Спосіб визначення місцеположення літаючого апарата або морського судна


Формула / Реферат
Спосіб визначення місцеположення літаючого апарата або морського судна, що включає визначення відстаней до земної поверхні, обробку отриманої інформації і прийняття рішення, який відрізняється тим, що по виміряних відстанях складають образ як вектор ознак, по цифровій моделі рельєфу місцевості для заданої висоти польоту над поверхнею землі обчислюють вектор ознак еталонів, а порівняння отриманого образу з образами еталонів здійснюють за допомогою функції розв'язку, де для досягнення однакової орієнтації образу з еталоном один з них дискретно обертають навколо центральної точки.
Текст
Спосіб відноситься до області управління безпілотними літаючими апаратами (ЛА) та визначення їх місцеположення по рельєфу земної поверхні або місцеположення морських суден по рельєфу дна моря, а також контролювання траєкторії пілотованих ЛА. Відомі способи визначення місцеположення ЛА по точках профілю місцевості або виведення їх на ціль по заздалегідь заданій програмі з допомогою інерційної апаратури. Аналогом до способу, що заявляється, може бути взята система ТЕРСОМ, в якій вимірюється вертикальний профіль рельєфу вздовж істинної траєкторії руху. Потім порівнянням отриманого профілю з найбільш близьким, що є в пам'яті процесора, визначається місцеположення ЛА. При цьому пошук здійснюється мінімізацією абсолютних різниць відміток профілів (Белоглазое И.Н. и др. Основы навигации по геофизическим полям Земли. - М.: Наука, 1985. - С.20 - 29). Аналогом можна вважати також спосіб визначення місцеположення корабля по рельєфу морського дна (Патент США №3212189, кл. 33 - 1, опубл. 19.10.65). Суть цього способу по діях мало відрізняється від системи ТЕРСОМ. Ці способи не завжди дають достовірні результати, що викликано невисокою. надійністю кореляційних функцій, з допомогою яких здійснюється визначення місцеположення ЛА. Найближчим до способу, що пропонується, є спосіб, що представлений в кореляційній системі РОС (Reed G.G., Hogan J.J. Range correlation guidance for cruise missiles. Proc. of the IEEE. NAECON 78. Dayton, 1978, v.3, p.1255 - 1262). Цей спосіб включає чотири дії вимірювання нахилених відстаней до точок земної поверхні по чотирьох напрямках в двох ортогональних площинах та висоти польоту, перетворення нахилених відстаней у висоти точок місцевості, підготовку еталонних профілів в пам'яті бортового процесора, порівняння отриманих профілів з еталонами і визначення положення ЛА по екстремуму кореляційної функції між профілем, отриманим в результаті вимірів, і профілем, що знаходиться в пам'яті бортового процесора. Недоліком цього способу є необхідність великої кількості точок профілю для надійного визначення кореляційної функції, оскільки кореляційна функція для кожного з чотирьох профілів надійно може бути визначена при кількості точок, профілю не менше 15 - 20, та неможливість визначення місцеположення безпілотного ЛА, якщо втрачене його орієнтування відносно місцевості. Ставиться задача підвищити достовірність визначення місцеположення ЛА чи морського судна по порівняно меншій кількості виміряних відстаней до поверхні землі і у випадку, коли на ЛА втрачено орієнтування. Вирішується задача зміною дій. По виміряних відстанях від ЛА до точок земної поверхні формують вектор-образ і по даних цифрової моделі рельєфу місцевості теж створюють відповідні еталонні вектори-образи. Порівняння образу, отриманого по результатах вимірів, з еталонами здійснюють не по кореляційній функції, а по функції розв'язку, тобто використовуючи основні положення теорії розпізнавання образів. Надійність системи розпізнавання забезпечується при значно меншій кількості компонент вектора ознак, ніж необхідна кількість точок для отримання кореляційної функції. Отже розпізнавання місця положення ЛА здійснюють шляхом порівняння образу, отриманого за ознаками, обчисленими в результаті проведених вимірів, з образами, що знаходяться в пам'яті процесора. Цього досягають з допомогою функції розв'язку, наприклад: x - вектор ознак отриманого образа; z - вектор ознак еталона; штрих означає транспонування. Можна використовувати й інші функції розв'язку. Створення еталонних образів, тобто обчислення їхніх векторів ознак виконують по цифровій моделі місцевості або по топографічній карті відповідних ділянок місцевості. Суть способу пояснюється з допомогою фіг.1. В точці S знаходиться ЛА, з якого одночасно визначені відстані