Спосіб і система для моніторингу збирання врожаю для машини для збирання врожаю і спосіб калібрування датчика масової витрати у машині для збирання врожаю
Формула / Реферат
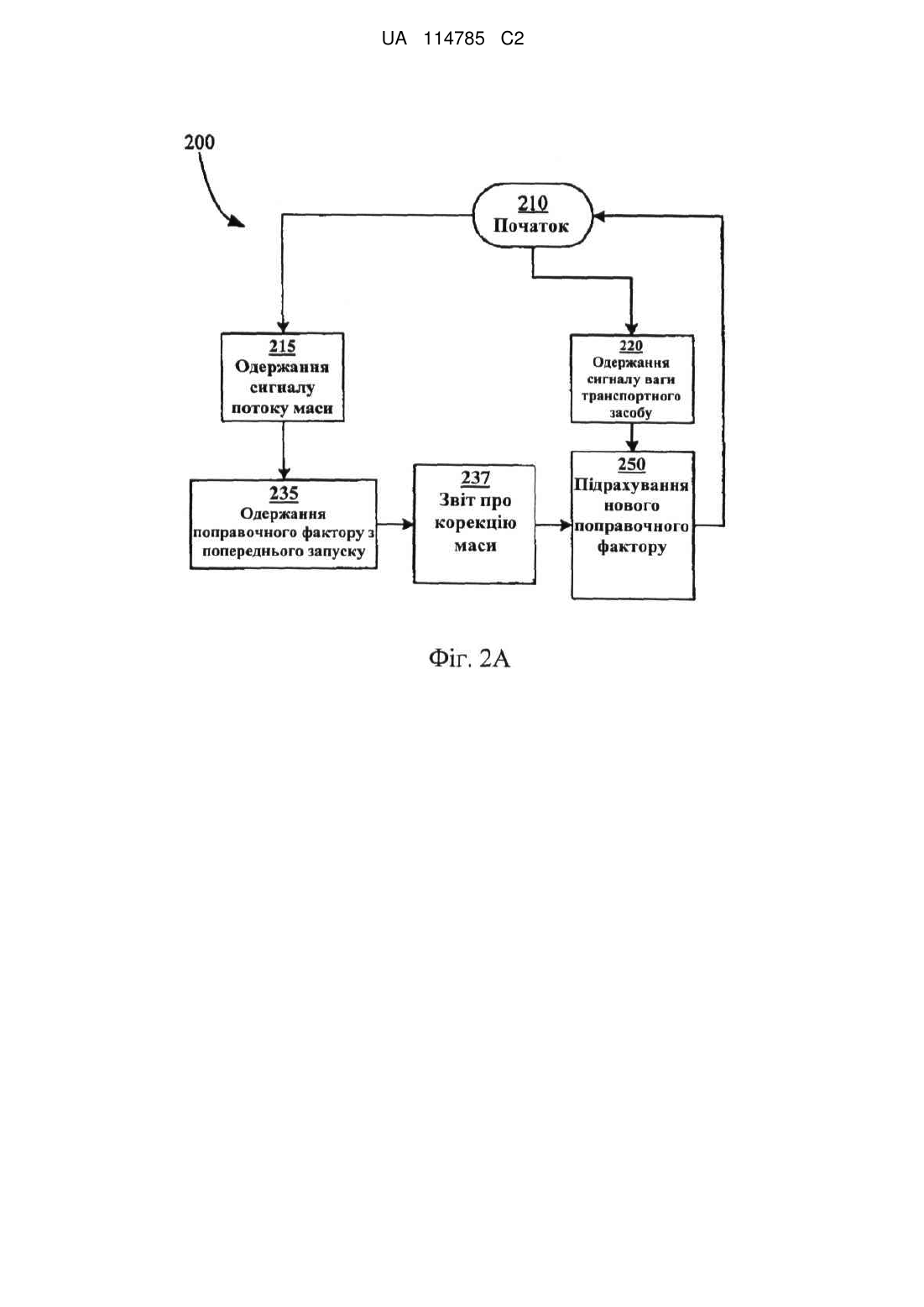
1. Спосіб моніторингу кількості зібраного врожаю при збиранні врожаю зерна з машиною для збирання урожаю, який включає:
шляхом використання датчика величини потоку маси, який розміщений для вимірювання величини потоку маси зерна в машині для збирання врожаю, генерування сигналу величини потоку, пов'язаного з величиною потоку зерна в машину для збирання врожаю;
генерування сигналу ваги, пов'язаного з вагою зернового бака машини для збирання врожаю, де елеватор проходить через стінку зазначеного зернового бака; та
під час збирання зерна кореляцію зазначеного сигналу величини потоку з зазначеним сигналом ваги для моніторингу кількості зібраного врожаю.
2. Спосіб за п. 1, в якому зазначений етап кореляції зазначеного сигналу величини потоку і зазначеного сигналу ваги включає в себе:
визначення величини зміни зазначеного сигналу ваги; і
порівняння зазначеної величини зміни зазначеного сигналу ваги до зазначеного сигналу величини потоку.
3. Спосіб за п. 1, в якому зазначений етап кореляції зазначеного сигналу величини потоку і зазначеного сигналу ваги включає в себе:
інтегрування зазначеного сигналу величини потоку за період, щоб обчислити основану на потоці оцінку зміни ваги;
визначення зміни в сигналі ваги за зазначений період запису, щоб обчислити основану на вазі оцінку зміни ваги; і
порівняння зазначеної основаної на вазі оцінки зміни ваги з основаною на потоці оцінкою зміни ваги.
4. Спосіб за п. 1, який додатково включає:
визначення помилки, пов'язаної із зазначеним сигналом величини потоку; та
корекцію зазначеного сигналу величини потоку.
5. Спосіб за п. 1, в якому етап генерування зазначеного сигналу ваги включає в себе:
забезпечення системи зважування транспортного засобу, виконаної з можливістю генерувати зазначений сигнал ваги, зазначена система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги.
6. Спосіб за п. 5, в якому етап генерування зазначеного сигналу ваги додатково включає в себе:
проведення процедури калібрування в той час, коли зазначена вага машини для збирання врожаю залишається практично незмінною; та
визначення першого поправкового фактора, пов'язаного із згаданим першим датчиком ваги, і другого поправкового фактора, асоційованого з вказаним другим датчиком ваги, так що вказаний сигнал ваги залишається по суті постійним протягом зазначеної процедури калібрування.
7. Спосіб за п. 5, в якому етап генерування зазначеного сигналу ваги додатково включає в себе:
зміну відомої ваги зазначеної машини для збирання врожаю, так що зазначений сигнал ваги змінюється; і
визначення першого поправкового фактора, пов'язаного із зазначеним першим датчиком ваги, та
другого поправкового фактора, пов'язаного з зазначеним другим датчиком ваги, таким чином, що різниця в зазначеному сигналі ваги відповідає зазначеній відомій вазі.
8. Спосіб за п. 1, який додатково включає:
визначення помилки, пов'язаної із зазначеним сигналом величини потоку, на основі зазначеного сигналу ваги;
корекцію зазначеного сигналу величини потоку з використанням зазначеної помилки для генерування скорегованих вимірів потоку маси, та
відображення зазначених скорегованих вимірів потоку маси.
9. Спосіб за п. 1, який додатково включає:
генерування критерію якості даних, пов'язаного з зазначеним сигналом ваги;
порівняння зазначеного критерію якості даних з бажаним діапазоном;
визначення помилки, пов'язаної із зазначеним сигналом величини потоку, з використанням значення зазначеного сигналу ваги, записаного у той час, коли зазначений критерій якості даних був у зазначеному бажаному діапазоні;
корекцію зазначеного сигналу величини потоку з використанням зазначеної помилки для генерування виправленого виміру величини потоку; та
відображення зазначеного скорегованого вимірювання величини потоку.
10. Система моніторингу кількості зібраного врожаю при збиранні врожаю зерна з машиною для збирання врожаю, що містить:
датчик потоку маси, виконаний з можливістю генерувати сигнал величини потоку, що відповідає величині потоку зерна в машину для збирання врожаю;
систему зважування транспортного засобу, яка включає датчик ваги, де зазначена система зважування транспортного засобу виконана з можливістю генерування сигналу, що відповідає вазі частини машини для збирання врожаю, зазначена система зважування транспортного засобу включає пристрій вимірювання переміщення, який розміщено на осі машини для збирання врожаю; та
схему обробки з електричним зв'язком з зазначеним датчиком потоку маси та зазначеної системи зважування транспортного засобу, зазначена схема обробки виконана з можливістю обчислення помилки у зазначеному сигналі величини потоку з використанням зазначеного сигналу ваги.
11. Система за п. 10, в якій зазначена схема обробки додатково виконана з можливістю обчислення скорегованої величини потоку маси на основі зазначеної помилки.
12. Система за п. 10, що додатково включає:
датчик якості даних, виконаний з можливістю генерувати критерій якості даних, пов'язаний з зазначеною системою зважування транспортного засобу, зазначений датчик якості даних знаходиться в електричному зв'язку з зазначеною схемою обробки.
13. Система за п. 12, в якій зазначений датчик містить одне з гіроскопа, акселерометра, датчика швидкості, датчика ваги шнека, системи GPS та датчика тиску в хедері.
14. Система за п. 12, в якій зазначена схема обробки додатково виконана з можливістю порівняння зазначеного критерію якості даних з порогом, і в якій зазначена схема обробки додатково виконана з можливістю не брати до уваги зазначений сигнал ваги, коли зазначений критерій якості даних входить в небажаний діапазон, визначений зазначеним порогом.
15. Система за п. 10, в якій зазначений датчик ваги включає в себе тензодатчик навантаження частини ваги машини для збирання врожаю.
16. Система за п. 10, в якій зазначений датчик ваги включає в себе датчик, виконаний з можливістю вимірювати деформацію несучого елемента машини для збирання врожаю.
17. Спосіб калібрування датчика потоку маси машини для збирання врожаю при збиранні врожаю зерна, який включає:
перехоплення потоку зерна датчика потоку маси;
вимірювання величини потоку маси зазначеного зерна зазначеним датчиком потоку маси для отримання виміряної величини потоку маси;
зберігання зазначеного зерна в зерновому баку на машині для збирання врожаю;
отримання вимірювань ваги частини зазначеної машини для збирання врожаю, що включає в себе зазначений зерновий бак в перший момент часу і в другий момент часу, щоб отримати виміряну зміну ваги зерна;
порівняння зазначеної виміряної зміни ваги зерна з зазначеною виміряною величиною потоку маси;
визначення помилки в зазначених вимірюваннях величини потоку маси, що базується на зазначеній зміні ваги зерна під час збирання врожаю зерна, та
корегування подальшого вимірювання величини потоку маси, що базується на основі зазначеної помилки.
18. Спосіб за п. 17, який додатково включає:
виконання відповідної процедури калібрування до відомої зміни у вазі;
порівняння зазначеної виміряної зміни ваги зерна з відомою зміною ваги зерна, і
визначення поправкового фактора для корекції зазначеної виміряної зміни ваги зерна з зазначеної відомої зміни ваги зерна;
застосування множника для подальшого вимірювання ваги.
19. Спосіб за п. 17, який додатково включає:
отримання сигналів, пов'язаних з надійністю зазначених вимірювань ваги, і фільтрування зазначеного вимірювання ваги на основі зазначеного сигналу.
20. Спосіб за п. 17, в якому зазначений етап порівняння зазначеної виміряної зміни ваги зерна з зазначеною виміряною величиною потоку маси включає в себе:
визначення величини зміни ваги зерна, накопиченої суми зазначеної величини потоку маси і величини зміни зазначеної накопиченої суми; і
порівняння величини зміни ваги зерна з зазначеною величиною зміни зазначеної накопиченої суми.
