Електропривод з частотно-струмовим управлінням

Формула / Реферат
Электропривод с частотно-токовым управлением, содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход — к входу датчика положения, блок задания фазных токов, выходы которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходо-вой сумматор, блок задания начальной фазы, отличающийся тем, что введены преобразователь приращений периода в код, который подключен первым входом к выходу датчика положения, а вторым входом к генератору опорной частоты, накопитель приращений с запрещающим входом, который подключен входом к выходу преобразователя приращений периода в код, а выходом к первому входу двухвходового сумматора, второй вход которого подключен к блоку задания начальной фазы, функциональный преобразователь, который подключен входом к выходу двухвходового сумматора, а выходом к объединенным входам постоянных запоминающих устройств, датчик положения снабжен дополнительным выходом, который подключен к запрещающему входу накопителя приращений.
Текст
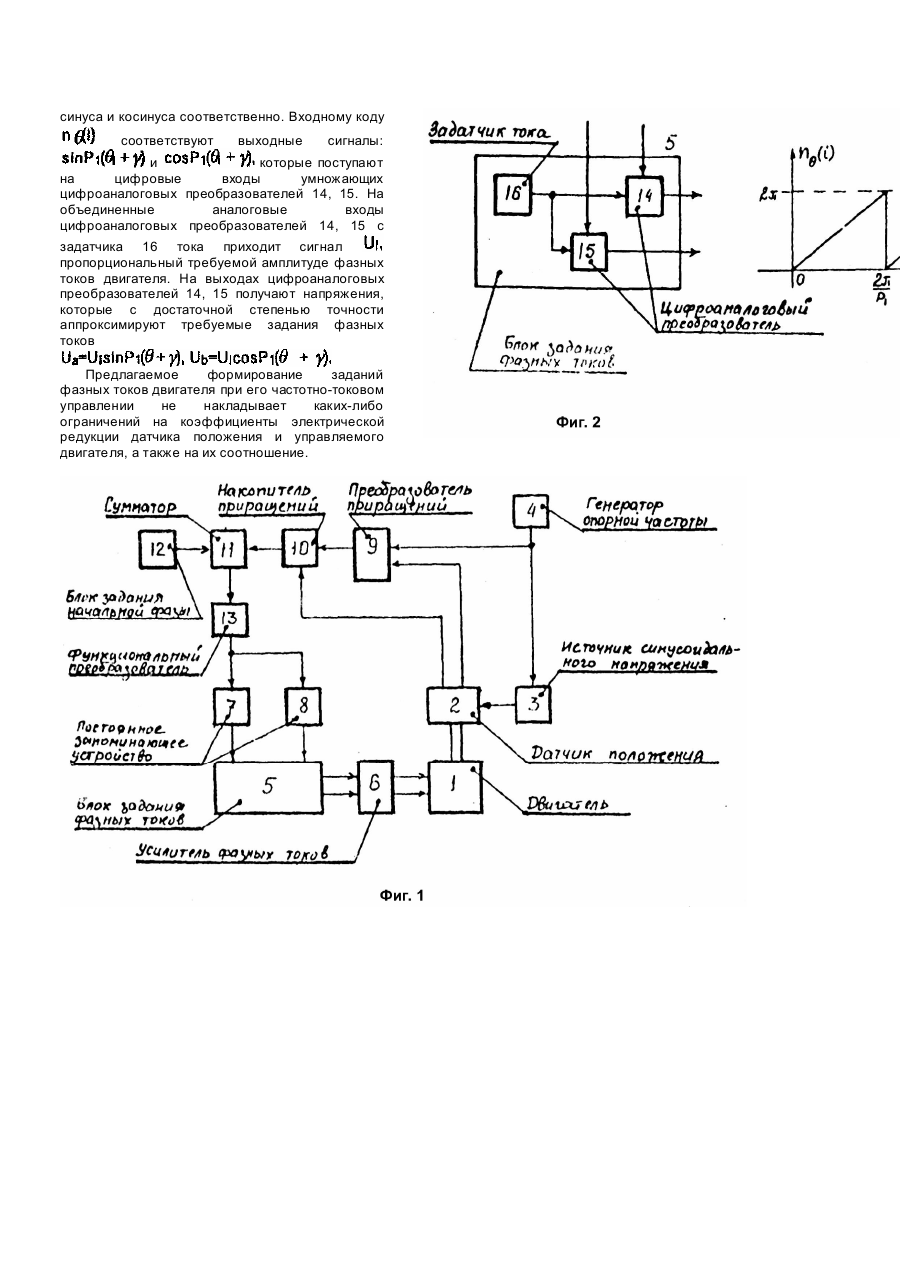
Предлагаемое изобретение относится к электротехнике и может быть использовано в приводах с частотно-токовым управлением, в частности в линейном приводе переменного тока. Наиболее близким к предлагаемому является электропривод с частотно-токовым управлением [1], содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход - к входу датчика положения, блок задания фазных токов, выходы которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходовой сумматор, блок задания начальной фазы. Электропривод также содержит фазосмещающий блок, регистр, счетчики, демультиплексор, нуль-орган, преобразователь напряжение - частота. Блок задания фазных токов включает в себя блок задания амплитуды тока и цифроаналоговые преобразователи. В известном устройстве используют в качестве датчика положения фазовращатель с коэффициентом электрической редукции, который равен или меньше коэффициента электрической редукции двигателя. Недостатком известного электропривода является невозможность использования в качестве датчика положения фазовращатель с коэффициентом электрической редукции больше коэффициента электрической редукции двигателя. Предполагаемое изобретение направлено на расширение области применения за счет обеспечения возможности использования в качестве датчика положения фазовращатель с коэффициентом электрической редукции как меньше, так и больше коэффициента электрической редукции двигателя. Решение поставленной задачи достигается тем, что в электропривод с частотно-токовым управлением, содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход - к входу датчика положения, блок задания фазных токов, выходы которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходовой сумматор, блок задания начальной фазы, согласно изобретению, введены преобразователь приращений периода в код, который подключен первым входом к выходу датчика положения, а вторым входом к генератору опорной частоты, накопитель приращений с запрещающим входом, который подключен входом к выходу преобразователя приращений периода в код, а выходом к первому входу двухвходового сумматора, второй вход которого подключен к блоку задания начальной фазы, функциональный преобразователь, который подключен входом к выходу двухвходового сумматора, а выходом к объединенным входам постоянных запоминающих устройств, датчик положения снабжен дополнительным выходом, который подключен к запрещающему входу накопителя приращений. С помощью преобразователя приращений периода в код, который учитывает коэффициент электрической