Спосіб визначення положення робочого органу в грунті
Номер патенту: 22148
Опубліковано: 30.04.1998
Автори: Бродський Анатолій Леонідович, Теплицький Абрам Хунович, Зорін Іван Семенович, Єндовців Ігор Витальович

Формула / Реферат
Способ определения положення рабочего органа в грунте, состоящий в том, что излучают в грунтовой массив радиосигнал и регистрируют сигнал, прошедший через грунтовой массив, приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали, отличающийся тем, что на поверхности грунта отмечают горизонтальную проекцию траектории движения рабочего органа, симметрично ей размещают не менее двух антенн, выполненных в виде однопроводных открытых линий, причем питание первой антенны осуществляют от генератора, формирующего синусоидальный сигнал, а второй от генератора через управляемое фазосдвигающее устройство с обеспечением излучения сигнала в противофазе, при этом в вертикальной плоскости, проходящей через заданную траекторию движения рабочего органа, формируется зона нулевой напряженности суммарного радиосигнала, на рабочем органе устанавливают антенну приемного устройства, затем суммарный сигнал от двух антенн после прохождения через грунт регистрируют приемным устройством, по величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане, далее при помощи фазосдвигающего устройства изменяют сдвиг фаз до равенства нулю суммарного сигнала, а по величине сдвига фаз определяют направление отклонения рабочего органа от проектной траектории в плане.
Текст
Изобретение относится к области строительного производства и может быть использовано для определения местоположения рабочего органа, например, пневмопробойника, в грунте при бестраншейной прокладке подземных коммуникаций. Известен способ определения положения рабочего органа в грунте, основанный на использовании в качестве канала информации лазерного луча [1]. Недостатком способа, основанного на использовании лазерного луча, является сложность и низкая эффективность при проходке непрямолинейных каналов в грунте. Более совершенным является способ определения положения рабочего органа в грунте, основанный на регистрации на поверхности грунта радиосигнала, излучаемого генератором, располагаемым в рабочем органе [2]. Недостатком этого способа является его трудоемкость, обусловленная необходимостью периодического поиска рабочего органа, отсутствие непрерывной информации о положении рабочего органа, что усложняет управляемую проходку каналов в грунте, невозможность точного определения отклонения рабочего органа в плане и в вертикальной плоскости, а также невозможность задания требуемой траектории проходки каналов в грунте. В основу изобретения поставлена задача создания способа определения положения рабочего органа в грунте, который позволяет снизить трудоемкость определения положения рабочего органа в грунте, повысить точность определения местоположения рабочего органа в плане, а также обеспечить возможность задания траектории проходки в грунте. Поставленная задача решается тем, что в способе определения положения рабочего органа в грунте, заключающемся в том, что грунтовой массив излучают радиосигнал и регистрируют сигнал, прошедший через грунтовый массив, приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали, согласно изобретению, на поверхности грунта отмечают горизонтальную проекцию траектории движения рабочего органа, симметрично ей размещают не менее 2-х антенн, выполненных в виде однопроводных открытых линий, причем первая антенна запитана от генератора, формирующего синусоидальный сигнал, а вторая от генератора через управляемое фазосдвигающее устройство с обеспечением излучения сигнала в противофазе, при этом в вертикальной плоскости, проходящей через заданную траекторию движения рабочего органа формируется зона нулевой напряженности суммарного радиосигнала, на рабочем органе устанавливают антенну приемного устройства, затем суммарный сигнал от двух антенн после прохождения через грунт регистрируют приемным устройством, по величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане, далее изменяют сдвиг фаз до равенства нулю суммарного сигнала, а по величине сдвига фаз определяют отклонение рабочего органа от проектной траектории в плане. Сущность изобретения