Тренажер – ортопедичний тредбан
Номер патенту: 17237
Опубліковано: 15.09.2006
Автори: Ніколайчук Ірина Іванівна, Сліпенька Олена Петрівна, Ященко Олексій Олександрович, Коц Іван Васильович

Формула / Реферат
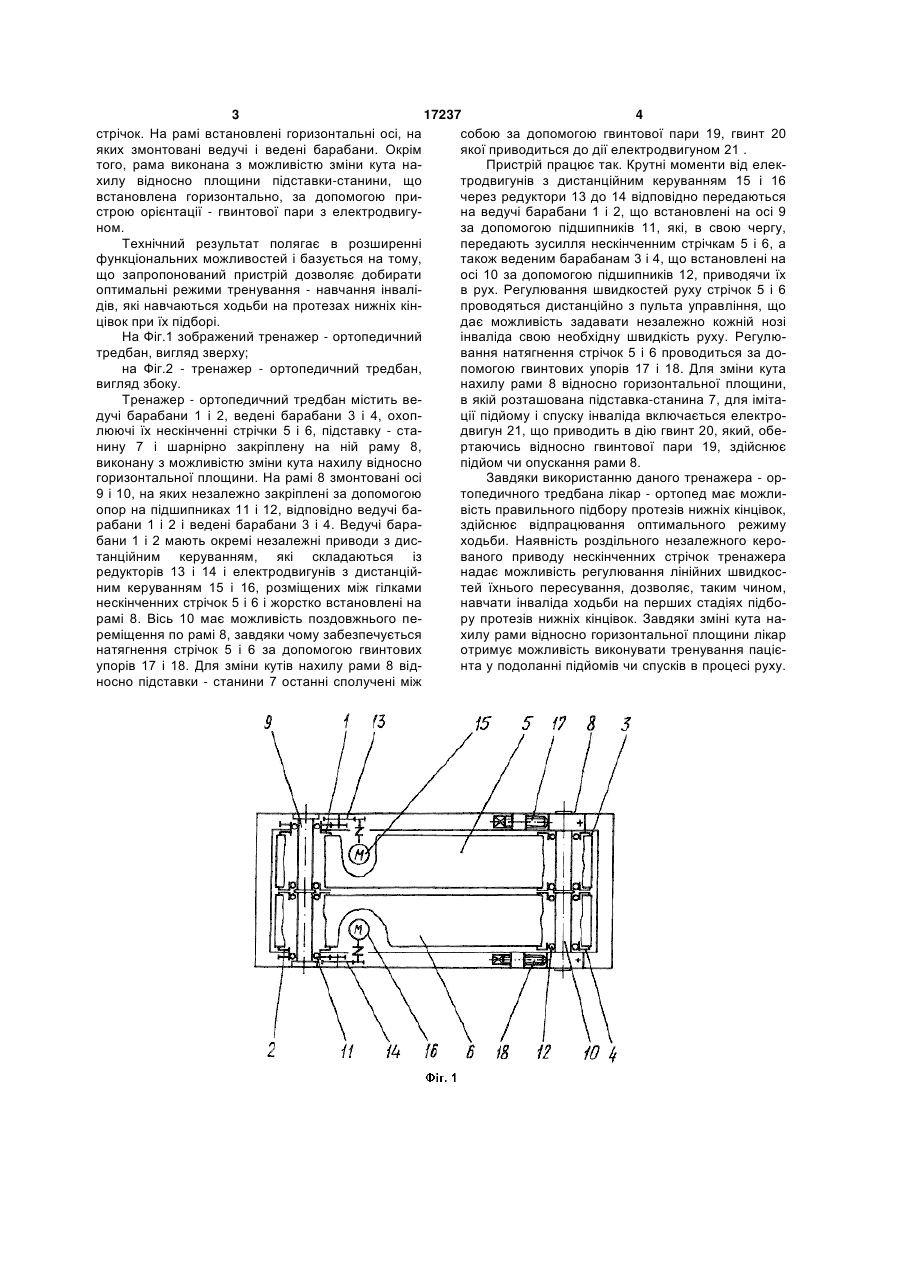
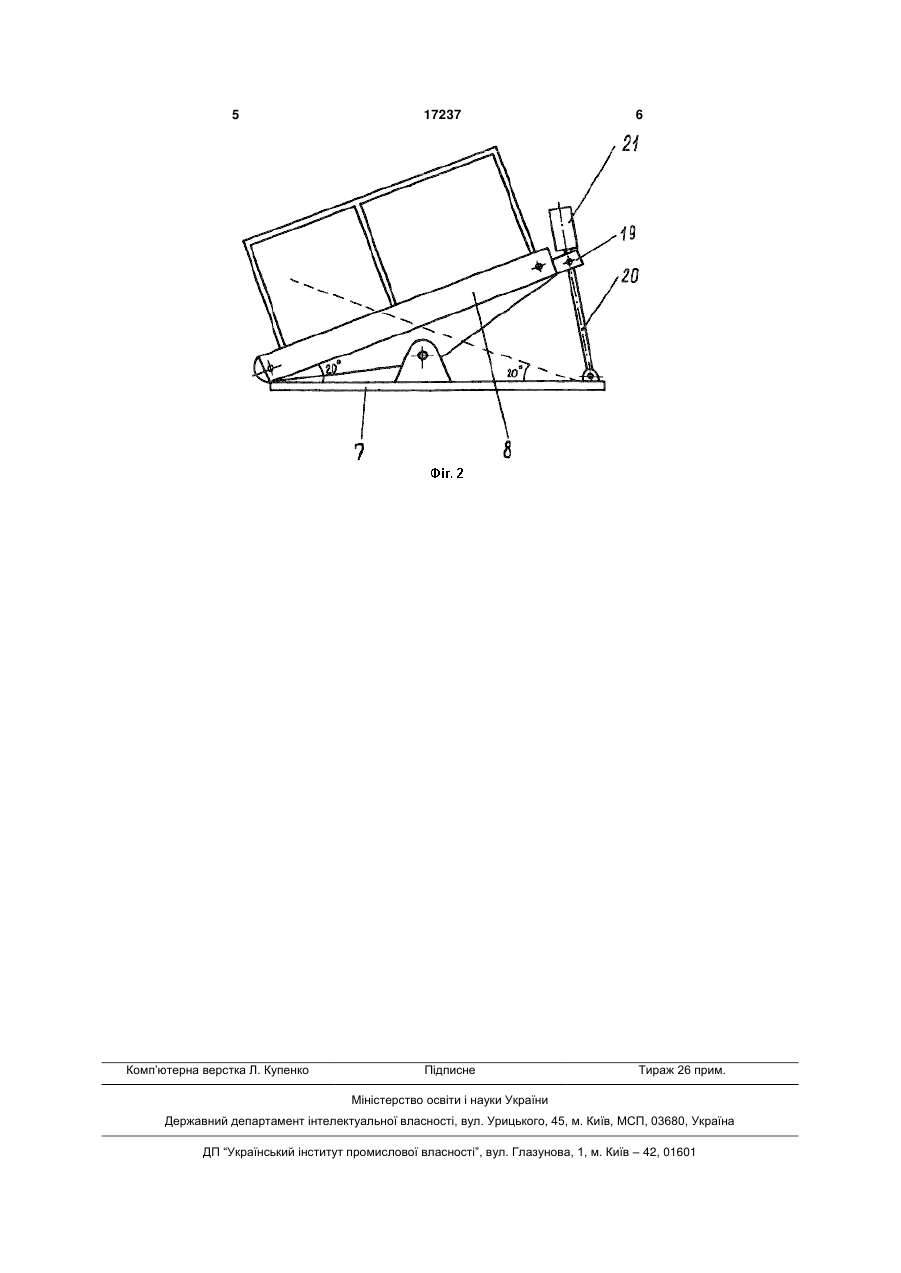
Тренажер - ортопедичний тредбан, що включає підставку-станину, на якій змонтовані на рамі ведучий і ведений барабани з охоплюючою їх нескінченною стрічкою і кінематично зв'язаний з ведучим барабаном за допомогою механічної передачі електродвигун, встановлений між гілками стрічки, який відрізняється тим, що в нього введено другий ведучий барабан і другий ведений барабан, які разом з першим ведучим барабаном і першим веденим барабаном виконано здвоєними з охоплюючими їх нескінченними стрічками, що натягнені гвинтовими упорами, кожний з ведучих барабанів має незалежний привід, який виконано за допомогою проміжної механічної передачі та електродвигуна з дистанційним керуванням, причому незалежні приводи встановлені між гілками стрічок, а на рамі встановлені горизонтальні осі, на яких змонтовані ведучі і ведені барабани, окрім того, рама виконана з можливістю зміни кута нахилу відносно площини підставки-станини, що встановлена горизонтально, за допомогою пристрою орієнтації - гвинтової пари з електродвигуном.
