Спосіб (варіанти) і пристрій (варіанти) для передачі даних та спосіб (варіанти) і пристрій (варіанти) для прийому даних
Номер патенту: 83201
Опубліковано: 25.06.2008
Автори: Говард Стівен Дж., Уолтон Джей Родні, Кетчум Джон У., Уоллейс Марк

Формула / Реферат
1. Спосіб передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:
вибирають щонайменше два користувальницькі термінали для передачі даних;
вибирають режим направленого просторового мультиплексування з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, для використання з щонайменше двома користувальницькими терміналами;
вибирають швидкості для множини потоків даних, призначених для передачі через множину просторових каналів для щонайменше двох користувальницьких терміналів; і
планують щонайменше два користувальницьких термінали для передачі даних з вибраними швидкостями і вибраним режимом просторового мультиплексування.
2. Спосіб за п.1, в якому один користувальницький термінал вибирають для передачі даних і вибраний режим просторового мультиплексування є режимом направленого просторового мультиплексування.
3. Спосіб за п. 2, що додатково містить етап, на якому:
виконують просторову обробку множини потоків даних з множиною напрямних векторів для передачі множини потоків даних по ортогональних просторових каналах в один користувальницький термінал.
4. Спосіб за п. 1, в якому один користувальницький термінал вибирають для передачі даних, і вибраний режим просторового мультиплексування є режимом ненаправленого просторового мультиплексування.
5. Спосіб за п. 4, що додатково містить етап, на якому:
забезпечують множину потоків даних для передачі через множину антен в один користувальницький термінал.
6. Спосіб за п. 1, що додатково містить етап, на якому:
виконують просторову обробку множини потоків даних з множиною напрямних векторів для направлення множини потоків даних до щонайменше двох користувальницьких терміналів.
7. Спосіб за п. 1, що додатково містить етап, на якому:
виконують просторову обробку у приймачі множини прийнятих потоків символів для одержання оцінок множини потоків даних, що передаються множиною користувальницьких терміналів, причому кожний потік даних обробляють з відповідним напрямним вектором для направлення потоку даних.
8. Спосіб за п. 1, в якому для передачі даних вибирають множину користувальницьких терміналів, і вибраний режим просторового мультиплексування є режимом ненаправленого просторового мультиплексування.
9. Спосіб за п. 8, що додатково містить етап, на якому:
виконують просторову обробку у приймачі множини прийнятих потоків символів для одержання оцінок множини потоків даних, що передаються множиною користувальницьких терміналів.
10. Спосіб за п. 8, що додатково містить етап, на якому:
забезпечують множину потоків даних для передачі через множину антен у множину користувальницьких терміналів, кожний з яких має множину антен.
11. Спосіб за п. 1, в якому МІМО система являє собою систему дуплексного зв'язку з часовим розділенням каналів (TDD).
12. Спосіб за п. 11, в якому вибраний режим просторового мультиплексування являє собою режим направленого просторового мультиплексування, якщо щонайменше калібрується один користувальницький термінал, і відгук низхідного каналу є взаємооберненим відгуку висхідного каналу.
13. Спосіб за п. 11, в якому вибраний режим просторового мультиплексування являє собою режим ненаправленого просторового мультиплексування, якщо щонайменше не калібрується один користувальницький термінал, і відгук низхідного каналу не є взаємооберненим відгуку висхідного каналу.
14. Спосіб за п. 1, в якому вибір множини швидкостей включає в себе:
оцінку співвідношень сигнал/шум-і-перешкоди (ССШ) множини просторових каналів; і
вибір швидкостей, базуючись на оцінених ССШ множини просторових каналів.
15. Пристрій для передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
пристрій вибору терміналів, виконаний з можливістю вибору щонайменше двох користувальницьких терміналів для передачі даних;
пристрій вибору режиму, виконаний з можливістю вибору режиму направленого просторового мультиплексування з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, для використання з щонайменше двома користувальницькими терміналами;
пристрій вибору швидкості, виконаний з можливістю вибору швидкостей для множини потоків даних, призначених для передачі через множину просторових каналів каналу МІМО для щонайменше двох користувальницьких терміналів; і
планувальник, виконаний з можливістю планування щонайменше двох користувальницьких терміналів для передачі даних з вибраними швидкостями і вибраним режимом просторового мультиплексування.
16. Пристрій за п. 15, що додатково містить:
передавальний просторовий процесор, виконаний з можливістю просторової обробки множини потоків даних згідно з вибраним режимом просторового мультиплексування для одержання множини потоків символів передачі для передачі через множину антен у щонайменше два користувальницьких термінали.
17. Пристрій за п. 15, що додатково містить:
приймальний просторовий процесор, виконаний з можливістю просторової обробки множини потоків прийнятих символів згідно з вибраним режимом просторового мультиплексування для одержання оцінок множини потоків даних, переданих щонайменше двома користувальницькими терміналами.
18. Пристрій для передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
засіб вибору щонайменше двох користувальницьких терміналів для передачі даних;
засіб вибору режиму направленого просторового мультиплексування з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, для використання з щонайменше двома користувальницькими терміналами;
засіб вибору швидкостей для множини потоків даних, призначених для передачі через множину просторових каналів каналу МІМО для щонайменше двох користувальницьких терміналів; і
засіб планування щонайменше двох користувальницьких терміналів для передачі даних з вибраними швидкостями і вибраним режимом просторового мультиплексування.
19. Пристрій за п. 18, що додатково містить:
засіб просторової обробки множини потоків даних згідно з вибраним режимом просторового мультиплексування для одержання множини потоків символів передачі для передачі через множину антен у щонайменше один користувальницький термінал.
20. Пристрій за п.18, що додатково містить:
засіб просторової обробки множини потоків прийнятих символів відповідно до вибраного режиму просторового мультиплексування для одержання оцінок множини потоків даних, переданих щонайменше одним користувальницьким терміналом.
21. Спосіб прийому даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:
виконують просторову обробку в приймачі першої множини потоків прийнятих символів відповідно до першого режиму просторового мультиплексування для одержання першої множини потоків відновлених символів даних;
демодулюють і декодують першу множину потоків відновлених символів даних відповідно до першої множини швидкостей для одержання першої множини потоків декодованих даних;
виконують просторову обробку у приймачі другої множини потоків прийнятих символів відповідно до другого режиму просторового мультиплексування для одержання другої множини потоків відновлених символів даних; і
демодулюють і декодують другу множину потоків відновлених символів даних відповідно до другої множини швидкостей для одержання другої множини потоків декодованих даних.
22. Спосіб за п. 21, в якому перший режим просторового мультиплексування являє собою режим направленого просторового мультиплексування, і в якому виконують просторову обробку першої множини потоків прийнятих символів з множиною власних векторів для множини просторових каналів МІМО каналу для користувальницького терміналу.
23. Спосіб за п. 21, в якому другий режим просторового мультиплексування являє собою режим ненаправленого просторового мультиплексування.
24. Спосіб за п. 23, в якому друга множина потоків декодованих даних являє собою оцінки множини потоків даних, що передаються одним користувальницьким терміналом.
25. Спосіб за п. 23, в якому друга множина потоків декодованих даних являє собою оцінки множини потоків даних, що передаються одночасно множиною користувальницьких терміналів.
26. Спосіб за п. 23, в якому виконують просторову обробку другої множини потоків прийнятих символів, базуючись на способі інверсії кореляційної матриці каналу (ССМІ).
27. Спосіб за п. 23, в якому виконують просторову обробку другої множини потоків прийнятих символів, базуючись на способі мінімальної середньої квадратичної помилки (MMSE).
28. Спосіб за п. 23, в якому виконують просторову обробку другої множини потоків прийнятих символів, базуючись на способі послідовного видалення перешкод (SIC).
29. Пристрій для прийому даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
приймальний просторовий процесор, виконаний з можливістю
виконання просторової обробки у приймачі першої множини потоків прийнятих символів відповідно до першого режиму просторового мультиплексування для одержання першої множини потоків відновлених символів даних, і
виконання просторової обробки у приймачі другої множини потоків прийнятих символів відповідно до другого режиму просторового мультиплексування для одержання другої множини потоків відновлених символівданих; і
приймальний процесор даних, виконаний з можливістю
демодулювання і декодування першої множини потоків відновлених символів даних відповідно до першої множини швидкостей для одержання першої множини потоків декодованих даних, і
демодулювання і декодування другої множини потоків відновлених символів даних відповідно до другої множини швидкостей для одержання другої множини потоків декодованих даних.
30. Спосіб передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:
приймають інформацію, що вказує режим просторового мультиплексування і множину швидкостей для використання для передачі даних, причому режим просторового мультиплексування вибирають з множини режимів просторового мультиплексування, підтримуваних системою, і, причому кожну з множини швидкостей вибирають з набору швидкостей, підтримуваного даною системою;
кодують і модулюють множину потоків даних відповідно до множини швидкостей для одержання множини потоків символів даних; і
виконують просторову обробку множини потоків символів даних відповідно до режиму просторового мультиплексування для одержання множини потоків символів передачі для передачі через множину антен.
31. Спосіб за п. 30, в якому режим просторового мультиплексування являє собою режим направленого просторового мультиплексування, і, в якому виконують просторову обробку множини потоків символів даних з множиною напрямних векторів для передачі множини потоків символів даних по множині ортогональних просторових каналів МІМО каналу.
32. Спосіб за п. 31, що додатково містить етап, на якому:
передають направлений пілот-сигнал по кожному каналу з множини ортогональних просторових каналів.
33. Спосіб за п. 30, в якому режим просторового мультиплексування являє собою режим ненаправленого просторового мультиплексування, і в якому множину потоків символів даних надають як множину потоків символів передачі.
34. Спосіб за п. 30, що додатково містить етап, на якому: виконують калібрування таким чином, що відгук висхідного каналу є взаємооберненим відгуку низхідного каналу.
35. Пристрій для передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
контролер, виконаний з можливістю прийому інформації, яка вказує режим просторового мультиплексування і множину швидкостей для використання для передачі даних, причому режим просторового мультиплексування вибирають з множини режимів просторового мультиплексування, підтримуваних системою, і, причому кожну з множини швидкостей вибирають з набору швидкостей, підтримуваного даною системою;
передавальний процесор даних, виконаний з можливістю кодування і модулювання множини потоків даних відповідно до множини швидкостей для одержання множини потоків символів даних; і
передавальний просторовий процесор, виконаний з можливістю виконання просторової обробки множини потоків символів даних відповідно до режиму просторового мультиплексування для одержання множини потоків символів передачі для передачі через множину антен.
36. Спосіб прийому даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:
приймають інформацію, що вказує режим направленого просторового мультиплексування і щонайменше одну швидкість для використання для передачі даних, причому режим направленого просторового мультиплексування вибирають з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, і, причому кожну з щонайменше однієї швидкості вибирають з набору швидкостей, підтримуваного даною системою;
виконують просторову обробку щонайменше одного потоку прийнятих символів відповідно до режиму направленого просторового мультиплексування для одержання щонайменше одного потоку відновлених символів даних; і
демодулюють і декодують щонайменше один потік відновлених символів даних відповідно до щонайменше однієї швидкості для одержання щонайменше одного потоку декодованих даних.
37. Спосіб за п. 36, в якому один з множини режимів просторового мультиплексування являє собою режим ненаправленого просторового мультиплексування.
38. Спосіб за п. 37, в якому виконують просторову обробку множини потоків прийнятих символів, базуючись на способі інверсії кореляційної матриці каналу (ССМІ), способі мінімальної середньої квадратичної помилки (MMSE) або способі послідовного видалення перешкод (SIC) для одержання множини потоків відновлених символів даних.
39. Спосіб за п. 37, в якому один потік прийнятих символів обробляють з оцінками посилення каналу для одержання одного потоку відновлених символів даних.
40. Пристрій для прийому даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
контролер, виконаний з можливістю прийому інформації, що вказує режим направленого просторового мультиплексування і щонайменше одну швидкість для використання для передачі даних, причому режим направленого просторового мультиплексування вибирають з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, і, причому кожну з щонайменше однієї швидкості вибирають з набору швидкостей, підтримуваного даною системою;
приймальний просторовий процесор, виконаний з можливістю виконання просторової обробки щонайменше одного потоку прийнятих символів відповідно до режиму направленого просторового мультиплексування для одержання щонайменше одного потоку відновлених символів даних; і
приймальний процесор даних, виконаний з можливістю демодулювання і декодування щонайменше одного потоку відновлених символів даних відповідно до щонайменше однієї швидкості для одержання щонайменше одного потоку декодованих даних.
41. Пристрій для прийому даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить:
засіб прийому інформації, що вказує режим направленого просторового мультиплексування і щонайменше одну швидкість для використання для передачі даних, причому режим направленого просторового мультиплексування вибирають з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, при цьому кожну з щонайменше однієї швидкості вибирають з набору швидкостей, підтримуваного даною системою;
засіб просторової обробки щонайменше одного потоку прийнятих символів відповідно до режиму направленого просторового мультиплексування для одержання щонайменше одного потоку відновлених символів даних; і
засіб демодулювання і декодування щонайменше одного потоку відновлених символів даних відповідно до вказаної щонайменше однієї швидкості для одержання щонайменше одного потоку декодованих даних.
42. Пристрій за п. 41, в якому один з множини режимів просторового мультиплексування є режимом ненаправленого просторового мультиплексування.
43. Пристрій за п. 41, в якому засіб просторової обробки містить засіб просторової обробки, оснований на способі інверсії кореляційної матриці каналу (ССМІ), способі мінімальної середньої квадратичної помилки (MMSE) або способі послідовного видалення перешкод (SIC) для одержання множини потоків відновлених символів даних.
44. Пристрій за п. 41, в якому засіб демодулювання і декодування містить засіб обробки щонайменше одного прийнятого потоку символів з оцінками посилення каналу для одержання одного потоку відновлених символів даних.