поясняется чертежом (фиг.), на котором приведена схема устройства для осуществления предлагаемого способа. Способ реализуют с помощью устройства, которое состоит из однопроводных открытых антенн 1 и 2, приемной антенны 3, закрепленной на рабочем органе 4 и соединенной через перестраиваемый частотный фильтр 5 с приемным устройством 6. Выход приемного устройства 6 через усилитель 7 соединен с одним из входов устройства сравнения 8, второй вход которого соединен через регулировочный резистор 9 с блоком опорного напряжения 10. Выход устройства сравнения 8 соединен с индикатором отклонения рабочего органа в плане 11, со звуковым сигнализатором 12 не электронным ключом 13 который через электромагнитный клапан 14 отключает привод рабочего органа 4. Питание антенны 1 осуществляется непосредственного от перестраиваемого по частоте генератора 15. Питание антенны 2 осуществляется от генератора 15 через фазовращатель с регулируемой величиной сдвига фазы 16. На рабочем органе 4 установлен индуктивный трансформаторный датчик 17. Датчик 17 снабжен питающим генератором 18. Датчик 17 имеет два выхода на первом из которых выходной сигнал появляется при от отклонении рабочего органа 4 вверх, а на втором - при отклонении вниз. Выходы датчика 17 соединены с пороговыми усилителями 19 и.20, выходы которых соединены с индикаторами 21 и 22 отклонения рабочего органа 4 в вертикальной плоскости. Устройство снабжено управляющим ключом 23, который на период измерений включает генератор 18 и через электронный ключ 13 и электромагнитный клапан 14 отключает привод рабочего органа 4. Якорь 24 индуктивного трансформаторного датчика 17 закреплен шарнирно в вертикальной плоскости, а статор 25 жестко закреплен на корпусе рабочего органа 4 с возможностью регулировки. Определение положения рабочего органа в грунте предлагаемым способом осуществляют следующим образом. Рабочий орган 4, например, пневмопробойник, устанавливают в котлован на заданной отметке. При помощи кондуктора задают требуемое направление проходки. На дневной поверхности грунта устанавливают однопроводные открытые антенны 1 и 2 симметрично оси вертикальной проекции заданной траектории движения рабочего органа 4 в грунте на расстоянии 1,1 - 1,25 от средней глубины проходки друг от друга. Включают привод и вводят рабочий орган 4 в стенку котлована на одну длину рабочего органа, Затем привод отключают и производят настройку измерительной системы. Для этого включают генератор 15 и настраивают его на необходимую частоту. Оптимальной является такая частота радиосигнала, при которой расстояние между антеннами 1 и 2 равно длине волны радиосигнала. На эту же частоту настраивают узкополосный частотный фильтр 5. Фазовращатель 16 настраивают так, чтобы сдвиг фазы радиосигнала на антенне 2 относительно радиосигнала на антенне 1 равнялся 180°. При этом в вертикальной плоскости, проходящей через траекторию движения рабочего органа, формируется зона нулевой суммарной амплитуды радиосигнала вследствие сложения двух противофазных сигналов. Поэтому электродвижущая сила, наводимая в приемной антенне 3, выполненной в виде рамочной антенны, суммарным радиосигналом от антенн 1 и 2, будет равна нулю при нахождении рабочего органа 4 на заданной траектории в плане. Регулировочным резистором 9 устанавливают на втором входе устройства сравнения 8 напряжение, соответствующее допустимому отклонению рабочего органа 4 от заданной траектории в плане. Статор 25 датчика 17 устанавливают так, чтобы его ось в исходном положении совпала с вертикальной осью якоря 24. После окончания настройки измерительной системы включают привод рабочего органа 4. При движении рабочего органа 4 по заданной траектории в плане антенна 3 будет находиться в зоне нулевой суммарной амплитуды радиосигналов, а значит электродвижущая сила, индуцируемая в ней радиосигналами, будет равна нулю и на выходе приемного устройства 6 и усилителя 7 сигнал будет отсутствовать. При отклонении рабочего органа 4 от заданной траектории в плане приемная антенна 3 выйдет из зоны нулевой суммарной амплитуды радиосигналов и в ней будет индуцироваться электродвижущая сила тем большая, чем больше отклонение рабочего органа 4 от заданной траектории в плане. Сигнал от антенны 3 через