Пристрій для визначення параметрів балістичного вітру при стрільбі артилерії
Формула / Реферат
Пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, який містить об'єкт спостереження, пристрій для спостереження, лічильно-обчислювальний прилад з блоком розрахунку, датчик щільності повітря і датчик температури повітря, причому пристрій для спостереження містить передавач, приймач і антенний модуль, що включає антену, привід настройки по куту місця і привід настройки по азимуту, який відрізняється тим, що він додатково містить задавальний модуль, програмно-керуючий модуль і пусковий блок, причому задавальний модуль містить блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності, антенний модуль додатково включає привід орієнтації і привід переміщення, а лічильно-обчислювальний прилад додатково містить блок пам'яті, блок електронного ключа і блок обчислювання, при цьому пусковий блок з'єднаний з програмно-керуючим модулем, а блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності споряджені елементами ручної установки параметрів, причому виходи блока задання орієнтації, блока задання переміщення, блока задання кута місця, блока задання азимуту і блока задання похилої дальності підключені до окремих входів програмно-керуючого модуля і окремих входів блока пам'яті, керуючі входи приводу орієнтації, приводу переміщення, приводу настройки по куту місця, приводу настройки по азимуту, передавача, приймача, блока розрахунку, блока пам'яті, блока електронного ключа і блока обчислювання підключені до окремих виходів програмно-керуючого модуля, виходи блока розрахунку, датчика щільності повітря і датчика температури повітря підключені до окремих входів блока пам'яті, вихід якого за допомогою блока електронного ключа з'єднаний з входом блока обчислювання, а як об'єкт спостереження задають область повітряного потоку на траєкторії стрільбі.
Текст
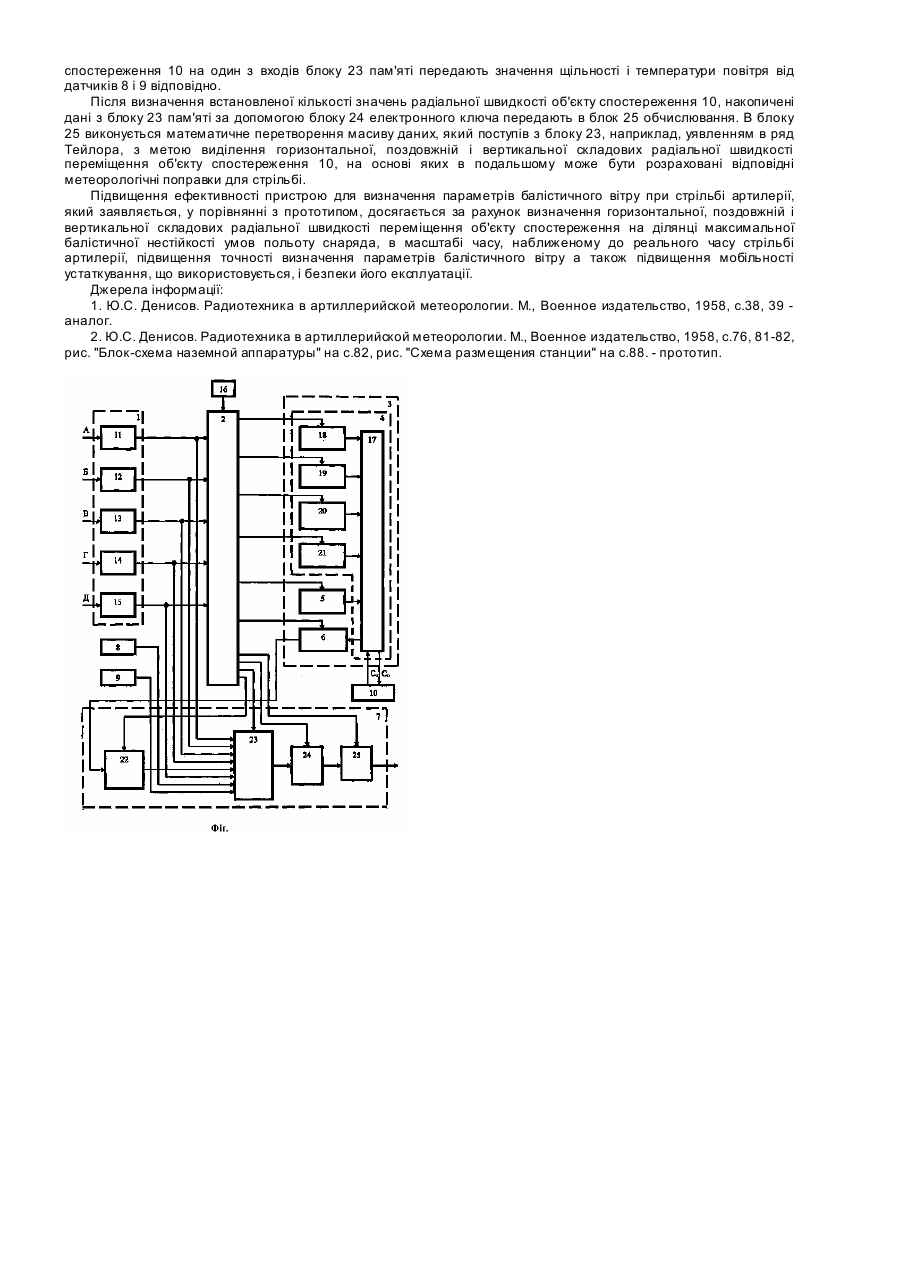
Корисна модель відноситься до галузі озброєння, зокрема, до метеорологічного забезпечення ракетних військ і артилерії, а саме, до пристроїв для визначення параметрів балістичного вітру при стрільбі артилерії. Відомий пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, який містить об'єкт спостереження і пристрій для спостереження, у якому використовується оптичний засіб [1]. Недоліками відомого пристрою для визначення параметрів балістичного вітру при стрільбі артилерії є те, що у якості об'єкту спостереження використовується куля, яка наповнена воднем і переміщується у просторі під впливом вітру незалежно від траєкторії стрільбі, що не дозволяє отримати дані про параметри вітру на заданій ділянці траєкторії стрільбі, а саме на ділянці максимальної балістичної нестійкості умов польоту снаряда. Використання у якості пристрою для спостереження оптичних засобів (теодолітів) вимагає для подальшого обчислення швидкості переміщення об'єкту спостереження застосування додаткового пристрою для вимірювання часу. Таким чином, визначення параметрів переміщення вітру зв'язано із значними витратами часу. Крім того, в умовах туману, низької хмарності, вночі спостереження за кулею за допомогою оптичних засобів неможливе. Найбільш близьким технічним рішенням, яке обрано за прототип, є пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, який містить об'єкт спостереження, пристрій для спостереження, рахунковo-вирішальний прилад з блоком розрахунку, датчик щільності повітря і датчик температури повітря, причому пристрій для спостереження містить передавач, приймач і антенний модуль, що включає антену, привод настройки по куту місця і привод настройки по азимуту [2]. До недоліків відомого пристрою, який обраний за прототип, відноситься те, що у якості об'єкту спостереження використовується