Вимірювання керування радіоресурсами (rrm) користувацького обладнання (ue) в гетерогенній мережі (hetnet)
Номер патенту: 108098
Опубліковано: 25.03.2015
Автори: Сонг Осок, Дамняновіч Алєксандр, Ло Тао, Гаал Питер, Цзи Тінфан, Малладі Дурга Прасад
Формула / Реферат
1. Спосіб для бездротового зв'язку, який містить:
прийом передач від множини стільників, причому передачі включають в себе множину підкадрів;
визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і
виконання вимірювання радіоресурсів згаданого визначеного набору підкадрів.
2. Спосіб за п. 1, який додатково містить представлення звіту про вимірювання.
3. Спосіб за п. 1, в якому визначення містить прийом від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників.
4. Спосіб за п. 3, в якому список сусідів від обслуговуючого стільника переносить RPI в блоці системної інформації (SIB).
5. Спосіб за п. 1, в якому визначення містить:
прийом від обслуговуючого стільника згаданої RPI для обслуговуючого стільника; і
одержання згаданої RPI для одного або більше обслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника.
6. Спосіб за п. 5, в якому етап одержання містить розгляд згаданої RPI для одного або більше не обслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника.
7. Спосіб за п. 5, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів.
8. Спосіб за п. 1, в якому етап визначення містить прийом від одного або більше необслуговуючих стільників, RPI для одного або більше необслуговуючих стільників.
9. Спосіб за п. 8, в якому етап прийому згаданої RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників.
10. Спосіб за п. 8, в якому згадана RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ).
11. Спосіб за п. 1, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору стільників або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника.
12. Спосіб за п. 1, в якому етап вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником.
13. Спосіб за п. 1, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником.
14. Спосіб за п. 13, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для згаданих визначених підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд.
15. Спосіб за п. 14, в якому проміжок вимірювання триває щонайменше 10 мілісекунд.
16. Спосіб за п. 13, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання.
17. Спосіб за п. 13, який додатково містить посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу зі згаданим визначеним набором підкадрів.
18. Спосіб за п. 17, в якому запит на зміщення оснований на згаданій RPI згаданих стільників.
19. Пристрій для бездротового зв'язку, який містить:
засіб для прийому передач від множини стільників, причому передачі включають в себе множину підкадрів;
засіб для визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів
(RPI); і
засіб для виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів.
20. Пристрій за п. 19, який додатково містить засіб для представлення звіту про вимірювання.
21. Пристрій за п. 19, в якому засіб для визначення сконфігурований для прийому від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників.
22. Пристрій за п. 21, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB).
23. Пристрій за п. 19, в якому засіб для визначення сконфігурований для:
прийому від обслуговуючого стільника згаданої RPI для обслуговуючого стільника; і
одержання RPI для одного або більше необслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника.
24. Пристрій за п. 23, в якому етап одержання RPI для одного або більше необслуговуючих стільників містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою, як RPI для обслуговуючого стільника.
25. Пристрій за п. 23, в якому етап одержання RPI для одного або більше необслуговуючих стільників містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів.
26. Пристрій за п. 19, в якому засіб для визначення сконфігурований для прийому від одного або більше необслуговуючих стільників RPI для одного або більше необслуговуючих стільників.
27. Пристрій за п. 26, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників.
28. Пристрій за п. 26, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ).
29. Пристрій за п. 19, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP), утворюючого перешкоди стільника.
30. Пристрій за п. 19, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником.
31. Пристрій за п. 19, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником.
32. Пристрій за п. 31, в якому засіб для виконання сконфігурований для виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд.
33. Пристрій за п. 32, в якому проміжок вимірювання триває щонайменше 10 мілісекунд.
34. Пристрій за п. 31, в якому засіб для виконання сконфігурований для виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання.
35. Пристрій за п. 31, який додатково містить засіб для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів.
36. Пристрій за п. 35, в якому запит на зміщення оснований на згаданій RPI згаданих стільників.
37. Пристрій для бездротового зв'язку, який містить:
приймач, сконфігурований для прийому передач від множини стільників, причому передачі включають в себе множину підкадрів; і
щонайменше один процесор, сконфігурований для:
визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і
виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів.
38. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для представлення звіту про вимірювання.
39. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для визначення підкадрів шляхом прийому від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників.
40. Пристрій за п. 39, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB).
41. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для визначення підкадрів за допомогою:
прийому, від обслуговуючого стільника, RPI для обслуговуючого стільника; і
одержання RPI для одного або більше необслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника.
42. Пристрій за п. 41, в якому етап одержання містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника.
43. Пристрій за п. 41, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів.
44. Пристрій за п. 37, в якому щонайменше один процесор сконфігурований для визначення підкадрів за допомогою прийому, від одного або більше необслуговуючих стільників, RPI для одного або більше необслуговуючих стільників.
45. Пристрій за п. 44, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників.
46. Пристрій за п. 44, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ).
47. Пристрій за п. 37, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника.
48. Пристрій за п. 37, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване зобслуговуючим стільником або необслуговуючим стільником.
49. Пристрій за п. 37, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником.
50. Пристрій за п. 49, в якому згаданий щонайменше один процесор сконфігурований для виконання вимірювання радіоресурсів за допомогою виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання, довше ніж 6 мілісекунд.
51. Пристрій за п. 50, в якому проміжок вимірювання триває щонайменше 10 мілісекунд.
52. Пристрій за п. 49, в якому згаданий щонайменше один процесор сконфігурований для виконання вимірювання радіоресурсів за допомогою виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання.
53. Пристрій за п. 49, який додатково містить передавач, сконфігурований для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів.
54. Пристрій за п. 53, в якому запит на зміщення оснований на згаданій RPI згаданих стільників.
55. Зчитуваний комп'ютером носій, що містить інструкції, які зберігаються на ньому, для:
прийому передач від множини стільників, причому передачі включають в себе множину підкадрів;
визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і
виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів.
56. Зчитуваний комп'ютером носій за п. 55, який додатково містить інструкції для представлення звіту про вимірювання.
57. Зчитуваний комп'ютером носій за п. 55, в якому етап визначення містить прийом, від обслуговуючого стільника, RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників.
58. Зчитуваний комп'ютером носій за п. 57, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB).
59. Зчитуваний комп'ютером носій за п. 55, в якому визначення містить: прийом, від обслуговуючого стільника, RPI для обслуговуючого стільника; і одержання RPI для одного або більше необслуговуючих стільників на основі
згаданої RPI для обслуговуючого стільника.
60. Зчитуваний комп'ютером носій за п. 59, в якому етап одержання містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника.
61. Зчитуваний комп'ютером носій за п. 59, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів.
62. Зчитуваний комп'ютером носій за п. 55, в якому етап визначення містить прийом від одного або більше необслуговуючих стільників RPI для одного або більше необслуговуючих стільників.
63. Зчитуваний комп'ютером носій за п. 62, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників.
64. Зчитуваний комп'ютером носій за п. 62, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ).
65. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника.
66. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником.
67. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником.
68. Зчитуваний комп'ютером носій за п. 67, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання, довше ніж 6 мілісекунд.
69. Зчитуваний комп'ютером носій за п. 68, в якому проміжок вимірювання триває щонайменше 10 мілісекунд.
70. Зчитуваний комп'ютером носій за п. 67, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання.
71. Зчитуваний комп'ютером носій за п. 67, який додатково містить інструкції для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів.
72. Зчитуваний комп'ютером носій за п. 71, в якому запит на зміщення оснований на згаданій RPI згаданих стільників.
73. Спосіб для бездротового зв'язку, який містить:
визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів;
генерування в першій базовій станції інформації розділення ресурсів (RPI) зі щонайменше одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції; і
передачу підкадрів від першої базової станції згідно зі згаданою RPI, при цьому щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією.
74. Спосіб за п. 73, в якому перша базова станція використовує відмінну RAT, ніж друга базова станція.
75. Спосіб за п. 73, в якому перша базова станція використовує відмінну частоту, ніж друга базова станція.
76. Спосіб за п. 73, в якому щонайменше один підкадр містить більше ніж 2 підкадри.
77. Спосіб за п. 73, в якому етап визначення містить прийом індикації проміжку вимірювання за допомогою зворотного з'єднання між першою і другою базовими станціями.
78. Пристрій для бездротового зв'язку, який містить:
засіб для визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів;
засіб для генерування інформації розділення ресурсів (RPI) зі щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів пристрою; і
засіб для передачі підкадрів від пристрою згідно зі згаданою RPI, в якому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією.
79. Пристрій за п. 78, в якому пристрій використовує відмінну RAT, ніж базова станція.
80. Пристрій за п. 78, в якому пристрій використовує відмінну частоту, ніж базова станція.
81. Пристрій за п. 78, в якому щонайменше один підкадр містить більше ніж 2 підкадри.
82. Пристрій за п. 78, в якому засіб для визначення сконфігурований для прийому індикації проміжку вимірювання за допомогою зворотного з'єднання між пристроєм і базовою станцією.
83. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, сконфігурований для:
визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; і
генерування інформації розділення ресурсів (RPI) зі щонайменше одним підкадром, позначеним для вимірювань радіоресурсів пристрою; і
передавач, сконфігурований для передачі підкадрів від пристрою згідно зі згаданою RPI, при цьому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією.
84. Пристрій за п. 83, в якому пристрій використовує відмінну RAT, ніж базова станція.
85. Пристрій за п. 83, в якому пристрій використовує відмінну частоту, ніж базова станція.
86. Пристрій за п. 83, в якому щонайменше один підкадр містить більше ніж 2 підкадри.
87. Пристрій за п. 83, в якому згаданий щонайменше один процесор сконфігурований для визначення проміжку вимірювання за допомогою прийому індикації проміжку вимірювання за допомогою зворотного з'єднання між пристроєм і базовою станцією.
88. Зчитуваний комп'ютером носій, що містить інструкції, які зберігаються на ньому, для:
визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів;
генерування в першій базовій станції інформації розділення ресурсів (RPI) щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції; і
передачі підкадрів від першої базової станції згідно з RPI, де щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією.
89. Зчитуваний комп'ютером носій за п. 88, в якому перша базова станція використовує відмінну RAT, ніж друга базова станція.
90. Зчитуваний комп'ютером носій за п. 88, в якому перша базова станція використовує відмінну частоту, ніж друга базова станція.
91. Зчитуваний комп'ютером носій за п. 88, в якому щонайменше один підкадр містить більше ніж 2 підкадри.
92. Зчитуваний комп'ютером носій за п. 88, в якому етап визначення містить прийом індикації проміжку вимірювання за допомогою зворотного з'єднання між першою і другою базовими станціями.
