Суміщена шпиндельна опора
Номер патенту: 15383
Опубліковано: 30.06.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович



Формула / Реферат
1. Совмещенная шпиндельная опора, содержащая корпус, в котором размещен вал, установленный на опоре качения и радиальной аэростатической опоре, выполненной параллельно с опорой качения, отличающаяся тем, что опора снабжена дополнительной опорой качения, установленной параллельно имеющейся, а по обеим сторонам радиальной аэростатической опоры, расположены не менее двух однорядных радиальных аэростатических опор с принудительно регулируемой подъемной силой, оснащенных регуляторами давления газа, причем регуляторы давления газа каждой однорядной радиальной аэростатической опоры с принудительно регулируемой подъемной силой объединены в четыре группы регуляторов давления, каждая из которых содержит регуляторов давления, а по осям прямоугольных систем координат, начало отсчета которых лежит на оси симметриивнутренней поверхности корпуса совмещенной шпиндельной опоры, в корпусе опоры установлены датчики величины зазоров между основаниями этих датчиков величин зазоров и поверхностью вала совмещенной шпиндельной опоры, причем, однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой и установленные в совмещенной шпиндельной опоре по осям прямоугольных систем координат, начало отсчета которых лежит на оси симметрии внутренней поверхности корпуса опоры, упомянутые датчики величин зазоров образуют компенсаторы радиальных нагрузок на вал совмещенной шпиндельной опоры, совмещенная шпиндельная опора включает также блок выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, блок управления положением оси вращения вала совмещенной шпиндельной опоры, цифровой блок и измеритель угла поворота вала, причем датчики величин зазоров соединены с входами блока выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры соединены с входами цифрового блока и с входами блока управления положением оси вращения вала совмещенной шпиндельной опоры, выходы цифрового блока соединены с входами блока выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока управления положением оси вращения вала совмещенной шпиндельной опоры соединены с группами регуляторов давления, а выходы измерителя угла поворота соединены с входами цифрового блока.
2. Совмещенная шпиндельная опора по п.1, отличающаяся тем, что однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой снабжены быстродействующими регуляторами давления, электрически связанными с блоком управления положением оси вращения вала совмещенной шпиндельной опоры, включающими расположенные в камерах наддува жиклеров подачи газа коромысла, установленные на стойках с возможностью поворота вокруг оси вращения коромысла, регулировочные иглы, установленные на коромыслах напротив проводящих каналов жиклеров подачи газа, пружины коромысел, надетые на регулировочные иглы и упирающиеся одними концами в коромысла, а другими в основания жиклеров подачи газа, пьезоэлектрические двигатели с укрепленными на них толкателями, причем точка упора толкателя в коромысло расположена между осью вращения коромысла и регулировочной иглой.
Текст
Изобретение относится к станкостроению и может быть использовано при конструировании суперпрецизионных шли фовальных станков. Известна совмещенная шпиндельная опора [1], содержащая корпус, в котором размещен вал, установленный на опоре качения и выполненной параллельно с опорой качения радиальной аэростатической опоре. Такие шпиндельные опоры имеют большое практическое значение, поскольку сочетание положительных свойств газовых (аэростатических) подшипников и опор качения существенно повышает надежность и быстроходность опоры. Как известно, жесткость газовых подшипников гораздо выше жесткости подшипников качения (там же, с.11). "Это объясняется огромной разницей в площадях, передающих нагрузку от вала к корпусу опоры". Причем шарикоподшипник подбирают и монтируют таким образом, чтобы радиальная аэростатическая опора имела гарантированный зазор. Следовательно, если нагрузка не превышает расчетную, опора качения разгружена, а несущей является радиальная аэростатическая опора (там же, с.14). Однако, и при большой жесткости радиальной аэростатической опоры вал смещается при воздействии на него сколь угодно малой внешней нагрузки. Радиальное смещение вала опоры происходит в связи с теми физическими процессами, 'которые протекают в радиальной аэростатической опоре при воздействии на ее вал радиальной нагрузки. При концентрическом положении вала и втулки сопротивление течению газа в зазоре везде одинаково и давления газа в любой точке кольцевого сечения зазора равны (см. там же, с.89, 90). Под воздействием внешней нагрузки вал начинает смещаться и сечение кольцевого зазора становится переменным где - начальная высота зазора), что сопровождается изменением давления на ограничителях расхода (жиклерах). В зоне минимального зазора давление повышается, в зоне максимального зазора - уменьшается. Главный вектор сил давления растет, уравновешивая радиальную нагрузку. В момент равенства главного вектора сил давления в газовом слое и радиальной нагрузки смещение вала прекращается. Вал занимает равновесное положение. При изменении внешней (радиальной) нагрузки вал занимает новое равновесное положение, т.е. смещается. В основу изобретения поставлена задача такого усовершенствования конструкции совмещенной шпиндельной опоры, при котором за счет введения дополнительных конструктивных элементов и изменения связей между элементами конструкции в целом обеспечивается исключение радиального смещения вала опоры вследствие создания в ней дополнительной компенсирующей радиальной нагрузки и, как следствие, достижение погрешности положения оси вращения вала совмещенной шпиндельной опоры не более 0,03мкм. Решение этой задачи достигается тем, что в совмещенной шпиндельной опоре, содержащей корпус, в котором размещен вал, установленный на опоре качения и радиальной аэростатической опоре, выполненной параллельно с опорой качения, согласно изобретению, опора снабжена дополнительной опорой качения, установленной параллельно имеющейся, а по обеим сторонам радиальной аэростатической опоры, расположены не менее двух однорядных радиальных аэростатических опор с принудительно регулируемой подъемной силой, оснащенных регуляторами давления газа, причем регулятор давления газа каждой однорядной радиальной аэростатической опоры с принудительно регулируемой подъемной силой объединены в четыре группы регуляторов давления, каждая из которых содержит k ³ 1 регуляторов давления, а по осям n ³ 2 прямоугольных систем координат, начало отсчета которых лежит на оси симметрии внутренней поверхности корпуса совмещенной шпиндельной опоры, в корпусе опоры установлены датчики величины зазоров между основаниями этих датчиков величин зазоров и поверхностью вала совмещенной шпиндельной опоры, причем, однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой и установленные в совмещенной шпиндельной опоре по осям прямоугольных систем координат, начало отсчета которых лежит на оси симметрии внутренней поверхности корпуса опоры, упомянутые датчики величин зазоров образуют компенсаторы радиальных нагрузок на вал совмещенной шпиндельной опоры, совмещенная шпиндельная опора включает также блок выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, блок управления положения оси вращения вала совмещенной шпиндельной опоры, цифровой блок и измеритель угла поворота вала, причем, датчики величин зазоров соединены с входами блока выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока выбора несмещенного положения оси вращения совмещенной шпиндельной опоры соединены с входами цифрового блока и с входами блока управления положением оси вращения вала совмещенной шпиндельной опоры, выходы цифрового блока соединены с входами блока выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока управления положением оси вращения вала совмещенной шпиндельной опоры соединены с группами регуляторов давления, а выходы измерителя угла поворота соединены с входами цифрового блока. Решение задачи достигается также тем, что однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой снабжены быстродействующими регуляторами давления, электрически связанными с блоками управления положением оси вращения вала совмещенной шпиндельной опоры, включающими расположенные в камерах наддува жиклеров подачи газа коромысла, установленные на стойках с возможностью поворота вокруг оси вращения коромысла, регулировочные иглы, установленные на коромыслах напротив подводящих каналов жиклеров подачи газа, пружины коромысел, надетые на регулировочные иглы и упирающиеся одними концами в коромысла, а другими в основания жиклеров подачи газа, пьезоэлектрические двигатели с укрепленными на них толкателями, причем точка упора толкателя в коромысло расположена между осью вращения коромысла и регулировочной иглой. Причинно-следственная связь между заявляемым техническим решением и достигаемым результатом состоит в следующем. Одной из причин возникновения погрешностей размеров и формы поверхностей, получаемых шлифованием, является радиальное смещение под воздействием радиальной составляющей силы шлифования оси вращения вала шпиндельного узла станка и даже его изгиб под действием динамической нагрузки. Радиальное смещение оси вращения вала шпиндельного узла шлифовального станка и его изгиб вызывают следующие факторы: 1. Зазоры и некруглость радиальных опор вала. 2. Упругая деформация (изгиб) вала шпиндельного узла шлифовального станка под воздействием главного момента центробежных сил относительно центра масс вала и моментов радиальной составляющей силы шлифования относительно радиальных опор. 3. Упругие деформации радиальных опор вала под воздействием главного вектора центробежных сил (дисбаланса) вала и радиальной составляющей силы шлифования. Для предотвращения радиального смещения оси вращения вала и изгиба вала шпиндельного узла суперпрецизионного шлифовального станка в конструкцию шпиндельного узла станка дополнительно вводятся два компенсатора радиальной нагрузки на вал шпиндельного узла (фиг.1). Каждый компенсатор радиальной нагрузки включает установленные по осям систем координат и повернутых относительно друг друга на угол 45° датчики величин зазоров между валом шпиндельного узла и основаниями этих датчиков. В данном примере используется по восемь (фиг.2) емкостных датчиков величин зазоров в каждом компенсаторе радиальной нагрузки, установленных в сечениях по A - A и B - B. Да тчики каждого компенсатора радиальной нагрузки нагружены на устройства управления положением оси вращения вала 2, которые по измеренным величинам зазоров под датчиками величин зазоров обеспечивают определение координат центров двух сечений вала шпиндельного узла в системах координат и (центров сечения по A - A и B - B этого вала) и в процессе шлифования предотвращают смещение этих центров сечений из заданных положений. В состав каждого компенсатора радиальной нагрузки входят также размещенные равномерно по окружности регуляторы давления в газовом слое компенсаторов радиальной нагрузки (фиг.1, 3). В данном примере каждый компенсатор включает двенадцать регуляторов давления. Все регулятора давления объединены в четыре группы по три параллельно подключенных регулятора давления в каждой группе: Причем, регуляторы давления каждой группы расположены симметрично относительно осей систем координат. Каждый регулятор давления представляет собой камеру наддува, которая посредством отверстия соединена с зазором компенсатора радиальной нагрузки. Кроме того, в камере наддува установлен пьезоэлектрический двигатель с укрепленной на торце регулирующей иглой. В отличие от жиклеров радиальной аэростатической опоры, в которых подводящий канал жиклера, соединяющий зазоры с камерой наддува, является ограничителем расхода, создающим перепад давления, подводящий канал жиклера компенсатора не создает перепад давления между камерой наддува и зазором компенсатора радиальной нагрузки, то есть отношение где - давление на выходе подводящего канала жиклера компенсатора; - давление в камере наддува. При подаче сигнала управления на пьезоэлектрические двигатели регуляторов давления, например, расположенные по полуосям отверстия в зависимости от полярности сигнала приоткрываются или призакрываются. Результирующий вектор давления на вал, создаваемый регуляторами давления двух гр упп расположенных по регуляторов давления, оси направлен по направлению полуоси или и предотвращает смещение оси вращения вала шпиндельного узла в направлении оси. В общем случае, компенсаторы радиальной нагрузки на вал шпиндельного узла входящие в состав устройства стабилизации положения оси вращения вала шпиндельной опоры должны обеспечить создание результирующего вектора давления на вал опоры, предотвращающего радиальное смещение оси вращения вала из заданного положения под воздействием внутренних и внешних возмущений. Группы регуляторов давления, входящие в состав компенсаторов радиальной нагрузки, представляют собой однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой. Следовательно, рассматриваемая шпиндельная опора "представляет собой комбинацию в одном узле газового подшипника с подшипником качения" и является совмещенной опорой с раздельной установкой газовых подшипников и подшипников качения (Пинегин С.