ri (i = 1, 2, ...) до точок місцевості. Висота польоту визначається відстанню r9 = SN по прямовисній лінії. Відомі також кути між прямовисним променем і кожним з нахилених променів. Якщо через точку N провести горизонтальну площину, то промені ri з точки S будуть направлені на точки даної площини. На площині відповідні точки будуть розміщені по колу чи по квадрату, як показано на фіг.1. Відстані ri визначаються від точки S до поверхні землі, а не до вказаної площини. При складанні вектора ознак, що представляє собою образ певної ділянки місцевості, відстані ri нормалізуються, від них віднімається відстань SN. Нормалізовані відстані ri будуть компонентами вектора ознак, що представляє відповідний образ. При цьому компоненти вектора ознак можуть мати від'ємний знак, наприклад в тому випадку, коли ЛА знаходиться над ямою чи улоговиною. Як показали експериментальні обчислення, кількість компонент вектора ознак, тобто кількість виміряних відстаней, може бути від восьми до двадцяти. Взагалі кількість компонент вектора ознак залежить головним чином від пересіченості рельєфу. Послідовність компонент вектора ознак створюваного образу і еталона повинна бути однаковою, крім цього, образ x і еталони zi повинні бути однаково орієнтовані відносно сторін світу. Якщо ж ця умова не виконується, то обчислення функції розв'язку виконують n раз, повертаючи кожен раз образ або еталон до найкращого їх співпадання, тобто до отримання найбільшого значення функції розв'язку. Образ x зараховується до того еталона z, для якого d(x) досягає максимального значення. Таким чином визначається, що апарат знаходиться над ділянкою місцевості, що відповідає еталону zi. Радіолокаційні методи і радіовіддалеміри не дозволяють створити вузьконаправлений пучок променів. Отримати потрібні відстані можна з допомогою лазерних віддалемірів. Наприклад лазерні квантові топографічні віддалеміри типу КТД-1 дозволяють вести вимірювання з допомогою вузько-направленого пучка променів. Крім цього, віддалеміри повинні бути відповідно орієнтовані. Такі орієнтуючі пристрої є в топографічних віддалемірах. Швидкість судна і висота над земною поверхнею повинні бути погоджені з тим, щоб виміряти відстані di та виконати необхідні обчислення. Якщо апарат може зависнути нерухомо в певній точці, то ці труднощі відпадають. Обчислення вектора ознак для еталонів ведуть за даними цифрової моделі місцевості чи топографічної карти. Суть цього процесу пояснюється фіг.2. Оскільки ЛА чи судно знаходяться на відомій відстані від земної поверхні SN і кут а теж відомий, то для отримання відстаней SA і SB достатньо мати вертикальні профілі рельєфу місцевості вздовж напрямків NA і NB. При обчисленні довжин променів п для еталонів можливі три випадки, що залежать від профілю місцевості. Якщо місцевість горизонтальна, то промені з точки S перетнуться з земною поверхнею в точках D і C. Їх довжина буде рівна де SN = H, SD = SC = r. На фіг.1 прийнято, що всі кути дорівнюють a. Якщо в напрямі від точки N до точки A є підвищення рельєфу, то ra r. В першому випадку перевищення hi між відмітками біжучих точок профілю і відміткою точки N, центральної точки ділянки, буде позитивним, а в другому випадку негативним. При позитивних перевищеннях по профілю, починаючи від точки N прораховують відношення де I i - горизонтальне положення по відповідному профілю в натуральну величину, тобто на місцевості, від точки, розміщеної на відстані рівній Htga. Іншими словами, від точки D або C до біжучої точки. Крок обчислення tga за формулою (3) залежить від густоти відміток в цифровій моделі чи на топографічній карті. В точці, в якій значення tga = tga обчислюють величину r за формулою де hA - відмітка в точці, в якій значення tga досягло величини tga або перевищило її. На ділянках профілів, близьких до точки N, з від'ємними перевищеннями можна tga не обчислювати, оскільки при цьому промінь не досягає земної поверхні на відрізках ND і NC. При від'ємних значеннях перевищень, коли на ділянці профілю NC не знайдено значення tga = tga, обчислюють значення tga по від'ємних значеннях перевищень для точок, розміщених за точкою C. Для цього знаходять відношення де I i - горизонтальне положення від точки C до біжучої точки з негативним значенням hi. Отримавши значення променя r знаходять за формулою довжину де hb - негативне перевищення, при якому По обчислених довжинах променів ri, віднявши від них висоту судна над поверхнею землі, знаходять вектор ознак