Спосіб оптимізації роботи судового плавцевого рушія
Номер патенту: 14811
Опубліковано: 18.02.1997
Автори: Каян Володимир Павлович, Довгий Станіслав Олексійович, Шеховцов Олександр Володимирович
Формула / Реферат
1. Способ оптимизации работы судового плавникового движителя, основанный на изменении угловой амплитуды колебаний крыла в зависимости от относительной скорости крыла, отличающийся тем, что величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла, а угловую амплитуду для движителя, колеблющееся крыло которого имеет величину критического угла атаки a кр большую либо равную 20°, задают в соответствия с зависимостью
при величине относительной скорости, находящейся в интервале
от до
и в соответствии с зависимостью
при величине относительной скорости lр большей
17/a кр
2. Способ оптимизации работы судового плавникового движителя по пункту 1, отличающийся тем, что для движителя, колеблющееся крыло которого имеет величину критического угла атаки a кр меньшую 20°, угловую амплитуду задают в соответствии с зависимостью
при величине относительной скорости, находящейся в интервале от lр = 2,54 – 1,28 lg
a кр до lр=17/a кр ,
где q [град] - угловая амплитуда колебаний крыла;
a кр [град] - критический угол атаки крыла при стационарном обтекании :
[ -] - относительная скорость крыла;
U [м/с] - поступательная скорость движения судна;
n [1 /с] - частота колебаний крыла;
А [м] - линейная амплитуда колебаний крыла.
Текст
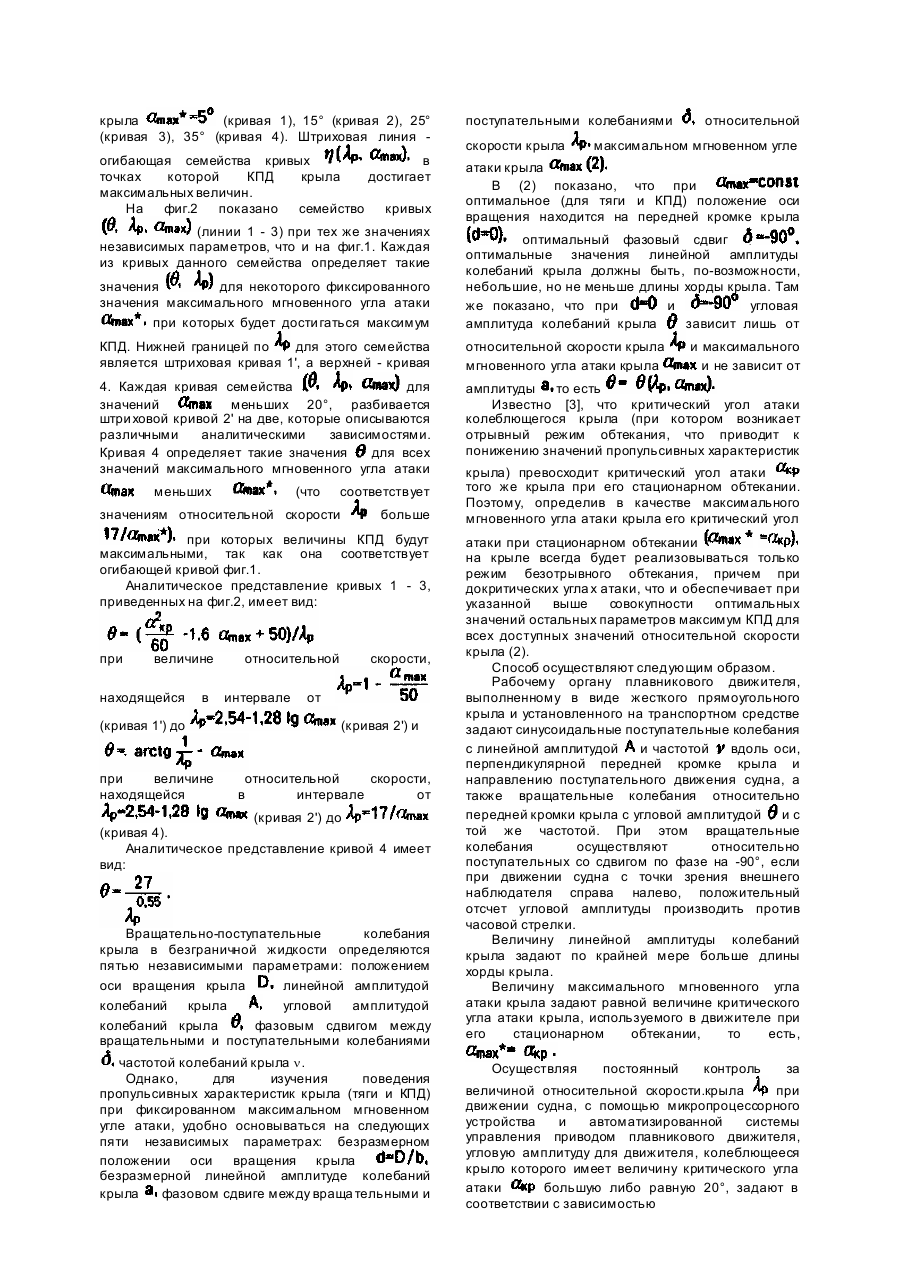
Изобретение относится к области судостроения, в частности к плавниковым движителям с рабочим органом в виде жесткого крыла, совершающего синусоидальные вращательно-поступательные колебания. Известен принятый в качестве аналога "Способ регулирования тяги судового машущего движителя" [1], в котором рабочему органу машущего движителя, выполненному в виде жесткого прямоугольного крыла с хордой профиля в [м] и установленного на транспортном средстве, задают синусоидальные поступательные колебания перпендикулярно передней кромке крыла с линейной амплитудой и частотой а также вращательные относительно нее же с угловой амплитудой и той же частотой, причем вращательные колебания осуществляют относительно поступательных со сдвигом по фазе на С целью обеспечения максимального КПД движителя с помощью приводного механизма и системы управления крылу задают угловую амплитуду колебаний в зависимости от безразмерной линейной амплитуды колебаний и от относительной скорости крыла поступательная скорость соответствии с формулой: где движения судна, повышение эффективности работы