В. и др. Прецизионные опоры качения и опоры с газовой смазкой: Справочник. М.: Машиностроение, 1984. - С.8, 14). Во время работы совмещенной шпиндельной опоры, оснащенной компенсаторами радиальной нагрузки, подавляющая часть нагрузки должна приходится на однорядные аэростатические опоры. Почти полностью разгруженные подшипники качения работают в легком режиме, что увеличивает их долговечность. За счет того, что при мгновенных чрезмерных нагрузках основная часть нагрузки в совмещенной опоре приходится на подшипники качения, предотвращается металлический контакт в газовом подшипнике. "Вследствие кратковременности действия экстремальных нагрузок такое перераспределение сил не должно вызвать существенного накопления повреждений во вращающемся шарикоподшипнике"(см. там же, с.14). Кроме того, если радиальная нагрузка на такую совмещенную шпиндельную опору не превышает подъемной силы компенсаторов радиальных нагрузок (подъемных сил однорядных аэростатических опор с принудительно регулируемой подъемной силой), совмещенная шпиндельная опора является абсолютно жесткой, то есть работает без смещения оси вращения вала. Для достижения названных выше свойств совмещенной шпиндельной опоры в статике, на дискретных угла х поворота вала совмещенной шпиндельной опоры координаты центров определяют сечений плоскостями установки датчиков величин зазоров компенсаторов радиальных нагрузок (сечения вала по A - A и B - B, фиг.2). По полученному множеству координат центров сечений вала плоскостями установки датчиков величин зазоров определяют координаты центров этих сечений вала опоры, при которых, если ось вращения вала совмещенной шпиндельной опоры проходит через центры упомянутых сечений, вал совмещенной шпиндельной опоры будет вращаться без нагружения опор качения. Координаты центров сечений вала совмещенной шпиндельной опоры, при которых этот вал, если ось вращения проходит через центры сечений вала, вращается без нагружения опор качения, принимают в качестве координат несмещенной оси вращения вала совмещенной шпиндельной опоры. Балансируют вал этой шпиндельной опоры относительно его несмещенной оси вращения так, чтобы при отсутствии внешних радиальных нагрузок его вращение происходило вокруг несмещенной оси вращения без нагружения опор качения. При этом вал опоры должен быть уравновешен не только статически, но и динамически, что исключает возникновение динамической нагрузки на опоры при изменении скорости вращения вала. В процессе обработки шлифованием непрерывно измеряют положение оси вращения вала шпиндельной опоры. При воздействии на вал опоры радиальной нагрузки из заданного диапазона ее изменения компенсаторами радиального смещения оси вращения вала создают избыточное давление на вал опоры, равное по величине и противоположное по направлению радиальной нагрузке, и обеспечивать стабилизацию положения оси вращения вала опоры с высокой точностью. Для этого по измерениям величин зазоров между поверхностью вала совмещенной шпиндельной опоры и основаниями датчиков величин зазоров, установленных в корпусе опоры по осям прямоугольных систем координат, лежащих в сечениях шпиндельной опоры по A - A При совмещенных центрах сечений вала с началом система координат их координаты равны нулю. Пусть под воздействием радиальной нагрузки вал шпиндельной опоры сместился. Следовательно, центры сечения вала сместятся относительно начала систем координат (фиг.4). Тогда, по измерениям величин зазоров под двумя из восьми датчиков величин зазоров, установленных на разноименных осях каждой из систем координат, например, по измерениям зазоров под датчиками установленных в сечении вала опоры по A - A, можно определить координаты смещенного центра сечения вала опоры (в системе координат системы уравнений: где из следующей - координаты датчиков в системе координат - расстояние от оснований датчиков по A - A; до смещенного центра сечения вала - координаты смещенного центра и B - B (фиг.1, 2) в данном примере реализации центры сечений вала совмещенной шпиндельной опоры плоскостями установки датчиков величин зазоров компенсаторов радиальной нагрузки (сечения опоры по A - A и B - B) совмещают с началами систем координат сечения вала по A - A в системе координат где - полярный радиус приближающего сечения вала эллипса на угле установки датчика соответственно. Сечения вала задают ближайшими к этим сечениям эллипсами, определяют параметры приближающих сечения вала эллипсов и рассчитывают координаты датчиков величин зазоров (фиг.2) каждого компенсатора радиальной нагрузки, установленных по осям систем координат, лежащих в сечениях по A - A и B - B совмещенной шпиндельной опоры: датчиками По этой же методике определяют координаты где -полярный радиус приближающего вала эллипса на угле установки датчика - величина зазоров под смещенного центра сечения вала по B - B в системе координат При установке датчиков величин зазоров по осям двух систем координат на каждом угле поворота вала может быть рассчитано пары координат смещенных центров сечений вала шпиндельной опоры. Следовательно, информации о положении центров сечений вала совмещенной шпиндельной опоры извлекается с избытком, что позволяет для оценки положения центра сечений вала применить метод наименьших квадратов. Согласно методу наименьших квадратов, наиболее вероятными значениями координат центра сечения вала будут те, для которых сумма квадратов отклонений от рассчитанных координат центра сечения вала будет наименьшей: координат в сечении вала опоры по A - A, и вычисляют координат центра сечения вала опоры на угле поворота вала и малой нагрузке на вал в направлении оси в соответствии с (3), а также вычисляют оценки координат центра сечения вала по A - A на угле поворота Последовательно шпиндельной опоры вал совмещенной устанавливают на углы поворота где - пары координат центров сечений вала по A - A и B - B, соответственно, совмещенной шпиндельной опоры на данном угле поворота вала. Продифференцировав суммы квадратов отклонений по и приравняв их к нулю получают оценки (точное значение) координат центров сечений вала совмещенной шпиндельной опоры на данном угле его поворота: На каждом дискретном угле поворота вала) нагружая вал малой нагрузкой в направлении оси подвижной системы координат (по A - A). получают оценки координат центра сечения вала В результате на дискретных углах поворота вала получают оценку координат центра сечения вала (по A - A): В качестве несмещенных координат оси вращения вала смещенной шпиндельной опоры, проходящей через центр сечения вала по A - A, при которых вращение вала вокруг этой оси будет происходить без нагружения опор качения, принимают координаты центра сечения вала по A - A, для которых сумма квадратов отклонений от координат оси вращения вала, рассчитанных на дискретных углах поворота при малых нагружениях вала, минимальна: Большая избыточность информации о положении центров сечений вала, применение высокоточных измерителей величин зазоров позволяют координаты центров сечений вала с погрешностью, не превышают 0,01мкм. Для определения (в статике) координат оси вращения вала шпиндельной опоры, проходящей через центры сечений вала, вращение вала вокруг которой происходит без нагружения опор качения, вал опоры устанавливают на угол поворота Пусть в плоскости торца вала помещены подвижная система координат начало которой совпадает с центром торца вала (фиг.5). На угле поворота вала нагружают вал малой нагрузкой в положительном направлении оси которая не вызывает упругой де формации вала опоры, но обеспечивает выбор зазора в передней опоре качения совмещенной шпиндельной опоре в направлении силы Не снимая нагрузки, измеряют величины зазоров зазоров, под датчиками величин установленных по осям систем Продифференцировав (6) по получают искомые координаты оси вращения вала (центра сечения вала совмещенной шпиндельной опоры по A - A): По приведенной выше методике определяют также несмещенные координаты оси вращения вала совмещенной шпиндельной опоры, проходящей через центр сечения вала по B - B, при которых вращение вала вокруг этой оси происходит без нагружения опор качения: Задают вала вращение вокруг оси, проходящей через центры вала, координаты которых в системах координат _ и имеют значения соответственно и выполняют балансировку вала совмещенной шпиндельной опоры. Причем, балансировку вала шпиндельной опоры выполняют в режиме холостого хода, то есть при отсутствии радиальной нагрузки. Для того, чтобы валу опоры задать вращение вокруг оси вращения вала с координатами вал шпиндельного устанавливают узла на совмещенного последовательно углы поворота На каждом угле поворота вала на четыре группы регуляторов давления каждого из двух компенсаторов радиальной нагрузки подают сигналы управления В момент поворота вала опоры, например, на угол измеряют величины зазоров под датчиками величин зазоров компенсаторов радиальной нагрузки и рассчитывают (как и ранее) координаты центров сечений вала смещенных из заданного положения под воздействием динамической нагрузки. Вычисляют величину вектора динамической нагрузки в сечении вала по A - A (в системе координат и в сечении вала по B - B) в системе координат (фиг.6) соответственно, и, измеряя координаты центров сечений вала методом последовательных приближений добиваются выполнения равенств, что эквивалентно смещению оси вращения вала в выбранное несмещенное положение: В результате выполнения этих действий получают привязанное к дискретным углам поворота вала множество групп сигналов управления на группы регуляторов давления первого компенсатора радиальной нагрузки и углы нагрузки наклона вектора динамической к осям соответственно (на угле поворота вала Тогда проекция вектора динамической нагрузки на оси системы координат угле поворота вала опоры и множество групп сигналов управления на группы регуляторов давления второго компенсатора радиальной нагрузки подача которых на соответствующие гр уппы регуляторов давления компенсаторов радиальных нагрузок при повороте вала на угол привязки данной группы сигналов управления обеспечивает в статике смещение оси вращения вала, проходящей через центры его сечений по A - A и B - B в несмещенное положение, заданное ее координатами из (6). В том случае, если вал совмещенной шпиндельной опоры статически и динамически уравновешен относительно оси вращения, проходящей через центры сечений вала с координатами вращение вала опоры при подаче на регуляторы давления сигналов управления из (12) и (13) и отсутствии внешней радиальной нагрузки также будет происходить вокруг несмещенной оси вращения с указанными координатами. Для балансировки валу опоры задают вращение с постоянной скоростью На дискретных угла х поворота на группы регуляторов давления обоих компенсаторов радиальной нагрузки подают привязанные к этим углам поворота группы сигналов управления и из (12) и (13). на равны: а на оси системы координат равны: Балансируют вал известными методами и добиваются того, чтобы ось вращения вала, проходя через центры его сечений по A - A и B - B, заняла несмещенное положение. В силу того, что балансировку вала выполняют по измерениям величин смещений центров двух сечений вала под воздействием динамической нагрузки с погрешностью, не превышающей 0,01мкм, вал сохранит сбалансированность при вращении с любой другой угловой скоростью (Современные методы и средства балансировки машин и приборов / Под ред. Щепетильникова В.