зонд, який наповнений воднем і переміщується у просторі під впливом вітру незалежно від траєкторії стрільбі, що не дозволяє отримати дані про параметри вітру на заданій ділянці траєкторії стрільбі, а саме на ділянці максимальної балістичної нестійкості умов польоту снаряда. Відомий пристрій забезпечує визначення тільки радіальної швидкості переміщення об'єкту спостереження і не дозволяє отримати значення її складових по трьох координатах у Декартові системи, що в подальшому не дає можливості визначити всі необхідні поправки до умов стрільбі, а значить і отримати високу точність стрільбі. Для підготовки і запуску зонда, включаючи підготовку і заповнення оболонки зонда воднем, отримання, обробку і використовування результатів спостереження за зондом і обчислення параметрів балістичного вітру потрібні значні витрати часу, що не дозволяє забезпечити обстріл супротивника в реальному масштабі часу. Необхідно також відзначити, що відомий пристрій пов'язаний з безповоротними втратами зонда. Добування водню в польових умовах і заповнення ним оболонки зонда вимагає підвищених заходів безпеки через небезпеку спалаху і вибуху водню. В основу корисної моделі поставлено задачу шля хом усунення недоліків прототипу забезпечити визначення параметрів балістичного вітру в трьох координатах у Декартові системи на заданій ділянці траєкторії стрільбі в масштабі часу, наближеному до реального часу проведення стрільбі, підвищити точність визначення параметрів балістичного вітру, підви щити мобільність і безпеку уста ткування, що використовується, спростити і здешевіти його експлуатацію. Суть корисної моделі для визначення параметрів балістичного вітру при стрільбі артилерії, який містить об'єкт спостереження, пристрій для спостереження, рахунковo-вирішальний прилад з блоком розрахунку, датчик щільності повітря і датчик температури повітря, причому пристрій для спостереження містить передавач, приймач і антенний модуль, що включає антену, привод настройки по куту місця і привод настройки по азимуту, досягається тім, що він додатково містить задаючий модуль, програмно-управляючий модуль і пусковий блок, причому задаючий модуль містить блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності, антенний модуль додатково включає привод орієнтації і привод переміщення, а рахункове -вирішальний прилад додатково містить блок пам'яті, блок електронного ключа і блок обчислювання, при цьому пусковий блок з'єднаний з програмно-управляючим модулем, а блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності споряджені елементами ручної установки параметрів, причому виходи блоку задання орієнтації, блоку задання переміщення, блоку задання кута місця, блоку задання азимуту і блоку задання похилої дальності підключені до окремих входів програмно-управляючого модуля і окремих входів блоку пам'яті, управляючи входи приводу орієнтації, приводу переміщення, приводу настройки по куту місця, приводу настройки по азимуту, передавача, приймача, блоку розрахунку, блоку пам'яті, блоку електронного ключа і блоку обчислювання підключені до окремих виходів програмно-управляючого модуля, виходи блоку розрахунку, датчику щільності повітря і датчику температури повітря підключені до окремих входів блока пам'яті, вихід якого за допомогою блоку електронного ключа з'єднаний з входом блоку обчислювання, а у якості об'єкта спостереження задають область повітряного потоку на траєкторії стрільбі. Порівняльний аналіз технічного рішення, яке заявляється, із прототипом, показує, що пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, який заявляється, відрізняється тім, що він додатково містить задаючий модуль, програмно-управляючий модуль і пусковий блок, причому задаючий модуль містить блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності, антенний модуль додатково включає привод орієнтації і привод переміщення, а рахунковo-вирішальний прилад додатково містить блок пам'яті, блок електронного ключа і блок обчислювання, при цьому пусковий блок з'єднаний з програмно-управляючим модулем, а блок задання орієнтації, блок задання переміщення, блок задання кута місця, блок задання азимуту і блок задання похилої дальності споряджені елементами ручної установки параметрів, причому виходи блоку задання орієнтації, блоку задання переміщення, блоку задання кута місця, блоку задання азимуту і блоку задання похилої дальності підключені до окремих входів програмно-управляючого модуля і окремих входів блоку пам'яті, управляючи входи приводу орієнтації, приводу переміщення, приводу настройки по куту місця, приводу настройки по азимуту, передавача, приймача, блоку розрахунку, блоку пам'яті, блоку електронного ключа і блоку обчислювання підключені до окремих виходів програмно-управляючого модуля, ви ходи блоку розрахунку, да тчику щільності повітря і датчику температури повітря підключені до окремих входів блока пам'яті, вихід якого за допомогою блоку електронного ключа з'єднаний з входом блоку обчислювання, а у якості об'єкта спостереження задають область повітряного потоку на траєкторії стрільбі. Суть корисної моделі пояснюється за допомогою ілюстрації, де на Фіг. представлений один з варіантів пристрою для визначення параметрів балістичного вітру при стрільбі артилерії, який заявляється. Пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, як варіант конструктивного виконання, містить задаючий модуль 1, програмно-управляючий модуль 2, пристрій для спостереження 3 з антенним модулем 4, передавачем 5 і приймачем 6, рахунковo-вирішальний прилад 7, датчик 8 щільність повітря, датчик 9 температури повітря і об'єкт спостереження 10. Задаючий модуль 1 складається з блоку 11 задання орієнтації, блоку 12 задання переміщення, блоку 13 задання кута місця, блоку 14 задання азимуту, блоку 15 задання похилої дальності. Програмно-управляючий модуль 2 сполучений з пусковим блоком 16, призначеним для запуску роботи запропонованого пристрою в автоматичному режимі. Як варіант, елемент 16 виконаний у вигляді кнопки Пуск. Антенний модуль 4 включає антену 17, привід 18 орієнтації, привід 19 переміщення, привід 20 настройки по куту місця, привід 21 настройки по азимуту. Рахунковo-вирішальний прилад 7 включає блок 22 розрахунку, блок 23 пам'яті, блок 24 електронного ключа, блок 25 обчислювання. Входи блоків 11-15 забезпечено елементами А - Д ручної установки параметрів, що задаються. Виходи блоків 11-15 сполучено з окремими входами програмно-управляючого модуля 2 і з окремими входами блоку 23 пам'яті. Виходи програмноуправляючого модуля 2 підключені до управляючих входів передавача 5, приймача 6, приводів 18-21, блоку 22 розрахунку, блоку 23 пам'яті, блоку 24 електронного ключа і блоку 25 обчислювання. Вихід передавача 5 і вхід приймача 6 сполучені з антеною 17, а приводи 18-21 мають змогу здійснювати її переміщення у відповідних площинах простору. До виходу приймача 6 підключеній вхід блоку 22 розрахунку, вихід якого підключеній до одного з входів блоку 23 пам'яті. Вихід блоку 23 пам'яті за допомогою блоку 24 електронного ключа сполучений з входом блоку 25 обчислювання. Антена 17 за допомогою випромінюваного зондуючого сигналу Сз і віддзеркаленого сигналу C0 має змогу взаємодіяти з об'єктом спостереження 10. У якості об'єкту спостереження 10 використовують область повітряного потоку, наприклад на ділянці прояву максимальної балістичної нестійкості траєкторії стрільбі, координати якої можуть бути примусово задані за допомогою елементів В - Д р учної установки параметрів