еталона Правильність приведеного способу частково перевірена обчислювальними методами. Перевірений процес складання вектора ознак, тобто образів, обчислення функції розв'язку, тобто розпізнавання. Отримані компоненти вектора ознак x або z легко можна перерахувати в компоненти вектора ознак, що використовувався в (Рудый P.M. Распознавание образов локальных участков земной поверхности // Геодезия, картография и аэрофотосъемка. - №46. - 1987. - С.127 - 131), через крутизни ухилів vi з центральної точки образу на крайні точки. За відомими ri і a при позитивному перевищенні а при від'ємному перевищенні де Найскладнішим є процес визначення декількох відстаней одночасно. Точність і надійність даного процесу залежить від віддалемірів, швидкості руху судна, відстані від поверхні землі, рельєфу землі. Найточніше потрібні відстані можуть бути визначені з нерухомого апарату, тобто завислого над певною ділянкою земної поверхні. Однак, оскільки в світловіддалемірах швидкість сигналу на декілька порядків перевищує швидкість повітряних, а тим більше морських суден, то відстані можна надійно виміряти і з рухомих апаратів. Ці дії виконують і в прототипі, тому запропонований спосіб може виконуватись одночасно зі способом, представленим в прототипі, що сприятиме підвищенню надійності розв'язку задачі.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 5/00
Мітки: літаючого, апарата, спосіб, судна, місцеположення, визначення, морського
Код посилання
<a href="https://ua.patents.su/3-24487-sposib-viznachennya-miscepolozhennya-litayuchogo-aparata-abo-morskogo-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення літаючого апарата або морського судна</a>
Лебідковий агрегат для задньої палуби морського дослідницького судна
Номер патенту: 15865
Опубліковано: 30.06.1997
Автор: Тімо Суйстіо
МПК: B66D 1/26
Мітки: морського, палуби, дослідницького, лебідковий, судна, задньої, агрегат
Формула / Реферат:
(57)1. Лебедочный агрегат для задней палубы морского исследовательского судна, содержащий раму, смонтированные на ней по меньшей мере два кабельных катушечных барабана и привод для вращения барабанов, отличающийся тем, что упомянутые барабаны установлены друг над другом, по меньшей мере в одном вертикальном ряду, причем опорный вал одного барабана расположен параллельно опорному валу другого, при этом лебедочный агрегат выполнен с...
Спосіб визначення властивостей грунтів і мінералів морського дна
Номер патенту: 20045
Опубліковано: 25.12.1997
Автори: Сукач Михайло Кузьмич, Сукач Олексій Михайлович, Сукач Сергій Михайлович
МПК: G01N 21/17, G01V 11/00, G01N 21/25
Мітки: визначення, грунтів, дна, мінералів, морського, властивостей, спосіб
Формула / Реферат:
Спосіб визначення властивостей грунтів і мінералів морського дна, який включає освітлення об'єкта, експонування фотоплівки відбитим світлом, її аналіз для визначення спектральних характеристик відбивання і визначення по них фізико-хімічних властивостей грунтів і мінералів, який відрізняється тим, що фотопристрій спускають на задану відстань від дна, обумовлену величиною мутності води та потужністю освітлювача, і експонують фотоплівки не менш,...
Спосіб визначення місцеположення джерел радіовипромінювання і система для його здійснення
Номер патенту: 21335
Опубліковано: 02.12.1997
Автори: Сирма Олексій Олексійович, Литвиненко Валентин Іванович, Лігінов Сергій Михайлович, Мєдвєдєв Сергій Леонідович, Гудзюк Василь Петрович, Муратов Олександр Олексійович
МПК: G01S 5/12
Мітки: радіовипромінювання, здійснення, спосіб, джерел, місцеположення, система, визначення
Формула / Реферат:
1. Способ определения местоположения источников радиоизлучения, заключающийся в приеме сигнала в N пространственно разнесенных измерительных приемных пунктах, идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным измерительным приемным пунктом, а другой (-ие) ретрансляционным (-ными) измерительным (-ными) пунктом (-ами) с переносом спектра радиосигнала, получении за один...
Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Сирма Олексій Олексійович, Муратов Олександр Олексійович, Гудзюк Василь Петрович, Лігінов Сергій Михайлович, Грішін Леонід Андрійович, Литвиненко Валентин Іванович, Мєдвєдєв Сергій Леонідович, Баскаков Юрій Георгійович, Мальцев Вадим Олександрович
Мітки: рухомих, об'єктів, система, ідентифікації, обладнаних, місцеположення, визначення, радіодатчиком
Формула / Реферат:
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход...