А. - М.: Ма шиностроение, 1985. - С.23). В результате выполненной балансировки вал опоры при отсутствии внешней радиальной нагрузки и при воздействии на него тех же сил давления групп регуляторов давления компенсаторов, которые в статике на дискретных угла х поворота предотвращают смещение оси вращения этого вала относительно положения, будет вращаться вокруг несмещенной оси вращения, проходящей через центры сечений вала с координатами Пусть совмещенная шпиндельная опора используется в качестве элемента формообразующей системы шлифовального станка. Пусть также радиальная составляющая силы шлифования, направленная по направлению полуоси шлифовальному кругу (фиг.1, 7). и приложена к Под воздействием момента силы шлифования относительно центра тяжести вала (фиг.7) ось вращения вала опоры будет поворачиваться в направлении действия силы вокруг центра тяжести до тех пор, пока момент силы шли фования не будет уравновешен моментом сил, возникающим в смазочном газовом столе радиальной аэростатической опоры. Следовательно, величина зазора под датчиком в сечении опоры по A - A увеличится а величина зазора под датчиком в сечении опоры B - B уменьшится, В результате шлифование будет выполняться с перекосом оси вращения вала. Причем, величина перекоса оси вращения вала определяется величиной радиальной составляющей силы шлифования и является величиной переменной. Для предотвращения смещения оси вращения вала совмещенной шпиндельной опоры под воздействием радиальной составляющей силы шлифования необходимо выполнить следующее. Измерим величины зазоров под датчиками установленных в сечениях опоры по A - A и B - B и соотве тствующи х несмещенному положению оси вращения вала. Заменим радиальную составляющую силы шлифования парой сил (фиг.7), приложенных к валу в плоскостях установки групп регуляторов давления компенсаторов радиальной нагрузки и создающих момент пары сил относительно центра тяжести вала, равный моменту На основании третьего закона Ньютона вал будет воздействовать на газовый слой групп регуляторов давления с силами и (в плоскости установки регуляторов давления), равных по модулю и противоположных по направлению силам Следовательно, если при увеличении зазора под датчиком установленному в сечении по A - A опоры, на полуоси с системы координат помощью группы регуляторов опоры. Однако, из-за некруглости вала (фиг.8) величина зазора под датчиками будут изменяться и тогда, когда вал опоры вращается без смещения оси вращения, то есть радиальная нагрузка отсутствует, а группы регуляторов давления удерживают ось вращения вала опоры в несмещенном положении. Устройство управления положением оси вращения вала совмещенной шпиндельной опоры в процессе шлифования должно удерживать ось вращения вала в несмещенном положении и, если величины зазоров под датчиками изменяются только из-за некруглости вала (без смещения оси вращения), не должно изменять положения оси вращения вала. Исключить влияние некруглости вала на работу устройства можно следующим образом. Одному повороту вала опоры (фиг.9), вращающегося вокруг несмещенной оси вращения, соответствует два периода переменной составляющей напряжений и зазоров на выходах измерителей величин над датчиками установленных по полуосям системы координат и два периода переменной составляющей напряжений и на выходах измерителей величин зазоров под датчиками установленных по полуосям системы координат Причем, амплитуды переменных составляющих определяются только величиной некруглости вала, а положение оси вращения вала опоры по осям систем координат в каждом его сечении определяется средними значениями напряжений (фиг.9) на выходах измерителей величин зазоров. Для выделения средних значений напряжений на выходах измерителей величин зазоров при вращении вала вокруг несмещенной оси вращения напряжения подают на входы интеграторов. Как известно (Чесноков А.А. Решающие усилители. - Л.: Энергия, 1969. - С.45) напряжение на выходе интегратора изменяется по закону: давления, установленных по полуоси в сечении по Б-Б опоры, создать дополнительно силу давления на вал, равную по величине и направлению силе а с помощью группы регуляторов давления, установленных в сечении по Г - Г опоры на полуоси дополнительную силу давления создать на вал, равную по величине и направлению силе пара сил создают компенсирующий момент Следовательно, момент будет компенсирован моментом и шлифование будет выполняться без смещения (перекоса) оси вращения вала совмещенной шпиндельной где - коэффициент усиления интегратора в разомкнутом состоянии. Пусть скорость вращения вала опоры равна Тогда его период вращения а время за которое переменная составляющая на выходе измерителя изменяется от среднего значения выходного напряжения до максимального значения на Пусть амплитуда переменной составляющей выходе измерителя величины зазора, например а допустимое отклонение его выходного напряжения из-за некруглости вала (при вращении вокруг несмещенной оси вращения) от среднего значения выходного напряжения, равно Тогда для расчета постоянной времени интегратора можно воспользоваться выражением: На фиг.9 показаны выходные напряжения измерителей величин зазоров под датчиками установленных по осям системы координат при вращении вала вокруг несмещенной оси вращения и нулевом значении радиальной составляющей силы шлифования. При подаче в момент времени эти х напряжений на входы интеграторов с рассчитанным значением постоянной времени напряжения на их выходах достигн ут значений и не изменяются из-за некруглости вала. Выделяют постоянные составляющие напряжений на выходах измерителей при вращении вала вокруг несмещенной оси вращения и запоминают их. Выделяют также переменные составляющие измерителей (без сдвига по фазе) и, промодулировав ими постоянные составляющие (20), получают опорные напряжения для радиальной стабилизации положения оси вращения вала совмещенной шпиндельной опоры по осям систем координат соответственно (фиг.10): В процессе шлифования стабилизацию положения оси вращения вала опоры осуществляют путем формирования координатных сигналов управления на группы регуляторов давления, установленных по осям системы координат пропорциональных разностям между опорными напряжениями выходными и напряжениями измерителей величин зазоров под датчиками установленных в сечениях по A - A и B - B, соответственно. При этом величина разностного сигнала по данной координате не зависит от величины некруглости вала и определяется только величиной смещения оси вращения вала из несмещенного положения (величиной отклонения выходного сигнала измерителя величины зазора от соответствующего опорного напряжения). Если разностный сигнал по данной координате не равен нулю, что свидетельствуе т о смещении оси вращения вала опоры под воздействием радиальной составляющей силы шли фования или несбалаисированности шлифовального инструмента, группы регуляторов давления создают компенсирующий момент и предотвращают смещение оси вращения вала совмещенной шпиндельной опоры из выбранного несмещенного положения. На фиг.1 показана совмещенная шпиндельная опора с компенсаторами радиальной нагрузки; на фиг.2 - размещение датчиков величин зазоров в сечениях совмещенной шпиндельной опоры по A A и B - B; на фиг.3 - размещение групп регуляторов давления в сечениях совмещенной шпиндельной опоры по Б - Б и Г - Г; на фиг.4 иллюстрация принципа измерения координат центра сечения вала плоскостью установки датчиков величин зазоров; на фиг.5 - нагружение вала совмещенной шпиндельной опоры малой нагрузкой на фиг.6 - измерение вектора дисбаланса в сечении совмещенной шпиндельной опоры; на фиг.7 - принцип создания момента компенсации радиальной нагрузки; на фиг.8 погрешности изготовления вала и внутренней поверхности втулки совмещенной шпиндельной опоры; на фиг.9 - эпюры выходных напряжений измерителя величины зазора и интегратора выходного напряжения измерителя величины зазора; на фиг.10 - принцип формирования сигнала погрешности положения оси вращения вала совмещенной шпиндельной опоры; на фиг.11 - совмещенная шпиндельная опора (укрупненная электрическая блок-схема); на фиг.12 совмещенная шпиндельная опора (схема функциональная, электрическая); на фиг.13 - блок выделения огибающей выходного напряжения измерителя величины зазора (схема функциональная, электрическая); на фиг.14 иллюстрация методики совмещения полуосей эллипса в сечении вала с полуосями систем координат на фиг.15 совмещенная шпиндельная опора с быстродействующими регуляторами давления. Совмещенная шпиндельная опора включает радиальную аэростатическую опору 1, с двумя линиями наддува, вал 2, блок 3 выбора несмещенного положения вала 2 совмещенной шпиндельной опоры, блок 4 управления положением оси вращения вала 2 совмещенной шпиндельной опоры, цифровой блок 5 и измеритель 6 угла поворота вала 2 (фиг.1, 11). Кроме того, в корпусе 7 совмещенной шпиндельной опоры в двух сечениях этой опоры (по A - A и B - B фиг.1) установлены датчики 8 величин зазоров 9 между основаниями датчиков 8 и поверхностью вала 2. В каждом из упомянутых сечений опоры по осям систем координат (фиг.2, 12) в данном примере реализации устройства устанавливают по восемь датчиков 8 величин зазоров. В корпусе 7 совмещенной шпиндельной опоры равномерно по окружности выполнены жиклеры 10 подачи газа в зазор 9, соединяющие камеры наддува 11с зазором 9 (фиг.1). Напротив жиклеров 10 подачи газа в зазор 9 в камерах наддува 11 установлены пьезоэлектрические двигатели 12 с установленными на них регулировочными иглами 13, предназначенные для изменения площадей поперечного сечения жиклеров 10 подачи газа. Жиклер 10 подачи газа и пьезоэлектрический двигатель 12 с регулировочной иглой 13 образуют регулятор 14 давления газа в зазоре 9. Регуляторы 14 давления газа установлены в сечениях опоры по Б - Б и Г - Г. Причем, в каждом из упомянутых сечений опоры они объединены в четыре группы: первая группа 15 регуляторов давления, вторая группа 16 регуляторов давления, третья группа 17 регуляторов давления, четвертая группа 18 регуляторов давления в сечении по Б - Б опоры (фиг.3, 12) и пятая группа 19 регуляторов давления, шестая группа 20 регуляторов давления, седьмая группа 21 регуляторов давления, восьмая группа 22 регуляторов давления в сечении по Г - Г опоры (фиг.3, 12). Группы 15, 16, 17, 18 регуляторов давления и группы 19, 20, 21, 22 давления образуют однорядные радиальные аэростатические опоры с принудительно регулируемой подъемной силой. Причем, регуляторы 14 каждой группы регуляторов давления в каждом сечении устанавливают симметрично осей базовых систем координат (фиг.3, 12), а оси систем предназначены для преобразования сигналов датчиков 8 величин зазоров в напряжения, пропорциональные величинам зазоров под этими датчиками 8. В качестве измерителей 32 величин зазоров могут использоваться измерители микроперемещений (Гриневич Б. Ф. Измерительные компенсационно-мостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987.). Причем, погрешность таких измерителей составляет (10-3 - 10-4) величины измеряемого зазора. В настоящее время существуют измерители микроперемещений, погрешность измерения которых не превышает (10-6 - 10-7) величины измеряемого зазора. Сигналы с выходов измерителей 32 величин зазоров поступают в цифровой блок 5. Причем, сигналы с выходов измерителей 32 величин зазоров, соединенных с датчиками 8 величин зазоров, установленных по полуосям координат в сечениях опоры по A-A, B - B, Б - Б и Г - Г параллельны между собой. Измерение координат оси вращения вала 2 и формирование вектора компенсации радиальных нагрузок в упомянутых сечениях опоры осуществляют в базовых системах координат. Группы 15, 16, 17, 18 регуляторов 14 давления, установленные в сечении по Б - Б и датчики 8 величин зазоров, установленные в сечении по A - A опоры (фиг.1), образуют компенсатор 23 радиальных нагрузок. Группы 19, 20, 21, 22 регуляторов 14 давления, установленные в сечении по Г - Г и датчики 8 величин зазоров, установленные в сечении по B - B опоры 1 (фиг.1), образуют компенсатор 24 радиальных нагрузок. 25 установленные в двух сечениях вала 2 (фиг.1) балансировочные винты (подвижные корректирующие массы). В каждом сечении вала 2 по осям плоских прямоугольных систем координат устанавливают по четыре регулировочных винта. 25 - подшипники качения, установленные во фланцах 27 (фиг.1). Фланцы 27 прикреплены к торцам корпуса 7 совмещенной шпиндельной опоры и служат для установки зазоров 9 компенсаторов радиальной нагрузки. 28 - шлифовальный инструмент. 29 - диск с метками угла поворота вала 2. 30 - окна выпуска газа регуляторов 14 давления. 