Пристрій і спосіб визначення матриці попереднього кодування в системі з множиною входів й множиною виходів (mimo)
Номер патенту: 97684
Опубліковано: 12.03.2012
Автори: Кім Біоунг-Хоон, Монтохо Хуан, Саркар Сандіп, Малладі Дурга Прасад
Формула / Реферат
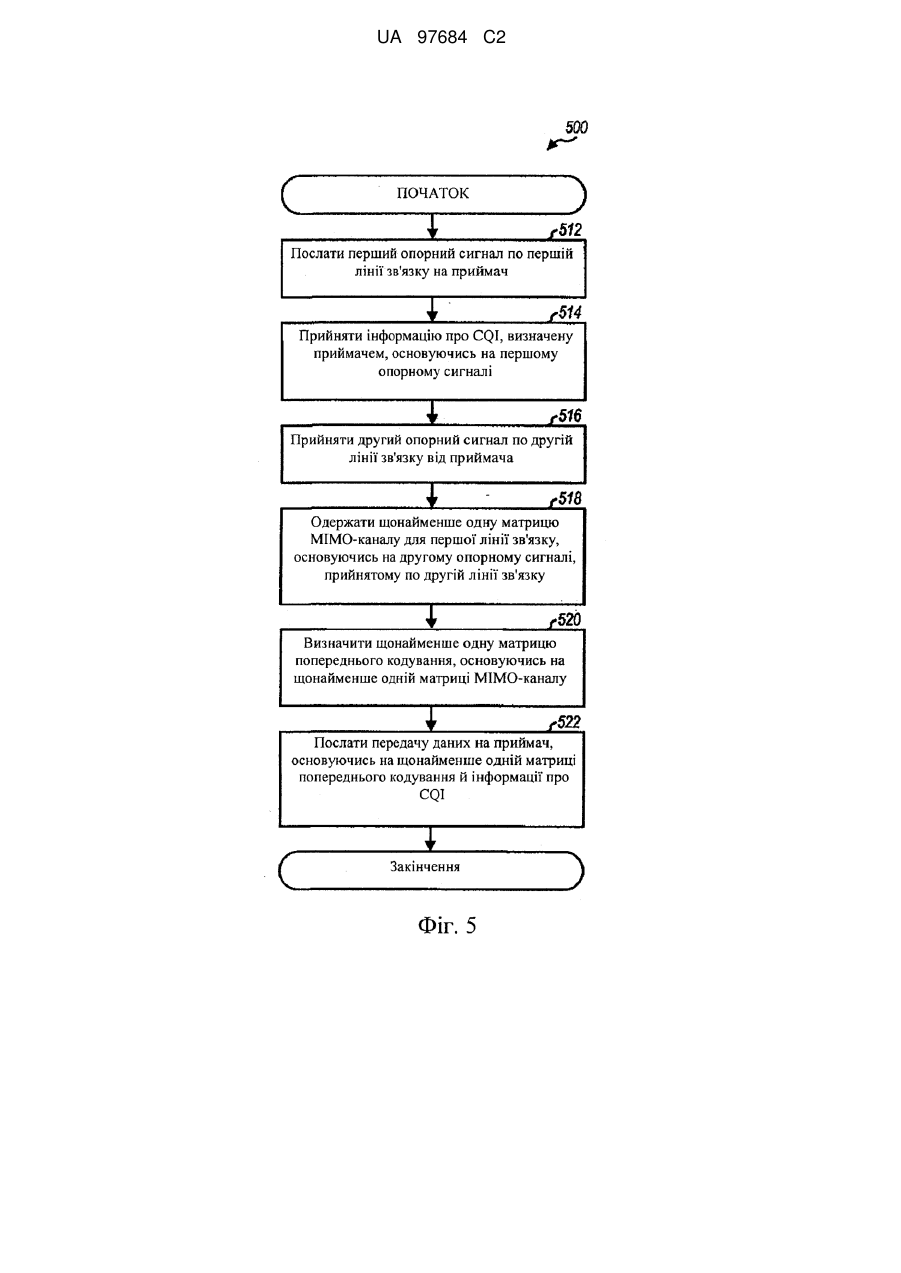
1. Спосіб передачі даних у системі бездротового зв'язку, який включає:
посилку першого опорного сигналу по першій лінії зв'язку на приймач;
прийом інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі;
прийом другогоопорного сигналу по другій лінії зв'язку від приймача;
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку;
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і
посилку передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI.
2. Спосіб за п. 1, у якому визначення щонайменше однієї матриці попереднього кодування включає:
виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; і
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів.
3. Спосіб за п. 1, у якому визначення щонайменше однієї матриці попереднього кодування включає:
формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу;
виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів.
4. Спосіб за п. 1, у якому посилка передачі даних включає:
виконання кодування й модуляції для передачі даних, основуючись на інформації про CQI; і
виконання попереднього кодування для передачі даних, основуючись на щонайменше одній матриці попереднього кодування.
5. Спосіб за п. 1, у якому посилка першого опорного сигналу по першій лінії зв'язку включає посилку характерного для стільника опорного сигналу по низхідній лінії зв'язку, і в якому прийом другого опорного сигналу по другій лінії зв'язку включає прийом зондувального опорного сигналу по висхідній лінії зв'язку.
6. Спосіб за п. 1, у якому посилка першого опорного сигналу по першій лінії зв'язку включає посилку зондувального опорного сигналу по висхідній лінії зв'язку, і в якому прийом другого опорного сигналу по другій лінії зв'язку включає прийом характерного для стільника опорного сигналу по низхідній лінії зв'язку.
7. Спосіб за п. 1, у якому один з першого й другого опорних сигналів генерується на основі псевдовипадкової послідовності, і в якому другий один з першого й другого опорних сигналів генерується на основі послідовності нульової автокореляції з постійною амплітудою (CAZAC).
8. Спосіб за п. 1, у якому посилка першого опорного сигналу включає посилку першого опорного сигналу по піднесучих, розділених за допомогою першого проміжку, і в якому прийом другого опорного сигналу включає прийом другого опорного сигналу по піднесучих, розділених за допомогою другого проміжку, відмінного від першого проміжку.
9. Спосіб за п. 1, у якому прийом інформації про CQI включає прийом щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу), що містить інформацію про CQI, і в якому посилка передачі даних включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів (OFDMA-символу) для передачі даних.
10. Спосіб за п. 1, у якому прийом інформації про CQI включає прийом щонайменше одного символу багатостанційного доступу з ортогональним розділенням каналів (OFDMA-символу), що містить інформацію про CQI, і в якому посилка передачі даних включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу) для передачі даних.
11. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, сконфігурований з можливістю
посилки першого опорного сигналу по першій лінії зв'язку на приймач;
прийому інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі;
прийому другого опорного сигналу по другій лінії зв'язку від приймача;
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку;
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і
посилки передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI.
12. Пристрій за п. 11, у якому щонайменше один процесор сконфігурований з можливістю виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів, і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів.
13. Пристрій за п. 11, у якому щонайменше один процесор сконфігурований з можливістю формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу, виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів, і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів.
14. Пристрій за п. 11, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE).
15. Пристрій для бездротового зв'язку, який містить:
засіб для посилки першого опорного сигналу по першій лінії зв'язку на приймач;
засіб для прийому інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі;
засіб для прийому другого опорного сигналу по другій лінії зв'язку від приймача;
засіб для одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку;
засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і
засіб для посилки передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI.
16. Пристрій за п. 15, у якому засіб для визначення щонайменше однієї матриці попереднього кодування містить:
засіб для виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; і
засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів.
17. Пристрій за п. 15, у якому засіб для визначення щонайменше однієї матриці попереднього кодування містить:
засіб для формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу;
засіб для виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і
засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів.
18. Пристрій за п. 15, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE).
19. Зчитуваний комп'ютером носій, який містить:
код, що викликає посилку щонайменше одним комп'ютером першого опорного сигналу по першій лінії зв'язку на приймач;
код, що викликає прийом щонайменше одним комп'ютером інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі;
код, що викликає прийом щонайменше одним комп'ютером другого опорного сигналу по другій лінії зв'язку від приймача;
код, що викликає одержання щонайменше одним комп'ютером щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку;
код, що викликає визначення щонайменше одним комп'ютером щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і
код, що викликає посилку передачі даних щонайменше одним комп'ютером на приймач, основуючись на щонайменше матриці попереднього кодування й інформації про CQI.
20. Спосіб прийому даних у системі бездротового зв'язку, який включає:
прийом першого опорного сигналу по першій лінії зв'язку від передавача;
визначення інформації про індикатор якості каналу (CQI), основуючись на першому опорному сигналі;
посилку інформації про CQI на передавач;
посилку другого опорного сигналу по другій лінії зв'язку; і
прийом переданих даних, що посилаються передавачем, основуючись на інформації про CQI і щонайменше одній матриці попереднього кодування, визначеній передавачем, основуючись на другому опорному сигналі.
21. Спосіб за п. 20, який також включає:
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу), основуючись на першому опорному сигналі;
визначення щонайменше однієї матриці виявлення, основуючись на щонайменше одній матриці МІМО-каналу; і
виконання виявлення МІМО для прийнятої передачі даних, основуючись на щонайменше одній матриці виявлення.
22. Спосіб за п. 20, який також включає:
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу), основуючись на першому опорному сигналі;
виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; і
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів,
і в якому визначення інформації про CQI включає визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування.
23. Спосіб за п. 20, який також включає:
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу), основуючись на першому опорному сигналі;
формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу;
виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів,
і в якому визначення інформації про CQI включає визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування.
24. Спосіб за п. 20, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE).
25. Спосіб за п. 20, у якому один з першого й другого опорних сигналів генерується на основі псевдовипадкової послідовності, і в якому інший один з першого й другого опорних сигналів генерується на основі послідовності нульової автокореляції з постійною амплітудою (CAZAC).
26. Спосіб за п. 20, у якому посилка інформації про CQI включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу), що містить інформацію про CQI, і в якому прийом передачі даних включає прийом щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів (OFDMA-символу) для передачі даних.
27. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, сконфігурований з можливістю
прийому першого опорного сигналу по першій лінії зв'язку від передавача;
визначення інформації про індикатор якості каналу (CQI), основуючись на першому опорному сигналі;
посилки інформації про CQI на передавач;
посилки другого опорного сигналу по другій лінії зв'язку; і
прийому передачі даних, що посилається передавачем, основуючись на інформації про CQI і щонайменше одній матриці попереднього кодування, визначеній передавачем, основуючись на другому опорному сигналі.