Текст
Реферат: Забезпечені способи і пристрій для виконання вимірювань керування радіоресурсами (RRM) в гетерогенній мережі (HetNet), щоб запобігти збою процедур вимірювання RRM в сценарії домінуючих перешкод. Декілька альтернатив забезпечені для визначення конкретних ресурсів (наприклад, підкадрів), щоб використовувати для виконання вимірювань RRM, де ці конкретні ресурси основані на спільному розділенні ресурсів між стільниками HetNet, в якій стільники можуть мати різні типи (наприклад, макро-, піко- або фемтостільники). Ці альтернативи включають в себе, наприклад: (1) внутрішньочастотні або внутрішньо-RAT (технологія UA 108098 C2 (12) UA 108098 C2 радіодоступу) альтернативи, які можуть використовувати передачу інформації розділення ресурсів (RPI) або одержання RPI необслуговуючого стільника на основі RPI обслуговуючого стільника, а також (2) міжчастотні або між-RAT альтернативи, де вимірювання RRM можуть бути виконані протягом проміжку вимірювання. UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 Перехресне посилання на пов'язані заявки Дана заявка заявляє пріоритет попередньої заявки на патент США №61/323,858, поданої 13 квітня 2010 року, яка включена тут за посиланням. Галузь, до якої належить винахід Даний опис в цілому стосується зв'язку і, більш конкретно, способів для підтримки зв'язку в мережі бездротового зв'язку. Попередній рівень техніки Мережі бездротового зв'язку широко застосовуються для забезпечення різних послуг зв'язку, таких як голос, відео, пакетні дані, передача повідомлень, мовлення тощо. Ці бездротові мережі можуть бути мережами множинного доступу, здатними підтримувати множинних користувачів за допомогою спільного використання доступних ресурсів мережі. Приклади таких мереж множинного доступу включають в себе мережі множинного доступу з кодовим розділенням каналів (CDMA), мережі множинного доступу з часовим розділенням каналів (TDMA), мережі множинного доступу з частотним розділенням каналів (FDMA), мережі ортогонального FDMA (OFDMA) і мережі FDMA і єдиної несучої (SC-FDMA). Мережа бездротового зв'язку може включати в себе ряд базових станцій, які можуть підтримувати зв'язок для низки користувацьких обладнань (обладнань UE). UE може зв'язуватися з базовою станцією за допомогою низхідної лінії зв'язку і висхідної лінії зв'язку. Низхідна лінія зв'язку (або пряма лінія зв'язку) стосується лінії зв'язку від базової станції до UE, і висхідна лінія зв'язку (або зворотна лінія зв'язку) стосується лінії зв'язку від UE до базової станції. Базова станція може передавати дані та інформацію керування по низхідній лінії зв'язку на UE і/або може приймати дані та інформацію керування по висхідній лінії зв'язку від UE. По низхідній лінії зв'язку передача від базової станції може спостерігати перешкоди через передачі від сусідніх базових станцій. По висхідній лінії зв'язку передача від UE може викликати перешкоди для передач від інших обладнань UE, що зв'язуються із сусідніми базовими станціями. Перешкоди можуть погіршити продуктивність як по низхідній лінії зв'язку, так і по висхідній лінії зв'язку. Суть винаходу Деякі аспекти даного опису в цілому стосуються виконання вимірювань керування радіоресурсами (RRM) в гетерогенній мережі (HetNet), щоб запобігти збою процедур вимірювання RRM з одним стільником за наявності серйозних перешкод від іншого стільника. Декілька альтернатив забезпечені для визначення конкретних ресурсів (наприклад, підкадрів), щоб використовувати для виконання вимірювань RRM, де конкретні ресурси основані на спільному розподілі ресурсів між стільниками HetNet, де стільники можуть мати різні типи (наприклад, макро-, піко- або фемтостільники). Ці альтернативи включають в себе, наприклад: (1) внутрішньочастотні або внутрішньо-RAT (технологія радіодоступу) альтернативи, які можуть залучати передачу інформації розділення ресурсів (RPI) або (логічне) виведення RPI не обслуговуючого стільника на основі RPI обслуговуючого стільника, а також (2) міжчастотні або між-RAT альтернативи, в яких вимірювання RRM можуть бути виконані протягом проміжку вимірювання. Таким способом UE може зробити вимірювання радіоресурсів сигналів, прийнятих від одного стільника, під час деяких підкадрів з обмеженими перешкодами від іншого стільника. Деякі аспекти даного опису забезпечують спосіб для бездротового зв'язку. Спосіб в цілому включає в себе прийом передач в підкадрах від стільників, визначення підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI) для стільників, виконання вимірювання радіоресурсів для визначених підкадріві представлення звіту про це вимірювання. Деякі аспекти даного опису забезпечують пристрій для бездротового зв'язку. Пристрій в цілому включає в себе засіб для прийому передач в підкадрах від стільників, засіб для визначення підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI) для стільників, засіб для виконання вимірювання радіоресурсів для визначених підкадрів і засіб для представлення звіту про це вимірювання. Деякі аспекти даного опису забезпечують пристрій для бездротового зв'язку. Пристрій в цілому включає в себе приймач, сконфігурований для прийому передач в підкадрах від стільників і щонайменше один процесор. Цей щонайменше одиь процесор сконфігурований для визначення підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI) для стільників, виконання вимірювання радіоресурсів для визначених підкадрів і представлення звіту про це вимірювання. Деякі аспекти даного опису забезпечують комп'ютерний програмний продукт для бездротового зв'язку. Комп'ютерний програмний продукт звичайно включає в себе зчитуваний 1 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 комп'ютером носій, що має код для прийому передач в підкадрах від стільників, для визначення підкадрів, щоб включити у вимірювання радіоресурсів, на основі інформації розділення ресурсів (RPI) для стільників, для виконання вимірювання радіоресурсів для визначених підкадрів і для представлення звіту про це вимірювання. Деякі аспекти даного опису забезпечують спосіб для бездротового зв'язку. Спосіб в цілому включає в себе визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; генерування в першій базовій станції інформації розділення ресурсів (RPI) щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції; і передачу підкадрів від першої базової станції згідно з RPI, причому щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією. Деякі аспекти даного опису забезпечують пристрій для бездротового зв'язку. Пристрій в цілому включає в себе засіб для визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; засіб для генерування інформації розділення ресурсів (RPI) щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів пристрою; і засіб для передачі підкадрів від пристрою згідно з RPI, причому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією. Деякі аспекти даного опису забезпечують пристрій для бездротового зв'язку. Пристрій в цілому включає в себе щонайменше один процесор і передавач. Щонайменше один процесор звичайно сконфігурований для визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, і генерування інформації розділення ресурсів (RPI) щонайменше з одним підкадром, позначеним для вимірювань . радіоресурсів першої базової станції. Передавач в цілому сконфігурований для передачі підкадрів від пристрою згідно з RPI, причому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією. Деякі аспекти даного опису забезпечують комп'ютерний програмний продукт для бездротового зв'язку. Комп'ютерний програмний продукт звичайно включає в себе зчитуваний комп'ютером носій, що має код для визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; для генерування в першій базовій станції інформації розділення ресурсів (RPI) щонайменше з одним підкадром, що позначається для вимірювань радіоресурсів першої базової станції; і для передачі підкадрів від першої базової станції згідно з RPI, де щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією. Різні аспекти та ознаки даного розкриття описані в додаткових подробицях нижче. Короткий опис креслень Фіг. 1 є блок-схемою, яка концептуально ілюструє приклад мережі бездротового зв'язку відповідно до деяких аспектів даного опису. Фіг. 2 є блок-схемою, яка концептуально ілюструє приклад структури кадру в мережі бездротового зв'язку відповідно до деяких аспектів даного опису. Фіг. 2А показує зразковий формат для висхідної лінії зв'язку в проекті довгострокового розвитку (LTE) відповідно до деяких аспектів даного опису. Фіг. 3 є блок-схемою, яка концептуально ілюструє приклад Вузла В у зв'язку з користувацьким обладнанням (UE) в мережі бездротового зв'язку відповідно до деяких аспектів даного опису. Фіг. 4 ілюструє зразкову гетерогенну мережу відповідно до деяких аспектів даного опису. Фіг. 5 ілюструє зразкове розділення ресурсів у гетерогенній мережі відповідно до деяких аспектів даного опису. Фіг. 6 ілюструє зразкове спільне розділення підкадрів у гетерогенній мережі відповідно до деяких аспектів даного опису. Фіг. 7 ілюструє зразкове спільне розділення підкадрів з трьома підкадрами використання (U) і різні проміжки вимірювання для того, щоб зробити міжчастотні або між-RAT (технологія радіодоступу) вимірювання відповідно до деяких аспектів даного опису. Фіг. 8 є функціональною блок-схемою, яка концептуально ілюструє зразкові етапи, які виконуються для виконання вимірювання радіоресурсів для визначених підкадрів, відповідно до деяких аспектів даного опису. 2 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 8А ілюструє зразкові компоненти, здатні виконувати операції, ілюстровані на Фіг. 8. Фіг. 9 є функціональною блок-схемою, яка концептуально ілюструє зразкові етапи, здійснені для генерування інформації розділення ресурсів (RPI) в першій базовій станції таким чином, щоб щонайменше один підкадр, позначений для вимірювання радіоресурсів, потрапляв у межі проміжку вимірювання, асоційованого з другою базовою станцією, відповідно до деяких аспектів даного опису. Фіг. 9 А ілюструє зразкові компоненти, здатні виконувати операції, ілюстровані на Фіг. 9. Докладний опис Способи, описані в даному описі, можуть бути використані для різних мереж бездротового зв'язку, таких як CDMA, TDMA, FDMA, OFDMA, SC-FDMA та інших мереж. Терміни «мережа» та «система» часто використовуються взаємозамінно. Мережа CDMA може реалізовувати радіо технологію, таку як універсальна система наземного радіодоступу (UTRA), cdma2000 тощо. UTRA включає в себе Широкосмуговий-CDMA (W-CDMA) та інші варіанти CDMA. Додатково, cdma2000 охоплює стандарти IS-2000, IS-95 ,та IS-856. Мережа TDMA може реалізовувати радіо технологію, таку як глобальна система мобільного зв'язку (GSM). Мережа OFDMA може реалізовувати радіотехнологію, таку як вдосконалена UTRA (E-UTRA), передача в широкосмуговому діапазоні для мобільних пристроїв (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, флеш-OFDMD тощо. UTRA та E-UTRA є частиною універсальної системи мобільного зв'язку (UMTS). Проект довгострокового розвитку (LTE) 3GPP і розвинений LTE (LTE-A) є випусками UMTS, яка використовує E-UTRA, яка використовує OFDMA по низхідній лінії зв'язку і SC-FDMA по висхідній лінії зв'язку. UTRA, E-UTRA, UMTS, LTE, LTE-A та GSM описані в документах від організації «Проект партнерства третього покоління» (3GPP). Додатково, cdma2000 і UMB описані в документах від організації «Проект партнерства третього покоління 2» (3GPP2). Способи, описані в даному описі, можуть бути використані для бездротових мереж і радіотехнологій, згаданих вище, а також інших бездротових мереж і радіотехнологій. Для розуміння деякі аспекти способів описані нижче для LTE, і термінологія LTE використовується у великій частині опису нижче. Зразкова бездротова мережа Фіг. 1 показує мережу 100 бездротового