Шпиндельний вузол для надглибокого прецизійного шліфування
Номер патенту: 28729
Опубліковано: 16.10.2000
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович

Формула / Реферат
1. Шпиндельний вузол для надглибокого прецизійного шліфування, що включає корпус з розміщеним в ньому валом, один кінець якого встановлений на пружній радіальній опорі з пружними елементами, який відрізняється тим, що пружна радіальна опора включає рівномірно розміщені по колу радіальні пази, в яких розміщені пружно підтиснуті в радіальному напрямку башмаки, до того ж кожен паз є пружно підтиснутим в ньому башмаком створює пружний елемент пружної радіальної опори, при цьому, у всякому разі, дві пари згаданих пружних елементів, розміщених по осям Х і Y системи координат XOY, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, виконані з можливістю регулювання сили тиску на башмаки в радіальному напрямку за допомогою п'єзостовпів, при цьому шпиндельний вузол оснащений датчиками положення вала по осям Х1 і Y2, встановленими по півосям +О1Х1 і -O1Y1 системи координат X1O1Y1, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, а вісі системи координат X1O1Y1 паралельні осям системи координат XOY, причому датчики положення вала по осям Х1 і Y1 через систему управління і стабілізації руху вала електричне зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, і датчиками величини примусової прецесії осі обертання вала по півосям +О2Y2 і –О2Y2 встановленими по півосям –О2Y2 і +О2Y2, відповідно, системи координат Х2О2Y2, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, а вісі системи координат Х2O2Y2 паралельні осям системи координат XOY, причому датчики величини примусової прецесії осі обертання вала по півосям +O2Y2 і -O2Y2 через систему управління і стабілізації електричне зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, другий кінець вала за допомогою закріпленої на його торці кульової опори шарнірно з'єднаний з валом осьової аеростатичної опори, шарнірно з'єднаного з п'ятою осьової аеростатичної опори, яка також включає встановлені з зазорами відносно п'яти по обох їх сторонах підп'ятники, на яких розміщені регулятори тиску, які складаються з п'єзоелектричних двигунів і регульовочних голок встановлених в камерах наддування і жиклерів подачі газу співвісними з регульовочними голками, причому вал і п'ята виконані роздільно з можливістю зміни нахилу площини п'яти до осі обертання вала, а регулятори тиску газу встановлені, в усякому разі, на одному із підп'ятників, в якому виконані жиклери подачі газу, причому вал осьової аеростатичної опори встановлений у втулці на опорах кочення з можливістю зміщення в осьовому напрямку відносно корпуса, шпиндельний вузол для прецизійного шліфування обладнаний також датчиком осьового положення вала, встановленим з зазором відносно основи кульової опори і датчиком величини осьового коливання вала, встановленими у правому підп'ятнику осьової аеростатичної опори, причому, згадані датчики через блок управління і стабілізації електричне зв'язані п'єзоелектричними двигунами регуляторів тиску, система управління і стабілізації руху вала шпиндельного вузла включає блок стабілізації положення конуса прецесії осі обертання вала, блок формування примусової прецесії осі обертання вала, блок стабілізації примусової прецесії осі обертання вала, блок формування і стабілізації амплітуди осьових коливань вала, причому датчик положення по осі Х1 з'єднаний з третім входом блока стабілізації положення конуса прецесії осі обертання вапа, датчик положення вала по осі Y1 з'єднаний з другим входом блоку стабілізації положення конуса прецесії осі обертання вала, датчик величини примусової прецесії осі обертання вала по півосі +О2Y2 з'єднаний з дванадцятим входом блока стабілізації положення конуса прецесії осі обертання вала, датчик величини примусової прецесії осі обертання вала -O2Y2 з'єднаний з першим входом блока стабілізації положення конуса прецесії осі обертання вала, перший і другий виходи блоку стабілізації положення конуса прецесії ссі обертання вала з'єднані з п'єзостовпами пружних елементів з регульованою силою тиску, встановлених по осі Y системи координат XOY, а його третій і четвертий виходи з'єднані з п'єзостовпами пружних елементів з регульованою силою тиску, встановлених по осі Х системи координат XOY, п'ятий і шостий виходи блоку стабілізації положення прецесії осі обертання вала з'єднані з першим і другим входами блоку формування примусової прецесії осі обертання вала, відповідно, а п'ятий, шостий, сьомий і восьмий виходи блоку формування примусової прецесії осі обертання вала з'єднані з шостим, сьомим, четвертим і п'ятим входами блоку стабілізації положення конуса прецесії осі обертання вала, відповідно, перший, другий, третій і четвертий виходи блока формування примусової прецесії осі обертання вала з'єднані з першим, четвертим, другим і третім входами блоку стабілізації амплітуди примусової прецесії осі обертання вала, відповідно, а його перший, другий, третій і четвертий виходи з'єднані з восьмим, дев'ятим, десятим і одинадцята входами блоку стабілізації положення конуса прецесії осі обертання вала, відповідне дев'ятий і десятий виходи блоку формування примусової прецесії осі обертання вал; з'єднані з п'ятим і шостим входами блоку стабілізації амплітуди примусової прецесії осі обертання вала відповідно, а через розподілювальні діоди з'єднані з першим входом блоку формування і стабілізації амплітуди осьових коливань вала, датчик вісьового положення вала з'єднаний з третім входом, датчик величини осьового коливання з'єднаний із другим входом, а п'єзоелектричні двигуни регуляторів тиску з'єднані з першим і другим виходамі блоку формування і стабілізації амплітуди вісьових коливань вала.
2. Шпиндельний вузол по п. 1, який відрізняється тим, що п'єзоелектричні двигуні регуляторів тиску газу вісьової аеростатичної опори обладнані штовхачами, які взаємодіють з закріпленим, у всякому разі, на одному з підп'ятників введеним у пристрій, коромислом, регулювальні голки закріплені на коромислах, а точка взаємодії штовхача з коромислом знаходиться між регульованою голкою і віссю повороту коромисла.
3. Шпиндельний вузол по п. 1, який відрізняється тим, що пружна радіальна опора забезпечена пружними елементами з підвищеною регульованою силою тиску, кожен з яких включає п'єзостовп з встановленим на ньому штовхачем, який взаємодіє з коромислом, встановленим на стійці з можливістю повороту, другий кінець якого упирається в напрямну шайбу, причому пружина розміщена між башмаком і напрямною шайбою, а точка взаємодії штовхача з коромислом знаходиться між віссю повороту коромисла і точкою упору коромисла в напрямну шайбу.
Текст
1. Шпиндельний вузол для надглибокого прецизійного шліфування, що включає корпус з розміщеним в ньому валом, один кінець якого встановлений на пружній радіальній опорі з пружними елементами, відрізняється тим, що пружна радіальна опора включає рівномірно розміщені по колу радіальні пази, в яких розміщені пружно підтиснуті в радіальному напрямку башмаки, до того ж кожен паз з пружно підтиснутим в ньому башмаком створює пружний елемент пружної радіальної опори, при цьому, у всякому разі, дві пари згаданих пружних елементів, розміщених по осям Х і Y системи координат XOY, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, виконані з можливістю регулювання сили тиску на башмаки в радіальному напрямку за допомогою п'єзостовпів, при цьому шпиндельний вузол оснащений датчиками положення вала по осям Х1 і Y1 , встановленими по півосям +О1Х1 і -O1 Y1 системи координат X1 O1 Y1, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, а вісі системи координат X1 O1 Y1 паралельні осям системи координат XOY, причому датчики положення вала по осям Х1 і Y1 через систему управління і стабілізації руху вала електрично зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, і датчиками величини примусової прецесії осі обертання вала по півосям +О2 Y2 і -О2 Y2 встановленими по півосям -О2Y2 і +О2 Y1 , відповідно, системи координат X2 О2 Y2, початок якої лежить на осі симетрії внутрішньої поверхні корпуса, а вісі системи координат X2O 2 Y2 паралельні осям системи координат XOY, причому датчики величини примусової прецесії осі обертання вала по півосям +О2Y2 і -О2 Y2 через систему управління і стабілізації електрично зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, другий кінець вала за допомогою закріпленої на його торці кульової опори шарнірно з'єднаний з валом осьової аеростатичної опори, шарнірно A (54) ШПИНДЕЛЬНИЙ ВУЗОЛ ДЛЯ НАДГЛИБОКОГО ПРЕЦИЗІЙНОГО ШЛІФУВАННЯ 28729 цесії осі обертання вала з'єднані з першим і другим входами блоку формування примусової прецесії осі обертання вала, відповідно, а п'ятий, шостий, сьомий і восьмий виходи блоку формування примусової прецесії осі обертання вала з'єднані з шостим, сьомим, четвертим і п'ятим входами блоку стабілізації положення конуса прецесії осі обертання вала, відповідно, перший, другий, третій і четвертий виходи блока формування примусової прецесії осі обертання вала з'єднані з першим, четвертим, другим і третім входами блоку стабілізації амплітуди примусової прецесії осі обертання вала, відповідно, а його перший, другий, третій і четвертий ви ходи з'єднані з восьмим, дев'ятим, десятим і одинадцятим входами блоку стабілізації положення конуса прецесії осі обертання вала, відповідно, дев'ятий і десятий виходи блоку формування примусової прецесії осі обертання вала з'єднані з п'ятим і шостим входами блоку стабілізації амплітуди примусової прецесії осі обертання вала відповідно, а через розподілювальні діоди з'єднані з першим входом блоку формування і стабілізації амплітуди осьових коливань вала, датчик вісьового положення вала з'єднаний з третім входом, датчик величини осьового коливання з'єд наний із другим входом, а п'єзоелектричні двигуни регуляторів тиску з'єднані з першим і другим виходами блоку формування і стабілізації амплітуди вісьових коливань вала. 2. Шпиндельний вузол по п. 1, відрізняється тим, що п'єзоелектричні двигуни регуляторів тиску газу вісьової аеростатичної опори обладнані штовхачами, які взаємодіють з закріпленим, у всякому разі, на одному з підп'ятників введеним у пристрій, коромислом, регулювальні голки закріплені на коромислах, а точка взаємодії штовхача з коромислом знаходиться між регульованою голкою і віссю повороту коромисла. 3. Шпиндельний вузол по п. 1, відрізняється тим, що пружна радіальна опора забезпечена пружними елементами з підвищеною регульованою силою тиску, кожен з яких включає п'єзостовп з встановленим на ньому штовхачем, який взаємодіє з коромислом, встановленим на стійці з можливістю повороту, другий кінець якого упирається в напрямну шайбу, причому пружина розміщена між башмаком і напрямною шайбою, а точка взаємодії штовхача з коромислом знаходиться між віссю повороту коромисла і точкою упору коромисла в напрямну шайбу. Винахід відноситься до верстатобудування і може бути використаний на шліфувальних верстатах для прецизійного шліфування. Найбільш близьким за технічною суттю до технічного рішення, щопропонується, є шпиндельний вузол (див. а.с. № 957363, М.