28. Пристрій за п. 27, у якому щонайменше один процесор сконфігурований з можливістю
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу), основуючись на першому опорному сигналі;
виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів;
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів; і
визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування.
29. Пристрій за п. 27, у якому щонайменше один процесор сконфігурований з можливістю
одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу), основуючись на першому опорному сигналі;
формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу;
виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів;
визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів; і
визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування.
30. Пристрій за п. 27, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE).
Текст
Реферат: Описані методи посилки передач з множиною входів й множиною виходів (МІМО-передач) у системах бездротового зв'язку. В одному методі передавач посилає перший опорний сигнал по першій лінії зв'язку, наприклад характерний для стільника опорний сигнал, по низхідній лінії зв'язку. Передавач приймає інформацію про індикатор якості каналу (CQI), визначену приймачем, основуючись на першому опорному сигналі. Передавач також приймає другий опорний сигнал від приймача по другій лінії зв'язку, наприклад зондувальний опорний сигнал, по висхідній лінії зв'язку. Передавач одержує щонайменше одну матрицю МІМО-каналу для першої лінії зв'язку, основуючись на другому опорному сигналі. Передавач визначає щонайменше одну матрицю попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу, наприклад, відповідно до формування ідеального власного променя або формування псевдовласного променя. Потім передавач посилає передачу даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI. UA 97684 C2 (12) UA 97684 C2 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 За даною заявкою вимагається пріоритет на основі попередньої заявки на патент США № 60/956106, озаглавленої "BEAMFORMING FOR TDD IN LTE", поданої 15 серпня 2007 p., яка належить тому ж правонаступнику, що й дана заявка, і включена тут по посиланню. I. Галузь техніки, до якої належить винахід Даний винахід стосується, в основному, зв'язку й, більш конкретно, методів передачі даних у системі бездротового зв'язку. II. Рівень техніки У системі бездротового зв'язку передавач може використовувати численні (T) передавальні антени для передачі даних на приймач, оснащений численними (R) приймальними антенами. Численні передавальні й приймальні антени утворюють канал з множиною входів й множиною виходів (МІМО-канал), який може використовуватися для збільшення пропускної здатності й/або підвищення надійності. Наприклад, передавач може передавати до T потоків символів одночасно з T передавальних антен для збільшення пропускної здатності. Альтернативно, передавач може передавати один потік символів зі всіх T передавальних антен для поліпшення прийому приймачем. В будь-якому випадку, бажано передавати дані так, щоб досягти гарних робочих характеристик. Суть винаходу У даному документі описуються методи для посилки МІМО-передачі в системах бездротового зв'язку. Методи можуть використовуватися для систем дуплекса із частотним розділенням (FDD) і дуплекса з часовим розділенням (TDD). В одному методі передавач може посилати перший опорний сигнал по першій лінії зв'язку. Передавачем може бути вузол В для передачі даних по низхідній лінії зв'язку або користувацьке обладнання (UE) для передачі даних по висхідній лінії зв'язку. Передавач може приймати інформацію про індикатор якості каналу (CQI), визначену приймачем, основуючись на першому опорному сигналі. Передавач також може приймати другий опорний сигнал по другій лінії зв'язку від приймача. Передавач може одержувати щонайменше одну матрицю МІМО-каналу для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку. Передавач може визначати щонайменше одну матрицю попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу. Передавач потім може посилати передачу даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQІ. В іншому методі передавач може виконувати розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів. Передавач потім може визначати щонайменше одну матрицю попереднього кодування, основуючись на щонайменше одній матриці власних векторів. В іншій розробці, передавач може формувати щонайменше одну матрицю псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу. Передавач може виконувати QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів. Передавач потім може визначати щонайменше одну матрицю попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів. Для передачі даних по низхідній лінії зв'язку перший опорний сигнал може являти собою характерний для стільника опорний сигнал, що посилається вузлом В по низхідній лінії зв'язку, і другий опорний сигнал може являти собою зондувальний опорний сигнал, що посилається за допомогою UE по висхідній лінії зв'язку. Для передачі даних по висхідній лінії зв'язку перший опорний сигнал може являти собою зондувальний опорний сигнал, що посилається за допомогою UE по висхідній лінії зв'язку, і другий опорний сигнал може являти собою характерний для стільника опорний сигнал, що посилається вузлом В по низхідній лінії зв'язку. Опорний сигнал являє собою сигнал, який відомий апріорі як передавачу, так і приймачу. Опорний сигнал також може згадуватися як пілот-сигнал, преамбула, зондування і т. д. Різні аспекти й ознаки винаходу описуються більш докладно нижче. Короткий опис креслень Фіг. 1 зображує систему бездротового зв'язку. Фіг. 2А зображує зразкову структуру кадру для FDD. Фіг. 2В зображує зразкову структуру кадру для TDD. Фіг. 3А зображує характерний для стільника опорний сигнал, що посилається вузлом В. Фіг. 3В зображує зондувальний опорний сигнал, що посилається за допомогою UE. Фіг. 4 зображує блок-схему вузла В і UE. Фіг. 5 зображує процес посилки МІМО-передачі. Фіг. 6 зображує пристрій для посилки МІМО-передачі. 1 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 7 зображує процес прийому МІМО-передачі. Фіг. 8 зображує пристрій для прийому МІМО-передачі. Докладний опис Методи, описані в даному документі, можуть використовуватися для різних систем бездротового зв'язку, таких як системи багатостанційного доступу з кодовим розділенням каналів (CDMA), системи багатостанційного доступу з часовим розділенням каналів (TDMA), системи багатостанційного доступу із частотним розділенням каналів (FDMA), системи багатостанційного доступу з ортогональним частотним розділенням каналів (OFDMA), системи FDMA на одній несучій (SC-FDMA) і інші системи. Терміни "система" і "мережа" часто використовуються взаємозамінно. Система CDMA може реалізувати радіотехнологію, таку як універсальний наземний радіодоступ (UTRA), cdma2000 і т. п. UTRA включає в себе широкосмуговий CDMA (WCDMA) і інші варіанти CDMA. Cdma2000 охоплює стандарти IS-2000, IS-95 і IS-856. Система TDMA може реалізувати радіотехнологію, таку як глобальна система мобільного зв'язку (GSM). Система OFDMA може реалізувати радіотехнологію, таку як еволюціонований UTRA (E-UTRA), ультрамобільна широкосмугова мережа (UMB), IEEE 802.11 (Wi-Fi (бездротова точність)), IEEE 802.16 (Wimax (загальносвітова сумісність широкосмугового бездротового доступу)), IEEE 802.20, Flash-OFDM® (швидкий доступ з малим часом очікування й безшовним переходом між базовими станціями на основі мультиплексування з ортогональним розділенням частот) і т. д. UTRA і E-UTRA є частиною універсальної системи мобільному зв'язку (UMTS). Довгострокова еволюція (LTE) Проекту партнерства по створенню системи третього покоління (3GPP) являє собою наступну версію UMTS, яка використовує E-UTRA, який застосовує OFDMA на низхідній лінії зв'язку, і SC-FDMA на висхідній лінії зв'язку. UTRA, EUTRA, UMTS, LTE і GSM описані в документах організації, названої "Проект партнерства по створенню системи 3-го покоління" (3GPP). Cdma2000 і UMB описані в документах організації, названої "Проект 2 партнерства по створенню системи 3-го покоління" (3GPP2). Для ясності, деякі аспекти методів описуються нижче для передачі даних в LTE, і термінологія LTE використовується в більшій частині опису нижче. Фіг. 1 зображує систему 100 бездротового зв'язку, якою може бути система LTE. Система 100 може містити декілька вузлів B 110 i інші мережні об'єкти. Вузол В може являти собою стаціонарну станцію, яка виконує зв'язок з UE і також може згадуватися як еволюціонований вузол В (eNB), базова станція, точка доступу й т. п. Кожний вузол В 110 забезпечує покриття зв'язку для конкретної географічної області. Щоб поліпшити пропускну здатність системи, вся зона покриття вузла В може розбиватися на численні (наприклад, три) менші зони. Кожна менша зона може обслуговуватися відповідною підсистемою вузла В. В 3GPP термін "стільник" може посилатися на найменшу зону покриття вузла В і/або підсистеми вузла В, що обслуговують дану зону покриття. В 3GPP2 термін "сектор" може посилатися на найменші зони покриття базової станції і/або підсистеми базової станції, що обслуговують дану зону покриття. Для ясності, нижче в описі використовується поняття 3GPP стільника. UE 120 можуть бути розосереджені по системі, і кожне UE може бути стаціонарним або мобільним. UE також може згадуватися як мобільна станція, термінал, термінал доступу, абонентський блок, станція і т. д. UE може являти собою стільниковий телефон, персональний цифровий помічник (PDA), бездротовий модем, пристрій бездротового зв'язку, кишеньковий пристрій, портативний комп'ютер, бездротовий телефон і т. д. UE може виконувати зв'язок з вузлом В по низхідній і висхідній лініях зв'язку. Низхідна лінія зв'язку (або пряма лінія зв'язку) стосується лінії зв'язку від вузла В на UE, й висхідна лінія зв'язку (або зворотна лінія зв'язку) стосується лінії зв'язку від UE на вузол В. LTE використовує мультиплексування з ортогональним частотним розділенням каналів (OFDM) по низхідній лінії зв'язку й мультиплексування з частотним розділенням каналів на одній несучій (SC-FDM) на висхідній лінії зв'язку. OFDM і SC-FDM розбивають смугу частот системи на численні (K) ортогональні піднесучі, які також звичайно згадуються як тони, біни і т. д. Кожна піднесуча може модулюватися даними. Звичайно модуляційні символи посилаються у частотній області за допомогою OFDM і в часовій області за допомогою SC-FDM. Проміжок між сусідніми піднесучими може бути фіксованим, і загальна кількість піднесучих (K) може залежати від смуги частот системи. Наприклад, K може дорівнювати 128, 256, 512, 1024 або 2048 для смуги частот системи 1,25, 2,5, 5, 10 або 20 МГц, відповідно. K результуючих піднесучих