21. Спосіб за п. 17, в якому згаданий етап порівняння згаданої виміряної зміни ваги зерна до зазначеної виміряної величини потоку маси включає в себе:
інтегрування зазначеної виміряної величини потоку маси протягом періоду запису, щоб отримати оцінку зміни ваги на основі потоку;
визначення зміни в сигналі ваги за зазначений період запису для отримання оцінки зміни ваги на основі ваги; і
порівняння зазначеної оцінки зміни ваги на основі потоку до зазначеної оцінки зміни ваги на основі ваги.
22. Спосіб за п. 17, в якому етап отримання вимірювань ваги частини зазначеної машини для збирання врожаю включає в себе:
отримання зазначених вимірювань ваги з системою зважування транспортного засобу, при цьому система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги.
23. Спосіб за п. 22, в якому етап отримання вимірювань ваги частини зазначеної машини для збирання урожаю додатково включає в себе:
проведення процедури калібрування в той час, як маса зазначеної машини для збирання врожаю залишається по суті незміненою; і
визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і
другого калібрувального коефіцієнта, пов'язаного з зазначеним другим датчиком ваги, таким чином, що виміряна калібрована вага зазначеної машини для збирання врожаю залишається по суті постійною протягом зазначеної процедури калібрування.
24. Спосіб за п. 22, в якому етап отримання вимірювання ваги частини зазначеної машини для збирання урожаю додатково включає в себе:
змінювання відомої маси зазначеної машини для збирання урожаю таким чином, що змінюється сигнал ваги;
і
визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і
другого калібрувального коефіцієнта, пов'язаного з зазначеним другим датчиком ваги, таким чином, що виміряна зміна ваги зерна відповідає зазначеній відомій вазі.
25. Спосіб за п. 17, який додатково включає в себе:
генерування критерію якості даних, асоційованого з зазначеними вимірюваннями ваги;
порівняння зазначеного критерію якості даних в бажаному діапазоні;
визначення помилки, пов'язаної із значенням виміряної величини потоку маси з використанням одного із зазначених вимірювань ваги, які записані під час того, коли зазначений критерій якості даних був в межах зазначеного необхідного діапазону;
корегування виміряної величини потоку маси з використанням зазначеного повідомлення про помилку для генерації скорегованої величини потоку маси; і
відображення зазначеної скорегованої величини потоку маси.
26. Спосіб за п. 17, в якому згаданий етап визначення помилки у зазначених вимірюваннях величини маси потоку на основі зазначеної зміни ваги зерна здійснюється шляхом обробки схеми, сконфігурованої для обчислення скорегованої величини маси потоку на основі зазначеної точності.
27. Спосіб за п. 26, який додатково включає:
генерування критерію якості даних з датчика, при цьому вказаний датчик знаходиться в електричному зв'язку зі згаданою схемою обробки.
28. Спосіб за п. 27, в якому вказаний датчик містить одне з гіроскопа, акселерометра, датчика швидкості, датчика ваги шнека, системи GPS і датчика тиску в хедері.
29. Спосіб за п. 28, який додатково включає:
порівняння зазначеного критерію якості даних з порогом; і
без урахування сигналу ваги, коли згаданий критерій якості даних вводить небажаний діапазон зазначеного порогу.
30. Спосіб за п. 17, який додатково включає:
вимірювання деформації несучого елемента машини для збирання врожаю.
31. Спосіб за п. 17, який додатково включає:
генерування сигналу ваги за допомогою тензодатчика, де зазначений тензодатчик вимірює навантаження частини ваги машини для збирання врожаю.
32. Спосіб за п. 17, в якому елеватор проходить через стінки згаданого зернового бака.
33. Спосіб моніторингу збирання врожаю під час збирання зерна машиною для збирання врожаю, причому зазначений спосіб включає:
за допомогою датчика виміряної величини потоку маси, розташованого для вимірювання величини потоку маси зерна в машині для збирання врожаю, генерують сигнал швидкості потоку маси, пов'язаної зі швидкістю потоку зерна в машині для збирання врожаю;
генерування сигналу ваги, пов'язаного з масою машини для збирання врожаю;
моніторингу критерію якості даних, пов'язаного з вказаним сигналом ваги;
калібрування згаданого сигналу швидкості потоку із зазначеним сигналом ваги для того, щоб генерувати калібрований сигнал швидкості потоку;
оцінювання врожайності на основі зазначеного каліброваного сигналу швидкості потоку;
визначення того, чи згаданий критерій якості даних перевищує згаданий довірений поріг; і,
при визначенні того, що вказаний критерій якості даних перевищує зазначений поріг, скасування калібрування зазначеного сигналу величини потоку із зазначеним сигналом ваги.
34. Спосіб за п. 33, в якому згаданий етап калібрування згаданого сигналу величини потоку із зазначеним сигналом ваги включає в себе:
визначення швидкості зміни зазначеного сигналу ваги; і
порівняння швидкості зміни зазначеного сигналу ваги на вказаний сигнал величини потоку.
35. Спосіб за п. 33, в якому згаданий етап калібрування згаданого сигналу величини потоку із зазначеним сигналом ваги включає в себе:
інтегрування сигналу величини потоку протягом періоду запису, щоб отримати оцінку зміни ваги на основі потоків;
визначення зміни сигналу ваги за заначений період запису для отримання оцінки зміни ваги на основі ваги; і
порівняння зазначеної витрати потоку на основі оцінки зміни ваги для зазначеної ваги на основі оцінки зміни ваги.
36. Спосіб за п. 33, який додатково включає в себе:
визначення помилки, пов'язаної із зазначеним сигналом витрати потоку; і
корегування згаданого сигналу витрати потоку.
37. Спосіб за п. 33, в якому етап генерації зазначеного сигналу ваги включає в себе:
забезпечення системи зважування транспортного засобу, сконфігурованої для формування згаданого сигналу ваги, при цьому система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги.
38. Спосіб за п. 37, в якому етап генерації зазначеного сигналу ваги далі включає:
проведення процедури калібрування, в той час як при цьому вага машини для збирання врожаю залишається практично незмінною; і
визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного із зазначеним другим датчиком ваги, таким чином, що сигнал ваги залишається по суті постійним протягом зазначеної процедури калібрування.
39. Спосіб за п. 37, в якому етап генерування зазначеного сигналу ваги далі включає:
змінювання відомої ваги зазначеної машини для збирання урожаю таким чином, щоб змінювався сигнал ваги; і
визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного зі згаданим другим датчиком ваги, таким чином, що різниця в зазначеному сигналі ваги відповідає зазначеній відомій вазі.
40. Спосіб за п. 33, який додатково включає в себе:
визначення помилки, пов'язаної із зазначеним сигналом витрати потоку, на основі зазначеного сигналу ваги;
корегування згаданого сигналу витрати потоку з використанням зазначеної помилки для генерації скорегованого вимірювання витрати потоку; і
відображення зазначеного скорегованого вимірювання витрати потоку.
41. Спосіб за п. 33, який додатково включає в себе:
визначення помилки, пов'язаної із зазначеним сигналом витрати потоку, використовуючи значення зазначеного сигналу ваги, записаного в той час, як зазначений критерій якості даних був в межах зазначеного бажаного діапазону;
корегування згаданого сигналу витрати потоку з використанням зазначеної помилки для генерації скорегованого вимірювання витрати потоку; і
відображення зазначеного скорегованого вимірювання витрати потоку.
42. Спосіб за п. 33, який відрізняється тим, що критерій якості даних перевищує зазначене довірене порогове значення даних під час операцій вивантаження зернового бака.
43. Спосіб за п. 42, який відрізняється тим, що критерій якості даних вимірюється визначенням ваги розвантажувального шнека машини для збирання врожаю.
44. Спосіб за п. 33, який відрізняється тим, що критерій якості даних включає динамічний критерій транспортного засобу машини для збирання урожаю.
45. Спосіб за п. 33, який відрізняється тим, що критерій якості даних містить нахил комбайна.
46. Спосіб за п. 45, в якому згаданий нахил комбайна вимірюється за допомогою гіроскопічної рамки, встановленої на машині для збирання урожаю.
47. Спосіб за п. 33, який відрізняється тим, що критерій якості даних перевищує зазначений довірений поріг, коли хедер машини для збирання урожаю контактує з землею.
48. Спосіб за п. 47, в якому зазначений критерій якості даних вимірюється за допомогою датчика тиску, пов'язаного з виконавчим механізмом, і в якому вказаний виконавчий механізм визначає положення згаданого хедера.
49. Спосіб за п. 48, який відрізняється тим, що критерій якості даних визначається посиланням на відому вагу зазначеного хедера.
50. Спосіб за п. 33, який відрізняється тим, що критерій якості даних пов'язаний з фантомним корисним навантаженням, що містить частину зазначеного сигналу ваги.
51. Спосіб за п. 50, в якому зазначене фантомне корисне навантаження визначають шляхом порівняння першого виміряного відхилення, виконаного першим пристроєм, і другого виміряного відхилення, виконаного другим пристроєм.
52. Спосіб за п. 51, в якому згаданий перший пристрій і вказаний другий пристрій включають тензометри, встановлені на машині для збирання врожаю і розташовані для вимірювання відхилення несучих компонентів машини для збирання врожаю.