судового плавникового движителя путем обеспечения его максимального КПД на всем доступном диапазоне значений относительной скорости крыла при осуществлении контроля за максимальным мгновенным углом атаки. Поставленная задача решается тем, что в способе оптимизации работы судового плавникового движителя, основанного на изменении угловой амплитуды колебаний крыла в зависимости от относительной скорости крыла, согласно изобретению, величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла, а угловую амплитуду для движителя, колеблющееся крыло которого имеет величину критического угла атаки большую либо равную соответствии с зависимостью при величине 20°, относительной задают в скорости, находящейся в интервале от до и в соотве тствии с зависимостью в при величине относительной скорости в которой величина безразмерной линейной амплитуды лежит в пределах 0,1 - 1,0. Одновременно, с помощью специальных датчиков контролируют величины параметров и ив случае изменения во время работы машущего движителя какой-нибудь из них, производят корректировку величины чтобы она всегда удовлетворяла приведенному соотношению (СССР, а.с. №1615056, кл. B63H1/36, 1990). Указанное изобретение выбрано в качестве прототипа заявляемого изобретения. Недостатками указанного "Способа" является, во-первых, то, что оптимизационная зависимость, на которой он основан, была построена при отсутствии контроля за максимальным мгновенным углом атаки на крыле, что для малых значений относительной скорости может приводить к внезапному ухудшению режима обтекания крыла, а для остальных значений не будет обеспечиваться максимально эффективный режим работы движителя [2]. Во-вторых, "Способ" действует для некоторого ограниченного интервала значений величины безразмерной линейной амплитуды в то время, как оптимизация с учетом всех независимых параметров, определяющих вращательнопоступательное движение крыла дает другой оптимальный интервал для [2]. Кроме этого, при задании направлений поступательного и вращательного колебаний крыла указанным "Способом" допускаются неоднозначности. В заявляемом изобретении вместо термина "машущий движитель" используется термин "плавниковый движитель", так как это более точно отражает принцип на котором основана работа движителя. Задача, решаемая данным изобретением большей Для движителя, колеблющееся крыло которого имеет величину критического угла атаки меньшую 20°, угловую амплитуду задают в соответствии с зависимостью при величине относительной скорости, находящейся в интервале от в до соответствии с зависимостью при величине