кл.3 В24В41/04, опубл. бюл. № 43, 1982 p.), він виконаний у вигляді шліфувальної головки, котра містить в собі корпус з розміщеним в ньому валом, кінці якого вставлені на пружних радіальних опорах в підшипниках кочення з пружними елементами, що утворені виготовленням опори у формі крильчатки з пластичними пелюстками. Таке рішення забезпечує підвищення вібростійкості при обробці. Установлення підшипників кочення вала в пружних радіальних опорах дозволяє забезпечити легкий перехід через першу і другу критичні швидкості, а також використати в зоні робочих швидкостей ефект самоцентрування, в результаті чого суттєво підвищується точність формоутворення. Недоліком шліфувального пристрою за прототипом є те, що він забезпечує надглибоке шліфування тільки за рахунок прецесії осі обертання, яка досягається шляхом його розбалансування і вибором жорсткості пружних радіальних опор. Але при цьому не забезпечується стабілізація положення конуса прецесії осі обертання, що призводить до зниження точності формоутворення. Це пояснюється тим, що для досягнення глибокого і надглибокого шліфування вала шпиндельного вузла необхідно задати складний рух, складовими якого є наступні прості рухи: - прецесія осі обертання шпиндельного вузла з заданим кутом a потр. при вершині конуса прецесії вала в площині максимальної зміни орієнтації шліфувального круга відносно оброблюваної деталі; - гіроскопічні коливання осі обертання вала, визначувані примусовою прецесією цієї осі обертання; - осьові коливання вала в напрямі оброблюваної деталі. Крім того, для досягнення високої точності обробки амплітуди цих р ухів повинні в процесі шліфування стабілізуватись і бути прив'язаними до фіксованих кутів повороту вала. В основу винаходу поставлена задача такого удосконалення конструкції шпиндельного вузла для надглибокого прецизійного шліфування, а також оснащення його системою управління і стабілізації руху осі обертання вала цього шпиндельного вузла по складній траєкторії, котра є суперпозицією чотирьох простих рухів осі обертання вала: - прецесії осі обертання вала шпиндельного вузла з заданим кутом a потр. при вершині конуса прецесії цієї осі обертання; - примусової прецесії осі обертання вала в D околі площини максимальної зміни орієнтації шліфувального круга відносно оброблюваної поверхні з заданою амплітудою Ап.п. прецесії; - гіроскопічних коливань осі обертання вала в площині зміни орієнтації шліфувального круга відносно оброблюваної поверхні, обумовлених примусовою прецесією осі обертання вала з амплітудою Аг.к.; - осьових коливань вала шпиндельного вузла в напрямі оброблюваної поверхні з амплітудою Ао. Внаслідок цих технічних результатів досягається можливість здійснення ефекту надглибокого шліфування з більшою товщиною припуску, що знімається (5 мм за один прохід шліфувальним кругом оброблюваної поверхні). Крім того, амплітуда рухів, які складають складний рух осі обертання вала, стабілізуються, а початок і закінчення кожного складового руху осі обертання вала, на кожному його оберті прив'язу 2 28729 ються до фіксованих кутів повороту вала, що забезпечує обробку шліфуванням з високою точністю, при якій похибка формоутворення не перевищує 0,5 мкм. Рішення задачі досягається тим, що у шпиндельному вузлі для надглибокого прецизійного шліфування, що включає корпус з розміщеним в ньому валом, один кінець якого встановлений на пружній радіальній опорі з пружними елементами, згідно з винаходом пружна радіальна опора включає рівномірно розміщені по колу радіальні пази, в яких розміщені пружно підтиснуті в радіальному напрямку башмаки, до того ж кожен паз з пружно підтиснутим в ньому башмаком створює пружні елементи пружної радіальної опори, при цьому у всякому разі, дві пари згаданих пружних елементів, розміщених по осях "х" і "у" системи координат XOY, початок якої лежить на осі симетрії внутрішньої поверхні корпусу, виконані з можливістю регулювання сили тиску на башмаки в радіальному напрямку за допомогою п'єзостовпів, при цьому шпиндельний вузол оснащений датчиками положення вала по осях х1 і у1, встановленими по півосям +О1х1 і -О1 у1 системи координат Х1O1 Y1, початок якої лежить на осі симетрії внутрішньої поверхні корпусу, а вісі системи координат X1O1 Y1 паралельні осям системи координат XOY, причому датчики положення вала по осях Х1 і Y1 через систему управління і стабілізації руху вала електрично зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, і датчиками величини примусової прецесії осі обертання вала по півосях +О2Y2i О2 Y2 , встановленими по півосях -О2 Y2i +О 2 Y2 відповідно, системи координат X2 O2 Y2, початок якої лежить на осі симетрії внутрішньої поверхні корпусу, а вісі системи координат X2 O2 Y2 паралельні осям системи координат XOY, причому датчики величини примусової прецесії осі обертання вала по півосях +O2 Y2 і -O2 Y2 через систему управління і стабілізації електрично зв'язані з п'єзостовпами пружних елементів з регульованою силою тиску на башмаки в радіальному напрямку, другий кінець вала за допомогою закріпленої на його торці кульової опори шарнірно з'єднаний з валом осьової аеростатичної опори, шарнірно з'єднаного з п'ятою осьової аеростатичної опори, яка також включає встановлені з зазорами відносно п'яти по обох її сторонах підп'ятники, на яких розміщені регулятори тиску, які складаються з п'єзоелектричних двигунів і регульовочних голок, встановлених в камерах наддування і жиклерів подачі газу співвісними з регульовочними голками, причому вал і п'ята виконані роздільно з можливістю зміни нахилу площини п'яти до осі обертання вала, а регулятори тиску газу встановлені, в усякому разі, на одному із підп'ятників, в якому виконані жиклери подачі газу, причому, вал осьової аеростатичної опори встановлений у втулці на опорах кочення з можливістю зміщення в осьовому напрямку відносно корпусу, шпиндельний вузол для прецизійного шліфування обладнаний також датчиком осьового положення вала, встановленим з зазором відносно основи кульової опори і датчиком величини осьового коливання вала, встановленим у правому підп'ятнику осьової аеростатичної опори, причому, згадані датчики через блок управління і ста білізації електрично зв'язані з п'єзоелектричними двигунами регуляторів тиску, система управління і стабілізації руху вала шпиндельного вузла для надглибокого прецизійного шліфування включає блок стабілізації положення конуса прецесії осі обертання вала, блок формування примусової прецесії осі обертання вала, блок стабілізації примусової прецесії осі обертання вала, блок формування і стабілізації амплітуди осьових коливань вала, причому, датчик положення вала по осі х1 з'єднаний з третім входом блока стабілізації положення конуса прецесії осі обертання вала, датчик положення вала по осі у1 з'єднаний з другим входом блока стабілізації положення конуса прецесії осі обертання вала, датчик величини примусової прецесії осі обертання вала по півосі +О2Y2 з'єднаний з дванадцятим входом блока стабілізації положення конуса прецесії осі обертання вала, датчик величини примусової прецесії осі обертання вала по півосі -О2 Y2 з'єднаний з першим входом блока стабілізації положення конуса прецесії осі обертання вала, перший і другий виходи блока стабілізації положення конуса прецесії осі обертання вала з'єднані з п'єзостовпами пружних елементів з регульованою силою тиску, встановлених по осі "у" системи координат XOY, а його третій і четвертий виходи з'єднані з п'єзостовпами пружних елементів з регульованою силою тиску, встановлених по осі "х" системи координат XOY, п'ятий і шостий ви ходи блока стабілізації положення конуса прецесії осі обертання вала з'єднані з першим і другим входами блока формування примусової прецесії осі обертання вала, відповідно, а п'ятий, шостий, сьомий і восьмий виходи блока формування примусової прецесії осі обертання вала з'єднані з шостим, сьомим, четвертим і п'я тим входами блока стабілізації положення конуса прецесії осі обертання вала, відповідно, перший, другий, третій і четвертий виходи блока формування примусової прецесії осі обертання вала з'єднані з першим, четвертим, другим і третім входами блока стабілізації амплітуди примусової прецесії осі обертання вала, відповідно, а його перший, др угий, третій і четвертий ви ходи з'єднані з восьмим, дев'ятим, десятим і одинадцятим входами блока стабілізації положення конуса прецесії осі обертання вала, відповідно, дев'ятий і десятий виходи блока формування примусової прецесії осі обертання вала з'єднані з п'ятим і шостим входами блока стабілізації амплітуди примусової прецесії осі обертання вала, відповідно, а через розподілювальні діоди з'єднані з першим входом блока формування і стабілізації амплітуди осьових коливань вала, датчик осьового положення вала з'єднаний з третім входом, датчик величини осьового коливання вала з'єднаний з другим входом, а п'єзоелектричні двигуни регуляторів тиску з'єднані з першим і другим виходами блока формування і стабілізації амплітуди осьових коливань вала. Рішення задачі досягається також тим, що у шпиндельному вузлі для надглибокого прецизійного шлі фування, що пропонується, п'єзоелектричні двигуни регуляторів тиску газу осьової аеростатичної опори є сенс обладнати штовхачами, які взаємодіють із закріпленим, у всякому разі, на одному з підп'ятників введеним коромислом, регулювальні голки закріплені на коромислах, а точка взаємодії 3 28729 штовхача з коромислом знаходиться між регулювальною голкою і віссю повороту коромисла. У шпиндельному вузлі для надглибокого прецизійного шліфування, що пропонується, пружна радіальна опора може бути забезпечена пружними елементами з підвищеною регульованою силою тиску, кожен з яких включає п'єзостовп з встановленим на ньому штовхачем, який взаємодіє з коромислом, встановленим на стійці з можливістю повороту, другий кінець якого упирається в напрямну шайбу, причому пружина розміщена між башмаком і напрямною шайбою, а точка взаємодії штовхача з коромислом знаходиться між віссю повороту коромисла і точкою упору коромисла в напрямну шайбу. Причинно-наслідковий зв'язок сукупності істотних ознак технічного рішення, що пропонується, з досягаємими технічними результатами складаються в наступному. На фіг. 1 представлений шпиндельний вузол для надглибокого прецизійного шліфування точних елементів оптики і механіки, оснащений системою управління і стабілізації руху вала (осі обертання вала) шпиндельного вузла. Передня частина вала шпиндельного вузла через проміжну радіальну опору кочення утримується пружною радіальною опорою, а кінець вала шарнірно зв'язаний з п'ятою аеростатичної осьової опори. Пружна радіальна опора являє собою втулку з виконаними в ній радіальними пазами, в кожному з яких встановлюють башмак, який утримує зовнішню обойму радіальної опори кочення, в якій розміщений вал, пружину і регульовочний гвинт для встановлення тиску пружини на вал шпиндельного вузла. Паз з встановленим в ньому башмаком, пружиною і регулювальним гвинтом назвемо пружним елементом з зосередженою пружністю пружної радіальної опори. В чотирьох пазах пружної радіальної опори, виконаних по осях Х і Y системи координат ХОY (фіг. 2), початок якої лежить на осі симетрії внутрішньої поверхні корпусу опори, між пружинами і регулювальними гвинтами встановлені п'єзостовпи, які змінюють свою довжину при подачі на них керованого напруження. Ці пружні елементи назвемо пружними елементами з регульованим тиском на вал шпиндельного вузла. Побудована таким чином пружна радіальна опора є керованою пружною радіальною опорою, яка дозволяє створювати в площині встановлення опори тиску на вал в межах кута Q=360°. Аеростатична осьова опора шпиндельного вузла обладнана регуляторами тиску в газовому шарі цієї опори. Це дозволяє переміщува ти п'яту осьової опори, а отже і шарнірно сполучений з нею вал шпиндельного вузла, в осьовому напрямку шляхом подачі сигналів управління на регулятори тиску. До того ж, переміщення вала в осьовому напрямку може здійснюватися з зусиллям, рівним підйомній силі регуляторів тиску. Для досягнення ефекту надглибокого шліфування і високої точності обробки вал шпиндельної опори на кожному оберті на окремих проміжках часу здійснює чотири рухи, які утворюються або виникають, стабілізуються і прив'язуються до фіксованих кутів повороту вала наступним чином. Для завдання прецесії осі обертання вала (фіг. 3) з кутом a потр., при вершині конуса прецесії осі обертання, суміщеної з центром кульової опори, вал шпиндельного вузла розбалансують. Тоді величина зміщення "r" осі обертання вала під дією динамічного навантаження від його геометричної осі обертання дорівнює: r= де e× w2 , k2 - w 2 w - кутова швидкість обертання вала; е - ексцентрицитет вала; k= Cпр . , де Спр. - радіальна жорсткість шпинМ дельного вузла, приведена до площини центра мас вала. По одержаному значенню "r" розраховують кут "a" при вершині конуса прецесії осі обертання вала. Якщо a¹a потр., змінюючи величину ексцентриситету е, жорсткість С пружної радіальної опори, а тож, і Спр., встановлюють кут a=a потр. Для запобігання зміщення в процесі шліфування конуса прецесії осі обертання під впливом сили шліфування Рш, система управління і стабілізації руху вала (фіг. 4) за допомогою датчиків С х1 і Су1 відстежує положення конуса прецесії відносно цих датчиків і запобігає його зміщенню шляхом подачі сигналів управління на пружні елементи з регульованим тиском, встановлені по осях х і у системи XOY. Примусова прецесія осі обертання вала здійснюється в D-околі площини g (фіг. 5) двічі за оберт вала в напрямі півосей +О2Y2 і -О 2 Y2 подачею сигналів управління, які виробляються системою управління і стабілізації руху вала на пружні елементи з регульованою силою тиску, встановлених по осі "у" системи координат XOY (фіг. 4). Амплітуда примусової прецесії Ап.