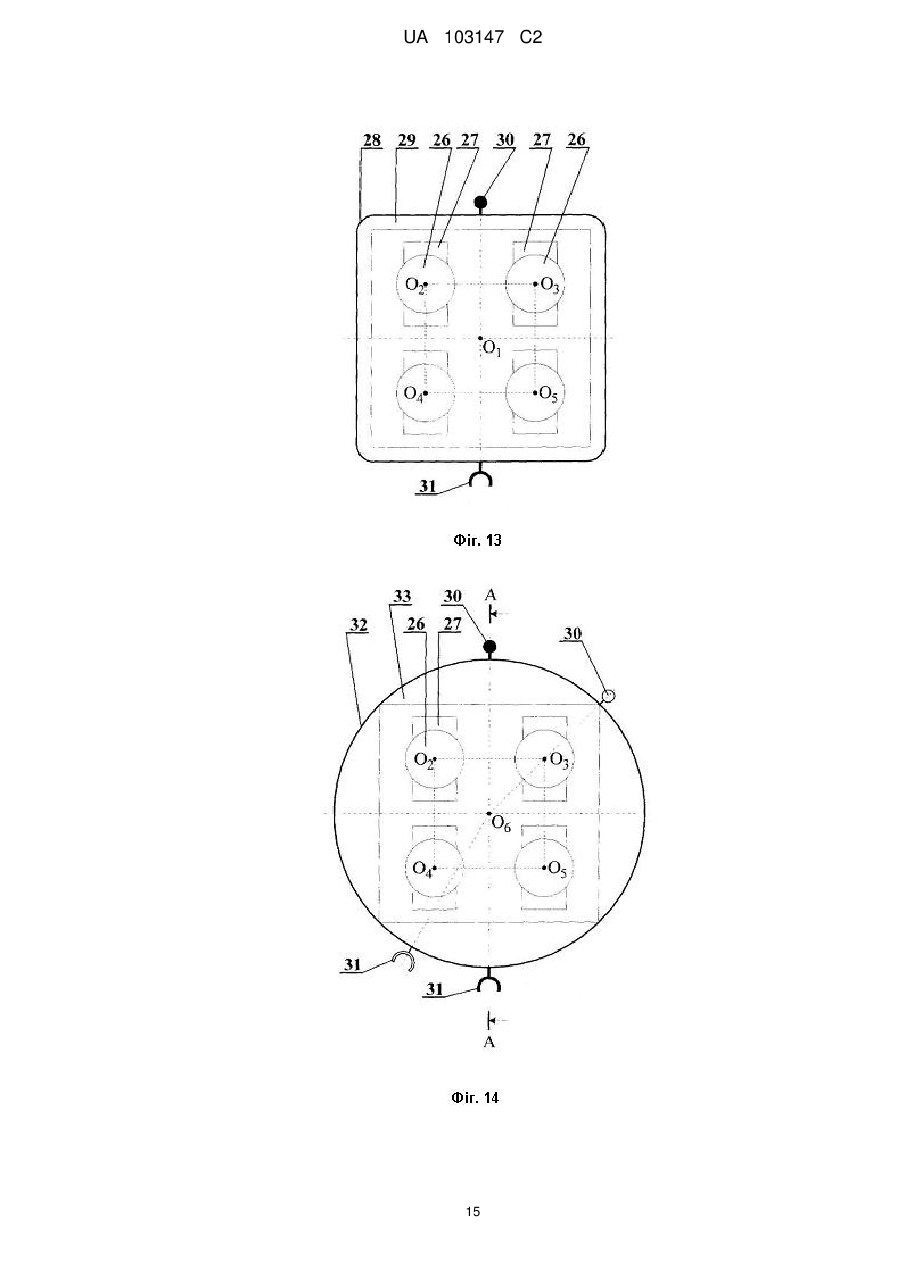
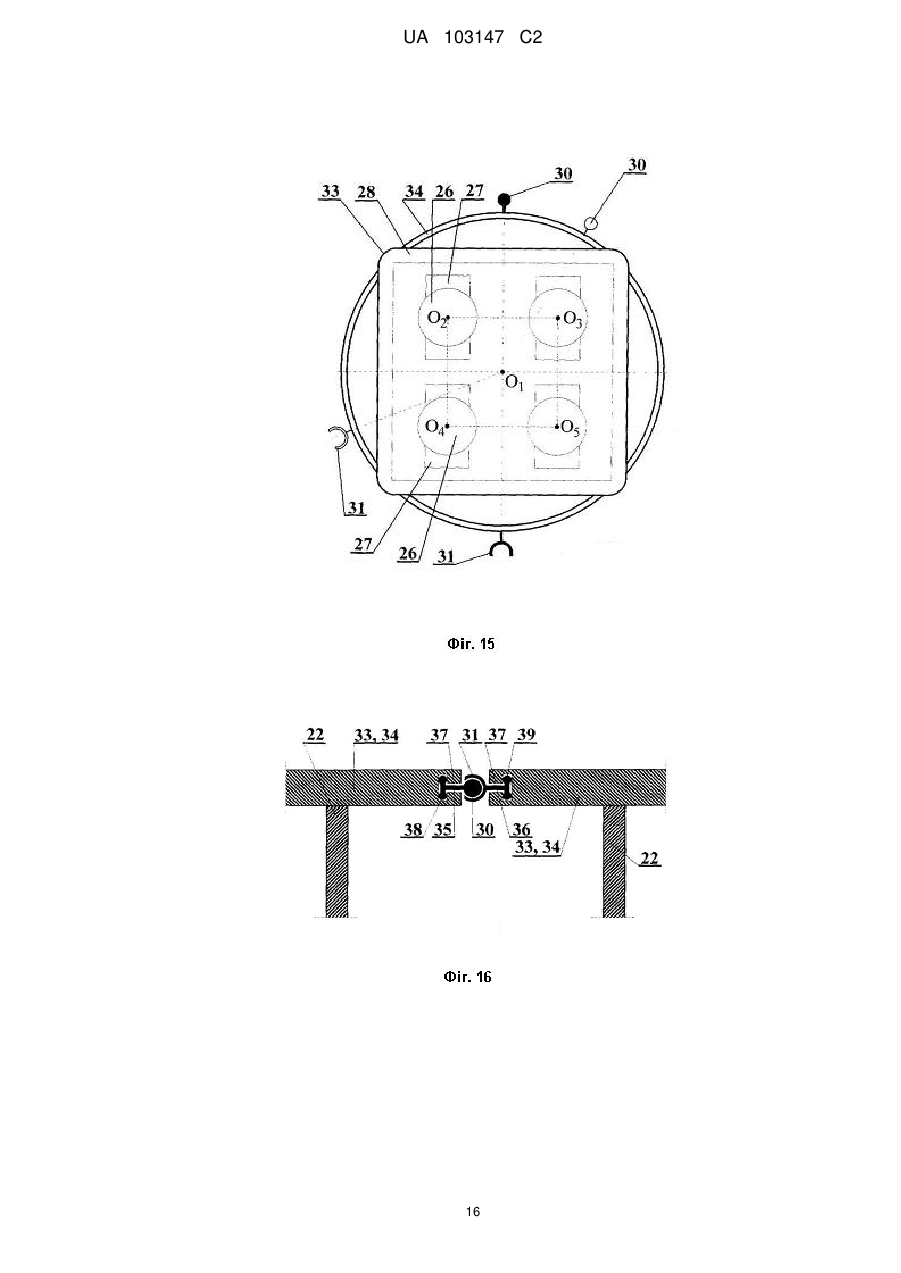
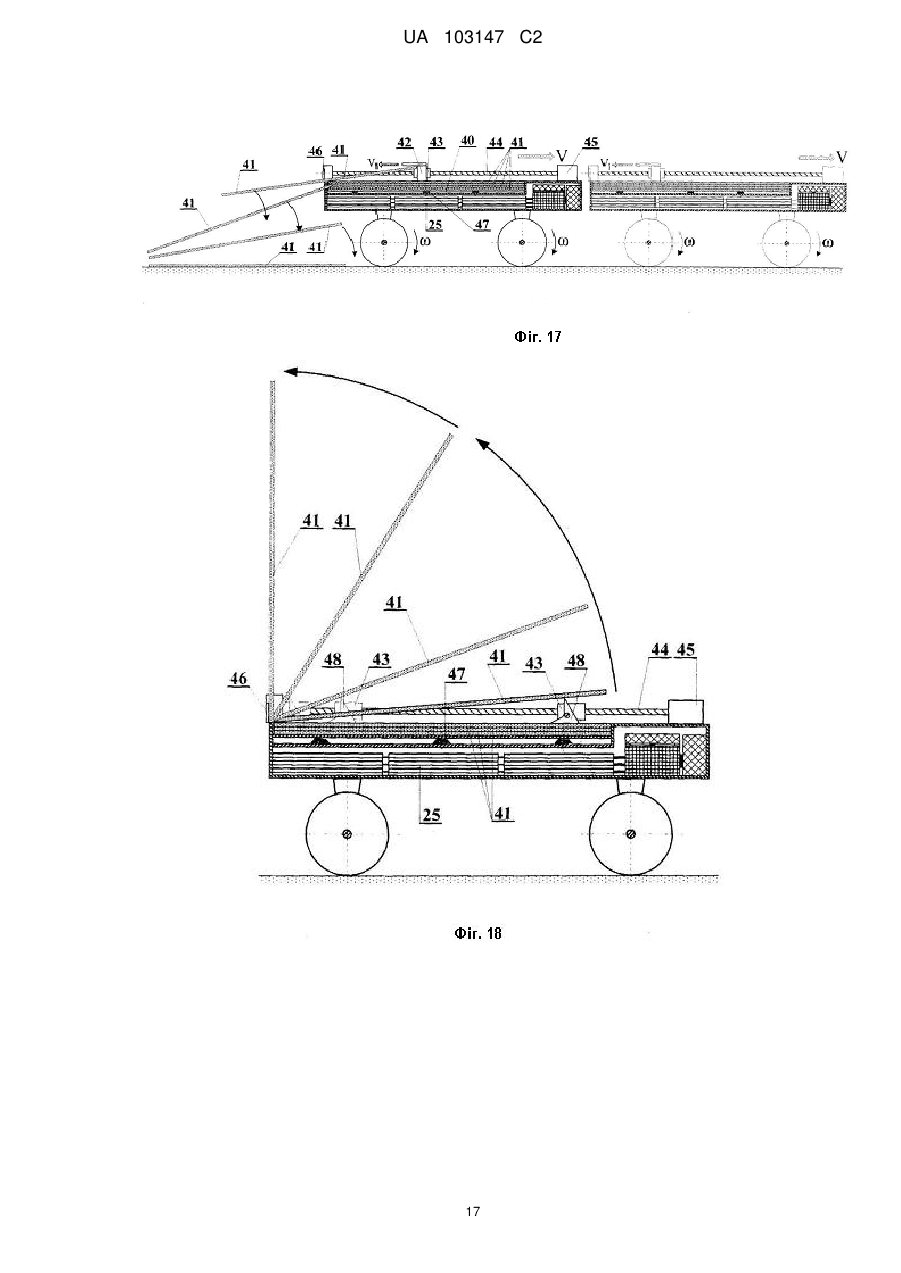
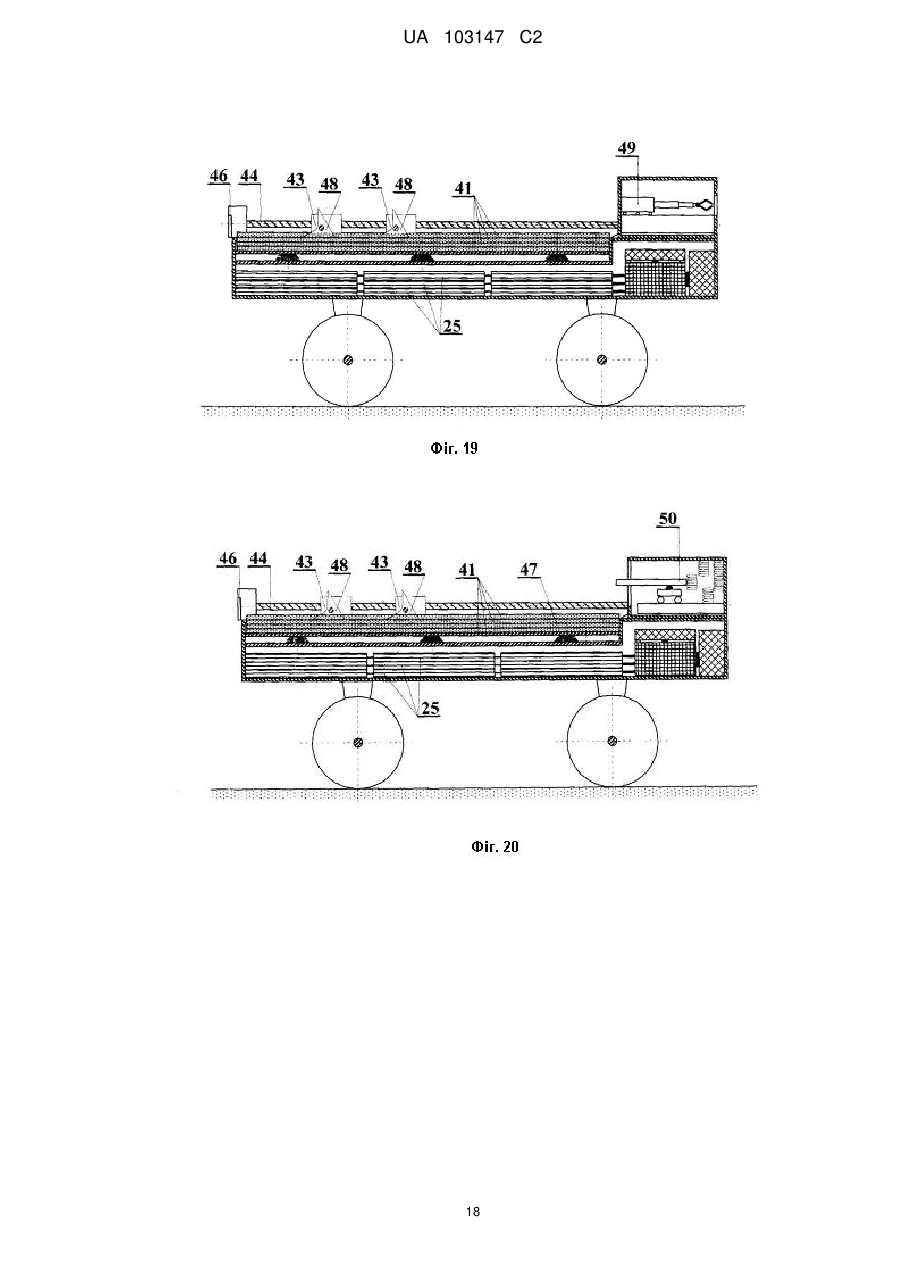
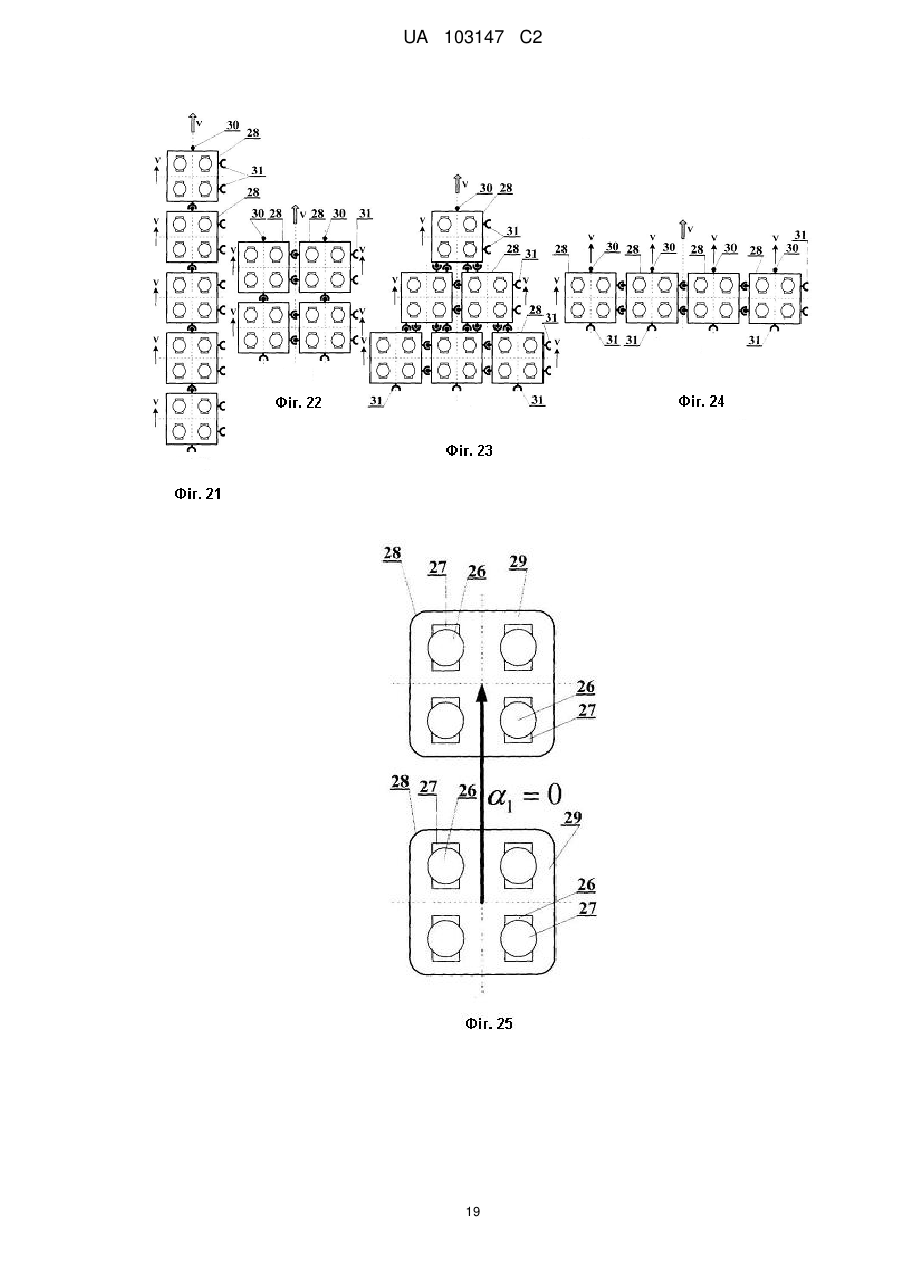
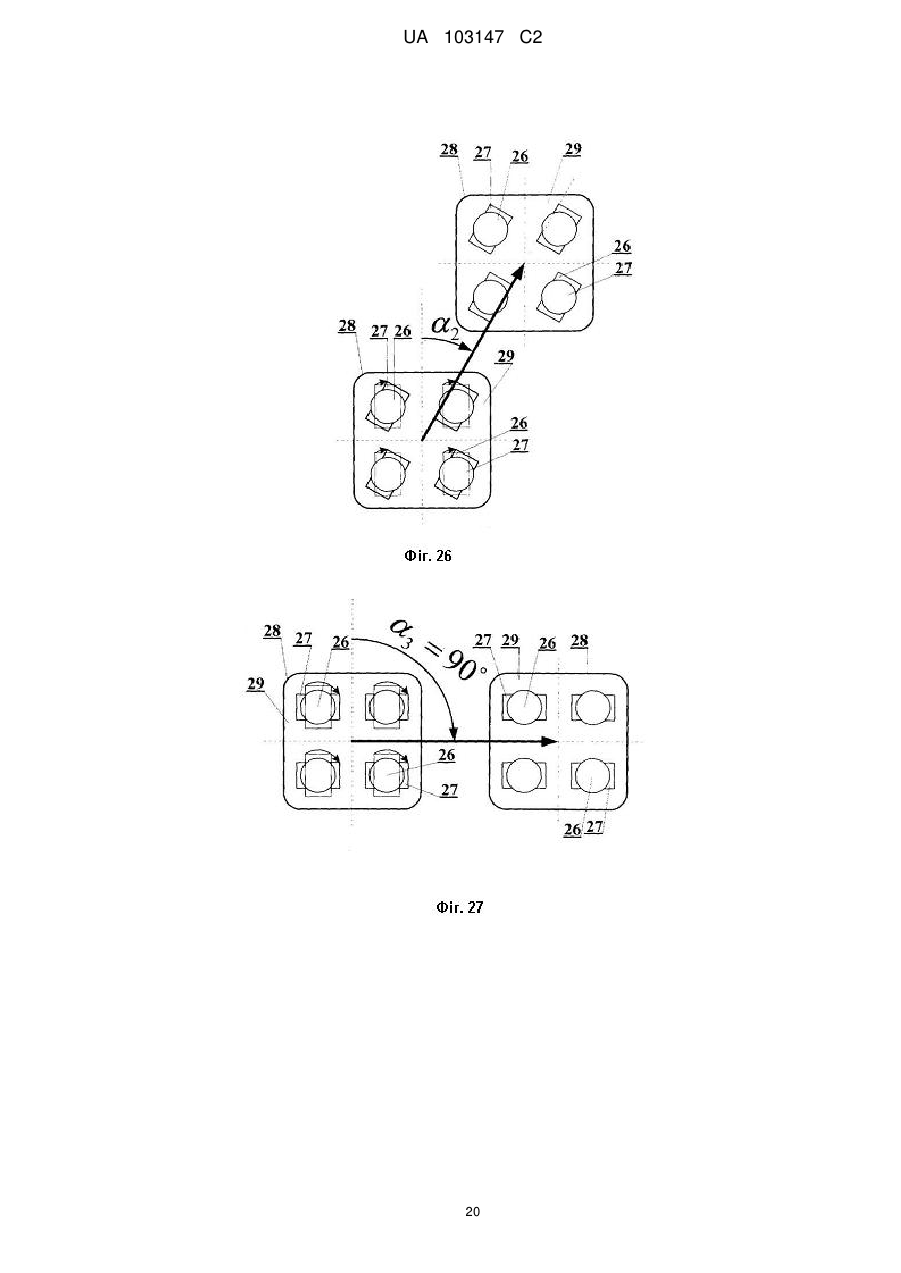
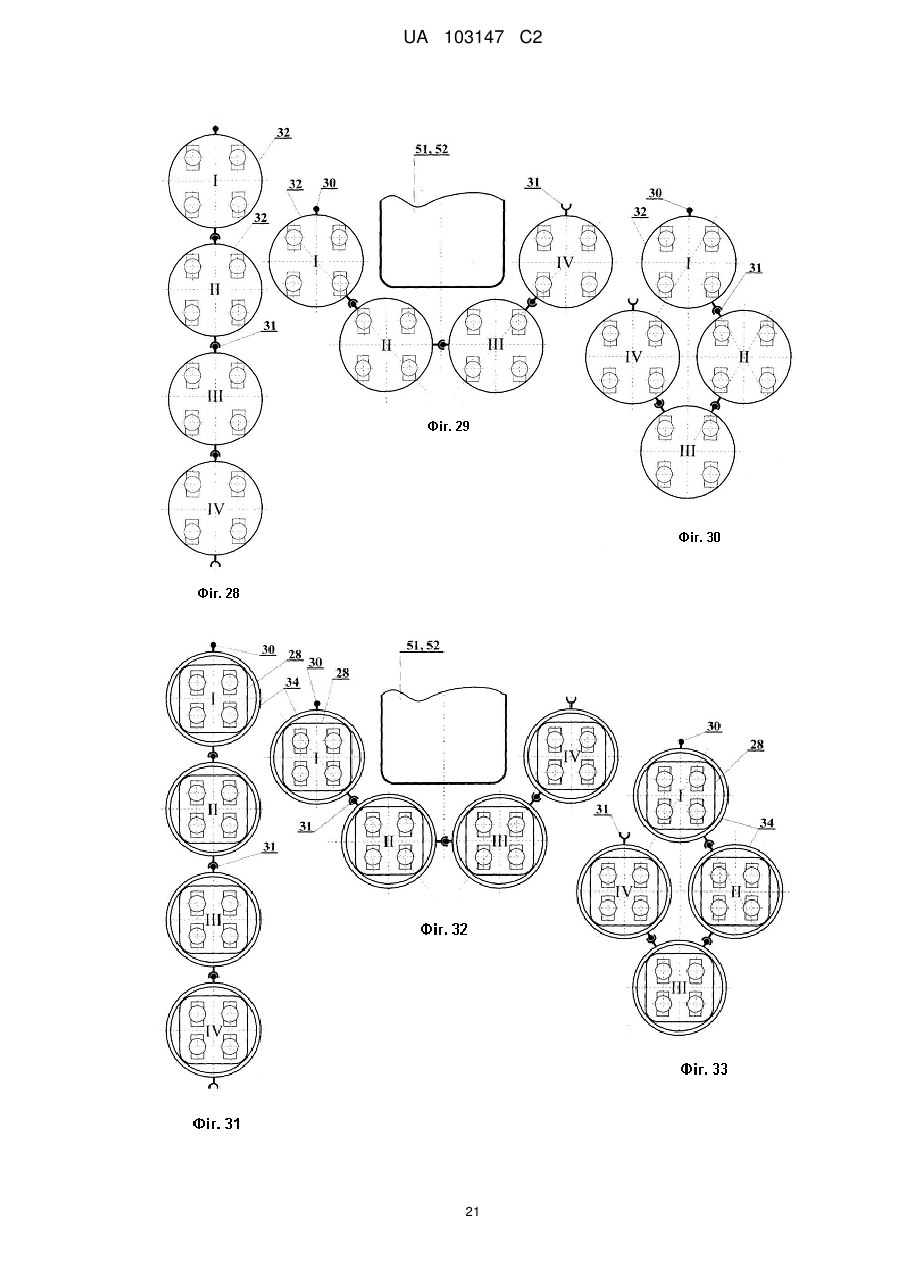
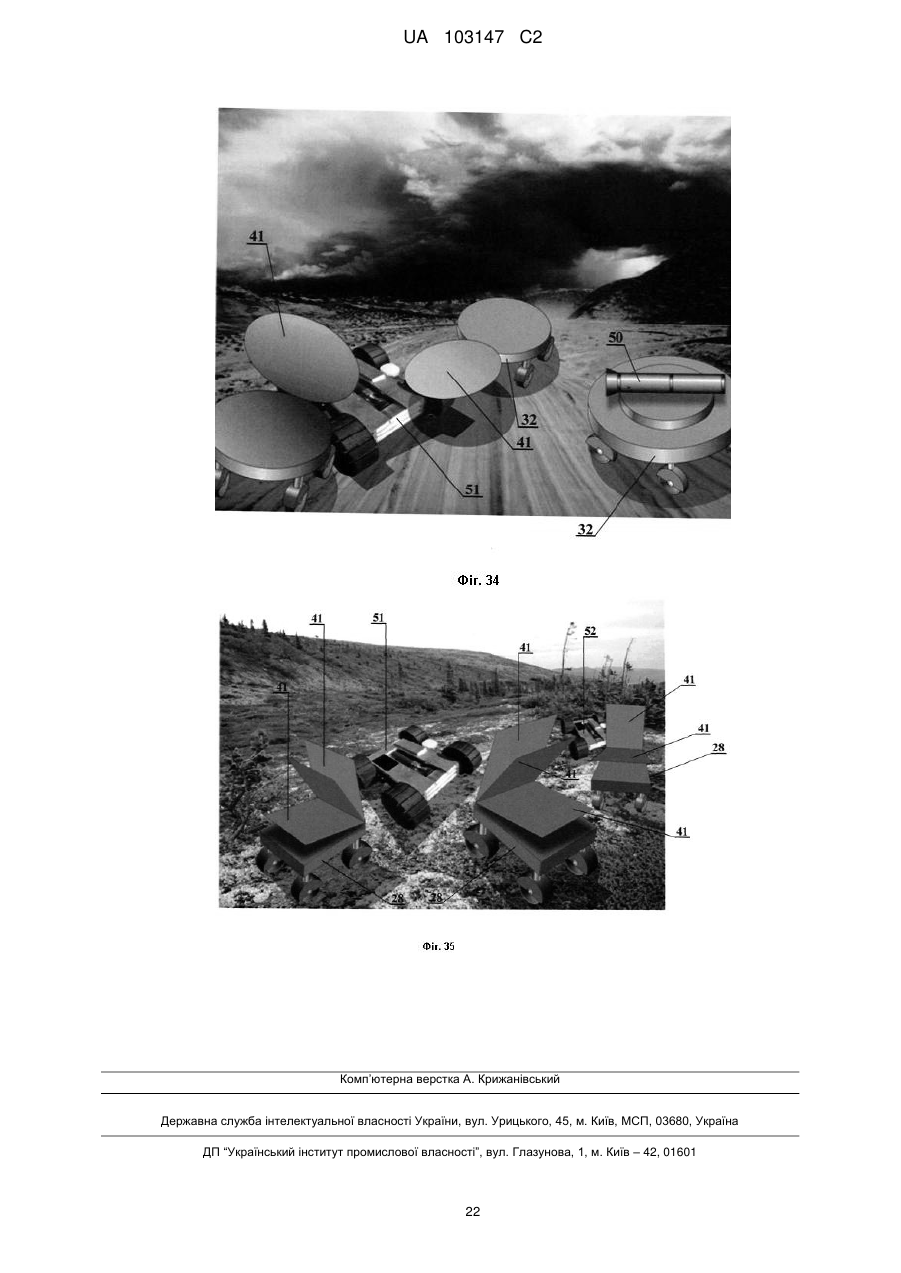
Реферат: Наземна військова модульна робототехнічна машина для протидії бойовій робототехніці противника призначена для використання в бойових і спеціальних операціях сухопутних військ як спеціалізована військова техніка жорсткого пригнічення бойової активності широкої номенклатури військових наземних роботів багатоцільового призначення. Наземна військова модульна робототехнічна машина є рухомою радіокерованою установкою, що складається з щонайменше одного енергетично автономного транспортного візка-трака, виконаного з можливістю об'єднання за допомогою шарнірних з'єднань з щонайменше одним подібним візком-траком в транспортний блок, виконано у вигляді плоскої платформи з кронштейнами для кріплення опорних коліс, забезпеченої повнопривідним електромеханічним UA 103147 C2 (12) UA 103147 C2 рушієм колісного, гусеничного або комбінованого типу, в опорні колеса якого вбудовані тягові привідні електричні двигуни, причому плоска платформа візка-трака із закріпленим на ній функціональним устаткуванням протидії, забезпечена захищеними внутрішніми порожнинами для розміщення джерел електроенергії електрохімічного або накопичувального, або комбінованого типів перетворювачів електроенергії для живлення електродвигунів, датчиків системи керування електродвигунами, бортового електронно-обчислювального устаткування керування і зв'язку, привідних пристроїв і механізмів маніпуляторів, озброєння і допоміжного устаткування, датчиків розвідки і параметрів зовнішньої обстановки. Згідно з винаходом, в платформу вбудовані плоскі торцеві електродвигуни повороту опорних коліс, електрично зв'язані з тяговими привідними електродвигунами, на вертикальному валу кожного з яких, встановленому у підшипниковому вузлі, жорстко закріплені кронштейни відповідних опорних коліс, причому вертикальні вали торцевих електродвигунів повороту розташовані у вершинах квадрата, вертикальна вісь симетрії якого співпадає з вертикальною віссю симетрії платформи, а функціональне устаткування протидії додатково включає в себе встановлений на щонайменше одному візку-траку комплекс радіоелектронного пригнічення працездатності приймально-передавальної радіоапаратури бойової робототехніки противника. UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід, що пропонується, належить до області військової техніки, а саме, до рухомих наземних військових робототехнічних агрегатів і установок, які спеціально призначені для проведення прихованої ефективної протидії бойовому функціонуванню широкої номенклатури бойової наземної робототехніці противника, що має розвинені системи транспорту, розвідки і озброєння, які забезпечено сучасними пристроями зовнішнього безпровідного управління і зв'язку. Пропонована наземна військова модульна робототехнічна машина є контрроботом для протидії бойовій робототехніці противника є новим зразком озброєння і військової техніки, що спеціально створено для жорсткого, швидкого і надійного пригнічення бойовій активності різних типів наземних бойових роботів багатоцільового призначення. Детальне вивчення сучасної технічної літератури по темі показало, що в даний час у відкритих виданнях відомості про спеціалізовані робототехнічні машини-контрроботи, які націлені виключно на протидію бойовій робототехніці противника, відсутні. Конструктивно найбільш близькими до робототехнічних машин пропонованого типу є технічні рішення згідно з патентами України № 95730 від 25.08.2011 на винахід під назвою "Модульноструктурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників" (Поповіченко О.В., Толстой О.В., Клименко В.Μ., Беліков В.Т., Васильєв В.В.), № 99033 від 10.07.2012 р. на винахід під назвою "Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки" (Беліков В.Т., Борисюк М.Д., Дяченко О.Ф., Клименко В.М., Магерамов Л.К.-А., Толстой О.В., Янчик О.Г.), № 99214 від 25.07.2012 на винахід під назвою "Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави" (Толстой О.В., Клименко В.М Коваль А.А., Беліков В.Т., Грачов М.М., Васильєв В.В.). Загальним принципом конструктивної побудови практично всіх наземних бойових робототехнічних машин (БРТМ), які описано у вказаних вище патентах, є те, що їх структура є гнучким відрізком гусеничної стрічки, що складається з набору шарнірно зв'язаних дискретних транспортних елементів, кожен з яких виконаний у вигляді візка-трака. Така робототехнічна машина забезпечена електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення як тягових електричних двигунів, так і решти споживачів електричної енергії. Вона несе на собі комплекс датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, бортовий комп'ютер, а так само комплект виконавчих механізмів, зокрема маніпуляторів, системи озброєння і самоліквідації і ряд інших подібних пристроїв, необхідних для повноцінного функціонування БРТМ. Найбільш істотним недоліком всіх сучасних військових наземних робототехнічних пристроїв загального і спеціального призначення є висока вартість їх розробки, серійного виробництва і експлуатації, доступна в даний час практично тільки державам з могутньою економікою, які високо розвинуті у військово-технічному відношенні. Повністю очевидно, що інші країни, які унаслідок самих різних внутрішніх і зовнішніх