31 - источники наддува (источник газа высокого давления). Блок 3 выбора несмещенного положения оси вращения вала 2 совмещенной шпиндельной опоры предназначен для: - измерения координат оси вращения вала 2 опоры; - определения в двух сечениях опоры координат оси вращения вала 2 этой опоры (несмещенного положения оси вращения вала 2), при которых, если вращение вала 2 опоры осуществляется вокруг оси вращения с этими координатами, вал 2 опоры не нагружает опоры качения; задания валу 2 вращения вокруг несмещенной оси вращения и сверхточной балансировки вала 2 относительно несмещенной оси вращения и включает следующие элементы. Измерители 32 величин зазоров (фиг.12) по сигналам датчиков 8 величин зазоров обоих компенсаторов 23 и 24 радиальных нагрузок. Измерители 32 величин зазоров координат систем лежащих в сечениях по A - A и B - B опоры фиг.12), поступают в ци фровой блок 5 через переключатель 33 "несмещенное положение управление" в положении "несмещенное положение". В положении переключателя 33 "управление" сигналы с выходов этих измерителей поступают в блок 4 управления положением оси вращения вала 2 совмещенной шпиндельной опоры. Промежуточный регистр 34 кода сигнала управления промежуточный регистр 35 кода сигнала управления промежуточный регистр 36 кода управления промежуточный регистр 37 кода сигнала управления промежуточный регистр 38 кода управления сигнала промежуточный регистр 39 кода сигнала управления промежуточный регистр 40 кода управления сигнала сигнала промежуточный регистр 41 кода сигнала управления предназначены для приема из цифрового блока 5 и хранения кодов сигналов управления из (12) и (13) на группы 18, 16, 17, 15, 22, 20. 21, 19 регуляторов давления компенсаторов 23 и 24 радиальной нагрузки, соответственно, и обеспечивающих на угле угла поворота вала 2 установку его оси вращения в несмещенное положение. Схемы 42 клапанов служат для записи по сигналу поворота вала 2 на угол поворота из цифрового блока 5 кодов сигналов управления из промежуточных регистров 34, 35, 36, 37, 38, 39, 40, 41 кодов сигналов управления в регистр 43 сигнала управления в регистр 44 сигнала управления в регистр 45 сигнала в регистр управления 46 сигнала управления в регистр 47 сигнала управления в регистр 48 сигнала управления в регистр 49 кода сигнала управления в регистр 50 кода сигнала управления соответственно. Регистры 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления предназначены для хранения цифровых двоичных кодов и знаков сигналов управления в течении времени дискреты управления (в течении времени поворота вала 2 от угла до угла поворота этого вала 2). Цифро-аналоговые преобразователи 51 служат для преобразования кодов сигналов управления записанных в регистры 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления, в напряжения, соответствующие цифровым двоичным кодам этих сигналов управления. Ключи 52 положительных сигналов управления предназначены для пропуска сигналов управления поступающи х с выходов цифро-аналоговых преобразователей 51, если в знаковых разрядах кодов сигнала управления в соответствующи х регистрах 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления записаны единицы, то есть в эти регистры записаны коды положительных сигналов управления. Это означает, что в исходном состоянии каждый ключ 52 закрыт и открывается высоким потенциалом знакового разряда одного из регистров 43, 44, 45, 46, 47, 48, 49, 50 сигнала управления. Ключи 53 отрицательных сигналов управления предназначены для пропуска сигналов управления поступающих с вы ходов цифроаналоговых преобразователей 51, если в знаковых разрядах кодов сигналов управления в соответствующи х регистрах 43, 44, 45, 46, 47, 46, 49, 50 сигналов управления записаны нуди, то есть в эти регистры записаны коды, отрицательных сигналов управления. Это означает, что в исходном состоянии каждый ключ 53 открыт и не изменяет своего состояния при воздействии низкого потенциала знакового разряда. Ключи 53 закрываются высокими потенциалами знаковых разрядов регистров 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления. Операционные усилители 54, 55, 56, 57, 58, 59, 60, 61 сигналов управления соответственно, служат для формирования положительных напряжений сигналов управления, если в соответствующие регистры 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления записаны коды положительных сигналов управления (в знаковых разрядах записаны единицы), или отрицательных напряжений сигналов управления, если в упомянутые регистры записаны коды отрицательных сигналов управления (в знаковых разрядах записаны нули) путем подачи выходных сигналов аналогово-цифровых преобразователей 51 через схемы 52 на инвертирующие входы операционных усилителей 54, 55, 56, 57, 58, 59, 60, 61 сигналов управления (при положительных кодах сигналов управления) или через схемы 53 клапанов на инвертирующие входы упомянуты х операционных усилителей сигналов управления (при отрицательных кодах сигналов управления в регистрах 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления. Блок 4 управления положением оси вращения вала 2 совмещенной шпиндельной опоры предназначен для формирования опорных напряжений по осям систем координат соответственно, соответствующи х несмещенному положению оси вращения вала 2 совмещенной шпиндельной опоры. Выработки на основе упомянутых опорных напряжений координатных сигналов управления на группы 15, 16, 17, 18, 19, 20, 21, 22 регуляторов давления, пропорциональных разностям между опорными напряжениями и выходными напряжениями измерителей 32 величин зазоров по сигналам датчиков 8 величин зазоров, установленных по полуосям систем координат соответственно, и включает следующие элементы. Интегратор 62 выходного напряжения измерителя величины зазора, интегратор 63 выходного напряжения измерителя величины зазора, интегратор выходного напряжения величины зазора, интегратор 65 64 измерителя выходного напряжения измерителя величины зазора предназначены для выделения постоянных составляющих выходных напряжений измерителей 32 величин зазоров по сигналам датчиков 8 величин зазоров, установленных по полуосям систем координат в сечениях по A - A и B - B опоры, соответственно, соответствующи х несмещенному положению оси вращения вала 2 опоры. Аналого-цифровые преобразователи 66 предназначены для преобразования выходных напряжений интеграторов 62, 63, 64, 65 в цифровые двоичные коды. В качестве аналогоцифровых преобразователей 66 могут использоваться, например, аналого-цифровые преобразователи на базе микросхемы К572ПВ1 (Гутников В.С. Интегральная электроника в измерительных устройства х. - Л.: Энергоиздат, 1988. - С.239). Кнопка 67 "Старт" служит для запуска аналого-цифровых преобразователей 66. 68 - источник питания кнопки "Старт". Регистр 69 кода постоянной составляющей регистр 70 составляющей постоянной составляющей кода регистр постоянной 71 кода регистр 72 кода постоянной составляющей предназначены для приема с аналого-цифровых преобразователей 66 и хранения двоичных кодов постоянных составляющих соответствующи х измерителей 32 величин зазоров. Схемы 73 клапанов регистров постоянных составляющих обеспечивают запись по сигналам готовности аналогово-цифровых преобразователей 66 двоичных кодов постоянных составляющих в регистры 69, 70, 71, 72 кодов постоянных составляющих. Цифро-аналоговые преобразователи 74 кодов постоянных составляющих служат для преобразования двоичных кодов постоянных составляющих в соответствующие этим кодам напряжения этих постоянных составляющих. Блок 75 выделения огибающей выходного напряжения измерителя величины зазора, блок 76 выделения огибающей выходного опорного напряжения формирования предназначены опорных опорного (фиг.10) блок 86 напряжения для формирования напряжений соответствующих несмещенному положению оси вращения вала 2 опоры. В качестве блоков 83, 84, 85, 86 формирования опорного напряжения могут использоваться алгебраические сумматоры электрических аналоговых сигналов (Ялышев А.У. и др. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1984. - С.158). Выходные напряжения блоков 83, 84, 85, 86 формируются в соответствии с выражениями: напряжения измерителя величины зазора, блок 77 выделения огибающей выходного напряжения измерителя величины зазора, блок 78 выделения огибающей выходного напряжения предназначены измерителя величины зазора для выделения огибающих выходных напряжений измерителей 32 величин зазоров по сигналам датчиков 8 величин зазоров, установленных по полуосям Причем, амплитуды эти х огибающи х определяются только величиной некруглости вала 2 опоры. Каждый блок 75, 76, 77, 78 выделения огибающей выходного напряжения включает (фиг.13) дифференцирующий RC-контур 79 постоянного тока. Причем передаточная функция контура где - постоянная времени RC-контура, а выделенная огибающая опережает по фазе огибающую вы ходного напряжения измерителя на величину Для совмещения по фазе огибающих на выходах блоков 75, 76, 77, 78 с огибающими на выходах соотве тствующи х измерителей 32 величин зазоров дифференцирующий RC-контур 79 нагружают на дифференцирующий трансформатор 80 (фиг.13), обеспечивающий запаздывание огибающей по фазе на Для обеспечения режима холостого хода дифференцирующего трансформатора 80 его нагружают на катодный повторитель 81 (Зайцев Г.Ф. Основы теории систем автоматического регулирования и управления. - Т.2. - Изд-во КВИРТУ ПВО, 1963. - С.61 - 65). Усилитель 82 служит для выравнивания амплитуд огибающи х на выхода х блоков 75, 76, 77, 78 выделения огибающих и огибающи х выходных напряжений соответствующи х измерителей 32. Блок 83 формирования опорного напряжения блок напряжения 84 формирования блок 85 опорного формирования Дифференциальный усилитель 87 сигнала погрешности положения оси вращения вала на оси дифференциальный усилитель 88 сигнала погрешности положения оси вращения вала на оси дифференциальный усилитель 89 погрешности положения оси вращения вала по оси дифференциальный усилитель 90 погрешности положения оси вращения вала на оси служат для формирования сигналов управления на группы 16, 18 регуляторов давления компенсатора 23 радиальной нагрузки, на группы 15, 17 регуляторов давления компенсатора 23 радиальной нагрузки, на группы 20, 22 регуляторов давления компенсатора 24 радиальной нагрузки, на группы 19, 21 регуляторов давления компенсатора 24 радиальной нагрузки. Сигналы погрешности положения оси вращения вала 2 опоры, предотвращающие смещение оси вращения вала 2 из несмещенного положения, формируются в соответствии с выражениями: Переключатели 91 "работа - несмещенное положение" служат для подключения к дифференциальным усилителям 87, 88, 89, 90 в положении "работа", выходов блока 4 управления положением оси вращения вала совмещенной шпиндельной опоры или выходов блока 3 выбора несмещенного положения оси вращения вала 2 совмещенной шпиндельной опоры в положении "несмещенное положение". Переключатели 92 "вкл. - выкл." служат для отключения выходов дифференциальных усилителей 87, 88, 89, 90 от групп 15, 16, 17, 18, 19, 20, 21, 22 регуляторов давления при настройке устройства. Цифровой блок 5 представляет собой персональную ЭВМ, оснащенную модулем ввода вывода для обмена информацией с внешними функциональными элементами. Примером такой ЭВМ является персональная ЭВМ типа 9825 фирмы "Хьюллет - Паккард" с модулем ввода вывода (Науман Г. и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982. - С.272 - 290). Цифровой блок 5 обеспечивает: 1. Съем информации с измерителей 32 величин зазоров и вычисление координат оси вращения вала 2 совмещенной шпиндельной опоры. 2. Вычисление координат несмещенного положения оси вращения вала 2 совмещенной шпиндельной опоры. 3. Прием информации с измерителя 6 угла поворота вала 2 и отображение угла поворота вала 2 на экране дисплея. 4. Формирование массивов сигналов управления на группы 16 и 18, 15 и 17, 20 и 22, 19 и 21 регуляторов давления компенсаторов 23 и 24 радиальных нагрузок, обеспечивающих на дискретных углах поворота вала 2 опоры установку оси вращения вала 2 в несмещенное положение. Измеритель 6 угла поворота вала 2 представляет собой, например, тахометр электронно-счетный (АН УССР, паспорт МОИС 801.0.0.0.00 ПС, 1985г.), который обеспечивает формирование сигнала нулевого поворота вала 2, а также формирование одно, двух, четырех и далее кратных двум градусных меток угла поворота вала 2 совмещенной шпиндельной опоры. Причем, датчики 8 величин зазоров соединены с входами блока 3 выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока 3 выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры соединены с входами цифрового блока 5 и с входами блока 4 управления положением оси вращения вала совмещенной шпиндельной опоры, выходы цифрового блока 5 соединены с входами блока 3 выбора несмещенного положения оси вращения вала совмещенной шпиндельной опоры, выходы блока 4 управления положением оси вращения вала совмещенной шпиндельной опоры соединены с группами 15, 16, 17, 18, 19, 20, 21, 22 регуляторов давления, а выходы измерителя 6 угла поворота вала соединены с входами цифрового блока 5. Совмещенная шпиндельная опора работает следующим образом. 