Текст
Реферат: Система та способи для моніторингу кількості зібраних плодів під час збирання врожаю з машиною для збирання врожаю. В одному втіленні датчик величини потоку маси вимірює величину потоку маси зібраного врожаю зерна. Датчик ваги вимірює вагу зібраного врожаю зерна. Виміряна величина потоку маси співвідноситься з вагою зібраного врожаю зерна. Оброблювальна електросхема підраховує кожну помилку при вимірюванні величини потоку маси зібраного врожаю зерна з використанням виміряної ваги. Підраховані помилки використовуються для корекції кожної неточності при вимірюванні величини потоку маси. UA 114785 C2 (12) UA 114785 C2 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 ГАЛУЗЬ ТЕХНІКИ: Засоби моніторингу збору врожаю для сільськогосподарських машин для збору врожаю. РІВЕНЬ ТЕХНІКИ Фіг. 1A показує умовну машину для збирання врожаю або комбайн 10. В той час, коли оператор в кабіні 12 керує комбайном на полі, сільськогосподарська культура, врожай якої збирається, волочиться через хедер 15, який збирає рослинний матеріал та подає його до приймальної камери молотарки 16. Приймальна камера молотарки 16 переносить рослинний матеріал до комбайну, де зерно відокремлюється від іншого рослинного матеріалу. Тоді відокремлене зерно переноситься вверх зерновим елеватором 120 (Фіг. 1В) до фонтанного шнеку 150, який переносить зерно до зернового баку 20. Інший рослинний матеріал розвантажується позаду комбайна. Коли зерновий бак стає заповненим, перевізна машина, така як зерновий візок, фургон або вантажний автомобіль, рухається до найближчого комбайну, або комбайн рухається до очікувальної перевізної машини. Розвантажувальний шнек 30 коливається зовні, до тих пір, поки кінець розміщується над очікувальною перевізною машиною. Поперечний шнек 35, що розташований на днищі зернового баку 20, подає зерно до видовженого розвантажувального шнеку 30, який поворотом розміщує зерно в очікувальній перевізній машині знизу. З рівня техніки відомий моніторинг наживо або в реальному часі протягом збирання врожаю сільськогосподарської культури. Існує тип промислового наявного відображення кількості зібраних плодів з використанням датчику потоку маси, такого як датчик потоку маси 130, зображеного на Фіг. 1В та розкритим в патенті США № 5,343,761, який включений в даний опис у всій своїй повноті за допомогою посилання. Відповідно до Фіг. 1В, в той час, коли зерно 110 розвантажується з зернового елеватора 120, воно ударяється об ударну плиту 140. Датчики, що поєднані з датчиком потоку маси 130, виробляють напругу, залежну від сили, прикладеної до ударної плити 140. Об'ємний потік зерна може бути підрахованим, базуючись на напрузі, таким чином, що датчик потоку маси 130 визначає величину зернового потоку, пов'язану з зерном з комбайну 10. Такі системи також використовують різноманітні способи записування швидкості комбайну під час роботи. Використання швидкості та ширини шляху, з якого збирають урожай (зазвичай, ширина хедера), надає можливість визначити величину зібраних плодів у бушелях на одиницю площі, шляхом ділення маси зібраного врожаю зерна за визначений період часу на площу, де збирався врожай. В додаток до повідомлення поточної величини кількості зібраних плодів, такі системи часто включають GPS або інші системи позиціонування для того, щоб асоціювати кожну повідомлену величину кількості зібраних плодів з окремим місцеположенням на полі. Таким чином, можуть бути створеними мапи кількості зібраних плодів для довідки в наступні сезони. Більшість промислово наявних систем також використовують датчик, щоб визначати вологість зерна, в той час, коли урожай зібрано. Визначення вологості зерна дозволяє оператору визначити ймовірний час або кошти, необхідні для сушіння зібраного врожаю сільськогосподарської культури та також дозволяє відображенням кількості зібраних плодів надавати більш корисні дані кількості зібраних плодів з поправкою на вміст води. Як результат того, що зерно сушать перед тривалим зберіганням та реалізацією (наприклад, для промислового стандарту 15,5 % вологості), врахований при збиранні врожаю рівень вологості може бути використаний для розрахунку ваги товарного зерна з одиниці площі. В той час, коли збирають урожай, різноманітні фактори впливають на надійність датчика потоку маси. Зміни у кількості зібраних плодів сільськогосподарської культури, тип зерна, різноманітність та генетика насіння, вологість зерна та температура навколишнього середовища, як відомо, змінюють характеристики зерна та таким чином змінюють сигнал, що сформований датчиком для тієї ж самої величини потоку маси. У зв'язку з такою зміною під час роботи, як добре відомо, датчики потоку маси можуть бути неточними без відповідного калібрування. З цієї причини, посібники, що поставляються з промислово наявними моніторингами кількості зібраних плодів, в основному інструктують оператора час від часу здійснювати калібрувальний догляд за обладнанням. Більш звичайно, коли навантажене зерно вивантажують на зважувальний вагон або ваги, оператор вводить виміряну вагу зерна, а система моніторингу кількості зібраних плодів застосовує поправочний фактор до цього сигналу, шляхом порівняння виміряної ваги з розрахунковою накопиченою масою. Один з декількох недоліків такого способу калібрування послідовного навантаження в тому, що він затребує багато часу і часто просто не виконується на регулярній основі оператором. Враховуючи, що багато виробників не виконують регулярного калібрування і в спробі автоматизувати процес калібрування, деякі повозки для зерна адаптовані для бездротової 1 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 передачі навантажувальної ваги до системи відображення кількості зібраних плодів, як розкрито в патенті США № 7,073,314 Бека та інших. Проте, коли використано декілька повозок для зерна, такий метод потребує оснащення інструментом додаткових машин з метою одержати калібрування навантаження, та калібрування ймовірно не може бути, коли оператор розвантажує зерно безпосередньо у вантажівку для перевезення зерна. Додатково, калібрування послідовного навантаження не може бути можливим, коли, наприклад, вантажівка для перевезення зерна може бути вивантаженою частково. Крім того, цей спосіб не включає властиві вади калібрування послідовного навантаження, які описані нижче. Навіть якщо оператор або система відображення кількості зібраних плодів регулярно виконують калібрувальний догляд за обладнанням, багато умов, які впливають на датчик потоку маси змінюються багато разів під час нагромадження кожним навантаженням таким чином, що калібрувальний догляд за обладнанням не зданий для корекції в таких випадках. Іншими словами, різні зміни в умовах, які вимагають корекції датчика потоку маси, будуть рідко збігатися з графіком калібрування послідовного навантаження. Наприклад, навантаження зерна з високою вологістю може бути зібрано і використано повторне калібрування датчика потоку маси тільки перед введенням осушувача площі на поле, в результаті чого датчики потоку маси більше неточні, ніж коли калібрування не було проведено. Як така, є потреба у системі та способі точного калібрування сенсору величини потоку маси відображення кількості зібраних плодів під час збирання урожаю. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Фіг. 1A являє собою вид в перспективі звичайного комбайну для збирання урожаю. Фіг. 1В показує звичайний датчик потоку маси. Фіг. 1С показує інший варіант втілення датчика потоку маси. Фіг. 1D показує ще один варіант втілення датчика потоку маси. Фіг. 2А показує варіант втілення процесу калібрування датчика потоку маси. Фіг. 2В показує інший варіант втілення процесу калібрування датчика потоку маси. Фіг. 2С показує характеристики калібрування для датчика потоку маси. Фіг. 2D показує дані ваги транспортного засобу та датчику потоку маси. Фіг. 3 показує варіант втілення системи для калібрування датчика потоку маси. Фіг. 4А являє собою горизонтальну проекцію системи зважування транспортного засобу. Фіг. 4В являє собою схематичну вертикальну проекцію передньої осі машини для збирання урожаю, що зображує навантаження на передню вісь та систему зважування транспортного засобу з Фіг. 4А. Фіг. 4С являє собою горизонтальну проекцію іншого варіанта втілення системи зважування транспортного засобу. Фіг. 4D являє собою діаграму потоку, що показує процес визначення фантомних навантажень. Фіг. 5А являє собою вид в поперечному розрізі варіанта втілення тензометра. Фіг. 5В являє собою вид в поперечному розрізі тримача сенсора, як спостерігається вздовж осі В-В на Фіг. 5А. Фіг. 5С являє собою вид у перспективі магнітного тримача з Фіг. 5А. Фіг. 6 являє собою діаграму процесу потоку, що зображує спосіб калібрування системи зважування транспортного засобу. Фіг. 7А показує один варіант втілення системи для вимірювання ваги зерна або зміни у вазі зернового баку, в той час коли він наповнюється зерном. Фіг. 7В-7Е показують різні види іншого варіанта втілення для вимірювання ваги зерна або зміни ваги зернового баку, в той час коли він наповнюється зерном. Фіг. 8 являє собою вертикальну бічну проекцію варіанта втілення головки датчика тиску. Фіг. 9 показує спосіб для виявлення ненадійних даних ваги транспорту. ДЕТАЛЬНИЙ ОПИС Способи калібрування Посилаючись на креслення, на яких відповідна нумерація позначає ті самі або відповідні частини на декількох видах, Фіг. 2А являє собою блок-схему, що показує етапи переважного процесу 200 для калібрування датчика потоку маси 130 (Фіг. 1В). При ініціювання етапу запуску 210, починають два кроки вимірювання 215 та 220. На етапі 215 сигнал величини потоку маси одержана датчика потоку маси. На етапі 220 сигнал ваги транспортного засобу, пов'язаний з вагою комбайну для збирання урожаю, отримують з системи вимірювання ваги транспортного засобу. На етапі 235 поправочний фактор потоку маси переважно одержують з попереднього рівня запуску і множать на виміряну масу зібраного урожаю зерна з метою одержати скоректовану величину потоку маси. На етапі 237 скоректований вимір потоку маси переважно 2 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 повідомляється, відмічається за часом та зберігається для подальшої обробки. На етапі 250 визначається помилка між сигналом потоку маси та сигналом ваги транспортного засобу та розраховується новий поправочний фактор потоку маси. Новий поправочний фактор потоку маси переважно зберігається для використання на етапі 235; тобто, новий поправочний фактор потоку маси застосовується для подальшого вимірювання величин потоку маси. Визначення помилки та розрахунку нового поправочний фактору на етапі 250 маже бути виконаним різними способами. Перший спосіб являє собою просте ділення інтегралу сигналу потоку маси на зміну в повної ваги транспорту. Тим не менше, перша проблема методу 1bis в тому, що вага транспортного засобу не змінюється безпосередньо з сигналом потоку маси, тобто, зерно, що ударяється об ударну плиту 140 (Фіг. 1В) датчика потоку маси 130, вже вплинуло на загальну вагу транспорту в момент збору урожаю. Цю проблему можна частково скорегувати виміром часу, протягом якого сигнал сенсору потоку маси продовжує зчитувати ненульове значення після зупинки збирання урожаю комбайном, а потім затримують у часі сигнал потоку маси для кращого вирівнювання сигналу ваги транспортного засобу. Інша проблема, пов'язана з таким способом, виявляється в тому, що виміри ваги транспортного засобу в будь-який момент часу, або навіть зміна у вимірі ваги транспортного засобу між будьякими окремими моментами часу, не може бути надійним через зміну нахилу транспортного засобу або інші зміни умов (як описано нижче відносно до інших варіантів втілення системи зважування транспорту). Крім того, емпіричні дані показали, що датчики потоку маси відносно точні під час роботи, окрім випадків, коли комбайн натрапляє на випадкові нерівності поля або станів сільськогосподарської культури. Коли поля або стани сільськогосподарської культури змінюються, похила виміряних сукупних даних буде значно відрізнятись від похилої виміряних даних ваги транспорту, в якому набори даних будуть відрізнятись один від одного. Випадкова корекція похилої даних сенсору потоку даних буде "підігнаною" близьким набором даних, але набори даних повинні бути простеженими на майже постійній основі для того, щоб застосувати корекцію в потрібний час. У світлі проблем і емпіричних результатів, описаних вище, інший процес для корекції ваги на етапі 250 показаний на блок-схемі на Фіг. 2В. В процесі на Фіг. 2В необхідність поправочного фактору визначається на основі відносної похилої даних ваги транспортного