обставин не можуть дозволити собі почати переозброєння армії на основі широкого використання бойової робототехніки, активно прагнуть знайти адекватну, але не зв'язану з непомірним навантаженням на свою фінансову систему, відповідь на цей виклик, щоб не виявитися беззбройними перед лицем нових агресорів. Така адекватна відповідь, відповідно до цієї заявки на видачу патенту України на винахід, на нашу думку, полягає в розробці і створенні наземної військової модульної робототехнічної машини-контрробота для протидії бойовій робототехніці противника. Контрроботи можуть бути визначені як спеціальні робототехнічні машини жорсткої і упевненої протидії бойовому функціонуванню широкої номенклатури військових наземних роботів багатоцільового призначення, які протягом всіх останніх років інтенсивно проводяться, упроваджуються і активно використовуються в ході бойових дій збройними силами передових у військово-технічному відношенні зарубіжних країн, особливо країн-членів військового блоку НАТО. Бойове використання сучасних наземних робототехнічних машин і комплексів сприяє значному зниженню власних людських втрат при одночасному зростанні втрат живої сили супротивника. Повністю очевидно, що ці тенденції не можуть бути залишені без уваги військовополітичного керівництва тих країн, які в даний час унаслідок самих різних обставин не мають можливості швидкого подолання виниклого відставання в цій, одній з самих передових областей озброєння і військової техніки і до яких, в числі інших країн, належить Україна. 1 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 60 Разом з тим, слід зазначити, що неможливість прискореного досягнення упущеного паритету у вказаній області зовсім не свідчить про відсутність потенціалу асиметричної реакції з боку на перший погляд "слабкого" противника. В принципі тут слід взяти до уваги той очевидний факт, що для надання протидії функціонуванню військово-технічного об'єкту противника потрібний набагато нижчий рівень зовнішньої або внутрішньої дії на нього в порівнянні з відомими способами його повного фізичного усунення. Це показує, що конструктивно контрроботи повинні бути значно простіше і дешевше в порівнянні з тими наземними БРТМ, для протидії яким вони призначені. Природно і те, що вартість їх розробки, виготовлення і експлуатації так само опиниться, відповідно, набагато меншою. Разом з тим, обставиною принципового плану тут є те, що вимоги, що пред'являються до надійності бойового функціонування всіх елементів контрроботів, повинні бути такі ж високі, як і до аналогічних елементів бойових наземних робототехнічних машин загального застосування. Як відомо, високий ступінь надійності сучасних складних технічних пристроїв забезпечує їх конструювання на основі модульного принципу побудови. Отже, контрроботи в цілому, так само, як і їх основні складові елементи, необхідно розробляти, керуючись принципами модульного проектування. Це гарантує високий ступінь взаємозамінності, ремонтопридатності і, відповідно, зниження експлуатаційних витрат при бойовому застосуванні контрроботів. На наш погляд, високий рівень надійності бойового функціонування контрроботів, в першу чергу, визначається надійною роботою їх системи управління. Тут слід рекомендувати як найбільш надійних системи управління, яки мають дротяні електричні або оптико-волоконні зв'язки з операторами контрроботів. Основні принципи протидії з боку контрроботів бойовим наземним робототехнічним машинам потенційного противника вироблені на основі детального аналізу недоліків існуючих наземних бойових робототехнічних машин і комплексів. Контрроботи, призначені, наприклад, для припинення бойового функціонування мало- і середньогабаритних радіокерованих робототехнічних машин противника повинні нести портативне малоенергоємне устаткування для постановки інтенсивних радіоперешкод і бути забезпечені набором спеціальних відокремлюваних жорстких плоских елементів системи повного гальмування коліс або гусениць рушія БРТМ противника. Виходячи з вищенаведених міркувань і їх аналізу, як прототип винаходу, що пропонується, прийнята наземна військова модульна робототехнічна машина-контрробот для протидії бойовій робототехніці противника згідно з патентом України № 96693 від 25.11.2011р. на винахід під назвою "Допоміжна наземна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями" (Поповіченко О.В., Толстой О.В., Клименко В.М., Беліков В.Т., Васильєв В.В.). Наземна БРТМ, що вибрана як прототип, виконана у вигляді одного або набору лінійно розміщених один за одним транспортних площадок-траків невеликої висоти, в кожному з опорних привідних коліс рушіїв яких вбудовано не тільки тяговий привідний електричний двигун оберненої конструкції, але і джерело електричної енергії електрохімічного або накопичувального типу, яке суміщене з її статичним перетворювачем. Транспортні візки-траки об'єднані в гнучкий лінійний транспортний конструктив за допомогою шарнірних з'єднань, який схожий на гнучкий елемент гусеничної стрічки. На зовнішніх поверхнях вантажних візків-траків можуть бути закріплені різноманітні функціональні блоки-модулі БРТМ-прототипу. Недоліки БРТМ-прототипу, визначені в плані перспектив його використання як БРТМконтрробота, поміщені в тому, що у прототипу: відсутні прості і економічно вигідні пристрої протидії бойовому функціонуванню наземної робототехніці супротивника; кінематика системи управління поворотом візків-траків не здатна забезпечити простоту реалізації і високу динаміку проведення цієї операції; відсутня система структурної трансформації