виходячи з умов стрільбі. Пристрій для визначення параметрів балістичного вітру при стрільбі артилерії, який заявляється, працює наступним чином. Перш за все пристрій для визначення параметрів балістичного вітру стрільбі артилерії, що заявляється, розміщують на бойовий позиції. Виходячи з умов розміщення на бойовій позиції, за допомогою елемента А ручної установки блоку 11 вводять дані для орієнтації антенного модуля 4 за сторонами світу і рівню горизонту, а за допомогою елемента Б ручної установки блоку 12 вводять значення величини горизонтального переміщення антенного модуля 4. Виходячи з району обстрілу цілі визначають траєкторію стрільбі і задають координати об'єкту спостереження 10 на ділянці прояву максимальної балістичної нестійкості умов стрільбі, зокрема за допомогою елемента В блоку 13 вводять значення кута місця, за допомогою елемента Г блоку 14 - значення азимуту і за допомогою елемента Д блоку 15 - значення похилої дальності. Як варіант, задання параметрів здійснюють в аналоговому вигляді. Тоді в блоках 11-15 значення цих параметрів перетворюють в сигнали в цифровому коді. Вказані сигнали передають з виходів блоків 11 - 15 на окремі входи програмно-управляючого модуля 2 та на окремі входи блока 23 пам'яті, на інші входи якого поступають сигнали з датчика 8 щільності повітря і датчика 9 температури повітря. Робота пристрою, що пропонується, в автоматичному режимі починається з дії на програмно-управляючий модуль 2 за допомогою пускового блоку 16. Після цього програмно-управляючий модуль 2 в певній послідовності видає з своїх ви ходів команди на керуючі входи приводів 18-21, передавача 5, приймача 6 та блоків 22 - 25, приводячи їх в дію в заданій послідовності. Перш за все за допомогою приводу 18 переміщують антену 17 в горизонтальній і вертикальній площинах для її орієнтації за сторонами світу і рівню горизонту. Далі за допомогою приводу 19 переміщують антену 17 в горизонтальній площині на задану відстань, наприклад до декількох тисяч довжин хвиль сигналу передавача. За допомогою приводу 20 повертають антену 17 у вертикальній площині на заданий кут місця, а за допомогою приводу 21 - в горизонтальній площині на заданий азимут. Після вказаного переміщення антени 17 програмно-управляючий модуль 2 включає передавач 5, який за допомогою антени 17 посилає зондуючий сигнал Сз до об'єкту спостереження 10. Віддзеркалений від об'єкту спостереження 10 сигнал C0 приймається антеною 17, звідки він поступає на приймач 6, який включається програмно-управляючим модулем 2 через деякий час після надсилання зондуючого сигналу Сз за допомогою передавача 5. Цей час визначається значенням похилої дальності, що задана за допомогою елемента Д блоку 15. Віддзеркалений сигнал після перетворення з виходу приймача 6 подається на вхід блоку 22 розрахунку, де, як варіант, по зсуву фаз між сигналом, віддзеркаленим від об'єкту спостереження 10, і сигналом когерентного гетеродина (на Фіг. не приведений) визначають значення радіальної швидкості переміщення об'єкту спостереження 10, після чого передають його для запам'ятання в блок 23 пам'яті. Далі, по команді програмно-управляючого модуля 2 привід 19 знову переміщає антену 17 на задану відстань, а приводи 20 і 21 повертають антену відповідно у вертикальній і горизонтальній площинах згідно нових значень кута місця і азимута, відмінних від спочатку заданих. Програмноуправляючий модуль 2 також змінює і інтервал часу між включенням передавача 5 і приймача 6 відповідно до нового значення похилої дальності. При цьому зміни положення антени по куту місця і азимуту складають декілька градусів, а зміна похилої дальності - декілька десятків метрів, що визначається технічними можливостями передавача 5 і приймача 6, а також особливостями