относительной скорости, находящейся в интервале от до и в соотве тствии с зависимостью при величине относительной скорости большей где - критический угол атаки крыла при стационарном обтекании. Способ поясняется графиками, приведенными на фиг.1 и 2. На фиг.1 показана зависимость КПД крыла от относительной скорости крыла, когда ось вращения крыла совмещена с его передней кромкой, при значении фазового сдвига между вращательными и поступательными колебаниями значении безразмерной линейной амплитуды колебаний и значениях максимального мгновенного угла атаки крыла (кривая 1), 15° (кривая 2), 25° (кривая 3), 35° (кривая 4). Штриховая линия поступательными колебаниями огибающая семейства кривых в точках которой КПД крыла достигает максимальных величин. На фиг.2 показано семейство кривых атаки крыла В (2) показано, что при оптимальное (для тяги и КПД) положение оси вращения находится на передней кромке крыла (линии 1 - 3) при тех же значениях независимых параметров, что и на фиг.1. Каждая из кривых данного семейства определяет такие скорости крыла относительной максимальном мгновенном угле значения для некоторого фиксированного значения максимального мгновенного угла атаки при которых будет дости гаться максимум оптимальный фазовый сдвиг оптимальные значения линейной амплитуды колебаний крыла должны быть, по-возможности, небольшие, но не меньше длины хорды крыла. Там же показано, что при и угловая амплитуда колебаний крыла зависит лишь от КПД. Нижней границей по для этого семейства является штриховая кривая 1', а верхней - кривая относительной скорости крыла мгновенного угла атаки крыла 4. Каждая кривая семейства для значений меньших 20°, разбивается штри ховой кривой 2' на две, которые описываются различными аналитическими зависимостями. Кривая 4 определяет такие значения для всех значений максимального мгновенного угла атаки амплитуды то есть Известно [3], что критический угол атаки колеблющегося крыла (при котором возникает отрывный режим обтекания, что приводит к понижению значений пропульсивных характеристик меньших (что соответствует значениям относительной скорости больше при которых величины КПД будут максимальными, так как она соответствует огибающей кривой фиг.1. Аналитическое представление кривых 1 - 3, приведенных на фиг.2, имеет вид: при величине находящейся в (кривая 1') до при величине находящейся относительной интервале скорости, от (кривая 2') и относительной скорости, в интервале от (кривая 2') до (кривая 4). Аналитическое представление кривой 4 имеет вид: Вращательно-поступательные колебания крыла в