кінематики конструктиву, що розширює функціональний потенціал протидії. Задачу усунення вказаних вище недоліків прототипу вирішено в запропонованій наземній військовій модульній робототехнічній машині-контрроботі для протидії бойовій робототехніці противника таким чином. Вона повинна бути виконана як мобільна установка модульного типу, що складається з однієї або комплекту механічно об'єднаних і енергетично автономних транспортних візків-траків, кожний з яких є плоскою платформою з кронштейнами для кріплення опорних коліс, яка забезпечена повнопривідним електромеханічним рушієм колісного, гусеничного або комбінованого типу, в опорні колеса якого вбудовані привідні 2 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 широкорегульовані електричні двигуни, причому плоска платформа візка-трака із закріпленим на ній функціональним устаткуванням протидії має захищені внутрішні порожнини для розміщення джерел електроенергії електрохімічного, накопичувального або комбінованого типів, перетворювачів електроенергії для живлення автономних тягових привідних двигунів електромеханічного рушія платформи, путніх датчиків системи управління приводними двигунами, бортового електронно-обчислювального устаткування управління і зв'язку, привідних пристроїв і механізмів маніпуляторів, озброєння і допоміжного устаткування, датчиків розвідки і параметрів зовнішньої обстановки. Новизна технічного рішення полягає тут у тому, що блок кронштейна кожного з опорних коліс електромеханічного рушія візка-трака встановлений на вертикальній осі, безпосередньо і жорстко закріпленою на вертикальній осі плоского електродвигуна торцевого типу; автономні візки-траки контрробота за допомогою шарнірних зв'язок об'єднані один з одним в транспортний блок, що має оптимізовану просторову функціональну структуру, причому не менше чим на одному візку-траку встановлений комплекс радіоелектронного пригнічення працездатності приймальнопередавальної радіоапаратури бойової робототехніці противника. Удосконалення кінематики робототехнічної машини-контрробота, що запропоновано, в порівнянні з прототипом полягає в тому, що геометрична структура плоских платформ візківтраків, що є основними складовими елементами цих бойових машин, повинна мати функціонально оптимальні геометричні контури верхніх площин вказаних платформ а так само функціонально оптимальну геометрію взаємного відносного розташування вертикальних осей торцевих електродвигунів повороту опорних коліс. У основу визначення вказаних структурних параметрів покладені фундаментальні положення математичної теорії симетрії згідно до монографії Шубникова О.В. і Копцика В.А. Симетрія в науці і мистецтві - М.: Наука, 1972. - с. 240) в її застосуванні до конструювання технічних об'єктів. Згідно з принципами цієї теорії технічний об'єкт побудований геометрично закономірно, або правильно, якщо його можна без залишку розділити на рівні частини щодо деякої геометричної ознаки. Виходячи з цих міркувань, як дві основні конструктивні геометричні форми верхньої кришки візка-трака, які здатні найкращим чином забезпечити функціональну оптимальність військової робототехнічної машини-контрробота, запропоновано використовувати квадрат і круг. У теперішній заявці запропоновано застосувати три варіанти геометричної форми верхньої кришки плоскої платформи візка-трака - квадратну, круглу і квадратну із зовнішнім круговим кільцем. При цьому в першому і третьому випадках вертикальні осі торцевих двигунів повороту повинні бути розміщені у вершинах квадрата, вертикальна вісь симетрії якого співпадає з вертикальною віссю квадрата верхньої кришки платформи, а в другому випадку вертикальна вісь симетрії вищезгаданого квадрата співпадає з вертикальною віссю круга верхньої кришки платформи. Для об'єднання складених візків-траків в єдиний функціональний конструктив запропоновано використовувати сферичні шарнірні з'єднання. Якщо всі верхні кришки плоских платформ візків-траків, складових агрегат військової машини-контрробота, мають квадратну форму, то складові елементи сферичних шарнірів жорстко встановлені на вертикальних гранях вказаних верхніх кришок. При установці на плоскі платформи візків-траків верхніх кришок кругової форми і закріпленні на квадратних верхніх кришках зовнішніх кругових кілець в них по зовнішньому периметру може бути виконана кругова Т-подібна виїмка, в якій з можливістю вільного переміщення по периметру верхньої круглої кришки розміщені кінцеві виступи складових частин сполучних шарнірів. У зв'язку з тим, що максимальний ефект жорсткого пригнічення бойової активності широкої номенклатури військових наземних роботів багатоцільового призначення може бути досягнутий наземною військовою модульною робототехнічною машиною-контрроботом для протидії бойовій робототехніці противника, яку запропоновано, тільки в процесі практично безпосереднього механічного контакту контрробота з робототехнікою противника, яка йому протистоїть, як протидіючі елементи, якими забезпечений цей контрробот, запропоновано використовувати пластини з клейовими поверхнями, використовувані як для зупинки привідних коліс або гусеничних стрічок рушіїв роботів противника, так і для постановки механічної перешкоди його променевим датчикам. Максимальне наближення одиниць протидіючої бойової робототехніці один до одного так само забезпечує пригнічення радіозв'язку противника за допомогою радіоглушників невеликої потужності, що приводить до здешевлення пропонованих контрроботів в порівнянні з бойовою наземною робототехнікою противника. 