Текст
Тренажер - ортопедичний тредбан, що включає підставку-станину, на якій змонтовані на рамі ведучий і ведений барабани з охоплюючою їх нескінченною стрічкою і кінематично зв'язаний з ведучим барабаном за допомогою механічної передачі електродвигун, встановлений між гілками стрічки, який відрізняється тим, що в нього вве 3 17237 4 стрічок. На рамі встановлені горизонтальні осі, на собою за допомогою гвинтової пари 19, гвинт 20 яких змонтовані ведучі і ведені барабани. Окрім якої приводиться до дії електродвигуном 21 . того, рама виконана з можливістю зміни кута наПристрій працює так. Крутні моменти від елекхилу відносно площини підставки-станини, що тродвигунів з дистанційним керуванням 15 і 16 встановлена горизонтально, за допомогою причерез редуктори 13 до 14 відповідно передаються строю орієнтації - гвинтової пари з електродвигуна ведучі барабани 1 і 2, що встановлені на осі 9 ном. за допомогою підшипників 11, які, в свою чергу, Технічний результат полягає в розширенні передають зусилля нескінченним стрічкам 5 і 6, а функціональних можливостей і базується на тому, також веденим барабанам 3 і 4, що встановлені на що запропонований пристрій дозволяє добирати осі 10 за допомогою підшипників 12, приводячи їх оптимальні режими тренування - навчання інвалів рух. Регулювання швидкостей руху стрічок 5 і 6 дів, які навчаються ходьби на протезах нижніх кінпроводяться дистанційно з пульта управління, що цівок при їх підборі. дає можливість задавати незалежно кожній нозі На Фіг.1 зображений тренажер - ортопедичний інваліда свою необхідну швидкість руху. Регулютредбан, вигляд зверху; вання натягнення стрічок 5 і 6 проводиться за дона Фіг.2 - тренажер - ортопедичний тредбан, помогою гвинтових упорів 17 і 18. Для зміни кута вигляд збоку. нахилу рами 8 відносно горизонтальної площини, Тренажер - ортопедичний тредбан містить вев якій розташована підставка-станина 7, для імітадучі барабани 1 і 2, ведені барабани 3 і 4, охопції підйому і спуску інваліда включається електролюючі їх нескінченні стрічки 5 і 6, підставку - стадвигун 21, що приводить в дію гвинт 20, який, обенину 7 і шарнірно закріплену на ній раму 8, ртаючись відносно гвинтової пари 19, здійснює виконану з можливістю зміни кута нахилу відносно підйом чи опускання рами 8. горизонтальної площини. На рамі 8 змонтовані осі Завдяки використанню даного тренажера - ор9 і 10, на яких незалежно закріплені за допомогою топедичного тредбана лікар - ортопед має можлиопор на підшипниках 11 і 12, відповідно ведучі бавість правильного підбору протезів нижніх кінцівок, рабани 1 і 2 і ведені барабани 3 і 4. Ведучі бараздійснює відпрацювання оптимального режиму бани 1 і 2 мають окремі незалежні приводи з дисходьби. Наявність роздільного незалежного керотанційним керуванням, які складаються із ваного приводу нескінченних стрічок тренажера редукторів 13 і 14 і електродвигунів з дистанційнадає можливість регулювання лінійних швидкосним керуванням 15 і 16, розміщених між гілками тей їхнього пересування, дозволяє, таким чином, нескінченних стрічок 5 і 6 і жорстко встановлені на навчати інваліда ходьби на перших стадіях підборамі 8. Вісь 10 має можливість поздовжнього перу протезів нижніх кінцівок. Завдяки зміні кута нареміщення по рамі 8, завдяки чому забезпечується хилу рами відносно горизонтальної площини лікар натягнення стрічок 5 і 6 за допомогою гвинтових отримує можливість виконувати тренування пацієупорів 17 і 18. Для зміни кутів нахилу рами 8 віднта у подоланні підйомів чи спусків в процесі руху. носно підставки - станини 7 останні сполучені між 5 Комп’ютерна верстка Л. Купенко 17237 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTraining device orthopedic treadban
