Маніпулятор для складання візка вантажного вагона
Номер патенту: 20017
Опубліковано: 15.01.2007
Автори: Клименко Ірина Володимирівна, Панасенко Віталій Якович
Формула / Реферат
Маніпулятор для складання візка вантажного вагона, що має змонтовані на рухомій платформі механізми захвату та переміщення фрикційних клинів, механізм переміщення пружин ресорного комплекту візка, причому вказаний механізм включає в себе розміщену на корпусі площадку, зв'язану з приводом її зворотно-поступального переміщення в зону розташування пружин, положення яких фіксується приливками у формі зрізаного конуса, а по висоті приливки вищі, ніж упори, розташовані на зовнішній стороні нижнього поясу боковини, який відрізняється тим, що площадка виконана з прорізами по ширині приливків та по довжині її переміщення, по кількості та в місцях розташування указаних приливків на нижньому поясі боковини, причому товщина площадки менша різниці висот між упорами та приливками, утворені зубці площадки закруглені на своїх кінцях в горизонтальній площині, а переріз їх по всій довжині має форму рівнобічної трапеції.
Текст
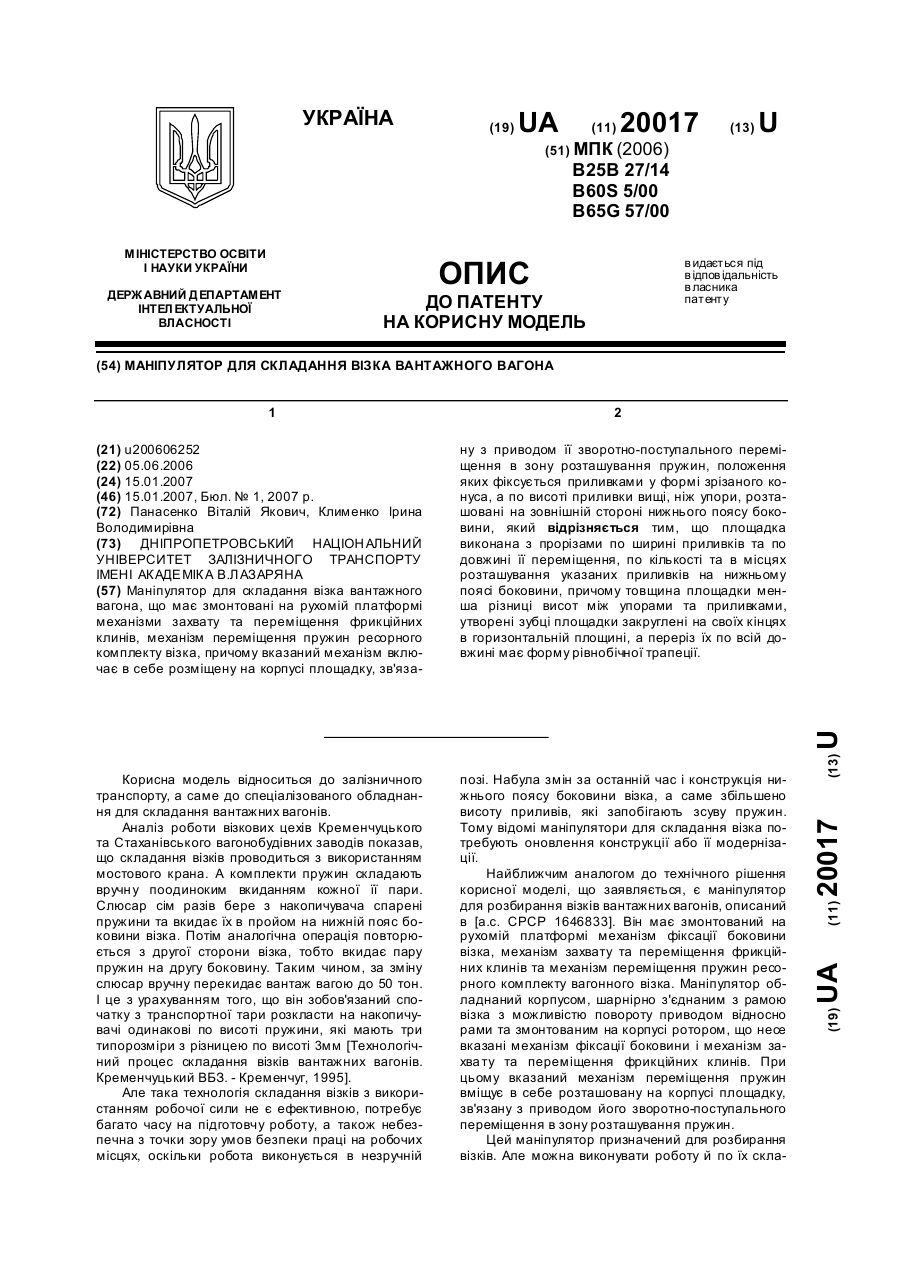