3 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 На кресленнях, що ілюструють конструктивну суть наземної військової модульної робототехнічної машини-контрробота для протидії бойовій робототехніці противника, що запропоновано, представлені: Фіг. 1 Перший конструктивний варіант тягового і торцевого поворотного приводів електромеханічного рушія візка-трака модульної робототехнічної машини-контрробота, поперечний розріз відносно до напряму руху візка-трака; Фіг. 2 Перший конструктивний варіант тягового і торцевого поворотного приводів електромеханічного рушія візка-трака модульної робототехнічної машини-контрробота, подовжній розріз відносно до напряму руху візка-трака; Фіг. 3 Другий конструктивний варіант тягового і торцевого поворотного приводів електромеханічного рушія візка-трака модульної робототехнічної машини-контрробота, поперечний розріз відносно до напряму руху візка-трака; Фіг. 4 Другий конструктивний варіант тягового і торцевого поворотного приводів електромеханічного рушія візка-трака модульної робототехнічної машини-контрробота, подовжній розріз у напрямі руху візка-трака; Фіг. 5 Транспортний візок-трак, відповідний першому конструктивному варіанту електромеханічних приводів тяги і повороту, поперечний розріз відноснодо напряму руху візкатрака; Фіг.6 Транспортний візок-трак, відповідний першому конструктивному варіанту електромеханічних приводів тяги і повороту, подовжній розріз відносно до напряму руху візкатрака; Фіг. 7 Транспортний візок-трак, відповідний другому конструктивному варіанту електромеханічних приводів тяги і повороту, поперечний розріз відносно до напряму руху візкатрака; Фіг. 8 Транспортний візок-трак, відповідний другому конструктивному варіанту електромеханічних приводів тяги і повороту, подовжній розріз відносно до напряму руху візкатрака; Фіг. 9 Загальний вигляд спереду першого конструктивного варіанта транспортного візкатрака (передня кришка корпусу площадки знята); Фіг. 10 Загальний вигляд збоку першого конструктивного варіанта транспортного візка-трака (бічна кришка корпусу площадки знята); Фіг. 11 Загальний вигляд спереду другого конструктивного варіанта транспортного візкатрака (передня кришка корпусу площадки знята); Фіг. 12 Загальний вигляд збоку другого конструктивного варіанта транспортного візка-трака (бічна кришка корпусу площадки знята); Фіг. 13 Кінематична схема розміщення опорних коліс рушія і їх поворотних торцевих двигунів на платформі квадратного типу з жорстко закріпленими складовими елементами шарнірних з'єднань, загальний вигляд візка-трака зверху; Фіг. 14 Кінематична схема розміщення опорних коліс рушія і їх поворотних торцевих двигунів на платформі круглого типу з складовими елементами шарнірних з'єднань, встановленими з можливістю вільного кругового переміщення, загальний вигляд візка-трака зверху; Фіг. 15 Кінематична схема розміщення опорних коліс рушія і їх поворотних торцевих двигунів на платформі квадратного типу з круглими кільцями для установки складових елементів шарнірних з'єднань, встановленими з можливістю вільного кругового переміщення, загальний вигляд візка-трака зверху; Фіг. 16 Розміщення складових елементів шарнірних з'єднань візків-траків модульної робототехнічної машини-контрробота в Т-подібній круговій виїмці для забезпечення вільного взаємного переміщення плоских платформ з круглими верхніми кришками і кільцевими елементами квадратних верхніх кришок, поперечний розріз по А-А; Фіг. 17 Модульна робототехнічна машина-контрробот з скиданням протидіючих плоских елементів у вигляді пластин з клейовими поверхнями, вигляд збоку, подовжній розріз; Фіг. 18 Модульна робототехнічна машина-контрробот з підйомом протидіючих плоских елементів у вигляді пластин з клейовими поверхнями, вигляд збоку, розріз; Фіг. 19 Модульна робототехнічна машина-контрробот з маніпулятором, вигляд збоку, розріз; Фіг. 20 Модульна робототехнічна машина-контрробот з автоматичним стрілецьким озброєнням, вигляд збоку, розріз; Фіг. 21 Кінематична структура модульної робототехнічної машини-контрробота з квадратними платформами з послідовною схемою монтажу тягових транспортних модулів у напрямі основного тягового зусилля, вигляд зверху; 4 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 22 Кінематична структура модульної робототехнічної машини-контрробота з квадратними платформами при подовжньо-поперечній схемі монтажу візків-траків відносно до основного напряму ходу, вигляд зверху; Фіг. 23 Кінематична структура модульної робототехнічної машини-контрробота з квадратними платформами з трикутною подовжньо-поперечною схемою монтажу тягових модулів відносно до основного напряму ходу, вигляд зверху; Фіг. 24 Кінематична структура модульної робототехнічної машини-контрробота з квадратними платформами з послідовною схемою монтажу тягових транспортних модулів перпендикулярно напряму основного тягового зусилля, вигляд зверху; Фіг. 25 Кінематична схема поступального ходу функціонального складеного блока-модуля з квадратною платформою вперед (кут повороту = 0°), вигляд зверху; Фіг. 26 Кінематична схема поступального ходу функціонального складеного блока-модуля з квадратною платформою (кутом повороту 0) вигляд зверху; Фіг. 27 Кінематична схема поступального ходу функціонального складеного блока-модуля з квадратною платформою під прямим кутом до початкового, вигляд зверху; Фіг. 28 Кінематична схема чотириланкової модульної робототехнічної машини-контрробота з круглими платформами; Фіг. 29 Кінематика обхвату наземного робота противника чотириланковою модульною робототехнічною машиною-контрроботом