безграничной жидкости определяются пятью независимыми параметрами: положением оси вращения крыла линейной амплитудой колебаний крыла угловой амплитудой колебаний крыла фазовым сдвигом между вращательными и поступательными колебаниями частотой колебаний крыла n. Однако, для изучения поведения пропульсивных характеристик крыла (тяги и КПД) при фиксированном максимальном мгновенном угле атаки, удобно основываться на следующих пяти независимых параметрах: безразмерном положении оси вращения крыла безразмерной линейной амплитуде колебаний крыла фазовом сдвиге между враща тельными и и максимального и не зависит от крыла) превосходит критический угол атаки того же крыла при его стационарном обтекании. Поэтому, определив в качестве максимального мгновенного угла атаки крыла его критический угол атаки при стационарном обтекании на крыле всегда будет реализовываться только режим безотрывного обтекания, причем при докритических угла х атаки, что и обеспечивает при указанной выше совокупности оптимальных значений остальных параметров максимум КПД для всех доступных значений относительной скорости крыла (2). Способ осуществляют следующим образом. Рабочему органу плавникового движителя, выполненному в виде жесткого прямоугольного крыла и установленного на транспортном средстве задают синусоидальные поступательные колебания с линейной амплитудой и частотой вдоль оси, перпендикулярной передней кромке крыла и направлению поступательного движения судна, а также вращательные колебания относительно передней кромки крыла с угловой амплитудой ис той же частотой. При этом вращательные колебания осуществляют относительно поступательных со сдвигом по фазе на -90°, если при движении судна с точки зрения внешнего наблюдателя справа налево, положительный отсчет угловой амплитуды производить против часовой стрелки. Величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла. Величину максимального мгновенного угла атаки крыла задают равной величине критического угла атаки крыла, используемого в движителе при его стационарном обтекании, то есть, Осуществляя постоянный контроль за величиной относительной скорости.крыла при движении судна, с помощью микропроцессорного устройства и автоматизированной системы управления приводом плавникового движителя, угловую амплитуду для движителя, колеблющееся крыло которого имеет величину критического угла атаки большую либо равную 20°, задают в соответствии с зависимостью при величине относительной скорости, находящейся в интервале от до и в соотве тствии с зависимостью при величине относительной скорости