Спосіб контролю натягнення каната
Номер патенту: 15096
Опубліковано: 15.06.2006
Автори: Чорний Олександр Микитович, Волкова Ірина Миколаївна, Аріст Леонід Михайлович, Маковенко Анатолій Павлович
Формула / Реферат
Спосіб контролю натягнення каната, що включає взаємодію обкатного ролика з канатом і контакт башмака важеля з кінцевим вимикачем при ослабленні каната, який відрізняється тим, що паралельно встановлюють додатковий обкатний ролик, укладають на нього гілку другого каната, та сполучають між собою рухомою тягою щоковини, в яких закріплені кожний з обкатних роликів.
Текст
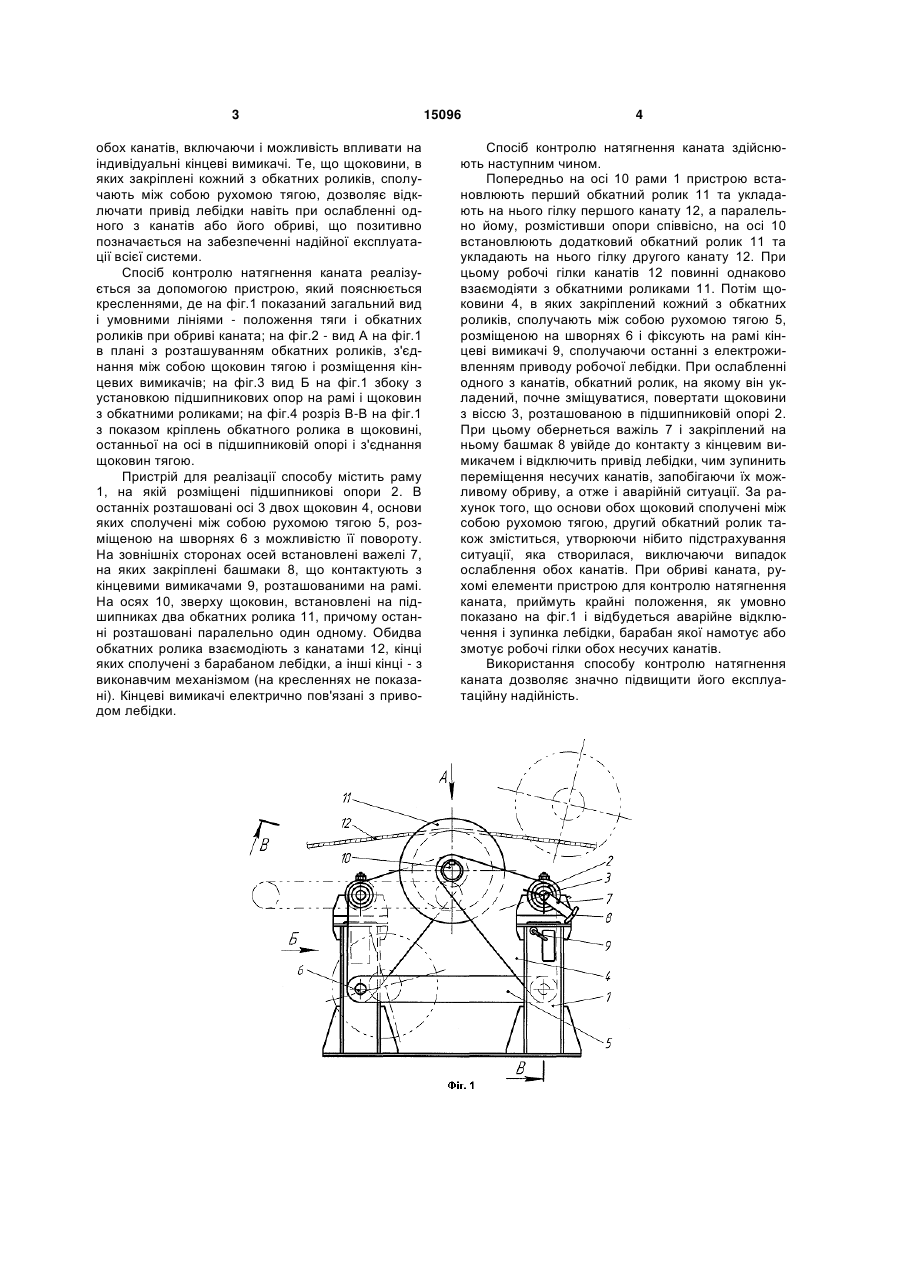
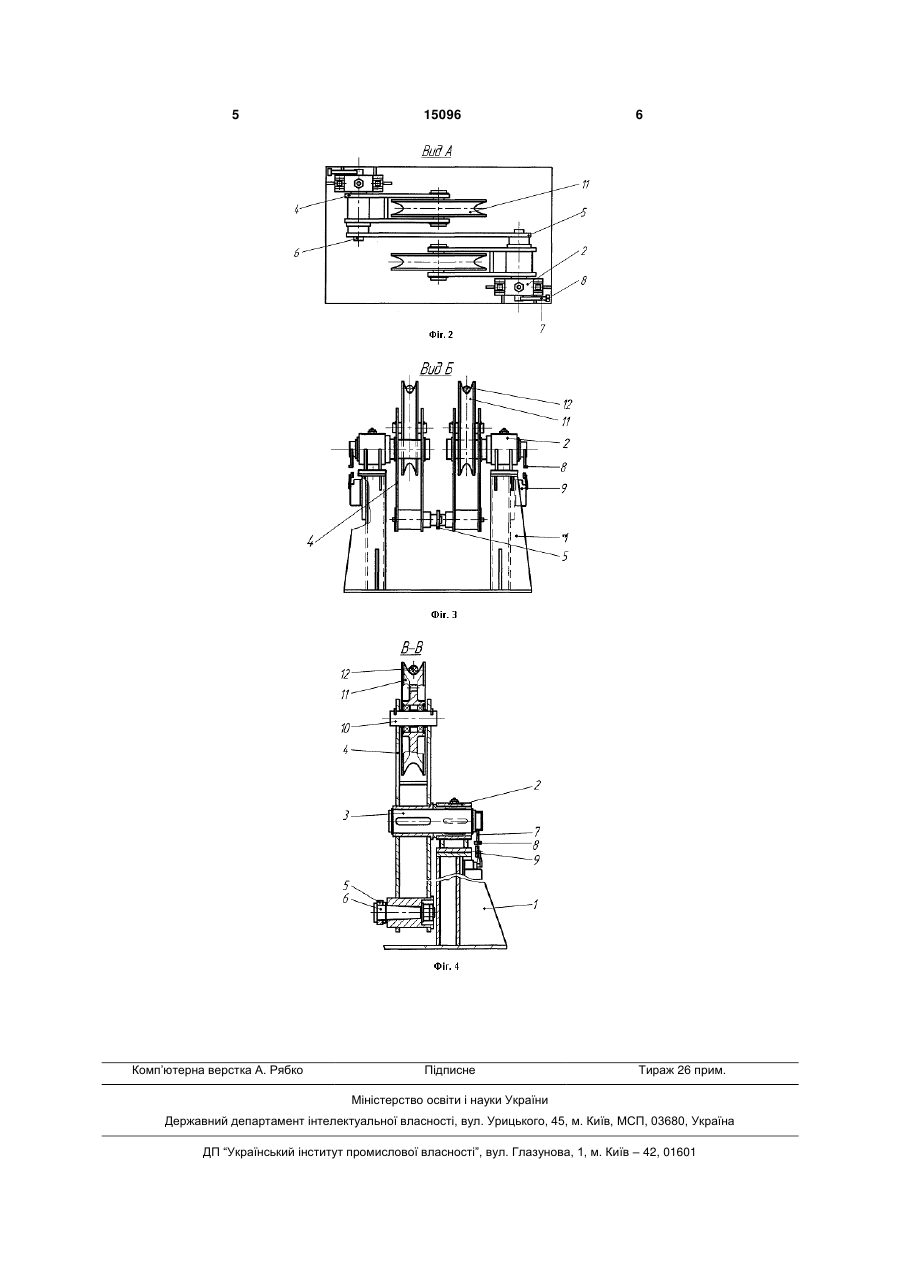
Спосіб контролю натягнення каната, що включає взаємодію обкатного ролика з канатом і контакт башмака важеля з кінцевим вимикачем при ослабленні каната, який відрізняється тим, що паралельно встановлюють додатковий обкатний ролик, укладають на нього гілку другого каната, та сполучають між собою рухомою тягою щоковини, в яких закріплені кожний з обкатних роликів. (19) (21) u200511851 (22) 12.12.2005 (24) 15.06.2006 (46) 15.06.2006, Бюл. № 6, 2006 р. (72) Аріст Леонід Михайлович, Чорний Олександр Микитович, Маковенко Анатолій Павлович, Волкова Ірина Миколаївна (73) УКРАЇНСЬКИЙ ДЕРЖАВНИЙ ІНСТИТУТ ПО ПРОЕКТУВАННЮ МЕТАЛУРГІЙНИХ ЗАВОДІВ 3 обох канатів, включаючи і можливість впливати на індивідуальні кінцеві вимикачі. Те, що щоковини, в яких закріплені кожний з обкатних роликів, сполучають між собою рухомою тягою, дозволяє відключати привід лебідки навіть при ослабленні одного з канатів або його обриві, що позитивно позначається на забезпеченні надійної експлуатації всієї системи. Спосіб контролю натягнення каната реалізується за допомогою пристрою, який пояснюється кресленнями, де на фіг.1 показаний загальний вид і умовними лініями - положення тяги і обкатних роликів при обриві каната; на фіг.2 - вид А на фіг.1 в плані з