з круглими платформами; Фіг. 30 Ромбоподібна функціональна структура чотириланкової модульної робототехнічної машини-контрробота з круглими платформами; Фіг. 31 Чотириланкова модульна робототехнічна машина-контрробот з квадратними платформами, забезпеченими кільцями для установки кінцевих частин складових елементів сполучних шарнірів; Фіг. 32 Кінематика обхвату наземного робота противника чотириланкової модульною робототехнічною машиною-контрроботом з квадратними платформами, забезпеченими кільцями для установки кінцевих частин складових елементів сполучних шарнірів; Фіг. 33 Ромбоподібна функціональна структура чотириланкової модульної робототехнічної машини-контрробота, забезпеченими кільцями для установки кінцевих частин складових елементів сполучних шарнірів; круглими платформами; Фіг. 34 Протидія робототехнічної машини-контрробота з круглими платформами, яку запропоновано, наземному роботу противника (дизайнерський варіант); Фіг. 35 Протидія робототехнічної машини-контрробота з квадратними платформами, яку запропоновано, наземному роботу противника (дизайнерський варіант). На фігурах 1, 2, 3 і 4 показано два можливі конструктивні варіанти виконання функціонального силового виконавчого блока-модуля електромеханічного рушія, що є основним елементом транспортної системи запропонованої наземної військової модульної робототехнічної машини-контрробота для протидії бойовій робототехніці противника. Силовий блок складається з тягового електричного двигуна, безпосередньо вбудованого в опорне колесо, що приводиться, і торцевого електродвигуна повороту цього колеса, ротор якого безпосередньо приводить в рух вісь кронштейна приводного колеса. Тяговий електричний двигун складається з нерухомого феромагнітного статора 1, жорстко закріпленого на нерухомому горизонтальному валу 2. У пазах магнітопровода статора укладена якірна обмотка 3. Феромагнітний ротор 4 двигуни несе висококоерцитивні постійні магніти 5, що створюють основне магнітне поле тягового двигуна. Статор 1 встановлений на циліндровому коробі 6, у внутрішній порожнині якого розміщена частина акумуляторів живлення 7 і перетворювач напруги 8. Ротор 4 тягового двигуну вбудований безпосередньо в обід 9 привідного колеса рушія. Кронштейн 10 жорстко закріплений на вертикальному валу 11, який безпосередньо пов'язаний з магнітопроводом 12 ротора торцевого поворотного електродвигуна і встановлений у вузлі підшипників 13 кочень. Магнітне поле збудження торцевого двигуна повороту створене висококоерцитивними постійними магнітами 14. Корпус 12 ротора торцевого двигуна повороту обертається в опорному підшипнику 15 кочення. Статор 16 торцевого двигуна повороту, що несе якірну обмотку 17, встановлений на горизонтальній кришці двигуна 18, закріпленій на нижній площині 19 платформи візка-трака. Електричний зв'язок з системою управління і зовнішніми джерелами електричної енергії здійснений за допомогою системи провідників 20. Другий конструктивний різновид виконавчого функціонального блока-модуля, показаний на фігурах 3 і 4, відрізняється від першого тим, що вертикальний вал 11 кронштейна закріплений на трубчастій U-подібній вилці 21, що несе опорне колесо з вбудованим тяговим двигуном, що певною мірою сприяє зниженню маси привідного блока без збитку для його міцнісних характеристик. 5 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 На фігурах 5, 6, 7 і 8 схематично у вигляді поперечного і подовжнього розрізів щодо напряму руху одного з візків-траків контрробота, який запропоновано, представлені компоновки конструкції його транспортної платформи з вбудованими тяговими двигунами опорних коліс рушія і торцевими двигунами їх повороту. Як випливає з представлених ілюстративних матеріалів, кожна платформа наземної військової модульної робототехнічної машиниконтрробота, що запропоновано, для протидії бойовій робототехніці противника обладнана чотирма повністю ідентичними функціональними блоками-модулями тягових електричних двигунів їх повороту навколо вертикальної осі, які забезпечені вузлами безпосереднього електричного дроту. Позиції на фігурах 5, 6, 7, і 8 повністю відповідають позиціям всіх чотирьох попередніх фігур. На фігурах 9, 10, 11 і 12 представлені в зборі загальні види візків-траків першого і другого конструктивних варіантів контрробота, що запропоновано. Порожнина платформи візка-трака утворюється на основі монтажу на нижній горизонтальній пластині 19 двох вертикальних бічних пластин 22, передньою і задньою вертикальних пластин 23, на яких закріплена верхня горизонтальна пластина 24. З метою досягнення повнішої інформативності показу компоновки елементів внутрішньої порожнини платформи візка-трака кожен її вид спереду (фігури 9 і 11) представлений із знятою передньою стінкою 23 платформи, а кожен вид збоку (фігури 10 і 12), відповідно, - із знятою бічною стінкою 22. Завдяки цьому відкривається огляд внутрішньої порожнини плоскої платформи візка-трака, і стають видними розміщені усередині деталі 12 і 18 торцевих електричних двигунів повороту, а так само джерела 25 електроживлення і перетворювачі. На фігурах 13, 14 і 15 у вигляді зверху представлені кінематичні схеми розміщення вузлів кріплення опорних коліс рушія і їх поворотних торцевих двигунів на платформах візків-траків з функціонально оптимальними геометричними контурами верхніх площин вказаних платформ, а так само функціонально оптимальною геометрією взаємного відносного розташування вертикальних осей торцевих електродвигунів 26 повороту опорних коліс 27. Плоска платформа візка-трака (фіг. 13), що