засобу та сукупних даних потоку маси. На етапі 252 величину потоку маси переважно отримують з довідкової таблиці (описано більш докладно з посиланням на Фіг. 2C) у світлі форми сигналу датчика потоку маси 130. На етапі 254 величина потоку маси, а також накопичена сума величин потоку маси записується та переважно відмічається за часом. На етапі 256 вага транспортного засобу записується та переважно відмічається за часом. На етапі 258, процеси етапів 252, 254 та 256 повторюються, переважно поки не буде досягнуто вимірювальний період Т (наприклад, 10 секунд). На етапах 260 та 262, похила (тобто швидкість зміни) потоку маси з плином часу порівнюється з похилою (тобто швидкістю зміни) ваги транспортного засобу з плином часу. Якщо сигнали, що вказують напрямок похилої, різні, або абсолютне значення похилої відрізняється більш, ніж на пороговий відсоток (наприклад, 1 відсоток), то новий поправочний фактор обчислюють на етапі 264. В іншому випадку, попередній поправочний фактор (якщо такий є) переважно збережений на етапі 266. Слід мати на увазі, що збереження поправочного фактору не може містити позитивного алгоритмічного етапу. Слід розуміти, що на додаток до порівняння швидкості змін, потік, що базується на оцінці зміни ваги, можна порівняти за записуваний період Т на основі оцінки зміни ваги (переважно отримують з різниці у сигналі ваги на початку і наприкінці періоду записи) так, що відповідний поправочний фактор може бути визначений. Довідкова таблиця, що береться до уваги переважно на етапі 252, переважно містить набір калібрувальних кривих 280, як показано на Фіг. 2С. Реакція деяких промислових доступних датчиків потоку маси ударного типу є нелінійною до величини потоку маси, як добре відомо в даному рівні техніки. Форма цієї нелінійної залежності може змінюватись за таких факторів, як тип зерна, нахил транспортного засобу і вміст вологи. Таким чином, набір калібрувальних похилих 280, що відповідають кожному діапазону таких факторів, може бути емпірично розроблений та береться до уваги для визначення величини потоку маси датчиком на етапі 252. Вирахування нового поправочного фактору на етапі 264 проводиться для того, щоб найкращим чином відповідати кумулятивній величині потоку маси даним ваги транспортного засобу за вимірювальний період Т або множини вимірювальних періодів Т. Поправочний фактор може включати один лінійний множник. Фіг. 2D являє собою проілюстрований набір даних 270. Набір даних 270 включає дані ваги транспортного засобу 272 (представлена графіком розсіювання) та кумулятивні дані норми потоку маси 271 (представлена лінійним графіком). За 3 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 вимірювальний період Т (на Фіг. 2D, 60 секунд), похила кумулятивних даних величини потоку маси 271 суттєво відрізняється від похилої даних ваги транспортного засобу 272. Таким чином, переважно використовують коригувальну похилу (зображена графіком 27`). Щоб досягти цього, поправочний фактор (k) обчислюється як співвідношення похилої 27` та похилої графіку, що найкращим чином відповідає даним величини потоку маси 271. Слід мати на увазі, що може бути використаний більш складний спосіб коригування, щоб підбирати набір даних, замість того, щоб застосовувати множення на константу. Наприклад, альтернативний спосіб може визначати необхідні коефіцієнти, щоб вводити дані датчику потоку маси до одно-розрядного, двох-розрядного, трьох-розрядного або чотирьох-розрядного багаточлена, який найкращим чином відповідає даним ваги транспортного засобу за вимірювальний період Т. Слід також розуміти, що в деяких заявках способи обробки сигналу, що відомі з рівня техніки (таки як фільтри придушення шумів або фільтри нижніх частот), можуть бути застосованими як до одного, так і до обох сигналів величини потоку маси, щоб запобігати записування помилок як даних. Системи калібрування Фіг. 3 являє собою схематичну ілюстрацію системи калібрування 300, що переважно використовується для проведення процесу 200. Система калібрування 300 переважно включає в себе систему зважування транспортного засобу 400, контрольна панель кількості зібраних плодів 310, систему відображення 320, датчик вологості 330, датчик ваги шнека 335, датчик швидкості 340, один або більше гіроскопів 345, один або кілька акселерометрів 350 (бажано тривісний акселерометр), GPS-система 355, датчик потоку маси 130, головка датчика тиску 380 і датчик потоку маси 130. Система відображення 320 переважно включає в себе дисплей 324 і схему обробки, яка включає в себе блок центрального процесору (CPU) 322. Дисплей 324 переважно являє собою графічний користувальницький інтерфейс, виконаний з можливістю дозволяти оператору вводити команди. Система відображення 320 переважно встановлена в кабіні 12 (Фіг. 1A) комбайна 10, так що користувач може переглядати дисплей 324. У деяких варіантах втілення система відображення 320 може також бути налаштованою для відображення посадкової інформації, такої як описаної в спільно поданій заявником заявці на патент США № 13/292,384, що включено в даний опис у всій своїй повноті за допомогою посилання. У таких варіантах втілення система відображення 320 переважно налаштована для відображення карт з накладенням посадкової інформації з даними кількості зібраних плодів і порівняння посадкової інформацію даних кількості зібраних плодів. Панель монітору кількості зібраних плодів 310 переважно встановлена на комбайні 10. Гіроскоп 345 та акселерометр 350 переважно знаходяться в електричному зв'язку з панеллю монітору кількості зібраних плодів 310 і встановлені на ній. Датчик швидкості 340, датчик вологості 330, датчик потоку маси 130, головка датчика тиску 380 і система зважування транспортного засобу 400 всі разом перебувають переважно в електричного зв'язку з панеллю монітору кількості зібраних плодів 310, яка, у свою чергу, знаходиться в електричному зв'язку з системою відображення 320. Система GPS 355 також переважно має електричний зв'язок з системою відображення 320. Датчик швидкості 340 переважно виконаний з можливістю вимірювання швидкості осі комбайна, що є відомим в даній галузі техніки. Після кожного повороту або часткового обертання осі, датчик швидкості 340 переважно посилає кодовані імпульси на панель монітору кількості зібраних плодів 310. Система відображення 320 переважно визначає швидкість осі з часу між кодованими імпульсами. Система вимірювання ваги транспорту Фіг. 4A зображує один варіант втілення системи зважування транспортного засобу 400. Система зважування 400 зазвичай включає в себе комплект тензометрів 500 (детально описано нижче), який прикріплений до комбайну 10. Як показано, комбайн 10 включає в собі передні шини 410, передню вісь 422, задні колеса 415 і задню вісь 427. В одному варіанті втілення системи зважування транспортного засобу 400 включає в себе пару передніх тензометрів 500f1 та 500f2, встановлених на передній осі 422, і пару задніх тензометрів 500r1 та 500r2, встановлених на задній осі 427. Кожен тензометр 500 має крайній правий кінець і крайній лівий кінець і переважно встановлений на відповідній осі в двох місцях поблизу зазначеного крайнього правого кінця і поблизу зазначеного крайнього лівого кінця. Кожен тензометр 500 переважно встановлюють за допомогою кронштейнів 460 (Фіг. 4В) або іншого відповідного пристрою надійно кріпиться до відповідної осі. Кожен тензометр 500 знаходиться переважно в електричному зв'язку з відповідною віссю, на якій він встановлений. Кожний тензометр 500, 4 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 переважно знаходиться в електричного зв'язку з панеллю монітору кількості зібраних плодів 310. У роботі системи зважування транспортного засобу 400, вага комбайна 10 переноситься осями 422 та 427, які передають навантаження на передні і задні колеса 410 та 415 відповідно. Таким чином, напруга вигину прикладається до передньої осі 422 і задньої осі 427. Фіг. 4В являє собою схематичну ілюстрацію навантажень, що діють на передню вісь 422. Частина ваги комбайна 10, що переноситься на передню вісь 422, ідентифікується як Fw. Вага Fw застосовується у двох точках, де рама комбайна прикріплена до осі, внаслідок чого прикладається сила Fw/2 в кожній точці прикладення. Навантаження Fw передається в ґрунт передніми шинами 410, в результаті чого зворотна сила визначається силами Fr і F1 на кожній передній шині 410. Хоча не показано, відповідні навантаження і зворотні сили, що одержані в результаті напруги вигину, сприймаються на задній осі 427. Слід мати на увазі, що так як навантаження на осях 422 та 427 збільшується за рахунок збільшення кількості зерна, яке додається в зерновий бак, коли збирають врожай сільськогосподарської культури, то напруга вигину на осях буде збільшуватися. Такі підвищення напруги вигину призведуть до переміщення всередину кронштейнів 460 один до одного, коли осі вигинаються, як перебільшено показано штрихованою лінією на Фіг. 4В. Коли кронштейни зміщуються всередину, тензометри 500 генерують відповідне збільшення напруги, яка доводиться до панелі монітору кількості зібраних плодів 310. Сума напруг від тензометрів 500 пропорційна вазі комбайна 10 і величині сили Fw, прикладених до кожної осі. У деяких варіантах втілення передні тензометрами 500f1 і 500f2 може бути опущеними, так що тільки задня вісь 427 є обладнаною тензометрами 500r1 і 500r2. Слід мати на увазі, що в таких випадках точність системи зважування транспортного засобу буде ставитись під загрозу, тим не менше, після тривалого періоду роботи такого варіанту буде як і раніше забезпечувати корисний показник того, наскільки далеко датчик потоку маси 130 "переносився" відповідно до методів, описаних з посиланням на Фіг. 2A і 2B. Пристрій вимірювання ваги транспортного засобу Фіг. 5 показує поперечний переріз одного з варіантів втілення тензометра 500. Тензометр 500 переважно включає в себе трубопровід 510, датчик 530, тримач датчика 535, магніт 520 і магнітний тримач 525. Трубопровід 510 встановлений на першому кінці до першого кронштейну 460. Тримач датчика 535 фіксується (наприклад, пресовою посадкою) в трубопроводі 510. Трубка 515 переважно встановлена в тримачі датчика 535. Як найкраще видно на Фіг. 5B, датчик 530 розташований усередині трубки 515, переважно заливкою. Магнітний тримач 525, що встановлений з можливістю ковзання, розташований всередині трубопроводу 510. Магнітний тримач 525 прикріплений до стержня 550. Стержень 550 прикріплений до другого кронштейну 460 поблизу другого кінця трубопроводу 510. Магніт 520 переважно встановлюють всередині магнітного тримача 525, як найкраще видно на Фіг. 5C. Магніт 520 переважно включає в себе отвір 522. Магнітний тримач 525 включає в себе порожнину 527. Трубка 515 переважно проходить через магніт отвір 522 і в порожнину магнітного тримача 527. Трубка, що переважно радіально обмежена кільцем ущільнювача 532, розміщується всередині магнітного тримача 525. Датчиком 530 може бути будь-який датчик, що виконаний з можливістю випромінювати сигнал, пропорційний магнітному полю, що сприймається датчиком. Датчик 530 є переважно датчиком Холла, такий як модель номер A1392 доступний від Allegro Microsystems, Inc з Сайтама, Японія. Датчик 530 має електричний зв'язок з панеллю монітору кількості зібраних плодів 310. При роботі, коли кронштейни 460 рухаються відносно один одного, як описано вище і показано на Фіг. 4В, магнітний тримач 525 переміщується усередині трубопроводу 510 таким чином, що магнітний тримач 525 і тримач датчика 535 рухаються один відносно одного. Таким чином, датчик 530 рухається в отвір 522 в магніті 520. Магніт 520 випромінює магнітне поле в межах отвору 522. Величина магнітного поля змінюється по ширині магніту 520 (справа-наліво, як показано на Фіг. 5А). Так як датчик 530 рухається в магнітному полі, то датчик 530 посилає сигнал на панель монітору кількості зібраних плодів 310, відносно того, напруга якого сигналу пропорційна величині магнітного поля в місці розташування датчика 530. Таким чином, напруга, створювана за допомогою датчика 530, пов'язана з положенням датчика 530 всередині магніту 520. Крім того, напруга, створювана за допомогою датчика 530, пов'язана з відносним зсувом кронштейнів 460. Слід розуміти, що інші варіанти втілення тензометра 500 можуть включати в себе магніт 520, що має різну форму і різні розташування датчика 530 по відношенню до магніту 520. Однак 5 UA 114785 C2 5 10 15 20 25 30 35 40 45 варіант втілення, описаний з посиланням на Фіг. 5-5C є переважним, оскільки в отворі 522 величина магнітного поля поруч з магнітом 520 значно варіюється і має істотно лінійний характер в межах отвору уздовж