можуть групуватися в блоки ресурсів. Кожний блок ресурсів може включати N піднесучих (наприклад, N=12 піднесучим) в одному слоті. Доступні блоки ресурсів можуть призначатися UE для передачі даних трафіку й керуючої інформації. K результуючих піднесучих також можуть розбиватися на підсмуги. Кожна підсмуга може включати 72 піднесучі в 6 блоках ресурсів і може охоплювати 1,08 МГц. 2 UA 97684 C2 5 10 15 20 25 30 35 40 Система може використовувати FDD або TDD. Для FDD низхідної лінії зв'язку й висхідної лінії зв'язку можуть розподілятися окремі частотні канали, і характеристика каналу для низхідної лінії зв'язку може не зіставлятися з характеристикою каналу для висхідної лінії зв'язку. Для TDD низхідна лінія зв'язку й висхідна лінія зв'язку можуть спільно використовувати один і той самий частотний канал, і характеристика каналу низхідної лінії зв'язку може зіставлятися з характеристикою каналу висхідної лінії зв'язку. Фіг. 2А зображує зразкову структуру 200 кадру типу 1 структури кадру (FS1), яка може використовуватися для FDD в LTE. Часова шкала передачі для кожної лінії зв'язку може розбиватися на блоки радіокадрів. Кожний радіокадр може мати задану тривалість (наприклад, 10 мілісекунд (мс)) і може розбиватися на 10 підкадрів з індексами 0-9. Кожний підкадр може включати два слоти, і кожний слот може включати L періодів символу, наприклад, L=6 періодам символу для розширеного циклічного префікса або L=7 періодам символу для нормального циклічного префікса. Для FDD 10 підкадрів можуть бути доступні для передачі по низхідній лінії зв'язку, і 10 підкадрів можуть бути доступні для передачі по висхідній лінії зв'язку в кожному радіокадрі. Передачі по низхідній лінії зв'язку й висхідній лінії зв'язку розбиваються в частотній області. Фіг. 2В зображує зразкову структуру 250 кадру типу 2 структури кадру (FS2), яка може використовуватися для TDD в LTE. Часова шкала передачі може розбиватися на блоки радіокадрів. Кожний радіокадр може мати тривалість 10 мс і може розбиватися на 10 підкадрів з індексами 0-9. LTE підтримує численні конфігурації низхідної-висхідної ліній зв'язку. Підкадри 0 і 5 можуть використовуватися для низхідної лінії зв'язку (DL), і підкадр 2 може використовуватися для висхідної лінії зв'язку (UL) для всіх конфігурацій низхідної-висхідної ліній зв'язку. Кожний з підкадрів 3, 4, 7, 8 і 9 може використовуватися або для низхідної лінії зв'язку, або для висхідної лінії зв'язку залежно від конфігурації низхідної-висхідної ліній зв'язку. Підкадр 1 може включати три спеціальні поля, складених з часового слота пілот-сигналу низхідної лінії зв'язку (DwPTS) для сигналів передачі даних, керування й синхронізації, захисного інтервалу (GP) без передачі й часового слота пілот-сигналу висхідної лінії зв'язку (UpPTS) для зондувальних опорних сигналів і каналу випадкового доступу (RACH). Підкадр 6 може сключати тільки DwPTS, або всі три спеціальні поля, або підкадр низхідної лінії зв'язку залежно від конфігурації низхідної-висхідної ліній зв'язку. DwPTS, GP і UpPTS можуть мати різні тривалості для різних конфігурацій підкадрів. Кожний підкадр, який не використовується для спеціальних полів, може розбиватися на два слоти, і кожний слот може включати L періодів символу. Структури 200 і 250 кадру зображуються в документі TS 36.2113GPP, озаглавленому "Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation", який знаходиться у вільному доступі. Система може підтримувати різні опорні сигнали для низхідної лінії зв'язку й висхідної лінії зв'язку. Опорний сигнал може використовуватися приймачем для різних цілей, таких як оцінка каналу, когерентна демодуляція, вимірювання якості каналу, вимірювання рівня сигналу і т. д. У таблиці 1 перераховані деякі опорні сигнали, які можуть передаватися по низхідній лінії зв'язку й висхідній лінії зв'язку, і вона забезпечує короткий опис кожного опорного сигналу. Характерний для стільника опорний сигнал також може згадуватися як загальний пілот-сигнал, широкосмуговий пілот-сигнал і т. д. Таблиця 1 Лінія зв'язку Низхідна лінія зв'язку Висхідна лінія зв'язку 45 Зондувальний опорний сигнал Опис Опорний сигнал, який посилається вузлом В і використовується за допомогою UE для оцінки каналу й вимірювання якості каналу Опорний сигнал, який посилається за допомогою UE і використовується вузлом В для оцінки каналу й вимірювання якості каналу Опорні сигнали можуть генеруватися різним чином. В одній розробці, послідовність характерного для стільника опорного сигналу може генеруватися на основі псевдовипадкової послідовності наступним чином: rcsrs (n) 50 Опорний сигнал Характерний для стільника опорний сигнал 1 2 1 2 c( 2n) j 1 2 1 2 c(2n 1) , Рівняння (1) де с ( n) являє собою псевдовипадкову послідовність, і fcsrs(n) являє собою послідовність характерного для стільника опорного сигналу. 3 UA 97684 C2 5 10 Псевдовипадкова послідовність с ( n) може генеруватися за допомогою регістра зсуву з лінійним зворотним зв'язком (LFSR), який може ініціалізуватися значенням, визначеним на основі ідентифікатора стільника (ID). У розробці, показаній в рівнянні (1), послідовність r c s r s ( n) характерного для стільника опорного сигналу складається з комплекснозначних символів, причому кожний комплекснозначний символ задається двома послідовними символами псевдовипадкової послідовності. Послідовність r c s r s ( n) може використовуватися для генерування характерного для стільника опорного сигналу. Зондувальний опорний сигнал може генеруватися на основі послідовності нульової автокореляції з постійною амплітудою (CAZAC), що має гарні кореляційні властивості. В одній розробці, послідовність CAZAC являє собою послідовність Задова-Чу (Zardoff-Chu), яка може бути виражена як: x q (n) e jqn(n 1) / L 15 20 25 30 35 40 45 50 55 , Рівняння (2) де q являє собою корінь, і L являє собою довжину послідовності Задова-Чу, і х q ( n ) являє собою послідовність Задова-Чу q-того кореня. L може являти собою найбільше просте число, менше ніж необхідна довжина послідовності зондувального опорного сигналу. Послідовність Задова-Чу може повторюватися необхідне число разів для одержання базової послідовності r b ( n) необхідної довжини наступним чином: rb( n ) = х q ( n mod L ) , Рівняння (3) В іншій розробці базова послідовність може визначатися наступним чином: j (п) /4 r b ( n ) = е , Рівняння (4) де ( n) являє собою набір фаз, визначених для одержання послідовності CAZAC Для обох розробок вище послідовність r s r s ( n) зондувального опорного сигналу може бути одержана за допомогою циклічного зсуву базової послідовності r b ( n) наступним чином: j n r s r s (n)= e r b ( n ) , Рівняння (5) де являє собою циклічний зсув, наданий UE. Послідовність r s r s ( n) може використовуватися для генерування зондувального опорного сигналу. Вузол В також може посилати характерний для UE опорний сигнал на UE. Генерування характерного для стільника опорного сигналу, зондувального опорного сигналу й інших опорних сигналів в LTE описується у вищезгаданому документі TS 36.211 3GPP. Фіг. 3А зображує зразкову передачу характерного для стільника опорного сигналу з чотирьох антен 0-3 для одного стільника. В LTE кожний слот включає в себе сім періодів 0-6 символу для нормального циклічного префікса. Характерний для стільника опорний сигнал може передаватися з антен 0 I 1 y періодах 0 і 4 символу кожного слота й з антен 2 і 3 у періоді 1 символу кожного слота. Характерний для стільника опорний сигнал може передаватися з даної антени на піднесучих, які рознесені на шість піднесучих у кожному періоді символу, у якому передається опорний сигнал. Крім того, інші сигнали не можуть передаватися стільником на піднесучих, використовуваних для характерного для стільника опорного сигналу, щоб уникнути перешкод для характерного для стільника опорного сигналу. Як показано на фіг. 3А, характерний для стільника опорний сигнал може передаватися з антени 0 по першому набору піднесучих у періоді 0 символу й по другому набору піднесучих у періоді 4 символу кожного слота. Піднесучі у другому наборі можуть бути зміщені від піднесучих у першому наборі на три піднесучі. Характерний для стільника опорний сигнал може передаватися з антени 1 по другому набору піднесучих у періоді 0 символу й по першому набору піднесучих у періоді 4 символу кожного слота. Характерний для стільникаопорний сигнал може передаватися з антени 2 по першому набору піднесучих у періоді 1 символу кожного слота з парним номером і по другому набору піднесучих у періоді 1 символу кожного слота з непарним номером. Характерний для стільника опорний сигнал може передаватися з антени 3 по другому набору піднесучих у періоді 1 символу кожного слота з парним номером і по першому набору піднесучих у періоді 1 символу кожного слота з непарним номером. Фіг. 3В зображує зразкову передачу зондувального опорного сигналу по висхідній лінії зв'язку. Зондувальний опорний сигнал може передаватися через піднесучу в наборі піднесучих, які можуть охоплювати одну підсмугу частот, численні підсмуги частот або всю смугу частот системи. Зондувальний опорний сигнал може передаватися в останньому періоді символу підкадру. Зондувальний опорний сигнал може передаватися по різних підсмугах частот у різних підкадрах, наприклад, із циклічним повторенням по підсмугах частот і передачею зондувального опорного сигналу по іншій підсмузі частот у кожному підкадрі, у якому передається зондувальний опорний сигнал. Зондувальний опорний сигнал також може передаватися з різних антен в UE у різних підкадрах, наприклад, з циклічним повторенням по антенах і передачею 4 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 зондувального опорного сигналу з іншої антени в кожному підкадрі, у якому передається зондувальний опорний сигнал. Передача характерного для стільника опорного сигналу й зондувального опорного сигналу описується у вищезгаданому документі TS 36.211 3GPP. Фіг. 4 зображує блок-схему розробки вузла В 110 і UE 120, яким може бути один з вузлів В і одне з UE на фіг. 1. Вузол В 110 оснащений численними (T) антенами 434a-434t. UE 120 оснащене численними (R) антенами 452а-452r. У основуючись на оцінці МІМО-каналу низхідної лінії зв'язку, і подавати оцінки символів, які являють собою оцінки переданих символів. Процесор 470 прийому може обробляти (наприклад, демодулювати і декодувати) оцінки символів, подавати декодовані дані трафіку на приймач 472 даних, і подавати декодовану керуючу інформацію на контролер/процесор 490. UE 120 може оцінювати якість каналу низхідної лінії зв'язку й генерувати інформацію зворотного зв'язку, яка може містити різні типи інформації, описані нижче. Інформація зворотного зв'язку, дані трафіку від джерела 478 даних і один або декілька опорних сигналів (наприклад, зондувальний