розташуванням обкатних роликів, з'єднання між собою щоковин тягою і розміщення кінцевих вимикачів; на фіг.3 вид Б на фіг.1 збоку з установкою підшипникових опор на рамі і щоковин з обкатними роликами; на фіг.4 розріз В-В на фіг.1 з показом кріплень обкатного ролика в щоковині, останньої на осі в підшипниковій опорі і з'єднання щоковин тягою. Пристрій для реалізації способу містить раму 1, на якій розміщені підшипникові опори 2. В останніх розташовані осі 3 двох щоковин 4, основи яких сполучені між собою рухомою тягою 5, розміщеною на шворнях 6 з можливістю її повороту. На зовнішніх сторонах осей встановлені важелі 7, на яких закріплені башмаки 8, що контактують з кінцевими вимикачами 9, розташованими на рамі. На осях 10, зверху щоковин, встановлені на підшипниках два обкатних ролика 11, причому останні розташовані паралельно один одному. Обидва обкатних ролика взаємодіють з канатами 12, кінці яких сполучені з барабаном лебідки, а інші кінці - з виконавчим механізмом (на кресленнях не показані). Кінцеві вимикачі електрично пов'язані з приводом лебідки. 15096 4 Спосіб контролю натягнення каната здійснюють наступним чином. Попередньо на осі 10 рами 1 пристрою встановлюють перший обкатний ролик 11 та укладають на нього гілку першого канату 12, а паралельно йому, розмістивши опори співвісно, на осі 10 встановлюють додатковий обкатний ролик 11 та укладають на нього гілку другого канату 12. При цьому робочі гілки канатів 12 повинні однаково взаємодіяти з обкатними роликами 11. Потім щоковини 4, в яких закріплений кожний з обкатних роликів, сполучають між собою рухомою тягою 5, розміщеною на шворнях 6 і фіксують на рамі кінцеві вимикачі 9, сполучаючи останні з електроживленням приводу робочої лебідки. При ослабленні одного з канатів, обкатний ролик, на якому він укладений, почне зміщуватися, повертати щоковини з віссю 3, розташованою в підшипниковій опорі 2. При цьому обернеться важіль 7 