ширини магніту 520. Переважно використовувати два тензометри 500, встановлені на кожній осі внаслідок комплексних навантажень, які сприймаються осями під час роботи. Наприклад, якщо одна з осей була поміщена попереду або позаду вигину в напрямку переміщення комбайна 10 (тобто поперек вертикальні сили Fw, показаної на Фіг. 4В), кронштейни 460 будуть сприймати відносне зміщення, пов'язане з зміною ваги комбінату 10. Тим не менш, з двома тензометрами 500, такий вигин переміщує одну пару кронштейнів 460 далі один від одного при переміщенні іншої пари кронштейнів 460 ближче один до одного таким чином, що сума напруг, надісланих тензометром 500 залишається по суті позбавленою впливу. Аналогічне зниження помилок спостерігається, якщо будь-яка вісь знаходиться в обертанні Слід також мати на увазі, що тензометри 500 можуть бути встановленими на нижній частині осей 422, 427 таким чином, щоб кронштейни 460 рухалися далі один від одного, коли збільшується вага комбайна 10. Обробка даних потоку маси Система калібрування 300 також переважно обробляє скориговані дані потоку маси в дані кількості зібраних плодів. Хоча спосіб калібрування, описаний з посиланням на Фіг. 2А та 3, здійснюють при збиранні врожаю, виправлення даних потоку маси зберігаються в системі відображення 320. Система відображення 320 переважно під час роботи інтегрує дані потоку маси за кожен дискретний період моніторингу (Т) (наприклад, п'ять секунд), щоб отримати масу (m) накопиченого зерна протягом цього періоду моніторингу Т. Користувач вводить переважно ширину хедера (тобто, хедерну ширину (W h)) в систему відображення 320 до роботи. Система відображення 320 визначає відстань (D) шляхом інтегрування швидкості (виміряної, наприклад, датчиком швидкості 340) протягом періоду моніторингу Т. Кількість зібраних плодів (Y) може бути розрахована за наступною формулою: m Y DW h . Кількість зібраних плодів може бути скорегованою з врахуванням вологості з використанням сигналу від датчика вологості 330 і повідомляється в сухих бушелях на акр, як відомо в даній галузі техніки. Розташування на місцях, пов'язаних з кожним T період моніторингу визначаються з використанням системи GPS 355 та записуються системою відображення 320. Дані GPS і дані кількості зібраних плодів можуть бути використані для отримання вихідної карти, що ілюструє просторову зміну кількості зібраних плодів. Способи калібрування системи зважування транспортного засобу Відповідно до деяких способів калібрування системи зважування транспортного засобу 400, відповідні множники переважно визначають для застосування до сигналу, переданого кожним тензометром 500 таким чином, що сума сигналів, помножена на їх окремі множники, є, по суті, пропорційною масі комбайну 10. Фіг. 6 являє собою блок-схему, що показує процес 600 для калібрування системи зважування транспортного засобу. На етапі 610, система відображення 320 записує сигнали Vi через Vn, що надіслані кожним тензометром 500. На етапі 620 система відображення 620 спрямовує оператора виконати процедуру калібрування таким чином, щоб різні шини несли різні частини ваги комбайна 10. Наприклад, система відображення може інструктувати оператора, для керування комбайном на по суті плоскій поверхні із заданою швидкістю. Оскільки загальна вага комбайна 10 істотно не змінюється протягом маневру калібрування, відношення між сигналами Vn можуть бути змодельовані відношенням, таким як: W N Cn Vn (t ) n 1 50 55 , де: W - постійна, тому що вага комбайна постійна (примітка: W не може представляти фактичну вагу комбайна 10), Vn - представляє сигнал, надісланий n-ним тензометром 500, Cn - коефіцієнт, що представляє поправочний фактор або калібрувальний множник, пов'язаний з n-ним тензометром 500, t - час у секундах. Таким чином, на етапі 630 система відображення 320 переважно визначає набір коефіцієнтів Cn, які призводять до постійного значення W протягом процедури калібрування. Слід розуміти, що на практиці в деяких випадках постійне значення W не може бути отриманим, і в цьому випадку система відображення переважно визначає набір коефіцієнтів Cn, який є результатом найменшої зміни (наприклад, стандартне відхилення) W протягом процедури 6 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 калібрування. На етапі 640 відома вага додається або видаляється з системи. Наприклад, хедер 15 може бути видалений з комбайна 10 таким чином, щоб загальна вага комбайна зменшувалась на відому маси хедера. На етапі 650 нові коефіцієнти C n розраховуються так, що зміна W дорівнювала відомій зміні ваги комбайна. Наприклад, коефіцієнти C n можуть бути помножені на одну константу, що дорівнює зниженню W, поділеного на відому зміну ваги (наприклад, вагу хедера 15). На етапі 660 система відображення 320 переважно зберігає нові коефіцієнти Cn для застосування в наступних вимірюваннях ваги. На необов'язковому етапі установки, що передує калібруванню, описаного в блок-схемі процесу потоку 600, система відображення 320 переважно інструктує оператора здійснювати звичайний порядок, подібний до порядку калібрування 620 таким чином, щоб частина ваги переносилась поперемінно різними шинами. Оскільки кожен етап встановленого порядку виконується, система відображення 320 оцінює зміну сигналів V n і визначає, чи зміна сигналів відповідає передбачуваній зміні частини ваги, що переноситься кожною шиною. Наприклад, якщо система відображення інструктує оператора для прискорення транспортного засобу, повинно бути дотриманим збільшення сигналів від спрямованих назад передніх і задніх тензометрів 500f2 та 500r2. Якщо таких змін не спостерігалося, система відображення 320 переважно інструктує оператора для забезпечення того, щоб спрямовані назад тензометри 500f2 і 500r2 були встановлені правильно. На додатковому етапі оцінки системи, система відображення 320 визначає нові коефіцієнти Cn (як виконано на етапі 630 в процесі потоку 600), в той час як комбайн 10 рухається, але не збирає врожаю. Як приклад, система відображення 320 може ініціювати крок 630 процесу 600, коли система GPS 355 вказує, що комбайн 10 рухається швидше, ніж 10 миль на годину або будь-якої заданої швидкістю, вище якої комбайн 10, ймовірніше за все, перебуває в транспортувальному режимі і не збирає врожаю. Слід зазначити, що обчислення нових C n коефіцієнтів протягом транспортування є кращим, оскільки вага комбайна 10 переміщується між несучими елементи, але комбайна не накопичує зерна. Ненадійна передача даних У роботі системи зважування ваги транспортного засобу 400, певні параметри оточуючого середовища та робочі параметри іноді викликають похибку даних ваги транспортного засобу. Такі дані переважно, визначені системою відображення і, переважно, не використовується для калібрування сигналу величини потоку маси, що надходить від датчика потоку маси 130. Таким чином, переважний спосіб 900 для фільтрації ненадійної передачі даних ваги транспортного засобу зображений на блок-схемі на Фіг. 9. На етапі200 система відображення 320 переважно калібрує сигнал величини потоку маси з використанням ваги транспортного засобу у відповідності зі способом 200, описаним з посиланням на Фіг. 2А. На етапі 910 система відображення 320 переважно контролює критерій якості даних. Критерій якості даних переважно включає сигнал, що відповідає точності даних, отриманих в системі зважування транспортного засобу 400. На етапі 920, система відображення 302 переважно порівнює якість даних із заданим порогом. Поріг може включати заданий відсоток або число стандартних відхилень від середнього критерію якості даних або просто задане значення. Поріг переважно лежить між небажаним діапазоном даних якості і бажаним діапазоном даних якості. Якщо критерій якості даних перевищує поріг, то на етапі 930 система відображення переважно калібрує сигнал величини потоку маси з даними ваги транспортного засобу. При проведенні операції 930, система відображення 320 переважно продовжує запис даних з системи зважування транспортного засобу 400, але зупиняє використання системи зважування транспортного засобу. У варіантах втілення, в яких система відображення 320 калібрує датчик потоку маси застосуванням поправочного фактору (наприклад, як описано з посиланням на Фіг. 2В), система відображення може продовжувати використовувати останній поправочний фактор, розрахований перед критерієм якості даних, що перевищив поріг довірених даних. На етапі 940 система відображення переважно визначає критерій якості даних, який є нижче порогу довірених даних (тобто чи є дані ваги транспортного засобу такими, що їм можна знову довіряти). Якщо так, то на етапі 950, система відображення 320 переважно відновлює калібрування величини потоку маси з даними ваги транспортного засобу. Ненадійна передача даних - розвантажувальні роботи Під час роботи системи калібрування 300, оператор буде іноді активувати розвантажувальний шнек 30 комбайна 10 для того, щоб видалити накопичене зерно 110 з зернового бака 20 комбайну. Часто ця операція виконується при збирання урожаю, з трактором, що тягне зерновий візок або шнек вагона поруч з комбайном 10. Під час такої роботи, вага комбайна змінюється через розвантажування і, отже, вага транспортного засобу не повинна 7 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 використовуватися для калібрування датчика потоку маси 130, як описано тут. Таким чином, датчик ваги шнека 335 переважно включений у варіанті втілення системи калібрування 300, як показано на Фіг. 3. Датчик ваги 335 може містити тензодатчик, приєднаний до будь-якого несучого елементу комбайна 10, що переносить вагу розвантажувального шнека 30 і виконаний з можливістю вимірювання деформації (наприклад, розтягування) несучого елемента, або будь-який інший датчик, налаштований на надсилання сигналу, пропорційного вазі розвантажувального шнека 30. На фазі встановлення, система відображення 320 записує значення сигналу від датчика ваги шнека 335, коли немає зерна в розвантажувальному шнеці 30. В процесі роботи, коли комбайн розвантажує зерно через розвантажувальний шнек 30, вага розвантажувального шнека збільшується, і сигнал від датчика ваги шнека 335 збільшується. Коли сигнал від датчика ваги шнека 335 досягає порогового рівня, що перевищує значення, записане під час етапу установки, система відображення 320 вводить режим передачі ненадійних даних, як описано з посиланням на Фіг. 9. Слід мати на увазі, що, коли розвантажувальний шнек 30 обертається, частотний спектр сигналу датчика ваги шнека зміниться, тому що розвантажувальний шнек буде піддаватися істотній вертикальній вібрації. Таким чином, в альтернативному способі частотний спектр сигналу датчика ваги шнека використовується для визначення, коли шнек обертається. Коли сигнал датчика ваги шнека включає частотний спектр в межах заданого діапазону, що має амплітуду в межах заданого діапазону, система відображення 320 переважно встановлює режим ненадійної передачі даних. Крім того, сигнал від датчика ваги шнека 335 може використовуватися для визначення того, чи був зерновий бак 20 повністю спустошеним. Якщо оператор розвантажує тільки частину зернового баку 20 і зупиняє розвантажувальний шнек 30, то частота сигналу датчика ваги шнека повернеться до рівня нижче порогового значення (що означає, що розвантажувальний шнек не обертається), але значення сигналу буде залишатися вище порогового значення, тому що розвантажувальний шнек не може бути порожнім, поки зерновий бак 20 не є спустошеним. Таким чином, коли сигналу датчика ваги шнека повертається до рівня нижче порогового значення, система відображення 320 переважно визначає, що зерновий бак 20 порожній і може виконувати будь-який етап, який вимагає порожнього зернового баку, такий як порівняння суми сигналів тензометра з сумою, виміряною протягом установки або візуальної індикації оператору, що зерновий бак порожній. Ненадійна передача даних - рушійні сили транспортного засобу Акселерометр 350, переважно, спрямований і виконаний з можливістю посилання сигналу на панель монітору кількості зібраних плодів 310, пов'язані з прискоренням або уповільненням комбайну 10 вздовж напрямку руху. Оскільки надмірне прискорення або уповільнення може накладати надлишкове навантаження на пристрій зважування транспортного засобу, система відображення 320 переважно встановлюється в режим передачі ненадійних даних, коли сигнал акселерометра перевищує задане граничне значення. Точно так само, гіроскоп 345 переважно спрямований і виконаний з можливістю посилання сигналів на панель монітору кількості зібраних плодів 310, причому сигнали пов'язані з нахилом і креном комбайну 10. В наслідок надмірного нахилу або