опорний сигнал) можуть оброблятися (наприклад, кодуватися й модулюватися) процесором 480 передачі, попередньо кодуватися процесором 482 MIMO і додатково оброблятися модуляторами 454а-454r для генерування R сигналів висхідної лінії зв'язку, які можуть передаватися за допомогою антен 452a-452r. На вузлі В 110 R сигналів висхідної лінії зв'язку від UE 120 можуть прийматися антенами 434a-434t і оброблятися демодуляторами 432a-432t. Процесор 444 каналу може оцінювати МІМО-канал висхідної лінії зв'язку від UE 120 на вузол В 110 і може подавати оцінку МІМО-каналу висхідної лінії зв'язку на виявник 436 МІМО. Виявник 436 MIMO може виконувати виявлення МІМО, основуючись на оцінці МІМО-каналу висхідної лінії зв'язку й подавати оцінки символів. Процесор 438 прийому може обробляти оцінки символів, подавати декодовані дані трафіку на приймач 439 даних і подавати декодовану інформацію зворотного зв'язку на контролер/процесор 440. Контролер/процесор 440 може керувати передачею даних на UE 120, основуючись на інформації зворотного зв'язку. Контролери/процесори 440 і 490 можуть керувати роботою на вузлі B 110 i UE 120, відповідно. Пам'ять 442 і 492 може зберігати дані й програмні коди для вузла В 110 і UE 120, відповідно. Планувальник 446 може вибирати UE 120 і/або інші UE для передачі даних по низхідній лінії зв'язку й/або висхідної лінії зв'язку, основуючись на інформації зворотного зв'язку, прийнятій від UE. Планувальник 446 також може розподіляти ресурси запланованим UE. МІМО-канал низхідної лінії зв'язку, сформований за допомогою T антен на вузлі В 110 і R антен на UE 120, може характеризуватися матрицею HDL(k) МІМО-каналу розміру RT для кожної піднесучої k . HDL(k) може бути виражена як: більшій частині опису нижче передбачається, що кожна антена може використовуватися для передачі й прийому даних. На вузлі B 110 процесор 420 передачі може приймати дані трафіку для одного або декількох UE від джерела 412 даних, обробляти (наприклад, кодувати й модулювати) дані трафіку для кожного UE, основуючись на одній або декількох схемах модуляції й кодування (MCS) для цього UE, і подавати символи даних на всі UE. Процесор 420 передачі також може генерувати керуючі символи для керуючої інформації/сигналізації. Процесор 420 передачі додатково може генерувати опорні символи для одного або декількох опорних сигналів, наприклад, характерного для стільника опорного сигналу. Процесор 430 MIMO може виконувати попереднє кодування для символів даних, керуючих символів і опорних сигналів, як описано нижче, і може подавати T вихідних потоків символів на T модуляторів (MOD) 432a-432t. Кожний модулятор 432 може обробляти свій вихідний потік символів (наприклад, для OFDM) для одержання вихідного потоку відліків. Кожний модулятор 432 додатково може приводити в певний стан (наприклад, перетворювати в аналогову форму, фільтрувати, підсилювати й перетворювати з підвищенням частоти) свій вихідний потік відліків і генерувати сигнал низхідної лінії зв'язку. T сигналів низхідної лінії зв'язку від модуляторів 432a-432t можуть передаватися за допомогою антен 434a434t, відповідно. На UE 120 R антен 452а-452r можуть приймати T сигналів низхідної лінії зв'язку від вузла В 110, і кожна антена 452 може подавати прийнятий сигнал на пов'язаний з нею демодулятор (DEMOD) 454. Кожний демодулятор 454 може приводити в певний стан (наприклад, фільтрувати, підсилювати, перетворювати зі зниженням частоти й оцифровувати) свій прийнятий сигнал для одержання відліків і може додатково обробляти відліки (наприклад, для OFDM) для одержання прийнятих символів. Кожний демодулятор 454 може подавати прийняті символи даних і прийняті керуючі символи на виявник 460 MIMO і може подавати прийняті опорні символи на процесор 494 каналу. Процесор 494 каналу може оцінювати МІМО-канал низхідної лінії зв'язку від вузла В 110 на UE 120, основуючись на прийнятих опорних символах, і 5 UA 97684 C2 може подавати оцінку МІМО-каналу низхідної лінії зв'язку на виявник 460 МІМО. Виявник 460 MIMO може виконувати виявлення MIMO по прийнятих символах даних і прийнятих керуючих символах, h1,1(k ) h1,2 (k ) h1,T (k ) h2,1(k ) h2,2 (k ) h2,T (k ) HDL (k ) hR,1(k ) hR,2 (k ) hR,T (k ) , Рівняння (6) 5 10 15 20 25 30 35 40 45 50 55 де hij(k) для i=1, ... R і j=1, ... T являє собою комплексний коефіцієнт підсилення між антеною j вузла В і антеною i UE для піднесучої k. МІМО-канал висхідної лінії зв'язку, сформований R антенами на UE 120 і T антенами на вузлі В 110, може характеризуватися матрицею HUL(k) МІМО-каналу розміру TR для кожної піднесучої k. HUL(k) може мати форму, показану в рівнянні (6). Для FDD матриця HDL(k) МІМО-каналу низхідної лінії зв'язку може не зіставлятися з матрицею HUL(k) МІМО-каналу висхідної лінії зв'язку. Вузол В може оцінювати HUL(k), основуючись на зондувальному опорному сигналі, що передається UE. Вузол В може посилати інформацію про індикатор матриці попереднього кодування (РМІ), одержану з HUL(k), на UE для попереднього кодування на висхідній лінії зв'язку. Аналогічно, UE може оцінювати HDL(k), основуючись на характерному для стільника опорному сигналі, що передається вузлом В. UE може посилати інформацію про РМІ, що одержана з HDL(k), на вузол В для попереднього кодування на низхідній лінії зв'язку. Для TDD матриця HDL(k) МІМО-каналу низхідної лінії зв'язку може зіставлятися з матрицею HUL(k) МІМО-каналу висхідної лінії зв'язку й передбачається, що вони можуть бути зворотними Т величинами одна для одної так, що HUL(k)=H DL(K), де "Т" означає транспонування. У цьому випадку, вузол В може оцінювати HUL(k), основуючись на зондувальному опорному сигналі, що передається UE. Вузол В може оцінювати HDL(k), основуючись на оціненій HUL(k), передбачаючи оборотність каналів. Вузол В потім може використовувати HDL(k) для одержання інформації про PMI для низхідної лінії зв'язку. Аналогічно, UE може оцінювати HDL(k), основуючись на характерному для стільника опорному сигналі, що передається вузлом В. UE може оцінювати HUL(k), основуючись на оціненій HDL(k), передбачаючи оборотність каналів. UE тоді може використовувати HUL(k) для одержання інформації про PMI для висхідної лінії зв'язку. Загальний МІМО-канал низхідної лінії зв'язку складається з каналів передачі для T антен на вузлі В, МІМО-каналу низхідної лінії зв'язку й приймальних каналів для R антен на UE. Загальний МІМО-канал висхідної лінії зв'язку складається з передавальних каналів для R антен на UE, МІМО-каналу висхідної лінії зв'язку й приймальних каналів для T антен на вузлі В. Для FDD загальний МІМО-канал низхідної лінії зв'язку для кожної лінії зв'язку може оцінюватися на основі опорного сигналу, що приймається по цій лінії зв'язку. Для TDD загальний МІМО-канал низхідної лінії зв'язку може не бути оборотним для загального МІМО-каналу висхідної лінії T зв'язку, навіть якщо HUL(k)=H DL(k) через відмінності між характеристиками каналів передачі й прийому на вузлі В і UE. Калібрування може виконуватися для визначення матриці калібрування, яка може застосовуватися (наприклад, на вузлі В) для врахування відмінностей між характеристиками каналів передачі й прийому на вузлі В і UE. Калібрування може виконуватися так, як описано в заявці на патент США № 10/693169, озаглавленій "CHANNEL CALIBRATION FOR A TIME DIVISION DUPLEXED COMMUNICATION SYSTEM", яка належить цьому ж правонаступнику, що й дана заявка, і яка подана 23 жовтня 2003 р. Якщо застосовується матриця калібрування, загальний МІМО-канал низхідної лінії зв'язку, як передбачається, може являти собою зворотну величину загального МІМО-каналу висхідної лінії зв'язку. Для простоти, нижченаведений опис передбачає, що канали передачі й прийому мають плоскі характеристики, матриця калібрування являє собою одиничну матрицю І, матриця загального МІМО-каналу низхідної лінії зв'язку являє собою HDL(k), матриця загального МІМОT каналу висхідної лінії зв'язку являє собою HUL(k), і HUL(k)=H DL(k) для TDD. Як для FDD, так і для TDD, вузол В може передавати M потоків символів по M рівнях на UE, де, в основному, 1Mmin{T, R}. Рівні можна розглядати як просторові канали МІМО-каналу. Аналогічно, UE може передавати M потоків символів по M рівнях на вузол В. Кількість потоків символів для посилки по висхідній лінії зв'язку може дорівнювати або може не дорівнювати кількості потоків символів для посилки по низхідній лінії зв'язку. Для ясності, нижче описується передача даних по низхідній лінії зв'язку. Гарні робочі характеристики можуть досягатися за допомогою передачі даних по власних модах МІМО-каналу. Власні моди можна розглядати як ортогональні просторові канали. Щоб 6 UA 97684 C2 5 передавати дані по власних модах, вузол В може одержувати матрицю попереднього кодування, основуючись на формуванні ідеального власного променя або на формуванні псевдовласного променя, і потім може виконувати попереднє кодування за допомогою матриці попереднього кодування. Таблиця 2 підсумує характеристики формування ідеального й псевдовласного променя. Таблиця 2 Тип формування променя Формування ідеального власного променя Формування псевдовласного променя 10 15 20 Для формування ідеального власного променя матриця HDL(k) МІМО-каналу низхідної лінії зв'язку може діагоналізуватися за допомогою розкладання по сингулярних числах наступним чином: H H D L ( k ) = U ( k ) ( k ) V ( k ) , Рівняння (7) де U( k ) являє собою унітарну матрицю розміру RxR лівих власних векторів HDL(k), V(k) являє собою унітарну матрицю розміру TxT правих власних векторів HDL(k), (k) являє собою діагональну матрицю розміру RxT сингулярних чисел HDL(k), і H " " означає ермітово або сполучене транспонування. Унітарна матриця має стовпці, які є ортогональними один одному, і кожний стовпець має одиничну потужність. Діагональна матриця має можливі ненульові значення по діагоналі й нулі в інших місцях. Сингулярні числа в (k) вказують на коефіцієнти підсилення каналу власних мод HDL(k), одержані за допомогою розкладання по сингулярних числах. Матриця V(k) також може згадуватися як матриця власного променя, матриця формування променя і т. д. Матриця V(k) власного променя також може бути одержана за допомогою виконання розкладання по власних значеннях коваріаційної матриці HDL(k). Розкладання по власних значеннях може бути виражене HH (k )H 25 30 35 40 Опис Матриця попереднього кодування виводиться на основі матриці МІМО-каналу Матриця попереднього кодування виводиться на основі матриці псевдопроменя (k ) V(k )(k )V H (k ) (k) (k)(k) i (k) H DL DL як , де являє собою діагональну матрицю власних значень HDL(k). Вузол В може передавати дані по M власних модах на UE, де 1Mmin{T, R}. Кількість власних мод (M) для використання для передачі даних також може згадуватися як ранг передачі даних. Матриця W IBF(k) попереднього кодування може бути сформована на основі M стовпців V(K) для M власних мод. В одній розробці W IBF(k) може бути сформована наступним чином: W I B F ( k ) =[,(k),… M ( k ) ] , Рівняння (8) де m(k) являє собою стовпець V(K) для m-тої вибраної власної моди, для m = 1, ... М, і W IBF(K) являє собою матрицю попереднього кодування розміру TxM для формування ідеального власного променя (IBF). В іншій розробці може підтримуватися кодова книга матриць попереднього кодування. W IBF(K) може бути сформована на основі матриці попереднього кодування в кодовій книзі, яка найбільш точно відповідає V(K), наприклад, має мінімальну відстань до V(K). Вузол В може виконувати масштабування символів і попереднє кодування для формування ідеального власного променя наступним чином: х I B F ( k ) = W I B F ( k ) G ( k ) d ( k ) , Рівняння (9) де d( k ) являє собою вектор розміру Mx1 символів даних для посилки по піднесучій к , G(K) являє собою діагональну матрицю розміру MxM коефіцієнтів підсилення для символів даних, і х ( k ) являє собою вектор розміру Tx1 виведених символів для піднесучої k . UE може одержувати прийняті символи від R антен, які можуть виражатися як: r(k ) HDL (k )xIBF (k ) n(k ) HDL (k )WIBF (k )G(k )d(k ) n(k ), 45 HEDL (k )d(k ) n(k ) Рівняння (10) де HEDL(K)=HDL(K)W IBF(K)G(K) ЯВЛЯЄ собою матрицю ефективного МІМО-каналу розміру RxM для формування ідеального власного променя, r ( k ) являє собою вектор розміру Rx1 прийнятих символів для піднесучої k , і n( k ) являє собою вектор розміру Rx1 шуму й перешкод для піднесучої k . 