зв'язку, яка може бути мережею LTE. Бездротова мережа 100 може включати в себе ряд вдосконалених Вузлів В 110 (вузлів eNB) та інші об'єкти мережі. eNB може бути станцією, яка зв'язується з пристроями користувацького обладнання (обладнаннями UE) і може також називатися базовою станцією, Вузлом В, точкою доступу тощо. Кожний eNB 110 може забезпечити охоплення (покриття для) зв'язку для конкретної географічної зони. У 3GPP термін «стільник» може стосуватися зони охоплення eNB і/або підсистеми eNB, обслуговуючої цю зону охоплення, залежно від контексту, в якому використовується термін. eNB може забезпечити охоплення зв'язку для макростільника, пікостільника, фемтостільника і/або інших типів стільника. Макростільник може охоплювати відносно велику географічну зону (наприклад, декілька кілометрів в радіусі) і може дозволяти необмежений доступ за допомогою обладнань UE з підпискою на послугу. Пікостільник може охоплювати відносно маленьку географічну зону і може, дозволяти необмежений доступ за допомогою обладнань UE з підпискою на послугу. Фемтостільник може охоплювати відносно маленьку географічну зону (наприклад, будинок) і може дозволяти обмежений доступ за допомогою обладнань UE, які мають асоціацію з фемтостільником (наприклад, обладнань UE в закритій групі абонентів (CSG), обладнань UE для користувачів будинку тощо). eNB для макростільника може називатися макро eNB. eNB для пікостільника може називатися піко eNB. eNB для фемтостільника може називатися фемто eNB або домашнім eNB. У прикладі, показаному на Фіг. 1, вузли eNB 110а, 110b та 110c можуть бути макровузлами eNB для макростільників 102а, 102b та 102с, відповідно. eNB 110x може бути піко eNB для пікостільника 102х. Вузли eNB 110y та 110z можуть бути фемтовузлами eNB для фемтостільників 102у та 102z, відповідно. eNB може підтримувати одну або множину (наприклад, три) стільників. Бездротова мережа 100 може також включати в себе ретрансляційні станції. Ретрансляційною станцією є станція, яка приймає передачу даних і/або іншу інформацію від розташованої попередньої (на шляху передачі сигналу) станції (наприклад, eNB або UE) і посилає передачу даних і/або іншу інформацію на розташовану наступною (на шляху передачі сигналу) станцію (наприклад, UE або eNB). Ретрансляційною станцією може також бути UE, яке ретранслює передачі для інших обладнань UE. У прикладі, показаному на Фіг. 1, ретрансляційна станція 110r може зв'язуватися з eNB 110а та UE 120r, щоб полегшити зв'язок між eNB 110a та UE 120r. Ретрансляційна станція може також називатися eNB ретрансляції, ретрансляцією тощо. 3 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 Бездротова мережа 100 може бути гетерогенною мережею (HetNet), яка включає в себе вузли eNB різних типів, наприклад, макровузли eNB, піковузли eNB, фемтовузли eNB, ретрансляційні станції тощо. Ці різні типи вузлів eNB можуть мати різні рівні потужності передачі, різні зони охоплення і різний вплив на перешкоди в бездротовій мережі 100. Наприклад, макро eNB можуть мати високий рівень потужності передачі (наприклад, 20 ватт), тоді як піко eNB, фемто eNB і ретрансляційні станції можуть мати більш низький рівень потужності передачі (наприклад, 1 ватт). Бездротова мережа 100 може підтримувати синхронну або асинхронну роботу. Для синхронної роботи вузли eNB можуть мати аналогічну кадрову синхронізацію, і передачі від різних вузлів eNB, можуть бути приблизно вирівняні за часом. Для асинхронної роботи вузли eNB можуть мати різну кадрову синхронізацію, і передачі від різних вузлів eNB можуть не бути вирівняні за часом. Способи, описані в даному описі, можуть бути використані як для синхронної, так і для асинхронної роботи. Контролер 130 мережі може з'єднуватися з рядом вузлів eNB і забезпечувати координацію і керування для цих вузлів eNB. Контролер 130 мережі може зв'язуватися з вузлами eNB 110 за допомогою зворотного з'єднання. Вузли eNB 110 можуть також зв'язуватися один з одним, наприклад, прямо або непрямо за допомогою бездротового або дротового зворотного з'єднання. Обладнання UE 120 можуть бути «розкидані» по всій бездротовій мережі 100, і кожне UE може бути стаціонарним або мобільним. UE може також називатися терміналом, мобільною станцією, блоком абонента, станцією тощо. UE може бути стільниковим телефоном, персональним цифровим асистентом (PDA), бездротовим модемом, пристроєм бездротового зв'язку, переносним пристроєм, ноутбуком, бездротовим телефоном, станцією місцевого радіозв'язку (WLL), планшетним ПК тощо. UE може бути здатна зв'язуватися з макро eNB, піко eNB, фемто eNB, ретрансляційними станціями тощо. На Фіг. 1 суцільна лінія з подвійними стрілками вказує бажані передачі між UE і обслуговуючим eNB, який є eNB, позначеним для обслуговування UE по низхідній лінії зв'язку і/або висхідній лінії зв'язку. Пунктирна лінія з подвійними стрілками вказує утворюючі перешкоди передачі між UE та eNB. LTE використовує мультиплексування з ортогональним частотним розділенням каналів (OFDM) по низхідній лінії зв'язку і мультиплексування з частотним розділенням каналів і єдиною несучою (SC-FDM) по висхідній лінії зв'язку. OFDM та SC-FDM розділяють смугу частот системи на множинні (K) ортогональні піднесучі, які також звичайно називаються тонами, контейнерами тощо. Кожна піднесуча може модулюватися даними. В цілому, символи модуляції посилаються в частотній ділянці за допомогою OFDM і у часовій ділянці за допомогою SC-FDM. Інтервал між суміжними піднесучими може бути фіксований, і загальна кількість піднесучих (K) може залежати від смуги частот системи. Наприклад, K може дорівнювати 128, 256, 512, 1024 або 2048 для смуги частот системи 1,25, 2,5, 5, 10 або 20 мегагерц (МГц), відповідно. Смуга частот системи може також бути розділена на частотні піддіапазони. Наприклад, частотний піддіапазон може охоплювати 1,08 МГц, і може бути 1, 2, 4, 8 або 16 частотних піддіапазонів для смуги частот системи 1,25, 2,5, 5,10 або 20 МГц, відповідно. Фіг. 2 показує структуру кадру, що використовується в LTE. Шкала часу передачі для низхідної лінії зв'язку може бути розділена на одиниці радіокадрів. Кожний радіокадр може мати заздалегідь визначену тривалість (наприклад, 10 мілісекунд (ms)) і може бути розділений на 10 під кадрів з індексами від 0 до 9. Кожний підкадр може включати в себе два слоти. Кожний радіокадр може, таким чином, включати в себе 20 слотів з індексами від 0 до 19. Кожний слот може включати в себе L символьних періодів, наприклад, L=7 символьних періодів для нормального циклічного префікса (як показано на Фіг. 2) або L=6 символьних періодів для розширеного циклічного префікса. 2L символьним періодам в кожному підкадрі можуть бути призначені індекси 0-2L-1. Доступні часово-частотні ресурси можуть бути розділені в блоки ресурсів. Кожний блок ресурсів може охоплювати N піднесучих (наприклад, 12 піднесучих) в одному слоті. У LTE eNB може посилати первинний сигнал синхронізації (PSS) і вторинний сигнал синхронізації (SSS) для кожного стільника в eNB. Первинний і вторинний сигнал синхронізації можуть бути послані в символьних періодах 6 та 5, відповідно, в кожному з підкадрів 0 та 5 кожного радіокадру із звичайним циклічним префіксом, як показано на Фіг. 2. Сигнали синхронізації можуть бути використані обладнаннями UE для виявлення і захоплення стільника. eNB може посилати фізичний канал мовлення (PBCH) в символьних періодах від 0 до 3 в слоті 1 підкадру 0. PBCH може переносити деяку інформацію системи. eNB може посилати фізичний канал індикатора формату керування (PCFICH) в першому символьному періоді кожного підкадру, як показано на Фіг. 2. PCFICH може передавати кількість 4 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 символьних періодів (M), що використовуються для каналів керування, де M може дорівнювати 1, 2 або 3 і може змінюватися від підкадру до підкадру. M може також дорівнювати 4 для невеликої смуги частот системи, наприклад, з менше ніж 10 блоками ресурсів. eNB може посилати фізичний канал індикатора HARQ (PHICH) і фізичний канал керування низхідною лінією зв'язку (PDCCH) в перших M символьних періодів кожного підкадру (не показані на Фіг. 2). РHІСН може переносити інформацію для підтримки гібридного автоматичного запиту на повторну передачу даних (HARQ). PDCCH може переносити інформацію відносно розподілу ресурсів для обладнань UE і інформацію керування для каналів низхідної лінії зв'язку. eNB може посилати спільно використовуваний фізичний канал низхідної лінії зв'язку (PDSCH) в символьних періодах кожного підкадру, що залишилися. PDSCH може переносити дані для обладнань UE, запланованих для передачі даних по низхідній лінії зв'язку. Різні сигнали і канали в LTE описані в 3GPP TS 36.211, названому «Evolved Universal Terrestrial Radio Access (EUTRA); Physical Channel and Modulation», який знаходиться в суспільному доступі. eNB може посилати PSS, SSS та PBCH в центрі 1,08 МГц смуги частот системи, що використовується вузлом eNB. eNB може посилати PCFICH та PHICH по всій смузі частот системи в кожному символьному періоді, в якому посилаються ці канали. eNB може посилати PDCCH в групи обладнань UE в деяких частинах смуги частот системи. eNB може посилати PDSCH на конкретні обладнання UE в конкретних частинах смуги частот системи. eNB може посилати PSS, SSS, PBCH, PCFICH та PHICH способом мовлення на всі обладнання UE, може посилати PDCCH способом одноадресного мовлення на конкретні обладнання UE, і може також посилати PDSCH способом одноадресної передачі на конкретні обладнання UE. Багато елементів ресурсів можуть бути доступні в кожному символьному періоді. Кожний елемент ресурсів може охоплювати одну піднесучу в одному символьному періоді і може бути використаний для посилання одного символу модуляції, який може бути дійсним або комплексним значенням. Елементи ресурсів, що не використовуються для опорного сигналу в кожному символьному періоді, можуть бути скомпоновані в групи елементів ресурсів (групи REG). Кожна REG може включати в себе чотири елементи ресурсів в одному символьному періоді. PCFICH може займати чотири групи REG, які можуть бути розташовані приблизно рівномірно за частотою в символьному періоді 0. PHICH може займати три групи REG, які можуть бути розподілені за частотою в одному або більше конфігурованих символьних періодах. Наприклад, три групи REG для PHICH можуть мати місце в символьному періоді 0 або можуть бути розподілені в символьних періодах 0, 1 та 2. PDCCH може займати 9, 18, 32 або 64 груп REG, які можуть бути вибрані з доступних груп REG в перших M символьних періодах. Тільки деякі комбінації груп REG можуть бути дозволені для PDCCH. UE може знати конкретні групи REG, що використовуються для PHICH та PCFICH. UE може шукати різні комбінації груп REG для PDCCH. Кількість комбінацій для пошуку звичайно менше, ніж кількість дозволених комбінацій для PDCCH. eNB може посилати PDCCH на UE в будь-якій з комбінацій, які UE буде шукати. Фіг. 2А показує зразковий формат 200А для висхідної лінії зв'язку в LTE. Доступні блоки ресурсів для висхідної лінії зв'язку можуть бути розділені на секцію даних і секцію керування. Секція керування може бути сформована на двох краях смуги частот системи і може мати конфігурований розмір. Блоки ресурсів секції керування можуть бути призначені на обладнання UE для передачі інформації керування. Секція даних може включати в себе всі блоки ресурсів, не включені в секцію керування. Структура на Фіг. 2 приводить до секції даних, що включає в себе суміжні піднесучі, які можуть забезпечити, щоб єдиному UE призначалися всі з суміжних піднесучих в секції даних. UE можуть бути призначені блоки ресурсів у секції керування для передачі інформації керування на eNB. UE також можуть бути призначені блоки ресурсів у секції