п. осі обертання вала встановлюється і стабілізується в процесі шліфування системою управління і стабілізації руху вала. Прив'язка примусової прецесії осі обертання до фіксованих кутів повороту вала здійснюється за допомогою датчиків амплітуди примусової прецесії С +у2 і С-у2 (фі г. 4) і зробленої на валу під цими датчиками лиски. Примусова прецесія осі обертання в напрямі півосі +О2Y2 (фіг. 5) створюється в момент часу підходу передньої грані лиски під датчик С -у2, (а вектора динамічного навантаження F D до межі D-околу площини g), в напрямі півосі -О2Y2 в момент часу підходу передньої грані лиски під датчик С +у2, а також вектора F D до межі D-околу площини. Гіроскопічні коливання осі обертання вала в площині b зміни орієнтації шліфувального круга відносно оброблюваної деталі (фіг. 5) є наслідком примусової прецесії осі обертання вала, в результаті яких виникає гіроскопічний тиск на пружну радіальну опору, причому момент цього тиску дорівнює 4 28729 фіг. 11 - епюри вихідної напруги вимірника положення вала при примусовій прецесії його вісі обертання; фіг. 12 - епюра вихідної напруги вимірника положення вала при гіроскопічних коливаннях його вісі обертання; фіг. 13 - епюра вихідної напруги інтегратора вихідної напруги вимірника положення вала по вісі х1; фіг. 14 - епюра вихідної напруги інтегратора вихідної напруги вимірника положення вала по вісі y1; фіг. 15 - ілюстрація зміщення конуса прецесії осі обертання вала під дією зовнішнього нагруження; фіг. 16 - радіальна пружна опора з групами паралельно підключених пружних елементів з силою тиску, що регулюється; фіг. 17 - загальний вигляд шпиндельного вузла для надглибокого прецизійного шліфування з пружними елементами з підвищеною силою тиску, що регулюється; фіг. 18 - те ж саме, але з швидкодіючими регуляторами тиску. Шпиндельний вузол для надглибокого прецизійного шліфування включає наступні основні елементи (фіг. 1): корпус 1, в якому розміщений вал 2, один кінець якого установлений на пружній радіальній опорі 3, в якій через проміжний радіальний підшипник 4 встановлена передня частина вала 2, кульову опору 5, закріплену на другому кінці вала 2 і шарнірно сполучену з п'ятою 6 осьової аеростатичної опори 7, систему 8 управління і стабілізації руху вала 2, причому система 8 управління і стабілізації електрично зв'язана (фіг. 4) з пружною радіальною опорою 3, осьовою аеростатичною опорою 7, датчиком 9 положення вала по осі х1 і датчиком 10 положення вала по осі у1, встановлених в перерізі корпусу 1 шпиндельного вузла по Б-Б по півосях +О1Х1 і -О1 Y1 системи координат X1 O1 Y1, початок якої знаходиться на осі симетрії внутрішньої поверхні корпусу 1, датчиком 11 величини примусової прецесії осі обертання вала 2 по півосі -О2Y2 і датчиком 12 величини примусової прецесії осі обертання вала 2 по півосі +О2Y2, встановлених в перерізі по В-В по півосях -О2 Y2 і +О 2 Y2 системи координат X2O2 Y2, осі якої паралельні осям системи координат X1O1 Y1, а початок також лежить на осі симетрії корпусу 1, з датчиком 13 осьового положення вала 2, встановленого з зазором відносно основи 14 кульової опори 5, а також з датчиком 15 величини осьового коливання вала 2 шпиндельного вузла, встановленого в правому підп'ятнику 16 осьової аеростатичної опори 7 з зазором відносно п'яти 6. Пружна радіальна опора 3 включає втулку 17 в перерізі по А-А якої (фіг. 1, 4) в радіальних напрямках і рівномірно по колу зроблені пази 18. В пазах 18 розміщені башмаки 19, пружини 20 і регульовочні гвинти 21. Причому паз 18 з розміщеними в ньому башмаком 19, пружиною 20 і регульовочним гвинтом 21 утворює пружний елемент пружної радіальної опори 3. За допомогою регульовочних гвинтів 21 через пружину 20 встановлюють початковий тиск башмаків 19 на вал 2 через зовнішню обойму 22 проміжного радіального підшипника 4. Mr = Iz × ( W1 ´ W2 ) , де Iz - осьовий момент інерції вала; W2 - кутова швидкість примусової прецесії осі обертання вала. В часі, як наслідок примусової прецесії осі обертання вала, вони прив'язані до моменту часу початку примусової прецесії. Осьові коливання вала в напрямі оброблюваної деталі створюються аеростатичною опорою, оснащеною регуляторами тиску в газовому шарі цієї опори, які створюють додаткову піднімальну силу осьової опори, що регулюється по величині для переміщення вала в осьовому напрямку. Амплітуда осьових коливань Ао вала встановлюється і стабілізується в процесі шліфування системою управління і стабілізації руху вала. Причому, амплітуда Ао встановлюється рівною осьовій складовій амплітуди Ап.п. Осьові коливання вала здійснюються двічі за один оберт вала. Їх прив'язка до кута повороту вала також здійснюється відносно моменту часу підходу передньої грані лиски під датчики С+у2 і С-y2. Причому, кожне осьове коливання виникає протягом часу проходження вектором F D D-околу площини b (фіг. 5). Таким чином, кожен складовий рух складного руху задовольняє двом основним вимогам, котрі забезпечують високу точність формоутворення при обробці шліфуванням: - проходити з постійною амплітудою; - досягати амплітудного значення на фіксованих кута х повороту вала. Винахід пояснюється кресленнями: фіг. 1 - загальний вигляд шпиндельного вузла для прецизійного шліфування (механічна частина); фіг. 2 - система управління і стабілізації руху вала шпиндельного вузла для надглибокого прецизійного шліфування (збільшена функціональна схема); фіг. 3 - еквівалентна схема шпиндельного вузла для надглибокого прецизійного шліфування; фіг. 4 - функціональна схема руху вала шпиндельного вузла, що пропонується; фіг. 5 - схема прив'язки примусової прецесії осі обертання вала і осьових коливань вала до кутів повороту вала шпиндельного вузла, що пропонується; фіг. 6 - часова діаграма роботи блока формування примусової прецесії осі обертання вала шпиндельного вузла; фіг. 7 - часова діаграма роботи блока стабілізації амплітуди осьових коливань вала; фіг. 8 - часова діаграма роботи блока формування і стабілізації амплітуди осьових коливань вала шпиндельного вузла для надглибокого прецизійного шліфування; фіг. 9 - конус прецесії осі обертання вала шпиндельного вузла для надглибокого прецизійного шліфування; фіг. 10 - епюри вихідних напруг вимірників положень вала; 5 28729 В чотирьох пазах 18 пружної радіальної опори 3, осі симетрії яких співпадають з осями х і у (фіг. 1, 4) системи координат XOY, початок якої також лежить на осі симетрії внутрішньої поверхні корпусу 1, між регульовочними гвинтами 21 і пружинами 20 встановлені упорні шайби 23 і п'єзостовпи 24. П'єзостовпи 24 призначені для регулювання тиску башмаків 19 на вал 2 (через проміжний радіальний підшипник 4) шляхом збільшення або зменшення їх довжин подачею на них напруг різної полярності. Причому, паз 18 з розміщеним в ньому башмаком 19, пружиною 20, упорною шайбою 23, п'єзостовпом 24, регульовочним гвинтом 21 утворюють пружний елемент з регулюємою силою тиску пружної радіальної опори 3. Осьова аеростатична опора включає рухомий вузол, складений з виконаних окремо вала 25 осьової аеростатичної опори 7 і п'яти 6, при цьому п'ята 6 встановлена на валу 25 осьової опори 7 з можливістю зміни нахилу площини п'яти 6 до осі обертання вала 25 шляхом закріплення на валу 25 сферичного сегмента 26 за допомогою пружинних пристроїв, рівномірно зміщених в окружному напрямі, наприклад, трьох, складених з корпусу пружного пристрою 27, в якому розміщені гвинт 28, який взаємодіє з пружиною пружного пристрою 29, встановленого в напрямній 30, котра опирається на упорну кульку 31. Можливі різні конструктивні рішення для підтиснення п'яти 6 до валу 25, що відноситься до звичайного проектування для забезпечення збірки пристрою. З двох боків п'яти 6 з зазорами відносно неї встановлені правий підп'ятник 16 та лівий підп'ятник 32 з виконаними в них жиклерами 33 подачі газу у зазори осьової аеростатичної опори 7. В частині жиклерів 33 подачі газу обох підп'ятників 16 та 32 встановлені регуляторами 34 тиску газу для штучного створення додаткового тиску на п'яту 6 в осьовому напрямку незалежно від положення цієї п'яти 6 відносно підп'ятників 16 та 32. Кожен регулятор 34 тиску газу має п'єзоелектричний двигун 35, на якому закріплена регулювальна голка 36, встановлена співвісно з жиклером 33 подачі газу, причому п'єзоелектричний двигун 35 з регулювальною голкою 36 через направляючу шайбу 37 пружиною 38 регулятора тиску пружно підтиснуті до регульовочного гвинта 39 регулятора тиску, призначеного для відліку начального значення тиску на ви ході жиклера 33 подачі газу. Кожен регулятор 34 тиску газу має корпус 40 регулятора тиску. Кульова опора 5 пружно підтиснута до основи 14 за допомогою шайби 41, пружини 42 шарової опори та гвинта 43. Вал 25 осьової аеростатичної опори 7 розміщений у дво х радіальних підшипниках 44, які в свою чергу, розміщені у шліцевій втулці 45, нерухомий елемент 46 якої жорстко зв'язаний з корпусом 1 шпиндельного вузла. При шліфуванні використовувався шлі фувальний круг 47. Система 8 управління і стабілізації руху вала 2 шпиндельного вузла надглибокого прецизійного шліфування (фіг. 2) містить такі елементи: блок 48 стабілізації положення конуса прецесії осі обертання вала 2, призначеного для стабілізації у просторі положення конуса прецесії осі обертання вала 2 під впливом на нього зовнішнього наванта ження; блок 49 формування примусової прецесії осі обертання вала 2, призначений для прив'язки початку та закінчення примусової прецесії осі обертання вала 2 на кожному оберті вала 2 в напрямку півосей +О2Y2 і -О2Y2 системи координат X2О 2 Y2 до границь D-околів площини g максимальної зміни орієнтації шліфувального круга 47 відносно оброблюваної деталі та начальної установки величини на амплітуду цієї примусової прецесії, що потрібна. Блок 50 стабілізації амплітуди примусової прецесії осі обертання вала 2 призначений для запобігання у процесі шліфування відхилень поточного значення амплітуди примусової прецесії Aп.