7 UA 97684 C2 H Шум і перешкоди можуть мати коваріаційну матрицю Rnn(k)=E{n(k)n (k)}, де Е { } означає очікування. Передбачається, що шум і перешкоди являють собою адитивний білий гаусів шум 2I 5 Z(k) H (k) 1 M(k) D(k) HH (k)HEDL (k) Rnn (k) HH (k), EDL EDL H 10 15 25 30 35 40 45 50 55 Рівняння (11) 1 H HEDL (k)HEDL (k), EDL (k )HEDL (k ) Rnn де і -1 D( k )=[ d ia gZ ( k ) ] являє собою діагональну матрицю значень масштабування для одержання нормалізованих оцінок символів. UE може виконувати виявлення МІМО наступним чином: € d ( k ) = M ( k ) r ( k ) , Рівняння (12) € де d ( k ) являє собою вектор розміру Mx1 оцінок символів для піднесучої k . € d являє собою оцінку d( k ) , що посилаються вузлом В. Відношення сигналу до шуму й перешкод (SINR) для кожної власної моди може бути виражене наступним чином: SINRm (k ) 20 2 (AWGN) з нульовим вектором середніх значень і коваріаційною матрицею R n n ( k ) = n , де n являє собою дисперсію шуму й перешкод. UE може виконувати виявлення МІМО, основуючись на мінімальній середньоквадратичній помилці (MMSE), корекції з форсуванням нуля, MMSE з послідовним заглушенням перешкод або деякому іншому методі виявлення МІМО. Для MMSE UE може виводити матрицю М( k ) виявлення розміру MxR для кожної піднесучої k наступним чином: z m (k ) , m 1,...,M, 1 z m (k ) Рівняння (13) де ZM(K) являє собою m-тий діагональний елемент Z(K), і SINRM(K) являє собою SINR власної моди т для піднесучої k . Взагалі, SINR може залежати від методу виявлення МІМО, використовуваного за допомогою UE. Різні методи виявлення МІМО можуть асоціюватися з різними рівняннями для обчислення SINR. Передбачення рангу може виконуватися (наприклад, за допомогою UE) для визначення M власних мод для використання для передачі даних. В одній розробці передбачення рангу загальної пропускної здатності може обчислюватися для кожної можливої комбінації власних мод, які можуть використовуватися для передачі даних. Для даної комбінації або гіпотези власних мод доступна потужність Pavail передачі може розподілятися по M власних модах у цій комбінації, основуючись на рівномірному розподілі потужності так, що Pm=Pavail/M, і Рm являє собою потужність передачі, розподілену власній моді m . Розподіл потужності також може основуватися на методі заповнення водою або деякому іншому методі. Матриця G(K) коефіцієнтів підсилення може обчислюватися на основі потужності передачі, розподіленої M власним модам. Матриця G(K) коефіцієнтів підсилення може включати в себе ненульовий коефіцієнт підсилення для кожної вибраної власної моди й нульовий коефіцієнт підсилення для кожній невибраної власної моді. Матриця HEDL(K) ефективного МІМО-каналу потім може визначатися на основі матриці HDL(K) МІМО-каналу, матриці W IBF(K) попереднього кодування й матриці G(K) коефіцієнтів підсилення. SINR M власних мод можуть визначатися на основі матриці HEDL(K) ефективного МІМО-каналу й коваріаційної матриці RNN(K) шуму, як описано вище. Загальна пропускна здатність для поточної гіпотези тоді може визначатися на основі SINR M власних мод. Описане вище обчислення може повторюватися для кожної можливої комбінації власних мод для одержання загальної пропускної здатності для цієї комбінації. Для передачі даних може вибиратися комбінація власних мод з найбільшою загальною пропускною здатністю. Передбачення рангу описується в заявці на патент США № 11/449893, що належить цьому ж правонаступнику, що й дана заявка, озаглавленій "ROBUST RANK PREDICTION FOR A MIMO SYSTEM", поданій 9 червня 2006 p. Для передачі по низхідній лінії зв'язку UE може перетворити SINR кожної з M власних мод у значення CQI, основуючись на заданому відображенні. UE може одержати інформацію про CQI для M власних мод, яка може містити (і) значення CQI для кожної власної моди, або (іі) базовий CQI для першої власної моди й дельта CQI для різниці між значеннями CQI наступних власних мод. UE може послати інформацію про CQI вузлу В. Вузол В може вибрати схему модуляції й кодування (MCS) для кожної власної моди, основуючись на значенні CQI для цієї власної моди. Для формування псевдовласного променя матриця псевдопроменя може бути сформована для кожної піднесучої к наступним чином: B(k ) hDL,1(k ),...,hDL,R (k ), bR 1(k ),...,bT (k ) , Рівняння(14) 8 UA 97684 C2 5 10 де hDL,i(k) являє собою вектор каналу розміру Tx1 для антени і UE, bi(k) являє собою випадковий вектор розміру Tx1, і В( k ) являє собою матрицю псевдопроменя розміру TxT. Як правило, В( k ) може бути сформована з нульовою або більшою кількістю векторів каналу в HDL(k) для нульової або більшої кількості антен UE. Кожний вектор hDL,i(k) каналу може відповідати одному рядку HDL(k). Інші стовпці В(k ) можуть являти собою випадкові вектори, які можуть бути стовпцями матриці дискретного перетворення Фур'є (DFT), матриці Адамара або Уолша або деякої іншої матриці. QR-розкладання матриці В( k ) псевдопроменя може бути виконане наступним чином: В ( k ) = Q ( k ) R ( k ) , Рівняння (15) де Q ( k ) являє собою ортогональну матрицю розміру TxT, що містить T ортогональних векторів, і R ( k ) являє собою верхню трикутну матрицю з нулями нижче діагоналі. qi (k ) 15 20 25 hDL,i (k ) h (k ) DL,i Q(K) може включати в себе вектор для кожного вектора каналу, використовуваного для В(k). Матриця W PBF(k) попереднього кодування може бути сформована на основі M стовпців Q ( k ) для M власних мод. В одній розробці, W PBF(K) може бути сформована наступним чином: W P B F ( k ) = [ q 1 ( k ) , . . . , q M ( k ) ] , Рівняння (16) де q m ( k ) являє собою стовпець Q(K) для m-тої вибраної власної моди, для m=1, ... М, і W PBF(K) являє собою матрицю попереднього кодування розміру TxM для формування псевдовласного променя (PBF). В іншому методі може підтримуватися кодова книга матриць попереднього кодування. W PBF(K) може бути сформована на основі матриці попереднього кодування в кодовій книзі, яка найбільш точно відповідає Q(K). Вузол В може виконувати масштабування символів і попереднє кодування для формування псевдовласного променя наступним чином: = ХPBF(K) W P B F ( k ) G ( k ) d ( k ) , Рівняння (17) де xPBF(K) являє собою вектор розміру Tx1 символів, що виводяться, для піднесучої i. UE може одержувати прийняті символи від R антен, які можуть бути виражені як: r(k ) HDL (k )x RBF (k ) n(k ) HDL (k )WPBF (k )G(k )d(k ) n(k ), 30 35 40 45 50 55 HEDL (k )d(k ) n(k ) Рівняння (18) де HEDL(K)=HDL(K)W PBF(K)G(K) ЯВЛЯЄ собою матрицю ефективного МІМО-каналу розміру RxM для формування псевдовласного променя. UE може виконувати виявлення МІМО, основуючись на MMSE. UE може виводити матрицю M(K) виявлення для кожної піднесучої k , як показано в рівнянні (11). UE потім може виконувати виявлення МІМО по прийнятих символах, як показано в рівнянні (12), для одержання оцінок символів. Вибір рангу може виконуватися (наприклад, за допомогою UE) для вибору M власних мод для використання для передачі даних по низхідній лінії зв'язку. Передбачення рангу може виконуватися так, як описано вище, хоча й з матрицею W PBF(k) попереднього кодування, одержаною на основі Q ( k ) замість V(K). SINR кожної власної моди може оцінюватися так, як описано вище, хоча й з матрицею W PBF(k) попереднього кодування замість W IBF(K). UE може одержувати інформацію про CQI для M власних мод, основуючись на SINR власних мод, і може посилати інформацію про CQI на вузол В. Вузол В може вибирати схему модуляції й кодування для кожної власної моди, основуючись на значеннях CQI для цієї власної моди. Таблиця 3 підсумує опорні сигнали й інформацію зворотного зв'язку, що посилаються вузлом В і UE для МІМО-передачі по низхідній лінії зв'язку, для формування ідеального власного променя й формування псевдовласного променя в системах як FDD, так і в TDD. Вузол В може передавати характерний для стільника опорний сигнал по низхідній лінії зв'язку. UE може оцінювати МІМО-канал низхідної лінії зв'язку, основуючись на характерному для стільника опорному сигналі. UE може одержувати матрицю попереднього кодування для формування або ідеального власного, або псевдовласного променя, основуючись на оцінці МІМО-каналу низхідної лінії зв'язку. UE також може виконувати передбачення рангу й визначати кількість рівнів або потоків (M) символів для посилки й значення CQI кожного рівня, основуючись на матриці попереднього кодування й іншій інформації. Для FDD UE може посилати інформацію зворотного зв'язку, що містить інформацію про CQI і інформацію про РМІ. Ранг M може (і) явно надаватися в інформації зворотного зв'язку, або (іі) неявно передбачатися 9 UA 97684 C2 розмірністю матриці попереднього кодування й/або кількістю значень CQI, що посилаються UE. Для TDD UE може посилати ту ж інформацію зворотного зв'язку, що й для FDD. Альтернативно, UE може посилати зондувальний опорний сигнал, який може використовуватися вузлом В для визначення матриці попереднього кодування. 