і закріплений на ньому башмак 8 увійде до контакту з кінцевим вимикачем і відключить привід лебідки, чим зупинить переміщення несучих канатів, запобігаючи їх можливому обриву, а отже і аварійній ситуації. За рахунок того, що основи обох щоковий сполучені між собою рухомою тягою, другий обкатний ролик також зміститься, утворюючи нібито підстрахування ситуації, яка створилася, виключаючи випадок ослаблення обох канатів. При обриві каната, рухомі елементи пристрою для контролю натягнення каната, приймуть крайні положення, як умовно показано на фіг.1 і відбудеться аварійне відключення і зупинка лебідки, барабан якої намотує або змотує робочі гілки обох несучих канатів. Використання способу контролю натягнення каната дозволяє значно підвищити його експлуатаційну надійність. 5 Комп’ютерна верстка А. Рябко 15096 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of rope tension
Автори англійськоюArist Leonid Mykhailovych, Chornyi Oleksandr Mykytovych, Makovenko Anatolii Pavlovych
Назва патенту російськоюСпособ контроля натяжения каната
Автори російськоюАрист Леонид Михайлович, Черный Александр Никитович, Маковенко Анатолий Павлович
МПК / Мітки
МПК: B66B 5/12
Мітки: каната, контролю, спосіб, натягнення
Код посилання
<a href="https://ua.patents.su/3-15096-sposib-kontrolyu-natyagnennya-kanata.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю натягнення каната</a>
Підвісний пристрій для плоского каната

Номер патенту: 34230
Опубліковано: 16.06.2003
Автори: Колосов Дмитро Леонідович, Колосов Леонід Вікторович, Чеберячко Сергій Іванович
МПК: B66B 7/06
Мітки: пристрій, підвісний, плоского, каната
Формула / Реферат:
Підвісний пристрій для плоского каната, який містить коуш і обвідний барабан, з'єднані траверсами, розміщеними по обидва боки від них, і пакет із двох канатів, який відрізняється тим, що коуш і барабан з’єднані жорстко, а пакет із двох канатів розташований на барабані.