частотный фильтр 5, приемное устройство 6 и усилитель 7 поступает на первый вход устройства сравнения 8. на второй вход которого через резистор 9 подается напряжение, соответствующее величине допустимого отклонения рабочего органа 4 от заданной траектории в плане. Если напряж ение сигнала на первом входе устройства сравнения 8 превысит напряжение на его втором входе, на выходе устройства сравнения появится сигнал, который включит индикатор 11, звуковой сигнализатор 12 и посредством электронного ключа 13 и электромагнитного клапана 14 отключит привод рабочего Органа 4. Для определения отклонения по направлению в плане регулировкой фазовращателя 16 добиваются такого сдвига фаз радиосигналов на антеннах 1 и 2. при котором в месте расположения рабочего органа 4 опять возникнет зона нулевой суммарной амплитуды радиосигнала. При этом уменьшение сдвига фаз радиосигналов будет свидетельствовать об отклонении рабочего органа 4 в сторону антенны 1, а увеличение сдвига фаз -об отклонении в сторону антенны 2. Для определения отклонения рабочего органа 4 в вертикальной плоскости управляющим ключом 23 периодически включают генератор 18 и, посредством электронного ключа 13 и электромагнитного клапана 14, отключает привод рабочего органа 4. При наличии отклонения рабочего органа в вертикальной плоскости якорь 24 индуктивного трансформаторного датчика 17 смещается относительно статора 25 и в зависимости от направления смещения на одном из выходов датчика 17 появляется сигнал, амплитуда которого тем больше, чем больше смещение рабочего органа 4. В зависимости от направления смещения сигнал от датчика 17 появится на входе одного из пороговых усилителей 19 или 20 и, если амплитуда сигнала выше порога срабатывания усилителя, включается один из индикаторов 21 или 22. Порог срабатывания усилителей 19 и 20 устанавливается в зависимости от допустимой величины отклонения рабочего органа в вертикальной плоскости. После окончания измерений при отсутствии отклонений управляющим ключом 23 через ключ 13 и клапан 14 включают привод рабочего органа 4 и выключают генератор 18. Последующие измерения отклонений в вертикальной плоскости производят аналогично. Определение положения рабочего органа в плане производят непрерывно. Измерения отклонения рабочего органа в вертикальной плоскости производят периодически, в зависимости от требуемой точности. Таким образом, предлагаемый способ позволяет снизить трудоемкость определения положения рабочего органа за счет исключения операции поиска рабочего органа на поверхности грунта, повысить информативность за счет определения смещения рабочего органа в плане и в вертикальной плоскости, а также обеспечить возможность задания траектории движения рабочего органа в грунте.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of position of executive body in soil
Автори англійськоюTeplytskyi Abram Khunovych, Brodskyi Anatolii Leonidovych, Yendovtsiv Ihor Vitaliiovych, Zorin Ivan Semenovych
Назва патенту російськоюСпособ определения положения рабочего органа в грунте
Автори російськоюТеплицкий Абрам Хунович, Бродский Анатолий Леонидович, Ендовцив Игорь Витальевич, Зорин Иван Семенович
МПК / Мітки
МПК: E21B 47/02, E02F 5/18
Мітки: органу, робочого, положення, визначення, спосіб, грунті
Код посилання
<a href="https://ua.patents.su/3-22148-sposib-viznachennya-polozhennya-robochogo-organu-v-grunti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення робочого органу в грунті</a>
Фреза робочого органу траншейно-котлованної машини

Номер патенту: 970
Опубліковано: 15.12.1993
Автори: Фурто Геннадій Савич, Коцюба Юрій Гордійович, Кушнір Юхим Абрамович, Глазман Борис Михайлович, Биков Олександр Володимирович
МПК: E02F 5/02
Мітки: траншейно-котлованної, робочого, машини, фреза, органу
Формула / Реферат:
Фреза рабочего органа траншейно-котлованной машины, включающая ступицу с жестко закрепленными на ней спицами с резцами, отличающаяся тем, что, с целью расширения технологических возможностей за счет разработки различных типов грунтов, свободные концы спиц соединены между собой посредством перемычек, спицы и перемычки имеют грани со скосами, причем спицы по своей длине снабжены ножами, а свободные торцовые части спиц имеют резцы, продольные...