5 Таблиця 3 FDD - формування ідеального власного променя Вузол В передає характерний для стільника опорний сигнал по низхідній лінії зв'язку UE посилає CQI, ранг і PMI FDD - формування псевдовласного променя Вузол В передає характерний для стільника опорний сигнал по низхідній лінії зв'язку TDD - формування псевдовласного променя Вузол В передає характерний для стільника опорний сигнал по низхідній лінії зв'язку UE посилає CQI, ранг і зондувальний опорний сигнал або PMI UE посилає CQI, ранг і PMI 10 15 20 25 30 35 40 45 TDD - формування ідеального власного променя Вузол В передає характерний для стільника опорний сигнал по низхідній лінії зв'язку UE посилає CQI, ранг і зондувальний опорний сигнал або PMI МІМО-передача по висхідній лінії зв'язку з формуванням ідеального власного променя й формуванням псевдовласного променя в системах FDD і TDD може виконуватися аналоговим чином у вигляді МІМО-передачі по низхідній лінії зв'язку. UE може передавати зондувальний опорний сигнал, який може використовуватися вузлом В для оцінки МІМО-каналу висхідної лінії зв'язку. Для FDD вузол В може посилати інформацію зворотного зв'язку, що містить інформацію про CQI і РМІ. Для TDD вузол В може посилати інформацію про CQI і або інформацію про РМІ, або характерний для стільника опорний сигнал. Фіг. 5 зображує розробку процесу 500 посилки даних у системі бездротового зв'язку. Процес 500 може виконуватися передавачем, яким може бути вузол В для передачі даних по низхідній лінії зв'язку, UE для передачі даних по висхідній лінії зв'язку або деякий інший об'єкт. Передавач може посилати перший опорний сигнал по першій лінії зв'язку на приймач (блок 512). Передавач може приймати інформацію про CQI, визначену приймачем, основуючись на першому опорному сигналі (блок 514). Передавач також може приймати другий опорний сигнал по другій лінії зв'язку від приймача (блок 516). Передавач може одержувати щонайменше одну матрицю H(k) МІМО-каналу для першої лінії зв'язку, основуючись на другому опорному сигналі, що приймається по другій лінії зв'язку, передбачаючи оборотність каналів (блок 518). Передавач може визначати щонайменше одну матрицю попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу (блок 520). Передавач потім може посилати передачу даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI (блок 522). В одній розробці блока 520, передавач може виконувати розкладання по сингулярних числах щонайменше однієї матриці H(K) МІМО-каналу для одержання щонайменше однієї матриці V(K) власних векторів, наприклад, як показано в рівнянні (7). Передавач може визначати щонайменше одну матрицю W IBF(A) попереднього кодування, основуючись на щонайменше одній матриці власних векторів, наприклад, як показано в рівнянні (8). В іншій розробці блока 520 передавач може формувати щонайменше одну матрицю B(K) псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу, наприклад, як показано в рівнянні (14). Передавач може виконувати QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці Q(K) ортогональних векторів, наприклад, як показано в рівнянні (15). Передавач потім може визначати щонайменше одну матрицю W PBF(K) попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів, наприклад, як показано в рівнянні (16). В іншій розробці блока 522, передавач може виконувати кодування й модуляцію для передачі даних, основуючись на інформації про CQI. Передавач може виконувати попереднє кодування для передачі даних, основуючись на щонайменше одній матриці попереднього кодування, наприклад, як показано в рівнянні (9) або (17). Фіг. 6 зображує розробку пристрою 600 для посилки даних у системі бездротового зв'язку. Пристрій 600 містить модуль 612 для посилки першого опорного сигналу по першій лінії зв'язку на приймач, модуль 614 для прийому інформації про CQI, що визначена приймачем, основуючись на першому опорному сигналі, модуль 616 для прийому другого опорного сигналу 10 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 по другій лінії зв'язку від приймача, модуль 618 для одержання щонайменше однієї матриці МІМО-каналу для першої лінії зв'язку, основуючись на другому опорному сигналі, що приймається по другій лінії зв'язку, модуль 620 для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу, і модуль 622 для посилки передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI. Фіг. 7 зображує розробку процесу 700 для прийому даних у системі бездротового зв'язку. Процес 700 може виконуватися приймачем, яким може бути UE для передачі даних по низхідній лінії зв'язку, вузол В для передачі даних по висхідній лінії зв'язку або деякий інший об'єкт. Приймач може приймати перший опорний сигнал по першій лінії зв'язку від передавача (блок 712). Приймач може визначати інформацію про CQI, основуючись на першому опорному сигналі (блок 714), і може посилати інформацію про CQI на передавач (блок 716). Приймач також може посилати другий опорний сигнал по другій лінії зв'язку (блок 718). Приймач може приймати передачу даних, що посилається передавачем, основуючись на інформації про CQI і щонайменше одній матриці попереднього кодування, яка може визначатися передавачем, основуючись на другому опорному сигналі (блок 720). Приймач може одержувати щонайменше одну матрицю H(k) МІМО-каналу для першої лінії зв'язку, основуючись на першому опорному сигналі (блок 722). Приймач може визначати щонайменше одну матрицю М(k ) виявлення, основуючись на щонайменше одній матриці МІМО-каналу, наприклад, як показано в рівнянні (11) (блок 724). Приймач може виконувати виявлення МІМО для прийнятої передачі даних, основуючись на щонайменше одній матриці виявлення, наприклад, як показано в рівнянні (12) (блок 726). В одній розробці, приймач може виконувати розкладання по сингулярних числах щонайменше однієї матриці H( k ) МІМО-каналу для одержання щонайменше однієї матриці V(k ) власних векторів. Приймач може визначати щонайменше одну матрицю W IBF(k) попереднього кодування, основуючись на щонайменше одній матриці власних векторів. В іншій розробці, приймач може формувати щонайменше одну матрицю В( k ) псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу. Приймач може виконувати QRрозкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці Q ( k ) ортогональних векторів. Приймач потім може визначати щонайменше одну матрицю W PBF(k) попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів. Для обох розробок, приймач може визначати щонайменше одну матрицю М( k ) виявлення, основуючись додатково на щонайменше одній матриці попереднього кодування. Приймач також може визначати інформацію про CQI, основуючись на щонайменше одній матриці попереднього кодування. Фіг. 5 і 7 можуть використовуватися для передачі даних по низхідній лінії зв'язку або висхідній лінії зв'язку. Для передачі даних по низхідній лінії зв'язку першим опорним сигналом може бути характерний для стільника опорний сигнал, що посилається по низхідній лінії зв'язку, і другим опорним сигналом може бути зондувальний опорний сигнал, що посилається по висхідній лінії зв'язку. Інформація про CQI може посилатися в щонайменше одному SC-FDMAсимволі по висхідній лінії зв'язку. Щонайменше один OFDM-символ може посилатися по низхідній лінії зв'язку для передачі даних. Для передачі даних по висхідній лінії зв'язку першим опорним сигналом може бути зондувальний опорний сигнал, що посилається по висхідній лінії зв'язку, і другим опорним сигналом може бути характерний для стільника опорний сигнал, що посилається по низхідній лінії зв'язку. Інформація про CQI може посилатися в щонайменше одному OFDM-символі по низхідній лінії зв'язку. Щонайменше один SC-FDMA-символ може посилатися по висхідній лінії зв'язку для передачі даних. Інформація про CQI також може згадуватися як інформація про MCS, інформація про транспортний формат, інформація про формат пакета, інформація про швидкість передачі, інформація зворотного зв'язку і т. д. Для передачі даних по низхідній лінії зв'язку або висхідній лінії зв'язку один з опорних сигналів (наприклад, характерний для стільника опорний сигнал) може генеруватися на основі псевдовипадкової послідовності, наприклад, як показано в рівнянні (1). Інший опорний сигнал (наприклад, зондувальний опорний сигнал) може генеруватися на основі послідовності CAZAC, наприклад, як показано в рівнянні (2) або (4). Опорні сигнали також можуть генеруватися іншим чином. Перший опорний сигнал може посилатися по піднесучих, розділених за допомогою першого проміжку. Другий опорний сигнал може посилатися по піднесучих, розділених за допомогою другого проміжку, що відрізняється від першого проміжку, наприклад, як показано на фіг. 3А і 3В. Фіг. 8 зображує розробку пристрою 800 для прийому даних у системі бездротового зв'язку. Пристрій 800 містить модуль 812 для прийому першого опорного сигналу по першій лінії зв'язку 11 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 від передавача, модуль 814 для визначення інформації про CQI, основуючись на першому опорному сигналі, модуль 816 для посилки інформації про CQI на передавач, модуль 818 для посилки другого опорного сигналу по другій лінії зв'язку, модуль 820 для прийому передачі даних від передавача, причому передача даних посилається на основі інформації про CQI і щонайменше однієї матриці попереднього кодування, визначеної передавачем, основуючись на другому опорному сигналі, модуль 822 для одержання щонайменше однієї матриці МІМОканалу для першої лінії зв'язку, основуючись на першому опорному сигналі, модуль 824 для визначення щонайменше однієї матриці виявлення, основуючись на щонайменше одній матриці МІМО-каналу, і модуль 826 для виконання виявлення МІМО для прийнятої передачі даних, основуючись на щонайменше одній матриці виявлення. Модулі на фіг. 6 і 8 можуть містити процесори, електронні пристрої, апаратні пристрої, електронні компоненти, логічні схеми, пам'ять і т. п. або будь-яку їх комбінацію. Методи формування власного променя, описані в даному документі, можуть забезпечувати деякі переваги. По-перше, формування власного променя може забезпечувати більш високе SINR, яке може приводити до більш високої пікової швидкості передачі даних, кращого покриттю і т. д. По-друге, ці методи можуть зменшувати величину зворотного зв'язку, що посилається приймачем на передавач. Фахівцеві в даній галузі техніки зрозуміло, що інформація й сигнали можуть представлятися з використанням будь-яких із численних технологій і методів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи й чипи, які можуть згадуватися у вищезгаданому описі, можуть представлятися напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-якою їх комбінацією. Фахівець у даній галузі техніки також візьме до уваги, що різні ілюстративні логічні блоки, модулі, схеми й етапи алгоритму, описані у зв'язку з розкриттям у даному документі, можуть бути реалізовані у вигляді електронних апаратних засобів, комп'ютерних програмних засобів або їх комбінацій. Щоб ясно проілюструвати цю взаємозамінність апаратних і програмних засобів, різні ілюстративні компоненти, блоки, модулі, схеми й етапи були