редукции датчика положения, определяют приращение угла поворота ротора двигателя за период выходного сигнала датчика положения. С помощью накопителя приращений определяют полный угол поворота ротора двигателя, С помощью функционального преобразователя, который учитывает коэффициент электрической редукции двигателя, вырабатывают код электрического угла фазных токов двигателя. Это позволяет с помощью постоянных запоминающих устройств формировать в фазных обмотках двигателя требуемые токи управления. При таком подходе к формированию фазных токов двигателя представляется возможным использовать в электроприводе в качестве датчика положения фазовращатель с коэффициентом электрической редукции как меньше, так и больше коэффициента электрической редукции двигателя. Промышленное применение предполагаемого изобретения за счет обеспечения возможности использования в качестве датчика положения фазовращатель с коэффициентом электрической редукции как меньше, так и больше коэффициента электрической редукции двигателя позволяет расширить область применения электропривода с частотно-токовым управлением. На фиг.1 представлена схема электропривода; на фиг.2 - схема блока задания фазных токов; на фиг.3 выходная характеристика функционального преобразователя. Электропривод содержит двигатель 1, датчик 2 положения, подключенный входом к выходу источника 3 синусоидального напряжения, вход которого подключен к генератору 4 опорной частоты, блок 5 задания фазных токов, выходы которого подключены через усилитель 6 фазных токов к фазным обмоткам двигателя 1, постоянные запоминающие устройства 7, 8, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока 5 задания фазных токов, преобразователь 9 приращений периода в код, который подключен первым входом к выходу датчика 2 положения, а вторым входом к генератору 4 опорной частоты, накопитель 10 приращений, который подключен информационным входом к выходу преобразователя 9 приращений периода в код, а запрещающим входом к дополнительному выходу датчика 2 положения, двухвходовой сумматор 11, который подключен первым входом к выходу накопителя 10 приращений, вторым входом к блоку 12 задания начальной фазы, а выходом через функциональный преобразователь 13 к объединенным входам постоянных запоминающих устройств 7, 8. Блок 5 задания фазных токов может быть выполнен по схеме, содержащей задатчики активной и реактивной составляющих тока двигателя-, цифроаналоговые преобразователи и координатный преобразователь. В простейшем случае блок 5 задания фазных токов содержит умножающие цифроаналоговые преобразователи 14, 15, подключенные аналоговыми входами к выходу задатчика 16 тока двигателя. Входами и выходами блока 5 являются соответственно цифровые входы и выходы цифроаналоговых преобразователей 14, 15. В качестве датчика 2 положения используется индуктосин в режиме фазовращателя совместно с конечным выключателем в качестве датчика начального положения ротора двигателя. Преобразователь 9 приращений периода в код может быть построен на основе сравнения периодов входного и выходного сигналов датчика 2 положения с использованием элементов цифровой техники. Функциональный преобразователь 13 может быть построен с использованием постоянных запоминающих устройств и цифровых арифметических блоков. Электропривод работает следующим образом. В качестве управляемого двигателя 1 рассмотрим двухфазную синхронную машину с возбуждением от постоянных магнитов. При управлении -фазным двигателем усилитель 6 фазных токов выполняют -фазным с преобразователем числа фаз на входе. В соответствии с частотно-токовым