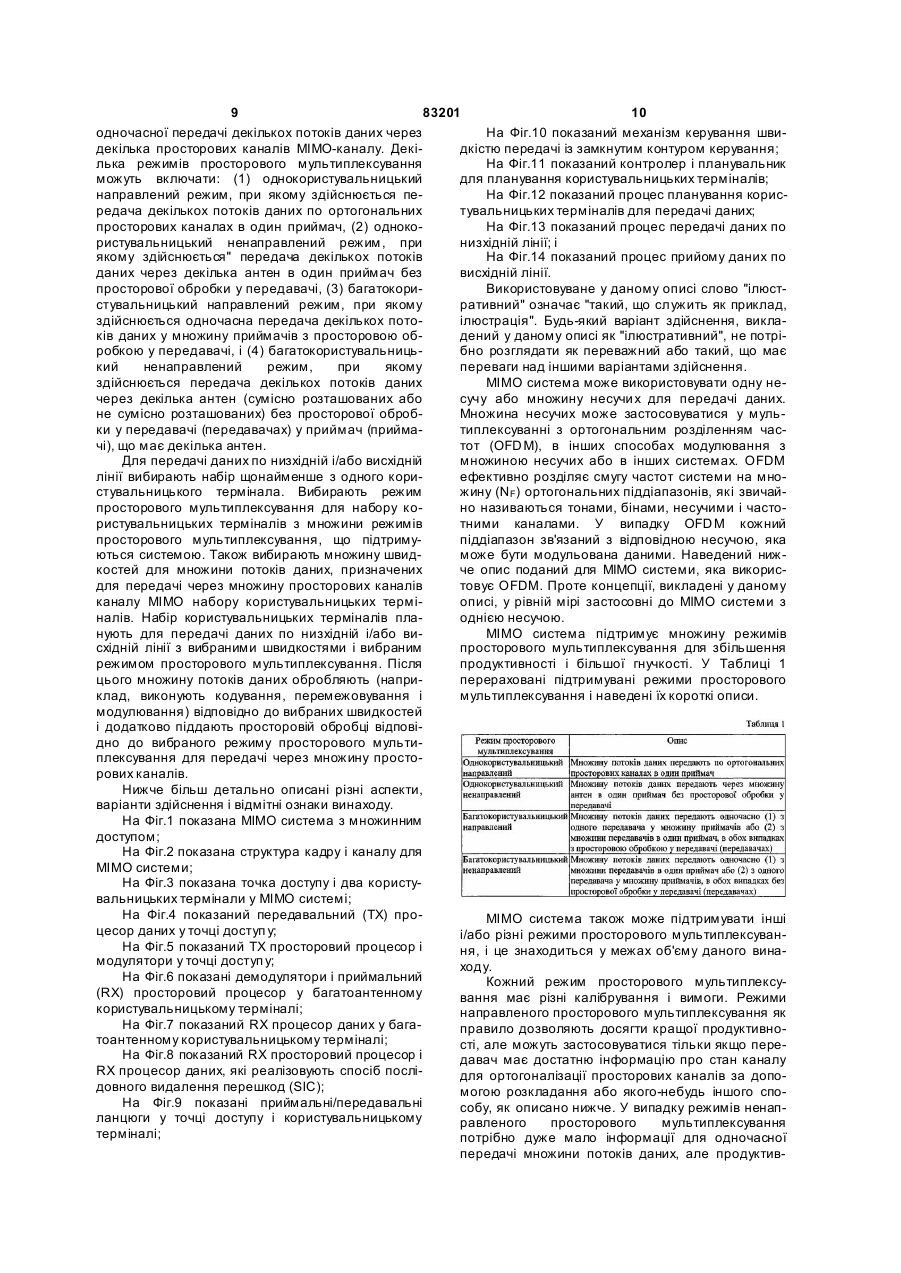
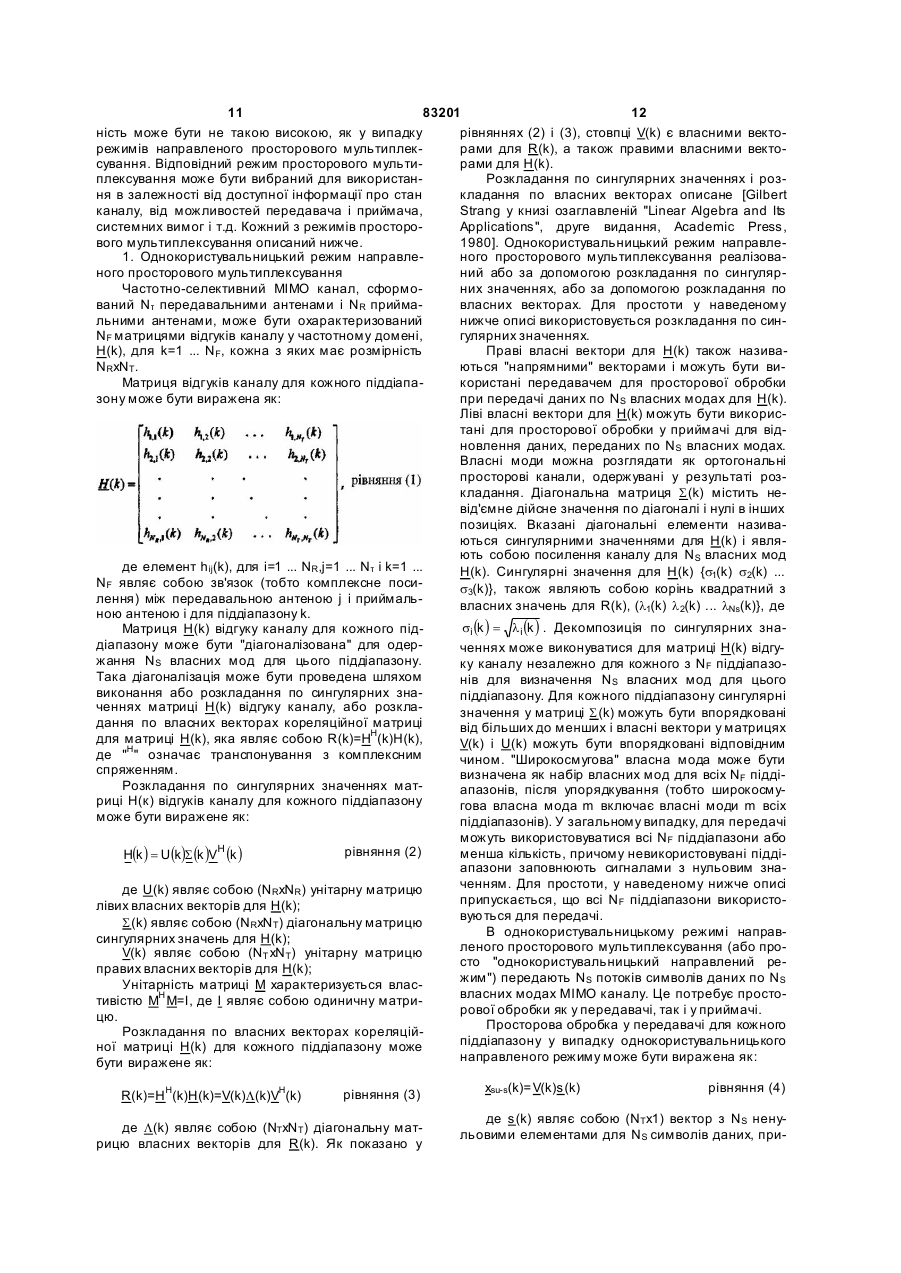
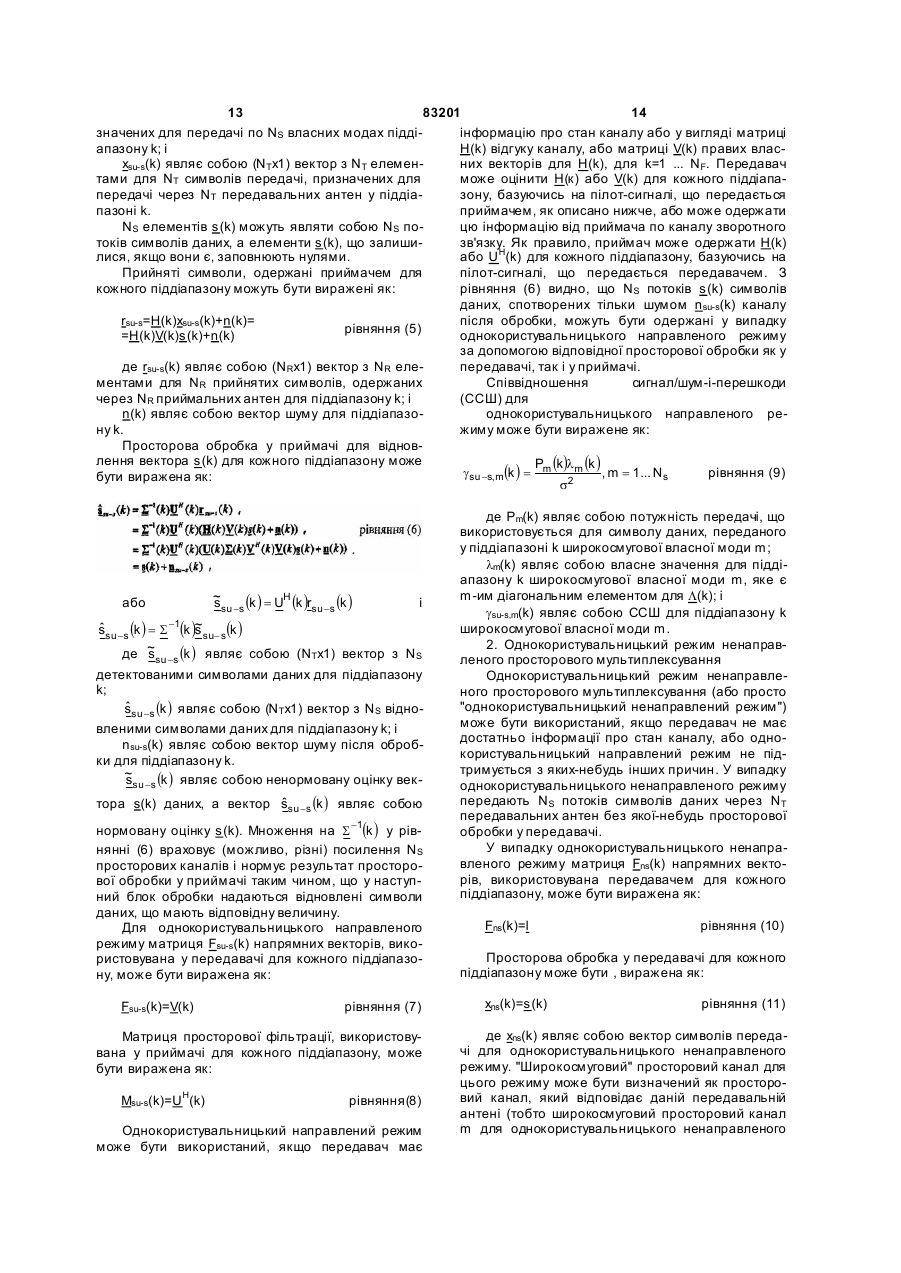
Текст
1. Спосіб передачі даних у безпровідній комунікаційній системі з множинним доступом з множиною входів і множиною виходів (МІМО), що містить етапи, на яких: вибирають щонайменше два користувальницькі термінали для передачі даних; вибирають режим направленого просторового мультиплексування з множини режимів просторового мультиплексування, один з яких є режимом направленого просторового мультиплексування, підтримуваних системою, для використання з щонайменше двома користувальницькими терміналами; вибирають швидкості для множини потоків даних, призначених для передачі через множину просторових каналів для щонайменше двох користувальницьких терміналів; і планують щонайменше два користувальницьких термінали для передачі даних з вибраними швидкостями і вибраним режимом просторового мультиплексування. 2. Спосіб за п. 1, в якому один користувальницький термінал вибирають для передачі даних і вибраний режим просторового мультиплексування є режимом направленого просторового мультиплексування. 3. Спосіб за п. 2, що додатково містить етап, на якому: виконують просторову обробку множини потоків даних з множиною напрямних векторів для пере 2 (19) 1 3 83201 4 12. Спосіб за п. 11, в якому вибраний режим проснаправленого просторового мультиплексування, торового мультиплексування являє собою режим підтримуваних системою, для використання з щонаправленого просторового мультиплексування, найменше двома користувальницькими термінаякщо щонайменше калібрується один користувалами; льницький термінал, і відгук низхідного каналу є засіб вибору швидкостей для множини потоків взаємооберненим відгуку висхідного каналу. даних, призначених для передачі через множину 13. Спосіб за п. 11, в якому вибраний режим проспросторових каналів каналу МІМО для щонайметорового мультиплексування являє собою режим нше двох користувальницьких терміналів; і ненаправленого просторового мультиплексування, засіб планування щонайменше двох користувальякщо щонайменше не калібрується один користуницьких терміналів для передачі даних з вибранивальницький термінал, і відгук низхідного каналу ми швидкостями і вибраним режимом просторовоне є взаємооберненим відгуку висхідного каналу. го мультиплексування. 14. Спосіб за п. 1, в якому вибір множини швидко19. Пристрій за п. 18, що додатково містить: стей включає в себе: засіб просторової обробки множини потоків даних оцінку співвідношень сигнал/шум-і-перешкоди згідно з вибраним режимом просторового мульти(ССШ) множини просторових каналів; і плексування для одержання множини потоків симвибір швидкостей, базуючись на оцінених ССШ волів передачі для передачі через множину антен множини просторових каналів. у щонайменше один користувальницький термі15. Пристрій для передачі даних у безпровідній нал. комунікаційній системі з множинним доступом з 20. Пристрій за п.18, що додатково містить: множиною входів і множиною виходів (МІМО), що засіб просторової обробки множини потоків прийнмістить: ятих символів відповідно до вибраного режиму пристрій вибору терміналів, виконаний з можливіспросторового мультиплексування для одержання тю вибору щонайменше двох користувальницьких оцінок множини потоків даних, переданих щонайтерміналів для передачі даних; менше одним користувальницьким терміналом. пристрій вибору режиму, виконаний з можливістю 21. Спосіб прийому даних у безпровідній комунікавибору режиму направленого просторового мульційній системі з множинним доступом з множиною типлексування з множини режимів просторового входів і множиною виходів (МІМО), що містить мультиплексування, один з яких є режимом напраетапи, на яких: вленого просторового мультиплексування, підтривиконують просторову обробку в приймачі першої муваних системою, для використання з щонаймемножини потоків прийнятих символів відповідно до нше двома користувальницькими терміналами; першого режиму просторового мультиплексування пристрій вибору швидкості, виконаний з можливісдля одержання першої множини потоків відновлетю вибору швидкостей для множини потоків даних, них символів даних; призначених для передачі через множину простодемодулюють і декодують першу множину потоків рових каналів каналу МІМО для щонайменше двох відновлених символів даних відповідно до першої користувальницьких терміналів; і множини швидкостей для одержання першої мнопланувальник, виконаний з можливістю плануванжини потоків декодованих даних; ня щонайменше двох користувальницьких термівиконують просторову обробку у приймачі другої налів для передачі даних з вибраними швидкостямножини потоків прийнятих символів відповідно до ми і вибраним режимом просторового другого режиму просторового мультиплексування мультиплексування. для одержання другої множини потоків відновле16. Пристрій за п. 15, що додатково містить: них символів даних; і передавальний просторовий процесор, виконаний демодулюють і декодують другу множину потоків з можливістю просторової обробки множини потовідновлених символів даних відповідно до другої ків даних згідно з вибраним режимом просторовомножини швидкостей для одержання другої много мультиплексування для одержання множини жини потоків декодованих даних. потоків символів передачі для передачі через 22. Спосіб за п. 21, в якому перший режим простомножину антен у щонайменше два користувальрового мультиплексування являє собою режим ницьких термінали. направленого просторового мультиплексування, і 17. Пристрій за п. 15, що додатково містить: в якому виконують просторову обробку першої приймальний просторовий процесор, виконаний з множини потоків прийнятих символів з множиною можливістю просторової обробки множини потоків власних векторів для множини просторових канаприйнятих символів згідно з вибраним режимом лів МІМО каналу для користувальницького терміпросторового мультиплексування для одержання налу. оцінок множини потоків даних, переданих щонай23. Спосіб за п. 21, в якому другий режим простоменше двома користувальницькими терміналами. рового мультиплексування являє собою режим 18. Пристрій для передачі даних у безпровідній ненаправленого просторового мультиплексування. комунікаційній системі з множинним доступом з 24. Спосіб за п. 23, в якому друга множина потоків множиною входів і множиною виходів (МІМО), що декодованих даних являє собою оцінки множини містить: потоків даних, що передаються одним користувазасіб вибору щонайменше двох користувальницьльницьким терміналом. ких терміналів для передачі даних; 25. Спосіб за п. 23, в якому друга множина потоків засіб вибору режиму направленого просторового декодованих даних являє собою оцінки множини мультиплексування з множини режимів просторопотоків даних, що передаються одночасно множивого мультиплексування, один з яких є режимом ною користувальницьких терміналів. 5 83201 6 26. Спосіб за п. 23, в якому виконують просторову 32. Спосіб за п. 31, що додатково містить етап, на обробку другої множини потоків прийнятих симвоякому: лів, базуючись на способі інверсії кореляційної передають направлений пілот-сигнал по кожному матриці каналу (ССМІ). каналу з множини ортогональних просторових ка27. Спосіб за п. 23, в якому виконують просторову налів. обробку другої множини потоків прийнятих симво33. Спосіб за п. 30, в якому режим просторового лів, базуючись на способі мінімальної середньої мультиплексування являє собою режим ненаправквадратичної помилки (MMSE). леного просторового мультиплексування, і в якому 28. Спосіб за п. 23, в якому виконують просторову множину потоків символів даних надають як мнообробку другої множини потоків прийнятих симвожину потоків символів передачі. лів, базуючись на способі послідовного видалення 34. Спосіб за п. 30, що додатково містить етап, на перешкод (SIC). якому: виконують калібрування таким чином, що 29. Пристрій для прийому даних у безпровідній відгук висхідного каналу є взаємооберненим відгукомунікаційній системі з множинним доступом з ку низхідного каналу. множиною входів і множиною виходів (МІМО), що 35. Пристрій для передачі даних у безпровідній містить: комунікаційній системі з множинним доступом з приймальний просторовий процесор, виконаний з множиною входів і множиною виходів (МІМО), що можливістю містить: виконання просторової обробки у приймачі перконтролер, виконаний з можливістю прийому іншої множини потоків прийнятих символів відповідформації, яка вказує режим просторового мультино до першого режиму просторового мультиплекплексування і множину швидкостей для викориссування для одержання першої множини потоків тання для передачі даних, причому режим відновлених символів даних, і просторового мультиплексування вибирають з виконання просторової обробки у приймачі другої множини режимів просторового мультиплексуванмножини потоків прийнятих символів відповідно до ня, підтримуваних системою, і, причому кожну з другого режиму просторового мультиплексування множини швидкостей вибирають з набору швидкодля одержання другої множини потоків відновлестей, підтримуваного даною системою; них символів даних; і передавальний процесор даних, виконаний з можприймальний процесор даних, виконаний з можливістю кодування і модулювання множини потоків ливістю даних відповідно до множини швидкостей для демодулювання і декодування першої множини одержання множини потоків символів даних; і потоків відновлених символів даних відповідно до передавальний просторовий процесор, виконаний першої множини швидкостей для одержання перз можливістю виконання просторової обробки шої множини потоків декодованих даних, і множини потоків символів даних відповідно до демодулювання і декодування другої множини режиму просторового мультиплексування для потоків відновлених символів даних відповідно до одержання множини потоків символів передачі для другої множини швидкостей для одержання другої передачі через множину антен. множини потоків декодованих даних. 36. Спосіб прийому даних у безпровідній комуніка30. Спосіб передачі даних у безпровідній комуніційній системі з множинним доступом з множиною каційній системі з множинним доступом з множивходів і множиною виходів (МІМО), що містить ною входів і множиною виходів (МІМО), що містить етапи, на яких: етапи, на яких: приймають інформацію, що вказує режим направприймають інформацію, що вказує режим простоленого просторового мультиплексування і щонайрового мультиплексування і множину швидкостей менше одну швидкість для використання для педля використання для передачі даних, причому редачі даних, причому режим направленого режим просторового мультиплексування вибирапросторового мультиплексування вибирають з ють з множини режимів просторового мультиплекмножини режимів просторового мультиплексувансування, підтримуваних системою, і, причому кожня, один з яких є режимом направленого простону з множини швидкостей вибирають з набору рового мультиплексування, підтримуваних систешвидкостей, підтримуваного даною системою; мою, і, причому кожну з щонайменше однієї кодують і модулюють множину потоків даних відшвидкості вибирають з набору швидкостей, підповідно до множини швидкостей для одержання тримуваного даною системою; множини потоків символів даних; і виконують просторову обробку щонайменше одновиконують просторову обробку множини потоків го потоку прийнятих символів відповідно до режисимволів даних відповідно до режиму просторовому направленого просторового мультиплексування го мультиплексування для одержання множини для одержання щонайменше одного потоку віднопотоків символів передачі для передачі через влених символів даних; і множину антен. демодулюють і декодують щонайменше один потік 31. Спосіб за п. 30, в якому режим просторового відновлених символів даних відповідно до щонаймультиплексування являє собою режим направлеменше однієї швидкості для одержання щонайменого просторового мультиплексування, і, в якому нше одного потоку декодованих даних. виконують просторову обробку множини потоків 37. Спосіб за п. 36, в якому один з множини режисимволів даних з множиною напрямних векторів мів просторового мультиплексування являє собою для передачі множини потоків символів даних по режим ненаправленого просторового мультиплекмножині ортогональних просторових каналів МІМО сування. каналу. 7 83201 8 38. Спосіб за п. 37, в якому виконують просторову множиною входів і множиною виходів (МІМО), що обробку множини потоків прийнятих символів, бамістить: зуючись на способі інверсії кореляційної матриці засіб прийому інформації, що вказує режим напраканалу (ССМІ), способі мінімальної середньої квавленого просторового мультиплексування і щодратичної помилки (MMSE) або способі послідовнайменше одну швидкість для використання для ного видалення перешкод (SIC) для одержання передачі даних, причому режим направленого множини потоків відновлених символів даних. просторового мультиплексування вибирають з 39. Спосіб за п. 37, в якому один потік прийнятих множини режимів просторового мультиплексувансимволів обробляють з оцінками посилення кананя, один з яких є режимом направленого простолу для одержання одного потоку відновлених симрового мультиплексування, підтримуваних систеволів даних. мою, при цьому кожну з щонайменше однієї 40. Пристрій для прийому даних у безпровідній швидкості вибирають з набору швидкостей, підкомунікаційній системі з множинним доступом з тримуваного даною системою; множиною входів і множиною виходів (МІМО), що засіб просторової обробки щонайменше одного містить: потоку прийнятих символів відповідно до режиму контролер, виконаний з можливістю прийому іннаправленого просторового мультиплексування формації, що вказує режим направленого простодля одержання щонайменше одного потоку віднорового мультиплексування і щонайменше одну влених символів даних; і швидкість для використання для передачі даних, засіб демодулювання і декодування щонайменше причому режим направленого просторового мульодного потоку відновлених символів даних відпотиплексування вибирають з множини режимів провідно до вказаної щонайменше однієї швидкості сторового мультиплексування, один з яких є редля одержання щонайменше одного потоку декожимом направленого просторового дованих даних. мультиплексування, підтримуваних системою, і, 42. Пристрій за п. 41, в якому один з множини репричому кожну з щонайменше однієї швидкості жимів просторового мультиплексування є реживибирають з набору швидкостей, підтримуваного мом ненаправленого просторового мультиплексуданою системою; вання. приймальний просторовий процесор, виконаний з 43. Пристрій за п. 41, в якому засіб просторової можливістю виконання просторової обробки щообробки містить засіб просторової обробки, оснонайменше одного потоку прийнятих символів відваний на способі інверсії кореляційної матриці повідно до режиму направленого просторового каналу (ССМІ), способі мінімальної середньої квамультиплексування для одержання щонайменше дратичної помилки (MMSE) або способі послідоводного потоку відновлених символів даних; і ного видалення перешкод (SIC) для одержання приймальний процесор даних, виконаний з можмножини потоків відновлених символів даних. ливістю демодулювання і декодування щонайме44. Пристрій за п. 41, в якому засіб демодулюваннше одного потоку відновлених символів даних ня і декодування містить засіб обробки щонаймевідповідно до щонайменше однієї швидкості для нше одного прийнятого потоку символів з оцінками одержання щонайменше одного потоку декодовапосилення каналу для одержання одного потоку них даних. відновлених символів даних. 41. Пристрій для прийому даних у безпровідній комунікаційній системі з множинним доступом з Дана заявка на патент вимагає пріоритету попередньої [заявки на патент США №60/421,309, що називається "ΜΙΜΟ WL AN System", подана 25 жовтня 2002p.], право на яку передане правонаступнику даного винаходу, і яка включена у даний опис у всій своїй повноті як посилання. Даний винахід у загальному випадку * відноситься до зв'язку, і, більш конкретно, до комунікаційної системи з множиною входів і множиною виходів (ΜΙΜΟ). ΜΙΜΟ система як правило використовує для передачі даних декілька (ΝΤ) передавальних антен і декілька (NR) приймальних антен, і позначається, як система (NT, NR). ΜΙΜΟ канал, сформований ΝΤ передавальними і NR приймальними антенами, може бути розкладений на NS просторових каналів, де NS£min{N T, NR}. Для досягнення більшої загальної пропускної здатності, для передачі NS незалежних потоків даних можуть використовуватися NS просторових каналів. У загальному випадку, для одночасної передачі і відновлення декількох потоків даних, просторова обробка звичайно виконується у приймачі і може виконуватися або не виконуватися у передавачі. Відома ΜΙΜΟ система звичайно використовує визначену схему передачі для одночасної передачі декількох потоків даних. Ця схема передачі може бути вибрана на основі компромісу між різними факторами, такими як вимоги до системи, об'єм зворотного зв'язку з приймача у передавач, можливості передавача і приймача, і т.