даних для передачі даних на eNB. UE може передавати інформацію керування по фізичному каналу 210 керування висхідною лінією зв'язку (PUCCH) в призначених блоках ресурсів у секції керування. UE може передавати тільки дані або як дані, так і інформацію керування по фізичному каналу 220 висхідної лінії зв'язку (PUSCH), що спільно використовується, в призначених блоках ресурсів у секції даних. Передача висхідної лінії зв'язку може охоплювати обидва слоти підкадру і може здійснювати стрибки за частотою, як показано на Фіг. 2А. UE може знаходитися в межах охоплення множинних вузлів eNB. Один з цих вузлів eNB може бути вибраний для обслуговування UE. Обслуговуючий eNB може бути вибраний на основі різних критеріїв, таких як прийнята потужність, втрати на трасі, відношення сигналу до шуму (SNR) тощо. UE може працювати в сценарії домінуючих перешкод, в яких UE може спостерігати сильні перешкоди від одного або більше утворюючих перешкоди вузлів eNB. Сценарій домінуючих 5 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 перешкод може мати місце через обмежену асоціацію. Наприклад, на Фіг. 1 UE 120y може знаходитися близько до фемто eNB 110y і може мати високу прийняту потужність для eNB 110y. Однак, UE 120y може не бути здатним одержати доступ до фемто eNB 110y через обмежену асоціацію і може потім з'єднуватися з макро eNB 110с з більш низькою прийнятою потужністю (як показано на Фіг. 1) або з фемто eNB 110z також з більш низькою прийнятою потужністю (не показано на Фіг. 1). UE 120y може потім спостерігати сильні перешкоди від фемто eNB 110y по низхідній лінії зв'язку і може також спричиняти сильні перешкоди для eNB 110y по висхідній лінії зв'язку. Сценарій домінуючих перешкод може також мати місце через розширення діапазону, який є сценарієм, в якому UE з'єднується з eNB з більш низькими втратами на трасі і більш низьким SNR серед усіх вузлів eNB, виявлених за допомогою UE. Наприклад, на Фіг. 1 UE 120x може виявити макро eNB 110b і піко eNB 110x і може мати більш низьку прийняту потужність для eNB 110x, ніж eNB 110b. Проте, може бути бажано для UE 120x з'єднуватися з піко eNB 110x, якщо втрати на трасі для eNB 110x нижче, ніж втрати на трасі для макро eNB 110b. Це може призвести до менших перешкод для бездротової мережі із заданою швидкістю передачі даних для UE 120x. В одному аспекті зв'язок в сценарії домінуючих перешкод може підтримуватися за наявності різних вузлів eNB, які працюють на різних діапазонах частот. Діапазоном частот є діапазон частот, який може бути використаний для зв'язку і може бути заданий (і) центральною частотою і смугою частот або (іі) нижньою частотою і верхньою частотою. Діапазон частот може також називатися частотним діапазоном, частотним каналом тощо. Діапазони частот для різних вузлів eNB можуть бути вибрані таким чином, щоб UE могло зв'язатися з більш слабким eNB в сценарії домінуючих перешкод, в той самий час дозволяючи сильному eNB зв'язуватися зі своїми обладнаннями UE. eNB може бути класифікований на «слабкий» eNB або «сильний» eNB на основі прийнятої потужності сигналів від eNB, прийнятих в UE (і не на основі рівня потужності передачі eNB). Фіг. 3 є блок-схемою структури базової станції або eNB 110 та UE 120, яке може бути одним з базових станцій/вузлів eNB і одним з обладнань UE на Фіг. 1. Для сценарію обмеженої асоціації eNB 110 може бути макро eNB 110с на Фіг. 1, і UE 120 може бути UE 120y. eNB 110 може також бути базовою станцією деякого іншого типу. eNB 110 може бути обладнаний T антенами 334a-334t, і UE 120 може бути обладнаний R антенами 352а-352r, де звичайно Т>1 та R>1. У eNB 110 процесор 320 передачі може приймати дані від джерела 312 даних та інформацію керування від контролера/процесора 340. Інформація керування може призначатися для PBCH, PCFICH, PHICH, PDCCH тощо. Дані можуть призначатися для PDSCH тощо. Процесор 320 передачі може обробляти (наприклад, кодувати і відображати в символ) дані та інформацію керування, щоб одержати символи даних і символи керування, відповідно. Процесор 320 передачі може також генерувати опорні символи, наприклад, для PSS, SSS і специфічного для стільники опорного сигналу. Процесор 330 з множинними входами і множинними виходами (MIMO) (TX) передачі даних може виконувати просторову обробку (наприклад, попереднє кодування) відносно символів даних, символів керування і/або опорних символів, якщо застосовно, і може видавати T символьних потоків виводу в T модуляторів 332a-332t (модуляторів MOD). Кожний модулятор 332 може обробляти відповідний вихідний символьний потік (наприклад, для OFDM тощо), щоб одержати вихідний потік вибірок. Кожний модулятор 332 може додатково обробляти (наприклад, перетворити в аналогову форму, посилювати, фільтрувати і перетворити з підвищенням частоти) вихідний потік вибірок, щоб одержати сигнал низхідної лінії зв'язку. T сигналів низхідної лінії зв'язку від модуляторів 332a-332t можуть бути передані за допомогою T антен 334a-334t, відповідно. У UE 120 антени 352а-352r можуть приймати сигнали низхідної лінії зв'язку від eNB 110 і можуть видавати прийняті сигнали в демодулятори 354а-354r (демодулятори DEMOD), відповідно. Кожний демодулятор 354 може приводити до необхідних умов (наприклад, фільтрувати, посилювати, перетворити зі зниженням частоти і переводити в цифрову форму) відповідний прийнятий сигнал, щоб одержати вибірки введення. Кожний демодулятор 354 може додатково обробляти вхідні вибірки (наприклад, для OFDM тощо), щоб одержати прийняті символи. Блок 356 виявлення MIMO може одержати прийняті символи від всіх R демодуляторів 354а-354r, щоб виконати виявлення MIMO відносно прийнятих символів, якщо застосовно, і видати виявлені символи. Процесор 358 прийому може обробляти (наприклад, демодулювати, виконувати обернене перемежовування і декодувати) виявлені символи, видавати декодовані дані для UE 120 в сховище 360 даних і видавати декодовану інформацію керування в контролер/процесор 380. 6 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 По висхідній лінії зв'язку в UE 120 процесор 364 передачі може приймати та обробляти дані (наприклад, для PUSCH) від джерела 362 даних та інформацію керування (наприклад, для PUCCH) від контролера/процесора 380. Процесор 364 передачі може також генерувати опорні символи для опорного сигналу. Символи від процесора 364 передачі можуть бути заздалегідь закодовані процесором 366 MIMO TX, якщо застосовно, додатково оброблені модуляторами 354а-354r (наприклад, для SC-FDM тощо) і передані на eNB 110. У eNB 110 сигнали висхідної лінії зв'язку від UE 120 можуть бути прийняті антенами 334, оброблені демодуляторами 332, виявлені блоком 336 виявлення MIMO, якщо застосовно, і додатково оброблені процесором 338 прийому, щоб одержати декодовані дані та інформацію керування, послані за допомогою UE 120. Процесор 338 прийому може видавати декодовані дані в сховище 339 даних і декодовану інформацію керування в контролер/процесор 340. Контролери/процесори 340 та 380 можуть керувати роботою в eNB 110 та UE 120, відповідно. Контролер/процесор 380 і/або інші процесори і модулі в UE 120 можуть виконувати або безпосередні операції для блоків 800 на Фіг. 8 і/або інші процеси для способів, описаних в даному описі. Контролер/процесор 340 і/або інші процесори і модулі в eNB 110 можуть виконувати або безпосередні операції для блоків 900 на Фіг. 9 і/або інші процеси для способів, описаних в даному описі. Блоки 342, 382 пам'яті можуть зберігати дані та програмні коди для eNB 110 та UE 120, відповідно. Планувальник 344 може планувати обладнання UE для передачі даних по низхідній лінії зв'язку і/або висхідній лінії зв'язку. Зразкове розділення ресурсів Згідно з деякими аспектами даного опису, коли мережа підтримує розширене координування перешкод між стільниками (elСІС), базові станції можуть узгоджуватися одна з одною, щоб скоординувати ресурси для зменшення/усунення перешкод за допомогою утворюючого перешкоди стільника, в той самий час виділяючи частину своїх ресурсів. Відповідно до цього координування перешкод UE може бути здатне одержати доступ до обслуговуючого стільника навіть з серйозними перешкодами за допомогою використання ресурсів, забезпечених стільником, що утворює перешкоди. Наприклад, фемтостільник з режимом закритого доступу (тобто, в якому тільки фемто UEчлен може одержати доступ до стільника) в зоні охоплення відкритого макростільника може бути здатний утворювати «отвір охоплення» для макростільника. За допомогою узгодження для фемтостільника, щоб забезпечити деякі з його ресурсів, ефективне видалення перешкод, макро UE в зоні охоплення фемтостільника все ще може бути здатний одержати доступ до обслуговуючого UE макростільника, використовуючи ці забезпечені ресурси. У системі радіодоступу, що використовує OFDM, такій як вдосконалена універсальна мережа наземного радіодоступу (E-UTRAN), ці забезпечені ресурси можуть бути основані на часі, основані на частоті або їх комбінації. Коли скоординоване розділення ресурсів основане на часі, утворюючий перешкоди стільник може просто не використовувати деякі з підкадрів у часовій ділянці. Коли забезпечені ресурси (тобто, скоординоване розділення ресурсів) основані на частоті, утворюючий перешкоди стільник може видавати піднесучі в частотній ділянці. Коли скоординоване розділення ресурсів є комбінацією як частоти, так і часу, утворюючий перешкоди стільник може забезпечити деякі ресурси частоти і часу. Фіг. 4 ілюструє зразковий сценарій, де elСІС може дозволити макро UE 120y, підтримуючому elСІС (наприклад, макро UE ReI-10, як показано на Фіг. 4), одержати доступ до макростільника 110с, навіть коли макро UE 120y відчуває серйозні перешкоди від фемтостільника 110y, як ілюстровано суцільною лінією 402 радіозв'язку. Успадковане макро UE 120u (наприклад, макро UE ReI-8, як показано на Фіг. 4) може не бути здатне одержати доступ до макростільника 110c під дією серйозних перешкод від фемтостільника 110y, як ілюстровано розірваною лінією радіозв'язку 404. Фемто UE 120v (наприклад, фемто UE Rel-8, як показано на Фіг. 4) може одержати доступ до фемтостільника 110y без яких-небудь проблем з перешкодами від макростільника 110c. Згідно з деякими аспектами мережі можуть підтримувати elСІС, де можуть бути різні набори інформації розділення. Перший з цих наборів може називатися інформацією напівстатичного розділення ресурсів (SRPI). Другий з цих наборів може називатися інформацією адаптивного розділення ресурсів (ARPI). Як видно з назви, SRPI звичайно часто не змінюється, і SRPI може бути послана на UE таким чином, щоб UE могло використовувати інформацію розділення ресурсів для власних операцій UE. Як приклад розділення ресурсів може бути реалізоване з періодичністю 8 мілісекунд (8 підкадрів) або періодичністю 40 мілісекунд (40 підкадрів). Згідно з деякими аспектами можна передбачити, що дуплексна передача з частотним розділенням (FDD) також може застосовуватися таким чином, щоб могли також бути розділені ресурси частоти. Для зв'язку за 7 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 допомогою низхідної лінії зв'язку (наприклад, від вузла В стільника до UE) шаблон розділення може бути відображений у відомий підкадр (наприклад, перший підкадр кожного радіокадру, який має значення номера системного кадру (SFN), яке є кратним числом цілого числа N, наприклад, 4). Таке відображення може бути застосоване, щоб визначити інформацію розділення ресурсів (RPI) для конкретного підкадру. Як приклад підкадр, який піддається скоординованому розділенню ресурсів (наприклад, забезпечений стільником, що утворює перешкоди) для низхідної лінії зв'язку, може бути ідентифікований індексом: IndexSRPI-DL=(SFN * 10 + номер підкадра) mod 8 Для висхідної лінії зв'язку відображення SRPI може бути зміщене, наприклад, на 