управлением фазные обмотки двигателя 1 необходимо запитывать токами, где - угол повороте ротора двигателя, - некоторый дополнительный поворота, - амплитуда токов, угол - коэффициент электрической редукции двигателя. Под коэффициентом электрической редукции двигателя понимается отношение частот вращения поля статора и ротора. Токи управления (1) вырабатывают с помощью усилителя 6, который преобразует задания фазных токов в виде напряжений в пропорциональные им ток в фазных обмотках двигателя 1. Задания фазных токов вырабатывают следующим образом. Входную цепь датчика 2 положения запитывают синусоидальным напряжением с частотой С выхода датчика 2 снимают сигнал где - амплитуда и фаза сигнала, - коэффициент электрической редукции датчика. Под коэффициентом электрической редукции датчика понимается отношение приращения фазы в его выходном сигнале к соответствующему приращению угла поворота ротора датчика. Выходной сигнал (2) датчика 2 положения принимает нулевые значения когда имеет место равенство которое наступает в моменты времени где - значение фазы выходного сигнала датчика в моменты времени Отрезок времени является периодом выходного сигнала датчика 2 положения. Поскольку период входного напряжения датчика 2 равен где то согласно (2), (3) - значение угла поворота ротора двигателя в моменты времени Выходной сигнал датчика 2 положения поступает на первый вход преобразователя 9 приращений периода в код, на второй вход которого приходит сигнал с частотой, пропорциональной частоте входного напряжения датчика 2. Преобразователь 9 сравнивает периоды входного и выходного сигналов датчика 2 положения, определяют приращение каждого периода выходного сигнала датчика 2 и с учетом коэффициента электрической редукции датчика получает на выходе сигнал приращения угла поворота ротора двигателя 1 за период выходного сигнала датчика Полученный сигнал поступает на вход накопителя 10 приращений, который предназначен для определения полного угла поворота ротора двигателя 1 относительно начального положения. При установке ротора двигателя 1 в начальное положение на дополнительном выходе датчика 2 положения вырабатывают сигнал, который осуществляет сброс накопителя 10 и разрешает суммирование приращений угла поворота ротора двигателя 1. На выходе накопителя 10 приращений получают сигнал Двухвходовой сумматор 22 учитывает задание начальной фазы токов. Его выходной сигнал, равный поступает на функционального преобразователя 13. Функциональный преобразователь преобразует входной сигнал периодически изменяющийся код вход 13 в если где На фиг.3 представлена выходная характеристика функционального преобразователя 13. Выходной сигнал преобразователя 11 является входным сигналом для постоянных запоминающих устройств 7, 8. В постоянные запоминающие устройства 7, 8 предварительно записаны значения функций синуса и косинуса соответственно. Входному коду соответствуют выходные сигналы: и которые поступают на цифровые входы умножающих цифроаналоговых преобразователей 14, 15. На объединенные аналоговые входы цифроаналоговых преобразователей 14, 15 с задатчика 16 тока приходит сигнал пропорциональный требуемой амплитуде фазных токов двигателя. На выходах цифроаналоговых преобразователей 14, 15 получают напряжения, которые с достаточной степенью точности аппроксимируют требуемые задания фазных токов Предлагаемое формирование заданий фазных токов двигателя при его частотно-токовом управлении не накладывает каких-либо ограничений на коэффициенты электрической редукции датчика положения и управляемого двигателя, а также на их соотношение.