Автори англійськоюKots Ivan Vasyliovych
Назва патенту російськоюТренажер ортопедический тредбан
Автори російськоюКоц Иван Васильевич
МПК / Мітки
МПК: A63B 23/04
Мітки: тредбан, тренажер, ортопедичний
Код посилання
<a href="https://ua.patents.su/3-17237-trenazher-ortopedichnijj-tredban.html" target="_blank" rel="follow" title="База патентів України">Тренажер – ортопедичний тредбан</a>
Пристрій ортопедичний “данстеф”
Номер патенту: 35359
Опубліковано: 15.03.2001
Автор: Гофельд Олександр Матвійович
МПК: A63B 22/06, A61H 1/00
Мітки: ортопедичний, данстеф, пристрій
Формула / Реферат:
Пристрій ортопедичний, що має установлену на основі амортизуючу опору-сидіння та установлену на стійці амортизуючу опору для гомілок та колінних суглобів, який відрізняється тим, що має дві амортизуючі опори-сидіння, кожна з яких установлена на основі за допомогою телескопічного механізму та механізму переміщення та зміни кута нахилу та дві амортизуючі опори для гомілок та колінних суглобів, кожна з яких установлена на стійці за допомогою...
Ортопедичний кутомір
Номер патенту: 44643
Опубліковано: 15.02.2002
Автор: Шевчук Сергій Вікторович
МПК: A61B 5/103
Мітки: ортопедичний, кутомір
Формула / Реферат:
Ортопедичний кутомір, що включає корпус, дугову шкалу, покажчик у вигляді кульки, розміщеної в замкнутому каналі корпусу та фіксатор, який відрізняється тим, що тильна поверхня і поверхня зовнішнього периметру корпусу покриті липкою тканиною.
Ортопедичний кутомір
Номер патенту: 44644
Опубліковано: 15.02.2002
Автор: Шевчук Сергій Вікторович
МПК: A61B 5/103
Мітки: кутомір, ортопедичний
Формула / Реферат:
Ортопедичний кутомір, що включав корпус, дугову шкалу, покажчик і фіксатор, який відрізняється тим, що його корпус виконано з двох куль різного діаметра, вставлених одна в одну і з'єднаних стержнями, в вільний простір між ними введена рідина, а зовнішня поверхня фіксатора покрита липкою тканиною.
Реабілітаційний тренажер

Номер патенту: 50961
Опубліковано: 15.03.2006
Автори: Гасюк Юрій Васильович, Калашніков Микола Миколайович
МПК: A63B 23/02, A61H 1/00
Мітки: тренажер, реабілітаційний
Формула / Реферат:
Реабілітаційний тренажер, що містить раму, на якій змонтована трособлочна система з педалями і рукоятками, регулятор навантаження, який відрізняється тим, що трособлочна система містить важелі, закріплені своїми центральними частинами у центрі рами з можливістю часткового радіального повороту, педалі приєднані до нижніх кінців важелів, до верхніх кінців важелів прикріплені тросики, що обгинають встановлені вверху на рамі передні блоки і...
Силовий тренажер

Номер патенту: 9949
Опубліковано: 17.10.2005
Автор: Барабаш Валентин Радіонович
МПК: A63B 21/00, A63B 21/06
Формула / Реферат:
Силовий тренажер містить два незалежних робочих пристрої, корпус, виготовлений як модель "стілець", який відрізняється тим, що має робочий важіль, закріплений шарнірно на розбірній рамі під кутом 40°, яка фіксується на корпусі, з можливістю прямолінійного руху в прямому і зворотному напрямках, з можливістю розтягування гумових кілець з камери легкового автомобіля, закріплених на пальцях робочого важеля і рами.
Попередній патент: Спосіб гемороідектомії
Наступний патент: Установка для сушіння рідких матеріалів
Випадковий патент: Пристрій для виготовлення розгорток паперово-картонного паковання і етикеток