большей Длядвижителя, колеблющееся крыло которого имеет величину критического угла атаки меньшую 20°, угловую амплитуду задают соответствии с зависимостью при величине относительной скорости, находящейся в интервале от зависимостью при величине находящейся в в до соответствии с относительной скорости, в интервале от до соответствии с зависимостью при величине относительной скорости и в большей где - критический угол атаки крыла при стационарном обтекании.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of optimization of operation of ship fin propeller
Автори англійськоюShekhovtsov Oleksandr Volodymyrovych, Dovhyi Stanislav Oleksiiovych, Kaian Volodymyr Pavlovych
Назва патенту російськоюСпособ оптимизации работы судового плавникового движителя
Автори російськоюШеховцов Александр Владимирович, Довгий Станислав Алексеевич, Каян Владимир Павлович
МПК / Мітки
МПК: B63H 1/36
Мітки: рушія, спосіб, плавцевого, судового, оптимізації, роботи
Код посилання
<a href="https://ua.patents.su/3-14811-sposib-optimizaci-roboti-sudovogo-plavcevogo-rushiya.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимізації роботи судового плавцевого рушія</a>
Сопло я.с. барика суднового водометального рушія

Номер патенту: 443
Опубліковано: 30.04.1993
Автор: Барик Ярослав Сільвестрович
МПК: B63H 11/00
Мітки: рушія, сопло, барика, водометального, я.с, суднового
Формула / Реферат:
(57) Сопло судового водометного движителя, выполненное в виде рукава из эластичного материала и содержащее устройство для регулирования его поперечного сечения, отличающееся тем, что, с целью увеличения КПД движители путем повышения надежности регулирования площади выходного сечения, вышеупомянутое устройство выполнено с шайбами, установленными на входе и выходе, сопла с возможностью их взаимного поворота вокруг продольной оси движителя, при...
Коток підтримуючий гусеничного рушія
Номер патенту: 3813
Опубліковано: 27.12.1994
Автори: Яценко Валентин Іванович, Гайовий Анатолій Петрович, Шатравка Олексій Якович, Лайко Валентина Яківна, Степаненко Володимир Кирилович
МПК: B62D 55/14
Мітки: підтримуючий, рушія, коток, гусеничного
Формула / Реферат:
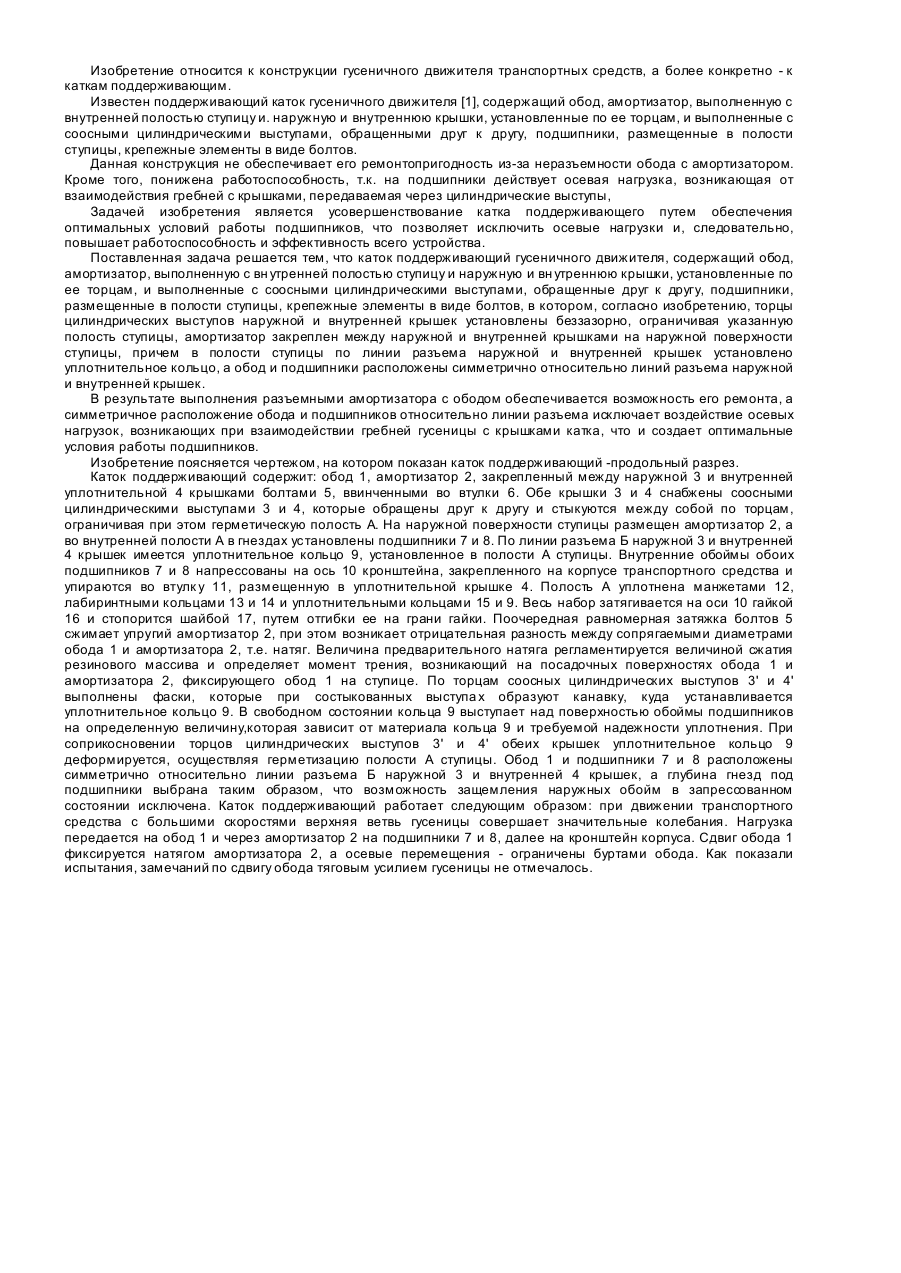
1. Каток поддерживающий гусеничного движителя, содержащий обод, амортизатор, выполненную с внутренней полостью ступицу и наружную и внутреннюю крышки, установленные по ее торцам, и выполненные с соосными цилиндрическими выступами, обращенными друг к другу, подшипники, размещенные о полости ступицы, крепежные элементы в виде болтов, отличающийся тем, что торцы цилиндрических выступов наружной и внутренней крышек установлены беззазорно,...