4 мілісекунди. Таким чином, приклад для висхідної лінії зв'язку може бути: IndexSRPL-UL=(SFN * 10+ номер підкадру 4) mod 8 SRPI може використовувати наступні три значення для кожного запису: - U (Використання): це значення вказує, що підкадр був очищений від домінуючих перешкод, щоб бути використаним цим стільником (тобто, основні утворюючі перешкоди стільники не використовують цей підкадр); - N (Не використання): це значення вказує, що підкадр не повинен бути використаний; і - X (Невідомий): це значення вказує, що підкадр статично не розділений. Подробиці узгодження використання ресурсів між базовими станціями не відомі для UE. Інший можливий набір параметрів для SRPI може бути наступним: - U (Використання): це значення вказує, що підкадр був очищений від домінуючих перешкод, щоб бути використаним цим стільником (тобто, основні утворюючі перешкоди стільники не використовують цей підкадр); - N (Без використання): це значення вказує, що підкадр не повинен бути використаний; - X (Невідомий): це значення вказує, що підкадр статично не розділений (і подробиці узгодження використання ресурсів між базовими станціями не відомі для UE); і - C (Звичайний): це значення може вказувати, що всі стільники можуть використовувати цей підкадр без розділення ресурсів. Цей підкадр може бути підданий перешкодам таким чином, щоб базова станція могла захотіти використати цей підкадр тільки для UE, яке не відчуває серйозних перешкод. SRPI обслуговуючого стільника може бути передана через повітря. У E-UTRAN SRPI обслуговуючого стільника може бути послана в основному блоці інформації (МІВ) або одному з блоків системної інформації (блоків SIB). Заздалегідь визначена SRPI може бути визначена на основі характеристик стільників, наприклад, макростільника, пікостільника (з відкритим доступом) і фемтостільника (із закритим доступом). У такому випадку кодування SRPI в повідомленні службових витрат системи може призвести до більш ефективного мовлення через повітря. Базова станція може також віщати SRPI сусіднього стільника в одному з блоків SIB. Для цього SRPI може бути послана зі своїм відповідним діапазоном ідентифікаторів фізичного стільника (ідентифікаторів PCI). ARPI може представляти додаткову інформацію розділення ресурсів з докладною інформацією для 'X' підкадрів в SRPI. Як відмічено вище, докладна інформація для 'X' підкадрів звичайно відома тільки базовим станціям, і UE не знає про це. Фіг. 5 та 6 ілюструють приклади призначення SRPI, як описано вище в сценарії з макро- і фемтостільниками. Зразкові вимірювання RRM UE HetNet Підкадр U є підкадром, який може бути очищений від домінуючих перешкод. Інформація підкадру U може бути доставлена в UE. Вимірювання керування радіоресурсами (RRM) можуть здійснюватися тільки по підкадрах U через перешкоди видалених даних. Вимірювання RRM можуть містити прийняту потужність опорного сигналу (RSRP) і прийняту якість опорного сигналу (RSRQ). RSRP може вказувати прийняту потужність відносно виділеного для стільника опорного сигналу (CRS), і RSRQ може вказувати прийняту якість по CRS. RSRQ може бути обчислено таким чином: RSRQ=N*RSRP/RSSI, де RSSI є індикатором рівня прийнятого сигналу. RSSI може значно змінюватися в різних підкадрах через розділення ресурсів. CRS може бути переданий у всьому не мультимедійному мовленні по підкадрах мережі з єдиною частотою (MBSFN); тому може не бути потреби знати чергування. Координація перешкод накладення CRS може додатково підвищити продуктивність. RSRQ може бути перевизначений для UE Випуску 10 LTE (ReI-10): RSRQ=N*RSRP/(RSSIU-subframes-RSRPortogonalized-interfering-cell) Це може вказати істинну продуктивність підкадру U. 8 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 Вимірювання RRM від обслуговуючого/базуючого стільника можуть бути виконані, оскільки інформація розділення ресурсів (RPI) може бути зроблена доступною від обслуговуючого стільника. Тому, які підкадри виміряти (тобто, підкадри U), може бути визначено на основі RPI. RPI не може бути відома для не обслуговуючого/базуючого стільника. Деякі аспекти даного опису розкривають способи для визначення, які підкадри включити у вимірювання радіоресурсів на основі RPI для стільників. Деякі аспекти, розглянуті в даному описі, можуть стосуватися з'єднаного режиму або режиму очікування, міжчастотних структур або внутрішньочастотних структур, і обслуговуючих стільників або сусідніх стільників. Для деяких аспектів список сусідів від обслуговуючого стільника може переносити RPI не обслуговуючого стільника в блоці системної інформації (SIB). Цей аспект може застосовуватися у випадку макро-піко стільника, де кількість пікостільників може бути обмежена (тобто, відображення ідентифікатора фізичного стільника (PCI)-в-RPI). Стільником CSG (наприклад, фемтостільником) можуть бути розподілені один або два шаблони, але може не бути явного відображення РСІ-в-RPI. Для деяких аспектів RPI може бути одним і тим самим для одних і тих самих типів стільників (наприклад, макро-, піко- або фемтостільників). Для деяких аспектів UE може одержати (вивести) RPI не обслуговуючого стільника на основі RPI обслуговуючого стільника. Для деяких аспектів RPI обслуговуючого стільника і не обслуговуючого стільника може бути однією і тією самою, таким чином, UE може розглядати RPI для не обслуговуючого стільника, яка повинна бути такою самою як RPI для обслуговуючого стільника, як частина виводу RPI не обслуговуючого стільника. Іншими словами, UE може використовувати підкадр U обслуговуючого стільника для вимірювань не обслуговуючого стільника. Для деяких аспектів RPI не обслуговуючого стільника може підходити RPI обслуговуючого стільника. Іншими словами, UE може використовувати підкадр N обслуговуючого стільника для вимірювань не обслуговуючого стільника (наприклад, не обслуговуючий стільник може бути відмінним класом від обслуговуючого стільника). Для деяких аспектів UE може об'єднати множинні вимірювання по підкадрах U та N для фінального представлення звіту (наприклад, представлення звіту про множинну RSRQ та RSRP - одне від підкадра U і інше від підкадра N). З цих множинних вимірювань може бути вибране найкраще RSRQ. Для деяких аспектів UE може виконати сліпе виявлення на основі виконання вимірювань RRM по всіх підкадрах. UE може бути здатне виявити шаблони за допомогою визначення, від яких підкадрів UE може бути здатне зробити хороші і погані вимірювання, при цьому шаблони розділення можуть додатково дозволити UE визначити підкадри (наприклад, підкадри U), щоб включити у вимірювання RRM. Для деяких аспектів UE може визначити, які підкадри виміряти за допомогою зчитування типу 1 блока системної інформації (SIBl) від «агресора» (наприклад, сусіднього стільника). Цей аспект може застосовуватися в сценарії фемтостільника, де UE може зчитувати SIBl від CSG для визначення, чи може UE підписатися. UE, базоване в макростільнику, може включатися відповідно до CSG, де UE може зчитувати SIBl від CSG для визначення підкадру N (тобто, RPI макростільники, передбачаючи комплементарність RPI від фемтостільника). Для деяких аспектів RPI для не обслуговуючого стільника може переноситися в основному блоці інформації (МІВ), який може дозволити процедуру більш швидкого вимірювання. Для деяких аспектів чотири конфігурації можуть використовувати 2 біти в МІВ, при цьому шаблон RPI може бути оснований на типі стільника. Для деяких аспектів може бути введене додаткове розділення PCI для пікостільників, в яких це додаткове розділення може бути жорстко закодоване в просторах PCI-в-RPI. Розділення простору PCI може бути передане, використовуючи канал синхронізації. Для міжчастотного виконання або виконання між-технології радіодоступу (RAT), якщо міжрівнева синхронізація і RPI доступні, список сусідів від обслуговуючого стільника може переносити RPI не обслуговуючого стільника, як в деяких аспектах, описаних вище. Використовуваний для вимірювання стільника для міжчастотної або між-RAT передачі обслуговування проміжок поточного вимірювання (6 мілісекунд в LTE), однак, може не бути суміщений із основаним на чергуванні напівстатичним розділенням (тобто, RPI). Проміжок в 6 мілісекунд з періодичністю 40 мілісекунд може безперервно пропускати чергування U. Проміжок в 6 мілісекунд може не захопити фізичний канал мовлення (PBCH); тому, може не бути інформації номера системного кадру (SFN). RPI крос-частоти може не бути доступною або можливою для асинхронних мереж. Для деяких аспектів проміжок вимірювання може бути збільшений коефіцієнтом від двох до приблизно 11 мілісекунд (безперервний) плюс корисні дані МІВ. Для деяких аспектів проміжок вимірювання триває щонайменше 10 мілісекунд. Це може бути достатнім, щоб захопити МІВ в 9 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 кожному проміжку вимірювання. Додатково, щонайменше одне чергування U може бути захоплене під час кожного проміжку вимірювання. Для деяких аспектів RPI може переноситися в МІВ. Для деяких аспектів може бути зміщений проміжок вимірювання, і може мати місце автономне зчитування системної інформації (SI). Спочатку UE може виміряти PCI і представити звіт обслуговуючому стільнику. Обслуговуючий стільник може запитати UE виконати автономне зчитування SI (тобто, МІВ або SIB). UE може спочатку зчитувати найсильніший стільник, потім «розширити» процес, щоб виміряти інші стільники. Більш конкретно, UE може рахувати МІВ або SIB найсильнішого стільника(ів), щоб дізнатися RPI більш слабких стільників. Потім UE захоплює і вимірює слабкі стільники на основі інформації (включаючи RPI), захопленого від найсильнішого стільника(ів). Таким способом UE може завантажити, тобто, одержати або визначити ймовірний план для вимірювання більш слабких стільників, використовуючи інформацію від найсильнішого стільника(ів). Без використання інформації від найсильнішого стільника(ів) UE ймовірно не може бути здатним виміряти слабкі стільники відразу. UE може також безпосередньо рахувати SIB слабких стільників, якщо достатня інформація видана в МІВ. Базова станція (наприклад, eNB) може вирішити, чи виконувати зчитування SI або не основане на розгортанні знання (наприклад, сусід, частотний діапазон, підписка UE, місцеположення тощо). UE може використовувати більш довгий проміжок вимірювання для зчитування SI і генерувати SFN і інформацію RPI для всіх стільників, що цікавлять. UE може представити звіт про цю інформацію і запитати проміжок вимірювання, який повинен бути зміщений для збігу з підкадром U деяких стільників. Базова станція може конфігурувати UE в зміщених на 6 мілісекундних проміжках. Для деяких аспектів множинні проміжки можуть бути використані, щоб захопити всі стільники, оскільки U підкадри можуть бути незв'язними. Для деяких аспектів підкадри U можуть бути обмежені щонайменше двома чергуваннями для кожного 8 мілісекундного періоду розділення ресурсів (наприклад, щонайменше один підкадр U кожні 4 мілісекунди, або щонайменше два підкадри U кожні 8 мілісекунд). Це може гарантувати щонайменше одне хороше вимірювання (тобто, вимірювання із зменшеними/усуненими перешкодами) в кожному 6 мілісекундному проміжку вимірювання. UE може вибрати найкраще RSRQ для представлення звіту. Однак в цьому випадку може бути втрата ступеня деталізування. Наприклад, Фіг. 7 ілюструє зразкове розділення ресурсів з трьома підкадрами U (тобто, більше ніж 2 підкадри U) в кожному періоді SRPI з 8 мілісекунд. Таким способом незалежно від того, де має місце проміжок 702 вимірювання для того, щоб зробити міжчастотні або між-RAT вимірювання, буде мати місце щонайменше одне хороше вимірювання (тобто, вимірювання, зроблене в підкадрі U без серйозних перешкод) в проміжку вимірювання. Протягом проміжку 702 вимірювання зв'язок з обслуговуючим стільником тимчасово припиняється, як