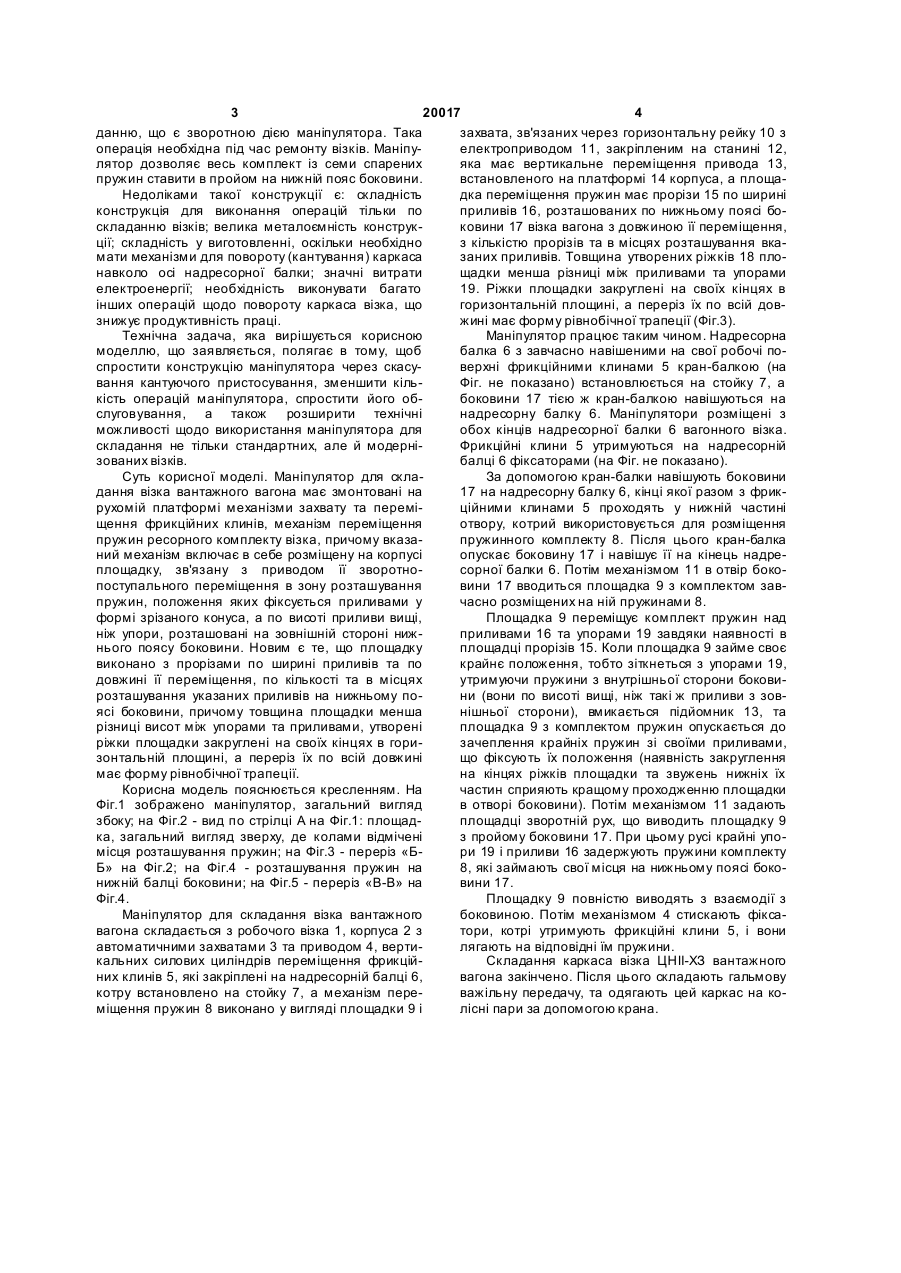
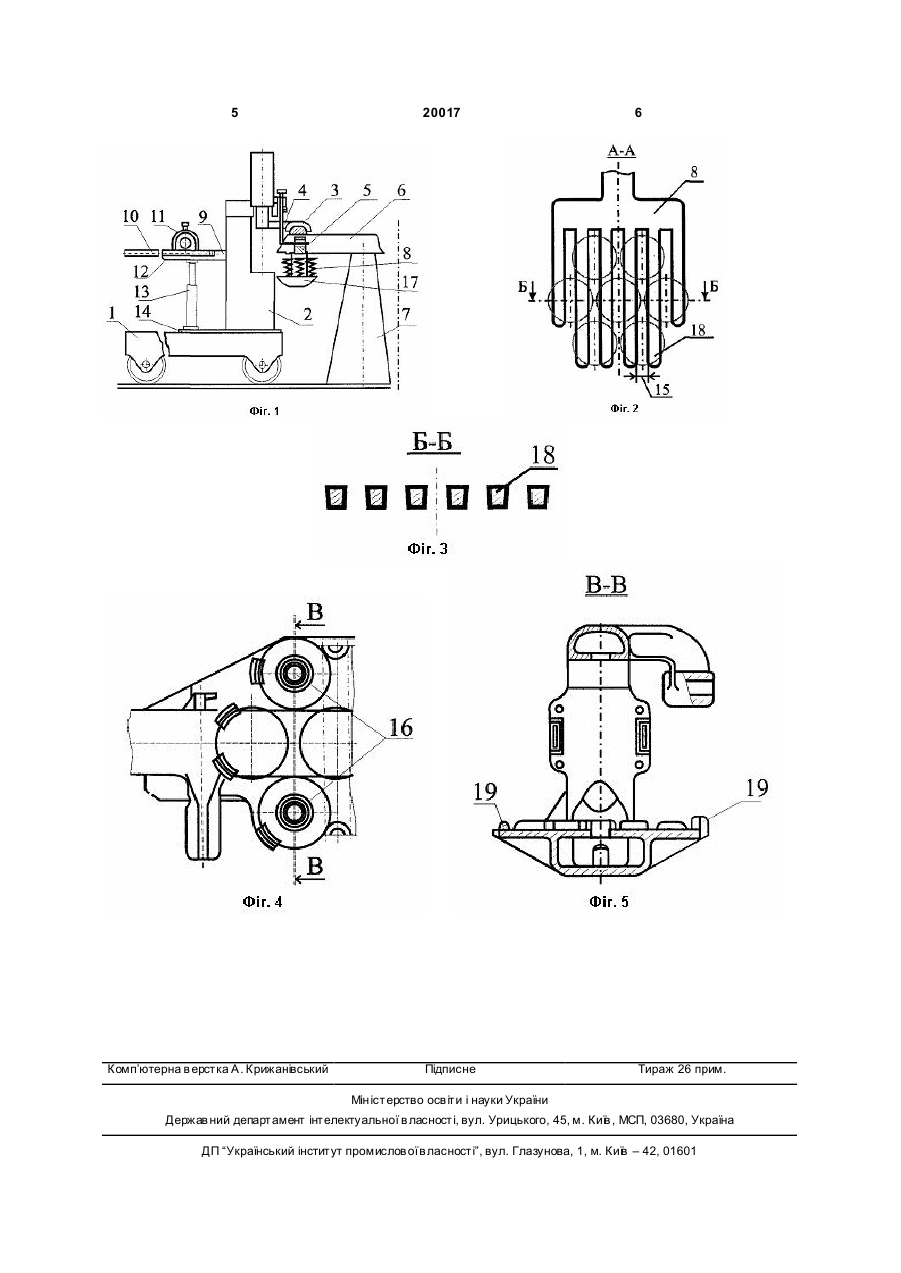
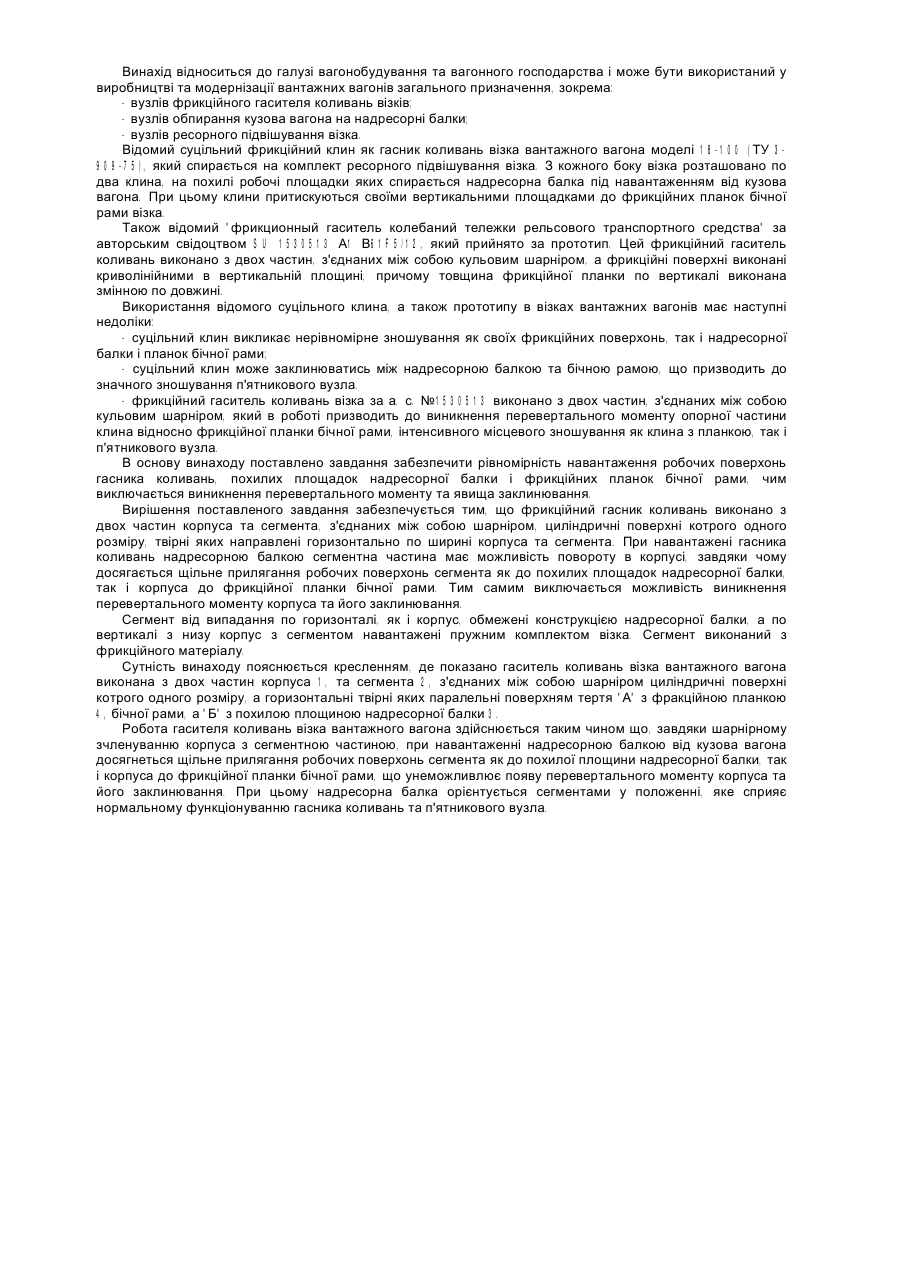
Маніпулятор для складання візка вантажного вагона, що має змонтовані на рухомій платформі механізми захвату та переміщення фрикційних клинів, механізм переміщення пружин ресорного комплекту візка, причому вказаний механізм включає в себе розміщену на корпусі площадку, зв'яза 3 20017 4 данню, що є зворотною дією маніпулятора. Така захвата, зв'язаних через горизонтальну рейку 10 з операція необхідна під час ремонту візків. Маніпуелектроприводом 11, закріпленим на станині 12, лятор дозволяє весь комплект із семи спарених яка має вертикальне переміщення привода 13, пружин ставити в пройом на нижній пояс боковини. встановленого на платформі 14 корпуса, а площаНедоліками такої конструкції є: складність дка переміщення пружин має прорізи 15 по ширині конструкція для виконання операцій тільки по приливів 16, розташованих по нижньому поясі боскладанню візків; велика металоємність конструкковини 17 візка вагона з довжиною її переміщення, ції; складність у виготовленні, оскільки необхідно з кількістю прорізів та в місцях розташування вкамати