Пристрій для натягнення каната постава стрічкового конвейєра
Номер патенту: 16518
Опубліковано: 29.08.1997
Автори: Андреєв Анатолій Григорович, Сорока Георгій Митрофанович
МПК: B65G 21/00
Мітки: натягнення, каната, стрічкового, конвейєра, пристрій, постава
Формула / Реферат:
Устройство для натяжения каната става ленточного конвейера, включающее огибаемые канатом отклоняющие блоки и натяжной блок, установленный на ползуне, расположенном в направляющей и связанном с ней винтом с перемещающим механизмом, отличающееся тем, что, с целью снижения трудоемкости натяжения нагруженного каната путем обеспечения для этого необходимого усилия, винт снабжен вилкой, а перемещающий механизм выполнен в виде стержня с резьбой и...
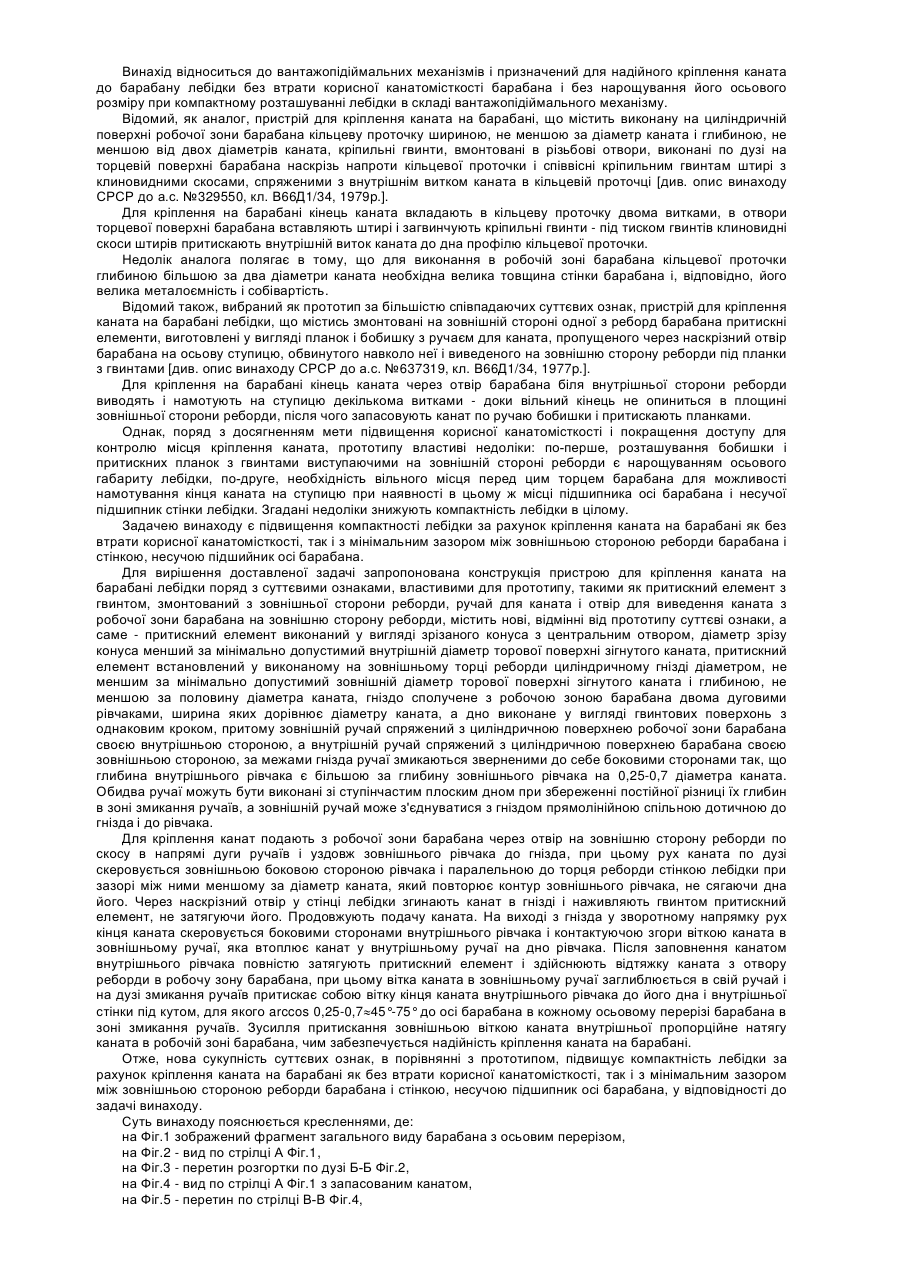
Пристрій для кріплення каната на барабані лебідки
Номер патенту: 72902
Опубліковано: 16.05.2005
Автори: Вільк Тадей Андрійович, Швідлер Олександр Петрович, Коваленко Володимир Ілліч, Орленко Юрій Володимирович, Хом'як Роман Ілліч
МПК: B66D 1/28
Мітки: каната, пристрій, лебідки, барабані, кріплення
Формула / Реферат:
1. Пристрій для кріплення каната на барабані лебідки, що містить притискний елемент з гвинтом, змонтований з зовнішньої сторони реборди, рівчак для каната і отвір для виведення каната з робочої зони барабана на зовнішню сторону реборди, який відрізняється тим, що притискний елемент виконаний у вигляді зрізаного конуса з центральним отвором, діаметр зрізу конуса менший за мінімально допустимий внутрішній діаметр торової поверхні зігнутого...
Пристрій для подачі каната лебідки

Номер патенту: 2394
Опубліковано: 15.03.2004