1. В сечениях вала 2 совмещенной шпиндельной опоры 1 плоскостями установки датчиков 8 величин зазоров компенсаторов 23 и 24 радиальных нагрузок в системах координат определяют координаты несмещенного положения оси вращения вала 2, проходящей через центры эллипсов в упомянутых сечениях вала 2, при вращении вокруг которой вал 2 не нагружает опоры качения. 1.1. Сечение вала 2 плоскостью установки датчиков 8 величин зазоров компенсатора 23 радиальных нагрузок (сечение вала 2 по A - A, фиг.1) задают ближайшим к этому сечению эллипсом и определяют его параметры. Для выполнения этих действий переключатель 91 "работа - несмещенное положение" устанавливают в положение "несмещенное положение" и подключают входы операционных усилителей 54, 55, 56, 57, 58, 59, 60, 61 сигналов управления блока 3 выбора несмещенного положения оси вращения вала 2 ко входам дифференциальных усилителей 87, 88, 89, 90 сигнала погрешности положения оси вращения вала 2. Переключатели 92 "вкл. выкл." устанавливают в положение "вкл." и подключают выходы дифференциальных усилителей 87, 88, 89, 90 сигнала погрешности положения оси вращения вала 2 к группам 15, 16, 17, 18 регуляторов давления компенсатора 23 радиальной нагрузки и к группам 19, 20, 21, 22 регуляторов давления компенсатора 24 нагрузки. С пульта цифрового блока 5 выполняют пуск программы "Отображение величин зазоров". В соответствии с алгоритмом работы этой программы цифровой блок 5 с заданной частотой опрашивает измерители 32 величин зазоров, преобразуют их вы ходные напряжения в цифровые двоичные коды, которые в десятичном коде отображаются на экране дисплея. Цифровой блок 5 считывает также двоичный код текущего угла поворота вала 2 со счетчика измерителя 6 угла поворота, который также преобразуется в десятичный код и отображается на экране дисплея. Сечение вала 2 опоры (по A - A, фиг.1) устанавливают симметрично оси системы координат Для этого на произвольном угле поворота вала 2.торы под датчиками 8 величин зазоров (фиг.14) компенсатора 23 радиальной нагрузки, установленных по полуосям системы координат устанавливают равные величины зазоров. Если для этого вал 2 необходимо смещать в направлении полуоси на пульте цифрового блока 5 набирают коды сигналов управления на группы 15 и 17 регуляторов давления компенсатора 23 радиальной нагрузки и выполняют пуск программы "Смещение вала". В соответствии с алгоритмом работы этой программы сигналы управления из цифрового блока 5 поступают в промежуточные регистры 36 и 37 кодов сигналов управления соответственно. С задержкой во времени относительно записи упомянутых сигналов управления в промежуточные регистры 36 и 37 кодов сигналов управления из цифрового блока 5 на схемы 42 клапанов поступает сигнал пересылки кодов промежуточных регистров в регистры сигналов управления. Схемы 42 клапанов открываются в коды сигналов управления из промежуточных регистров 36 и 37 кодов сигналов управления поступают в регистр 45 сигнала управления и в регистр 46 сигнала управления а с их выходов на входы соответствующи х цифро-аналоговых преобразователей 51. С выходов ци фро-аналоговых преобразователей 51 напряжения, соответствующие кодам сигналов управления и поступают на соответствующую пару ключей: ключ 52 положительных сигналов управления и ключ 53 отрицательных сигналов управления, состояние которых определяется знаковым зарядом регистр 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления, соответственно. В исходном состоянии ключи 52 закрыты, а ключи 53 открыты. Если в знаковом разряде регистра сигнала управления записан "0" низкий потенциал знакового разряда не изменяет состояния ключей 52 и 53. Следовательно, (фиг.12) напряжение, соответствующее коду сигналов управлениям выполняют пуск программы "Смещение вала". Вал 2 будет смещен отрицательного сигнала управления с выхода соответствующего цифро-аналогового преобразователя 51 через соответствующий ключ 53 поступит на инвертирующий вход операционного усилителя 56 сигнала управления сигналов управления и, выполняя пуски программы "Смещение вала", методом последовательных приближений добиваются выполнения равенства а напряжение, соответствующее коду при которых выполняется это равенство, запоминают. Не изменяя положения вала 2 считывают с экрана дисплея и запоминают величины зазоров положительного сигнала управления с выхода соответствующего цифро-аналогового преобразователя 51 через соответствующий ключ 52 поступит на инвертирующий вход операционного усилителя 57 сигнала управления в направлении полуоси Как и в первом случае, сигнал управления может быть равен нулю. С пульта цифрового блока 5 выполняют пуск программы "Отображение величин зазоров". С экрана дисплея считывают величины зазоров и сравнивают их. Если изменяют величины кодов и знаки Коды сигналов управления под датчиком 8 величин зазоров, установленных по полуосям и Положительный перепад напряжения сигнала управления с выхода операционного усилителя 57 и отрицательный перепад напряжения сигнала управления с выхода операционного усилителя 56, пропорциональные кодам сигналов системы координат (в сечении по A - A опоры 1). Относительно начального угла поворота управления через переключатель 91 "работа - несмещенное положение" поступают на первый и второй входы дифференциального усилителя 88 сигнала погрешности положения оси вращения вала на поворота к под датчиками 8 величин зазоров компенсатора 23 радиальных нагрузок, установленных по полуосям оси а с его выходов усиленные напряжения сигналов управления через переключатель 92 "вкл. - выкл." поступают на пьезоэлектрические двигатели 12 групп 15 и 17 регуляторов 14 давления. Полярность подключения групп 15 и 17 регуляторов давления к выходам дифференциального усилителя 88 такова, что на пьезоэлектрических двигателях 12 (ПЭД 12) группы 15 регуляторов давления напряжение повышается, а на пьезоэлектрических двигателях 12 группы 17 регуляторов давления напряжение понижается. В результате ПЭД 12 группы 15 регуляторов давления удлиняются и регулировочными иглами 13 призакрывают подводящие каналы жиклеров 10 подачи газа. Давление на выходах регуляторов 14 давления газа группы 15 регуляторов давления уменьшается. ПЭД 12 группы 17 регуляторов давления укорачиваются и регулировочными иглами 13 приоткрывают подводящие каналы жиклеров 10 подачи газа. Давление на выходах регуляторов 14 давления газа группы 17 регуляторов давления увеличивается. Под воздействием разности давлений групп 15 и 17 регуляторов давления вал 2 опоры сместится в направлении полуоси сигнал управления Причем, при смещении вала в направлении полуоси может быть равным нулю. Для смещения вала 2 в направлении полуоси на пультецифрового блока 5 набирают коды сигналов управления то есть изменяют знаки устанавливают вал 2 на углы На каждом угле системы координат в сечении по A - A опоры устанавливают равные величины зазоров Для установки равных величин зазоров выполняют те же действия, что и при установке равных величин зазоров вала 2. Сигналы на начальном угле поворота управления при которых равенство не и выполняется , запоминают. На каждом угле поворота вала изменяя величин сигналов = управления датчиком 8 величины зазора компенсатора 23 радиальной под (фиг.14) нагрузки, установленного системы координат на полуоси устанавливают величину зазора Если для этого вал 2 необходимо смещать в направлении полуоси на пульте цифрового блока 5 набирают коды сигналов управления на группы 16 и 18 регуляторов давления компенсатора 23 радиальной нагрузки и выполняют пуск программы "Смещение вала". В соответствии с алгоритмом работы этой программы сигналы управления и из цифрового блока 5 поступают в промежуточные регистры 35 и 34 кодов сигналов управления соответственно. С задержкой во времени относительно записи упомянутых сигналов управления в промежуточные регистры 34 и 35 кодов сигналов управления из цифрового блока 5 на схемы 42 клапанов поступает сигнал пересылки кодов промежуточных регистров 34 и 35 в регистры 43 и 44 сигналов управления. Схемы 42 клапанов открываются и коды сигналов управления и из промежуточных регистров 34 и 35 кодов сигналов управления поступают в регистр 43 сигнала управления и в регистр 44 сигнала управления а с их выходов на входы соответствующи х цифроаналоговых преобразователей 51. С выходов цифро-аналоговых преобразователей 51 напряжение сигнала управления через соответствующий открытый ключ 53 отрицательного сигнала управления поступает на инвертирующий вход операционного усилителя 54 сигнала управления коды на пульте цифрового блока 5 набирают сигналов управления то есть знаки сигналов управления измеряют на обратные и выполняют пуск программы "Смещение вала". Вал 2 будет смещен в направлении полуоси Причем, сигнал управления может быть равным нулю. С пульта цифрового блока 5 выполняют пуск подпрограммы "Отображение величин зазоров". С экрана дисплея считывают величину зазора и сравнивают ее с величиной Если изменяют коды сигналов управления и и, выполняя пуски программы "Смещение вала", методом последовательных приближений добиваются выполнения равенства Сигналы управления при которых выполняется равенство запоминают. Не изменяя величины сигналов управления а напряжение сигнала управления через соответствующий ключ 52 положительного сигнала управления поступает на неинвертирующий вход операционного усилителя выполняют пуск программы "Отображение величин зазоров". Считывают с экрана дисплея и запоминают 55 сигнала управления Положительный перепад напряжения сигнала управления с выхода операционного усилителя 55 и отрицательный перепад напряжения сигнала управления с выхода операционного усилителя 54 пропорциональные кодам сигналов управления системы координат через переключатель 91 "работа - несмещенное положение" поступают на первый и второй входы дифференциального усилителя 87 сигнала погрешности положения оси вращения вала по оси а с его выходов усиленные напряжения сигналов управления через переключатель 92 "вкл. - выкл." поступают на пьезоэлектрические двигатели 12 групп 16 и 18 регуляторов 14 давления. Полярность подключения групп 16 и 18 регуляторов давления к выходам дифференциального усилителя 87 такова, что на ПЭД 12 группы 16 регуляторов давления напряжение повышается, а на ПЭД 12 группы 18 регуляторов давления напряжение понижается. В результате ПЭД 12 группы 16 регуляторов давления удлиняется, а давление газа на выходах регуляторов 14 давления газа группы 16 регуляторов давления уменьшается. ПЭД 12 группы 18 регуляторов давления укорачиваются, а давление газа на выходах регуляторов 14 давления газа группы 18 регуляторов давления увеличивается. Под воздействием разности давлений групп 16 и 18 регуляторов давления вал 2 опоры сместится в направлении полуоси управления Причем, сигнал при смещении вала 1 в направлении полуоси может быть равным нулю. Для смещения вала 2 в направлении полуоси величину зазора под датчиком 8 величины зазора компенсатора 23 радиальной нагрузки, установленного по полуоси После измерения величин зазоров под датчиком 8 величин зазоров (датчик фиг.14) на всех дискретных угла х поворота вала 2 вал устанавливают на угол поворота 2 для которого На пульте цифрового блока 5 набирают коды сигналов управления которых выполнилось при равенство и выполняют пуск подпрограммы "Смещение вала". В результате группы 15, 16, 17, 18 регуляторов давления компенсатора 23 радиальной нагрузки установят вал 2 в положение, при котором выполняется: Поочередно выполняя пуски подпрограмм "Отображение величины зазоров" и "Смещение вала" и, варьируя сигналы управления на группы 15 и 17 регуляторов давления, устанавливают под датчиком 8 величины зазора компенсатора 23 радиальной нагрузки (датчик фиг.14) зазор, равный В этом положении вала 2 измеряют величины зазоров вычисляют и запоминают сумму а также запоминают начальные сигналы управления и обеспечивающие установку под упомянутым датчиком 8 величины зазора, равную С шагом вал 2 смещают в направлении полуоси системы координат величину На каждом на шаге смещения вала 2 вычисляют сумму запоминают и сигналы управления После перемещения вала 2 из начального положения на величину сигналы управления, определяют соответствующие минимальной сумме На пульте цифрового блока 5 набирают коды сигналов управления изменяя сигналы и, управления выполняют пуск подпрограммы "Смещение вала". В результате сечение вала 2 по A - A будет установлено симметрично относительно оси системы координат При этом большая ось эллипса в сечении вала 2 по A - A будет лежать на оси системы координат Сечение вала 2 по A - A устанавливают симметрично оси системы координат Для этого, не изменяя угла поворота вала 2, смешают его по оси системы координат в пределах величин с шагом На каждом шаге смещения вала 2 по оси измеряют величины зазоров под датчиками величин зазоров, установленных на оси системы координат сумму. Оставляют вал 2 котором сумма и устанавливают относительно оси Угол вал 8 и вычисляют их в положении, при 2 симметрично системы координат поворота вала 2 принимают в качестве нулевого угла поворота вала 2 Определяют эксцентриситет эллипса в сечении вала 2 по A - A. Для этого по показаниям измерителя 6 угла поворота вала 2 устанавливают вал 2 на угол поворота Поочередно выполняя пуски подпрограмм "Отображение величин зазоров" и "Смещение вала" по описанной выше методике под датчиками 8 величин зазоров (фиг.14) компенсатора 23 радиальной нагрузки, установленных по осям системы координат устанавливают и соответствующие не Причем, вращение вала 2 в процессе настройки и работы совмещенной шпиндельной опоры должно осуществлять вокруг оси вращения проходящей через центры сечений вала 2 по A - A и B - B, то есть прямая, проходящая через центры упомянутых сечений вала, является осью вращения вала 2. равные величины зазоров: и устанавливают сечение вала 2 по A - A симметрично осям системы координат Не изменяя углового положения вала 2 и считая, что сечение вала 2 по A - A имеет форму эллипса, малая полуось которого равна расчетному радиусу вала 2, вычисляют эксцентриситет этого эллипса. Для этого в цифровой блок 5 вводят значение радиуса вала 2 и выполняют пуск подпрограммы "Вычисление эксцентриситета". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 5 опрашивает измеритель 32 зазора по сигналу датчика 8 величины зазора, установленног го на полуоси системы координат и вычисляют величину большой полуоси эллипса: где - величина зазора под датчиком 8 величины зазора установленного на полуоси системы координат нулевом угле поворота вала 2. Вычисляют полуфокусное расстояние сечении вала 1 по A - A: на в (совмещают малую ось эллипса в сечении вала 2 по A - A с осью Не изменяя положения вала 2 под всеми датчиками 8 величин зазоров компенсатора 23 радиальной нагрузки, смещая их по высоте зазора, устанавливают равные величины зазоров: В результате выполнения приведенных выше действий на угле поворота вала 2, на котором был достигнут минимум величины зазора совмещают с центр сечения вала 2 по A - A началом системы координат а само сечение вала по A - A устанавливают симметрично относительно осей системы координат рассчитывают и запоминают эксцентриситет этого эллипса. Так как вал 2 совмещенной шпиндельной опоры изготавливается с погрешностью, уточняют величину малой полуоси эллипса принятой равной радиусу вала 2, а, следовательно, уточняют параметры ближайшего к сечению вала по A - A эллипса. Для уточнения параметров эллипса в сечении вала по A - A вал 2 устанавливают на угол поворота = 45°. Тогда вершина эллипса (фиг.14) переместится под центр основания датчика 8 величины зазора Смещают вал 2 (при приведенной выше методике) и на угле поворота устанавливают под датчиками 8 величин зазоров компенсатора 23 радиальной нагрузки равные величины зазоров: под датчиками 8 величин зазоров и сравнивают их с расчетными значениями величин зазоров, которые должны быть под этими датчиками 8, если малая полуось эллипса равна радиусу вала Для этого, как и ранее, выполняют пуск подпрограмм "Смещение вала" и "Отображение величин зазоров". Так как датчики 8 величин зазоров на угле поворота вала 2 были установлены с одинаковыми зазорами до поверхности вала 2, когда центр эллипса в сечении вала 2 по A - A уже был совмещен с началом системы координат а его полуоси были совмещены с осями этой системы координат, центр эллипса в сечении вала 2 по A - A после установки под датчиками равных величин зазоров также будет совпадать с началом системы координат Тогда, если малая полуось эллипса равна вала 2, под датчиками 8 величин зазоров (фиг.14) зазоры должны применять следующие значения: Если эти равенства не выполняются, предложение о равенстве малой полуоси эллипса радиусу вала 2 неверно. Для определения истинного значения малой полуоси эллипса а, следовательно, и точных параметров эллипса в сечении вала 2 по A - A выполняют пуск подпрограммы "Малая полуось эллипса". В соответствии с алгоритмом этой подпрограммы варьируется значение радиуса вала 2 в диапазоне среднеквадратическая погрешность инструмента, которым измерялся радиус вала 2, с шагом варьирования, например, 0,01мкм. Для каждого значения радиуса рассчитываются новые параметры эллипса 8 величин и величины зазоров под датчиками зазоров, соответствующие этим параметрам Вычисляется разность по измеренными величинами норме между зазоров и рассчитанными величинами зазоров для значения радиуса В качестве малой полуоси эллипса принимают то значение радиуса вала 2, которому соответствует минимальная норма (29). Рассчитывают точное значение большой полуоси эллипса: полуфокусное состояние а также эксцентриситет эллипса в течении вала 2 по A - A. 1.2. Вычисляют координаты датчиков 8 величин зазоров компенсатора 23 радиальной нагрузки, установленных по осям систем Для получения расчетных величин зазоров с пульта цифрового блока 5 выполняют пуск программы "Расчетные величины зазоров". В соответствии с алгоритмом работы этой подпрограммы по приведенным выше выражениям рассчитывают и запоминают величины зазоров координат в сечении пола 2 по A - A. Для выполнения этих действий с пульта цифрового блока 5 выполняют пуск подпрограммы "Вычисление координат датчиков". Исходными данными для работы подпрограммы являются: 1. - начальные величины зазоров, с которыми датчики 8 величин зазоров Не изменяя положения вала 2, на угле поворота вала выполняют пуск подпрограммы "Отображение величин зазоров", считывают с экрана дисплея величины зазоров были установлены относительно поверхности вала 2 на угле поворота вала 1 при совмещенных полуосях эллипса с осями системы координат 2. Углы (фиг.14) установки датчиков 8 величин зазоров относительно полуоси системы координат В соответствии с алгоритмом работы этой подпрограммы вычисляются полярные радиусы эллипса в сечении вала 2 по A - A на углах установки датчиков 8 величин зазоров: Рассчитываются и запоминаются координаты датчиков 8 величин зазоров в системах координат 1.4. Определяют координаты несмещенного положения оси вращения вала 2, проходящей через центры эллипсов в сечениях вала по A - A и B - B, при вращении вокруг которой вал 2 не нагружает опоры качения. Для выполнения этих действий на угле поворота вала 2 нагружают вал 2 малой нагрузкой в положительном направлении оси (фиг.5) системы координат которая не вызывает упругой де формации вала 2 опоры, но обеспечивает выбор зазоров в опорах 26 качения. 1.3. Определяют параметры эллипса в сечении вала 2 плоскостью установки датчиков 8 величин зазоров (в сечении по B - B (фиг.1)) компенсатора 24 радиальной нагрузки. Рассчитывают координаты датчиков 8 величин зазоров компенсатора 24 радиальной нагрузки. Для выполнения этих действий п.1.1 и п.1.2 выполняют для компенсатора 24 радиальной нагрузки. При этом на группы 19 и 21, 20 и 22 регуляторов давления поступают сигналы Не снимая нагрузки и не изменяя углового положения вала 2 пульта цифрового блока 5 выполняют пуск подпрограммы "Вычисление координат оси вращения вала". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 5: 1. Последовательно преобразует выходные напряжения измерителей 32 величин зазоров под датчиками 8 величин зазоров (фиг.12) установленных по осям цифровые управления в сечениях вала 2 по A - A и B - B в двоичные коды величин зазоров соответственно. В результате выполнения п.1.1 и п. 1.2 получают: - величину большой полуоси эллипса в сечении вала 2 по B - B. - полуфокусное расстояние эллипса в сечении вала 2 по B - B. и запоминают их. 2. По величинам зазоров под двумя из восьми датчиков 8 величин зазоров, установленных на разноименных осях систем координат - эксцентриситет эллипса в сечении вала по B - B. Координаты датчиков 8 величин зазоров установленных по осям систем координат и компенсатора 24 радиальной нагрузки имеют следующие значения: вычисляет выражением (3) в соответствии с пары координат центров сечений вала по A - A и B - B: вращения вала 2 в несмещенное положение с координатами 2.1. Вал 2 совмещенной шпиндельной опоры по показаниям измерителя 6 угла поворота 3. На угле поворота вала 2 вычисляется и запоминает оценки (точные значения) координат центров сечений вала 2 по A - A и B - B, смещенных под воздействием малой нагрузки в соответствии с выражениями (4) и (5). Координаты отображаются на экране дисплея цифрового блока 5. Последовательно вал 2 совмещенной шпиндельной опоры по показаниям 6 угла поворота вала 2 устанавливают на углы поворота На каждом угле поворота вала 2 нагружают на малой нагрузкой в направлении оси подвижной системы и выполняют пуск подпрограммы. "Вычисление координат оси вращения вала". Получают и запоминают точных значений координат центров сечений вала 2, смещенных под воздействием малой нагрузки Вычисляют оценки несмещенных координат оси вращения вала 2, проходящей через центры сечений вала 2 по A - A и B - B, при вращении вокруг которой вал 2 не нагружает опора качения. Для этого с пульта цифрового блока 5 выполняют пуск подпрограммы "Координаты несмещенной оси вращения". Алгоритм работы этой подпрограммы реализует выражение (6). Получают 2. Определяют множество групп сигналов управления привязанных к дискретным углам поворота вала 2, на группы 15, 16, 17, 18, регуляторов давления компенсатора 23 радиальной нагрузки и множество групп сигналов управления привязанных к дискретным углам поворота вала 2, на группы 19, 20, 21, 22 регуляторов давления компенсатора 24 радиальной нагрузки, подача которых на упомянутые группы регуляторов давления при повороте вала 2 на угол привязки данных групп сигналов управления обеспечивает установку оси устанавливают на угол и с пульта цифрового блока 5 выполняет пуск программы. "Вычисление координат оси вращения вала". Работа этой программы описана в п.1.4. В результате выполнения этой программы получают оценки координат оси вращения вала в сечениях вала по A - A и B - B, которые отображаются на экране дисплея. Сравнивают координаты, оси вращения вала 2 на угле с координатами несмещенного положения вала 2. соответственно. Если равенства не выполняются, выполняют пуски подпрограмм "Смещение вала" и "Вычисление координат оси вращения вала". Подбирая сигналы управления методом последовательных приближений добиваются выполнения упомянутых равенств и устанавливают их на угле поворота ось вращения вала 2 в несмещенное положение. Не изменяя сигналов управления с пульта цифрового блока 5 выполняют пуск подпрограммы "Формирование множества групп сигналов управления". В соответствии с алгоритмом работы этой подпрограммы коды сигналов управления в памяти цифрового блока 5 перемещаются в первые восемь ячеек массива множества групп сигналов управления. 