механізми для повороту (кантування) каркаса заних приливів. Товщина утворених ріжків 18 плонавколо осі надресорної балки; значні витрати щадки менша різниці між приливами та упорами електроенергії; необхідність виконувати багато 19. Ріжки площадки закруглені на своїх кінцях в інших операцій щодо повороту каркаса візка, що горизонтальній площині, а переріз їх по всій довзнижує продуктивність праці. жині має форму рівнобічної трапеції (Фіг.3). Технічна задача, яка вирішується корисною Маніпулятор працює таким чином. Надресорна моделлю, що заявляється, полягає в тому, щоб балка 6 з завчасно навішеними на свої робочі поспростити конструкцію маніпулятора через скасуверхні фрикційними клинами 5 кран-балкою (на вання кантуючого пристосування, зменшити кільФіг. не показано) встановлюється на стойку 7, а кість операцій маніпулятора, спростити його оббоковини 17 тією ж кран-балкою навішуються на слуговування, а також розширити технічні надресорну балку 6. Маніпулятори розміщені з можливості щодо використання маніпулятора для обох кінців надресорної балки 6 вагонного візка. складання не тільки стандартних, але й модерніФрикційні клини 5 утримуються на надресорній зованих візків. балці 6 фіксаторами (на Фіг. не показано). Суть корисної моделі. Маніпулятор для склаЗа допомогою кран-балки навішують боковини дання візка вантажного вагона має змонтовані на 17 на надресорну балку 6, кінці якої разом з фрикрухомій платформі механізми захвату та переміційними клинами 5 проходять у нижній частині щення фрикційних клинів, механізм переміщення отвору, котрий використовується для розміщення пружин ресорного комплекту візка, причому вказапружинного комплекту 8. Після цього кран-балка ний механізм включає в себе розміщену на корпусі опускає боковину 17 і навішує її на кінець надреплощадку, зв'язану з приводом її зворотносорної балки 6. Потім механізмом 11 в отвір бокопоступального переміщення в зону розташування вини 17 вводиться площадка 9 з комплектом завпружин, положення яких фіксується приливами у часно розміщених на ній пружинами 8. формі зрізаного конуса, а по висоті приливи вищі, Площадка 9 переміщує комплект пружин над ніж упори, розташовані на зовнішній стороні нижприливами 16 та упорами 19 завдяки наявності в нього поясу боковини. Новим є те, що площадку площадці прорізів 15. Коли