д. Передавач, приймач і система, до того ж, розроблені з можливістю підтримки вибраної схеми передачі і функціонування відповідно до неї. Вказана схема передачі звичайно має переважні ознаки, а також несприятливі ознаки, які можуть впливати на продуктивність системи. Таким чином, у даній галузі техніки існує потреба у ΜΙΜΟ системі, виконаній з можливістю досягнення підвищеної ефективності. Описана ΜΙΜΟ система, яка підтримує декілька режимів просторового мультиплексування (SM) для підвищення продуктивності і більшої гнучкості. Просторове мультиплексування відноситься до 9 83201 10 одночасної передачі декількох потоків даних через На Фіг.10 показаний механізм керування швидекілька просторових каналів МІМО-каналу. Декідкістю передачі із замкнутим контуром керування; лька режимів просторового мультиплексування На Фіг.11 показаний контролер і планувальник можуть включати: (1) однокористувальницький для планування користувальницьких терміналів; направлений режим, при якому здійснюється пеНа Фіг.12 показаний процес планування корисредача декількох потоків даних по ортогональних тувальницьких терміналів для передачі даних; просторових каналах в один приймач, (2) однокоНа Фіг.13 показаний процес передачі даних по ристувальницький ненаправлений режим, при низхідній лінії; і якому здійснюється" передача декількох потоків На Фіг.14 показаний процес прийому даних по даних через декілька антен в один приймач без висхідній лінії. просторової обробки у передавачі, (3) багатокориВикористовуване у даному описі слово "ілюстстувальницький направлений режим, при якому ративний" означає "такий, що служить як приклад, здійснюється одночасна передача декількох потоілюстрація". Будь-який варіант здійснення, виклаків даних у множину приймачів з просторовою обдений у даному описі як "ілюстративний", не потріробкою у передавачі, і (4) багатокористувальницьбно розглядати як переважний або такий, що має кий ненаправлений режим, при якому переваги над іншими варіантами здійснення. здійснюється передача декількох потоків даних ΜΙΜΟ система може використовувати одну нечерез декілька антен (сумісно розташованих або сучу або множину несучи х для передачі даних. не сумісно розташованих) без просторової обробМножина несучих може застосовуватися у мульки у передавачі (передавачах) у приймач (прийматиплексуванні з ортогональним розділенням часчі), що має декілька антен. тот (OFD M), в інших способах модулювання з Для передачі даних по низхідній і/або висхідній множиною несучих або в інших системах. OFDM лінії вибирають набір щонайменше з одного кориефективно розділяє смугу частот системи на мностувальницького термінала. Вибирають режим жину (NF) ортогональних піддіапазонів, які звичайпросторового мультиплексування для набору коно називаються тонами, бінами, несучими і частористувальницьких терміналів з множини режимів тними каналами. У випадку OFD M кожний просторового мультиплексування, що підтримупіддіапазон зв'язаний з відповідною несучою, яка ються системою. Також вибирають множину швидможе бути модульована даними. Наведений нижкостей для множини потоків даних, призначених че опис поданий для ΜΙΜΟ системи, яка викорисдля передачі через множину просторових каналів товує OFDM. Проте концепції, викладені у даному каналу ΜΙΜΟ набору користувальницьких терміописі, у рівній мірі застосовні до ΜΙΜΟ системи з налів. Набір користувальницьких терміналів плаоднією несучою. нують для передачі даних по низхідній і/або виΜΙΜΟ система підтримує множину режимів східній лінії з вибраними швидкостями і вибраним просторового мультиплексування для збільшення режимом просторового мультиплексування. Після продуктивності і більшої гнучкості. У Таблиці 1 цього множину потоків даних обробляють (наприперераховані підтримувані режими просторового клад, виконують кодування, перемежовування і мультиплексування і наведені їх короткі описи. модулювання) відповідно до вибраних швидкостей і додатково піддають просторовій обробці відповідно до вибраного режиму просторового мультиплексування для передачі через множину просторових каналів. Нижче більш детально описані різні аспекти, варіанти здійснення і відмітні ознаки винаходу. На Фіг.1 показана ΜΙΜΟ система з множинним доступом; На Фіг.2 показана структура кадру і каналу для ΜΙΜΟ системи; На Фіг.3 показана точка доступу і два користувальницьких термінали у ΜΙΜΟ системі; На Фіг.4 показаний передавальний (ТХ) проΜΙΜΟ система також може підтримувати інші цесор даних у точці доступ у; і/або різні режими просторового мультиплексуванНа Фіг.5 показаний ТХ просторовий процесор і ня, і це знаходиться у межах об'єму даного винамодулятори у точці доступ у; ходу. На Фіг.6 показані демодулятори і приймальний Кожний режим просторового мультиплексу(RX) просторовий процесор у багатоантенному вання має різні калібрування і вимоги. Режими користувальницькому терміналі; направленого просторового мультиплексування як На Фіг.7 показаний RX процесор даних у багаправило дозволяють досягти кращої продуктивнотоантенному користувальницькому терміналі; сті, але можуть застосовуватися тільки якщо переНа Фіг.8 показаний RX просторовий процесор і давач має достатню інформацію про стан каналу RX процесор даних, які реалізовують спосіб послідля ортогоналізації просторових каналів за доподовного видалення перешкод (SIC); могою розкладання або якого-небудь іншого споНа Фіг.9 показані приймальні/передавальні собу, як описано нижче. У випадку режимів ненапланцюги у точці доступу і користувальницькому равленого просторового мультиплексування терміналі;потрібно дуже мало інформації для одночасної передачі множини потоків даних, але продуктив 11 83201 12 ність може бути не такою високою, як у випадку рівняннях (2) і (3), стовпці V(k) є власними векторежимів направленого просторового мультиплекрами для R(k), a також правими власними вектосування. Відповідний режим просторового мультирами для Н(k). плексування може бути вибраний для використанРозкладання по сингулярних значеннях і розня в залежності від доступної інформації про стан кладання по власних векторах описане [Gilbert каналу, від можливостей передавача і приймача, Strang у книзі озаглавленій "Linear Algebra and Its системних вимог і т.д. Кожний з режимів простороApplications", друге видання, Academic Press, вого мультиплексування описаний нижче. 1980]. Однокористувальницький режим направле1. Однокористувальницький режим направленого просторового мультиплексування реалізованого просторового мультиплексування ний або за допомогою розкладання по сингулярЧастотно-селективний ΜΙΜΟ канал, сформоних значеннях, або за допомогою розкладання по ваний Ντ передавальними антенами і NR приймавласних векторах. Для простоти у наведеному льними антенами, може бути охарактеризований нижче описі використовується розкладання по синNF матрицями відгуків каналу у частотному домені, гулярних значеннях. Н(k), для k=1 ... NF, кожна з яких має розмірність Праві власні вектори для Н(k) також називаNRxNT. ються "напрямними" векторами і можуть бути виМатриця відгуків каналу для кожного піддіапакористані передавачем для просторової обробки зону може бути виражена як: при передачі даних по NS власних модах для Н(k). Ліві власні вектори для Н(k) можуть бути використані для просторової обробки у приймачі для відновлення даних, переданих по NS власних модах. Власні моди можна розглядати як ортогональні просторові канали, одержувані у результаті розкладання. Діагональна матриця S(k) містить невід'ємне дійсне значення по діагоналі і нулі в інших позиціях. Вказані діагональні елементи називаються сингулярними значеннями для Н(k) і являють собою посилення каналу для NS власних мод де елемент hij(k), для i=1 ... NR,j=1 ... Ντ і k=1 ... Н(k). Сингулярні значення для Н(k) {s1(k) s2(k) ... NF являє собою зв'язок (тобто комплексне посиs3(k)}, також являють собою корінь квадратний з лення) між передавальною антеною j і приймальвласних значень для R(k), (l1(k) l 2(k) ... lNs(k)}, де ною антеною i для піддіапазону k. si (k ) = l i (k ) . Декомпозиція по сингулярних знаМатриця Н(k) відгуку каналу для кожного піддіапазону може бути "діагоналізована" для одерченнях може виконуватися для матриці Н(k) відгужання NS власних мод для цього піддіапазону. ку каналу незалежно для кожного з N F піддіапазоТака діагоналізація може бути проведена шляхом нів для визначення NS власних мод для цього виконання або розкладання по сингулярних знапіддіапазону. Для кожного піддіапазону сингулярні ченнях матриці Н(k) відгуку каналу, або розклазначення у матриці S(k) можуть бути впорядковані дання по власних векторах кореляційної матриці від більших до менших і власні вектори у матрицях H для матриці Н(k), яка являє собою R(k)=H (k)H(k), V(k) і U(k) можуть бути впорядковані відповідним Н де " " означає транспонування з комплексним чином. "Широкосмугова" власна мода може бути спряженням. визначена як набір власних мод для всіх NF піддіРозкладання по сингулярних значеннях матапазонів, після упорядкування (тобто широкосмуриці Н(к) відгуків каналу для кожного піддіапазону гова власна мода m включає власні моди m всіх може бути виражене як: піддіапазонів). У загальному випадку, для передачі можуть використовуватися всі NF піддіапазони або рівняння (2) менша кількість, причому невикористовувані піддіH(k ) = U(k)S (k )VH (k ) апазони заповнюють сигналами з нульовим значенням. Для простоти, у наведеному нижче описі де U(k) являє собою (NRxNR) унітарну матрицю припускається, що всі NF піддіапазони використолівих власних векторів для Н(k); вуються для передачі. S(k) являє собою (NRxNT) діагональну матрицю В однокористувальницькому режимі направсингулярних значень для Н(k); леного просторового мультиплексування (або проV(k) являє собою (NT xNT) унітарну матрицю сто "однокористувальницький направлений реправих власних векторів для Н(k); жим") передають NS потоків символів даних по NS Унітарність матриці Μ характеризується власН власних модах ΜΙΜΟ каналу. Це потребує простотивістю М М=І, де І являє собою одиничну матрирової обробки як у передавачі, так і у приймачі. цю. Просторова обробка у передавачі для кожного Розкладання по власних векторах кореляційпіддіапазону у випадку однокористувальницького ної матриці Н(k) для кожного піддіапазону може направленого режиму може бути виражена як: бути виражене як: R(k)=НН(k)H(k)=V(k)L(k)VН(k) рівняння (3) де L(k) являє собою (NTxNT) діагональну матрицю власних векторів для R(k). Як показано у xsu-s(k)=V(k)s(k) рівняння (4) де s(k) являє собою (NTx1) вектор з NS ненульовими елементами для NS символів даних, при 13 83201 14 значених для передачі по NS власних модах піддіінформацію про стан каналу або у вигляді матриці апазону k; і Н(k) відгуку каналу, або матриці V(k) правих власxsu-s(k) являє собою (NTx1) вектор з ΝΤ елеменних векторів для Н(k), для k=1 ... NF. Передавач тами для ΝΤ символів передачі, призначених для може оцінити Н(к) або V(k) для кожного піддіапапередачі через ΝΤ передавальних антен у піддіазону, базуючись на пілот-сигналі, що передається пазоні k. приймачем, як описано нижче, або може одержати NS елементів s(k) можуть являти собою NS поцю інформацію від приймача по каналу зворотного токів символів даних, а елементи s(k), що залишизв'язку. Як правило, приймач може одержати Н(k) лися, якщо вони є, заповнюють нулями. або UH(k) для кожного піддіапазону, базуючись на Прийняті символи, одержані приймачем для пілот-сигналі, що передається передавачем. З кожного піддіапазону можуть бути виражені як: рівняння (6) видно, що NS потоків s(k) символів даних, спотворених тільки шумом nsu-s(k) каналу rsu-s=H(k)xsu-s(k)+n(k)= після обробки, можуть бути одержані у випадку рівняння (5) =H(k)V(k)s(k)+n(k) однокористувальницького направленого режиму за допомогою відповідної просторової обробки як у де rsu-s(k) являє собою (NRx1) вектор з NR елепередавачі, так і у приймачі. ментами для NR прийнятих символів, одержаних Співвідношення сигнал/шум-і-перешкоди через NR приймальних антен для піддіапазону k; і (ССШ) для n(k) являє собою вектор шуму для піддіапазооднокористувальницького направленого рену k. жиму може бути виражене як: Просторова обробка у приймачі для відновлення вектора s(k) для кожного піддіапазону може P (k)l (k ) gsu -s, m(k ) = m 2 m , m = 1... Ns рівняння (9) бути виражена як: s ~ ssu -s (k ) = UH (k )rsu -s (k ) або ˆ ssu -s (k ) = S де ~ s і (k )~su- s(k ) s (k ) являє su-s -1 собою (NTx1) вектор з NS детектованими символами даних для піддіапазону k; ˆ ssu-s (k ) являє собою (NTx1) вектор з NS відновленими символами даних для піддіапазону k; і nsu-s(k) являє собою вектор шуму після обробки для піддіапазону k. ~ ssu-s (k ) являє собою ненормовану оцінку векˆ тора s(k) даних, а вектор ssu-s (k ) являє собою нормовану оцінку s(k). Множення на S -1(k ) у рівнянні (6) враховує (можливо, різні) посилення NS просторових каналів і нормує результат просторової обробки у приймачі таким чином, що у наступний блок обробки надаються відновлені символи даних, що мають відповідну величину. Для однокористувальницького направленого режиму матриця Fsu-s(k) напрямних векторів, використовувана у передавачі для кожного піддіапазону, може бути виражена як: Fsu-s(k)=V(k) рівняння (7) Матриця просторової фільтрації, використовувана у приймачі для кожного піддіапазону, може бути виражена як: Msu-s(k)=UH(k) рівняння(8) Однокористувальницький направлений режим може бути використаний, якщо передавач має де Pm(k) являє собою потужність передачі, що використовується для символу даних, переданого у піддіапазоні k широкосмугової власної моди m; lm(k) являє собою власне значення для піддіапазону k широкосмугової власної моди m, яке є m-им діагональним елементом для L(k); і gsu-s,m(k) являє собою ССШ для піддіапазону k широкосмугової власної моди m. 2. Однокористувальницький режим ненаправленого просторового мультиплексування Однокористувальницький режим ненаправленого просторового мультиплексування (або просто "однокористувальницький ненаправлений режим") може бути використаний, якщо передавач не має достатньо інформації про стан каналу, або однокористувальницький направлений режим не підтримується з яких-небудь інших причин. У випадку однокористувальницького ненаправленого режиму передають NS потоків символів даних через Ν Τ передавальних антен без якої-небудь просторової обробки у передавачі. У випадку однокористувальницького ненаправленого режиму матриця Fns(k) напрямних векторів, використовувана передавачем для кожного піддіапазону, може бути виражена як: Fns(k)=l рівняння (10) Просторова обробка у передавачі для кожного піддіапазону може бути , виражена як: xns(k)=s(k) рівняння (11) де xns(k) являє собою вектор символів передачі для однокористувальницького ненаправленого режиму. "Широкосмуговий" просторовий канал для цього режиму може бути визначений як просторовий канал, який відповідає даній передавальній антені (тобто широкосмуговий просторовий канал m для однокористувальницького ненаправленого 15 83201 режиму включає в себе всі піддіапазони передавальної антени m). Прийняті символи, одержані приймачем для кожного піддіапазону можуть бути виражені як: rns(k)=H(k)xns(k)+n(k)=H(k)s(k)+n(k) рівняння (12) Приймач може відновити вектор s(k) даних, використовуючи різні способи обробки, такі як спосіб інверсії кореляційної матриці каналу (ССМІ) (який також відомий як спосіб "перетворення на нуль незначимих коефіцієнтів"), спосіб мінімальної середньої квадратичної помилки (MMSE), коректор з вирішальним зворотним зв'язком (DFE) і спосіб послідовного видалення перешкод (SIC) і т.