конструкції антени 17. Після вказаних переміщень за допомогою блоку 22 визначається нове значення радіальної швидкості переміщення об'єкту спостереження 10, яке передають для запам'ятання в блок 23 пам'яті. Надалі зміна положення антени і визначення радіальної швидкості переміщення об'єкту спостереження, як вказано вище, може повторюватися, а кількість повторень визначається виходячи з необхідної точності розрахунку радіальної швидкості переміщення об'єкту спостереження 10. Синхронно з визначенням значень радіальної швидкості переміщення об'єкту спостереження 10 на один з входів блоку 23 пам'яті передають значення щільності і температури повітря від датчиків 8 і 9 відповідно. Після визначення встановленої кількості значень радіальної швидкості об'єкту спостереження 10, накопичені дані з блоку 23 пам'яті за допомогою блоку 24 електронного ключа передають в блок 25 обчислювання. В блоку 25 виконується математичне перетворення масиву даних, який поступів з блоку 23, наприклад, уявленням в ряд Тейлора, з метою виділення горизонтальної, поздовжній і вертикальної складових радіальної швидкості переміщення об'єкту спостереження 10, на основі яких в подальшому може бути розраховані відповідні метеорологічні поправки для стрільбі. Підвищення ефективності пристрою для визначення параметрів балістичного вітру при стрільбі артилерії, який заявляється, у порівнянні з прототипом, досягається за рахунок визначення горизонтальної, поздовжній і вертикальної складових радіальної швидкості переміщення об'єкту спостереження на ділянці максимальної балістичної нестійкості умов польоту снаряда, в масштабі часу, наближеному до реального часу стрільбі артилерії, підвищення точності визначення параметрів балістичного вітру а також підвищення мобільності устаткування, що використовується, і безпеки його експлуатації. Джерела інформації: 1. Ю.С. Денисов. Радиотехника в артиллерийской метеорологии. М., Военное издательство, 1958, с.38, 39 аналог. 2. Ю.С. Денисов. Радиотехника в артиллерийской метеорологии. М., Военное издательство, 1958, с.76, 81-82, рис. "Блок-схема наземной аппаратуры" на с.82, рис. "Схема размещения станции" на с.88. - прототип.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of parameters of ballistic wind at artillery fire
Автори англійськоюTymoshenko Roman Radyonovych
Назва патенту російськоюУстройство для определения параметров баллистического ветра при стрельбе артиллерии
Автори російськоюТимошенко Роман Радионович
МПК / Мітки
МПК: G01S 13/00, G01W 1/00, F41G 3/08
Мітки: параметрів, артилерії, балістичного, визначення, стрільби, пристрій, вітру
Код посилання
<a href="https://ua.patents.su/3-23166-pristrijj-dlya-viznachennya-parametriv-balistichnogo-vitru-pri-strilbi-artileri.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення параметрів балістичного вітру при стрільбі артилерії</a>
Спосіб визначення координат точки влучення кулі у відеомішень при навчанні у стрільбі та пристрій для його здійснення
Номер патенту: 56636
Опубліковано: 15.05.2003
Автори: Кривоносов Анатолій Іванович, Коритцев Ігор Васильович, Іванов Олександр Сергійович, Сідоров Геннадій Іванович
МПК: F41G 3/26
Мітки: координат, визначення, влучення, точки, спосіб, здійснення, відеомішень, пристрій, кулі, стрільби, навчанні
Формула / Реферат:
1 .Спосіб визначення координат точки влучення кулі у відеомішень при навчанні у стрільбі, у якому формують на проекційному екрані зображення фоново-цільової обстановки, реєструють точку влучення кулі в проекційний екран з наступною програмною обробкою результатів вимірювання координат в комп'ютері, який відрізняється тим, що рівномірно підсвічують проекційний екран інфрачервоним випромінюванням, за допомогою якого формується зображення...