2.2. Вал 2 совмещенной опоры последовательно устанавливают на углы поворота На каждом дискретном угле поворота вала 2 выполняют действия п.2.1. В результате выполнения п.2 в памяти цифрового блока 5 формируется массив множества сигналов управления: преобразует их вы ходные сигналы в цифровые двоичные коды и запоминает эти коды величин зазоров. В результате после n = 16 оборотов вала 2 в памяти цифрового блока 5 будут храниться коды величины зазоров под датчиками 8 величин зазоров величин зазоров, установленных в сечениях по A - A и B - B вала 2. По мере вращения вала 2 этих величин зазоров постоянно обновляются. При поступлении в цифровой блок 5метки обеспечивающий установку оси вращения вала 2 (на дискретных угла х его поворота) в несмещенное положение с координатами 3. Балансируют вал 2 совмещенной шпиндельной опоры. Для выполнения балансировки вала 2 совмещенной шпиндельной опоры с пульта цифрового блока 5 выполняют пуск подпрограммы "Смещение вала Г. В соответствии с алгоритмом работы этой подпрограммы в момент управления ее пуска сигналы управления считывается из массива множества сигналов управления в памяти цифрового блока и пересылаются в промежуточные регистры 34, 35, 36, 37, 38, 39, 40, 41 соответственно (фиг.12). По переднему фронту первой метки нулевого угла поворота вала 2, поступившей с измерителя 6 угла поворота в цифровой блок 5, из цифрового блока 5 на схемы 42 клапанов поступает сигнал пересылки кодов промежуточных регистров 34, 35, 36, 37, 38, 39, 40, 41 в регистры 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления, соответственно. Далее каждый из упомянутых сигналов управления поступают на соответствующую группу 15, 16, 17, 18, 19, 20, 21, 22, регуляторов давления по тем же цепям, что и при выполнения подпрограммы "Смещение вала". По переднему фронту первой метки нулевого угла поворота вала 2 из массива множества сигналов управления также считывают сигналы управления привязанные ко второй угловой дискете поворота вала 2 и пересылаются в промежуточные регистры 34, 35, 36, 37, 38, 39, 40, 40, 41, соответственно. Кроме того, при поступлении из измерителя 6 угла поворота вала каждой метки нулевого угла поворота цифровой блок 5 последовательно опрашивает измерители 32 величин зазоров, угла поворота вала 2 на угол по ее переднему фронту из цифрового блока 5 на схемы 42 клапанов поступает сигнал пересылки кодов промежуточных регистров 34, 35, 36, 37, 38, 39, 40, 41 в регистры 43, 44, 45, 46, 47, 48, 49, 50 сигналов управления. В результате сигналы управления поступят на соответствующую гр уппу регуляторов 15, 16, 17, 18, 19, 20, 21, 22 давления. Кроме того, по переднему фронту метки угла поворота вала 2 на угол сигналы управления привязанные к дискрете угла поворота вала 2, пересылаются из массива множества сигналов управления в памяти цифрового блока 5 в промежуточные регистры 34, 35, 36, 37, 38, 39, 40, 41, соответственно. Описанный процесс повторяется на каждой угловой дискрете привязки сигналов управления, Причем, если вал 2 совмещенной опоры сбалансирован, при поступлении на группы регуляторов давления упомянуты х сигналов управления, привязанных к угловым дискретам поворота вала 2, вал 2 будет вращаться вокруг несмещенной оси вращения. После получения кодов величин зазоров выполняют останов данной подпрограммы и с пульта цифрового блока 5 выполняют пуск подпрограммы "Вычисление координат оси вращения вала 1". Отличие алгоритма этой программы от алгоритма подпрограммы "Вычисление координат оси вращения вала" состоит в том, что для расчета координат оси вращения вала 2 цифровой блок использует коды величин зазоров, измеренные в процессе выполнения предыдущей подпрограммы на угле j = 0 угла поворота вала 2, то есть не выполняется опрос измерителей 32 величин зазоров. В результате получают и на этом работа подпрограммы заканчивается. Сравнивают полученные координаты с координатами несмещенного положения оси вращения вала 2. Если равенства не выполняются, вал 2 совмещенной шпиндельной опоры не сбалансирован. С пульта цифрового блока 5 выполняют пуск подпрограммы "Балансировка". Алгоритм работы данной подпрограммы реализует выражения (14), (15), (16), (17). В результате получают необходимые для балансировки вала 2 данные: - величины векторов динамической нагрузки в сечениях по А-А и В-В опоры (в системах координат - углы наклона вектора динамической нагрузки к осям систем координат - проекции векторов динамической нагрузки на оси систем координат на угле поворота вала 2. Изменяют положения балансировочных векторов 25 (корректирующих масс 25) и последовательно выполняя пуски подпрограмм "Смещение вала 1", "Вычисление координат оси вращения вала 1" и "Балансировка" методом последовательных приближений добиваются выполнения равенства и балансируют вал 2 при его вращении вокруг несмещенной оси вращения. 4. Работа совмещенной шпиндельной опоры в режиме стабилизации несмещенного положения оси вращения вала 2 при воздействии на него радиальной нагрузки. Для осуществления этого режима работы переключатели 91 "работа - несмещенное положение" устанавливают в положение "несмещенное положение" и подключают к входам дифференциальных усилителей 87, 88, 89, 90 выходы блока 3 выбора несмещенного положения оси вращения вала 2 совмещенной шпиндельной опоры (фиг.12). Переключатели 92 "вкл. выкл." устанавливают в положение "вкл." и получают дифференциальные усилители 87, 88, 89, 90 к соответствующим группам регуляторов 15, 16, 17, 18, 19, 20, 21, 22 давления компенсаторов 23 и 24 радиальной нагрузки. Валу 2 задают вращение с номинальной скоростью. С пульта цифрового блока 5 выполняют пуск подпрограммы "Смещение вала 1". В результате предварительно сбалансированный вал 2 опоры будет вращаться вокруг несмещенной оси вращения, проходящей через центры сечений вала 2 по A - A и B - B, с координатами Переключатели 33 "несмещенное положение управление" устанавливают в положение "несмещенное положение". Величины зазоров под датчиками 8 величин зазоров, установленных по полуосям системы координат соответственно) соответствующими измерителями 32 величин зазоров постоянно преобразуются в напряжения, соответствующие величинам этих зазоров, которые (фиг.12) через переключатели 33 "несмещенное положение управление" поступают на входы интегратора 62 выходного напряжения интегратора 63 выходного напряжения интегратора 64 выходного напряжения интегратора 65 выходного напряжения Напряжения постоянных составляющи х измерителей 32 величин зазоров по полуосям снимаемые с нагрузок интеграторов 62, 63, 64, 65, соответствуют (при отсутствии радиальной нагрузки на вал 2 опоры) вращению вала 2 вокруг несмещенной оси вращения и поступают на входы соответствующи х аналого-цифровых преобразователей 66. Нажимают кнопку 67 "Старт". Напряжение источника 68 питания кнопки "Старт" в качестве сигнала запуска поступает на сигнальные входы аналого-цифровых преобразователей 66. На выходах соотве тствующи х аналого-цифровых преобразователей 66 формируются двоичные коды постоянных составляющи х выходных напряжений интеграторов 62, 63, 64, 65, соответствующие несмещенному положению оси вращения вала 2. В момент времени окончания преобразования напряжений постоянных составляющи х на сигнальных выходах аналого-цифровых преобразователей 66 появляются сигналы готовности, которые поступают на сигнальные входы соответствующи х схем 73 клапанов регистров постоянных составляющих. В результате двоичные коды постоянной составляющей поступает регистр 69 кода постоянной составляющей составляющей постоянной поступает в регистр 70 кода постоянной составляющей постоянной составляющей Uп.с.xB поступает в регистр 71 кода постоянной составляющей поступает постоянной составляющей в регистр 72 кода постоянной составляющей и хранятся в эти х регистрах. С выходов регистров 69, 70, 71, 72 двоичные коды постоянных составляющих поступает на входы цифро-аналоговых преобразователей 74 кодов.постоянных составляющи х, а с их вы ходов постоянные напряжения соответствующие несмещенному положению вала 2 совмещенной шпиндельной опоры поступают на вторые входы блока 83 формирования опорного напряжения опорного блока 84 формирования напряжения блока 85 Формирования опорного напряжения блока 86 формирования опорного напряжения Uоп.yB. Переключатель 91 "работа - несмещенное положение" устанавливают в положение "работа" и подключают (фиг.12) к входам дифференциальных усилителей 87, 88, 89, 90 выходы блока 4 управления положением оси вращения вала 2 совмещенной шпиндельной опоры. Переключатели 33 "несмещенное положение управление" устанавливают в положение "управление". В положении переключателя 33 "управление" выходы измерителей 32 величин зазоров по сигналам датчиков 8 величин зазоров, измерителя 32 установленных по полуосям вращения вала по осям соответственно, между выходами этих дифференциальных усилителей возникают разности потенциалов противоположных знаков, которые поступают на группы 15, 17 и 19, 21 регуляторов давления компенсаторов 23 и 24 радиальной нагрузки, соответственно. Полярность подключения групп 15 и 17 регуляторов давления к дифференциальному усилителю такая, что сила давления на вал 2 группы 15 регуляторов давления увеличивается, а сила давления на вал 2 группы 17 регуляторов давления уменьшается. В результате группы 15 и 17 регуляторов давлений, установленные в сечении вала по Б - Б, систем поступают координат на вход блока 75 выделения огибающей выходного напряжения измерителя величины зазора, блока 76 выделения огибающей выходного напряжения измерителя величины зазора, блока 77 выделения огибающей выходного напряжения блока 78 измерителя величины зазора, вход выделения огибающей выходного напряжения измерителя величины зазора и через переключатель 91 в положении "работа" поступают на первые входы, дифференциального усилителя 87 сигнала погрешности положения оси вращения вала оси дифференциального усилителя 88 сигнала погрешности положения оси вращения вала по оси дифференциального усилителя 89 сигнала погрешности положения оси вращения вала по оси дифференциального усилителя 90 сигнала погрешности положения оси вращения вала по оси соответственно (фиг.12). С выходов блоков 75, 76, 77, 78 огибающие выходных напряжений упомянуты х измерителей 32 величин зазоров, амплитуды которых определяются величиной некруглости вала 2, поступают на первые входы блоков 83, 84, 85, 86 формирования опорных напряжений соответственно. Опорные напряжения с выходов блоков 83, 84, 85, 86 формирования опорных напряжений через переключатели 91 в положении "работа" поступают на вторые входы дифференциальных усилителей 87, 88, 89, 90 сигналов погрешности положения оси вращения вала по осям соответственно. Пусть радиальная составляющая , например, силы шлифования, воздействующая на вал 2 в момент времени начала шлифования, приложена к шлифовальной головке 28 в направлении полуоси (фиг.1). Под воздействием момента силы ось вращения вала 2 опоры будет поворачиваться в плоскости действия момента которая проходит через линию действия силы и точку на оси вращения, вокруг которой поворачивается эта ось вращения. В результате зазор под датчиком 8 величины зазора, установленном на полуоси будет а под датчиком 8 величины зазора на полуоси будет уменьшаться. Поэтому увеличивается напряжение на выходе измерителя 32 величины зазора по сигналу датчика 8 величины зазора на полуоси и уменьшится напряжение на выходе величины зазора по сигналу датчика 8 величины зазора на полуоси Под воздействием разностных сигналов между опорными напряжениями и выходными напряжениями упомянутых измерителей 32 величин зазоров на входах дифференциальных усилителей 88 и 90 погрешности положения оси создают силу действующую давления в на направлении вал 2, полуоси системы координат (фи г.12). Полярность подключения групп 19 и 21 регуляторов давления к дифференциальному усилителю 90 такая, что сила давления на вал 2 группы 21 регуляторов давления увеличивается, а сила давления на вал 2 группы 19 регуляторов давления уменьшается. В результате группы 19 и 21 регуляторов давления, установленные в сечении вала по Г - Г, создают силу действующую давления в системы координат на направлении вал 2, полуоси (фи г.12). Пара сил создает компенсирующий момент равный по величине и противоположный по направлению моменту радиальной составляющей силы шлифования и предотвращает смещение оси вращения вала 2 совмещенной шпиндельной опоры. Величина смещения вала 2 из несмещенного положения в сечениях вала по A - A и B - B под воздействием радиальной нагрузки, не превышающей подъемной силы групп регуляторов давления, установленных по одноименным осям систем координат определяется точностью измерителей 32 величин зазоров и коэффициентом усиления устройства 4 управления положением вала 2 совмещенной шпиндельной опоры и может не превышать 0,03мкм. Пьезоэлектрические двигатели 12 регуляторов 14 давления являются апериодическим звеном устройства автоматического управления и определяют величину задержки отработки сигнала рассогласования. Для повышения быстродействия (фиг.15) регуляторы 14 давления однорядных аэростатических опор с принудительно регулируемой подъемной силой могут оснащаться пропорциональным звеном, реализованным в виде коромысла 93, установленного в камере 11 регуляторов 14 давления на стойке 94 с возможностью поворота вокруг оси 95 вращения коромысла. Причем, регулировочные иглы 13 укреплены на коромыслах 93, а на пьезоэлектрических двигателях 12 установлены толкатели 96. Постоянное прилегание коромысел 93 к толкателям 96 обеспечивается пружинами 97 коромысел. Точка упора толкателя 96 в коромысло 93 делит расстояние между осью симметрии регулировочной иглы 13 и осью 95 вращения коромысла в заданном соотношении Следовательно, быстродействии регулятора 14 давления повышается в раз. Коромысло 93, установленное на стойке 94 с возможностью поворота вокруг оси 95 вращения коромысла, пьезоэлектрический двигатель 12, толкатель 98, регулировочная игла 13 и жиклер 10 подачи газа образуют быстродействующий регулятор давления.