д. А. Просторова обробка ССМІ Приймач може використовувати спосіб ССМІ для виділення потоків символів даних. ССМІ приймач використовує просторовий фільтр, що має відгук Mccmi(k), для k=1 ... NF, який може бути виражений як: Mcc mi(k)=[HH(k)H(k)]-1H(k)= =R1(k)H(k) рівняння (13) Просторова обробка у ССМІ приймачі у випадку однокористувальницького ненаправленого режиму може бути виражена як: ~ sccmi = Mccmi (k )r ns (k ) (k )HH (k)(H(k)s(k ) + n(k )) = s(k ) + n ccmi(k ) =R -1 рівняння (14) де ~ccmi(k ) являє собою (ΝTx1) вектор з NS відs новленими символами даних для піддіапазону k; і nCcmi(k)=Mcc mi(k)n(k) являє собою шум після ССМІ фільтрації для піддіапазону k. Аутоковаріаційна матриця jccmi(k) шуму після ССМІ фільтрації для кожного піддіапазону може бути виражена як: , min (Mmmse (k )) ë [ ] = H (k)[H(k )H (k ) + s l] Mmmse(k )= H (k) H(k )H (k ) + jnn (k ) H H H 2 j ccmi (k )= E[nccmi(k )nH i(k )] ccv = Mccmi (k)j (k )MH i(k ) ccv nn 2 -1 = s R (k ) gccmi,m (k ) = Pm (k ) rmm (k )s2 -1 рівняння (18) У другій рівності рівняння (18) припускається, що вектор n(k) шум у являє собою AWGN з нульовим середнім і дисперсією s2. Просторова обробка у MMSE приймачі у випадку однокористувальницького ненаправленого режиму складається з двох етапів. На першому етапі MMSE приймач множить вектор rns(k) для NR потоків прийнятих символів на матрицю Mmmse(k) MMSE просторового фільтру для одержання век , m = 1 ... N s рівняння (16) де Pm(k) являє собою потужність передачі, використовуван у для символу даних, переданого у піддіапазоні k широкосмугового просторового каналу m; rmm(k) являє собою m-й діагональний елемент R(k) для піддіапазону к; gccmi,m(k) являє собою ССШ для піддіапазону к широкосмугового просторового каналу m. Через структуру R(k) спосіб ССМІ може посилювати шум. В. Просторова обробка MMSE Приймач може використовувати MMSE для придушення перехресних перешкод між потоками символів даних і максимізувати ССШ відновлених потоків символів даних. MMSE приймач використовує просторовий фільтр, що має відгук матриці Mmms e(k), для k=1 ... NF, яку виводять таким чином, що середньоквадратична помилка між оціненим вектором даних з просторового фільтру і вектором s(k) даних мінімізована. MMSE критерій може бути виражений як: û -1 рівняння (15) де Ε[x] являє собою математичне очікуванням для х. В останній рівності рівняння (15) припускається, що шум n(k) являє собою адитивний білий Гауссівський шум (AWGN) з нульовим середнім, дисперсією s2 і а утоковаріаційною матрицею jссmі(k)=E[nссmі(k)nНссmі(k)]=s2І. У цьому випадку ССШ для ССМІ приймача може бути виражене як: = E (Mmmse(k )rns (k) - s(k))H (Mmmse(k )r ns (k) - s(k)) Рішення задачі оптимізації, описаної рівнянням (17), може бути одержане різними способами. В одному з ілюстративних способів матриця Mmms e(k) MMSE просторового фільтру для кожного піддіапазону може бути виражена як: H 16 рівняння (17) тора ~mmse (k ) для NS потоків детектованих симs волів наступним чином: ~ smmse = Mmmse (k )r ns (k ) = Mmmse (k )(H (k )s(k) + n (k )) = Q(k )s(k ) + nmmse (k ) рівняння (19) де nmmse(k)=Mmms e(k)n(k) являє собою шум після MMSE фільтрації, і Q(k)=Mmmse(k)H(k). NS потоків детектованих символів є ненормованими оцінками NS потоків символів даних. На другому етапі MMSE приймач множить вектор ~mmse на масштабуючу матрицю D-1mmse(k) s ˆ для одержання вектора smmse (k ) для NS потоків відновлених символів даних, наступним чином: -1 ˆ smmse (k ) = Dmmse (k )~mmse (k ) s рівняння (20) 17 83201 18 послідовно редукується на один стовпець для коде Dmmse(k) являє собою діагональну матрицю, жного при відновленні і видаленні потоку символів чиї діагональні елементи є діагональними елеменданих. Для етапу l редуковану матрицю Н l(k) відгутами Q(k), тобто, Dmmse(k)=diag[Q(k)]. NS потоків ку каналу одержують шляхом видалення (l-1) з відновлених символів даних є нормованими оцінвихідної матриці Н(k), відповідних (l-1) потокам ками NS потоків символів даних. заздалегідь відновлених символів даних, тобто, Використовуючи визначення оберненої матНl(k)=[hjl(k)hjl+1(k) … hjNT(k)], де hjn(k) являє собою риці, матриця Q(k) може бути представлена настуNRx1 вектор відгуку каналу між передавальною пним чином: антеною jn і NR приймальними антенами. Для етапу l, (l-1) потокам символів даних, відновлених на -1 попередніх етапах, присвоюють індекси {j1 j2 ... jl-1}, H -1 H -1 Q(k ) = H (k )jnn (k )H(k ) H (k )jnn (k )H(k ) + l і (ΝΤ-l+1) потокам символів даних, ще не відновлерівняння (21) -1 них, присвоюють індекси {jl jl+1 ... JNT}· = HH(k )H(k ) HH (k )H(k ) + s2l Для етапу l SIC приймач виводить матрицю Мlsic(k) просторової фільтрації, для k=1 ... NF, баУ другій рівності рівняння (21) припускається, зуючись на редукованій матриці Н l(к) відгук у канащо шум являє собою AWGN з нульовим середнім і лу (замість вихідної матриці Н(k)), використовуючи дисперсією s2 . спосіб ССМІ, як показано у рівнянні (13), спосіб ССШ для MMSE приймача може бути виражеMMSE, як показано у рівнянні (18) або який-небудь не як: інший спосіб. Матриця Мlsic(k) має розмірність (NTl+1)xN R. Оскільки Н l(к) є різною для кожного етапу, qmm (k ) матриця Мlsic(k) просторової фільтрації також є gmmse,m (k ) = , m =1... Ns рівняння(22) 1- qmm (k ) різною для кожного етапу. SIC приймач множить вектор rlsic(k) для NR потоків модифікованих символів на матрицю Мlsic(k) де qmm(k) являє собою m-й діагональний елепросторової фільтрації для одержання вектора мент Q(k) для піддіапазону k; і * gmms e,m(k) являє собою ССШ для піддіапазону k ~l (k ) для (ΝΤ-l+1) потоків детектованих символів s sic для широкосмугового просторового каналу m. наступним чином: С. Обробка у приймачі при послідовному видаленні перешкод Приймач може обробляти NR ~l = Ml (k )r l (k ) потоків прийнятих символів, використовуючи споs sic sic sic сіб SIC для відновлення NS потоків символів даl l l l рівняння (24) = M sic (k ) H (k )s (k ) + n (k ) них. У випадку способу SIC приймач спочатку виl l l = Q sic (k )s (k ) + n (k ) конує просторову обробку NR потоків прийнятих символів (наприклад, використовуючи ССМІ, MMSE або який-небудь інший спосіб) і одержує де nlsic(k)=Мlsic(k)nl(k) являє собою шум після один потік відновлених символів даних. Приймач фільтрації для піддіапазону k на етапі l, nl(k) являє виконує додаткову обробку (наприклад, виконує собою редукований вектор n(k), і демодулювання, обернене перемежовування і Qlsic(k)=Мlsic(k)HI(k). Потім SIC приймач вибирає декодування) потоку відновлених символів даних один з потоків детектованих символів для відновдля одержання потоку декодованих даних. Потім лення. Оскільки на кожному етапі відновлюють приймач оцінює перешкоду, яку цей потік створює тільки один потік символів даних, SIC приймач для інших NS-1 потоків символів даних і видаляє може просто вивести один (1xNR) вектор-рядок оцінену перешкоду з NR потоків прийнятих симвоm Ijl(k) просторової фільтрації для потоку {s jl} симлів для одержання NR потоків модифікованих символів даних, призначених для відновлення на етаволів. Потім приймач повторює таку ж обробку для пі l. Вектор-рядок m Ijl(k) являє собою один рядок NR потоків модифікованих символів для відновматриці Мlsic(k). У цьому випадку просторова обролення іншого потоку символів даних. бка для етапу l для відновлення потоку {s jl} симвоДля SIC приймача потоки вхідних (тобто прилів даних може бути виражена як: йнятих або модифікованих) символів для етапу l, де l=1 ... N S, можуть бути виражені як: ~ l l sjl (k ) = m jl (k )r sic (k ) = рівняння (25) l l l rlsic(k)=HI(k)xlns(k)+n(k)= = q jl (k )s (k ) + m jl (k )n (k ) рівняння (23) =HI(k)s l(k)+n(k) [ [ ] ] ( де rlsic(k) являє собою вектор NR модифікованих символів для піддіапазону k на етапі l, і r1sic(k)=rns(k) для першого етапу; s l(k) являє собою вектор (Ντ-l+1) символів даних, ще не відновлених, для піддіапазону k на етапі l; і Нl(к) являє собою NRx(NT-l+1) редуковану матрицю відгуку каналу для піддіапазону k на етапі l. У рівнянні (23) припускається, що потоки символів даних, відновлені на попередніх (l-1) етапах видалені. Розмірність матриці Н(к) відгуку каналу ) де qIjl(k) являє собою рядок Qlsic(k), що відповідає потоку {s jl} символів даних. У будь-якому випадку приймач виконує масштабування потоку ~jl детектованих символів для s { } одержання потоку {ˆ jl } s відновлених символів даних і виконує додаткову обробку (наприклад, виконує демодулювання, обернене перемежовування і ˆ декодування) потоку s jl для одержання потоку { } ˆ {d } декодованих даних. Приймач також формує jl 19 83201 20 оцінку перешкоди, яку цей потік , створює для інде qlmm(k) являє собою m-й діагональний елеших потоків символів даних, ще не відновлених. мент Qlsic(k) для піддіапазону k, де Qlsic(k), як покаДля оцінки перешкоди приймач виконує повторне зано у рівнянні (21), але базуючись на редукованій кодування, перемежовування і відображення симматриці НI(k) відгуку каналу замість вихідної матриці Н(k). ˆ волів потоку d jl декодованих даних таким же У загальному випадку, ССШ прогресивно поспособом, який виконується у передавачі і одерліпшується для потоків символів даних, відновле( жує потік s jl "повторно модульованих" символів, них на пізніх етапах, оскільки видаляються перешкоди від потоків символів даних, відновлених на який являє собою оцінку тільки що відновленого попередніх етапах. Це дозволяє використовувати потоку символів даних. Потім приймач виконує вищі швидкості передачі даних для потоків симвозгортку потоку повторно модульованих символів з лів даних, відновлених пізніше. кожним з NR елементів у векторі hjl(k) відгуку кана3. Багатокористувальницький режим направлу для потоку {s jl} для одержання NR компонентів леного просторового мультиплексування ijl(k) перешкоди, що створюється цим потоком. ПоБагатокористувальницький режим направлетім NR компонентів перешкоди віднімають з NR l ного просторового мультиплексування (або просто потоків r sic(k) модифікованих символів для етапу l "багатокористувальницький направлений режим") для одержання NR потоків rl+1sic(k) для наступного підтримує одночасну передачу даних від одного етапу l+1, тобто, rl+1sic(k)=rlsic(k)-ijl(k). Потоки rl+1sic(k) передавача до множини приймачів, базуючись на модифікованих символів являють собою потоки, "просторових сигнатурах" приймачів. Просторова які були б прийняті, якщо б потік {s jl} символів дасигнатура для приймача надається вектором відних не передавався (тобто, припускається, що гук у каналу (для кожного піддіапазону) між Ν Τ певидалення перешкоди було виконане ефективно). редавальними антенами і кожною приймальною SIC приймач обробляє NR потоків прийнятих антеною у приймачі. Передавач може одержати символів на NS послідовних етапах. Для кожного просторові сигнатури для приймачів, як це описаетапу SIC приймач (1) виконує просторову обробку но нижче. Потім передавач може (1) вибрати набір або NR потоків прийнятих символів, або NR потоків приймачів для одночасної передачі даних і (2) вимодифікованих символів з попереднього етапу для вести напрямні вектори для потоків символів даодержання одного потоку відновлених символів них, призначених для передачі у вибрані приймачі даних, (2) декодує цей потік відновлених символів таким чином, що перехресні перешкоди для потоданих для одержання відповідного потоку декодоків, що передаються, адекватно придушуються у ваних даних, (3) виконує оцінку і видаляє переприймачах. шкоду, пов'язану з цим потоком, і (4) одержує N R Напрямні вектори у випадку багатокористувапотоків модифікованих символів для наступного льницького направленого режиму можуть бути етапу. У випадку, якщо перешкода, пов'язана з виведені різними способами. Нижче описано дві кожним потоком даних, може бути точно оцінена і ілюстративні схеми. Для простоти наведений нижвидалена, то пізніше відновлені потоки даних у че опис поданий для одного піддіапазону і передменшій мірі схильні до впливу перешкод і можуть бачається, що кожний приймач обладнаний однією мати вище ССШ. антеною. У випадку способу SIC ССШ кожного потоку У схемі інверсії каналу передавач одержує навідновлених символів даних залежить від (1) спопрямні вектори для множини приймачів, викориссобу просторової обробки (наприклад, ССМІ або товуючи інверсію каналу. Спочатку передавач виMMSE), використовуваного на кожному етапі, (2) бирає ΝΤ одноантенних приймачів для одночасної конкретного етапу, на якому відновлюють даний передачі. Передавач одержує 1xΝΤ вектор-рядок потік символів даних, і (3) величини перешкоди, hi(k) відгуку каналу для кожного вибраного припов'язаної з потоками символів даних, відновлених ймача і формує NTxNT матрицю Hmu-s(k) відгуку на більш ранніх етапах. ССШ для SIC приймача з каналу з ΝΤ векторами-рядками для Ν Τ приймачів. ССМІ може бути виражене як: Потім передавач використовує інверсію каналу для одержання матриці Fmu-s(k) з ΝT напрямних Pm (k ) gsic -ccmi,m (k ) = l , векторів для Ν T вибраних приймачів наступним 2 рівняння (26) r mm (k )s чином: m = 1 ... N s {} { } де rlmm(k) являє собою гп-й діагональний елемент [Rl(k)]-1 для піддіапазону k, де RI(k)=[НI(k)]ННI(k). ССШ для SIC приймача з MMSE може бути виражене як: gsic -ccmi,m (k ) = m = 1... Ns qlmm (k ) 1 - qlmm (k ) -1 Fmu- s (k ) = Hmu -s (k ) Просторова обробка у передавачі для кожного піддіапазону для багатокористувальницького направленого режиму може бути виражена як: xmu-s(k)=F mu-s(k)s(k) Pm (k ), рівняння (27) рівняння (28) рівняння (29) де xmu-s(k) являє собою вектор символів передачі для багатокористувальницького направленого режиму. Прийняті символи в ΝT вибраних приймачах для кожного підціапазону можуть бути виражені як: 21 83201 rmu - s = Hmu -s (k )xmu- s (k ) + n(k ) = Hmu -s (k )Fmu- s (k )s(k) + n(k ) рівняння (30) = s(k ) + i(k ) + n(k ) де rmu-s(k) являє собою (NTx1) вектор прийнятих символів для підціапазону k і ΝΤ вибраних приймачів, і і(k) являє собою перехресну перешкоду внаслідок неідеальності оцінки Fmu-s(k) у передавачі. Кожний вибраний приймач повинен був би одержати тільки один елемент вектора rmu-s(k) для кожної приймальної антени. Якщо просторова обробка у передавачі є ефективною, то потужність, що міститься в і(k), є малою, і кожний потік відновлених символів даних схильний до малого впливу перехресних перешкод від (ΝΤ-1) інших потоків символів даних, що передаються в інші приймачі. Передавач також може передавати направлений пілот-сигнал у кожний вибраний приймач, як описано нижче. Потім кожний приймач може обробляти свій направлений пілот-сигнал для оцінки посилення і фази каналу і виконує когерентне демодулювання прийнятих символів від своєї однієї антени з оцінками посилення і фази для одержання потоків відновлених даних. ССШ, досяжні для багатокористувальницького направленого режиму, являють собою коваріаційну функцію матриці Hmu-s(k) відгуку каналу. Ви щі ССШ можуть бути досягнуті при виборі "сумісних" користувальницьких терміналів. Можуть оцінюватися різні набори і/або комбінації користувальницьких терміналів і для передачі даних може вибиратися набір/комбінація з найвищими ССШ. Хоча схема інверсії каналу є привабливою через свою простоту, у загальному випадку, вона забезпечує низьку продуктивність внаслідок того, що попередня обробка потоків символів даних з оберненою матрицею відгуку каналу у рівнянні (29) примушує передавач направляти основну частку його потужності у найгірші власні моди ΜΙΜΟ каналу. Також у деяких каналах, головним чином, у тих, що мають високу кореляцію між елементами Hmu-s(k), матриця відгуку каналу має неповний ранг, і обчислення оберненої до неї не є можливим. У схемі попереднього кодування передавач виконує попереднє кодування Ν Τ потоків символів даних, призначених для передачі в Ν Τ вибраних приймачах таким чином, що ці потоки символів даних піддаються у приймачах малим перехресним перешкодам. Передавач може формувати матрицю Hmu(k) відгуку каналу для Ν Τ вибраних приймачів. Потім передавач виконує QR факторизацію для Hmu(k) таким чином, що Hmu(k)=Ftri(k)Q mu(k), де Ftri(k) являє собою нижню ліву трикутну матрицю, a Qmu(k) являє собою унітарну матрицю. Передавач виконує операцію попереднього кодування вектора символу даних, призначеного для передачі s(k)=[s 1(k) s 2(k) ... SNT(k)]T, для одержання вектора заздалегідь кодованих символів а(k)=[a 1(k) a 2(k)... a NT(k)]T, наступним чином: 22 a l (k ) = l=1 ö 1 æ ç sl (k )å fli (k )a i ( )÷ mod(M / 2), k ÷ ç fll (k ) è i=1 ø для I = 1... NT рівняння (31) де Μ являє собою кількість рівнів, розділених одиничними інтервалами, у синфазній або квадратурній розмірності квадрата сигнального сузір'я QAM; і fli(k) являє собою елемент Ftri(k) у рядку і та стовпці j. Операція (mod) додає достатню кількість цілих співмножників Μ в аргумент таким чином, що результат задовольняє a l(k)Î[-M/2, M/2. a(k)Qmu(k)xmu-pc(k)=Qmu(k)a(k). Вектор прийнятих символів для схеми попереднього кодування може бути виражений як: rmu -pc (k ) = Hmu (k )Qmu (k )a (k ) + n (k ) = H = Ftri (k )a (k ) + n (k ) рівняння (32) Можна показати, що Ftri(k)a(k)mod(M/2)=s(k). Таким чином вектор символів даних може бути оцінений як _mu-pc(k)=rmu-pc(k)mod(M/2). Кожний з Ν Τ вибраних приймачів одержує тільки один з Ν Τ елементів rmu-pc(k) і може оцінити символи даних, передані йому за допомогою виконання операції mod(M/2) для його прийнятих символів. У багатокористувальницькому направленому режимі передавач також може передавати множину потоків символів даних у багатоантенний приймач. Матриця Hmu(k) відгуку каналу при цьому включає один вектор-рядок для кожної приймальної антени багатоантенного приймача. Багатокористувальницький направлений режим також підтримує передачу даних від множини багатоантенних передавачів в один приймач. Кожний багатоантенний передавач виконує просторову обробку свого потоку символів даних для орієнтації потоку у напрямі приймача. Кожний передавач також передає у приймач направлений пілот-сигнал. Для приймача кожний передавач виглядає як одинична передача. Приймач виконує просторову обробку (наприклад, ССМІ, MMSE і т.