ДивитисяДодаткова інформація
Назва патенту англійськоюFrequency-current control-electric drive
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюЭлектропривод с частотно-токовым управлением
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02P 27/04
Мітки: управлінням, електропривод, частотно-струмовим
Код посилання
<a href="https://ua.patents.su/3-15246-elektroprivod-z-chastotno-strumovim-upravlinnyam.html" target="_blank" rel="follow" title="База патентів України">Електропривод з частотно-струмовим управлінням</a>
Елекропривід з частотно-струмовим управлінням
Номер патенту: 2925
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: управлінням, частотно-струмовим, елекропривід
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, фазочувствительный выпрямитель, связанный выходом через усилитель фазных токов с фазными обмотками синхронного двигателя, генератор синусоидальных напряжений, выходом подключенный к входным обмоткам фазовращателя, управляемый фазосмещающий блок, подключенный сигнальным входом к выходу...
Електропривод з частотно-струмовим керуванням
Номер патенту: 3188
Опубліковано: 26.12.1994
Автори: Попов Віктор Іванович, Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 7/18
Мітки: електропривод, керуванням, частотно-струмовим
Формула / Реферат:
1. Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, ротор которого механически соединен с ротором фазовращателя, вход фазовращателя соединен с первым выходом задающего генератора, второй вход которого соединен с первым входом фазочувствительного выпрямителя, второй вход которого соединен с выходом делителя частоты, выход фазовращателя соединен с входом формирователя коротких импульсов, выход которого соединен с...
Елекропривод з частотно-струмовим керуванням
Номер патенту: 3185
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: керуванням, частотно-струмовим, елекропривод
Формула / Реферат:
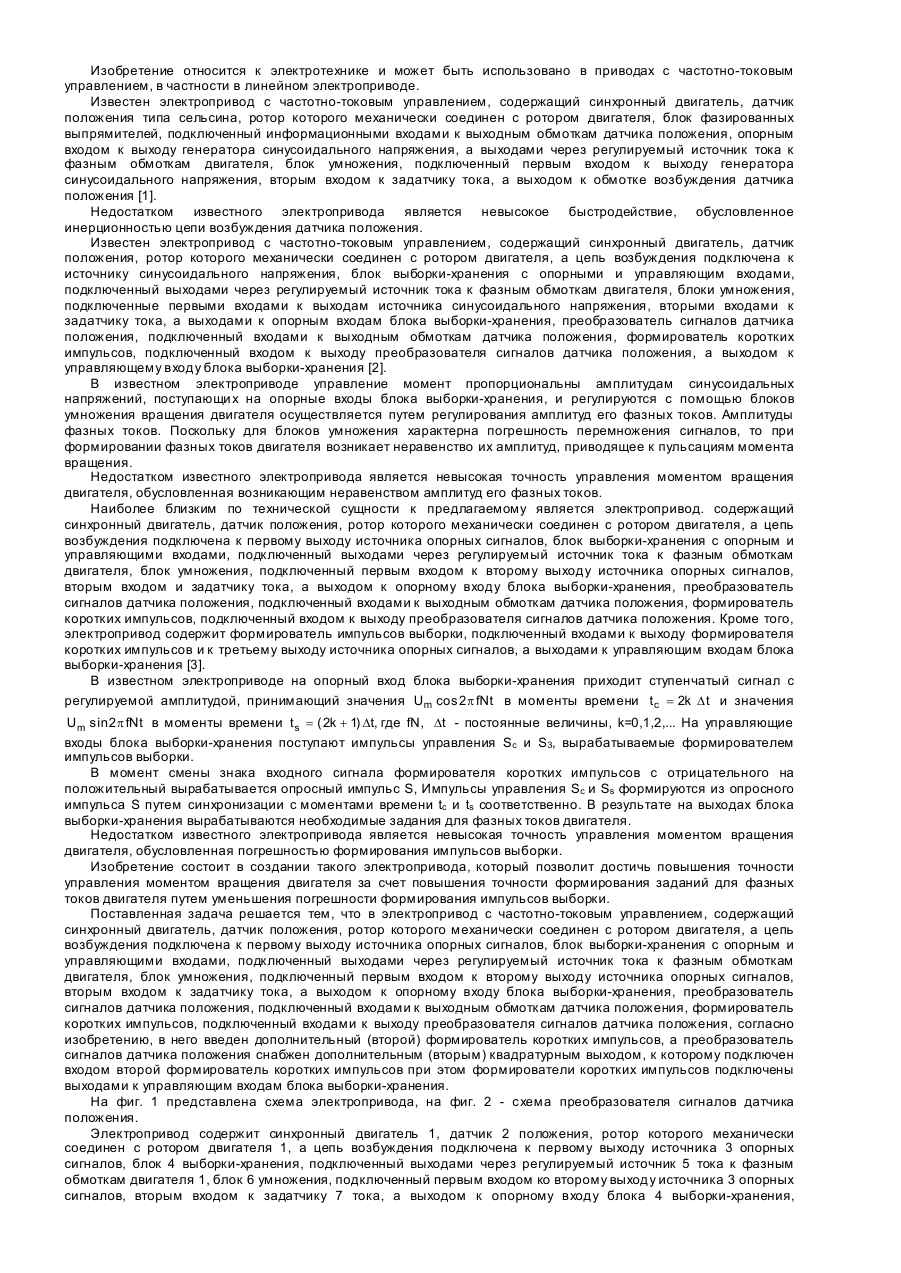
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных...
Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Лукашенко Андрій Германович, Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: електропривід, керуванням, частотно-струмовим
Формула / Реферат:
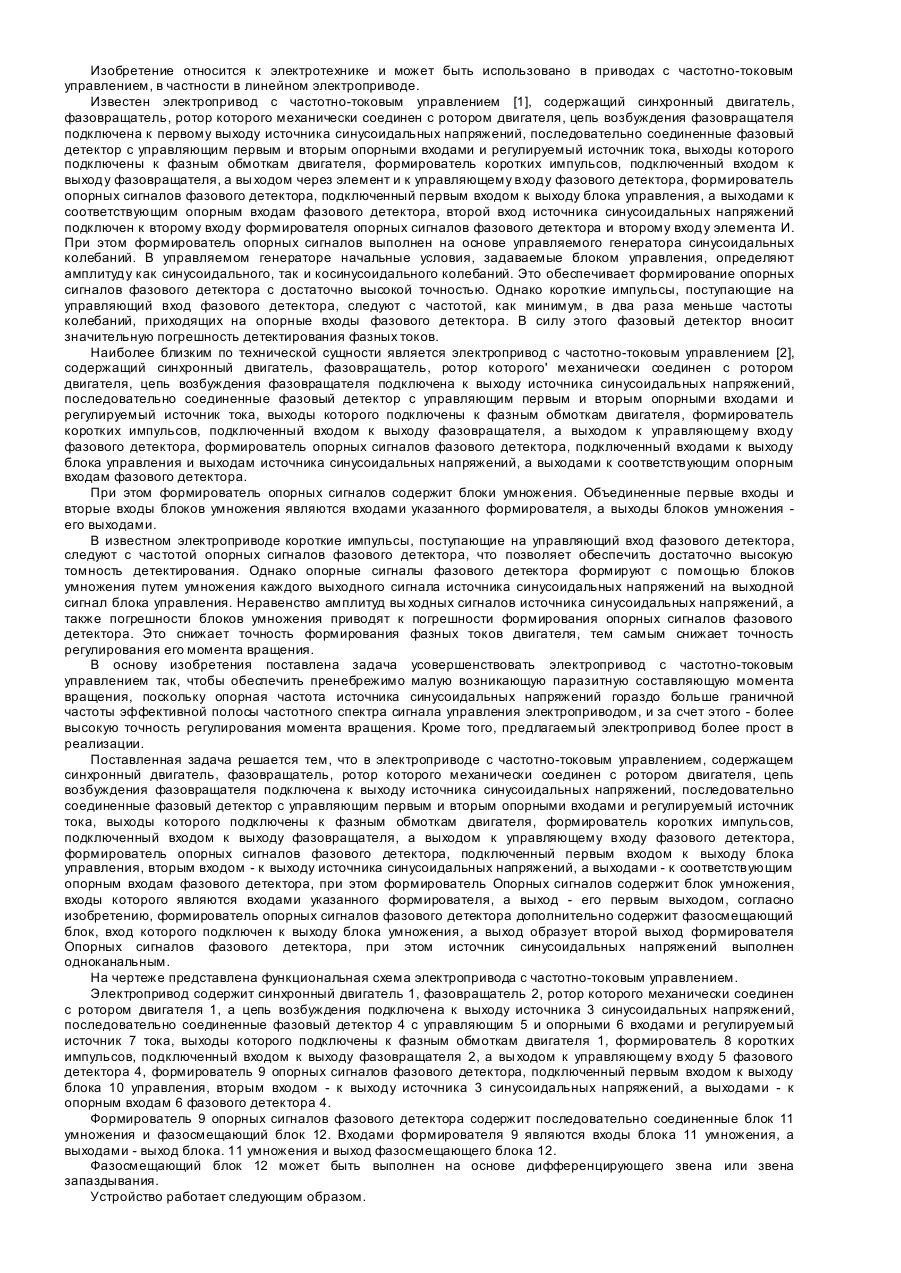
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких...