ДивитисяДодаткова інформація
Назва патенту англійськоюComposite spindle bearing
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСовмещенная шпиндельная опора
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B24B 41/00, F16C 29/04, F16C 32/06
Мітки: опора, шпиндельна, суміщена
Код посилання
<a href="https://ua.patents.su/25-15383-sumishhena-shpindelna-opora.html" target="_blank" rel="follow" title="База патентів України">Суміщена шпиндельна опора</a>
Шпиндельна бабка фрезерного верстата
Номер патенту: 5240
Опубліковано: 28.12.1994
Автор: Мілащенко Володимир Іванович
МПК: B27C 5/00
Мітки: фрезерного, шпиндельна, бабка, верстата
Формула / Реферат:
Шпиндельная бабка фрезерного станка, включающая корпус, шпиндель с пинолью и хвостовиком, механизм подачи шпинделя и фиксатор шпинделя, отличающаяся тем, что шпиндель выполнен полым, а его хвостовик выполнен в виде промежуточного валика, один конец которого расположен внутри шпинделя и связан с ним шлицевым соединением, причем другой конец промежуточного валика установлен м опорах корпуса шпиндельной бабки, при этом фиксатор установлен на...
Пружна опора
Номер патенту: 17151
Опубліковано: 18.03.1997
Автори: Цілина Владислав Володимирович, Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 27/00
Формула / Реферат:
1. Упругая опора, содержащая втулку для установки вала вращающегося элемента станка со сквозными пазами, равномерно расположенными по окружности, отличающаяся тем, что пазы выполнены радиальными, в них размещены упруго поджатые в радиальном направлении вкладыши, причем паз с упруго поджатым в нем вкладышем образуют упругий элемент упругой опоры, при этом по крайней мере одна пара упомянутых упругих элементов, размещенных по полуосям и...
Універсально-збірна шпиндельна оснастка
Номер патенту: 17805
Опубліковано: 03.06.1997
Автори: Гаврилюк Юрій Романович, Хіцан Валерій Дмитрович, Карпусь Владислав Євгенович, Тимофієв Юрій Вікторович
МПК: B23B 39/00
Мітки: оснастка, універсально-збірна, шпиндельна
Формула / Реферат:
Уверсально-сборная шпиндельная оснастка, содержащая корпус, шпиндели и шпиндельные втулки, отличающаяся тем, что оснастка снабжена сменными объемными секторами, из тонкостенных оболочек, заполненных гидропластмассой и имеющих углы секторов в плане в пределах 30-90°, а втулки, несущие шпиндели, имеют ширину, равную ширине радиальных пазов, образованных тонкостенными оболочками соседних объемных секторов, а в корпусе, используемом для всех...
Універсально-збірна шпиндельна оснастка
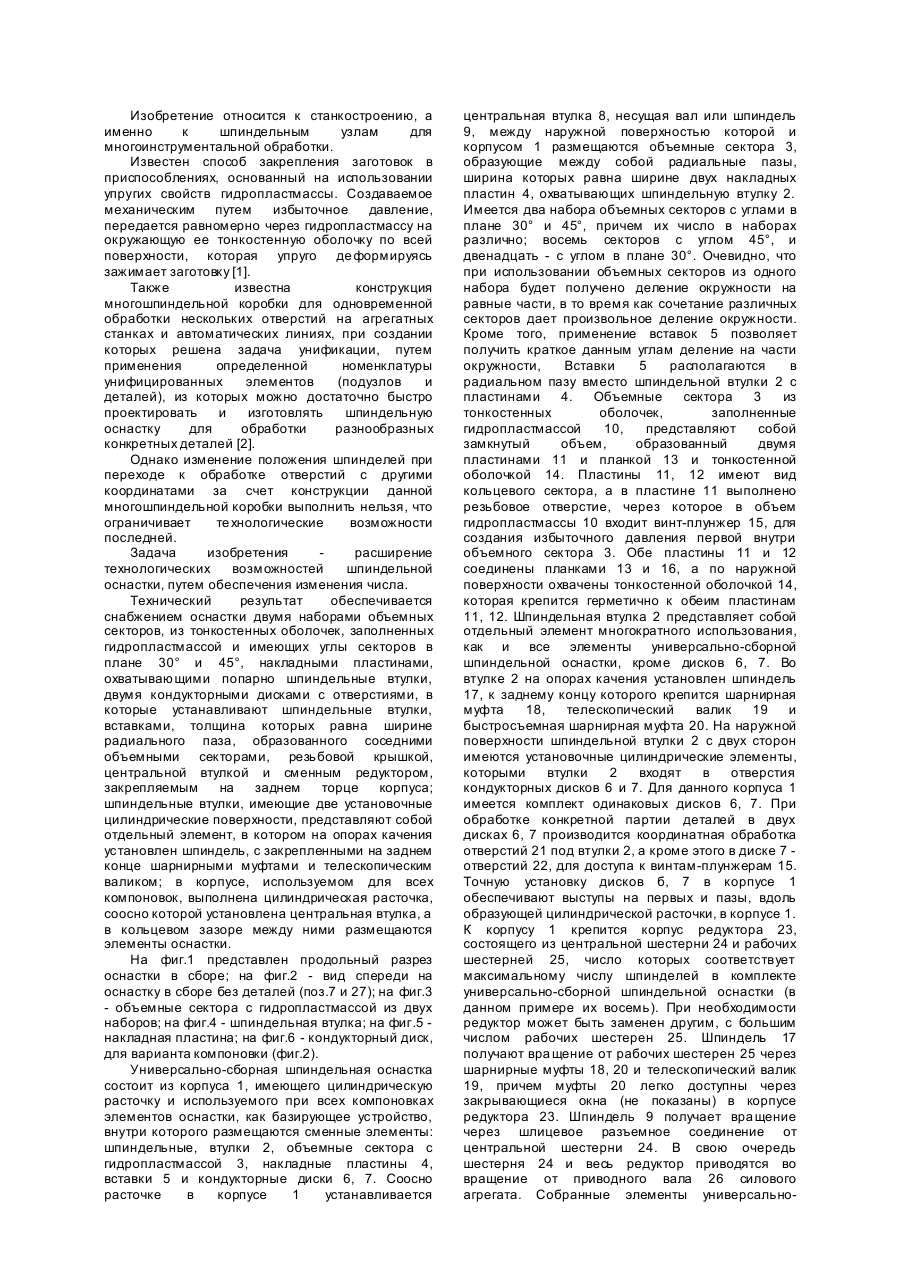
Номер патенту: 17380
Опубліковано: 15.04.1997
Автори: Гаврилюк Юрій Романович, Тимофієв Юрій Вікторович, Карпусь Владислав Євгенович, Хіцан Валерій Дмитрович
МПК: B23B 39/00
Мітки: універсально-збірна, оснастка, шпиндельна
Формула / Реферат:
Универсально-сборная шпиндельная оснастка, содержащая корпус, шпиндели и шпиндельные втулки, отличающаяся тем, что оснастка снабжена двумя наборами объемных секторов, из тонкостенных оболочек, заполненных гидропластмассой и имеющих углы секторов в плане 30° и 45°, накладными пластинами, охватывающими попарно шпиндельные втулки, двумя кондукторными дисками с отверстиями, в которые устанавливают шпиндельные втулки, вставками, толщина которых...
Пружна опора
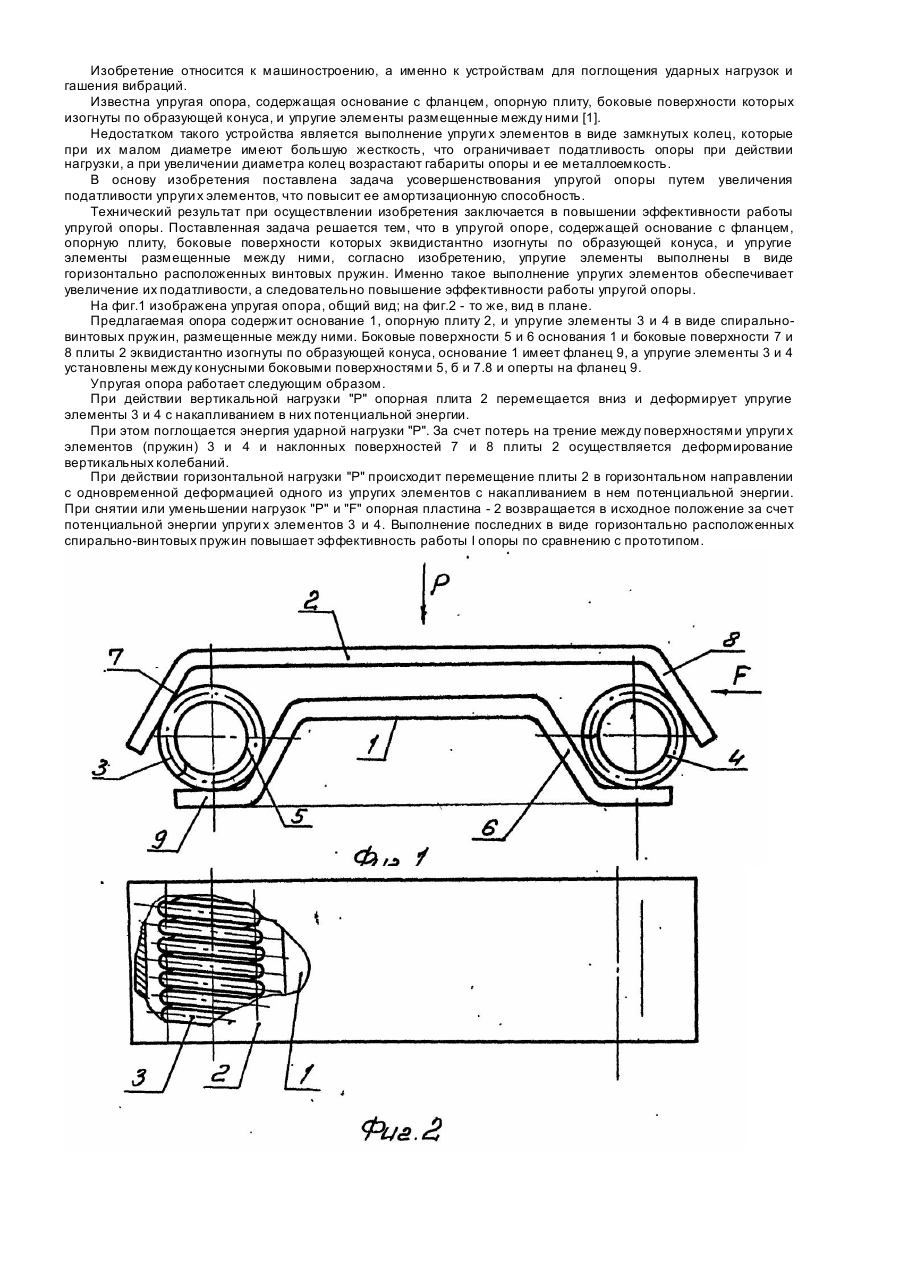
Номер патенту: 1718
Опубліковано: 25.10.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
Упругая опора, содержащая основание с фланцем, опорную плиту, боковые поверхности которых эквидистантно изогнуты по образующей конуса, и упругие элементы, размещенные между ними, отличающаяся тем, что упругие элементы выполнены в виде горизонтально расположенных винтовых пружин.
Попередній патент: Теплоізолююча суміш для розливання сталі та утеплення головної частини злитків
Наступний патент: Переривач-розподільник системи запалювання двигуна внутрішнього згоряння
Випадковий патент: Застосування міні-коренеплодів для вирощування моркви