п від установленого значення; блок 51 формування та стабілізації амплітуди осьових коливань вала 2 призначений для начальної установки заданої величини амплітуди осьових коливань вала 2, прив'язки початків та закінчень кожного з двох осьових коливань вала 2 в напрямку деталі, що оброблюється до границь D-околів площини b змінення орієнтації шліфувального круга 47 відносно деталі, що обробляється, запобігання в процесі шліфування відхилення поточного значення амплітуди осьових коливань Ао від встановленого значення, а також стабілізації положення у просторі площини відліку амплітуди осьових коливань вала 2. Блок 48 стабілізації положення конуса прецесії осі обертання вала 2 включає: перший вимірювач 52 та др угий вимірювач 53, призначені для виміру величини зміщення вала 2 по осях х1 і у1, системи координат Х1О 1 Y1 за сигналами датчиків 9 та 10 положення вала 2, відповідно; перший інтегратор 54 та другий інтегратор 55 призначені для виділення постійних складових Uп.c.x1 і Uп.c.y1 вихідних напруг Uвим.х1 та Uвим.у1 першого вимірювача 52 та другого вимірювача 53, відповідно, які однозначно визначають положення конуса прецесії осі обертання вала 2 відносно датчиків 9 та 10 положення вала 2. Перемикач 56 "опорне - робота" використовується для переключення виходів першого та другого інтеграторів 54 і 55 до першого аналогоцифрового перетворювача 57 і другого аналогоцифрового перетворювача 58, відповідно, в положення "опорне" або до першого входу першого диференціального підсилювача 59 і другого диференціального підсилювача 60 в положення "робота". Перший диференціальний підсилювач 59 і другий диференціальний підсилювач 60 призначені для формування сигналів управління на пружні елементи з регульованою силою тиску пружної радіальної опори 3, розміщеної по осях "х" і "у" системи координат XOY (фіг. 4) для стабілізації положення конуса прецесії осі обертання вала 2 по осі "х" і по осі "у". Перша кнопка 61 "старт" та джерело постійної напруги (на фіг. 4 позначено стрілкою ¬) потрібні для запуску першого та другого аналого-цифрових перетворювачів 57, 58. Перша схема 62 клапанів та друга схема 63 клапанів призначені для запису опорних напруг Uoп.x1, та Uoп.y1 , як рівні Uп.c.x1 і Uп.c.y1, відповідно, при незміщених положеннях конуса прецесії осі обертання вала 2 в перший регістр 64 і другий регістр 65. 6 28729 Перший регістр 64 і другий регістр 65 призначені для збереження двоїчних кодів Uoп.x1 і Uoп.y1. Перший цифро-аналоговий перетворювач 66 і другий цифро-аналоговий перетворювач 67 призначені для перетворення двоїчних кодів напруг Uoп.x1 і Uoп.y1 в опорні напруги Uoп.x1 і Uoп.y1, що подаються на другі входи першого диференціального підсилювача 59 і другого диференціального підсилювача 60. Перший суматор 68 призначений для формування результуючого сигналу управління на пружні елементи з регулюємою силою тиску, пружної радіальної опори 3, розміщених по осі "у" системи координат XOY. Алгебраїчний суматор електричних аналогових сигналів може використовуватись як суматор 68. (Див. Ялшиев А.У. та ін. "Багатофункціональні регулюючі пристрої автоматики", М.: "Ма шинобудування", 1981 p.). Третій вимірювач 69 та четвертий 70 призначені для виявлення моменту часу підходу передньої грані лиски під датчик 11 величини примусової прецесії осі обертання вала 2 по півосі +О2Y2 та моменту часу підходу передньої грані лиски під датчик 12 величини примусової прецесії осі обертання вала 2 по півосі -О2Y2 системи координат X2О2 Y2, відповідно, а також для формування стрибків напруг на їх виходах, термін яких дорівнює відрізку часу від моменту входу передньої грані лиски під датчики до моменту часу ви ходу задньої грані лиски (в напрямку обертання) з-під цих датчиків. Блок 49 формування примусової прецесії осі обертання вала 2 включає: Перший пороговий пристрій 71 і другий пороговий пристрій 72 призначені для виділення (фіг. 6) імпульсу "лиски" (стрибка напруги) з ви хідної напруги Uвим.-у2 третього вимірювача 69 та із вихідної напруги Uвим.+у2 четвертого вимірювача 70; Перший диференційний ланцюжок 73 і другий диференційний ланцюжок 74, що виконують диференціювання імпульсів "лиски" з виходів першого і друго го порогових пристроїв 71 і 72 відповідно. Перший і другий діодні обмежувачі 75, 76 призначені для запуску першого очікуючого мультивібратора 77 і другого очікуючого мультивібратора 78, позитивними імпульсами відповідаючими переднім фронтам імпульсів "лиски". Очікуючі мультивібратори 77, 78 генерують прямокутні імпульси (фіг. 6) передні фронти яких співпадають з передніми фронтами імпульсів "лиски", відповідні моментам часу початку примусової прецесії осі обертання вала по півосях +О2 Y2 і -О2 Y2 (фі г. 4) (моменту часу підходу вектора F D до D-околу площини g), а їх тривалість визначає тривалість часу примусової прецесії, що установлюється експериментально. Перший підсилювач 79 і другий підсилювач 80 забезпечують формування напруг на п'єзостовпи 24 пружних елементів з тиском, що регулюється, розміщених на осі "у" системи координат XOY, тривалість яких дорівнює тривалості імпульсів очікуючих мультивібраторів 77, 78, а амплітуда регулюється і визначає амплітуду примусової прецесії осі обертання вала 2 шпиндельного вузла для прецизійного шліфування. Блок 50 стабілізації амплітуди примусової прецесії осі обертання вала 2 включає два ідентичних субблока (фіг. 4): субблок 81 стабілізації амплітуди примусової прецесії по півосі +О2Y2 і субблок 82 стабілізації амплітуди примусової прецесії по півосі О2 Y2, кожний з яких включає: Третій очікуючий мультивібратор 83, і четвертий очікуючий мультивібратор 84, відповідно, призначені для затримки формування опорних напруг Uoп.п.п.(+y2) і Uoп.п.п.(-у2) на час, який дорівнює терміну їх імпульсів (фіг. 7) або інакше на час досягнення максимумів амплітудами примусових прецесій по півосях +О2 Y2 і -О2 Y2 відносно їх початків. Третій диференціюючий ланцюжок 85 і четвертий диференціюючий ланцюжок 86, третій діодний обмежувач 87 субблока 81 і четвертий діодний обмежувач 88 субблока 82 призначені для формування коротких негативних імпульсів (фіг. 7), співпадаючих із задніми фронтами імпульсів мультивібраторів очікуючих мультивібраторів 83 і 84. Перший очікуючий блокінг-генератор 89 і другий очікуючий блокінг-генератор 90 призначені для генерування коротких імпульсів, що поступають на перший ключ 91 і другий ключ 92, відповідно, для підключення виходів першого порогового пристрою 71 і другого порогового пристрою 72 до входів третього аналого-цифрового перетворювача 93 (АЦП93) і четвертого аналого-цифрового перетворювача 94 (АЦП94), призначених для перетворювання напруг відповідних амплітудам примусової прецесії по осях +О2Y2 і -О2Y2, відповідно, у цифрові двоїчні коди, а також для запуску третього АЦП93 і четвертого АЦП94. Третя схема клапанів 95 і четверта схема клапанів 96 призначені для підключення за сигналами готовності третього АЦП 93 і четвертого АЦП94 входів ци х АЦП93 і АЦП94 до третього регістру 97 і четвертого регістру 98, відповідно. Третій регістр 97 і четвертий регістр 98 призначені для зберігання кодів напруг амплітуд примусової прецесії по півосях +О2Y2 і -О2 Y2, відповідно. Третій цифро-аналоговий перетворювач 99 (ЦАП99) і четвертий цифро-аналоговий перетворювач 100 (ЦАП100) призначені для перетворювань двійкових кодів амплітуд примусової прецесії по півосях +О2Y2 і -О2 Y2 в опорні напруги Uoп.п.п.(у2) і Uоп.п.п.(-у2) відповідні амплітудам примусової прецесії осі обертання вала 2 по цих осях системи координат Х2 О2 Y2. Третій ключ 101 і четвертий ключ 102 призначені для підключення до перших входів третього диференційного підсилювача 103 і четвертого диференційного підсилювача 104, відповідно, опорних напруг Uoп.п.п.(+у2) і Uoп.п.п.(-y2) примусової прецесії осі обертання вала 2 з виходів ЦАП99 і ЦАП 100, а п'ятий ключ 105 і шостий ключ 106 забезпечують підключення до другого входу підсилювачів 103 і 104 напруг з виходів порогових пристроїв 71 і 72, відповідаючих поточним значенням величин примусової прецесії по півосях +О2 Y2 і -О2 Y2 , відповідно. Перший інвертор 107 і другий інвертор 108 призначені для інвертування коротких негативних імпульсів диференціюючих ланцюжків 73 і 74, відповідно, що поступають на перевертання першого 7 28729 і другого тригерів 109 і 110 субблоків 81 і 82, відповідно. Перший тригер 109 і другий тригер 110 призначені для генерування за імпульсами диференціюючих ланцюжків 73 і 74, відповідно, імпульсів, відчиняючих ключі 101, 102, 105, 106, передні і задні фронти яких співпадають з початками і закінченнями примусової прецесії по півосях +О2 Y2 і -О2Y2 . Таким чином, стабілізація амплітуди прецесії осі обертання вала 2 здійснюється двічі за один оборот вала 2 на відрізках часу, рівних терміну імпульсу "лиски" на ви ході порогових пристроїв 71 і 72. Блок 51 формування і стабілізації амплітуди осьових коливань вала 2 включає три субблоки (фіг. 4): субблок 111 формування осьових коливань вала 2; субблок 112 стабілізації положення площини відліку амплітуди осьових коливань вала 2; субблок 113 стабілізації амплітуди осьових коливань вала 2. Субблок 111 формування осьових коливань вала 2 включає: п'ятий очікуючий мультивібратор 114, призначений для генерування прямокутних імпульсів, передні фронти яких співпадають з моментом часу (фіг. 5) суміщення вектора динамічного навантаження F D з границями D-околів площини b змінення орієнтацій шліфувального круга. Таким чином, задні фронти імпульсів визначають моменти часу початків двох осьових коливань вала 2 за одне обертання. П'ятий диференціюючий ланцюжок 115 і п'ятий діодний обмежувач 116 призначені для формування короткого імпульсу, співпадаючого із заднім фронтом імпульсу мультивібратора 114, що поступає на запуск шостого очікуючого мультивібратора 117. Шостий очікуючий мультивібратор 117 призначений для генерування прямокутних імпульсів, тривалість яких дорівнює тривалості одного осьового коливання вала 2, причому задній фронт цього імпульсу відповідає закінченню осьового коливання вала 2 і співпадає з моментами часу суміщення вектора F D з площиною b (фіг. 5); Третій підсилювач 118 призначений для підсилення імпульсів мультивібратора 117, а отже для встановлення потрібної амплітуди осьових коливань вала 2. Таким чином, субблок 111 забезпечує прив’язку осьових коливань вала 2 до фіксованих кутів його обертання. Субблок 112 стабілізації площини відліку амплітуди осьових коливань вала 2 включає: п'ятий вимірювач 119, призначений для виміру величини осьового зміщення вала 2 згідно з сигналом датчика 13 величини осьового зміщення вала 2; шостий вимірювач 120, призначений для виміру величини осьового коливання вала 2 згідно з сигналом датчика 15 величини осьового коливання вала 2; третій пороговий пристрій 121 призначений для виділення (фіг. 8) сигналу осьового коливання вала 2 з вихідного сигналу шостого вимірювача 120, другий суматор 122 призначений для виключення з вихідного сигналу п'ятого вимірюва ча 119 сигналу осьового коливання вала 2, а отож для виключення його впливу на положення площини відліку амплітуди осьових коливань вала 2; третій інтегратор 123, призначений для виділення постійної складової вихідної напруги другого суматора, яка визначає осьове положення вала 2; Перемикач 124 "стабілізація-опорне" призначений для перемикання виходу третього інтегратора 123 в положення "опорне" до входу п'ятого аналого-цифрового перетворювача 125 (АЦП125), а в позиції "стабілізація" - до входу п'ятого диференційного підсилювача 126. П'ятий аналого-цифровий перетворювач 125 призначений для перетворювання у цифровий двійковий код вихідної напруги третього інтегратора 123. П'ята схема клапанів 127 призначена для запису у п'ятий регістр 128 за сигналом готовності АЦП125 цифрового двійкового коду опорної напруги з ви ходу АЦП125, де цей код зберігається; П'ятий цифро-аналоговий перетворювач 129 призначений для перетворювання двійкового коду опорної напруги в опорну напругу, відповідну незміщеній позиції площини відліку амплітуди осьових коливань вала; 130 - джерело постійної напруги. Друга кнопка "старт" 131 призначена для запуску п'ятого аналого-цифрового перетворювача 125. Субблок 113 стабілізації амплітуди осьових коливань вала 2 включає: сьомий очікуючий мультивібратор 132, призначений для затримки формування коду опорної напруги Uoп.