Спосіб сейсморозвідки
Номер патенту: 4329
Опубліковано: 27.12.1994
Автор: Васильєв Юрій Анатолієвич
МПК: G01V 1/00
Мітки: сейсморозвідки, спосіб
Формула / Реферат:
Способ сейсморазведки, предусматривающий возбуждение сейсмических колебаний источником, запись на один сейсморегистрирующий канал колебаний площадной или линейной группой сейсмоприемников, равномерно расположенных на большой базе в пределах эпицентральной зоны отраженной волны с известной преобладающей частотой f0 и скоростью распространения колебаний v, интерпретацию полученных записей и построение скоростного разреза, отличающийся...
Модульна зашивка судового приміщення
Номер патенту: 4860
Опубліковано: 28.12.1994
Автори: Железняк Михайло Леонідович, Гнезділов Віктор Валентинович, Ельгарт Яків Леонідович, Багненко Федір Михайлович, Гріффен Леонід Олександрович, Куперман Фелікс Ушерович, Благодатний Валентин Володимирович, Захаров Юрій Васильович, Крицкий Віталій Данилович, Теплинський Семен Олександрович, Акулов Володимир Андрійович
МПК: B63B 3/68
Мітки: судового, модульна, приміщення, зашивка
Формула / Реферат:
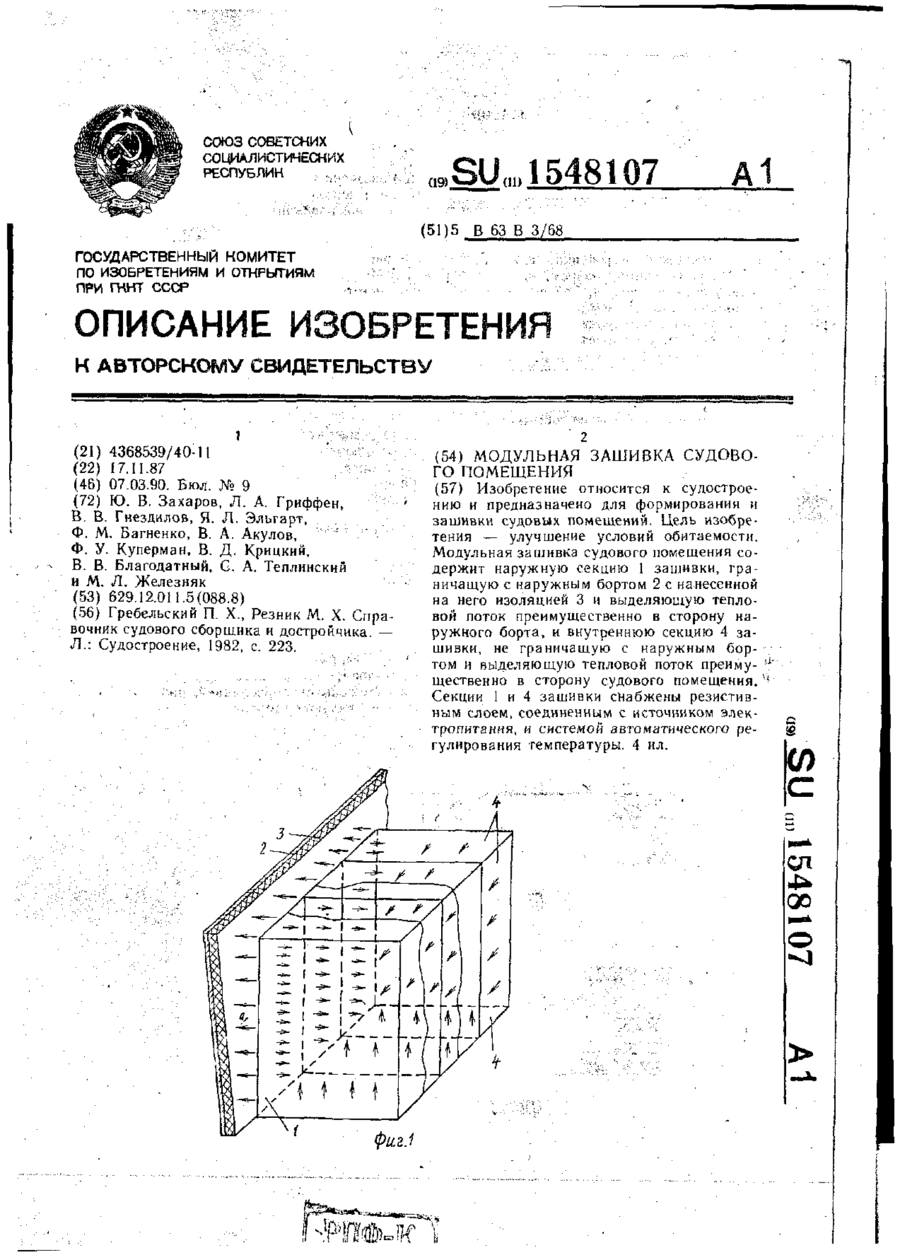
Модульная зашивка судового помещения, граничащего с наружным бортом, состоящая из наружных и внутренних секций, выполненных из установленных на обрешетнике панелей с декоративным покрытием, отличающаяся тем, что, с целью улучшения условий обитаемости, панели секций снабжены резистивным слоем, причем панели внутренних секций снабжены теплоизоляцией, размещенной на их тыльных сторонах.
Система керування та захусту судового газотурбінного устаткування
Номер патенту: 1761
Опубліковано: 25.10.1994
Автори: Москалець Павло Пімонович, Дзюріч Анатолій Іванович, Плужніков Олександр Федорович
МПК: B63H 21/00
Мітки: система, устаткування, газотурбінного, керування, захусту, судового
Формула / Реферат:
Система управления и защиты судовой газотурбинной установки, включающей в себя газотурбинный двигатель со свободной силовой турбиной, работающий через гидромуфты переднего или заднего хода, и редуктор на гребной винт. содержащая исполнительный механизм, кинематически связанный с дозатором топлива и подключенный к задатчику, последовательно соединенные датчики аварий ной защиты двигателя и редуктора, блок защиты и стоп-кран и клапаны...
Попередній патент: Спосіб та пристрій для утилізації продуктів життєдіяльності людини
Наступний патент: Спосіб визначення ступеню тяжкості вібраційної хвороби
Випадковий патент: Спосіб вирощування об'ємних вій за індріксоном