показано, так, що UE може виміряти інший не обслуговуючий стільник для міжчастотної або між-RAT передачі обслуговування. Крім того, обслуговуючий стільник не зв'язується з UE протягом проміжку 702 вимірювання. Для деяких аспектів UE може бути сконфігурований для використання автономного проміжку вимірювання для вимірювань. Автономний проміжок вимірювання, що використовується в даному описі, в цілому стосується проміжку вимірювання, що запитується за допомогою UE і надається за допомогою E-UTRAN. Автономний проміжок вимірювання може бути розподілений за допомогою eNB тільки протягом деяких періодів, щоб уникнути впливу на швидкість передачі даних і пропускну здатність UE, наприклад, періоду, в якому якість каналу обслуговуючого стільника є низькою, або в періоді, в якому UE менш ймовірно повинне бути заплановане для передачі даних. UE може бути обмежене загальним часом очікування і загальною кількістю втрат підкадрів. Однак UE може використовувати більш довгі проміжки, щоб захопити деякі підкадри U. Фіг. 8 є функціональною блок-схемою, яка концептуально ілюструє зразкові етапи 800, здійснювані для виконання вимірювання радіоресурсів для підкадрів, відповідно до деяких аспектів даного опису. Етапи 800 можуть бути виконані, наприклад, за допомогою UE 120. На етапі 802 UE може приймати передачі в підкадрах від стільників (наприклад, обслуговуючого стільника і/або однієї або більше не обслуговуючих стільників). На етапі 804 UE може визначити підкадри для включення у вимірювання радіоресурсів. Визначення робиться на основі інформації розділення ресурсів (RPI) для стільників. Наприклад, вимірювання може бути обмежене тільки захищеними підкадрами (тобто, чистими підкадрами, такими як підкадри U). Для деяких аспектів RPI може бути визначена на основі RPI, прийнятої від обслуговуючого стільника, як для обслуговуючого стільника, так і для одного або більше не обслуговуючих стільників. Для інших аспектів RPI для не обслуговуючих стільників може бути 10 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 одержана з RPI, прийнятої від обслуговування тільки обслуговуючого стільника. Для ще інших аспектів RPI може бути визначена на основі RPI, прийнятої від одного або більше не обслуговуючих стільників для цих не обслуговуючих самих стільників. На етапі 806 UE може виконати вимірювання радіоресурсів для визначених підкадрів. Вимірювання радіоресурсів може містити вимірювання RRM. Для деяких аспектів вимірювання радіоресурсів може містити міжчастотне або між-RAT вимірювання радіоресурсів. Для таких аспектів міжчастотне/між-RAT вимірювання радіоресурсів може бути виконане протягом проміжку вимірювання, що має тривалість довшу, ніж звичайні 6 мілісекунд, наприклад, щонайменше 10 мілісекунд. Альтернативно, міжчастотне/між-RAT вимірювання радіоресурсів може бути виконане протягом множинних проміжків вимірювання (наприклад, де кожний проміжок вимірювання має тривалість приблизно 6 мілісекунд). На етапі 808 UE може представляти звіт про вимірювання для деяких аспектів. Це повідомлення звичайно залучає передачу індикації результату вимірювання радіоресурсів на обслуговуючу базову станцію. Повідомлення може бути зроблене тільки при виконанні вимірювання RRM в з'єднаному режимі. Вимірювання RRM в режимі очікування використовується для повторного вибору стільника (тобто, визначаючи найкращий стільник для асоціації з (ним) для служби мережі). Операції, описані вище, можуть бути виконані будь-якими прийнятними компонентами або іншим засобом, здатним виконувати відповідні функції згідно з Фіг. 8. Наприклад, етапи 800, ілюстровані на Фіг. 8, відповідають компонентам 800А, ілюстрованим на Фіг. 8А. На Фіг. 8А приймач-передавач 802А може приймати передачі в підкадрах від одного або більше стільників, такі як eNB1 та eNB2. Блок 804А визначення підкадра може визначити підкадри для включення у вимірювання радіоресурсів на основі RPI 805 для стільників. RPI 805 може бути визначена з прийнятих підкадрів. Блок 806А вимірювання радіоресурсів може виконати вимірювання радіоресурсів для підкадрів, як визначено блоком 804А визначення підкадру. Блок вимірювання радіоресурсів може потім представити звіт про вимірювання радіоресурсів за допомогою приймач-передавача 802А. Фіг. 9 є функціональною блок-схемою, яка концептуально ілюструє зразкові етапи 900, здійснені для генерування RPI в першій базовій станції таким чином, щоб щонайменше один підкадр, позначений для вимірювання радіоресурсів, потрапляв у межі проміжку вимірювання, асоційованого з другою базовою станцією. Етапи 900 можуть бути виконані, наприклад, за допомогою eNB 110 як першої базової станції з іншою частотою або використовує іншу технологію радіодоступу (RAT). Перша і друга базові станції також можуть бути різними типами. На етапі 902 перша базова станція може визначити проміжок вимірювання, асоційований з другою базовою станцією, для міжчастотного або між-RAT вимірювання радіоресурсів. Для деяких аспектів етап визначення проміжку вимірювання містить прийом індикації проміжку вимірювання за допомогою зворотного з'єднання між першою і другою базовими станціями. На етапі 904 перша базова станція може генерувати RPI з щонайменше одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції. Перша базова станція може генерувати RPI за допомогою визначення деяких ресурсів часу і/або частоти, щоб використовувати для зв'язку з одним або більше обладнаннями UE, що обслуговуються першою базовою станцією. RPI генерується таким чином, щоб щонайменше один підкадр, позначений для вимірювань радіоресурсів, асоційованих з першою базовою станцією, знаходився в межах проміжку вимірювання, асоційованого з другою базовою станцією, як описано вище. Для деяких аспектів перша базова станція може узгодити RPI з однією або більше іншими станціями за допомогою зворотного з'єднання, наприклад. Для інших аспектів перша базова станція може одержати RPI, щоб використовувати на основі RPI іншої сусідньої базової станції, прийнятої за допомогою зворотного з'єднання, наприклад. На етапі 906 перша базова станція може передавати підкадри згідно зі згенерованою RPI. Ці підкадри включають в себе щонайменше один підкадр, позначений для вимірювань радіоресурсів, асоційованих з першою базовою станцією, яка потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією. Для деяких аспектів перша базова станція використовує іншу RAT, ніж друга базова станція. Для деяких аспектів перша базова станція використовує відмінну частоту, ніж друга базова станція. Для деяких аспектів щонайменше один підкадр містить більше, ніж два підкадри. Для деяких аспектів індикація проміжку вимірювання може бути прийнята першою базовою станцією за допомогою зворотного з'єднання між першою і другою базовими станціями. Операції, описані вище, можуть бути виконані будь-якими прийнятними компонентами або іншим засобом, здатним виконати відповідні функції Фіг. 9. Наприклад, етапи 900, ілюстровані на Фіг. 9, відповідають компонентам 900А, ілюстрованим на Фіг. 9А. На Фіг. 9А блок 902А 11 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 визначення проміжку вимірювання в першому eNB 110 може визначити проміжок вимірювання, асоційований з другим eNB 110. Блок 904А генерування RPI може генерувати RPI з підкадрами, позначеними для вимірювань радіоресурсів таким чином, щоб підкадри, що визначаються, знаходилися в межах проміжку вимірювання. Приймач-передавач 906 А може передавати підкадри згідно з RPI від блока 904А генерування RPI. Різні операції способів, описаних вище, можуть бути виконані будь-яким прийнятним засобом, здатним виконати відповідні функції. Засіб може включати в себе різний компонент(и) і/або модуль (і)апаратного забезпечення і/або програмного забезпечення, що включає в себе, але не обмежений цим, схему, спеціалізовану інтегральну схему (ASIC) або процесор. Наприклад, засіб для передачі або засіб для посилання можуть містити передавач, модулятор 354 і/або антену 352 як у UE 120, зображеного на Фіг. 3, або передавач, модулятор 332 і/або антену 334 як у eNB 110, показаного на Фіг. 3. Засіб для прийому може містити приймач, демодулятор 354 і/або антену 352 як у UE 120, зображеного на Фіг. З, або приймач, демодулятор 332 і/або антену 334 як у eNB 110, показаного на Фіг. 3. Засіб для обробки, засіб для визначення, засіб для виконання, засіб для представлення звіту і/або засіб для генерування можуть містити систему обробки, яка може включати в себе щонайменше один процесор, такий як процесор 320 передачі або контролер/процесор 340 у eNB 110, або процесор 358 прийому або контролер/процесор 380 у UE 120, ілюстрованого на Фіг. 3. Фахівці в даній галузі техніки зрозуміють, що інформація і сигнали можуть бути забезпечені, використовуючи будь-яку множину різних технологій та способів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи та елементи сигналу, на які можна посилатися протягом даного опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будьякою їх комбінацією. Фахівці в даній галузі техніки додатково оцінять, що різні ілюстративні логічні блоки, модулі, схеми та етапи алгоритму, описані спільно з розкриттям в даному описі, можуть бути реалізовані як електронне апаратне забезпечення, програмне забезпечення або їх комбінація. Щоб зрозуміло ілюструвати цю взаємозамінність апаратного забезпечення і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми та етапи були описані вище в цілому відносно їх функціональних можливостей. Чи реалізовані такі функціональні можливості як апаратне забезпечення або програмне забезпечення залежить від конкретного додатку і структурних обмежень, накладених на повну систему. Фахівці в даній галузі техніки можуть реалізувати описані функціональні можливості різними способами для кожного конкретного додатку, але такі рішення реалізації не повинні інтерпретуватися як породження відхилення від обсягу даного опису. Різні ілюстративні логічні блоки, модулі та схеми, описані спільно з розкриттям в даному описі, можуть бути реалізовані або виконані процесором загального призначення, цифровим сигнальним процесором (DSP), спеціалізованою інтегральною схемою (ASIC), програмованою користувачем вентильною матрицею (FPGA) або іншим програмованим логічним пристроєм, дискретною логікою на логічних елементах або транзисторах, дискретними компонентами апаратного забезпечення або будь-якою їх комбінацією, сконструйованою для виконання функцій, описаних в даному описі. Процесор загального призначення може бути мікропроцесором, але в альтернативі, процесор може бути будь-яким звичайним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор також може бути реалізований як комбінація обчислювальних пристроїв, наприклад, комбінація DSP і мікропроцесора, множини мікропроцесорів, одного або більше мікропроцесорів в з'єднанні з ядром DSP або будь-яка інша така конфігурація. Етапи способу або алгоритму, описаного спільно з розкриттям в даному описі, можуть безпосередньо здійснюватися в апаратному забезпеченні, в модулі програмного забезпечення, що виконується процесором, або їх комбінації. Модуль програмного забезпечення може постійно знаходитися в пам'яті RAM, флеш-пам'яті, пам'яті ROM, пам'яті EPROM, пам'яті EEPROM, регістрах, жорсткому диску, змінному диску, CD-ROM або будь-якій іншій формі запам'ятовуючого носія, відомого в даній галузі техніки. Зразковий запам'ятовуючий носій з'єднаний з процесором таким чином, щоб процесор міг зчитувати інформацію і записувати інформацію на запам'ятовуючий носій. В альтернативі, запам'ятовуючий носій може бути невід'ємною частиною процесора. Процесор і запам'ятовуючий носій можуть постійно знаходитися в ASIC. ASIC може постійно знаходитися в користувацькому терміналі. В альтернативі, процесор і запам'ятовуючий носій можуть постійно знаходитися як дискретні компоненти в користувацькому терміналі. 