о.к. відносно початку осьового коливання вала, відповідного заданій амплітуді осьових коливань Ао.к. протягом часу (фіг. 5), потрібного для повороту вектора динамічного навантаження F D на кут D/2 від границі D-околу площини b до площини b; шостий диференціюючий ланцюжок 133 і шостий діодний обмежувач 134 призначені для отримання короткого імпульсу, визначаючого момент часу початку формування коду Uoп.о.к.; третій очікуючий блокінг-генератор 135 призначений для формування імпульсу запуску шостого аналого-цифрового перетворювача 136 (АЦП136) і відмикання сьомого ключа 137, забезпечуючого підключення порогового пристрою 121 до входу АЦП136; п'ята схема клапанів 138 призначена для запису у шостий регістр 139 цифрового двійкового коду Uoп.о.к., забезпечуючого зберігання коду Uoп.o.к.; шостий цифро-аналоговий перетворювач 140 (ЦАП140) призначений для перетворювання цифрового двійкового коду Uoп.o.к. на опорну напругу для стабілізації осьових коливань; восьмий ключ 141 і дев'ятий ключ 142 призначені для підключення до першого входу шостого диференційного підсилювача 143 опорної напруги Uoп.o.к., а до його другого входу - ви хідну напругу третього порогового пристрою 121, відповідаючого поточному значенню амплітуди осьових коливань вала 2; 8 28729 шостий диференційний підсилювач 143 призначений для формування сигналу управління на п'єзостовпи 24 регуляторів 34, пропорційного величині відхилення поточного значення амплітуди коливань її заданого значення Ао.к.; сьомий диференціюючий ланцюжок 144, другий інвертор 145 і третій тригер 146 призначені для підключення ЦАП140 і третього порогового пристрою 121 до шостого диференційного підсилювача на термін кожного осьового коливання вала 2; перемикач 147 "настройка" забезпечує відключення тригера 146 в процесі настройки пристрою; третя кнопка 148 "опорне" забезпечує запуск схеми формування опорної напруги. На фіг. 4 також позначені елементи: перемикачі 149-152, призначені для відключення блока 49 формування примусової прецесії і блока 50 стабілізації амплітуди примусової прецесії від блока 48 стабілізації конуса прецесії до осі обертання вала 2 в процесі настройки пристрою; розділювальні діоди 153-154 забезпечують розв'язку виходів першого і другого діодних обмежувачів 75-76; 155 - "лиска", що виконана на валу 2 під датчиками 11-12 величини примусової прецесії осі обертання вала 2; 156-157 - перемикачі для відключення від блока 50 першого і другого диференціюючого ланцюжків 73 і 74; перша кнопка 158 "опорне" і друга кнопка 159 "опорне" забезпечують запуск схем формування опорних напруг Uoп.п.п.(+y2) і Uoп.п.п.(-y2), що відповідають заданим значенням амплітуди примусової прецесії по півосях +О2 Y2 і -О2 Y2. Причому датчик 9 положення вала 2 по осі х1 з'єднаний з першим вимірювачем 52, вихід першого вимірювача 52 за допомогою перемикача 56 "опорне-робота" в позиції "опорне" з'єднаний з інформаційним входом першого аналого-цифрового перетворювача 57, джерело постійної напруги за допомогою першої кнопки 61 "старт" з'єднаний з сигнальними входами першого аналого-цифрового перетворювача 57 і другого аналого-цифрового перетворювача 58, інформаційний вихід першого аналого-цифрового перетворювача 57 з'єднаний з інформаційним входом першої схеми 62 клапанів, а його сигнальний вихід з'єднаний з сигнальним входом першої схеми 62 клапанів, а її ви хід з'єднаний із входом першого регістра 64, а його вихід з'єднаний із входом першого цифро-аналогового перетворювача 66, вихід цифро-аналогового перетворювача 66 з'єднаний з другим входом першого диференційного підсилювача 59, вихід першого інтегратора 54 за допомогою перемикача 56 "опорне-робота" в позиції "робота" з'єднаний з першим входом диференційного підсилювача 59, а його виходи з'єднані з п'єзостовпами 24 пружних елементів з регульованим тиском, встановленими по осі х системи координат XOY, датчик 10 положення вала осі у1 з'єднаний з другим вимірювачем 53, а його вихід з'єднаний зі входом другого інтегратора 55, вихід др угого інтегратора 55 через перемикач 56 "опорне-робота" в позиції "опорне" з'єднаний з інформаційним входом другого аналого цифрового перетворювача 58, а його інформаційний вихід з'єднаний з інформаційним входом другої схеми 63 клапанів, а сигнальний вихід з'єднаний з сигнальним входом схеми 63 клапанів, вихід схеми 63 клапанів з'єднаний з входом другого регістра 65, а його вихід з'єднаний з входом другого цифро-аналогового перетворювача 67, а його вихід з'єднаний з другим входом другого диференційного підсилювача 60, вихід другого інтегратора 55 за допомогою перемикача 56 "опорнеробота" в позиції "робота" з'єднаний з першим входом другого диференційного підсилювача 60, а його входи з'єднані зі входами першого суматора 68, виходи першого суматора 68 з'єднані з п'єзостовпами 24 пружних елементів з регульованою силою тиску, встановлених по осі "у" системи координат XOY, датчик 11 величини примусової прецесії осі обертання вала 2 по півосі +О2Y2 з'єднаний з третім вимірювачем 69, а його вихід з'єднаний із входом першого порогового пристрою 71, а його вихід з'єднаний із входом першого диференціюючого ланцюжка 73, з інформаційним входом першого ключа 91, з інформаційним входом п'ятого ключа 105, вихід першого диференціюючого ланцюжка 73 через перемикач 157 з'єднаний із входом першого інвертора 107, із входом першого тригера 109 та із входом першого діодного обмежувача 75, а його вихід з'єднаний з розподільним діодом 153, з першою кнопкою 167 "опорне", із входом першого очікуючого мультивібратора 77, а його вихід з'єднаний із входом першого підсилювача 79, виходи першого підсилювача 79 через перемикач 151 з'єднаний зі входами першого суматора 68, датчик 12 величини примусової прецесії осі обертання вала 2 по півосі -О2Y2 з'єднаний з четвертим вимірювачем 70, а його вихід з'єднаний із входом другого порогового пристрою 72, вихід другого порогового пристрою 72 з'єднаний з інформаційним входом другого ключа 92, з інформаційним входом шостого ключа 106 із входом другого диференційного ланцюжка 74, а його вихід з'єднаний із входом другого інвертора 108, із входом другого тригера 110 та із входом друго го діодного обмежувача 76, а його вихід через розподільний діод 154 з'єднаний із входом п'ятого очікуючого мультивібратора 114, з другою кнопкою 168 "опорне" і з входом другого очікуючого мультивібратора 78, а його вихід з'єднаний із входом другого підсилювача 80, а його виходи через перемикач 152 з'єднані із входами першого суматора 68, перша кнопка 167 "опорне" з'єднана із входом третього очікуючого мультивібратора 83, а його вихід з'єднаний із входом третього диференціюючого ланцюжка 85, вихід третього диференціюючого ланцюжка 85 з'єднаний із входом третього діодного обмежувача 87, вихід третього діодного обмежувача 87 з'єднаний із входом першого очікуючого блокінг-генератора 89, а його вихід з'єднаний з сигнальним входом першого ключа 91 та із сигнальним входом третього аналого-цифрового перетворювача 93, вихід першого ключа 91 з'єднаний з інформаційним входом третього аналого-цифрового перетворювача 93, сигнальний вихід третього аналого-цифрового перетворювача 93 з'єднаний із сигнальним входом третьої схеми клапанів 95, а його інформаційний вихід з'єднаний з інформаційним входом третьої схеми клапанів 95, а її ви хід 9 28729 з'єднаний із входом третього регістру 97, вихід третього регістру 97 з'єднаний із входом третього цифро-аналогового перетворювача 99, а його вихід з'єднаний з інформаційним входом третього ключа 101, вихід першого інвертора 107 з'єднаний із входом першого тригера 109, а його вихід з'єднаний із сигнальними входами третього ключа 101 і п'ятого ключа 105, вихід третього ключа 101 з'єднаний із першим входом третього диференційного підсилювача 103, вихід п'ятого ключа 105 з'єднаний з другим входом третього диференційного підсилювача 103, а його виходи з'єднані з входами першого суматора 68, друга кнопка 168 "опорне" з'єднана із входом четвертого очікуючого мультивібратора 84, а його вихід з'єднаний із входом четвертого диференціюючого ланцюжка 86, вихід четвертого диференціюючого ланцюжка 86 з'єднаний із входом четвертого діодного обмежувача 88, а його вихід з'єднаний із входом другого очікуючого блокінг-генератора 90, вихід др угого очікуючого блокінг-генератора 90 з'єднаний із сигнальними входами другого ключа 92 та четвертого аналогоцифрового перетворювача 94, сигнальний вихід четвертого аналого-цифрового перетворювача 94 з'єднаний із сигнальним входом четвертої схеми 96 клапанів, а його інформаційний вихід з'єднаний із інформаційним входом четвертої схеми 96 клапанів, вихід четвертої схеми 96 клапанів з'єднаний із входом четвертого регістру 98, а його вихід з'єднаний із входом четвертого цифро-аналогового перетворювача 100, вихід четвертого цифро-аналогового перетворювача 100 з'єднаний з інформаційним входом четвертого ключа 102, а його вихід з'єднаний із першим входом четвертого диференційного підсилювача 104, а його виходи з'єднані з входами першого суматора 68, вихід другого інвертора 108 з'єднаний із входом другого тригера 110, а його вихід з'єднаний із сигнальними входами четвертого ключа 102 і шостого ключа 106, вихід п'ятого очікуючого мультивібратора 114 з'єднаний із входом п'ятого диференціюючого ланцюжка 115, а його вихід з'єднаний із входом п'ятого діодного обмежувача 116, вихід п'ятого діодного обмежувача 116 через третю кнопку 148 "опорне" з'єднаний із входом сьомого очікуючого мультивібратора 132 та із входом шостого очікуючого мультивібратора 117, а його вихід з'єднаний із входом сьомого диференціюючого ланцюжка 144 і із входом третього диференційного підсилювача 118, вихід третього диференційного підсилювача 118 з'єднаний із входом третього суматора 130, датчик 13 осьового положення вала з'єднаний із п'ятим вимірювачем 119, вихід п'ятого вимірювача 119 з'єднаний із входом другого суматора 122, датчик 15 величини осьового коливання вала 2 з'єднаний із шостим вимірювачем 120, вихід шостого вимірювача 120 з'єднаний із входом третього порогового пристрою 121, а його вихід - з інформаційними входами сьомого ключа 137 і дев'ятого ключа 142, а також - із входом другого суматора 122, вихід другого суматора 122 з'єднаний із входом третього інтегратора 123, а його вихід через перемикач 124 "стабілізація-опорне" в позиції "опорне" з'єднаний з інформаційним входом п'ятого аналого-цифрового перетворювача 125, джерело постійної напруги 130 через другу кнопку 131 "старт" з'єднаний із сигнальним входом п'я того аналого-цифрового перетворювача 125, сигнальний і інформаційний виходи п'ятого аналогоцифрового перетворювача 125 з'єднані із сигнальним і інформаційними входами п'ятої схеми 127 клапанів, відповідно, вихід п'ятої схеми 127 клапанів з'єднаний із входом п'ятого регістру 128, а його вихід з'єднаний із входом п'ятого цифро-аналогового перетворювача 129, вихід п'ятого цифроаналогового перетворювача 129 з'єднаний із першим входом п'ятого диференційного підсилювача 126, вихід третього інтегратора 123 через перемикач 124 "стабілізація-опорне" в позиції "стабілізація" з'єднаний із другим входом п'ятого диференційного підсилювача 126, а його виходи з'єднані із входом третього суматора 130, вихід сьомого очікуючого мультивібратора 132 з'єднаний із входом шостого диференціюючого ланцюжка 133, а її вихід з'єднаний із входом шостого діодного обмежувача 134, вихід шостого діодного обмежувача 134 з'єднаний із входом третього очікуючого блокінг-генератора 135, а його вихід з'єднаний із сигнальними входами сьомого ключа 137 і шостого аналого-цифрового перетворювача 136, вихід сьомого ключа 137 з'єднаний з інформаційним входом шостого аналого-цифрового перетворювача 136, а його сигнальний і інформаційний виходи з'єднані із сигнальним та інформаційним входом п'ятої схеми клапанів 138, відповідно, а її вихід з'єднаний із входом шостого регістра 139, вихід шостого регістра 139 з'єднаний з входом шостого цифро-аналогового перетворювача 140, а його вихід з'єднаний із інформаційним входом восьмого ключа 141, а його вихід з'єднаний з першим входом шостого диференційного підсилювача 143, вихід сьомого диференціюючого ланцюжка 144 з'єднаний з входом другого інвертора 145 і з входом третього тригера 146, вихід другого інвертора 145 з'єднаний з входом третього тригера 146, а його вихід через перемикач 147 "настройка" з'єднаний з сигнальними входами восьмого ключа 141 і дев'ятого ключа 142, вихід дев'ятого ключа 142 з'єднаний з другим входом шостого диференційного підсилювача 143, а його виходи з'єднані з входами третього суматора 130, виходи третього суматора 130 з'єднані з п'єзостовпами 35 регуляторів 34 тиску. На фіг. 2 показано збільшену блок-схему системи управління і стабілізації руху вала 2 шпиндельного вузла для надглибокого прецизійного шліфування, що містить блок 48 стабілізації положення конуса прецесії осі обертання вала 2, блок 49 формування примусової прецесії осі обертання вала 2, блок 50 стабілізації амплітуди примусової прецесії осі обертання вала 2, блок 51 формування і стабілізації амплітуди осьових коливань вала 2. Причому, датчик 9 положення вала по осі х1 системи координат X1O 1 Y1 з'єднаний з третім входом блока 48 стабілізації положення прецесії осі обертання вала 2, датчик 10 положення вала по осі у1 системи координат X1 O1 Y1 з'єднаний з другим входом блока 48 стабілізації положення конуса прецесії обертання вала 2, датчик 11 величини примусової прецесії осі обертання вала 2 по півосі +О2Y2 системи координат Х2О 2 Y2 з'єднаний з дванадцятим входом блока 48 стабілізації положення конуса прецесії осі обертання вала 2, дат 10 28729 чик 12 величини примусової прецесії осі обертання вала по півосі -О2 Y2 з'єднаний з першим входом блока 48 стабілізації положення конуса прецесії осі обертання вала 2, перший і другий виходи блока 48 стабілізації положення конуса прецесії осі обертання вала 2 з'єднані з п'єзостовпами 24 пружних елементів з регульованою силою тиску, встановлених по осі "у" системи координат XOY, а його третій і четвертий виходи з'єднані з п'єзостовпами пружних елементів з регульованою силою тиску, встановлених по осі "х" системи координат XOY, п'ятий і шостий виходи блока 48 стабілізації положення конуса прецесії осі обертання вала 2 з'єднані з першим і другим входами блока 49 формування примусової прецесії осі обертання вала 2, відповідно, а п'ятий, шостий, сьомий і восьмий виходи блока 49 формування примусової прецесії осі обертання вала 2 з'єднані з шостим, сьомим, четвертим і п'ятим входами блока 48 стабілізації положення конуса прецесії осі обертання вала 2, відповідно, перший, другий, третій і четвертий виходи блока 49 формування примусової прецесії осі обертання вала 2 з'єднані з першим, четвертим, другим і третім входами блока 50 стабілізації амплітуди примусової прецесії осі обертання вала 2, відповідно, а його перший, другий, третій і четвертий виходи з'єднані з восьмим, дев'ятим, десятим і одинадцятим входами блока 48 стабілізації положення конуса прецесії осі обертання вала 2, відповідно, дев'ятий і десятий виходи блока 49 формування примусової прецесії осі обертання вала 2 з'єднані з п'ятим і шостим входом блока 50 стабілізації амплітуди примусової прецесії осі обертання вала 2, відповідно, а через розподільні діоди 153 і 154 з'єднані з першим входом блока 51 формування і стабілізації амплітуди осьових коливань вала 2, датчик 13 осьового положення вала 2 з'єднаний з третім входом, датчик 15 величини осьового коливання вала 2 з'єднаний з другим входом, а п'єзоелектричні двигуни 35 регуляторів 34 тиску газу з'єднані з першим і другим виходами блока 51 формування і стабілізації амплітуди осьових коливань вала 2. Робота шпиндельного вузла надглибокого прецизійного шліфування проводиться таким чином. Спочатку встановлюють кут jп.п. між направленням вектора F D динамічної нагрузки і передньою гранню лиски 154. Це необхідно тому, що прив'язка інтервалів часу створення примусової прецесії осі обертання вала 2 і осьових коливань вала 2 до фіксованих кутів повороту вала 2 здійснюється відносно кутів повороту вала 2, на яких передня грань лиски 154 підходить до датчиків 11 і 12 величини примусової прецесії. Наприклад, якщо примусову прецесію (фіг. 5) в напрямку півосі +О2Y2 утворювати у границях кута D/2 у момент часу, коли кут між площиною g максимальної зміни орієнтації шліфувального круга 47 і вектором F D складає D/2, кут jп.п. (фіг. 5) між передньою гранню лиски 154 і вектором F D повинен складати jп.п.=p-D/2+jд/2, де jд - кутовий розмір датчиків 11, 12. Нагадуємо, що примусова прецесія осі обертання вала 2 у загальному випадку здійснюється на відрізках часу, протягом яких вектор F D знаходиться в D-околах площини g, а осьові коливання вала 2 здійснюються у моменти часу, протягом яких вектор F D знаходиться в D-околах площини b змінення орієнтації шліфувального круга 47. Далі, не змінюючи напрямок вектора F D (не змінюючи кут jп.п.), змінюють ексцентриситет вала 2 "е" так, щоб вісь обертання вала 2 прецесувала з заданим кутом a потр. при вершині конуса прецесії (фіг. 9). На цьому підготовка прецизійного шпиндельного вузла закінчується. Стабілізація положення конуса прецесії осі обертання вала 2 блоком 48 стабілізації положення конуса прецесії здійснюється таким чином. Задають валу 2 обертання з номінальною швидкістю W1 і перемикачами 149-152 вимикають блок 49 формування примусової прецесії осі оберту вала 2 і блок 50 стабілізації амплітуди примусової прецесії осі обертання вала 2 від системи 8 управління і стабілізації вала 2. Вісь обертання вала 2 під впливом вектора динамічної нагрузки F D прецесує в пружній радіальній опорі з заданим кутом a потр. при вершині конуса прецесії. Напруги з виходів першого і других вимірювачів 52-53 (фіг. 10) передаються на входи першого і другого інтеграторів 54 і 55, відповідно. Вихідні напруги на виходах інтеграторів змінюються по закону: t æ ö Uвих. = -Uвх. × А × ç1 - е (1+ A ) Ti ÷, ç ÷ ç ÷ è ø де Ті - постійна часу інтегратора; А - коефіцієнт підсилення інтегратора в розімкненому стані. Постійну часу інтегратора Ті беруть такою, щоб при досягненні значень постійних складових Uвим.х1сер. і Uвим.у1сер. (фіг. 11, 12), що використовують в якості опорних напруг Uoп.x1 і Uoп.y1, вихідні напруги інтеграторів 54 і 55 за час t =Тв/4 (чверть періоду оберту вала 2) залишались постійними (фіг. 13, 14). Тоді Uoп.x1 і Uoп.y1 відповідатимуть початковому положенню конуса прецесії осі обертання вала 2, а напруги Uвим.х1сер. і Uвим.у1сер. змінюватимуться при зміщенні під впливом на вал 2 зовнішньої нагрузки Рш конуса прецесії осі обертання відносно датчиків 9 і 10 (фіг. 15). Перемикач 56 "опорне-робота" (фіг. 4) встановлюють в положення "опорне" і підключають виходи інтеграторів 54 і 55 до входів першого і другого аналого-цифрових перетворювачів 57 і 58, відповідно. Натискують першу кнопку 61 "старт". Напруга джерела постійної напруги в якості сигналу запуску поступає на входи АЦП57 і АЦП58. Напруги Uoп.x1 і Uoп.y1 по сигналу запуску перетворюються у цифровий двійковий код. У момент часу закінчення перетворення напруг Uoп.x1 і Uoп.y1 АЦП57 і АЦП58 виробляють сигнали готовності, що поступають на першу і другу схеми клапанів 62 і 63 і відчиняють їх. Двійкові коди напруг Uoп.x1 і Uoп.y1 поступають в перший і другий регістри 64 і 65, де запам'ятовуються, а на 11 28729 виходах, підключених до них першого і другого цифро-аналогових перетворювачів 66 і 67 в результаті перетворення кодів Uoп.x1 і Uoп.y1 з'являються напруги Uоп.х1 і Uoп.y1, відповідно, які поступають на другі входи першого диференційного підсилювача 59 і другого диференційного підсилювача 60. Блок 48 стабілізації положення конуса прецесії осі обертання вала 2 готовий до роботи. Перемикач 56 "опорне-робота" встановлюють у положення "робота" і вмикають виходи першого і другого інтеграторів 54 і 55 до перших входів першого і др угого ди ференційних підсилювачів 59 і 60, відповідно. Якщо в процесі шліфування під впливом сили Рш шлі фування конус прецесії осі обертання зміститься відносно датчиків 9 і 10 (фіг. 15), зміняться величини постійних складових Uвим.х1 і Uвим.у1 ви хідних напруг вимірювачів 52 і 53 на виходах інтеграторів 54 і 55 (фіг. 13, 14). На виходах диференційних підсилювачів 59 і 60 виникають різниці потенціалів Uвим.х1 і Uвим.y1 відповідно, пропорційні величинам зміщення конуса прецесії по осях х1 і у1 . Різниця потенціалів, що виникає між виходами першого диференційного підсилювача 59, накладається на п'єзостовпи 24 пружних елементів з регульованою силою тиску на вал 2, встановлених по осі "х" системи координат XOY, а різниця потенціалів, що виникає між входами другого диференційного підсилювача 60 через перший суматор 68 накладається на п'єзостовпи 24 пружних елементів з регульованою силою тиску на вал 2, встановлених по осі "у" системи координат XOY. Подовжуючись чи скорочуючись в залежності від знака накладеної різниці потенціалів, пружні елементи з регульованою силою тиску збільшують або зменшують тиск на вал 2 шпиндельного вузла. В результаті у процесі шліфування пружна радіальна опора 3 створює момент Mоп рівний за величиною і протилеж де jстр.=jд+2jл, jл - кутовий розмір ширини лиски 155. Крім того, передні фронти стрибків напруг (імпульсів лиски) відповідають моментам часу повороту вектора F D динамічної нагрузки на границі D-околів площини g. Отже, у часі початку примусової прецесії осі обертання вала 2 по півосях +О2 Y2 і -О 2 Y2 співпадають з передніми фронтами імпульсів лиски. Таким чином, примусова прецесія прив'язується до кутів повороту вала 2, на яких передня грань лиски 155 підходить до датчиків 11 і 12. Для виділення імпульсів лиски вихідні напруги вимірювачів 69 і 70 передаються на перший пороговий пристрій 71 і другий пороговий пристрій 72 (фіг. 6, 71, 72), а з їх виходів імпульси лиски поступають на перший диференціюючий ланцюжок 73 і перший діодний обмежувач 75 - з порогового пристрою 71 і на другий диференціюючий ланцюжок 74 і другий діодний обмежувач 76 - з порогового пристрою 72. Як наслідок на виходах діодних обмежувачів 75 і 76 отримують короткі імпульси (фіг. 6, 73, 75), що визначають моменти часу початку створення примусової прецесії осі обертання вала 2 по півосях +О2 Y2 і -О2 Y2 , відповідно. З виходів діодних обмежувачів 75 і 76 короткі імпульси передаються на запуск першого очікуючого мультивібратора 77 і другого очікуючого мультивібратора 78, відповідно, генеруючих прямокутні імпульси, тривалість яких у даному прикладі реалізації системи 8 управління і стабілізації руху вала рівна часу повороту вектора F D на кут D/2 від границі D-околу площини g до площини g (фіг. 6, 77, 78). Загалом, тривалість цих імпульсів встановлюється експериментально. Імпульси мультивібратора 77 і 78 передаються на входи першого підсилювача 79 і другого підсилювача 80, а з їх виходів через перший суматор 68 на п'єзостовпи 24 пружних елементів з регульованою силою тиску встановлених по півосі у системи координат XOY, підключених до суматора 68 у протифазі. Як наслідок, пружна опора 3 двічі за один оберт вала 2, коли вектор F D знаходиться у секторах від границі D-околу площини g до півосі +у2 створює додатковий тиск на вал 2 у напрямку півосі -О2 Y2, а в секторі від границі D-околу площини g до півосі -у2 (фіг. 5) у напрямку півосі +О2 Y2 . Такий напрямок примусової прецесії вибрано для того, щоб вона співпадала з напрямком самовільної прецесії осі обертання вала 2 через зміну орієнтації шліфувального круга відносно деталі з амплітудою Ас.