д.) для відновлення направлених потоків символів даних для всі х передавачів. 4. Багатокористувальницький режим ненаправленого просторового мультиплексування Багатокористувальницький режим ненаправленого просторового мультиплексування (або просто "багатокористувальницький ненаправлений режим") підтримує одночасну передачу даних (1) одним передавачем у множину приймачів (наприклад, для низхідної лінії) і (2) множиною передавачів в один приймач (наприклад, для висхідної лінії). При ненаправленій передачі від одного передавача у множину приймачів передавач передає один потік символів даних через кожну передавальну антену для приймального приймача. Для кожного приймального приймача можуть передаватися один або декілька потоків символів даних. Кожний приймальний приймач включає в себе, щонайменше, ΝT і може виконувати просторову 23 83201 24 обробку для ізоляції і відновлення його потоку (полу для всіх передавачів, як якщо б вони були одтоків) символів даних. Кожний приймач, що потреним передавачем. Передавач може відновити бує передачі даних, оцінює ССШ для кожної з Ν T множину потоків символів даних, використовуючи передавальних антен і надсилає Ν T оцінок ССШ у будь-який зі способів, описаних вище для однокопередавач. Передавач вибирає набір приймачів ристувальницького ненаправленого режиму (надля передачі даних, базуючись на оцінках ССШ від приклад, способи ССМІ, MMSE і SIC). всіх приймачів, що потребують передачі даних 5. Просторова обробка (наприклад, максимізуючи загальну пропускну здаУ таблиці 2 зведені способи просторової обтність). робки у передавачі і приймачі для чотирьох режиПри ненаправленій передачі від множини пемів просторового мультиплексування, описаних редавачів в один приймач передавачі передають вище. Для ненаправлених режимів також можуть потоки символів даних через їх антени (тобто, без бути використані способи обробки у приймачі, відпросторової обробки) таким чином, що ці потоки мінні від ССМІ і MMSE. Останній стовпець у табнадходять у приймач приблизно вирівняні за чалиці 2 вказує, чи може застосовуватися у приймачі сом. Приймач може оцінити матрицю відгуку канаспосіб SIC. Для простоти, просторова обробка для багатокористувальницького направленого режиму від множини передавачів в один приймач і багатокористувальницького ненаправленого режиму від одного передавача у множину приймачів у таблиці 2 не показана. У наведеному нижче описі широкосмуговий просторовий канал може відповідати (1) широкосмуговій власній моді для режиму направленого просторового мультиплексування, (2) передавальній антені для режиму ненаправленого просторового мультиплексування або (3) комбінації одного або декількох просторових каналів для одного або декількох піддіапазонів. Широкосмуговий просторовий канал може бути використаний для передачі одного незалежного потоку даних. 6. ΜΙΜΟ система На Фіг.1 показана ΜΙΜΟ система 100 множинного доступу з декількома точками 110 доступу (АР), які підтримують обмін даними з декількома користувальницькими терміналами (UT) 120. Для простоти на Фіг.1 показано тільки дві точки 110а і 110b доступу. Точка доступу у загальному випадку є нерухомою станцією, яка використовується для зв'язку з користувальницькими терміналами і також може називатися базовою станцією або якимнебудь іншим терміном. Користувальницький термінал може бути фіксованим або мобільним і також може називатися мобільною станцією, безпровідним пристроєм або яким-небудь іншим терміном. Контролер 130 системи з'єднаний з точ ками 110 доступу і забезпечує їх координацію і керування для них. ΜΙΜΟ система 100 може бути системою дуплексної передачі з часовим розділенням каналів (TDD) або системою дуплексної передачі з частотним розділенням каналів (FDD). Пряма і зворотна лінія (1) для системи TDD зв'язку спільно використовують один діапазон частот і (2) використовують різні діапазони частот для системи FDD. У наведеному нижче описі припускається, що ΜΙΜΟ система 100 являє собою систему TDD. ΜΙΜΟ система 100 використовує набір транспортних каналів для передачі різних типів даних. Транспортні канали можуть бути реалізовані різними способами. На Фіг.2 показана ілюстративна структура 200 кадру і каналу, яка може використовуватися у ΜΙΜΟ системі 100. Передача даних відбувається у кадрах TDD. Кожний TDD кадр триває заданий проміжок часу, наприклад, 2мсек, і розділений на фазу низхідної лінії і фазу висхідної лінії. Кожна фаза додатково розділена на множину сегментів, 210, 220, 230, 240 і 250 для множини транспортних каналів. У фазі низхідної лінії широкомовний канал (ВСН) несе маяк пілот-сигналу 214, ΜΙΜΟ пілотсигналу 216 і ВСН повідомлення 218. Маяк пілотсигналу використовують для одержання таймування і частоти. ΜΙΜΟ пілот-сигналу використовують для оцінки каналу. ВСН повідомлення містить системні параметри для користувальницьких терміналів. Прямий керуючий канал (FCCH) несе ін 25 83201 26 формацію планувальника для призначення ресурристувальницького термінала 120х RX просторосів низхідній лінії і висхідній лінії та іншу сигналізавий процесор 360х виконує когерентне демодулюцію для користувальницьких терміналів. Прямий вання потоку прийнятих символів з єдиного канал (FCH) несе FCH блоки даних протоколу демодулятора 354х і надає один потік відновлених (PDU) для низхідної лінії. FCH PDU 232а включає символів даних. Для багатоантенного користувапілот-сигнал 234а і пакет 236а даних, a FCH PDU льницького термінала 120у RX просторовий про232b включає тільки пакет 236b даних. У фазі вицесор 360у виконує просторову обробку Nut потоків східної лінії зворотний канал (RCH) несе RCH PDU прийнятих символів від Nut демодуляторів 354 з для висхідної лінії. RCH PDU 242а включає тільки матрицями Mut(k) просторової фільтрації, для k=1 пакет 246а даних, і RCH PDU 242b включає пілот... NF, і надає Nut потоків відновлених символів дасигнал 244b і пакет 246b даних. Канал довільного ˆ них. У будь-якому випадку кожний потік {sm} віддоступ у (R ACH) використовується користувальниновлених символів даних є оцінкою потоку {s m} цькими терміналами для одержання доступу до символів даних, переданих точкою 110х доступ у у системи і для відправки коротких повідомлень по даний користувальницький термінал 120. RX провисхідній лінії. RACH PDU 252, що передається по цесор 370 даних приймає і демультиплексує відRACH, включає пілот-сигнал 254 і повідомлення новлені символи даних у відповідні транспортні 256. канали. Потім відновлені символи даних для кож На Фіг.3 показана блок-схема у точці 110х доного транспортного каналу обробляють (наприступу і два користувальницькі термінали 120х і клад, виконують обернене відображення, оберне120у в ΜΙΜΟ системі 100. Точка 110х доступу є не перемежовування і декодування) для однією з точок доступ у за Фіг.1 і обладнана мноодержання декодованих даних для даного трансжиною (Nap) антен 324а-324ар. Користувальницьпортного каналу. Декодовані дані для кожного кий термінал 120х обладнаний однією антеною транспортного каналу можуть включати відновлені 352х, а користувальницький термінал 120у обладдані трафіку, керуючі дані і т.д., які можуть бути наний множиною (Nut) антен 352a-352ut. направлені у споживач 372 даних для збереження У випадку низхідної лінії у точці 110х доступ у і/або у контролер 380 для подальшої обробки. ТХ процесор 310 даних приймає дані трафіку для У кожному користувальницькому терміналі 120 одного або декількох користувальницьких терміпристрій 378 оцінки каналу оцінює відгук низхідноналів з джерела 308 даних, керуючі дані з контрого каналу і надає оцінки каналу, які можуть вклюлера 330 і, можливо, інші дані з планувальника чати оцінки посилення каналу, оцінки ССШ і т.д. 334. Різні типи даних можуть передаватися по різКонтролер 380 приймає оцінки каналу, виводить них транспортних каналах. ТХ процесор 310 даних вектори і/або коефіцієнти, використовувані при виконує обробку (наприклад, виконує кодування, просторовій обробці у передавальному і приймаперемежовування і відображення символів) різних льному ланцюгах, і визначає придатну швидкість типів даних, базуючись на одній або декількох для кожного потоку символів даних низхідної лінії. схемах кодування і модулювання для одержання Наприклад, контролер 380у у багатоантенному NS потоків символів даних. Як використовується у користувальницькому терміналі 120у може виводаному описі "символ даних" відноситься до симдити матриці Mut(k) просторової фільтрації для волу модулювання для даних, а "пілотний символ" низхідної лінії і матриці Fut(k) напрямних векторів відноситься до символу модулювання для пілотдля висхідної лінії, базуючись на матрицях Hdn(k) сигналу. ТХ просторовий процесор 320 приймає відгук у низхідного каналу, для k=1 ... NF. КонтроNS потоків символів даних від ТХ процесора 310 лер 380 також може приймати статус кожного паданих, виконує просторову обробку символів дакету/кадру, прийнятого по низхідній лінії, і компоних з матрицями Fap(k), Для k=1 ... N F, додатково нувати інформацію зворотного зв'язку для точки мультиплексує пілотні символи і надає Nap потоків 10х доступу. Ін формація зворотного зв'язку і дані символів передачі для Nap антен. Матриці Fap(k) висхідної лінії обробляються у ТХ процесорі 390 виводять відповідно до режиму просторового муданих, піддаються просторовій обробці у ТХ просльтиплексування, вибраного для використання. торовому процесорі 392 (якщо він наявний у кориОбробка у ТХ процесорі 310 даних і ТХ просторостувальницькому терміналі 120), додатково мульвому процесорі 320 описана нижче. типлексуються з пілотними символами, додатково Кожний модулятор (MOD) 322 приймає і оброобробляються в одному або декількох модулятобляє відповідний потік символів передачі для одерах 354 і передаються через одну або декілька ржання потоку OFD M символів, і виконує додаткоантен 352 у точку 110х доступу. ву обробку (наприклад, посилює, фільтрує і У точці 110х доступ у передані сигнали висхідпідвищує частоту) потоку OFD M символів для геної лінії приймаються антенами 324, демодулюнерації сигналу низхідної лінії. Nap модуляторів ються демодуляторами 322 і обробляються в RX 322а-322ар надають Nap сигналів низхідної лінії просторовому процесорі 340 і RX процесорі 342 для передачі через Nap антен 324а-324ар, відповіданих способом, компліментарним виконуваному у дно, у користувальницькі термінали. користувальницьких терміналах 120. Відновлена У кожному користувальницькому терміналі 120 інформація зворотного зв'язку надається у контроодна або декілька антен 352 приймають Nap сигналер 330 і планувальник 334. Планувальник 334 лів низхідної лінії, і кожна антена надає прийнятий може використовувати інформацію зворотного сигнал у відповідний демодулятор (DEMOD) 354. зв'язку для виконання функцій, таких як (1) плануКожний демодулятор 354 виконує обробку, компвання набору користувальницьких терміналів для ліментарну виконуваній модулятором 322, і надає передачі даних по низхідній лінії і висхідній лінії і потік прийнятих символів. Для одноантенного ко 27 83201 28 (2) призначення доступних ресурсів низхідної лінії і матрицю Fap(k) для одержання вектора xdn(k) певисхідної лінії запланованим терміналам. редачі. Матриця Fap(k) відповідає (1) матриці Vdn(k) Контролери 330 і 380 керують роботою різних правих власних векторів для Hdn(k) для однокорисблоків обробки у точці 110х доступ у і користувальтувальницького направленого режиму, (2) матриці ницькому терміналі 120, відповідно. Наприклад, Fmu(k) для багатокористувальницького направлеконтролер 380 може визначати найвищі швидкості, ного режиму або (3) одиничній матриці І для однопідтримувані просторовими каналами низхідної користувальницького ненаправленого режиму. лінії для користувальницького термінала 120. КонКожний мультиплексор 530 приймає NF підпотролер 330 може вибирати швидкість, розмір котоків символів передачі для його передавальної рисного навантаження і розмір OFDM символу для антени від NF просторових процесорів 520a-520f, кожного просторового каналу кожного заплановамультиплексує ці підпотоки і пілотні символи і наного користувальницького термінала. дає потік {xj} символів передачі для його передаОбробка у точці 110х доступ у і користувальнивальної антени. Пілотні символи можуть бути муцьких терміналах 120х і 120у для висхідної лінії льтиплексовані за частотою (тобто, у деякі може бути такою ж, як обробка для низхідної лінії, піддіапазони), за часом (тобто, у деякі періоди або відмінною від неї. Для простоти, нижче детасимволів) і/або у кодовому просторі (тобто, з ортольно описана обробка для низхідної лінії. гональними кодами). Nap мультиплексорів 530аНа Фіг.4 показана блок-схема варіанту здійс530ар надають Nap потоків {хj} символів передачі, нення ТХ процесора 310 даних у точці 110х достудля j=1 ... N ap , для Nap антен 324а-324ар. пу. Для цього варіанту здійснення ТХ процесор Для варіанту здійснення, показаного на Фіг.5, 310 даних включає один набір з кодера 412, канакожний модулятор 322 включає блок 542 обернельного перемежовувача 414 і блока 416 відобраного швидкого перетворення Фур'є (IFFT), генераження символів для кожного з NS потоків даних. тор 544 циклічного префікса і блок ТХ RF. Блок Для кожного потоку {dm} даних, де m=1 ... N S , кодер 542 IFFT і генератор 544 циклічного префікса 412 приймає і кодує потік даних, базуючись на утворюють OFD M модулятор. Кожний модулятор схемі кодування, вибраній для цього потоку, і на322 приймає відповідний потік {xj} символів передає кодовані біти. Схема кодування може включадачі з ТХ просторового процесора 320 і групує ти CRC кодування, згорткове кодування, турбококожний набір з NF символів передачі для NF піддідування, кодування з низькою щільністю перевірок апазонів. Блок 542 IFFT перетворює кожний набір на парність (LDPC), блокове кодування та інші NF символів передачі у часовий домен, використовиди кодування або їх комбінації. Канальний певуючи NF точкове обернене швидке перетворення ремежовувач 414 виконує перемежовування (тобФур'є, і надає відповідний перетворений символ, то, змінює порядок проходження) кодованих бітів, який містить NF елементарних сигналів. Генератор базуючись на схемі перемежовування. Блок 416 544 циклічного префікса повторює частину кожновідображення символів відображає піддані перего перетвореного символу для одержання відповімежовуванню біти, базуючись на схемі модулюдного OFDM символу, який містить NF+Ncp елемевання, вибраній для цього потоку, і надає потік {s m} нтарних сигналів. Повторювана частина (тобто символів даних. Блок 416 групує кожний набір з В циклічний префікс) гарантує, що OFDM символ підданих перемежовуванню бітів для формування збереже свої ортогональні властивості у присутності багатопроменевого розкиду затримок, викликаВ-бітного двійкового значення, де В³1, і далі відоного частотно-селективним завмиранням. Блок бражає кожне В-бітне двійкове значення на визна546 ТХ RF приймає і додатково обробляє потік чений символ даних, базуючись на вибраній схемі модулювання (наприклад, QPSK, M-PSK або MOFDM символів з генератора 544 для генерації модульованого сигналу низхідної лінії. Nap модуQAM, де М=2В). Кодування і модулювання для льованих сигналів низхідної лінії передають через кожного потоку даних виконують відповідно до Nap антен 354а-354ар, відповідно. сигналів керування кодуванням і модулюванням, На Фіг.6 показана блок-схема варіанту здійсщо надаються контролером 330. На Фіг.5 показана блок-схема варіанту здійснення демодуляторів 354a-354ut і RX просторового процесора 360у для багатоантенного користунення ТХ просторового