площадка 9 займе своє виконано з прорізами по ширині приливів та по крайнє положення, тобто зіткнеться з упорами 19, довжині її переміщення, по кількості та в місцях утримуючи пружини з внутрішньої сторони боковирозташування указаних приливів на нижньому пони (вони по висоті вищі, ніж такі ж приливи з зовясі боковини, причому товщина площадки менша нішньої сторони), вмикається підйомник 13, та різниці висот між упорами та приливами, утворені площадка 9 з комплектом пружин опускається до ріжки площадки закруглені на своїх кінцях в горизачеплення крайніх пружин зі своїми приливами, зонтальній площині, а переріз їх по всій довжині що фіксують їх положення (наявність закруглення має форму рівнобічної трапеції. на кінцях ріжків площадки та звужень нижніх їх Корисна модель пояснюється кресленням. На частин сприяють кращому проходженню площадки Фіг.1 зображено маніпулятор, загальний вигляд в отворі боковини). Потім механізмом 11 задають збоку; на Фіг.2 - вид по стрілці А на Фіг.1: площадплощадці зворотній рух, що виводить площадку 9 ка, загальний вигляд зверху, де колами відмічені з пройому боковини 17. При цьому русі крайні упомісця розташування пружин; на Фіг.3 - переріз «Бри 19 і приливи 16 задержують пружини комплекту Б» на Фіг.2; на Фіг.4 - розташування пружин на 8, які займають свої місця на нижньому поясі боконижній балці боковини; на Фіг.5 - переріз «В-В» на вини 17. Фіг.4. Площадку 9 повністю виводять з взаємодії з Маніпулятор для складання візка вантажного боковиною. Потім механізмом 4 стискають фіксавагона складається з робочого візка 1, корпуса 2 з тори, котрі утримують фрикційні клини 5, і вони автоматичними захватами 3 та приводом 4, вертилягають на відповідні їм пружини. кальних силових циліндрів переміщення фрикційСкладання каркаса візка ЦНІІ-ХЗ вантажного них клинів 5, які закріплені на надресорній балці 6, вагона закінчено. Після цього складають гальмову котру встановлено на стойку 7, а механізм переважільну передачу, та одягають цей каркас на коміщення пружин 8 виконано у вигляді площадки 9 і лісні пари за допомогою крана. 5 Комп’ютерна в ерстка А. Крижанівський 20017 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator for assembling of freight-car truck
Автори англійськоюPanasenko Vitalii Yakovych, Klymenko Iryna Volodymyrivna