Закінцівка профілю аеродинамічної поверхні літаючого апарату
Номер патенту: 16302
Опубліковано: 29.08.1997
Автор: Кулик Віталій Никифорович
МПК: B64C 3/26
Мітки: закінцівка, літаючого, поверхні, профілю, апарату, аеродинамічної
Формула / Реферат:
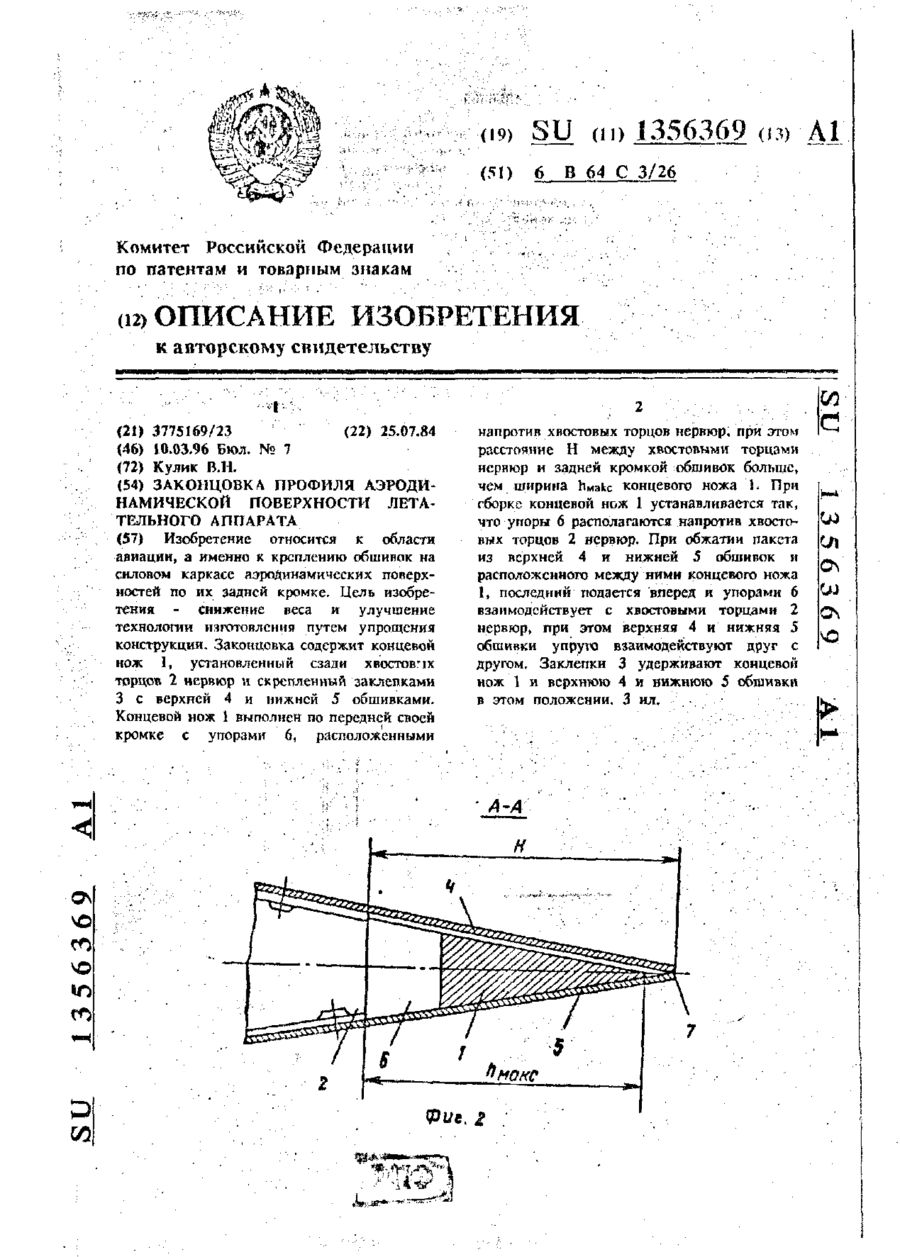
Законцовка профиля аэродинамической поверхности летательного аппарата, содержащая концевой нож с упорами, выполненными на его передней кромке напротив хвостовых торцов нервюр, при этом нож соединен с верхней и нижней обшивками, отличающаяся тем, что, с целью снижения веса и улучшения технологии изготовления путем упрощения его конструкции, расстояние между хвостовыми торцами нервюр и задней кромкой обшивок больше максимальной ширины ножа.
Попередній патент: Спосіб вимірювання механічних напруг і пристрій для його здійснення
Наступний патент: Сцинтіблок для реєстрації гамма-випромінювання та спосіб його виготовлення
Випадковий патент: Робочий орган бульдозера