процесора 320 і модулятовальницького термінала 120у. У рів 322а-322ар у точці 110х доступ у. Для цього користувальницькому терміналі 120у Nut антен варіанту здійснення ТХ просторовий процесор 320 354a-354ut приймають Nap модульованих сигналів, включає NS демультиплексорів (Demux) 510a510s, NF ТХ просторових процесорів 520a-520f переданих точкою 110х доступу, і надають Nut прийнятих сигналів в Nut демодуляторів 354aпіддіапазонів і Nap мультиплексорів (MUX) 530а354ut, відповідно. Кожний демодулятор 354 вклю530ар. Кожний демультиплексор 510 приймає відчає блок 612 RX RF, блок 614 видалення циклічноповідний потік {s m} символів даних від ТХ простого префікса і блок 616 швидкого перетворення рового процесора 320, демультиплексує потік на NF підпотоків символів даних для NF піддіапазонів і Фур'є (FFT). Блоки 614 і 616 утворюють OFDM демодулятор. У кожному демодуляторі 354 блок 612 надає NF підпотоків в NF просторових процесорів RX RF приймає, обробляє і цифрує відповідний 520a-520f. Кожний просторовий процесор 520 приприйнятий сигнал і надає потік елементарних сигймає NS підпотоків символів даних для його піддіаналів. Блок 614 видалення циклічного префікса пазону від NS демультиплексорів 510а-510s, виконує просторову обробку у передавачі для цих видаляє циклічний префікс у кожному прийнятому OFDM символі для одержання прийнятого перепідпотоків і надає Nap підпотоків символів передачі твореного символу. Потім блок 616 FFT перетводля Nap антен у точці доступу. Кожний просторорює кожний прийнятий перетворений символ у вий процесор 520 множить вектор s dn(k) даних на 29 83201 30 частотний домен за допомогою NF точкового цього потоку у точці 110х доступу. Потім декодер швидкого перетворення Фур'є для одержання NF 716 декодує піддані оберненому перемежовуванприйнятих символів для NF піддіапазонів. Блок 616 ню дані способом, компліментарним кодуванню, FFT надає потік прийнятих символів в RX простощо виконується для цього потоку у точці 110х доровий процесор 360у і потік прийнятих пілотних ступу. Наприклад, як декодер 716 можуть викориссимволів у пристрій 378у оцінки каналу. товуватися турбодекодер або декодер Вітербі, Для варіанту здійснення, показаного на Фіг.6, якщо у точці 110х доступ у виконується турбокодуRX просторовий процесор 360у включає Nut девання або згорткове кодування, відповідно. Декомультиплексорів 630a-630ut для Nut антен у корисдер 716 надає декодований пакет для кожного тувальницькому терміналі 120у, NF RX просторопакету прийнятих даних. Декодер 716 додатково вих процесорів 640a-640f піддіапазонів і NF виконує перевірку кожного декодованого пакету пристроїв 642a-642f масштабування для NF піддіадля визначення, був пакет декодований вірно або пазонів, і Ns мультиплексорів 650a-650s для NS з помилкою, і надає статус декодованого пакету. потоків даних. RX просторовий процесор 360у Демодулювання і декодування для кожного потоку одержує Nut потоків {ri} прийнятих символів, для і=1 відновлених символів даних виконують відповідно ... Nut, з демодуляторів 354a-354ut. Кожний дедо сигналів керування демодулюванням і декодумультиплексор 630 приймає відповідний потік {ri} ванням, що надаються контролером 380у. прийнятих символів, демультиплексує потік на NF На Фіг.8 показана блок-схема RX просторового підпотоків прийнятих символів для NF піддіапазопроцесора 360z і RX процесора 370z даних, які нів і надає NF підпотоків в NF просторових процереалізовують спосіб SIC. RX просторовий процесорів 640a-640f. Кожний просторовий процесор сор 360z і RX процесор 370z даних реалізовують 640 одержує Nut підпотоків прийнятих символів для NS послідовних (тобто, каскадованих) етапів (касйого піддіапазону з Nut демультиплексорів 630aкадів) обробки у приймачі для Ns потоків символів 630ut, виконує просторову обробку у приймачі для даних. Кожний з етапів (каскадів) з 1 по NS-1 вклюцих підпотоків і надає NS підпотоків детектованих чає в себе просторовий процесор 810, пристрій символів для його піддіапазону. Кожний просторо820 видалення перешкоди, RX процесор 830 потовий процесор 640 множить прийнятий вектор rdn(k) ку даних і ТХ процесор 840 потоку даних. Останній етап включає тільки просторовий процесор 810s і на матрицю Mnt(k) для одержання вектора ~dn (k ) s RX процесор 830s потоку даних. Кожний RX 830 детектованих символів. Матриця Mut(k) відповідає потоку даних включає блок 712 оберненого відоH (1) матриці U dn(k) лівих власних векторів для браження символів, обернений перемежовувач Hdn(k) У випадку однокористувальницького напра714 каналу і декодер 716, як показано на Фіг.7. вленого режиму або (2) матриці Mccmi(k), Mmmse(k) Кожний ТХ процесор 840 потоку даних включає або якій-небудь іншій матриці у випадку однокорикодер 412, перемежовувач 414 каналу і блок 416 стувальницького ненаправленого режиму. відображення символів, як показано на Фіг.4. Кожний блок 642 масштабування приймає NS На етапі 1 просторовий процесор 810а виконує підпотоків детектованих символів для свого піддіпросторову обробку у приймачі Nut потоків прийняапазону, масштабує ці підпотоки і надає NS підпоˆ тих символів і надає один потік s j1 відновлених токів відновлених символів даних для свого піддіапазону. Кожний блок 642 масштабування виконує символів даних, де підрядковий індекс j1 позначає антену у точці доступ у, використовуван у для пемасштабування сигналу для вектора ~ dn (k ) детеs редачі потоку {s j1} символів даних. RX процесор ктованих символів за допомогою діагональної ма830а потоку даних виконує демодулювання, обер-1 ˆ триці D ut(k) і надає вектор s dn (k ) відновлених ˆ нене перемежовування і декодування потоку s j1 символів даних. Кожний мультиплексор 650 привідновлених символів даних і надає відповідний ймає і мультиплексує NF підпотоків відновлених ˆ символів даних для його потоку даних з NF блоків потік d j1 декодованих даних. ТХ процесор 840а 642а-642f масштабування і надає потік відновлепотоку даних виконує кодування, перемежовуванних символів даних. NS мультиплексорів 650a-650s ˆ ня і модулювання потоку d j1 декодованих даних ˆ надають NS потоків {sm } відновлених символів тим же способом, який виконується у точці 110х даних, для m=1 ... N S. ( На Фіг.7 показана блок-схема варіанту здійсдоступ у для цього потоку і надає s j1 повторно нення RX процесора 370у даних у користувальнимодульованих символів. Пристрій 820а видалення цькому терміналі 120у. RX процесор 370у даних перешкоди виконує просторову обробку потоку включає один набір з блоку 712 оберненого відо( s j1 повторно модульованих символів тим же браження символів, оберненого перемежовувача 714 каналу і декодера 716 для кожного з Ns потоків способом (якщо він виконується), який виконується ˆ у точці 110х доступ у і додатково обробляє резульданих. Для кожного потоку {sm } відновлених симтат за допомогою матриці Hdn(k) відгук у каналу для волів даних, де m=1 ... NS, блок 712 оберненого одержання Nut компонентів перешкоди, пов'язаної відображення символів виконує демодулювання з потоком {sj1} символів. Nut компонентів перешковідновлених символів даних відповідно до схеми ди віднімають з Nut потоків прийнятих символів для модулювання, використовуваної для цього потоку, одержання Nut потоків модифікованих символів, які і надає демодульовані дані. Обернений переменадаються на етап 2. жовувач 714 каналу виконує обернене перемежоКожний з етапів з 2 по N S-1 виконує ту ж саму вування демодульованих даних способом, компліобробку, що і етап 1, за винятком того, що одерментарним перемежовуванню, виконуваному для { } { } { } { } { } { } 31 83201 32 жують Nut потоків модифікованих символів з попетовувалися у точці 11 Ох доступу для Nap антен, реднього етапу замість Nut потоків прийнятих симдля одержання оцінок комплексного посилення волів. Останній етап виконує просторову обробку і каналу між антеною і користувальницького термідекодування Nut потоків модифікованих символів з нала і кожною з Nap антен у точці доступу. Зняття етапу NS-1 і не виконує оцінки і видалення перепокриття є компліментарним до покриття і являє шкоди. собою процес, за допомогою якого прийняті (пілоПросторові процесори 810а-810s кожний мотні) символи множать на L елементарних сигналів жуть реалізовувати способи ССМІ, MMSE або L-сигнальної ортогональної послідовності для який-небудь інший спосіб обробки у приймачі. Коодержання L символів зі знятим покриттям, які жний просторовий процесор 810 множить вектор потім підсумовують для одержання оцінки передаrldn(k) вхідних (прийнятих або модифікованих) симного (пілотного) символу. Пристрій 378 оцінки каволів на матрицю Mlut(k) для одержання вектора налу виконує таку ж обробку пілот-сигналу для ~ (k ) детектованих символів, вибирає і масштакожного піддіапазону, використовуваного для пеs dn редачі пілот-сигналу. Якщо пілотні символи перебує один з потоків детектованих символів, і надає дають тільки у підмножині NF піддіапазонів, то потік масштабованих символів як потік відновлепристрій 378 оцінки каналу може виконати інтерних символів даних для цього етапу. Матрицю поляцію оцінок відгуку каналу для піддіапазонів з l M ut(k) виводять, базуючись на редукованій матриці передачею пілот-сигналу для одержання оцінок l H ut(k) відгуку каналу для цього етапу. відгук у каналу для піддіапазонів без передачі піБлоки обробки у точці 110х доступу і користулот-сигналу. Для одноантенного користувальницьвальницькому терміналі 120у для висхідної лінії кого термінала 120х пристрій 378х оцінки каналу можуть бути реалізовані, як описано вище для ˆ надає вектори hdn (k) оцінок відгуків низхідного низхідної лінії. ТХ процесор 390у даних і ТХ просторовий процесор 392у можуть бути реалізовані у каналу, для k=1 ... NF, для однієї антени 352. Для вигляді ТХ процесора 310 даних за Фіг.4 і ТХ просбагатоантенного користувальницького термінала торового процесора 320 за Фіг.5, відповідно. RX 120у пристрій 378у оцінки каналу виконує таку ж просторовий процесор 340 може бути реалізоваобробку пілот-сигналу для всіх Nut антен 352aний у вигляді RX просторового процесора 360у ˆ 352ut і надає матриці Нdn (k ) оцінок відгуків низабо 360z, і RX процесор 342 даних може бути реахідного каналу, для k=1 ... NF. Кожний користувалізований у вигляді процесора 370у або 370z. Для одноантенного користувальницького терльницький термінал 120 також може оцінювати мінала 120х RX просторовий процесор ЗбОх викодисперсію шуму для низхідної лінії, базуючись на прийнятих пілотних символах, і надає оцінку шуму нує когерентне демодулювання одного потоку прийнятих символів з оцінками каналу для одерˆ низхідної лінії, s 2 dn . жання потоку відновлених символів даних. У випадку висхідної лінії багатоантенний кориА, Оцінка каналу стувальницький термінал 120у може передавати Відгук каналу для низхідної лінії і висхідної ліΜΙΜΟ пілот-сигнал, який може бути використаний нії може бути оцінений різними способами, наприу точці 110х доступ у для оцінки відгуку tlup(k) виклад за допомогою ΜΙΜΟ пілот-сигналу або насхідного каналу для користувальницького термінаправленого пілот-сигналу. Для TDD ΜΙΜΟ системи ла 120у. Одноантенний користувальницький тердля спрощення оцінки каналу можуть використомінал 120х може передавати пілот-сигнал через вуватися визначені способи. свою єдину антену. Множина одноантенних корисУ випадку низхідної лінії точка 110х доступ у тувальницьких терміналів 120 може передавати може передавати ΜΙΜΟ пілот-сигнал користувальортогональні пілот-сигнали одночасно по висхідній ницьким терміналам 120. ΜΙΜΟ пілот-сигнал міслінії, причому ортогональність може досягатися за тить Nap передач пілот-сигналу від Nap антен точок часом і/або частотою. Часова ортогональність модоступ у, причому передача пілот-сигналу через же бути одержана за допомогою покриття кожним кожну антену "покрита" різними ортогональними користувальницьким терміналом свого пілотпослідовностями (наприклад, послідовностями сигналу висхідної лінії різними ортогональними Уолша). Покриття являє собою процес, за допомопослідовностями, пов'язаними з даним користувагою якого даний символ модулювання (або набір з льницьким терміналом. Частотна ортогональність L символів модулювання з однаковим значенням), може бути одержана при передачі кожним кориспризначений для передачі, множать на L елементувальницьким терміналом свого пілот-сигналу тарних сигналів L-сигнальної ортогональної послівисхідної лінії у різному наборі піддіапазонів. Оддовності для одержання L покритих символів, які ночасні передачі пілот-сигналів по висхідній лінії потім передаються. При покритті досягається орвід множини користувальницьких терміналів повитогональність для Nap передач пілот-сигналу, віднні бути приблизно вирівняні за часом у точці 110х правлених через Nap антен точки доступу, що додоступ у (наприклад, вирівняні за часом у межах зволяє користувальницьким терміналам циклічного префікса). розрізняти передачу пілот-сигналу від кожної анДля TDD MIMO системи звичайно присутній тени. високий ступінь кореляції між відгуками каналу для У кожному користувальницькому терміналі 120 низхідної лінії і висхідної лінії, оскільки ці лінії спіпристрій 378 оцінки каналу "знімає покриття" прильно використовують один і той же діапазон часйнятих пілотних символів для кожної антени і котот. Проте, відгуки передавальних/приймальних ристувальницького термінала за допомогою таких ланцюгів у точці доступ у, як правило, не співпадаже Nap ортогональних послідовностей, які викорисють з відгуками передавальних/приймальних лан 33 83201 34 цюгів у користувальницькому терміналі. Якщо вкаРозкладання по сингулярних значеннях матзану відмінність визначають і враховують за допориць відгуків висхідного і низхідного каналів, могою калібрування, то загальні відгуки низхідної Hcdn(k) і Hcup(k), для кожного піддіапазону може лінії і висхідної лінії можуть розглядатися як взаєбути виражене як: мообернені (тобто транспоновані) по відношенню один до одного. Hcup (k ) = Uup (k )S(k )V H (k ) i На Фіг.9 показані приймальні/передавальні ut рівняння (36) ланцюги у точці 110х доступ у і користувальниць* (k )S (k )UH (k ) Hcdn (k ) = V ut ap кому терміналі 120у. У точці 110х доступ у передавальний тракт моделюється NapxNap матрицею Тар(k), і приймальний тракт моделюється NapxNap Як показано у системі рівнянь (37) матриці матрицею Rap(k). У користувальницькому терміналі V*ut(k) і U*ap(k) лі вих і правих власних векторів для 120у приймальний тракт моделюється NutxNut матHcdn(k) є комплексно спряженими матрицями Vut(k) рицею Rut(k), і передавальний тракт моделюється і Uap(k) правих і лівих власних векторів Hcup(k). МаNutxNut матрицею Tut(k). Вектор прийнятих символів триця Uap(k) може бути використана у точці 110х для низхідної лінії і висхідної лінії для кожного піддоступ у для просторової обробки, як при передачі, діапазону може бути виражений як: так і при прийомі. Матриця Vut(k) може бути використана у користувальницькому терміналі 120у для просторової обробки, як при передачі, так і r dn (k ) = Rut (k )H(k )T ap (k )x dn (k ) i при прийомі. рівняння (33) Внаслідок взаємооберненої природи ΜΙΜΟ каr up (k ) = R ap (k )H T (k )T ut (k )xup (k) налу для TDD MIMO системи і після виконання калібрування для врахування відмінностей у переде "Т" означає транспонування. У рівнянні (34) давальних/приймальних ланцюгах, розкладання припускається, що низхідна лінія і висхідна лінія є по сингулярних значеннях повинне бути виконане транспонованими по відношенню одна до одної. тільки або у користувальницькому терміналі 120у, "Ефективні" відгуки низхідного і висхідного каналів, або у точці 110х доступ у. У випадку виконання у Нedn(k) і Heup(k) для кожного піддіапазону включакористувальницькому терміналі 120у матриці ють в себе відгуки передавального і приймального Vut(k), для k=1 ... N F, використовуються для просланцюгів і можуть бути виражені як: торової обробки у користувальницькому терміналі, а матриця Uap(k), для k=1 ... NF, може бути надана Hedn(k)=Rut(k)H(k)T ap(k)i у точку доступу, або безпосередньо (тобто шляхом T рівняння (34) Heup(k)=Rap(k)H (k)Tut(k) передачі елементів матриці Uap(k)), або опосередковано (наприклад, за допомогою направленого Ефективні відгуки низхідного і висхідного капілот-сигналу). Реально користувальницький терналів не є взаємооберненими по відношенню один ˆ мінал 120у може одержати тільки і Hcdn (k ) , що є до одного (тобто Hedn(k) Нeup(k)), якщо відгуки передавальних/приймальних ланцюгів низхідної лінії ˆ ˆ оцінкою Hcdn(k), і може вивести тільки V ut (k ) , S (k ) і висхідної лінії не дорівнюють один одному. Точка 