Назва патенту російськоюМанипулятор для сборки тележки грузового вагона
Автори російськоюПанасенко Виталий Яковлевич, Клименко Ирина Владимировна
МПК / Мітки
МПК: B65G 57/00, B25B 27/14, B60S 5/00
Мітки: маніпулятор, вагона, візка, вантажного, складання
Код посилання
<a href="https://ua.patents.su/3-20017-manipulyator-dlya-skladannya-vizka-vantazhnogo-vagona.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для складання візка вантажного вагона</a>
Гаситель коливань візка вантажного вагона
Номер патенту: 66942
Опубліковано: 15.06.2004
Автори: Дьомін Юрій Васильович, Кочмала Григорій Данилович
МПК: B61F 5/02
Мітки: коливань, вагона, вантажного, візка, гаситель
Формула / Реферат:
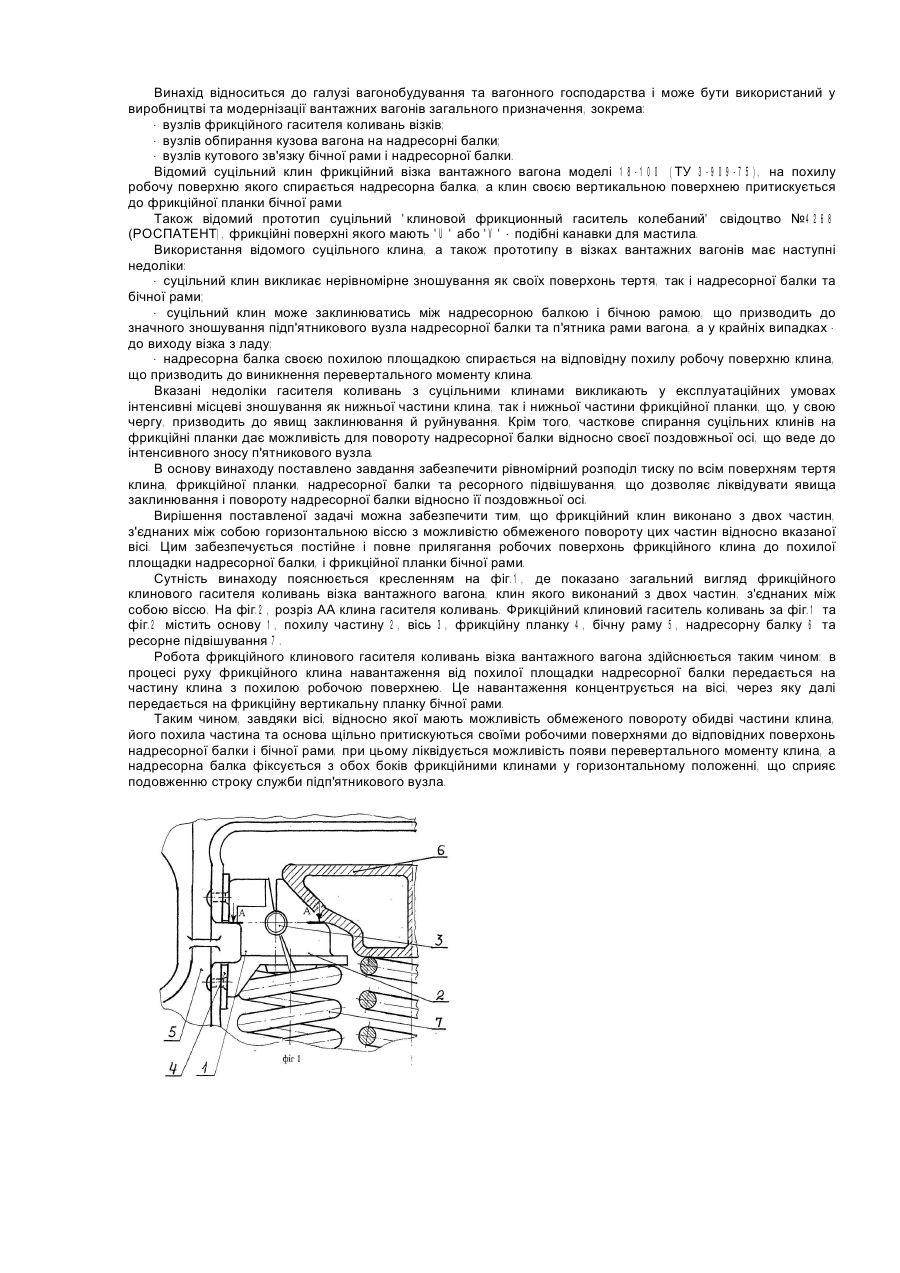
Гаситель коливань візка вантажного вагона, що складається з двох фрикційних клинів, встановлених на пружних елементах ресорного підвішування візка та виконаних з можливістю взаємодії з похилими частинами надресорної балки і фрикційними планками бічної рами візка, який відрізняється тим, що кожний фрикційний клин гасителя коливань виконано з двох частин - корпуса та сегмента, шарнірно з'єднаних між собою, при цьому циліндрична поверхня, за...