Частотно-регульований асинхроний електропривод
Номер патенту: 8583
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович
МПК: H02P 27/04
Мітки: частотно-регульований, електропривод, асинхроний
Формула / Реферат:
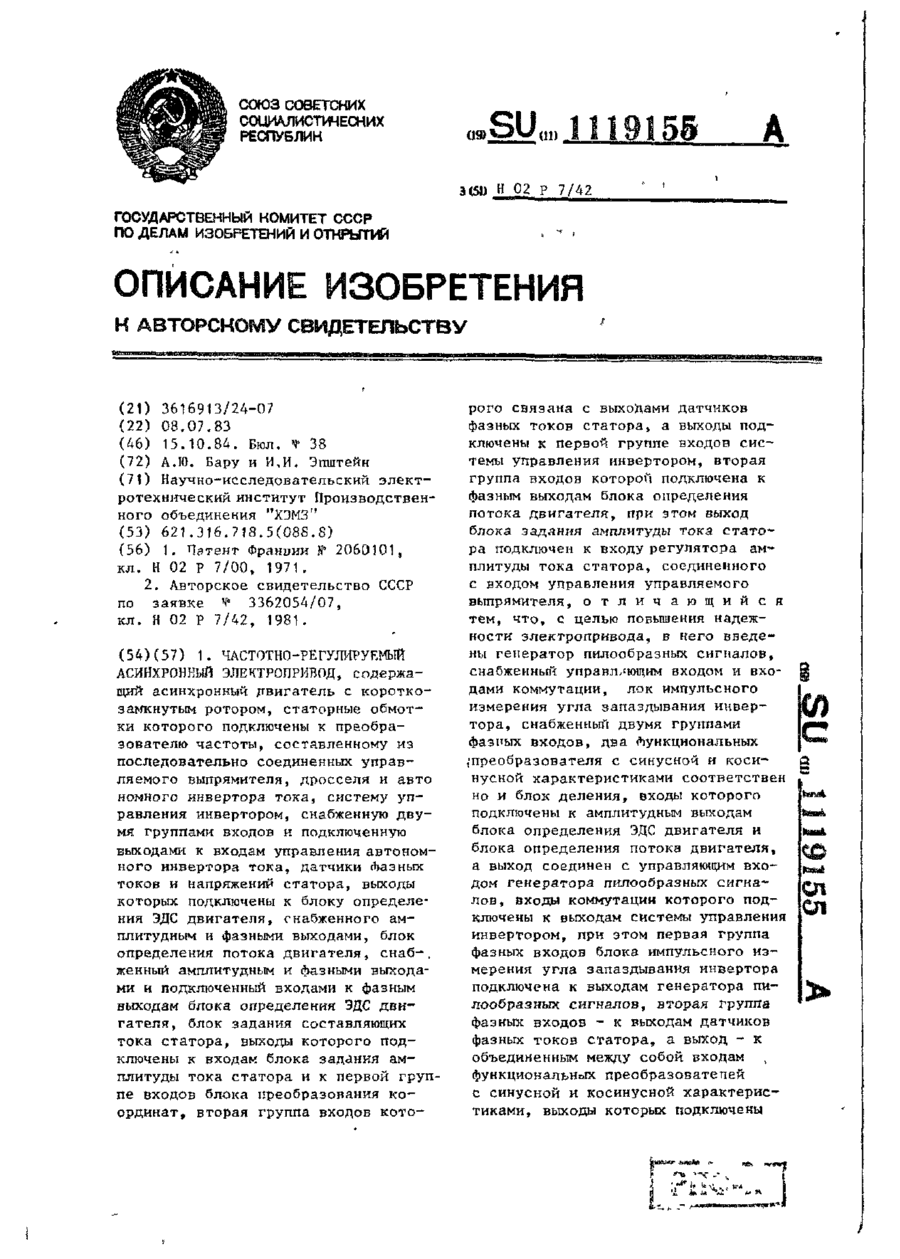
1. Частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики фазных...
Попередній патент: Пристрій для вимірювання переміщувань об’єкта
Наступний патент: Вітродвигун з вертикальною віссю обертання
Випадковий патент: Спосіб одержання позитивного контролю імуноферментних тест-систем, призначених для визначення антитіл до збудників torcн-інфекцій