Направляючий і настановний пристрій для робочого органу машини для свердління або забивання випускних затворів шахтних печей
Номер патенту: 7058
Опубліковано: 31.03.1995
Автори: П'єр Майє, Леон Улвелінг, Жан Мец
МПК: C21B 7/14
Мітки: направляючий, органу, настановний, печей, забивання, робочого, пристрій, свердління, випускних, шахтних, машини, затворів
Формула / Реферат:
Формула изобретения1. Направляющее и установочное устройство для рабочего органа машины для сверления или забивки выпускных отверстий шахтных печей, содержащее лафет рабочего органа, закрепленный на одном конце манипулятора, состоящего из кронштейна и направляющей штанги, причем другим концом манипулятор шарнирно закреплен в главном подшипнике, отличающееся тем, что, с целью повышения надежности и улучшения условий обслуживания,...
Механізм навішування робочого органу збиральної машини
Номер патенту: 8112
Опубліковано: 26.12.1995
Автори: Козачок Борис Дмитрович, Архипов Геннадій Матвійович
МПК: A01D 41/12
Мітки: органу, навішування, механізм, збиральної, машини, робочого
Формула / Реферат:
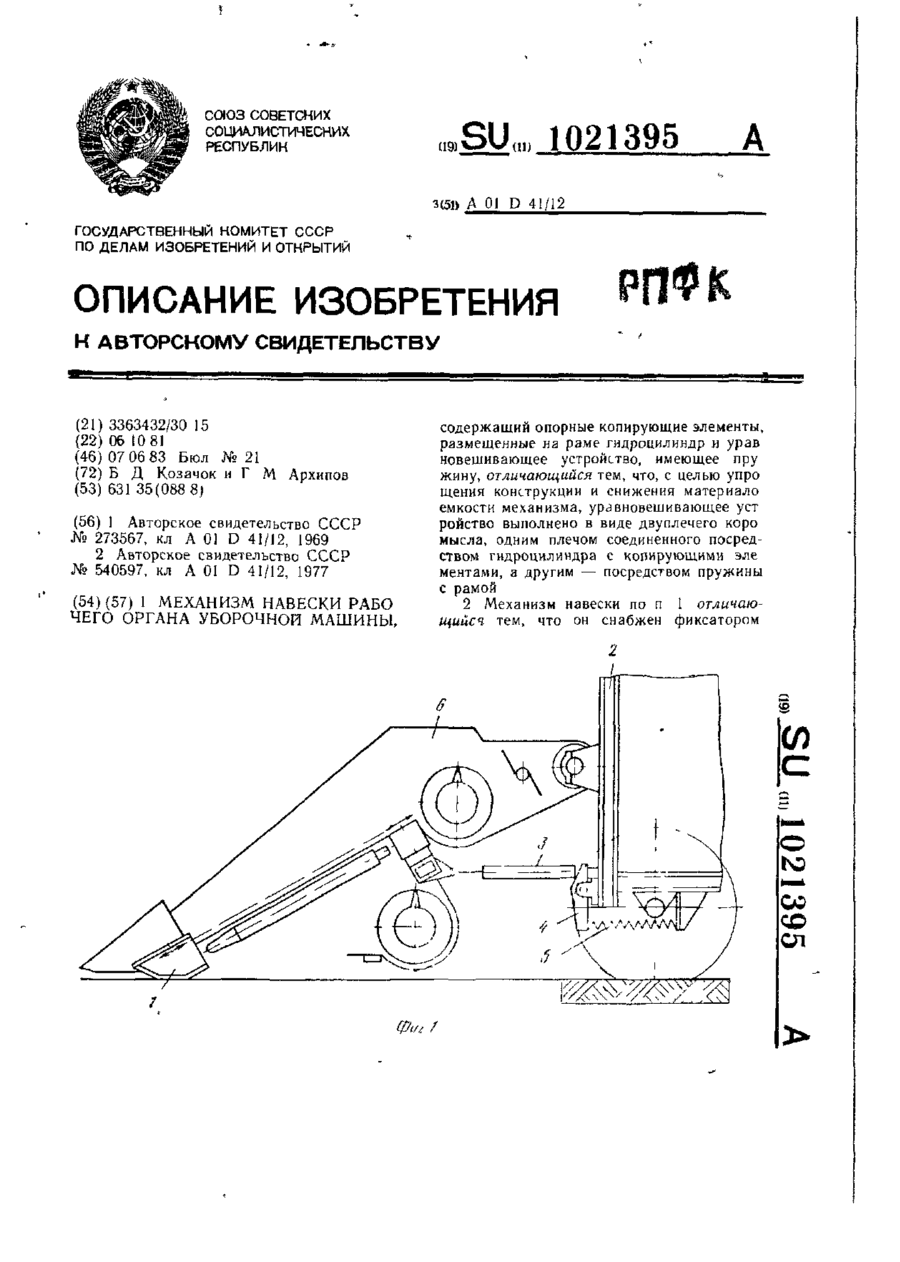
1. Механизм навески рабочего органа уборочной машины, содержащий опорные копирующие элементы, размещенные на раме гидроцилиндр и уравновешивающее устройство, имеющее пружину, отличающийся тем, что, с целью упрощения конструкции и снижения материалоемкости механизма, уравновешивающее устройство выполнено в видедвуплечего коромысла, одним плечом соединенного посредством гидроцилиндра с копирующими элементами, а другим - посредством пружины...
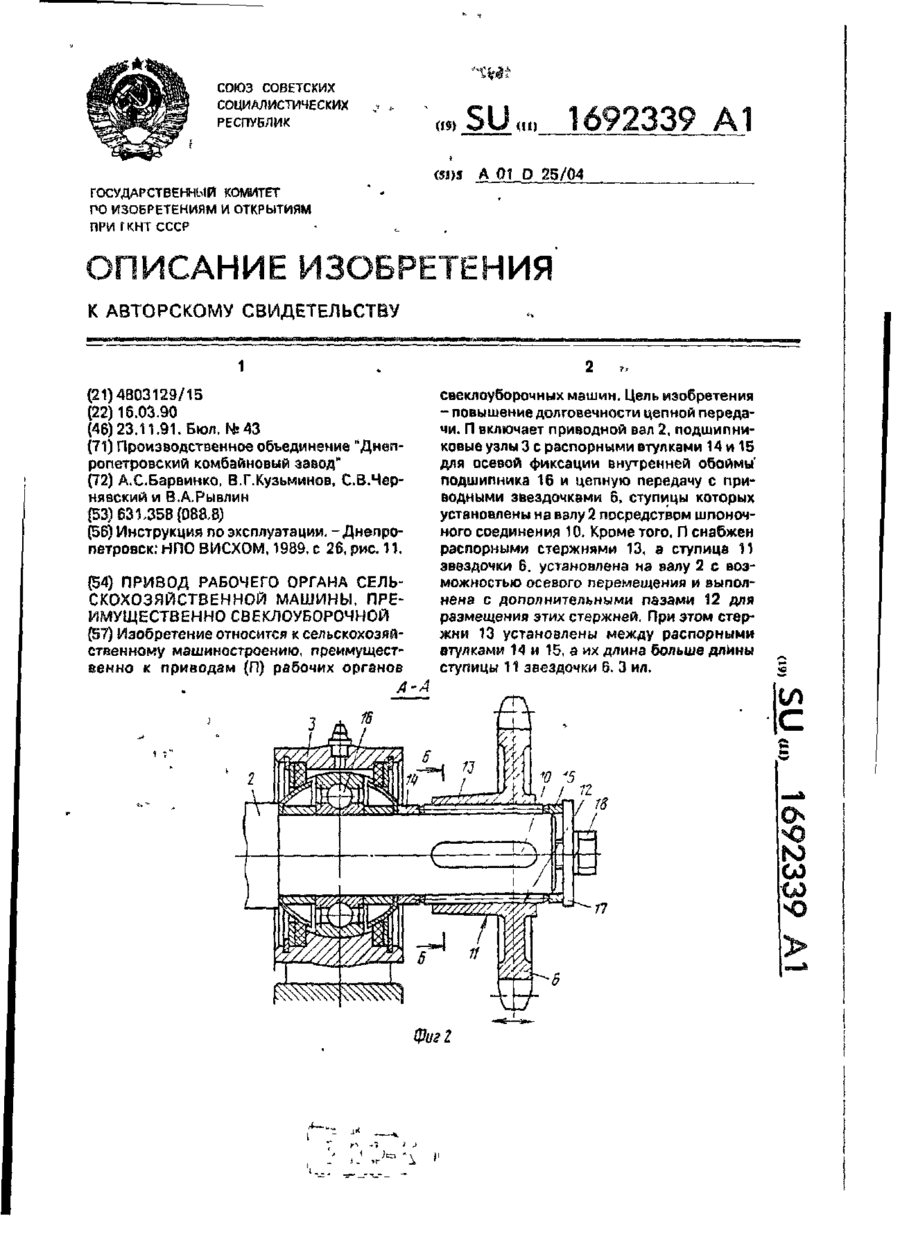
Привод робочого органу сільськогосподарської машини, переважно бурякозбиральної
Номер патенту: 7717
Опубліковано: 26.12.1995
Автори: Чернявський Спиридон Васильович, Кузьмінов Вадим Георгійович, Ривлін Валерій Олександрович, Барвінко Олександр Самійлович
МПК: A01D 25/04
Мітки: привод, переважно, органу, робочого, машини, бурякозбиральної, сільськогосподарсько
Формула / Реферат:
Привод рабочего органа сельскохозяйственной машины, преимущественно свеклоуборочной, содержащий приводные валы с распорными втулками для осевой фиксации внутренней обоймы подшипников и приводные звездочки цепной передачи, ступицы которых установлены на валах, отличающийся тем, что, с целью повышения долговечности цепной передачи, в ступице выполнены параллельно оси вала, диаметрально расположенные пазы, в которые установлены распорные...
Ротаційне грунтообробне знаряддя та ніж роторного робочого органу
Номер патенту: 20306
Опубліковано: 15.07.1997
Автор: Пергат Владислав Васильович
МПК: A01B 33/00, A01B 63/00
Мітки: грунтообробне, органу, знаряддя, ротаційне, робочого, роторного
Формула / Реферат:
1. Ротационное почвообрабатывающее орудие, содержащее раму, на которой перпендикулярно направлению движения орудия расположены два горизонтальных приводных вала, установленные в опорах вращения, и закрепленные на валах роторные рабочие органы, отличающееся тем, что оба вала расположены на одной из стонон рамы и закреплены в трех опорах вращения, одна из которых является общей для валов и в которой последние установлены под углом α –...
Попередній патент: Спосіб газифікації вугілля
Наступний патент: Буй
Випадковий патент: Цапфений розподільник дворядної поршневої гідромашини