Спосіб визначення метеорологічних поправок для підготовки стрільби артилерії
Номер патенту: 21089
Опубліковано: 15.02.2007
Автор: Тимошенко Роман Радионович
МПК: G01S 13/00, F41G 3/08, G01W 1/00
Мітки: поправок, стрільби, метеорологічних, визначення, підготовки, спосіб, артилерії
Формула / Реферат:
Спосіб визначення метеорологічних поправок для підготовки стрільби артилерії, при якому визначають район стрільби, розміщують радіолокаційну станцію на бойовій позиції, орієнтують антенний пристрій за сторонами світу і рівнем горизонту, формують електронний промінь антенного пристрою, переводять радіолокаційну станцію в режим радіолокації об’єкта радіолокації і обчислюють поправки на напрям і швидкість переміщення повітряного потоку з...
Радіоакустичний спосіб вимірювання параметрів вітру і пристрій для його здійснення
Номер патенту: 3819
Опубліковано: 27.12.1994
Автори: Альохін Володимир Іванович, Прошкін Євген Григорійович, Коритцев Ігор Васильович, Сідоров Геннадій Іванович
МПК: G01S 13/95
Мітки: спосіб, радіоакустичний, вимірювання, вітру, пристрій, параметрів, здійснення
Формула / Реферат:
1. Радиоакустический способ измерения параметров ветра, заключающийся в том, что излучают вертикально вверх акустический импульс синусоидальных колебаний, облучают возникающие от акустического импульса неоднородности среды непрерывными электромагнитными колебаниями с длиной волны, равной удвоенной известной длине волны акустических колебаний, принимают отраженные сигналы, отличающийся тем, что, с целью определения уровня турбулентности...
Пристрій для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об’єктів
Номер патенту: 22371
Опубліковано: 25.04.2007
Автори: Логвиненко Микола Федорович, Серков Олександр Анатолійович, Очерідник Світлана Володимирівна, Чурюмов Геннадій Іванович, Пєвнєв Володимир Яковлевич
МПК: G05B 23/02
Мітки: параметрів, передаточних, об'єктів, функцій, пристрій, динамічних, автоматизованого, визначення, нелінійних
Формула / Реферат:
Пристрій для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об'єктів, що містить фільтр Лагерра з n колами, n помножуючих пристроїв, блок усереднення, підсумовувач з n входами, блок керування, який відрізняється тим, що додатково введені додаткове коло фільтра Лагерра, додаткові блоки усереднення та регулювання параметрів.
Пристрій для візуалізації парадоксальної фази прицільної поводки зброї у спортивній стрільбі по рухомих мішенях
Номер патенту: 16989
Опубліковано: 15.09.2006
Автори: Ясінський Михайло Федорович, Банах Сергій Михайлович, Пятков Віктор Тимофійович, Павлюк Євгеній Олександрович, Магмет Тарас Миронович, Собко Ігор Петрович, Ясінська Людмила Михайлівна
МПК: F41J 5/00
Мітки: стрільби, парадоксальної, рухомих, мішенях, візуалізації, зброї, спортивний, поводки, фазі, пристрій, прицільної
Формула / Реферат:
Пристрій для візуалізації парадоксальної фази прицільної поводки зброї у спортивній стрільбі по рухомих мішенях, що включає нерухому основу, джерело випромінювання, встановлене з можливістю повороту відносно нерухомої основи, електродвигун, що з'єднаний з блоком управління, П-подібну раму і екран, який відрізняється тим, що він оснащений заставками, штовхачем, напрямною, кронштейнами та кінцевими вимикачами, причому заставки з'єднані між...
Попередній патент: Відцентрова фрикційна муфта
Наступний патент: Ретранслятор
Випадковий патент: Спосіб виробництва цукрового печива