Фрикційний клиновий гаситель коливань візка вантажного вагона
Номер патенту: 69469
Опубліковано: 15.09.2004
Автори: Кочмала Григорій Данилович, Дьомін Юрій Васильович
Мітки: візка, коливань, гаситель, вагона, вантажного, фрикційний, клиновий
Формула / Реферат:
Фрикційний клиновий гаситель коливань візка вантажного вагона, який містить клин, що встановлений на пружинах ресорного підвішування та складається з двох частин, причому робоча поверхня однієї частини клина утворює пару тертя з фрикційною планкою бічної рами, а робоча поверхня другої частини клина утворює пару тертя з похилою поверхнею надресорної балки, який відрізняється тим, що частини клина з'єднані між собою горизонтально розташованою...
Боковина рами візка залізничного вантажного вагона
Номер патенту: 8939
Опубліковано: 15.08.2005
Автори: Дурандін Віктор Федорович, Гончаров Олексій Володимирович, Карпенко Юрій Миколайович, Пройдаков Юрій Васильович, Тимченко Костянтин Вікторович, Мирний Олександр Борисович
МПК: B61F 5/52
Мітки: боковина, вагона, вантажного, залізничного, візка, рами
Формула / Реферат:
1. Боковина рами візка залізничного вантажного вагона у вигляді однієї деталі (виливка), що містить верхній та нижній пояси, з'єднані один з одним вертикальними колонками, утворюючи ресорний проміжок з пружинною площадкою, горизонтальні надбуксові ділянки, спряжені з верхнім поясом, колонками, верхнім та нижнім нахиленими поясами з прямолінійними і криволінійними ділянками, утворюючими з зовнішніми щелепними напрямними буксові проміжки,...
Ковзун візка вантажного вагона
Номер патенту: 15462
Опубліковано: 17.07.2006
Автори: Мархай Володимир Вікторович, Міщенко Андрій Анатолієвич, Савчук Орест Макарович, Пшінько Олександр Миколайович
МПК: B61F 5/00
Мітки: візка, вагона, вантажного, ковзун
Формула / Реферат:
1. Ковзун візка вантажного вагона, призначений для модернізації типових трьохелементних візків з метою покращення їх ходових якостей, що містить два однакові пружні елементи циліндричної або призматичної форми, виготовлені із поліуретанового матеріалу з модулем пружності 15-35 МПа, постійну та регульовані прокладки, за допомогою яких регулюють висоту ковзуна, і ковпак ковзуна, рухомо з'єднаний з надресорною балкою, який відрізняється тим, що...
Пристрій для повороту візка вантажного вагона
Номер патенту: 51189
Опубліковано: 15.11.2002
Автори: Герасименко Євген Миколайович, Мямлін Сергій Віталійович
МПК: B61F 5/38
Мітки: повороту, пристрій, візка, вантажного, вагона
Формула / Реферат:
Пристрій для повороту візка вантажного вагона, що складається з двох бокових рам, двох колісних пар з буксами, двох комплектів центрального ресорного підвішування, надресорної балки та важільної гальмівної передачі, який відрізняється тим, що на бокових рамах візка встановлено упори, з якими вільно зв'язані штоки пневмоциліндрів, жорстко закріплених на рамі вагона, та до пневмоциліндрів приєднані пневматичні трубки, які, в свою чергу,...
Попередній патент: Одноперехідний фототранзистор
Наступний патент: Пристрій для захисту від витоків струму на землю
Випадковий патент: Спосіб перевантажування твердої речовини, що має високий вміст вологи (варіанти), та поплавець для його здійснення