котіння комбайна 10, що спричиняють пристрій вимірювання ваги транспортного засобу зазнавати навантаження, які не можуть бути безпосередньо пов'язані з масою комбайна, система відображення 320 переважно встановлюється в режим ненадійної передачі даних, коли один з сигналів гіроскопу перевищує зумовлене порогове значення. Ненадійні дані - Контакт верхня частина-земля Слід розуміти, що, коли хедер 15 контактує з землею, здатність системи зважування ваги транспортного засобу 400 для зважування комбайна 10 узгоджується, оскільки частина ваги транспортного засобу переноситься верхньою частиною. Таким чином, датчик тиску хедера 380 може використовуватись в прикладних рішеннях, в яких хедер 15 час від часу або регулярно контактує з землею. Датчик тиску хедера 380 може включати будь-який датчик тиску, виконаний з можливістю виробляти сигнал, який відповідає тиску в одному або декількох гідравлічних приводів, що використовуються для розміщення хедера 15. Фіг. 8 ілюструє датчик тиску хедера 380 з гідравлічним зв'язком з робочою камерою 810 гідравлічного виконавчого механізму 800. У показаному варіанті втілення, датчик тиску хедера 380 встановлено таким чином, що рідина з лінії подачі тиску 820 проходить через датчик тиску хедера 380 перед входом в робочу камеру 810. Датчик тиску хедера 380 може включати датчик тиску, такий як виробляється Gems Sensors & Controls, в Планвілі, штат Коннектикут. Датчик тиску хедера 380 посилає сигнал на панель монітору кількості зібраних плодів 310, що відповідає тиску в робочій камері 810. У процесі роботи системи відображення 320 переважно порівнюється сигнал від датчика тиску хедера 380 з пороговою величиною, що відповідає тиску, необхідного, щоб утримати 8 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 хедер 15 безпосередньо над поверхнею. Коли тиск падає нижче порогового тиску, різниця тиску відповідає вазі в хедері, що переноситься по землі. Під час роботи системою відображення 320 переважно вираховується ця вага від ваги транспортного засобу, виміряної системою зважування транспортного засобу 400. У деяких випадках, особливо коли не очікується, що хедер 15 контактуватиме часто з землею під час роботи, сигнал від датчика тиску хедера 380 можна бути використаним просто для визначення, чи система відображення 310 повинна встановлювати режим ненадійної передачі даних. Ненадійна передача даних - фантомне навантаження У деяких варіантах втілення система відображення 320 також переважно встановлює режим ненадійної передачі даних, коли ефективна точка навантаження на шини 410 зміщується. Фіг. 4C ілюструє комбайн 10, що має спарені передні шини 410, як це використовується в промислово доступних комбайнах. У процесі роботи, якщо вага комбайна 10 переноситься внутрішньою спареною шиною та зовнішньою спареною шиною (як, наприклад, коли зовнішня спарена шина стикається з крутим нахилом або перешкодами) ефективна точка навантаження переноситься від центра передньої осі 422. Таким чином, вигин передньої осі 422 збільшується, так що сигнал від тензометрів 500fl і 500f2 збільшується, навіть якщо вага комбайна не змінилася. Цей помилковий сигнал описаний тут як "фантомний сигнал" і результуюче розраховане навантаження описане тут як "фантомне навантаження". Варіант втілення системи зважування транспортного засобу 400, для виявлення фантомного навантаження, показаного на Фіг. 4C, що переважно включає в себе спарені тензометри 500dl1 і 500dl2 між лівою передньою шиною 410l і тензометри 500f1 і 500f2. Крім того, той же варіант переважно включає в себе спарені тензометри 500dr1 і 500dr2 між правою передньої шиною 410r і тензометри 500f1 та 500f2. Подвійні тензометри 500d переважно встановлені на комбайні 10, з використанням кронштейну або іншого відповідного пристрою. Спарені тензометри 500d мають електричний зв'язок з панеллю монітору кількості зібраних плодів 310. Слід мати на увазі у світлі опису даної заявки на винахід, ще один тензометр 500d може бути встановлений поруч з кожними спареними шинами 410, але два тензометри переважно включено (як показано на Фіг. 4С) для скасування дії торсіонного і невертикального вигину. Коли сума сигналів з будь-якої пари спарених тензометрів 500d перевищує порогове значення, система відображення 320 переважно встановлює режим ненадійної передачі даних. Використанням втілень систем зважування транспортного засобу, описаних тут з посиланням на Фіг. 4C, система відображення 320 може виявити фантомне навантаження, коли співвідношення між сигналами, або з будь-якої пари додаткових спарених тензометрів 500d і передніх тензометрів 500f перевищує порогове значення. В одному способі, система відображення 320 може просто встановити режим ненадійної передачі даних, коли виявляється фантомне навантаження. Однак, згідно з іншим способом, як показано на блок-схемі на Фіг. 4D, система відображення 320 може підрахувати і віднімати виявлені фантомні навантаження від виміряного навантаження. У технологічній схемі 480 на Фіг. 4D на етапі 481, система відображення переважно визначає, що комбайн 10 збирає урожай відповідно до ряду показників, у тому числі: (а) чи була верхня частина опущена за допомогою датчика ваги верхньої частини 380, (б) чи вертикальне прискорення створює завади використанням акселерометра 350, (в) чи комбайн повертається при використанні гіроскопу 345; або (г) чи швидкість комбайна знаходиться в межах заданого діапазону (наприклад від двох до семи миль на годину) з використанням системи GPS 355 або датчика швидкості 340. Якщо комбайн 10 збирає врожай, то на етапі 482 система відображення 320 визначає, чи котіння комбінату знаходиться в межах заданого діапазону, визначеного за допомогою гіроскопа 345. Якщо котіння є прийнятним, комбайн переважно регулює сигнали передньої осі і сигнали спарених тензометрів на етапі 483, щоб розрахувати сигнали "відсутність нахилу" шляхом визначення нахилу за допомогою акселерометра 350, визначення фактору нахилу, яким навантаження на передню вісь впливає через поєднання нахилу, і ділення сигналів фактором нахилу. На етапі 484 система відображення 320 переважно визначає передбачені сигнали "відсутність нахилу" спареного тензометра з використанням датчика потоку маси 360, щоб визначити зміну ваги зерна. На етапі 485, система відображення 320 переважно віднімає передбачений сигнал "відсутність нахилу" спареного тензометра з відповідними розрахунками сигналу "відсутності нахилу" спареного тензометра для отримання "фантомного сигналу". На етапі 486, система відображення 320 переважно використовує множники, що розраховані для спарених тензометрів 500d (як описано з посиланням на Фіг. 6) для кожного "фантомного сигналу" і підсумовує "фантомні сигнали", щоб отримати загальне "фантомне навантаження". На етапі 487, система відображення 320 переважно віднімає "фантомне навантаження" від загального навантаження "відсутності нахилу" на передню вісь 422 для отримання 9 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 виправленого навантаження "відсутності нахилу" на передню вісь. На етапі 488 система відображення 320 переважно поправляє навантаження "відсутності нахилу" на передню вісь 422 шляхом множення на коефіцієнт, розрахований фактором нахилу на етапі 483. Таким чином, система відображення 320 має можливість видалити "фантомне навантаження" з виміряної ваги транспортного засобу. Альтернативи - системи зважування транспортного засобу Слід розуміти, що спосіб калібрування датчика потоку маси 130, описаний тут, а також система для здійснення способу, можуть бути здійсненими з будь-яким пристроєм, виконаним з можливістю вимірювання ваги (або зміни у вазі) комбайну 10 або зернового бака 20, що містить очищене зерно 110. Фіг. 7A ілюструє альтернативний варіант виконання системи зважування транспортного засобу 400, в якому зерновий бак 20 комбайна 10 підтримується тензодатчиками 720. Кожен тензодатчик 720 забезпечений датчиками деформації або іншими пристроями, виконаними з можливістю передачі сигналу, пропорційного стисненню тензодатчика. У показаному варіанті здійснення, зерновий бак 20 містить верхній і нижній гребені 750u і 750l. Тензодатчики монтуються між гребенями 750 та рамою комбайну. Слід розуміти, що інші варіанти здійснення системи зважування транспортного засобу можуть включати в собі тензодатчики 720 і в інших місцях, та спрямованих на підтримку ваги зернового бака 20. Однак, як краще за все видна на Фіг. 1А, в більшості промислово доступних комбайнів як елеватор 120 так і поперечний шнек 35 включають з зерновим баком 20 несучі елементи та елементи прикладання навантаження відповідно, так що важко визначити вагу зерна в зерновому баку без зміни конструкції комбайну 10. Таким чином, модифікований комбайн 10, що включає інший варіант втілення системи зважування транспортного засобу 400 проілюстровано на Фіг. 7B-7E. У цьому варіанті втілення вага зернового бака 20 ізольована від інших елементів комбайна 10 і підтримується тензодатчиками 720. Зерновий елеватор 120 проходить через стінку бака 20, без прикладання значного навантаження на бак, переважно через ущільнювач 123, який може бути виготовленими з будь-якого матеріалу (наприклад, гуми), що підходить для ізолювання зерна в баку, що дозволяє зерновому елеватору 120 та баку 20 переміщуватися один відносно одного. Крім того, поперечний шнек 35 розташований нижче поперечного пазу 38 в баку 20, так що зерно падає з бака в поперечний шнек для транспортування на розвантажувальний шнек 30. У таких варіантах втілення клапан або дверцята, що вибірково закриваються (не показані), по всьому поперечному шнеку 35 в нижній частині бака 20 переважно включають утримання зерна в зерновому баку, коли зерно не вивантажується. В основному, вся вага баку 20 таким чином покладена на опори зернового бака 36. Тензодатчики 720 розташовані між опорами зернового бака 36 і опорними елементами 37 рами комбайну. Слід мати на увазі, що у варіантах втілення, описаних вище з посиланням на Фіг. 7B-7E, опорна конструкція та система вимірювання ваги можуть бути суттєво зміненими, під час отримання вимірів, пов'язаних з вагою зернового бака 20. В деяких варіантах втілення опори 36 можуть бути з'єднані безпосередньо (за допомогою зварювання або зчеплення) до опорних елементів 37, а опори 36 обладнано датчиками розтягування. В інших варіантах здійснення, опори 36 можуть бути з'єднані з опорними елементами 37 за допомогою обладнаних штифтів. У варіантах втілення, описаних вище з посиланням на Фіг. 7A, або варіантів втілення, описаних вище з посиланням на Фіг. 7B-E, кожен тензодатчик 720 знаходиться в електричному з'єднанні з панеллю монітору кількості зібраних плодів 310. Слід мати на увазі, що сума сигналів від тензодатчиків 720, яка надходить в бак, пропорційна масі зернового бака і його вмісту. Калібрування варіанту втілення системи зважування транспортного засобу 400 може бути здійснено шляхом запису першої суми сигналів тензодатчиків S1 коли зерновий бак 20 порожній, додавання відомої ваги W cal до зернового баку, і запису другої суми сигналів тензодатчиків 82 з відомою вагою на місці. Відношення W cal до різниці між S2 і S1 являє собою характеристику калібрування k (що вимірюються, наприклад, у фунтах на мілівольт). Таким чином, як тільки зерно додають в бак під час роботи, вага зерна W g може бути представлена у вигляді записуваної суми сигналів тензодатчиків S наступним чином: W g = k(S-S1). У деяких варіантах втілення, чутливість тензодатчиків може бути нелінійною, то відповідним чином характеристика калібрування k повинна бути заміненою на кривій характеристиці (наприклад, кривій 280 на Фіг. 2C), що стосуються набору відомої ваги, до сигналів тензодатчиків. В інших варіантах втілення може переважно проводитися процедура калібрування і отримання набору множників, що відповідає кожному тензодатчику 720, як описано з посиланням на Фіг. 6. Альтернативи - датчики потоку маси 10 UA 114785 C2 5 10 15 20 25 30 35 40 Слід також мати на увазі, що датчику потоку маси 130 не потрібно включати в собі ударну плиту на кшталт такої, що показана на Фіг. 1B, але може містити будь-який датчик, виконаний з можливістю надсилати сигнал, що відповідає величині потоку маси зерна в комбайн 10. Наприклад, Фіг. 1С зображує зерновий елеватор 120, що приводиться в дію приводним валом 122. Датчик крутного моменту 124 з'єднаний з приводним валом 122. Датчик крутного моменту 124 знаходиться в електричному або бездротового зв'язку з панеллю монітору кількості зібраних плодів 310. Датчик крутного моменту 124 може бути внутрішнім поворотним датчиком крутного моменту, таким як існуючі датчики від FUTEK Advanced Sensor