описані вище, в основному, мовою їх функціональних можливостей. Реалізується така функціональна можливість у вигляді апаратних засобів або програмних засобів залежить від конкретного застосування й конструктивних обмежень, що накладаються на всю систему. Фахівець у даній галузі техніки може реалізувати описану функціональну можливість різними шляхами для кожного конкретного застосування, але такі рішення по реалізації не повинні інтерпретуватися як такі, що виходять з обсягу даного винаходу. Різні ілюстративні логічні блоки, модулі й схеми, описані у зв'язку з розкриттям у даному документі, можуть реалізовуватися або виконуватися за допомогою процесора загального призначення, процесора цифрової обробки сигналів (DSP), спеціалізованої інтегральної схеми (спеціалізованої IС), програмувальної вентильної матриці (FPGA) або іншого програмувального логічного пристрою, дискретної вентильної або транзисторної логіки, дискретних апаратних компонентів або будь-якої їх комбінації, призначеної для виконання функцій, описаних у даному документі. Процесором загального призначення може бути мікропроцесор, але, альтернативно, процесором може бути будь-який звичайний процесор, контролер, мікроконтролер або кінцевий автомат. Процесор також може бути реалізований у вигляді комбінації обчислювальних пристроїв, наприклад, комбінації DSP і мікропроцесора, множини мікропроцесорів, одного або декількох мікропроцесорів разом з ядром DSP або будь-якої іншої такої конфігурації. Етапи способу або алгоритму, описані у зв'язку з розкриттям у даному документі, можуть втілюватися безпосередньо апаратними засобами, програмним модулем, виконуваним процесором, або їх комбінацією. Програмний модуль може постійно знаходитися в пам'яті оперативного запам'ятовуючого пристрою (RAM), флеш-пам'яті, пам'яті постійного запам'ятовуючого пристрою (ROM), пам'яті стираного програмованого ROM (EPROM), пам'яті електрично стираного програмованого ROM (EEPROM), регістрах, на жорсткому диску, знімному диску, компакт-диску або запам'ятовуючому середовищі будь-якого іншого виду, відомому в техніку. Зразкове запам'ятовуюче середовище з'єднане із процесором так, що процесор може зчитувати інформацію із запам'ятовуючого середовища й записувати інформацію на нього. Альтернативно, запам'ятовуюче середовище може бути виконане за одне ціле із процесором. Процесор і запам'ятовуюче середовище можуть постійно знаходитися в спеціалізованій 1С. Спеціалізована IC може постійно знаходитися в користувацькому терміналі. Альтернативно, процесор і запам'ятовуюче середовище можуть постійно знаходитися як дискретні компоненти у користувацькому терміналі. В одній або декількох зразкових розробках, описані функції можуть бути реалізовані апаратними, програмними, апаратно-програмними засобами або будь-якою їх комбінацією. 12 UA 97684 C2 5 10 15 20 25 30 Якщо вони реалізовані програмними засобами, функції можуть зберігатися або передаватися у вигляді однієї або декількох інструкцій або коду на зчитуваному комп'ютером середовищі. Зчитуване комп'ютером середовище включає в себе як запам'ятовуюче середовище комп'ютера, так і середовище зв'язку, що включає в себе будь-яке середовище, яке сприяє пересиланню комп'ютерної програми з одного місця в інше. Запам'ятовуюче середовище може являти собою будь-яке доступне середовище, до якого може звертатися комп'ютер загального призначення або спеціального призначення. Як приклад, і не обмеження, таке зчитуване комп'ютером середовище може містити RAM, ROM, EEPROM, компакт-диск або інший запам'ятовуючий пристрій на оптичному диску, запам'ятовуючий пристрій на магнітних дисках або інші магнітні запам'ятовуючі пристрої, або будь-яке інше середовище, яке може використовуватися для перенесення або зберігання необхідного засобу програмного коду у вигляді інструкцій або структур даних і до якого може звертатися комп'ютер загального призначення або спеціального призначення або процесор загального призначення або спеціального призначення. Також, будь-яке з'єднання називається зчитуваним комп'ютером середовищем. Наприклад, якщо програмні засоби передаються з вебсайта, сервера або іншого віддаленого джерела, використовуючи коаксіальний кабель, волоконно-оптичний кабель, виту пару, цифрову абонентську лінію (DSL) або бездротові технології, такі як інфрачервоні, радіочастотні або мікрохвильові, тоді коаксіальний кабель, волоконно-оптичний кабель, вита пара, DSL або бездротові технології, такі як інфрачервоні, радіочастотні й мікрохвильові, включаються у визначення середовища. Диск (disk) і диск (disc), як використовується в даному документі, включають в себе компакт-диск (CD), лазерний диск, оптичний диск, цифровий багатофункціональний диск (DVD), дискету й диск Blu-ray (синьопроменевий диск), де диски (disk) звичайно відтворюють дані магнітним чином, тоді як диски (disc) відтворюють дані оптичним чином за допомогою лазерів. Комбінації вищезгаданого також повинні бути включені в обсяг зчитуваних комп'ютером середовищ. Попередній опис винаходу презентований для того, щоб надати можливість будь-якому фахівцеві в даній галузі техніки виконати або використовувати винахід. Різні модифікації винаходу легко очевидні для фахівця в даній галузі техніки, і узагальнені принципи, визначені в даному документі, можуть бути застосовані до інших варіантів без відступу від сутності або обсягу винаходу. Таким чином, винахід, як передбачається, не обмежується прикладами й варіантами, описаними тут, але повинен відповідати найбільшому обсягу, що узгоджується з принципами й новими ознаками, описаними в даному документі. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Спосіб передачі даних у системі бездротового зв'язку, який включає: посилку першого опорного сигналу по першій лінії зв'язку на приймач; прийом інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі; прийом другого опорного сигналу по другій лінії зв'язку від приймача; одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку; визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і посилку передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI. 2. Спосіб за п. 1, у якому визначення щонайменше однієї матриці попереднього кодування включає: виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів. 3. Спосіб за п. 1, у якому визначення щонайменше однієї матриці попереднього кодування включає: формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу; виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і 13 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів. 4. Спосіб за п. 1, у якому посилка передачі даних включає: виконання кодування й модуляції для передачі даних, основуючись на інформації про CQI; і виконання попереднього кодування для передачі даних, основуючись на щонайменше одній матриці попереднього кодування. 5. Спосіб за п. 1, у якому посилка першого опорного сигналу по першій лінії зв'язку включає посилку характерного для стільника опорного сигналу по низхідній лінії зв'язку, і в якому прийом другого опорного сигналу по другій лінії зв'язку включає прийом зондувального опорного сигналу по висхідній лінії зв'язку. 6. Спосіб за п. 1, у якому посилка першого опорного сигналу по першій лінії зв'язку включає посилку зондувального опорного сигналу по висхідній лінії зв'язку, і в якому прийом другого опорного сигналу по другій лінії зв'язку включає прийом характерного для стільника опорного сигналу по низхідній лінії зв'язку. 7. Спосіб за п. 1, у якому один з першого й другого опорних сигналів генерується на основі псевдовипадкової послідовності, і в якому другий один з першого й другого опорних сигналів генерується на основі послідовності нульової автокореляції з постійною амплітудою (CAZAC). 8. Спосіб за п. 1, у якому посилка першого опорного сигналу включає посилку першого опорного сигналу по піднесучих, розділених за допомогою першого проміжку, і в якому прийом другого опорного сигналу включає прийом другого опорного сигналу по піднесучих, розділених за допомогою другого проміжку, відмінного від першого проміжку. 9. Спосіб за п. 1, у якому прийом інформації про CQI включає прийом щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу), що містить інформацію про CQI, і в якому посилка передачі даних включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів (OFDMA-символу) для передачі даних. 10. Спосіб за п. 1, у якому прийом інформації про CQI включає прийом щонайменше одного символу багатостанційного доступу з ортогональним розділенням каналів (OFDMA-символу), що містить інформацію про CQI, і в якому посилка передачі даних включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу) для передачі даних. 11. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, сконфігурований з можливістю посилки першого опорного сигналу по першій лінії зв'язку на приймач; прийому інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі; прийому другого опорного сигналу по другій лінії зв'язку від приймача; одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку; визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і посилки передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI. 12. Пристрій за п. 11, у якому щонайменше один процесор сконфігурований з можливістю виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів, і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів. 13. Пристрій за п. 11, у якому щонайменше один процесор сконфігурований з можливістю формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу, виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів, і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів. 14. Пристрій за п. 11, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE). 15. Пристрій для бездротового зв'язку, який містить: засіб для посилки першого опорного сигналу по першій лінії зв'язку на приймач; 14 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 засіб для прийому інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі; засіб для прийому другого опорного сигналу по другій лінії зв'язку від приймача; засіб для одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку; засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і засіб для посилки передачі даних на приймач, основуючись на щонайменше одній матриці попереднього кодування й інформації про CQI. 16. Пристрій за п. 15, у якому засіб для визначення щонайменше однієї матриці попереднього кодування містить: засіб для виконання розкладання по сингулярних числах щонайменше однієї матриці МІМОканалу для одержання щонайменше однієї матриці власних векторів; і засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів. 17. Пристрій за п. 15, у якому засіб для визначення щонайменше однієї матриці попереднього кодування містить: засіб для формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу; засіб для виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і засіб для визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів. 18. Пристрій за п. 15, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE). 