п.ор. (фіг. 11, Ас.п.ор.). Як видно з епюри напруги Uвим.у1 на виході вимірювача 53 (фіг. 11) прецесія осі оберту вала 2 у напрямку півосей +О2Y2 і -О2Y2 з однаковими амплітудами Ап.п.у1 призводить до симетричного відносно середнього значення вихідної напруги вимірювача 53 Uвим.у1 приросту амплітуди напруги Uвим.у1, а отже не змінює Uвим.у1сер.,а тому не впливає на положення конуса прецесії осі обертання вала 2, тобто не змінює його положення. Встановлюють величину амплітуди примусової прецесії Ап.п. за приростом амплітуди імпульсу ний за направленням моменту Mш сили шліфування і запобігає зміщенню конуса прецесії відносно датчиків 9 і 10 положення вала 2. Робота блока 49 формування амплітуди примусової прецесії осі обертання вала 2 по півосях +О2 Y2 і -О2Y2 (фіг. 4) здійснюється таким чином. Перемикачами 151 і 152 підключають виходи першого і другого підсилювачів 79 і 80 до першого суматора 68. Сигнали датчика 11 величини примусової прецесії по півосі +О2Y2 і датчика 12 величини примусової прецесії по осі -О2Y2 перетворюються третім вимірювачем 69 і четвертим вимірювачем 70 у напруги, відповідні поточним величинам зазорів під цими датчиками (фіг. 6, 69, 70), а стрибки напруг на виходах вимірювачів 69 і 70 відповідають моментам часу проходження лиски 155 під датчиками 11 і 12. Причому, передні фронти стрибків напруг на вихода х вимірювачів 69 і 70 (фіг. 5, 6) відповідають моментам часу підходу передньої грані лиски 155 до датчиків 11 і 12, відповідно, а тривалість стрибка напруг рівна часу повороту вала 2 на кут jстр. 12 28729 лиски, змінюючи амплітуди вихідних сигналів вимірювачів 79, 80. Примусова прецесія осі обертання вала 2 у площині g викликає гіроскопічні коливання осі обертання вала 2 в площині b (фіг. 5) під впливом гіроскопічного тиску вала 2 на пружну радіальну опору 3 з амплітудою Аг.к. (фіг. 12). Причому за один оберт вала 2 гіроскопічний тиск, а отже і гіроскопічні коливання двічі змінюють свій напрямок. При цьому ви хідна напруга вимірювача 52 за сигналом датчика 9 Uвим.х1 також змінюється симетрично відносно свого середнього значення Uвим.х1сер. (фі г. 12) і не змінює величину Uвим.х1сер., також як і примусова прецесія осі обертання не змінює розташування конуса прецесії (не призводить до відхилення Uвим.х1сер. від опорної напруги Uoп.x1). Стабілізація амплітуди Ап.п. примусової прецесії у процесі шліфування здійснюється блоком 5 стабілізації амплітуди примусової прецесії осі обертання вала 2, робота якого здійснюється так. Оскільки блок 50 стабілізації включає два ідентичних субблоки (субблок 81 стабілізації амплітуди примусової прецесії по півосі +О2Y2 і субблок 82 стабілізації амплітуди примусової прецесії по півосі -О2Y2), робота яких не відрізняється одна від другої, розглянемо роботу субблока 81 (фіг. 4). До початку шліфування необхідно запам'ятати задану амплітуду Ап.п. примусової прецесії осі обертання вала 2 по півосі +О2 Y2, носієм якої є амплітуда імпульсу лиски на вході першого порогового пристрою 71, при цьому за опорну напругу приймаємо Uоп.п.п.(+у2) (фіг. 7). Для цього натискуємо і відпускаємо першу кнопку "опорне". Внаслідок цього короткий імпульс з входу першого діодного обмежувача 75 через першу кнопку 167 "опорне" запускають третій очікуючий мультивібратор 83, генеруючий прямокутний імпульс (фіг. 7, 83), тривалість ti якого дорівнює відрізку часу від початку примусової прецесії осі обертання по півосі +О2Y2, співпадаючого з імпульсом першого діодного обмежувача 75, до моменту часу t, після якого до закінчення примусової прецесії залишається відрізок часу, рівний часу перетворення напруги Uoп.п.п.(+y2) у цифровий двійковий код, тобто ti=tп.п.-tАЦП, де tАЦП - час перетворення Uoп.п.п.(+y2) аналогоцифровим перетворювачем. Це затримка часу перетворення імпульсу лиски з виходу першого порогового пристрою 71 необхідна, щоб величина примусової прецесії досягла свого амплітудного значення. Імпульс третього очікуючого мультивібратора 83 диференціюється третім диференціюючим ланцюжком 85 (фіг. 7, 85), вихід якого з'єднаний з третім діодним обмежувачем 87, короткий імпульс на виході якого (фіг. 7, 87) співпадає із заднім фронтом очікуючого мультивібратора 83, що відповідає часу початку перетворювання у цифровий двійковий код і поступає на запуск першого очікуючого блокінг-генератора 89, тривалість імпульсу якого tб.г.³tАЦП. Імпульс очікуючого блокінг-генератора 89 відкриває перший ключ 91, який підключає вихід першого порогового пристрою 71 до інформацій ного входу третього ЦАП93 і в якості сигналу "старт" поступає на сигнальний вхід АЦП93. Напруга імпульсу лиски з виходу першого порогового пристрою 71, прийнята за опорну Uoп.п.п.(+y2), перетворюється в цифровий двійковий код (фіг. 7, код Uoп.(+y2)). На момент закінчення перетворення Uoп.п.п.(+y2) АЦП93 подає сигнал готовності на третю схему клапанів 95. Вона відкривається і цифровий двійковий код з виходу АЦП93 поступає в третій регістр 97, вихід якого з'єднаний з входом третього цифро-аналогового перетворювача 99, вихідна напруга якого стане рівною Uoп.п.п.(+y2) (фіг. 7). Протягом шліфування включають перемикачі 156 і 157 і короткі імпульси з виходу першого диференціюючого ланцюжка 71, що відповідають моментам часу початку і закінчення створення примусової прецесії, безпосередньо і через перший інвертор 107 поступають на перший тригер 109. Отже передній і задній фронти імпульсу тригера 109 відповідають початку і закінченню примусової прецесії. Цей імпульс поступає на третій ключ 101 і п'ятий ключ 105, відкриває їх і підключає опорну напругу Uoп.п.п.(+y2) з виходу ЦАП99 до першого входу третього диференційного підсилювача 103, а сигнал (імпульс лиски) з виходу першого порогового пристрою 71, що відповідає поточному значенню амплітуди примусової прецесії, підключає до другого входу третього диференційного підсилювача 103. При відхиленні поточної величини напруги імпульсу лиски від опорної Uoп.п.п.(+y2) різниця потенціалів, що виникає між виходами третього диференційного підсилювача через перший суматор 68 прикладається до п'єзостовпів 24 пружних елементів з регульованою силою тиску, які в залежності від знака величини різниці потенціалів збільшують або зменшують тиск на вал 2 в напрямку півосі +О2 Y2 і до моменту закінчення примусової прецесії ліквідують відхилення Ап.п. від заданої величини. Блок 51 формування і стабілізації осьових коливань вала 2 забезпечує створення двох за один оберт вала 2 осьових заданої величини зміщень вала 2 в бік оброблюваної деталі, причому блок 51 зберігає незмінним положення в просторі (стабілізує) площини відліку амплітуди осьових коливань вала 2, а також стабілізує амплітуду цих осьових коливань при зміні осьового навантаження на вал 2 в заданому діапазоні її можливих значень. Також, як і примусова прецесія осі обертання вала 2, його осьові коливання прив'язані до фіксованих кутів повороту вала 2, тобто кожне осьове коливання виникає у момент часу повороту вектора F D динамічної нагрузки на границю D-околу площини b змінення орієнтації шліфувального круга 47 відносно оброблюваної деталі і закінчується в момент часу суміщення вектора F D з площиною b (у даному прикладі реалізація системи 8 управління і стабілізації руху вала 2). При цьому кут jо.к. між вектором F D і границею D-околу площини b (фіг. 5) в моменти часу підходу передньої грані лиски 155 до датчиків 11 і 12 дорівнює jо.к.= (p+jд/2-jп.п.)+p/2-D/2. 13 28729 Субблок 111 формування осьових коливань вала 2 блока 51 працює так. Короткі імпульси з виходів першого і другого діодних обмежувачів 75 і 76 (фіг. 8) через розподільні діоди 153 і 154 (фіг. 4) поступають на запуск п'ятого очікуючого мультивібратора 114. Причому, кожний короткий імпульс відповідає моменту часу підходу передньої грані лиски 155 до датчиків 11 і 12. П'ятий очікуючий мультивібратор 114 генерує прямокутні імпульси (фіг. 8, 114), тривалість яких дорівнює часу оберту вала 2 на кут. Отже, задні фронти цих імпульсів співпадають з моментами повороту вала 2 до границі D-околів площини b (з началом осьових коливань). Ці імпульси поступають на п'я тий диференціюючий ланцюжок 115 і п'ятий діодний обмежувач 116, що формує короткий імпульс (фіг. 8, 115, 116), тобто в цьому випадку рівна часу повороту вала 2 на кут D/2, який поступає на третій підсилювач 118, а з його виходу через третій суматор 130 на п'єзостовпи 35 регуляторів тиску 34 осьової аеростатичної опори 7. П'єзостовпи 35 регуляторів 34 тиску, встановлених на лівому (фіг. 1) підп'ятнику 32 скорочуються, внаслідок чого збільшуються площі підводячих клапанів жиклерів 33 і підвищується тиск газу у лівому підп'ятнику 32 осьової аеростатичної опори 7. П'єзостовпи 35 регуляторів 34 тиску газу, встановлені на правому підп'ятнику 16 осьової аеростатичної опори 7, подовжуються. Внаслідок зменшуються площі підводячих каналів жиклерів 33 і зменшується тиск газу у правому підп'ятнику 16 осьової аеростатичної опори 7. Під впливом різниці тисків у лівому 32 і правому 16 підп'ятниках п'ята 6 і вал 2 зміщуються вправо (фіг. 1). При зміщенні п'яти 6 вправо зазор між п'ятою 6 і правим підп'ятником 16 зменшується, а тиск газу в цьому зазорі підвищується. Зазор між п'ятою 6 і правим підп'ятником 16 збільшується, а тиск газу в цьому зазорі знижується. В момент зрівняння тиску в зазорах лівого і правого підп'ятників 16 і 32 зміщення вала 2 припиняється і він буде знаходитись в цьому положенні до моменту закінчення імпульсу шостого очікуючого мультивібратора 117. Величина зміщення вала 2 регулюється установкою відповідного коефіцієнта третього підсилювача 118. Субблок 112 стабілізації площини відліку амплітуди осьових коливань вала 2 забезпечує незмінність положення п'яти 6 осьової аеростатичної опори 7 відносно датчика 13 осьового положення вала 2 до моменту часу початку кожного осьового коливання і працює таким чином. Сигнали датчиків 13 осьового положення вала 2 і датчика 15 величини осьового коливання вала 2 п'ятим вимірювачем 119 і шостим вимірювачем 120 перетворюються в напруги, пропорційні величинам зазорів під цими датчиками (фіг. 8, 119, 120). Оскільки ці датчики 13 і 15 встановлені назустріч один одному, імпульси на їх виходах мають різну полярність і співпадають за часом. Вихідна напруга п'ятого вимірювача 119 поступає на вхід другого суматора 122, а з виходу вимірювача 120 - на третій пороговий пристрій 121 для виділення імпульсу осьового коливання (фіг. 8, 121), який також поступає на вхід другого суматора 122. Внаслідок цього в другому суматорі 122 з вихідної напруги вимірювача 119 віднімається імпульс осьового коливання (фіг. 8, 122) (для виключення впливу осьових коливань вала 2 на положення площини відліку). Вихідна напруга суматора 122 поступає на вхід третього інтегратора 123, вихідна напруга якого дорівнює постійній складовій Uп.c. вихідної напруги вимірювача 119 і до початку шлі фування відповідає незміщеному положенню п'яти 6 відносно датчика 13, яке приймають за опорну напругу Uoп.