110х доступу і користувальницький терˆ і Uap (k) , які являють собою оцінки Vut(k), E(k) і мінал 120у можуть виконати калібрування для Uap(k), відповідно. Для простоти у наведеному І одержання поправкових матриць Kар(k) і Kut(k) для нижче описі робиться припущення, що оцінка какожного піддіапазону, які можуть бути виражені як: налу виконана без помилок. Направлений пілот-сигнал висхідної лінії, що K ap (k ) = T -1 (k )R ap (k ) i передається користувальницьким терміналом ap рівняння (35) 120у може бути виражений як: K ut (k ) = T -1 (k )R ut (k) ut хup,m(k)=Kut(k)vut,m(k)p(k) рівняння (38) Поправкові матриці можуть бути одержані за де vup,m(k) являє собою m-й стовпець Vut(k), і допомогою передачі ΜΙΜΟ пілот-сигналів як по р(к) являє собою пілотний символ. Прийнятий нанизхідній лінії, так і по висхідній лінії, і виведення правлений пілот-сигнал висхідної лінії у точці 110х поправкових матриць, використовуючи критерій доступ у може бути виражений як: MMSE або які-небудь інші способи. Поправкові матриці Kар(k) і Kut(k) використовують у точці 110х рівняння (39) rup,m(k)=uap,m(k)smp(k)+nup(k) доступ у і користувальницькому терміналі 120у, відповідно, як показано на Фіг.9. Відгуки "каліброЗ рівняння (39) випливає, що точка 110х дованих" низхідного і висхідного каналів, Hcdn(k) і ступу може одержати матрицю Uap(k), один вектор Hcup(k), при цьому є взаємооберненими по відноодноразово, базуючись на направленому пілотшенню один до одного і можуть бути виражені як: сигналі висхідної лінії від користувальницького термінала 120у. Hcup (k ) = Hup (k )K ut (k) = Також може бути виконаний компліментарний рівняння (36) T = HT (k) процес, при якому користувальницький термінал = Hdn (k )K ap (k ) cdn 120у передає ΜΙΜΟ пілот-сигнал по висхідній лінії, а точка 110х доступу виконує розкладання по син ( ) 35 83201 36 гулярних значеннях і передає направлений пілотробку при прийомі для низхідної лінії і можуть бути сигнал по низхідній лінії. Оцінки каналу для низреалізовані в RX просторовому процесорі 640 підхідної лінії і висхідної лінії також можуть бути викодіапазону за Фіг.6. нані іншими способами. У випадку висхідної лінії у ТХ просторовому У кожному користувальницькому терміналі 120 процесорі 392у у користувальницькому терміналі пристрій 378 оцінки каналу може виконати оцінку 120у вектор s up(k) даних спочатку множать на матвідгук у низхідного каналу (наприклад, базуючись рицю Fut(k) у блоці 960 і далі множать на поправна ΜΙΜΟ пілот-сигналі або направленому пілоткову матрицю Kut(k) у блоці 962 для одержання сигналі, що передається точкою 110х доступ у) і вектора xup(k) передачі. Вектор xup(k) обробляється надати оцінки низхідного каналу у контролер 380. у передавальному ланцюзі 964 у модуляторах 354 Для одноантенного користувальницького термінаі передається по ΜΙΜΟ каналу у точку 110х достула 120х контролер 380х може вивести комплексні пу. Блоки 960 і 962 виконують просторову обробку посилення каналу, використовувані для когерентпри передачі для висхідної лінії. ного демодулювання. Для багатоантенного корисУ точці 110х доступу сигнали висхідної лінії тувальницького термінала 120у контролер 380у обробляються приймальним ланцюгом 924 у деможе вивести матрицю Mut(k), використовувану модуляторах 322 для одержання прийнятого векдля просторової обробки при прийомі, і матрицю тора rup(k). У R X просторовому процесорі 340 приFut(k), використовувану для просторової обробки йнятий вектор rup(k) спочатку множать на матрицю при передачі, базуючись на оцінках низхідного Мар(k) у блоці 926 і потім масштабують за допомоканалу. У точці 110х доступ у пристрій 328 оцінки гою оберненої діагональної матриці D-1ut(k) у блоці каналу може виконати оцінку відгук у висхідного ˆ 928 для одержання вектора s up (k ) , який являє каналу (наприклад, базуючись на направленому собою оцінку вектора s up(k) даних. Блоки 926 і 928 пілот-сигналі або ΜΙΜΟ пілот-сигналі, що передавиконують просторову обробку при прийомі для ється користувальницьким терміналом 120) і надависхідної лінії. ти оцінки висхідного каналу у контролер 380. КонВ. Просторова обробка для TDD ΜΙΜΟ систетролер 380 може вивести матрицю Fap(k), ми використовуван у для просторової обробки при У таблиці 3 зведені ілюстративні варіанти пепередачі, і матрицю Мар(k), використовуван у для редачі пілот-сигналу і просторової обробки, що просторової обробки при прийомі, базуючись на виконується у точці доступ у і користувальницьких оцінках висхідного каналу. терміналах при передачі даних по низхідній лінії і На Фіг.10 показана просторова обробка у точці висхідній лінії для різних режимів просторового 110х доступ у і користувальницькому терміналі мультиплексування у TDD MIMO системі. Для од120у для низхідної лінії і висхідної лінії для одного нокористувальницького направленого режиму точпіддіапазону k. У випадку низхідної лінії у ТХ проска доступу передає ΜΙΜΟ пілот-сигнал, даючи торовому процесорі 320 у точці 110х доступу векможливість користувальницькому терміналу оцінитор s dn(k) даних спочатку множать на матрицю ти відгук низхідного каналу. Користувальницький FaP(k) у блоці 910 і далі множать на поправкову термінал передає направлений пілот-сигнал, даюматрицю Kар(k) у блоці 912 для одержання вектора чи можливість точці доступу оцінити відгук висхідxdn(k) передачі. Вектор xdn(k) обробляється переного каналу. Точка доступу виконує просторову давальним ланцюгом 914 у модуляторах 322 і пеобробку при передачі і прийомі за допомогою редається по ΜΙΜΟ каналу у користувальницький Uap(k). Користувальницький термінал виконує протермінал 120у. Блоки 910 і 912 виконують простосторову обробку при передачі і прийомі за допоморову обробку при передачі для низхідної лінії і могою Vut(k). жуть бути реалізовані у ТХ просторовому процеДля однокористувальницького ненаправленосорі 520 піддіапазону за Фіг.5. го режиму для передачі даних по низхідній лінії У користувальницькому терміналі 120у сигнаточка доступу передає ΜΙΜΟ пілот-сигнал через ли низхідної лінії обробляються приймальним лавсі антени і потік символів даних через кожну аннцюгом 954 у демодуляторах 354 для одержання тену. Користувальницький термінал оцінює відгук прийнятого вектора rdn(k). В RX просторовому пронизхідного каналу за допомогою ΜΙΜΟ пілотцесорі 360у прийнятий вектор rdn(k) спочатку мносигналу і виконує просторову обробку при прийомі, жать на матрицю Mut(k) у блоці 956 і потім масшвикористовуючи оцінки низхідного каналу. Для табують за допомогою оберненої діагональної -1 передачі даних по висхідній лінії виконується комматриці D ut(k) у блоці 958 для одержання вектора пліментарна обробка. ˆ s dn (k ) , який являє собою оцінку вектора s dn(k) даних. Блоки 956 і 958 виконують просторову об 37 83201 Для багатокористувальницького направленого режиму для передачі даних по низхідній лінії в одноантенні і/або багатоантенні користувальницькі термінали, користувальницькі термінали передають ортогональні пілот-сигнали по висхідній лінії, даючи можливість точці доступу оцінити відгук низхідного каналу. Одноантенний користувальницький термінал передає ненаправлений пілотсигнал, а багатоантенний користувальницький термінал передає направлений пілот-сигнал. Точка доступу виводить напрямні вектори низхідної лінії, базуючись на ортогональних пілот-сигналах висхідної лінії, і використовує напрямні вектори для передачі направлених пілот-сигналів і направлених потоків символів даних у вибрані користувальницькі термінали. Кожний користувальницький термінал використовує направлений пілот-сигнал для прийому направленого потоку символів даних, переданого у даний користувальницький термінал. Для передачі даних по висхідній лінії від багатоантенних користувальницьких терміналів точка доступу передає ΜΙΜΟ пілот-сигнал. Кожний багатоантенний користувальницький термінал передає направлений пілот-сигнал і направлений потік символів даних по висхідній лінії. Точка доступу виконує просторову обробку у приймачі (наприклад, ССМІ, MMSE і т.д.) для відновлення потоків символів даних. 38 Для багатокористувальницького ненаправленого режиму для передачі даних по низхідній лінії у багатоантенні користувальницькі термінали точка доступу передає ΜΙΜΟ пілот-сигнал по низхідній лінії. Кожний користувальницький термінал визначає і надсилає назад швидкість, з якою він може вести прийом від кожної антени у точці доступу. Точка доступу вибирає набір користувальницьких терміналів і передає потоки символів даних для вибраних користувальницьких терміналів через антени точки доступу. Кожний багатоантенний користувальницький термінал виконує просторову обробку у приймачі (наприклад, ССМІ, MMSE і т.д.) для відновлення свого потоку символів даних. Для передачі даних по висхідній лінії від одноантенних і/або багатоантенних користувальницьких терміналів користувальницькі термінали передають ортогональні (ненаправлені) пілот сигнали по висхідній лінії. Точка доступу оцінює відгук висхідного каналу, базуючись на пілот-сигналах висхідної лінії, і вибирає набір сумісних користувальницьких терміналів. Кожний вибраний користувальницький термінал передає потік символів даних через антену користувальницького термінала. Точка доступу виконує просторову обробку у приймачі (наприклад, ССМІ, MMSE і т.д.) для відновлення потоків символів даних. С. Вибір швидкості 39 83201 40 Кожний потік даних для низхідної лінії і висхідD. Керування швидкістю із замкнутим контуром ної лінії передають по широкосмуговому простокерування ровому каналу т, використовуючи один з режимів Керування швидкістю із замкнутим контуром просторового мультиплексування. Кожний потік керування може бути використане для кожного даних також передають на швидкості, яку вибирапотоку даних, що передається по множині широкоють таким чином, що для даного потоку може бути смугових просторових каналів. Керування швидкісдосягнутий цільовий рівень продуктивності (напритю із замкнутим контуром керування може бути клад, 1 процент пакетних помилок (PER)). Швидвиконане за допомогою одного або множини конкість для кожного потоку даних може бути визнатурів. чена, базуючись на ССШ, що досягається у На Фіг.10 показана блок-схема варіанту здійсприймачі для цього потоку (тобто, ССШ при принення механізму 1000 керування швидкістю із зайомі), де ССШ залежить від просторової обробки, мкнутим контуром керування, який містить внутріщо виконується у передавачі і приймачі, як описашній контур 1010, який працює сумісно із но вище. зовнішнім контуром 1020. Внутрішній контур 1010 В ілюстративній схемі вибору швидкості для виконує оцінку стану каналу і визначає швидкість, визначення швидкості для широкосмугового проспідтримувану кожним широкосмуговим простороторового каналу m, спочатку одержують оцінку вим каналом. Зовнішній контур 1020 виконує оцінку якості передачі даних, прийнятих по кожному ССШ, gm(k), (наприклад, в одиницях дБ) для кожноширокосмуговому просторовому каналу, і відповіго піддіапазону k широкосмугового просторового дно настроює роботу внутрішнього контур у. Для каналу, як описано вище. Потім обчислюють серепростоти, робота контурів 1010 і 1020 показана на днє ССШ, gavg , для широкосмугового просторового Фіг.10 і описана нижче для одного низхідного шиканалу m наступним чином: рокосмугового просторового каналу т. Для внутрішнього контуру 1010 пристрій 378 N 1 F оцінки каналу у користувальницькому терміналі рівняння (40) gavg, m = gm (k ) å NF 120 виконує оцінку широкосмугового просторового k =l каналу m і надає оцінки каналу (наприклад, оцінки посилення каналу і оцінку дисперсії шум у). ПриДисперсію оцінок ССШ, s2g m, також обчислюстрій 1030 вибору швидкості у контролері 380 виють наступним чином: значає швидкість, підтримувану широкосмуговим просторовим каналом т, базуючись на (1) оцінках NF каналу з пристрою 378 оцінки каналу, (2) факторі 1 2 2 рівняння (41) s = g (k ) - gavg ,m запасу ССШ і/або настройці швидкості для широgm N - 1 å m F k =l космугового просторового каналу m з пристрою ( ) Фактор запасу для ССШ, gbo,m, визначають, базуючись на функції F(gavg,m,s2g m) середнього ССШ і дисперсії ССШ. Наприклад, може бути використана функція F(gavg,m,s2 gm)=K b·s2g m, де Kb є масштабуючим фактором, який може бути вибраний, базуючись на одній або декількох характеристиках ΜΙΜΟ системи, таких як перемежовування, розмір пакету і/або схема кодування, використовувані для даного потоку даних. Фактор запасу ССШ враховує зміни ССШ у широкосмуговому просторовому каналі. Потім обчислюють робоче ССШ, gbo,m, для широкосмугового каналу m наступним чином: gop,m=gavg,m-g bo,m рівняння (42) Потім, базуючись на робочому ССШ, визначають швидкість для даного потоку даних. Наприклад, у таблиці перегляду (LUT) може зберігатися набір швидкостей, що підтримуються ΜΙΜΟ системою, і необхідні для них ССШ. Необхідне ССШ для кожної швидкості може бути визначене за допомогою комп'ютерного моделювання, емпіричних вимірювань і т.д., і базується на припущенні того, що канал є каналом AWGN. Найвищу швидкість у таблиці перегляду з необхідним ССШ, який дорівнює або менше робочого ССШ, вибирають як швидкість для потоку даних, який передається по широкосмуговому просторовому каналу m. Також можуть бути використані інші схеми вибору швидкості. 1032 оцінки якості і (3) таблиці перегляду (LUT) 1036 швидкостей, підтримуваних ΜΙΜΟ системою, і ССШ, необхідних для них. Підтримувані швидкості для широкосмугового просторового каналу m відправляються контролером 380 у точку 110 доступу. У точці 110 доступу контролер 330 приймає підтримувану швидкість для широкосмугового просторового каналу m і визначає сигнали керування швидкістю передачі даних, кодуванням і модулюванням для потоку даних, призначеного для передачі по цьому просторовому каналу. Потім потік даних обробляють відповідно до цих сигналів керування у ТХ процесорі 310 даних, піддають просторовій обробці і мультиплексують з пілотними символами у ТХ просторовому процесорі 320, обробляють у модуляторі 322 і передають у користувальницький термінал 120. Зовнішній контур 1020 виконує оцінку якості потоку декодованих даних, прийнятих по широкосмуговому просторовому каналу m, і настроює роботу вн утрішнього контуру 1010. Прийняті символи для широкосмугового просторового каналу m піддаються просторовій обробці в RX просторовому процесорі 360 і далі обробляються RX процесором 370 даних. RX процесор 370 даних надає статус кожного пакету, прийнятого по широкосмуговому просторовому каналу m і/або метрику декодера у пристрій 1032 оцінки якості. Зовнішній контур 1020 може забезпечувати різні типи інформації (наприклад, фактор запасу ССШ, настройка швидкості і т.д.), використовувані для керування роботою внутрішнього контур у 1010. 41 83201 42 Керування швидкістю замкнутим контуром кеСелектор 1130 режиму вибирає конкретний рування, описане вище, може таким чином викорежим просторового мультиплексування для винуватися незалежно для кожного низхідного і використання для кожного набору користувальницьсхідного широкосмугового просторового каналу, ких терміналів, виходячи з робочого стану і можякий може відповідати (1) широкосмуговій власній ливостей користувальницьких терміналів у наборі моді для однокористувальницького направленого і, можливо, інших факторів. Наприклад, однокорирежиму або (2) передавальній антені для однокостувальницький направлений режим може бути ристувальницького і багатокористувальницького використаний для "каліброваного" багатоантенноненаправлених режимів. го користувальницького термінала, який виконав Е. Планування користувальницьких терміналів калібрування таким чином, що відгук каналу для На Фіг.11 показана блок-схема варіанту здійсоднієї лінії (наприклад, низхідної лінії) може бути нення контролера 330 і планувальника 334 для оцінений, базуючись на (наприклад, направленопланування користувальницьких терміналів для му) пілот-сигналі одержаному по іншій лінії (наприпередачі даних по низхідній лінії і висхідній лінії. У клад, висхідній лінії). Однокористувальницький контролері 330 процесор 1110 запитів одержує ненаправлений режим може бути використаний запити на доступ, що передаються користувальдля "некаліброваного" багатоантенного користуницьким терміналом 120 по RACH, і, можливо, вальницького термінала, який не виконав калібрузапити на доступ від інших джерел. Такі запити на вання або не може підтримувати однокористувадоступ призначені для передачі даних по низхідній льницький направлений режим з якої-небудь лінії і/або висхідній лінії. Процесор 1110 запиту причини. Багатокористувальницький направлений обробляє одержані запити на доступ і надає іденрежим може бути використаний для передачі по тифікатори (ID) і статуси всіх запитуючих користунизхідній лінії у множину користувальницьких тервальницьких терміналів. Статус для користувальміналів, кожний з яких обладнаний однією або деницького термінала може вказувати кількість антен кількома антенами. Багатокористувальницький доступних у даному терміналі, чи відкалібрований ненаправлений режим може бути використаний даний термінал, і т.