19. Зчитуваний комп'ютером носій, який містить: код, що викликає посилку щонайменше одним комп'ютером першого опорного сигналу по першій лінії зв'язку на приймач; код, що викликає прийом щонайменше одним комп'ютером інформації про індикатор якості каналу (CQI), визначеної приймачем, основуючись на першому опорному сигналі; код, що викликає прийом щонайменше одним комп'ютером другого опорного сигналу по другій лінії зв'язку від приймача; код, що викликає одержання щонайменше одним комп'ютером щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМО-каналу) для першої лінії зв'язку, основуючись на другому опорному сигналі, прийнятому по другій лінії зв'язку; код, що викликає визначення щонайменше одним комп'ютером щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці МІМО-каналу; і код, що викликає посилку передачі даних щонайменше одним комп'ютером на приймач, основуючись на щонайменше матриці попереднього кодування й інформації про CQI. 20. Спосіб прийому даних у системі бездротового зв'язку, який включає: прийом першого опорного сигналу по першій лінії зв'язку від передавача; визначення інформації про індикатор якості каналу (CQI), основуючись на першому опорному сигналі; посилку інформації про CQI на передавач; посилку другого опорного сигналу по другій лінії зв'язку; і прийом переданих даних, що посилаються передавачем, основуючись на інформації про CQI і щонайменше одній матриці попереднього кодування, визначеній передавачем, основуючись на другому опорному сигналі. 21. Спосіб за п. 20, який також включає: одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу), основуючись на першому опорному сигналі; визначення щонайменше однієї матриці виявлення, основуючись на щонайменше одній матриці МІМО-каналу; і виконання виявлення МІМО для прийнятої передачі даних, основуючись на щонайменше одній матриці виявлення. 22. Спосіб за п. 20, який також включає: 15 UA 97684 C2 5 10 15 20 25 30 35 40 45 50 55 одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу), основуючись на першому опорному сигналі; виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів, і в якому визначення інформації про CQI включає визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування. 23. Спосіб за п. 20, який також включає: одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу), основуючись на першому опорному сигналі; формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу; виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; і визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів, і в якому визначення інформації про CQI включає визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування. 24. Спосіб за п. 20, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE). 25. Спосіб за п. 20, у якому один з першого й другого опорних сигналів генерується на основі псевдовипадкової послідовності, і в якому інший один з першого й другого опорних сигналів генерується на основі послідовності нульової автокореляції з постійною амплітудою (CAZAC). 26. Спосіб за п. 20, у якому посилка інформації про CQI включає посилку щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів на одній несучій (SC-FDMA-символу), що містить інформацію про CQI, і в якому прийом передачі даних включає прийом щонайменше одного символу багатостанційного доступу з ортогональним частотним розділенням каналів (OFDMA-символу) для передачі даних. 27. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, сконфігурований з можливістю прийому першого опорного сигналу по першій лінії зв'язку від передавача; визначення інформації про індикатор якості каналу (CQI), основуючись на першому опорному сигналі; посилки інформації про CQI на передавач; посилки другого опорного сигналу по другій лінії зв'язку; і прийому передачі даних, що посилається передавачем, основуючись на інформації про CQI і щонайменше одній матриці попереднього кодування, визначеній передавачем, основуючись на другому опорному сигналі. 28. Пристрій за п. 27, у якому щонайменше один процесор сконфігурований з можливістю одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу), основуючись на першому опорному сигналі; виконання розкладання по сингулярних числах щонайменше однієї матриці МІМО-каналу для одержання щонайменше однієї матриці власних векторів; визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці власних векторів; і визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування. 29. Пристрій за п. 27, у якому щонайменше один процесор сконфігурований з можливістю одержання щонайменше однієї матриці каналу з множиною входів й множиною виходів (МІМОканалу), основуючись на першому опорному сигналі; формування щонайменше однієї матриці псевдопроменя, основуючись на щонайменше одній матриці МІМО-каналу; виконання QR-розкладання щонайменше однієї матриці псевдопроменя для одержання щонайменше однієї матриці ортогональних векторів; визначення щонайменше однієї матриці попереднього кодування, основуючись на щонайменше одній матриці ортогональних векторів; і 16 UA 97684 C2 5 визначення інформації про CQI, основуючись на щонайменше одній матриці попереднього кодування. 30. Пристрій за п. 27, у якому один з першого й другого опорних сигналів містить характерний для стільника опорний сигнал, що посилається вузлом В, і в якому інший один з першого й другого опорних сигналів містить зондувальний опорний сигнал, що посилається користувацьким обладнанням (UE). 17 UA 97684 C2 18 UA 97684 C2 19 UA 97684 C2 20 UA 97684 C2 21 UA 97684 C2 22 UA 97684 C2 23 UA 97684 C2 24 UA 97684 C2 25 UA 97684 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 26
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for precoding matrix determination in multiple-input multiple-output (mimo) system
Автори англійськоюSarkar, Sandip, Kim, Byoung-Hoon, Malladi, Durga Prasad, Montojo, Juan
Назва патенту російськоюУстройство и способ определения матрицы предварительного кодирования в системе с множеством входов и множеством выходов (mimo)
Автори російськоюСаркар Сандип, Ким Биоунг-Хоон, Маллади Дурга Прасад, Монтохо Хуан
МПК / Мітки
МПК: H04B 7/04, H04L 25/02
Мітки: кодування, виходів, мімо, входів, попереднього, системі, пристрій, множиною, спосіб, матриці, визначення
Код посилання
<a href="https://ua.patents.su/28-97684-pristrijj-i-sposib-viznachennya-matrici-poperednogo-koduvannya-v-sistemi-z-mnozhinoyu-vkhodiv-jj-mnozhinoyu-vikhodiv-mimo.html" target="_blank" rel="follow" title="База патентів України">Пристрій і спосіб визначення матриці попереднього кодування в системі з множиною входів й множиною виходів (mimo)</a>
Спосіб і пристрій для обробки даних для передачі та блок передавача в кодованих системах з множиною входів та множиною виходів з вибірковою інверсією каналів, що застосовується на кожній власній моді
Номер патенту: 84684
Опубліковано: 25.11.2008
Автори: Уолтон Джей Род, Кетчум Джон У., Мєдвєдєв Іріна
МПК: H04L 1/02, H04B 7/005
Мітки: обробки, системах, кожній, інверсією, пристрій, власній, блок, передачі, застосовується, кодованих, входів, спосіб, моди, каналів, множиною, передавача, даних, вибірковою, виходів
Формула / Реферат:
1. Спосіб обробки даних для передачі у системі зв'язку з множиною входів, множиною виходів (МІМО), що включає етапи, на якихорганізовують множину наявних каналів передачі у множину груп; і для кожної групи каналів передачі, яка повинна використовуватися для передачі даних:вибирають один або більше каналів передачі у групі для використання і визначають масштабний коефіцієнт для кожного вибраного каналу передачі...
Пілот-сигнали для комунікаційної системи з множиною входів і множиною виходів (мімо)
Номер патенту: 83472
Опубліковано: 25.07.2008
Автори: Уоллейс Марк, Кетчум Джон У., Уолтон Джей Р., Говард Стівен Дж.
МПК: H04L 25/02, H04L 1/02
Мітки: системі, мімо, пілот-сигнали, множиною, виходів, комунікаційної, входів
Формула / Реферат:
1. Спосіб генерації пілот-сигналу у безпровідній комунікаційній системі з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:одержують пілотний символ для кожної антени з множини антен;одержують ортогональну послідовність для кожної антени з множини антен, причому множині антен призначають різні ортогональні послідовності; івиконують покривання пілотного символу длякожної антени ортогональною...
Системи і способи формування діаграми спрямованості антени в системах зв’язку з множиною входів і множиною виходів
Номер патенту: 92741
Опубліковано: 10.12.2010
Автори: Горе Дхананджай Ашок, Кадоус Тамер, Горохов Алєксєй, Сампатх Хемантх
МПК: H04L 27/26, H04B 7/06
Мітки: множиною, антени, входів, виходів, способи, зв'язку, спрямованості, системі, системах, діаграми, формування
Формула / Реферат:
1. Апаратура безпровідного зв'язку, яка містить: щонайменше дві антени; іпроцесор, сконфігурований для генерації вагових коефіцієнтів для формування діаграми спрямованості антени для передачі символів в пристрій безпровідного зв'язку на основі інформації про канал, яка відповідає декільком трактам передачі, кількість яких більша одного, але менша, ніж загальна кількість трактів передачі з апаратури безпровідного зв'язку в пристрій...
Передача даних з нерівномірним розподілом швидкостей передачі даних для системи з множиною входів і множиною виходів (мімо)
Номер патенту: 87807
Опубліковано: 25.08.2009
Автор: Кадоус Тамер
МПК: H04B 1/69, H04J 11/00
Мітки: розподілом, нерівномірним, передача, системі, входів, мімо, даних, передачі, швидкостей, множиною, виходів
Формула / Реферат:
1. Спосіб визначення швидкостей даних для множини потоків даних, які підлягають передачі через множину каналів передачі у багатоканальній системі зв’язку, який міститьвизначення необхідного відношення сигналу до шуму і перешкоди, згадуваного далі як SNR, для кожної з швидкостей даних, які підлягають використанню для множини потоків даних, причому щонайменше дві з швидкостей передачі даних неоднакові;визначення ефективного SNR...
Системи і способи для формування променя і регулювання швидкості у системах зв’язку з множиною входів і множиною виходів

Номер патенту: 91538
Опубліковано: 10.08.2010
Автори: Горохов Алєксєй, Кадоус Тамер, Сампатх Хемантх, Горе Дхананджай Ашок
МПК: H04L 27/26
Мітки: виходів, зв'язку, системах, формування, швидкості, системі, множиною, променя, способи, входів, регулювання
Попередній патент: Ін’єкційний пристрій і спосіб зняття ковпачка з ін’єкційного пристрою
Наступний патент: Регульований радіальний гідростатичний підшипник
Випадковий патент: Доїльний стакан