є конструктивно завершеним функціональним складеним блоком-модулем 28 запропонованої військової робототехнічної машиниконтрробота, забезпечена квадратною верхньою кришкою 29, що забезпечує можливість її збирання у вигляді цілісного жорсткого або гнучкого плоского конструктиву без пропусків і проміжків. Для монтажу вказаного плоского конструктиву можуть бути використані складові елементи 30 і 31 шарнірних з'єднань. Складений функціональний блок-модуль 32, що представлений на фиг. 14, виконаний з верхньою кришкою 33 круглих форми. Це забезпечує можливість установки складових елементів 30 і 31 шарнірних з'єднань з можливістю їх вільного кругового переміщення по периметру кільця, що покращує кінематику запропонованої військової робототехнічної машиниконтрробота, підвищуючи її функціональні можливості. Паралельно сторонам квадрата верхньої кришки 29 (фіг. 13), симетрично його центральній вертикальній осі симетрії розміщений квадрат вертикальних осей симетрії поворотних торцевих двигунів 26, кожен з яких здатний повністю автономно, відповідно до команд системи управління тяговим електромеханічним приводом візка-трака проводити поворот опорних коліс 27 на задані кути. Повністю аналогічно розміщений квадрат вертикальних осей симетрії поворотних торцевих двигунів 26 щодо вертикальної осі симетрії круглої кришки 33 (фіг. 14). Як показано на фіг. 15, підвищення функціональних можливостей складеного функціонального блоку модуля 28 з верхньою кришкою 29 квадратної форми, аналогічне складеному функціональному блоку-модулю 32 візки-траки з круглою верхньою кришкою 33, може бути реалізовано шляхом закріплення на кришці 29 кругового кільця 34, в якому з можливістю вільного кругового переміщення встановлені складові елементи 30 і 31 шарнірних з'єднань. Представлена на фіг. 16 у вигляді поперечного розрізу по А-А кінематична схема розміщення кінцевих частин 35 і 36 складових елементів 30 і 31 шарнірних з'єднань візків-траків модульної робототехнічної машини-контрробота в Т-подібній круговій виїмці 37, виконану по периметру круглих верхніх кришок 33 або додаткових кільцевих елементів 34 квадратних верхніх кришок 29. Установка на кінцевих елементах 35 і 36 кулькових опор 38 і 39 забезпечує вільне безлюфтове взаємне переміщення плоских платформ, забезпечених круглими верхніми кришками 33 або кільцевими елементами 34 квадратних верхніх кришок 29, один щодо одного. Завдяки наявності такої функції досить просто здійснено динамічне пристосування конфігурації виконавчого конструктиву пропонованої модульної робототехнічної машини-контрробота до 6 UA 103147 C2 5 10 15 20 25 30 35 40 45 50 55 змін бойової обстановки. Очевидно, що це дозволить максимально ефективно і надійно вирішити задачу придавлення працездатності бойової робототехніці противника. На фіг. 17 у вигляді двох фаз роботи представлено конструктивного виконання одного з складених візків-траків пропонованої модульної робототехнічної машини-контрробота, яка обладнана пристроєм скидання на ґрунт на чітко певній трасі майбутнього проходу наземного бойового робота противника плоских елементів з клейовим покриттям для його гальмування і повної зупинки. Верхня платформа візка-трака забезпечена магазином 40 для горизонтального укладання елементів-пластин 41 з клейовим покриттям. Сама верхня з пластин 41 повинна бути встановлена так, щоб її нижня площина співпала з верхньою площиною кришок 29, 33. Решта всіх пластин 41, ті, що знаходяться нижче замкнуті фіксатором, на фіг. 17 не показаним. Зсув і скидання верхньої пластини 41 здійснюються двома відсікачами 42, закріпленими на гайках 43 двох паралельних горизонтальних ходових гвинтів 44. Привід ходових гвинтів в обертання проводиться електродвигунами 45, яки закріплені на верхній площині кришок 29, 33. Додаткова фіксація верхньої пластини 41 здійснена за допомогою двох симетрично встановлених заслінок 46. Для подачі пластин, що пролягають нижче, 41 на верхню площину кришок 29, 33 служать пружини 47. На фіг. 18 в тимчасовій розгортці показана друга модифікація конструкції пропонованої модульної робототехнічної машини-контрробота, у якій пластини 41 подаються з магазина 40 не на ґрунт, а встановлюються у вертикальне положення для постановки перешкод діям бойової робототехніці противника на верхньому рівні її конструкцій. З цією метою відсікач 42 забезпечений поворотним елементом 48, що приводиться в обертання окремим двигуном, не показаним у вигляді окремої позиції на фіг. 18. Різновиди конструктивних типів візків-траків, показані на фігурах 19 і 20, несуть на вірніше за площину кришок 29, 33 платформи блок маніпулятора 49 і автоматичного стрілецького озброєння 50, відповідно. Як випливає з аналізу кінематичних структур пропонованої модульної робототехнічної машини-контрробота, яку запропоновано, з тяговими транспортними блоками-модулями 28, що забезпечені квадратними кришками 29 плоских платформ, представленими на фігурах 21, 22, 23 і 24, на них як приклади можливої практичної реалізації вказаних просторових структур показані структури конфігурацій з послідовною, подовжньо-поперечною, трикутною подовжньопоперечною схемами монтажу тягових транспортних модулів у напрямі основного тягового зусилля і послідовною схемою монтажу тягових транспортних модулів перпендикулярно напряму основного тягового зусилля, відповідно. Як вже було вказано раніше, об'єднання функціональних транспортних блоків-модулів 28 в єдиний виконавчий конструктив проведено за допомогою сферичних шарнірів, що складаються з складених деталей 30 і 31. Завдяки такому