12 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 В одній або більше зразкових структурах описані функції можуть бути реалізовані в апаратному забезпеченні, програмному забезпеченні, програмно-апаратному забезпеченні або будь-якій їх комбінації. Якщо реалізовано в програмному забезпеченні, функції можуть бути збережені або передані як одна або більше команд або код за допомогою зчитуваного комп'ютером носія. Зчитувані комп'ютером носії включають в себе як комп'ютерні запам'ятовуючі носії, так і комунікаційні носії, що включають в себе будь-який носій, який полегшує передачу комп'ютерної програми від одного місця до іншого. Запам'ятовуючі носії можуть бути будь-якими доступними носіями, до яких може одержати доступ комп'ютер загального призначення або спеціального призначення. За допомогою прикладу, а не обмеження, такі зчитувані комп'ютером носії можуть містити RAM, ROM, EEPROM, CD-ROM або інший запам'ятовуючий пристрій на оптичних дисках, запам'ятовуючий пристрій на магнітних дисках або інші магнітні запам'ятовуючі пристрої, або будь-який інший носій, який може бути використаний, щоб переносити або зберігати бажаний програмний код в формі команд або структур даних, і який може бути доступним за допомогою комп'ютера загального призначення або спеціального призначення. Крім того, будь-яке з'єднання належно називається зчитуваним комп'ютером носієм. Наприклад, якщо програмне забезпечення передається від веб-сайту, сервера або іншого віддаленого джерела, використовуючи коаксіальний кабель, волоконнооптичний кабель, виту пару, абонентську цифрову лінію (DSL) або бездротові технології, такі як інфрачервоне випромінювання, радіо і мікрохвилі, то цей коаксіальний кабель, волоконнооптичний кабель, вита пара, DSL або бездротові технології, такі як інфрачервоне випромінювання, радіо і мікрохвилі включаються у визначення носія. Диск (disk) і диск (disc), як використовуються в даному описі, включають в себе компакт-диск (CD), лазерний диск, оптичний диск, універсальний цифровий диск (DVD), дискету і диск blue-ray, де диски (disks) звичайно відтворюють дані магнітним способом, в той час як диски (discs) відтворюють дані оптичним чином за допомогою лазерів. Комбінації вищезазначеного повинні бути також включені в поняття зчитуваних комп'ютером носіїв. Попередній опис даного розкриття наданий, щоб дозволити будь-якому фахівцеві в даній галузі техніки зробити або використати розкриття. Різні модифікації до цього розкриття будуть очевидні для фахівців у даній галузі техніки, і загальні принципи, визначені в даному описі, можуть застосовуватися до інших змін, не відступаючи від суті або обсягу розкриття. Таким чином, дане розкриття не призначене, щоб обмежуватися прикладами і структурами, описаними в даному описі, але повинне одержати найширше охоплення, сумісне з принципами і новими ознаками, розкритими в даному описі. Посилальні позиції 100 мережа бездротового зв'язку 102 стільники 110 вузли В 120 користувацьке обладнання 130 контролер 210 фізичний канал керування висхідною лінією зв'язку (PUCCH) 220 фізичний канал висхідної лінії зв'язку (PUSCH), що спільно використовується 312 джерело даних 330, 366 процесор MIMO TX передачі даних 332 модулятори 334 передавальні антени 340, 380 контролер/процесор 344 планувальник 352 приймальні антени 354 демодулятори 356 блок виявлення MIMO 338, 358 процесор прийому 360, 339 сховище даних 362 джерело даних 364 процесор передачі 342, 382 блок пам'яті 55 ФОРМУЛА ВИНАХОДУ 1. Спосіб для бездротового зв'язку, який містить: прийом передач від множини стільників, причому передачі включають в себе множину підкадрів; 13 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і виконання вимірювання радіоресурсів згаданого визначеного набору підкадрів. 2. Спосіб за п. 1, який додатково містить представлення звіту про вимірювання. 3. Спосіб за п. 1, в якому визначення містить прийом від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників. 4. Спосіб за п. 3, в якому список сусідів від обслуговуючого стільника переносить RPI в блоці системної інформації (SIB). 5. Спосіб за п. 1, в якому визначення містить: прийом від обслуговуючого стільника згаданої RPI для обслуговуючого стільника; і одержання згаданої RPI для одного або більше обслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника. 6. Спосіб за п. 5, в якому етап одержання містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника. 7. Спосіб за п. 5, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів. 8. Спосіб за п. 1, в якому етап визначення містить прийом від одного або більше необслуговуючих стільників, RPI для одного або більше необслуговуючих стільників. 9. Спосіб за п. 8, в якому етап прийому згаданої RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників. 10. Спосіб за п. 8, в якому згадана RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ). 11. Спосіб за п. 1, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору стільників або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника. 12. Спосіб за п. 1, в якому етап вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником. 13. Спосіб за п. 1, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником. 14. Спосіб за п. 13, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для згаданих визначених підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд. 15. Спосіб за п. 14, в якому проміжок вимірювання триває щонайменше 10 мілісекунд. 16. Спосіб за п. 13, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання. 17. Спосіб за п. 13, який додатково містить посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу зі згаданим визначеним набором підкадрів. 18. Спосіб за п. 17, в якому запит на зміщення оснований на згаданій RPI згаданих стільників. 19. Пристрій для бездротового зв'язку, який містить: засіб для прийому передач від множини стільників, причому передачі включають в себе множину підкадрів; засіб для визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і засіб для виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів. 20. Пристрій за п. 19, який додатково містить засіб для представлення звіту про вимірювання. 21. Пристрій за п. 19, в якому засіб для визначення сконфігурований для прийому від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників. 22. Пристрій за п. 21, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB). 23. Пристрій за п. 19, в якому засіб для визначення сконфігурований для: прийому від обслуговуючого стільника згаданої RPI для обслуговуючого стільника; і 14 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 одержання RPI для одного або більше необслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника. 24. Пристрій за п. 23, в якому етап одержання RPI для одного або більше необслуговуючих стільників містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою, як RPI для обслуговуючого стільника. 25. Пристрій за п. 23, в якому етап одержання RPI для одного або більше необслуговуючих стільників містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів. 26. Пристрій за п. 19, в якому засіб для визначення сконфігурований для прийому від одного або більше необслуговуючих стільників RPI для одного або більше необслуговуючих стільників. 27. Пристрій за п. 26, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників. 28. Пристрій за п. 26, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ). 29. Пристрій за п. 19, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP), утворюючого перешкоди стільника. 30. Пристрій за п. 19, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником. 31. Пристрій за п. 19, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником. 32. Пристрій за п. 31, в якому засіб для виконання сконфігурований для виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд. 33. Пристрій за п. 32, в якому проміжок вимірювання триває щонайменше 10 мілісекунд. 34. Пристрій за п. 31, в якому засіб для виконання сконфігурований для виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання. 35. Пристрій за п. 31, який додатково містить засіб для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів. 36. Пристрій за п. 35, в якому запит на зміщення оснований на згаданій RPI згаданих стільників. 37. Пристрій для бездротового зв'язку, який містить: приймач, сконфігурований для прийому передач від множини стільників, причому передачі включають в себе множину підкадрів; і щонайменше один процесор, сконфігурований для: визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів. 38. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для представлення звіту про вимірювання. 39. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для визначення підкадрів шляхом прийому від обслуговуючого стільника згаданої RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників. 40. Пристрій за п. 39, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB). 41. Пристрій за п. 37, в якому згаданий щонайменше один процесор сконфігурований для визначення підкадрів за допомогою: прийому, від обслуговуючого стільника, RPI для обслуговуючого стільника; і одержання RPI для одного або більше необслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника. 42. Пристрій за п. 41, в якому етап одержання містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника. 43. Пристрій за п. 41, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів. 15 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 44. Пристрій за п. 37, в якому щонайменше один процесор сконфігурований для визначення підкадрів за допомогою прийому, від одного або більше необслуговуючих стільників, RPI для одного або більше необслуговуючих стільників. 45. Пристрій за п. 44, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників. 46. Пристрій за п. 44, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ). 47. Пристрій за п. 37, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки згаданого визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника. 48. Пристрій за п. 37, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником. 49. Пристрій за п. 37, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником. 50. Пристрій за п. 49, в якому згаданий щонайменше один процесор сконфігурований для виконання вимірювання радіоресурсів за допомогою виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд. 51. Пристрій за п. 50, в якому проміжок вимірювання триває щонайменше 10 мілісекунд. 52. Пристрій за п. 49, в якому згаданий щонайменше один процесор сконфігурований для виконання вимірювання радіоресурсів за допомогою виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання. 53. Пристрій за п. 49, який додатково містить передавач, сконфігурований для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів. 54. Пристрій за п. 53, в якому запит на зміщення оснований на згаданій RPI згаданих стільників. 55. Зчитуваний комп'ютером носій, що містить інструкції, які зберігаються на ньому, для: прийому передач від множини стільників, причому передачі включають в себе множину підкадрів; визначення набору підкадрів зі згаданої множини підкадрів для включення у вимірювання радіоресурсів на основі інформації розділення ресурсів (RPI); і виконання вимірювання радіоресурсів для згаданого визначеного набору підкадрів. 56. Зчитуваний комп'ютером носій за п. 55, який додатково містить інструкції для представлення звіту про вимірювання. 57. Зчитуваний комп'ютером носій за п. 55, в якому етап визначення містить прийом, від обслуговуючого стільника, RPI як для обслуговуючого стільника, так і для одного або більше необслуговуючих стільників. 58. Зчитуваний комп'ютером носій за п. 57, в якому список сусідів від обслуговуючого стільника переносить згадану RPI в блоці системної інформації (SIB). 