Technology, Inc, місто Ірвін, штат Каліфорнія. Датчик крутного моменту 124 переважно виконаний з можливістю формувати сигнал, що відповідає крутному моменту на приводному валу 122. Крутний момент на приводному валу 122 зростає із збільшенням ваги зерна 110, що переноситься за допомогою зернового елеватора 120. Таким чином, сигнал від датчика крутного моменту 124 може бути використаний для вимірювання ваги зерна 110 в зерновому елеваторі 120 в поточний момент часу. Відповідно до одного способу використання варіанту втілення датчика потоку маси 130, швидкість приводного вала 122 може бути виміряною за допомогою датчика швидкості, подібного до датчика швидкості 340 або іншого відповідного пристрою. Використовуючи швидкість приводного вала 122 і відому довжину зернового елеватора 120, панель монітору кількості зібраних плодів 310 переважно визначає, коли зерновий елеватор зробив повний цикл і записує вагу зерна 110, додану до комбайну в кожному циклі. В іншому варіанті втілення датчика потоку маси 130, зображеного на Фіг. 1D, приводний вал 122 приводиться в дію електричним або гідравлічним двигуном 126. Потужність, споживана двигуном 126 вимірюється відомим в даній галузі чином, і подається на панель монітору кількості зібраних плодів 310. Як і крутний момент на приводному валу 122, потужність, споживана двигуном 126, пов'язана з масою зерна 110 в зерновому елеваторі 120 і може бути використана в системі відображення 320 для вимірювання величини потоку зерна 110 відповідно до способу, описаного вище. В інших варіантах втілення, датчик потоку маси 130 може включати в собі пристрої, що використовуються для вимірювання ваги чистого зерна 110 під час його переміщення через комбайн 10, як розкрито в патенті США № 5779541, повний опис якого в повному обсязі включено в дану заявку за допомогою посилання. Інші типи датчиків потоку маси, які можуть бути відкаліброваними згідно зі способом, описаному в даному описі, включають оптичні датчики потоку маси, які відомі в даній галузі техніки. Вищевикладений опис представлено, щоб дозволити будь-якому фахівцю в даній галузі техніки здійснювати і використовувати системи, способи і пристрої, описані тут, і забезпечувати в контексті заявки на патент і його заявленого обсягу правової охорони. Різні модифікації переважного варіанта втілення пристрою, і загальні принципи та ознаки системи і способи, описані тут, будуть очевидні для фахівців в даній галузі техніки. Таким чином, винахід не повинен бути обмеженим варіантами втілення пристрою, системи та способу, що описані вище і показані на кресленнях, але має відповідати самому широкому обсягу, узгодженого по суті та обсягу даного опису та прикладеної формули винаходу. ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Спосіб моніторингу кількості зібраного врожаю при збиранні врожаю зерна з машиною для збирання урожаю, який включає: шляхом використання датчика величини потоку маси, який розміщений для вимірювання величини потоку маси зерна в машині для збирання врожаю, генерування сигналу величини потоку, пов'язаного з величиною потоку зерна в машину для збирання врожаю; генерування сигналу ваги, пов'язаного з вагою зернового бака машини для збирання врожаю, де елеватор проходить через стінку зазначеного зернового бака; та під час збирання зерна кореляцію зазначеного сигналу величини потоку з зазначеним сигналом ваги для моніторингу кількості зібраного врожаю. 2. Спосіб за п. 1, в якому зазначений етап кореляції зазначеного сигналу величини потоку і зазначеного сигналу ваги включає в себе: визначення величини зміни зазначеного сигналу ваги; і порівняння зазначеної величини зміни зазначеного сигналу ваги до зазначеного сигналу величини потоку. 3. Спосіб за п. 1, в якому зазначений етап кореляції зазначеного сигналу величини потоку і зазначеного сигналу ваги включає в себе: 11 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 інтегрування зазначеного сигналу величини потоку за період, щоб обчислити основану на потоці оцінку зміни ваги; визначення зміни в сигналі ваги за зазначений період запису, щоб обчислити основану на вазі оцінку зміни ваги; і порівняння зазначеної основаної на вазі оцінки зміни ваги з основаною на потоці оцінкою зміни ваги. 4. Спосіб за п. 1, який додатково включає: визначення помилки, пов'язаної із зазначеним сигналом величини потоку; та корекцію зазначеного сигналу величини потоку. 5. Спосіб за п. 1, в якому етап генерування зазначеного сигналу ваги включає в себе: забезпечення системи зважування транспортного засобу, виконаної з можливістю генерувати зазначений сигнал ваги, зазначена система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги. 6. Спосіб за п. 5, в якому етап генерування зазначеного сигналу ваги додатково включає в себе: проведення процедури калібрування в той час, коли зазначена вага машини для збирання врожаю залишається практично незмінною; та визначення першого поправкового фактора, пов'язаного із згаданим першим датчиком ваги, і другого поправкового фактора, асоційованого з вказаним другим датчиком ваги, так що вказаний сигнал ваги залишається по суті постійним протягом зазначеної процедури калібрування. 7. Спосіб за п. 5, в якому етап генерування зазначеного сигналу ваги додатково включає в себе: зміну відомої ваги зазначеної машини для збирання врожаю, так що зазначений сигнал ваги змінюється; і визначення першого поправкового фактора, пов'язаного із зазначеним першим датчиком ваги, та другого поправкового фактора, пов'язаного з зазначеним другим датчиком ваги, таким чином, що різниця в зазначеному сигналі ваги відповідає зазначеній відомій вазі. 8. Спосіб за п. 1, який додатково включає: визначення помилки, пов'язаної із зазначеним сигналом величини потоку, на основі зазначеного сигналу ваги; корекцію зазначеного сигналу величини потоку з використанням зазначеної помилки для генерування скорегованих вимірів потоку маси, та відображення зазначених скорегованих вимірів потоку маси. 9. Спосіб за п. 1, який додатково включає: генерування критерію якості даних, пов'язаного з зазначеним сигналом ваги; порівняння зазначеного критерію якості даних з бажаним діапазоном; визначення помилки, пов'язаної із зазначеним сигналом величини потоку, з використанням значення зазначеного сигналу ваги, записаного у той час, коли зазначений критерій якості даних був у зазначеному бажаному діапазоні; корекцію зазначеного сигналу величини потоку з використанням зазначеної помилки для генерування виправленого виміру величини потоку; та відображення зазначеного скорегованого вимірювання величини потоку. 10. Система моніторингу кількості зібраного врожаю при збиранні врожаю зерна з машиною для збирання врожаю, що містить: датчик потоку маси, виконаний з можливістю генерувати сигнал величини потоку, що відповідає величині потоку зерна в машину для збирання врожаю; систему зважування транспортного засобу, яка включає датчик ваги, де зазначена система зважування транспортного засобу виконана з можливістю генерування сигналу, що відповідає вазі частини машини для збирання врожаю, зазначена система зважування транспортного засобу включає пристрій вимірювання переміщення, який розміщено на осі машини для збирання врожаю; та схему обробки з електричним зв'язком з зазначеним датчиком потоку маси та зазначеної системи зважування транспортного засобу, зазначена схема обробки виконана з можливістю обчислення помилки у зазначеному сигналі величини потоку з використанням зазначеного сигналу ваги. 11. Система за п. 10, в якій зазначена схема обробки додатково виконана з можливістю обчислення скорегованої величини потоку маси на основі зазначеної помилки. 12. Система за п. 10, що додатково включає: 12 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 60 датчик якості даних, виконаний з можливістю генерувати критерій якості даних, пов'язаний з зазначеною системою зважування транспортного засобу, зазначений датчик якості даних знаходиться в електричному зв'язку з зазначеною схемою обробки. 13. Система за п. 12, в якій зазначений датчик містить одне з гіроскопа, акселерометра, датчика швидкості, датчика ваги шнека, системи GPS та датчика тиску в хедері. 14. Система за п. 12, в якій зазначена схема обробки додатково виконана з можливістю порівняння зазначеного критерію якості даних з порогом, і в якій зазначена схема обробки додатково виконана з можливістю не брати до уваги зазначений сигнал ваги, коли зазначений критерій якості даних входить в небажаний діапазон, визначений зазначеним порогом. 15. Система за п. 10, в якій зазначений датчик ваги включає в себе тензодатчик навантаження частини ваги машини для збирання врожаю. 16. Система за п. 10, в якій зазначений датчик ваги включає в себе датчик, виконаний з можливістю вимірювати деформацію несучого елемента машини для збирання врожаю. 17. Спосіб калібрування датчика потоку маси машини для збирання врожаю при збиранні врожаю зерна, який включає: перехоплення потоку зерна датчика потоку маси; вимірювання величини потоку маси зазначеного зерна зазначеним датчиком потоку маси для отримання виміряної величини потоку маси; зберігання зазначеного зерна в зерновому баку на машині для збирання врожаю; отримання вимірювань ваги частини зазначеної машини для збирання врожаю, що включає в себе зазначений зерновий бак в перший момент часу і в другий момент часу, щоб отримати виміряну зміну ваги зерна; порівняння зазначеної виміряної зміни ваги зерна з зазначеною виміряною величиною потоку маси; визначення помилки в зазначених вимірюваннях величини потоку маси, що базується на зазначеній зміні ваги зерна під час збирання врожаю зерна, та корегування подальшого вимірювання величини потоку маси, що базується на основі зазначеної помилки. 18. Спосіб за п. 17, який додатково включає: виконання відповідної процедури калібрування до відомої зміни у вазі; порівняння зазначеної виміряної зміни ваги зерна з відомою зміною ваги зерна, і визначення поправкового фактора для корекції зазначеної виміряної зміни ваги зерна з зазначеної відомої зміни ваги зерна; застосування множника для подальшого вимірювання ваги. 19. Спосіб за п. 17, який додатково включає: отримання сигналів, пов'язаних з надійністю зазначених вимірювань ваги, і фільтрування зазначеного вимірювання ваги на основі зазначеного сигналу. 20. Спосіб за п. 17, в якому зазначений етап порівняння зазначеної виміряної зміни ваги зерна з зазначеною виміряною величиною потоку маси включає в себе: визначення величини зміни ваги зерна, накопиченої суми зазначеної величини потоку маси і величини зміни зазначеної накопиченої суми; і порівняння величини зміни ваги зерна з зазначеною величиною зміни зазначеної накопиченої суми. 21. Спосіб за п. 17, в якому згаданий етап порівняння згаданої виміряної зміни ваги зерна до зазначеної виміряної величини потоку маси включає в себе: інтегрування зазначеної виміряної величини потоку маси протягом періоду запису, щоб отримати оцінку зміни ваги на основі потоку; визначення зміни в сигналі ваги за зазначений період запису для отримання оцінки зміни ваги на основі ваги; і порівняння зазначеної оцінки зміни ваги на основі потоку до зазначеної оцінки зміни ваги на основі ваги. 22. Спосіб за п. 17, в якому етап отримання вимірювань ваги частини зазначеної машини для збирання врожаю включає в себе: отримання зазначених вимірювань ваги з системою зважування транспортного засобу, при цьому система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги. 23. Спосіб за п. 22, в якому етап отримання вимірювань ваги частини зазначеної машини для збирання урожаю додатково включає в себе: проведення процедури калібрування в той час, як маса зазначеної машини для збирання врожаю залишається по суті незміненою; і 13 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного з зазначеним другим датчиком ваги, таким чином, що виміряна калібрована вага зазначеної машини для збирання врожаю залишається по суті постійною протягом зазначеної процедури калібрування. 