способу монтажу виконавчий конструктив стає гнучким, що полегшує його рух в бойових умовах по пересіченій місцевості. Наземна військова модульна робототехнічна машина-контрробот для протидії бойовій робототехніці противника, яку запропоновано, працює таким чином. На підготовчому етапі на тих, що є в наявності повністю автономні транспортні функціональні блоки-модулІ 28, 33 у вигляді візків-траків, виходячи з аналізу умов майбутньої операції по організації протидії наземній рухомій і стаціонарній робототехніці противника, повинен бути визначений і встановлений на транспортних блоках-модулях комплект розвідувального і старанного устаткування і проведений вибір оптимальної геометричної структури виконавчого конструктиву. Комплекс підготовчих заходів має на меті забезпечення максимального ступеня пригнічення бойової активності противника у вказаному напрямі. Найбільш характерні приклади побудови можливих конфігурацій геометричних структур і їх трансформацій в ході бойових дій показані на фігурах 21, 22, 23, 24, 29 і 30. Як випливає з розгляду фігур 25, 26 і 27, повна кінематична розв'язка поворотів опорних коліс функціональних візків-траків 28, 33 дає можливість реалізації поступальних переміщень об'єднаного конструктиву під будь-яким кутом до первинного напряму його руху, що сприяє підвищенню динамічних характеристик запропонованої наземної військової модульної робототехнічної машини-контрробота. На фіг. 17 представлена схема бойового функціонування запропонованого контрробота при скиданні плоских пластин 41 з клейовим покриттям за допомогою відсікачів 42 на шляху проходження наземної робототехніці противника, а на фіг. 18 кінематична схема підйому плоских пластин 41 з клейовим покриттям. Запропонована наземна військова модульна робототехнічна машина-контрробот в процесі пригнічення працездатності наземних стаціонарних і рухомих бойових роботів супротивника 7 UA 103147 C2 5 може використовувати маніпулятори 49 і стрілецьке озброєння 50, модулі якого повинні бути закріплені на платформах візків-траків 28, 33, як це показано на фігурах 19 і 20. На фігурах 34 і 35 представлені варіанти бойового функціонування візків-траків 32, 34 в процесі протидії рухомим наземним роботам 51, 52 противника, що показані у вигляді художнього дизайнерського опрацювання. Очевидно, що це сприяє підвищенню ілюстративності наведених вище матеріалів цього опису. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 1. Наземна військова модульна робототехнічна машина для протидії бойовій робототехніці противника, яка є рухомою радіокерованою установкою, що складається з щонайменше одного енергетично автономного транспортного візка-трака, виконаного з можливістю об'єднання за допомогою шарнірних з'єднань з щонайменше одним подібним візком-траком в транспортний блок, виконаного у вигляді плоскої платформи з кронштейнами для кріплення опорних коліс, забезпеченої повнопривідним електромеханічним рушієм колісного, гусеничного або комбінованого типу, в опорні колеса якого вбудовані тягові привідні електричні двигуни, причому плоска платформа візка-трака із закріпленим на ній функціональним устаткуванням протидії забезпечена захищеними внутрішніми порожнинами для розміщення джерел електроенергії електрохімічного або накопичувального, або комбінованого типів перетворювачів електроенергії для живлення електродвигунів, датчиків системи керування електродвигунами, бортового електронно-обчислювального устаткування керування і зв'язку, привідних пристроїв і механізмів маніпуляторів, озброєння і допоміжного устаткування, датчиків розвідки і параметрів зовнішньої обстановки, яка відрізняється тим, що в платформу вбудовані плоскі торцеві електродвигуни повороту опорних коліс, електрично зв'язані з тяговими привідними електродвигунами, на вертикальному валу кожного з яких, встановленому у підшипниковому вузлі, жорстко закріплені кронштейни відповідних опорних коліс, причому вертикальні вали торцевих електродвигунів повороту розташовані у вершинах квадрата, вертикальна вісь симетрії якого співпадає з вертикальною віссю симетрії платформи, а функціональне устаткування протидії додатково включає в себе встановлений на щонайменше одному візку-траку, комплекс радіоелектронного пригнічення працездатності приймально-передавальної радіоапаратури бойової робототехніки противника. 2. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана квадратною та має верхню квадратну кришку, на якій закріплені складові елементи шарнірних з'єднань. 3. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана круглою та має верхню круглу кришку, на якій закріплені складові елементи шарнірних з'єднань. 4. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана круглою та має верхню круглу кришку, по периметру платформи виконана Т-подібна виїмка, в якій, з можливістю вільного переміщення по периметру, розміщені кінцеві виступи складових елементів шарнірних з'єднань. 5. Наземна військова модульна робототехнічна машина за п. 1, яка відрізняється тим, що плоска платформа виконана квадратною та має верхню круглу кришку, на якій закріплено кругове кільце, в якому по периметру виконана Т-подібна виїмка, в якій, з можливістю вільного переміщення по периметру верхньої кришки, розміщені кінцеві виступи складових частин шарнірних з'єднань. 6. Наземна військова модульна робототехнічна машина за пп. 1-5, яка відрізняється тим, що щонайменше один візок-трак забезпечений комплектом плоских пластин з клейовим покриттям і електромеханічними пристроями для їх фіксації і скидання. 8 UA 103147 C2 9 UA 103147 C2 10 UA 103147 C2 11 UA 103147 C2 12 UA 103147 C2 13 UA 103147 C2 14 UA 103147 C2 15 UA 103147 C2 16 UA 103147 C2 17 UA 103147 C2 18 UA 103147 C2 19 UA 103147 C2 20 UA 103147 C2 21 UA 103147 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 22