п.в. положення площини відліку для стабілізації положення площини відліку амплітуди осьових коливань вала 2. Другий перемикач 124 "опорне-робота" встановлюють в положення "опорне" і підключають вихід інтегратора 123 до входу п'ятого аналогоцифрового перетворювача 125 і натискують другу кнопку "старт" 131, при цьому підключають джерело 130 постійної напруги до сигнального входу АЦП125 в якості сигналу пуску. АЦП125 перетворює Uоп.п.в. у ци фровий двійковий код. На момент закінчення цього перетворення сигнал готовності АЦП125 відкриває п'яту схему клапанів 127 і двійковий код Uоп.п.в. поступає в п'ятий регістр 128, вихід якого з'єднаний із входом п'ятого цифро-аналогового перетворювача 129. В результаті вихідна напруга ЦАП129 стає рівною Uоп.п.в. і поступає на перший вхід п'ятого диференційного підсилювача 126. Перемикач 124 "опорне-робота" встановлюють в положення "робота" і підключають вихід інтегратора 123 до другого входу ди ференційного підсилювача 126. При зміщенні площини відліку відносно прийнятого незміщеного положення між виходами п'я того диференційного підсилювача 126 виникає різниця потенціалів пропорційна зміщенню площини відліку, яка через третій суматор 130 прикладається до п'єзостовпів 35 регуляторів 34 тиску в осьовій аеростатичній опорі 7, які змінюють тиск газу в зазорах опори 7 і запобігають зміщенню площини відліку. Така побудова субблока 112 виключає вплив осьових коливань вала 2 на положення площини відліку, не перешкоджає осьовим коливанням вала 2. Субблок 113 забезпечує в процесі шліфування стабілізацію осьових коливань вала 2 і працює таким чином. До початку шліфування запам'ятовують амплітуду імпульсу осьового коливання вала відповідну встановленій амплітуді осьових коливань вала 2 в якості опорної напруги Uoп.o.к. Для цього натискують третю кнопку 148 "опорне" і підключають вихід п'ятого діодного обмежувача 116 до входу сьомого очікуючого мультивібратора 132. Імпульси діодного обмежувача 116 відповідають моментам часу початку осьових коливань. Тому передній фронт прямокутних імпульсів, що генеруються мультивібратором 132 прямокутних імпульсів (фіг. 8, 132), співпадає з початком осьових коливань, а їх тривалість менша за тривалість осьового коливання на час необхідний для перетворення опорної напруги Uoп.o.к. у цифровий двійковий код. Імпульс очікуючого мультивібрато 14 28729 ра 132 поступає на шостий диференціюючий ланцюжок 133, вихід якої з'єднаний з входом шостого діодного обмежувача 134, короткий імпульс на виході якого (фіг. 8, 133, 134) співпадає з заднім фронтом імпульсу очікуючого мультивібратора 132 і поступає на запуск третього очікуючого блокінггенератора 132, і поступає на запуск третього очікуючого блокінг-генератора 135, імпульс якого (фіг. 8, 135) відкриває ключ 137 і запускає шостий аналого-цифровий перетворювач 136. Напруга імпульсу осьового коливання з виходу третього порогового пристрою 121 через ключ 137 в якості опорної напруги Uoп.o.к. поступає в АЦП136, де перетворюється в цифровий двійковий код. Після закінчення перетворення Uoп.o.к. сигнал готовності АЦП136 відкриває п'яту схему 138 клапанів. Двійковий код Uoп.o.к. з виходу АЦП136 поступає в шостий регістр 139, вихід якого з'єднаний з входом шостого цифро-аналогового перетворювача 140. В результаті вихідна напруга ЦАП140 стає рівною Uoп.o.к. Імпульси шостого очікуючого мультивібратора 117, передні і задні фронти яких співпадають з началом і закінченням кожного осьового коливання, поступають на сьомий диференціюючий ланцюжок 144, а з нього безпосередньо і через другий інвертор 145 на запуск третього тригера 146. Вмикають перемикач 147 і підключають вихід тригера 146 до восьмого ключа 141 і до дев'ятого ключа 142. Імпульси тригера 146, співпадаючі за часом з осьовими коливаннями вала 2, відкривають ключі 141 і 142 на час кожного осьового коливання вала 2, відкривають ключі 141 і 142 на час кожного осьового коливання, яке підключають до першого входу шостого диференційного підсилювача 143 опорну напругу Uoп.o.к. з виходу ЦАП146, а до другого його входу напругу імпульсу осьового коливання з виходу третього порогового пристрою 121, відповідного поточній величині осьового коливання вала 2. При відхиленні в процесі шліфування амплітуди осьових коливань вала 2 від встановленої величини на виходах шостого ди ференційного підсилювача 143 виникає різниця потенціалів, яка через третій суматор 130 прикладається до п'єзостовпів 35 регуляторів 34 тиску і запобігає відхиленню амплітуди осьових коливань вала 2 від встановленого значення. Шліфувальний вузол для прецизійного шліфування забезпечує зйом припуску то вщиною до 5 мм за один прохід шліфувального круга. При цьому похибка формоутворення може не перевищувати 0,1 мкм. Для розширення діапазону радіальних навантажень на вал 2, при яких забезпечується стабілізація положення конуса прецесії осі обертання вала 2 і стабілізація її амплітуди примусових коливань, всі пружні елементи радіальної пружної опори 3 можуть бути оснащені п'єзостовпами 24, тобто бути пружними елементами з регульованою силою тиску. При цьому вони об'єднуються в групи паралельно підключеним елементам з регульованою силою тиску (фіг. 16), кожна з яких розміщена симетрично відносно осей системи координат XOY. Крім того пружна радіальна опора 3 може оснащатися пружними елементами з підвищеною регульованою силою тиску (фіг. 17), що включають коромисло 160, встановлене на стійці 161 з можливістю повороту навколо осі 162, другий кінець якого штовхачем 163, встановленим на п'єзостовпі 24, упруго підтиснутий до напрямної шайби 164, причому пружина 20 розміщена між башмаком 19 і напрямною шайбою 164. Початкова сила тиску коромисла 160 на пружину 20 встановлюється регулювальним гвинтом 21. Точка упору штовхача 163 у коромисло 160 розділяє плечі коромисла у співвідношенні "n". Отже, внаслідок подачі однієї і тієї ж напруги на п'єзостовпи 24 сила тиску пружного елемента з підвищеною регульованою силою тиску в "n" разів більше за тиск на вал 2 пружного елемента з регульованою силою тиску. Осьова аеростатична опора 7 може також оснащатися швидкодіючими регуляторами, що є пропорційною ланкою системи автоматичного управління і реалізованим у вигляді коромисла 165, встановленого у камері 166 наддува регулятора 34 тиску на стійці 161 з можливістю повороту навколо осі 162 коромисла 165. Причому регулювальні голки 36 укріплені на коромислах 165, а на п'єзостовпах 35 встановлені штовхачі 163. Постійне прилягання коромисла 165 до штовхача 163 забезпечується пружинами 167 (фіг. 18). Точка упори штовхача 163 до коромисла 165 розділяє відстань між віссю симетрії регулювальної гайки 36 і віссю 162 обертання коромисла у заданому співвідношенні "К". Отже, швидкодія регулятора 34 тиску підвищується в "К" разів. Коромисло 165 встановлене на стійці 161 з можливістю повороту навколо осі 162 обертання коромисла, п'єзостовп 24, штовхач 163, регулювальна голка 36 утворюють швидкодіючий регулятор тиску. 15 28729 Фіг. 1 16 28729 Фіг. 2 17 28729 Фіг. 3 18 28729 Фіг. 4 19 28729 Фіг. 5 Фіг. 6 20 28729 Фіг. 7 21 28729 Фіг. 8 22 28729 Фіг. 9 Фіг. 10 Фіг. 11 23 28729 Фіг. 12 Фіг. 13 Фіг. 14 Фіг. 15 24 28729 Фіг. 16 25 28729 Фіг. 17 26 28729 Фіг. 18 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ __________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 __________________________________________________________ 27
ДивитисяДодаткова інформація
Назва патенту англійськоюSpindle unit for ultradeep precision grinding
Автори англійськоюShepeliev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюШпиндельный узел для сверхглубокого прецизионного шлифования
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B24B 41/00
Мітки: прецизійного, вузол, шпіндельний, надглибокого, шліфування
Код посилання
<a href="https://ua.patents.su/27-28729-shpindelnijj-vuzol-dlya-nadglibokogo-precizijjnogo-shlifuvannya.html" target="_blank" rel="follow" title="База патентів України">Шпиндельний вузол для надглибокого прецизійного шліфування</a>
Шпиндельний гідростатичний вузол
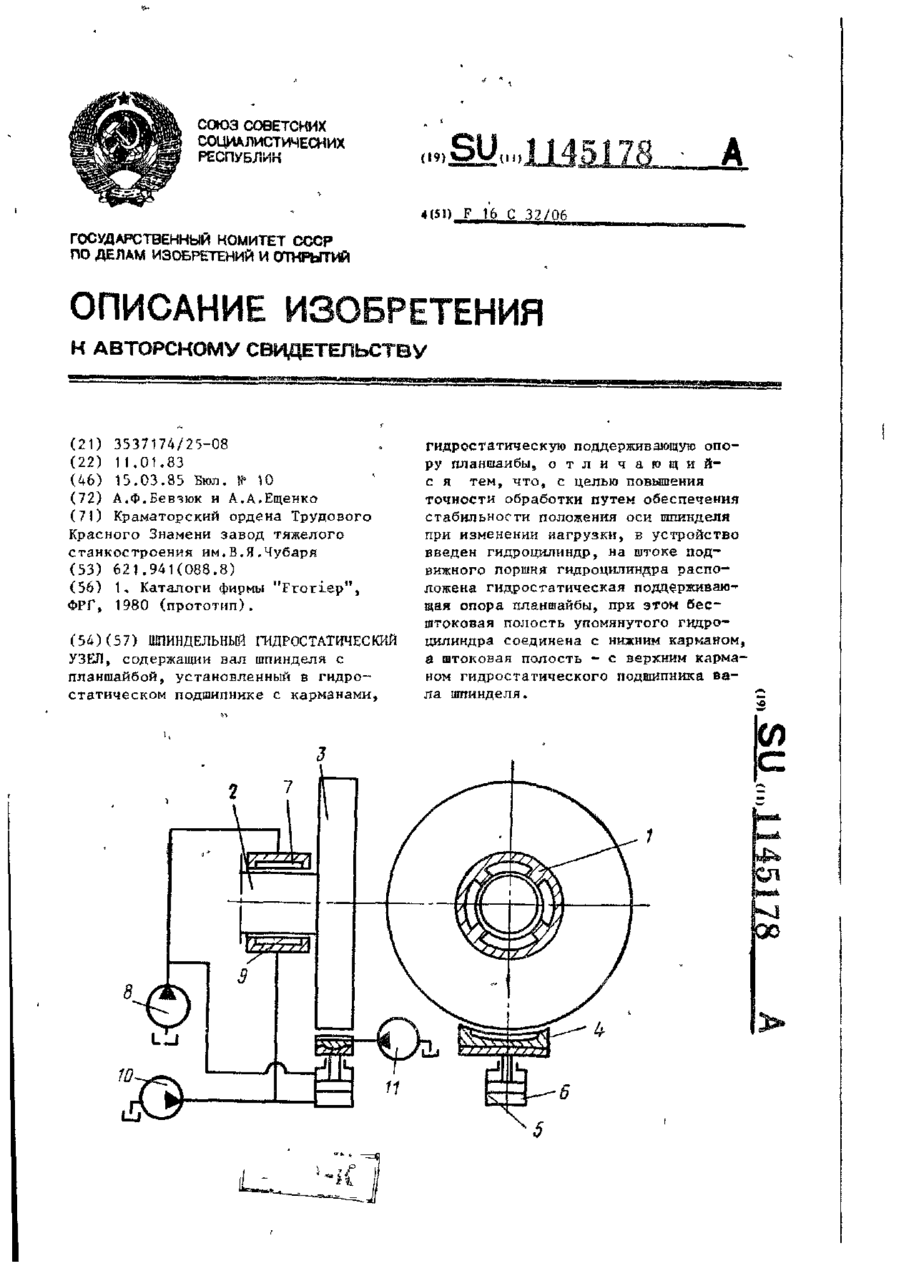
Номер патенту: 8963
Опубліковано: 30.09.1996
Автори: Єщенко Анатолій Андрійович, Бевзюк Олександр Федорович
МПК: F16C 32/06
Мітки: гідростатичний, вузол, шпіндельний
Формула / Реферат:
Шпиндельный гидростатический узел, содержащий вал шпинделя с планшайбой, установленный в гидростатическом подшипнике с карманами, гидростатическую поддерживающую опору планшайбы, отличающийся тем, что, с целью повышения точности обработки путем обеспечения стабильности положения оси шпинделя при изменении нагрузки, в устройство введен гидроцилиндр, на штоке подвижного поршня, гидроцилиндра расположена гидростатическая поддерживающая опора...
Шпиндельний вузол

Номер патенту: 14576
Опубліковано: 20.01.1997
Автори: Тимофієв Юрій Вікторович, Карпусь Владислав Євгенович, Хіцан Валерій Дмитрович, Гаврилюк Юрій Романович
МПК: B23Q 5/22, B23B 19/00
Мітки: шпіндельний, вузол
Формула / Реферат:
Шпиндельный узел, содержащий цилиндрическую втулку и электромагнитную катушку, отличающийся тем, что узел снабжен цилиндрическим корпусом с внутренней винтовой поверхностью, а цилиндрическая втулка в средней части имеет наружную винтовую Поверхность, образующую с винтовой поверхностью корпуса винтовое зацепление с зазором по профилю витков, двумя втулками, установленными на цилиндрической втулке с уплотнениями, двумя стаканами,...
Шпиндельний вузол

Номер патенту: 18903
Опубліковано: 25.12.1997
Автори: Саленко Олександр Федорович, Гейчук Володимир Миколайович, Пузько Олексій Анатолійович, Струтинський Василь Борисович, Федорець Володимир Олександрович, Лисенко Григорій Володимирович
МПК: B24B 41/00
Мітки: вузол, шпіндельний
Формула / Реферат:
Шпиндельный узел, включающий жестко связанную с корпусом полую ось, на которой в гидростатическом подшипнике установлен шпиндель-гильза с обоймой для закрепления рабочего инструмента, приводной вал, расположенный внутри полой оси и связанный со шпинделем-гильзой, при этом гидростатический подшипник содержит выполненные на наружной поверхности полой оси несущие карманы со скосами, отличающийся тем, что соседние карманы выполнены таким образом,...
Шпиндельний вузол
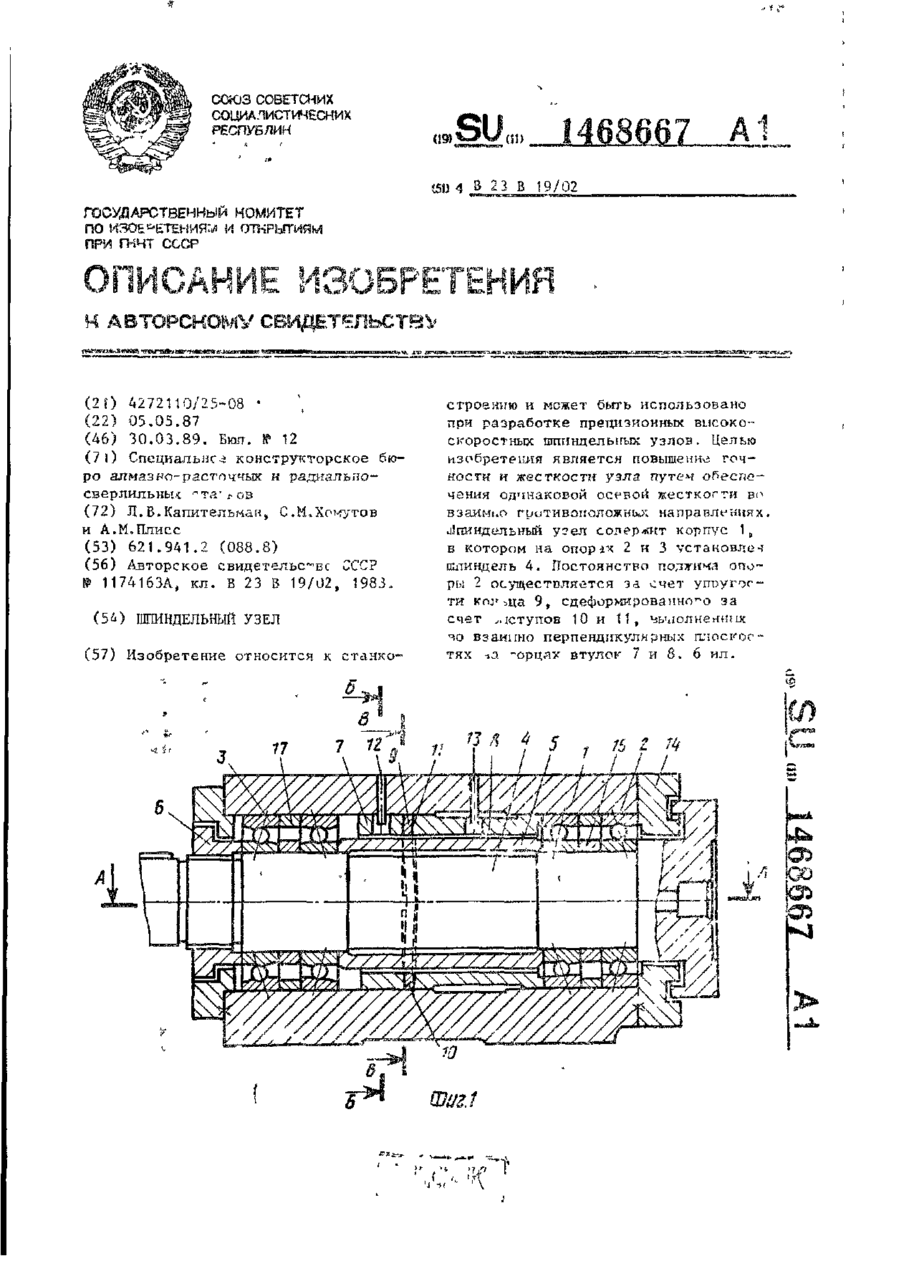
Номер патенту: 6231
Опубліковано: 29.12.1994
Автори: Капітельман Леонід Вільямович, Хомутов Семен Михайлович, Плісс Анатолій Михайлович
МПК: B23B 19/00
Мітки: вузол, шпіндельний
Формула / Реферат:
Шпиндельный узел, содержащий размещенный на подшипниках качения в корпусе шпиндель и устройство упругого поджима наружных колец подшипников к базовому торцу, отличающийся тем, что, с целью повышения точности и надежности путем обеспечения одинаковой величины осевой жесткости в противоположных направлениях, устройство упругого поджима выполнено в виде упорной и нажимной втулок и плоского упругого кольца, установленного между торцами втулок,...
Шпиндельний вузол

Номер патенту: 14578
Опубліковано: 20.01.1997
Автори: Хіцан Валерій Дмитрович, Тимофієв Юрій Вікторович, Гаврилюк Юрій Романович, Карпусь Владислав Євгенович
МПК: B23Q 5/22, B23B 19/00
Мітки: шпіндельний, вузол
Формула / Реферат:
Шпиндельный узел, содержащий цилиндрическую втулку и элементы оребрения, отличающийся тем, что элементы оребрения имеют плоскую поверхность, а цилиндрическая втулка выполнена с наружной резьбой, узел снабжен корпусом с резьбовыми отверстиями, втулкой с внутренней резьбой, двумя дисками, двумя крышками, двумя микрометрическими винтами, двумя винтами-плунжерами, а также цилиндрическими пружинами сжатия.