д. для передачі по висхідній лінії множиною користуСелектор 1120 швидкості приймає оцінки кавальницьких терміналів. налів від пристрою оцінки каналів 328 і визначає Планувальник 334 приймає набори користувашвидкості, підтримувані широкосмуговими простольницьких терміналів з селектора 1140 користуваровими каналами висхідної лінії і/або низхідної ча, вибраний режим просторового мультиплексулінії для запитуючих користувальницьких термінавання для кожного набору користувальницьких лів, як описано вище. Для низхідної лінії кожний терміналів з селектора 1130 режиму і вибрані користувальницький термінал 120 може визначити швидкості для кожного набору користувальницьких швидкість, підтримувану кожним його широкосмутерміналів з селектора 1120 швидкості. Плануваговим просторовим каналом, як описано вище. льник 334 планує користувальницькі термінали Підтримувана швидкість є максимальною швидкісдля передачі даних по низхідній лінії і/або висхідтю, яка може бути використана для передачі даних ній лінії. Планувальник 334 вибирає один або декіпо широкосмуговому просторовому каналу для лька наборів користувальницьких терміналів для досягнення цільового рівня виконання. Кожний передачі даних по низхідній лінії і один або декількористувальницький термінал 120 може надсилати ка наборів користувальницьких терміналів для підтримувані швидкості для всіх своїх широкосмупередачі даних по висхідній лінії для кожного TDD гових просторових каналів низхідної лінії у точку кадру. Кожний набір включає один або декілька 110 доступу, наприклад, через RACH. Як альтеркористувальницьких терміналів і планується для натива, точка 110 доступу може визначати підтрипередачі даних паралельно у призначеному інтермувані швидкості для широкосмугових просторовалі передачі у TDD кадрі. вих каналів низхідної лінії, якщо (1) низхідна лінія і Планувальник 334 формує елемент інформації висхідна лінія є взаємооберненими і (2) точці 110 (IE) для кожного користувальницького термінала, доступ у надається дисперсія шуму або рівень шузапланованого для передачі даних по низхідній му у користувальницькому терміналі 120. Для вилінії і/або висхідній лінії. Кожний елемент інфорсхідної лінії точка 110 доступу може визначати мації включає (1) режим просторового мультиплепідтримувану швидкість для кожного широкосмуксування для використання для передачі даних, гового просторового каналу для кожного запитую(2) швидкість для використання для потоку даних, чого користувальницького термінала 120. що надсилається по кожному широкосмуговому Селектор 1140 користувача вибирає різні напросторовому каналу, (3) початок і тривалість пебори з одного або декількох терміналів з усіх запиредачі даних, і (4) можливо, іншу інформацію (натуючих терміналів для можливої передачі даних приклад, тип пілот-сигналу, призначеного для пепо низхідній лінії і/або висхідній лінії. Користувальредачі спільно з передачею даних). Планувальник ницькі термінали можуть бути вибрані, виходячи з 334 надсилає елементи інформації для всіх зарізних критеріїв, таких як вимоги системи, можлипланованих користувальницьких терміналів через вості користувальницьких терміналів і підтримуваFCCH. Кожний користувальницький термінал обні швидкості, пріоритет користувача, кількість даробляє FCCH для відновлення свого елемента них, призначених для відправки, і т.д. Для інформації, і потім приймає передачу по низхідній багатокористувальницьких режимів просторового лінії і/або надсилає передачу по висхідній лінії мультиплексування користувальницькі термінали відповідно до одержаної інформації планувальнидля кожного набору також можуть вибиратися, ка. базуючись на їх векторах відгуків каналів. 43 83201 44 На Фіг.11 показаний варіант здійснення плануналів приймають з придушеними перехресними вання користувальницьких терміналів для передаперешкодами. чі даних, якщо підтримуються режими просторовоНа Фіг.14 показана блок-схема послідовності го мультиплексування. Планування може операцій процесу 1400 прийому даних по висхідній виконуватися іншими способами, і це знаходиться лінії у ΜΙΜΟ системі 100. Процес 1400 також може у межах об'єму даного винаходу. виконуватися точкою 110х доступ у. Просторову На Фіг.12 показана блок-схема послідовності обробку у приймачі виконують для першої множиоперацій процесу 1200 планування користувальни потоків прийнятих символів відповідно до перницьких терміналів для передачі даних у ΜΙΜΟ шого режиму просторового мультиплексування системі 100. Набір, щонайменше, з одного корис(наприклад, однокористувальницьким направлетувальницького термінала вибирають для переданим режимом) для одержання першої множини чі даних по низхідній лінії і/або висхідній лінії (блок потоків відновлених символів даних (блок 1412). 1212). Для набору користувальницьких терміналів Першу множину потоків відновлених символів давибирають режим просторового мультиплексуванних демодулюють і декодують відповідно до перня з множини режимів просторового мультиплекшої множини швидкостей для одержання першої сування, що підтримуються даною системою (блок множини потоків декодованих даних (блок 1414). 1214). Також для набору користувальницьких терПросторову обробку у приймачі виконують для міналів вибирають множину швидкостей для мнодругої множини потоків прийнятих символів відпожини потоків даних, призначених для передачі відно до другого режиму просторового мультиплечерез множину просторових каналів (блок 1216). ксування (наприклад, ненаправленим режимом) Набір користувальницьких терміналів планують для одержання другої множини потоків відновледля передачі даних по низхідній лінії і/або висхідних символів даних (блок 1416). Другу множину ній лінії з вибраними швидкостями і вибраним репотоків відновлених символів даних демодулюють жимом просторового мультиплексування (блок і декодують відповідно до другої множини швидко1218). стей для одержання другої множини потоків декоНа Фіг.13 показана блок-схема послідовності дованих даних, які є оцінками потоків даних, що операцій процесу 1300 передачі даних по низхідпередаються одним або множиною користувальній лінії у ΜΙΜΟ системі 100. Процес 1300 може ницьких терміналів (блок 1418). виконуватися точкою 110х доступу. Першу множиКожний користувальницький термінал виконує ну потоків даних кодують і модулюють відповідно відповідні операції при передачі даних по одному до першого набору швидкостей для одержання або декількох висхідних широкосмугових простопершої множини потоків символів даних (блок рових каналах і при прийомі даних по одному або 1312). У випадку однокористувальницького напрадекількох низхідних широкосмугових просторових вленого режиму для першої множини потоків симканалах. волів даних виконують просторову обробку за доПередача даних з використанням декількох помогою першої множини напрямних векторів для режимів просторового мультиплексування, виклаодержання першої множини потоків символів педена у даному описі, може бути реалізована за редачі для передачі через множину антен у пердопомогою різних засобів. Наприклад, обробка ший користувальницький термінал у першому інможе бути реалізована у вигляді апаратних засотервалі передачі (блок 1314). Перший набір бів, програмних засобів або їх комбінації. У випаднапрямних векторів виводять таким чином, що ку реалізації у вигляді апаратних засобів, елеменпершу множину потоків даних передають по ортоти, використовувані для виконання обробки даних, гональних просторових каналах у перший користупросторової обробки і планування у точці доступу, вальницький термінал. Другу множину потоків даможуть бути реалізовані в одній або декількох оріних кодують і модулюють відповідно до другої єнтованих на додаток інтегральних схемах (ASIC), множини швидкостей для одержання другої мноцифрових сигнальних процесорах (DSP), цифрожини потоків символів даних (блок 1316). Для одвих сигнальних процесорних пристроях (DSPD), нокористувальницького ненаправленого режиму програмованих логічних пристроях (PLD), внутрішдругу множину потоків символів даних надають як ньосхемно програмованих вентильних матрицях другу множину потоків символів передачі для пе(FPGA), процесорах, контролерах, мікроконтролередачі через множину антен у другий користуварах, інших електронних блоках, виконаних з можльницький термінал у другому інтервалі передачі ливістю виконання функцій, викладених у даному (блок 1318). Третю множину потоків даних кодують описі або їх комбінації. Блоки обробки у користуі модулюють для одержання третьої множини повальницькому терміналі також можуть бути реалітоків символів даних (блок 1320). У випадку багазовані в одній або декількох ASIC, DSP і т.д. токористувальницького направленого режиму для У випадку здійснення у вигляді програмних затретьої множини потоків символів даних виконусобів, обробка у точці доступу і користувальницьють просторову обробку за допомогою другої мнокому терміналі при передачі даних з використанжини напрямних векторів для одержання третьої ням декількох режимів просторового множини потоків символів передачі для передачі мультиплексування, може бути реалізована за через множину антен у множину користувальницьдопомогою модулів (наприклад, процедур, функцій ких терміналів у третьому інтервалі передачі (блок і т.д.), які виконують функції, викладені у даному 1322). Другу множину напрямних векторів вивоописі. Програмні коди можуть зберігатися у западять таким чином, що третю множину потоків симм'ятовуючому пристрої (наприклад, запам'ятовуюволів даних у множині користувальницьких термічих пристроях 332 і 382 за Фіг.8) і виконуватися процесором (наприклад, контролерами 330 і 380). 45 83201 46 Запам'ятовуючий пристрій може бути виконаний у ки використовувати даний винахід. Різні модифіпроцесорі або як зовнішній по відношенню до прокації відносно вказаних варіантів здійснення цесора. повинні бути очевидні для фахівців у даній галузі Заголовки включені у даний опис для поситехніки, і загальні принципи, викладені у даному лання і для допомоги у пошук у визначених роздіописі, застосовні до інших варіантів здійснення без лів. Вказані заголовки не слід розглядати як такі, відходу від суті і об'єму даного винаходу, таким що обмежують об'єм концепцій в озаглавлених чином, даний винахід не обмежується варіантами ними розділах, і ці концепції можуть застосовуваздійснення, розкритими у даному описі, а навпаки, тися в інших розділах по всьому опису. відповідає найширшому об'єму, сумісному з принНаведений вище опис розкритих варіантів ципами і новими відмітними особливостями, розздійснення представлений для того, щоб дати мокритими у даному описі. жливість будь-якому фахівцеві у даній галузі техні 47 83201 48 49 83201 50 51 83201 52 53 83201 54 55 83201 56 57 Комп’ютерна в ерстка О. Гапоненко 83201 Підписне 58 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod (variants) and device (variants) for data transmission and method (variants) and device (variants) for data receive
Автори англійськоюWalton Jay Rodney, Ketchum John W., WALLACE MARK, Howard Stephan J.
Назва патенту російськоюСпособ (варианты) и устройство (варианты) для передачи данных и способ (варианты) и устройство (варианты) для приема данных
Автори російськоюУолтон Джей Родни, Кетчум Джон У., Уоллейс Марк, Говард Стивен Дж.
МПК / Мітки
Мітки: передачі, прийому, спосіб, даних, пристрій, варіанти
Код посилання
<a href="https://ua.patents.su/29-83201-sposib-varianti-i-pristrijj-varianti-dlya-peredachi-danikh-ta-sposib-varianti-i-pristrijj-varianti-dlya-prijjomu-danikh.html" target="_blank" rel="follow" title="База патентів України">Спосіб (варіанти) і пристрій (варіанти) для передачі даних та спосіб (варіанти) і пристрій (варіанти) для прийому даних</a>
Спосіб (варіанти) і пристрій (варіанти) для прийому, спосіб (варіанти) і пристрій для передачі пакетів даних по каналу з автоматичним запитом повтору передачі, носій інформації (варіанти)
Номер патенту: 81231
Опубліковано: 25.12.2007
Автори: Резайіфар Рамін, Вей Йонгбін
МПК: H04L 1/16, H04L 29/08, H04B 7/26
Мітки: автоматичним, варіанти, носій, передачі, пристрій, повтору, пакетів, інформації, запитом, спосіб, прийому, даних, каналу
Формула / Реферат:
1. Спосіб прийому пакетів даних по каналу з автоматичним запитом повтору передачі (АЗПП), який полягає в тому, щоздійснюють прийом поточного підпакета, при цьому поточний підпакет має поточний код, інадсилають сигнал підтвердження прийому в тому випадку, якщобуло здійснене успішне декодування поточного пакета, відповідного поточному підпакету, іпоточний код еквівалентний коду попереднього підпакета.2. Спосіб...
Спосіб зв’язку, система зв’язку (варіанти), пристрій передачі даних (варіанти) та пристрій прийому даних (варіанти)
Номер патенту: 79237
Опубліковано: 11.06.2007
Автори: Оденвалдер Джозеф П., Вей Йонбін, Пюїг Оузес Дейвід, Тідеманн Едвард Г., молодший, Саркар Сандіп, Ландбі Стайн А.
МПК: H04Q 7/22, H04L 12/56
Мітки: система, спосіб, варіанти, пристрій, передачі, прийому, даних, зв'язку
Формула / Реферат:
1. Спосіб зв'язку, що містить етапи, на яких: отримують інформацію для передачі, визначають число інтервалів часу для передачі пакета даних, обчислюють величину контролю помилки з початкової величини, вибраної з набору початкових величин, і інформацію початкової величини і величини контролю помилки, які є функцією числа інтервалів часу, передають обчислену величину контролю помилки згаданої інформації у пакеті даних протягом...
Пристрій безпровідної передачі даних (варіанти) та спосіб керування потоком даних у розподільній системі передачі даних (варіанти)
Номер патенту: 75914
Опубліковано: 15.06.2006
Автори: Кімбалл Роберт Г., Бендер Пол І., Кармі Гаді, роб Метью С.
МПК: H04L 12/56, H04L 12/28
Мітки: потоком, пристрій, даних, варіанти, безпровідної, розподільний, передачі, керування, спосіб, системі
Формула / Реферат:
1. Пристрій безпровідної передачі даних, який включає:- сукупність пунктів доступу до мережі, причому кожний із зазначеної сукупності пунктів доступу до мережі має конфігурацію для: зв‘язку з щонайменше двома з сукупності маршрутизаторів і зв'язку з щонайменше одним віддаленим користувачем.2. Пристрій за п. 1, який відрізняється тим, що додатково має сукупність опорних точок, причому кожна із зазначеної сукупності...
Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів у системі безпровідного зв’язку, а також пристрій прийому пакетних даних через щонайменше один канал першого н
Номер патенту: 75612
Опубліковано: 15.05.2006
Автори: Разумов Леонід, Ландбі Стайн А., Бао Ґанґ
МПК: H04Q 7/38, H04L 12/56
Мітки: канал, затримкою, безпровідного, також, спосіб, множину, низькою, зв'язку, щонайменше, каналів, підтримки, першого, пристрій, системі, прийому, передачі, даних, пакетних
Формула / Реферат:
1. Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів передачі у системі безпровідного зв'язку, який включає:- передачу пакетних даних через набір каналів пакетних даних, - передачу керуючої інформації, пов'язаної з цими пакетними даними через канал сигналізації, причому канал сигналізації відокремлений від набору каналів передачі пакетних даних, і керуюча інформація ідентифікує...
Пристрій прийому-передачі даних

Номер патенту: 26992
Опубліковано: 28.02.2000
Автори: Чаплига Вячеслав Михайлович, Коноплянко Зеновій Дмитрович, Попович Галина Богданівна, Лосєва Тетяна Віталіївна
МПК: G08C 15/00, H04B 5/02
Мітки: прийому-передачі, пристрій, даних
Формула / Реферат:
Пристрій прийому-передачі даних, що містить на передавальному боці дешифратор двозначного позиційного коду в унітарний просторовий код, що складається з трьох елементів І-НЕ, цифро-аналоговий перетворювач і канал зв'язку, а на приймальному боці - аналого-цифровий перетворювач та дешифратор просторового одиничного коду в двозначний позиційний код, що містить групи тригерів та суматор, який відрізняється тим, що у пристрій уведені на...
Попередній патент: Сполука 2,3-дігідро-6-нітроімідазо[2,1-b]оксазолу
Наступний патент: Фенілзаміщені піперидини для використання як активаторів рапп
Випадковий патент: Процес розмелювання какаовели