ДивитисяДодаткова інформація
Автори англійськоюDanyk Yurii Hryhorovych, Belikov Viktor Tryfonovych
Автори російськоюДаник Юрий Григорьевич, Беликов Виктор Трифонович
МПК / Мітки
МПК: F41H 7/00, B62D 9/00, B60K 7/00, F41H 13/00, B62D 61/00
Мітки: машина-контрробот, протидії, наземна, робототехніці, бойовій, противника, військова, робототехнічна, модульна
Код посилання
<a href="https://ua.patents.su/24-103147-nazemna-vijjskova-modulna-robototekhnichna-mashina-kontrrobot-dlya-protidi-bojjovijj-robototekhnici-protivnika.html" target="_blank" rel="follow" title="База патентів України">Наземна військова модульна робототехнічна машина-контрробот для протидії бойовій робототехніці противника</a>
Бойова модульна наземна робототехнічна машина постійного мониторингу і охорони (захисту) стратегічних об`єктів та кордонів держави
Номер патенту: 99214
Опубліковано: 25.07.2012
Автори: Клименко Вадим Миколайович, Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Коваль Андрій Андрійович, Васильєв Валерій Валентинович, Грачьов Микола Миколайович
МПК: F41H 7/00
Мітки: моніторингу, охорони, стратегічних, держави, захисту, кордонів, постійного, наземна, машина, робототехнічна, об'єктів, модульна, бойова
Формула / Реферат:
1. Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави, що складається з набору функціональних блоків-модулів у вигляді комплекту елементів електроживлення електрохімічного або накопичувального типу, перетворювачів електроенергії, датчиків навколишнього оточення, маніпуляторів, озброєння і боєзапасу, закріплених на одному або декількох транспортних блоках-модулях,...
Допоміжна наземна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями

Номер патенту: 96693
Опубліковано: 25.11.2011
Автори: Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Клименко Вадим Миколайович
МПК: F41H 7/00
Мітки: блоками-модулями, наземна, прихованого, розвідників, робототехнічна, транспортними, автономними, бойова, повністю, машина, супроводу, допоміжна
Формула / Реферат:
1. Наземна допоміжна бойова робототехнічна машина прихованого супроводу розвідників з повністю автономними транспортними блоками-модулями, що складається з набору шарнірно об'єднаних транспортних візків-траків у вигляді плоских платформ з кронштейнами, що несуть опорні колеса візків-траків, сполучених шарнірами, елементів електроживлення електрохімічного або накопичувального типу у вигляді суперконденсаторів, перетворювачів електроенергії,...
Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки
Номер патенту: 99033
Опубліковано: 10.07.2012
Автори: Борисюк Михайло Дем'янович, Клименко Вадим Миколайович, Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосійович, Беліков Віктор Тріфонович, Янчик Олександр Григорович, Лещенко Олег Іванович, Толстой Олексій Володимирович
МПК: F41H 7/02, B65D 85/68
Мітки: бронетанкового, техніки, супроводження, структурована, озброєння, робототехнічна, допоміжна, наземна, модульної, машина, бойова
Формула / Реферат:
1. Модульно структурована наземна допоміжна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої складається з енергетичного блока-модуля у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичних перетворювачів електроенергії, електромеханічних колісних, гусеничних або колісно-гусеничних рушіїв у вигляді автономних...
Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки
Номер патенту: 101993
Опубліковано: 27.05.2013
Автори: Янчик Олександр Григорович, Борисюк Михайло Дем'янович, Коваль Андрій Андрійович, Дяченко Олександр Феодосійович, Беліков Віктор Тріфонович, Лещенко Олег Іванович, Клименко Вадим Миколайович, Магерамов Лютфалій Курбан-Алієвич, Толстой Олексій Володимирович
МПК: F41H 7/00
Мітки: допоміжна, машина, типу, модульного, бронетанкового, бойова, техніки, супроводження, озброєння, наземна, робототехнічна
Формула / Реферат:
1. Наземна допоміжна бойова робототехнічна машина модульного типу для супроводження бронетанкового озброєння і техніки, основний виконавчий агрегат якої містить енергетичний функціональний блок-модуль у вигляді комплекту статичних джерел електричної енергії електрохімічного, конденсаторного або комбінованого типу, статичні перетворювачі електроенергії, електромеханічні колісні, гусеничні або колісно-гусеничні рушії у вигляді автономних...
Модульно-структурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників
Номер патенту: 95730
Опубліковано: 25.08.2011
Автори: Клименко Вадим Миколайович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Васильєв Валерій Валентинович, Поповіченко Олександр Вікторович
МПК: F41H 7/00
Мітки: допоміжна, робототехнічна, бойова, прихованого, супроводження, розвідників, наземна, модульно-структурована, машина
Формула / Реферат:
1. Модульно-структурована допоміжна наземна бойова робототехнічна машина скритного супроводження розвідників, що складається з одного або двох силових блоків-модулів, забезпечених електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами для живлення тягових електричних двигунів гусеничного рушія і решти споживачів електричної енергії, комплексом датчиків системи тягового електроприводу, зовнішньої...
Попередній патент: Затоплюваний асинхронний двигун
Наступний патент: Спосіб інтенсифікації розвитку рослин винограду
Випадковий патент: Матеріал для упакування