24. Спосіб за п. 22, в якому етап отримання вимірювання ваги частини зазначеної машини для збирання урожаю додатково включає в себе: змінювання відомої маси зазначеної машини для збирання урожаю таким чином, що змінюється сигнал ваги; і визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного з зазначеним другим датчиком ваги, таким чином, що виміряна зміна ваги зерна відповідає зазначеній відомій вазі. 25. Спосіб за п. 17, який додатково включає в себе: генерування критерію якості даних, асоційованого з зазначеними вимірюваннями ваги; порівняння зазначеного критерію якості даних в бажаному діапазоні; визначення помилки, пов'язаної із значенням виміряної величини потоку маси з використанням одного із зазначених вимірювань ваги, які записані під час того, коли зазначений критерій якості даних був в межах зазначеного необхідного діапазону; корегування виміряної величини потоку маси з використанням зазначеного повідомлення про помилку для генерації скорегованої величини потоку маси; і відображення зазначеної скорегованої величини потоку маси. 26. Спосіб за п. 17, в якому згаданий етап визначення помилки у зазначених вимірюваннях величини маси потоку на основі зазначеної зміни ваги зерна здійснюється шляхом обробки схеми, сконфігурованої для обчислення скорегованої величини маси потоку на основі зазначеної точності. 27. Спосіб за п. 26, який додатково включає: генерування критерію якості даних з датчика, при цьому вказаний датчик знаходиться в електричному зв'язку зі згаданою схемою обробки. 28. Спосіб за п. 27, в якому вказаний датчик містить одне з гіроскопа, акселерометра, датчика швидкості, датчика ваги шнека, системи GPS і датчика тиску в хедері. 29. Спосіб за п. 28, який додатково включає: порівняння зазначеного критерію якості даних з порогом; і без урахування сигналу ваги, коли згаданий критерій якості даних вводить небажаний діапазон зазначеного порогу. 30. Спосіб за п. 17, який додатково включає: вимірювання деформації несучого елемента машини для збирання врожаю. 31. Спосіб за п. 17, який додатково включає: генерування сигналу ваги за допомогою тензодатчика, де зазначений тензодатчик вимірює навантаження частини ваги машини для збирання врожаю. 32. Спосіб за п. 17, в якому елеватор проходить через стінки згаданого зернового бака. 33. Спосіб моніторингу збирання врожаю під час збирання зерна машиною для збирання врожаю, причому зазначений спосіб включає: за допомогою датчика виміряної величини потоку маси, розташованого для вимірювання величини потоку маси зерна в машині для збирання врожаю, генерують сигнал швидкості потоку маси, пов'язаної зі швидкістю потоку зерна в машині для збирання врожаю; генерування сигналу ваги, пов'язаного з масою машини для збирання врожаю; моніторингу критерію якості даних, пов'язаного з вказаним сигналом ваги; калібрування згаданого сигналу швидкості потоку із зазначеним сигналом ваги для того, щоб генерувати калібрований сигнал швидкості потоку; оцінювання врожайності на основі зазначеного каліброваного сигналу швидкості потоку; визначення того, чи згаданий критерій якості даних перевищує згаданий довірений поріг; і, при визначенні того, що вказаний критерій якості даних перевищує зазначений поріг, скасування калібрування зазначеного сигналу величини потоку із зазначеним сигналом ваги. 34. Спосіб за п. 33, в якому згаданий етап калібрування згаданого сигналу величини потоку із зазначеним сигналом ваги включає в себе: визначення швидкості зміни зазначеного сигналу ваги; і порівняння швидкості зміни зазначеного сигналу ваги на вказаний сигнал величини потоку. 14 UA 114785 C2 5 10 15 20 25 30 35 40 45 50 55 35. Спосіб за п. 33, в якому згаданий етап калібрування згаданого сигналу величини потоку із зазначеним сигналом ваги включає в себе: інтегрування сигналу величини потоку протягом періоду запису, щоб отримати оцінку зміни ваги на основі потоків; визначення зміни сигналу ваги за заначений період запису для отримання оцінки зміни ваги на основі ваги; і порівняння зазначеної витрати потоку на основі оцінки зміни ваги для зазначеної ваги на основі оцінки зміни ваги. 36. Спосіб за п. 33, який додатково включає в себе: визначення помилки, пов'язаної із зазначеним сигналом витрати потоку; і корегування згаданого сигналу витрати потоку. 37. Спосіб за п. 33, в якому етап генерації зазначеного сигналу ваги включає в себе: забезпечення системи зважування транспортного засобу, сконфігурованої для формування згаданого сигналу ваги, при цьому система зважування транспортного засобу включає в себе перший датчик ваги і другий датчик ваги. 38. Спосіб за п. 37, в якому етап генерації зазначеного сигналу ваги далі включає: проведення процедури калібрування, в той час як при цьому вага машини для збирання врожаю залишається практично незмінною; і визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного із зазначеним другим датчиком ваги, таким чином, що сигнал ваги залишається по суті постійним протягом зазначеної процедури калібрування. 39. Спосіб за п. 37, в якому етап генерування зазначеного сигналу ваги далі включає: змінювання відомої ваги зазначеної машини для збирання урожаю таким чином, щоб змінювався сигнал ваги; і визначення першого калібрувального коефіцієнта, пов'язаного зі згаданим першим датчиком ваги, і другого калібрувального коефіцієнта, пов'язаного зі згаданим другим датчиком ваги, таким чином, що різниця в зазначеному сигналі ваги відповідає зазначеній відомій вазі. 40. Спосіб за п. 33, який додатково включає в себе: визначення помилки, пов'язаної із зазначеним сигналом витрати потоку, на основі зазначеного сигналу ваги; корегування згаданого сигналу витрати потоку з використанням зазначеної помилки для генерації скорегованого вимірювання витрати потоку; і відображення зазначеного скорегованого вимірювання витрати потоку. 41. Спосіб за п. 33, який додатково включає в себе: визначення помилки, пов'язаної із зазначеним сигналом витрати потоку, використовуючи значення зазначеного сигналу ваги, записаного в той час, як зазначений критерій якості даних був в межах зазначеного бажаного діапазону; корегування згаданого сигналу витрати потоку з використанням зазначеної помилки для генерації скорегованого вимірювання витрати потоку; і відображення зазначеного скорегованого вимірювання витрати потоку. 42. Спосіб за п. 33, який відрізняється тим, що критерій якості даних перевищує зазначене довірене порогове значення даних під час операцій вивантаження зернового бака. 43. Спосіб за п. 42, який відрізняється тим, що критерій якості даних вимірюється визначенням ваги розвантажувального шнека машини для збирання врожаю. 44. Спосіб за п. 33, який відрізняється тим, що критерій якості даних включає динамічний критерій транспортного засобу машини для збирання урожаю. 45. Спосіб за п. 33, який відрізняється тим, що критерій якості даних містить нахил комбайна. 46. Спосіб за п. 45, в якому згаданий нахил комбайна вимірюється за допомогою гіроскопічної рамки, встановленої на машині для збирання урожаю. 47. Спосіб за п. 33, який відрізняється тим, що критерій якості даних перевищує зазначений довірений поріг, коли хедер машини для збирання урожаю контактує з землею. 48. Спосіб за п. 47, в якому зазначений критерій якості даних вимірюється за допомогою датчика тиску, пов'язаного з виконавчим механізмом, і в якому вказаний виконавчий механізм визначає положення згаданого хедера. 49. Спосіб за п. 48, який відрізняється тим, що критерій якості даних визначається посиланням на відому вагу зазначеного хедера. 50. Спосіб за п. 33, який відрізняється тим, що критерій якості даних пов'язаний з фантомним корисним навантаженням, що містить частину зазначеного сигналу ваги. 15 UA 114785 C2 5 51. Спосіб за п. 50, в якому зазначене фантомне корисне навантаження визначають шляхом порівняння першого виміряного відхилення, виконаного першим пристроєм, і другого виміряного відхилення, виконаного другим пристроєм. 52. Спосіб за п. 51, в якому згаданий перший пристрій і вказаний другий пристрій включають тензометри, встановлені на машині для збирання врожаю і розташовані для вимірювання відхилення несучих компонентів машини для збирання врожаю. 16 UA 114785 C2 17 UA 114785 C2 18 UA 114785 C2 19 UA 114785 C2 20 UA 114785 C2 21 UA 114785 C2 22 UA 114785 C2 23 UA 114785 C2 24 UA 114785 C2 25 UA 114785 C2 26 UA 114785 C2 Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 27
ДивитисяДодаткова інформація
Назва патенту англійськоюMethods, systems, and apparatus for monitoring yield and vehicle
Автори англійськоюKoch, Justin, L., Sauder, Derek, E.
Автори російськоюКох Джастин Л., Саудер Дэрэк Э.
МПК / Мітки
МПК: A01D 41/14, A01D 41/127, G01F 25/00
Мітки: збирання, система, машини, калібрування, моніторингу, витрати, датчика, масової, врожаю, спосіб
Код посилання
<a href="https://ua.patents.su/29-114785-sposib-i-sistema-dlya-monitoringu-zbirannya-vrozhayu-dlya-mashini-dlya-zbirannya-vrozhayu-i-sposib-kalibruvannya-datchika-masovo-vitrati-u-mashini-dlya-zbirannya-vrozhayu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і система для моніторингу збирання врожаю для машини для збирання врожаю і спосіб калібрування датчика масової витрати у машині для збирання врожаю</a>
Спосіб збирання незернової частини врожаю та сіна
Номер патенту: 69423
Опубліковано: 25.04.2012
Автор: Малюта Сергій Іванович
МПК: A01F 29/01
Мітки: врожаю, збирання, спосіб, сіна, незернової, частини
Формула / Реферат:
Спосіб збирання незернової частини врожаю та сіна, що включає скошування маси, укладання її в валки, підбирання валків, формування рулонів, навантажування рулонів на транспортні засоби, транспортування до місця складування, вивантаження та складування, який відрізняється тим, що рулони формують за розмірами, близькими до розмірів платформи транспортного засобу, та навантажують їх безпосередньо в транспортний засіб.
Спосіб інтенсифікації збирання врожаю зернових культур
Номер патенту: 29397
Опубліковано: 10.01.2008
Автори: Бакум Марія Миколаївна, Бобрусь Іван Степанович, Нікітін Станіслав Петрович, Бакум Микола Васильович, Нікітіна Олена Станіславівна
МПК: A01D 34/00, A01D 41/00, A01D 42/00, A01D 43/00
Мітки: спосіб, культур, врожаю, зернових, інтенсифікації, збирання
Формула / Реферат:
Спосіб інтенсифікації збирання врожаю зернових культур, що включає обчісування колосків на корені, подачу обчісаного зернового вороху до молотарки, обмолот колосків, очищення зернового вороху від домішок та збір зерна в бункері, який відрізняється тим, що після обчісування зерновий ворох попередньо сепарують з виділенням вимолоченого при обчісуванні зерна до бункера, а необмолочених колосків - до молотарки.
Спосіб збирання врожаю та система накопичування зібраного продукту
Номер патенту: 95228
Опубліковано: 25.07.2011
Автори: Пікетт Теренс Д., Февр Стивен М.
МПК: A01F 25/14, A01D 41/12, A01D 90/00
Мітки: зібраного, продукту, спосіб, врожаю, збирання, система, накопичування
Формула / Реферат:
1. Спосіб збирання врожаю, який включає наступні стадії: стадію, на якій зібраний продукт накопичують у безперервно утворюваному гнучкому контейнері, який сконфігурований у формі труби, при цьому труба сформована з безперервного листа з гнучкого пластмасового матеріалу; стадію, на якій зібраний продукт в окремих секціях безперервно утворюваного гнучкого контейнера ущільнюють таким чином, що зібраний продукт, ущільнений всередині першої...
Спосіб та пристрій для визначення масової витрати для пневматичної посівної та/або тукової машини
Номер патенту: 104583
Опубліковано: 25.02.2014
Автори: Джеймс З. Ліу, Джеймс Дж. Фелан, Доналд К. Лендфаір
МПК: A01C 17/00, A01C 7/08, A01C 7/10, G01F 1/08
Мітки: визначення, витрати, тукової, пристрій, посівної, спосіб, масової, машини, пневматичної
Формула / Реферат:
1. Пристрій для визначення витрати для пневматичної посівної та/або тукової машини, що містить джерело матеріалу у вигляді твердих часток і пристрій дозування матеріалу, пневматичну систему подачі, яка містить вертикальний розподільний стояк, для передачі матеріалу із зазначеного джерела в ґрунт, що містить: перший датчик, що встановлений у пневматичній системі подачі для видачі першого сигналу, який вказує на силу, з якою матеріал у...
Спосіб керування збиральною машиною, спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану та спосіб розділення зібраного продукту для збиральної машини
Номер патенту: 92501
Опубліковано: 10.11.2010
Автори: Пікетт Теренс Деніел, Хендріксон Ларрі Лі
МПК: A01B 69/00
Мітки: лану, збиральної, зібраного, машини, керованої, збиральною, розділення, визначення, продукту, культури, керування, спосіб, машиною, сільськогосподарсько, врожаю, шляху, збирання
Формула / Реферат:
1. Спосіб керування збиральною машиною для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії:а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану, причому інформація відноситься до однієї або кількох властивостей сільськогосподарської культури;б) стадію, на якій специфічну для ділянки інформацію...
Попередній патент: Мангал, шампур для одночасного приготування великої кількості шашлику
Наступний патент: Спосіб утворення вхідного отвору надфуркально-періодонтального каналу і його пластика кістково-окісно-слизовим клаптем
Випадковий патент: Спосіб діагностики розвитку атеросклерозу