59. Зчитуваний комп'ютером носій за п. 55, в якому визначення містить: прийом, від обслуговуючого стільника, RPI для обслуговуючого стільника; і одержання RPI для одного або більше необслуговуючих стільників на основі згаданої RPI для обслуговуючого стільника. 60. Зчитуваний комп'ютером носій за п. 59, в якому етап одержання містить розгляд згаданої RPI для одного або більше необслуговуючих стільників, яка повинна бути тією самою як RPI для обслуговуючого стільника. 61. Зчитуваний комп'ютером носій за п. 59, в якому етап одержання містить виконання сліпого виявлення на основі виконання вимірювання радіоресурсів для прийнятих підкадрів. 62. Зчитуваний комп'ютером носій за п. 55, в якому етап визначення містить прийом від одного або більше необслуговуючих стільників RPI для одного або більше необслуговуючих стільників. 63. Зчитуваний комп'ютером носій за п. 62, в якому етап прийому RPI для одного або більше необслуговуючих стільників містить зчитування типу 1 блока системної інформації (SIB1) від одного або більше необслуговуючих стільників. 64. Зчитуваний комп'ютером носій за п. 62, в якому RPI для одного або більше необслуговуючих стільників переноситься в основному блоці інформації (МІВ). 16 UA 108098 C2 5 10 15 20 25 30 35 40 45 50 55 60 65. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів є якістю прийому опорного сигналу (RSRQ), основаною на щонайменше індикаторі рівня прийнятого сигналу (RSSI) тільки визначеного набору підкадрів або потужності прийому опорного сигналу (RSRP) утворюючого перешкоди стільника. 66. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів містить внутрішньочастотне вимірювання радіоресурсів, асоційоване з обслуговуючим стільником або необслуговуючим стільником. 67. Зчитуваний комп'ютером носій за п. 55, в якому вимірювання радіоресурсів містить міжчастотне або між-RAT (технологія радіодоступу) вимірювання радіоресурсів, асоційоване з необслуговуючим стільником. 68. Зчитуваний комп'ютером носій за п. 67, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом проміжку вимірювання довше ніж 6 мілісекунд. 69. Зчитуваний комп'ютером носій за п. 68, в якому проміжок вимірювання триває щонайменше 10 мілісекунд. 70. Зчитуваний комп'ютером носій за п. 67, в якому етап виконання містить виконання міжчастотного або між-RAT вимірювання радіоресурсів для визначеного набору підкадрів протягом множинних проміжків вимірювання. 71. Зчитуваний комп'ютером носій за п. 67, який додатково містить інструкції для посилання запиту на зміщення проміжку вимірювання для міжчастотного або між-RAT вимірювання радіоресурсів для збігу з визначеним набором підкадрів. 72. Зчитуваний комп'ютером носій за п. 71, в якому запит на зміщення оснований на згаданій RPI згаданих стільників. 73. Спосіб для бездротового зв'язку, який містить: визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; генерування в першій базовій станції інформації розділення ресурсів (RPI) зі щонайменше одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції; і передачу підкадрів від першої базової станції згідно зі згаданою RPI, при цьому щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією. 74. Спосіб за п. 73, в якому перша базова станція використовує відмінну RAT, ніж друга базова станція. 75. Спосіб за п. 73, в якому перша базова станція використовує відмінну частоту, ніж друга базова станція. 76. Спосіб за п. 73, в якому щонайменше один підкадр містить більше ніж 2 підкадри. 77. Спосіб за п. 73, в якому етап визначення містить прийом індикації проміжку вимірювання за допомогою зворотного з'єднання між першою і другою базовими станціями. 78. Пристрій для бездротового зв'язку, який містить: засіб для визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; засіб для генерування інформації розділення ресурсів (RPI) зі щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів пристрою; і засіб для передачі підкадрів від пристрою згідно зі згаданою RPI, в якому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією. 79. Пристрій за п. 78, в якому пристрій використовує відмінну RAT, ніж базова станція. 80. Пристрій за п. 78, в якому пристрій використовує відмінну частоту, ніж базова станція. 81. Пристрій за п. 78, в якому щонайменше один підкадр містить більше ніж 2 підкадри. 82. Пристрій за п. 78, в якому засіб для визначення сконфігурований для прийому індикації проміжку вимірювання за допомогою зворотного з'єднання між пристроєм і базовою станцією. 83. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, сконфігурований для: визначення проміжку вимірювання, асоційованого з базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; і генерування інформації розділення ресурсів (RPI) зі щонайменше одним підкадром, позначеним для вимірювань радіоресурсів пристрою; і передавач, сконфігурований для передачі підкадрів від пристрою згідно зі згаданою RPI, при цьому щонайменше один підкадр, позначений для вимірювань радіоресурсів пристрою, потрапляє в межі проміжку вимірювання, асоційованого з базовою станцією. 17 UA 108098 C2 5 10 15 20 84. Пристрій за п. 83, в якому пристрій використовує відмінну RAT, ніж базова станція. 85. Пристрій за п. 83, в якому пристрій використовує відмінну частоту, ніж базова станція. 86. Пристрій за п. 83, в якому щонайменше один підкадр містить більше ніж 2 підкадри. 87. Пристрій за п. 83, в якому згаданий щонайменше один процесор сконфігурований для визначення проміжку вимірювання за допомогою прийому індикації проміжку вимірювання за допомогою зворотного з'єднання між пристроєм і базовою станцією. 88. Зчитуваний комп'ютером носій, що містить інструкції, які зберігаються на ньому, для: визначення в першій базовій станції проміжку вимірювання, асоційованого з другою базовою станцією, для міжчастотного або між-RAT (технологія радіодоступу) вимірювання радіоресурсів; генерування в першій базовій станції інформації розділення ресурсів (RPI) щонайменше з одним підкадром, позначеним для вимірювань радіоресурсів першої базової станції; і передачі підкадрів від першої базової станції згідно з RPI, де щонайменше один підкадр, позначений для вимірювань радіоресурсів першої базової станції, потрапляє в межі проміжку вимірювання, асоційованого з другою базовою станцією. 89. Зчитуваний комп'ютером носій за п. 88, в якому перша базова станція використовує відмінну RAT, ніж друга базова станція. 90. Зчитуваний комп'ютером носій за п. 88, в якому перша базова станція використовує відмінну частоту, ніж друга базова станція. 91. Зчитуваний комп'ютером носій за п. 88, в якому щонайменше один підкадр містить більше ніж 2 підкадри. 92. Зчитуваний комп'ютером носій за п. 88, в якому етап визначення містить прийом індикації проміжку вимірювання за допомогою зворотного з'єднання між першою і другою базовими станціями. 18 UA 108098 C2 19 UA 108098 C2 20 UA 108098 C2 21 UA 108098 C2 22 UA 108098 C2 23 UA 108098 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
Назва патенту англійськоюHeterogeneous network (hetnet) user equipment (ue) radio resource management (rrm) measurements
Автори англійськоюJi, Tingfang, Song, Osok, Damnjanovic, Aleksandar, Gaal, Peter, Luo, Tao, Malladi, Durga Prasad
Автори російськоюЦзи Тинфан, Сонг Осок, Дамнянович Александр, Гаал Питер, Ло Тао, Маллади Дурга Прасад
МПК / Мітки
МПК: H04W 28/04, H04W 24/08
Мітки: вимірювання, керування, обладнання, rrm, користувацького, гетерогенний, радіоресурсами, hetnet, мережі
Код посилання
<a href="https://ua.patents.su/26-108098-vimiryuvannya-keruvannya-radioresursami-rrm-koristuvackogo-obladnannya-ue-v-geterogennijj-merezhi-hetnet.html" target="_blank" rel="follow" title="База патентів України">Вимірювання керування радіоресурсами (rrm) користувацького обладнання (ue) в гетерогенній мережі (hetnet)</a>
Пристрій контролю та вимірювання опору ізоляції електричної мережі
Номер патенту: 52395
Опубліковано: 15.02.2005
Автори: Мединський Ростислав Володимирович, Кобрій Богдан Володимирович, Дурняк Богдан Іванович, Журахівський Анатолій Валентинович, Кенс Юрій Амброзієвич
МПК: G01R 31/02
Мітки: контролю, електричної, пристрій, мережі, опору, ізоляції, вимірювання
Формула / Реферат:
Пристрій контролю та вимірювання опору ізоляції електричної мережі, що містить джерело постійної напруги, яке через розв'язуючий елемент під'єднано до електромережі з ізольованою нейтраллю, та індикатор величини опору ізоляції електромережі, який відрізняється тим, що додатково містить обмежувач перенапруг, конденсатор, перетворювач «струм-напруга», джерело компенсуючої напруги та суматор напруг, причому конденсатор і обмежувач перенапруг...
Зменшення перешкод для каналів керування в мережі бездротового зв’язку
Номер патенту: 99754
Опубліковано: 25.09.2012
Автори: Агравал Авніш, Бхушан Нага, Паланкі Раві, Кхандекар Аамод Д.
МПК: H04W 72/00, H04W 16/00
Мітки: перешкод, мережі, бездротового, зменшення, каналів, зв'язку, керування
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етапи, на яких генерують за допомогою користувацького обладнання (UE) запит для зниження перешкод на радіоресурсах, які використовуються для каналу керування обслуговуючою базовою станцією, що обслуговує UE; відправляють запит у заважаючу базову станцію; і приймають в UE канал керування на радіоресурсах від обслуговуючої базової станції; і здійснюють зв'язок з...
Пристрій вимірювання напруги в мережі постійного струму з бездротовою передачею даних
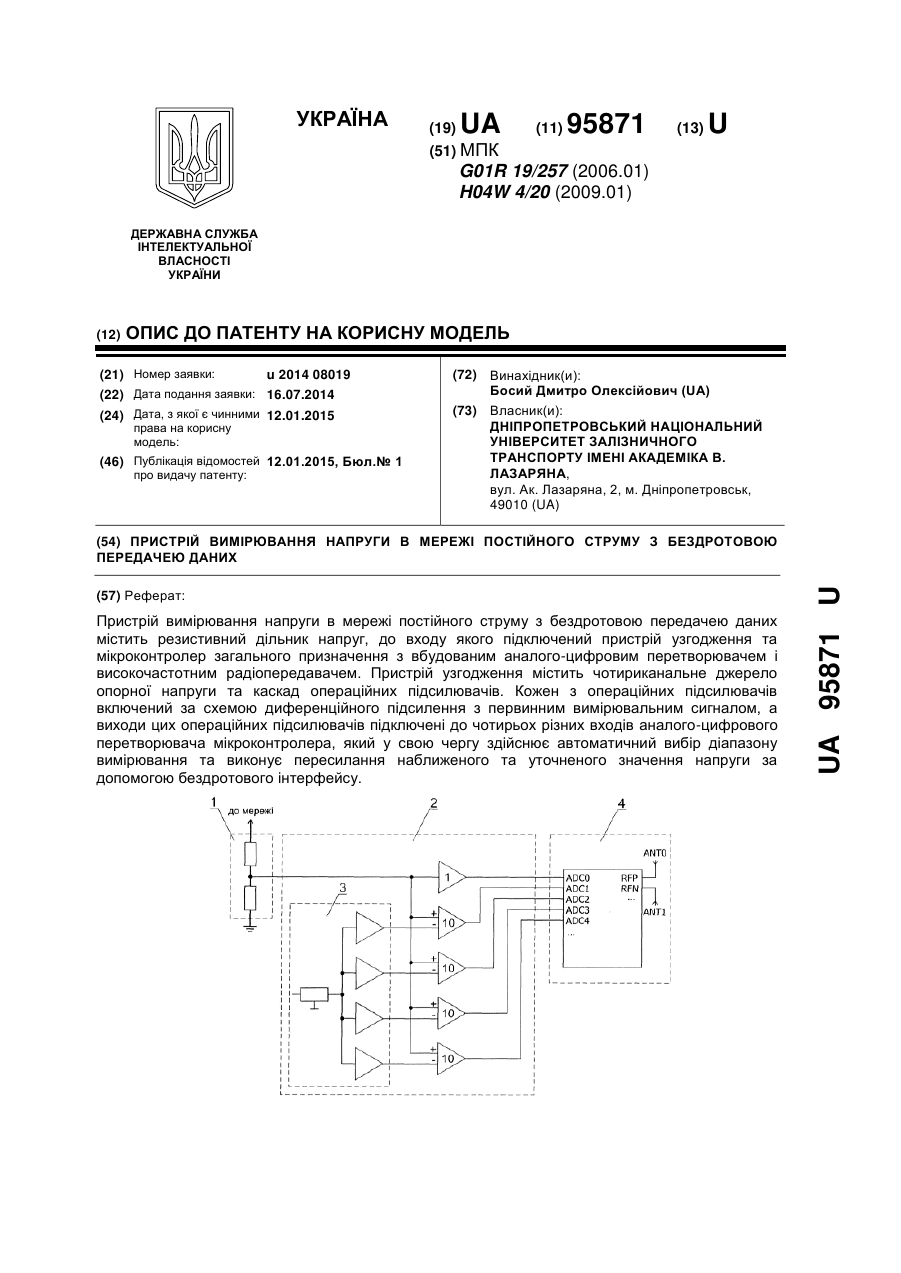
Номер патенту: 95871
Опубліковано: 12.01.2015
Автор: Босий Дмитро Олексійович
МПК: H04W 4/20, G01R 19/257
Мітки: бездротовою, постійного, струму, пристрій, мережі, передачею, напруги, вимірювання, даних
Формула / Реферат:
Пристрій вимірювання напруги в мережі постійного струму з бездротовою передачею даних, що містить резистивний дільник напруг, до входу якого підключений пристрій узгодження та мікроконтролер загального призначення з вбудованим аналого-цифровим перетворювачем і високочастотним радіопередавачем, який відрізняється тим, що пристрій узгодження містить чотириканальне джерело опорної напруги та каскад операційних підсилювачів, кожен з операційних...
Пристрій контролю та вимірювання опору ізоляції апарата електричної мережі
Номер патенту: 72349
Опубліковано: 15.02.2005
Автори: Яцейко Андрій Ярославович, Кенс Юрій Амброзієвич, Салук Ярослав Іванович, Журахівський Анатолій Валентинович
МПК: G01R 27/16, G01R 31/02
Мітки: апарата, пристрій, вимірювання, опору, мережі, контролю, ізоляції, електричної
Формула / Реферат:
Пристрій контролю та вимірювання опору ізоляції апарата електричної мережі, що містить послідовно з'єднані блоки приєднання, під'єднання та вимірювання, причому блок приєднання містить розрядник, під'єднаний до вимірного та заземленого виводів апарата, який відрізняється тим, що блок приєднання додатково містить конденсатор, під'єднаний паралельно розряднику, а блок вимірювання містить джерело постійної напруги, перетворювач...
Пристрій для вказування бажаної потужності передачі та плавного керування потужністю в бездротовій мережі
Номер патенту: 97583
Опубліковано: 27.02.2012
Автори: Паланкі Раві, Горохов Алєксєй Ю.
МПК: H04W 16/16, H04W 52/00
Мітки: потужності, мережі, бездротовій, пристрій, потужністю, передачі, керування, бажаної, вказування, плавного
Формула / Реферат:
1. Пристрій для бездротового зв'язку, який містить:засіб для прийому перешкод від утворюючого перешкоди вузла;засіб для сигналізування запиту, який приймається утворюючим перешкоди вузлом, щоб виконати передачу на рівні потужності так, щоб досягнути бажаного рівня перешкод; причому засіб для сигналізування додатково виконаний з можливістю визначення помилки калібрування, зумовленої коефіцієнтом підсилення кола приймача і...