Автори: Бакушин Анатолій Олексійович, Ємельянов Віталій Васильович, Веретенніков Олександр Іванович, Богачев Сергій Веніамінович, Фесенко Анатолій Федорович, Старчіков Роман Вікторович
МПК: B66D 1/00
Мітки: лебідки, подачі, каната, пристрій
Формула / Реферат:
Пристрій для подачі каната лебідки, що містить корпус як коробчасту конструкцію, закріплену на внутрішній стороні кришки люка, у якому встановлені ролики на осях у підшипниках, зафіксованих упорними кільцями, до корпусу з боку горизонтальних роликів закріплений канатоочисник, що складається з двох пар колодок, одна пара яких з'єднана між собою за допомогою скоби, а друга - пружиною, який відрізняється тим, що канатоочисник обладнаний...
Спосіб віддалення з свеодловини каротажного кабеля або каната
Номер патенту: 32779
Опубліковано: 15.02.2001
Автори: Пустовойтенко Іван Павлович, Калина Леон Михайлович
МПК: E21B 31/00
Мітки: свеодловини, кабеля, спосіб, каротажного, віддалення, каната
Формула / Реферат:
Спосіб видалення з свердловини каротажного кабелю або каната при руйнуванні його механічним шляхом, який відрізняється тим, що каротажний кабель або канат, які залишилися в свердловині, проштовхують до якомога більшої глибини, заливають над ними розчин, що швидко тужавіє, і під тиском або під власною вагою розміщують його в зоні знаходження каротажного кабеля чи каната, витримують його в стані спокою до створення твердої металевоцементної...
Попередній патент: Одноразовий медичний шприц
Наступний патент: Пристрій для контролю натягнення каната
Випадковий патент: Спосіб одержання (s)-n-метил-3-(нафтилокси)-3-(2-тієніл)пропіламінгідрохлориду (дулоксетину)