Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Мєдвєдєв Сергій Леонідович, Баскаков Юрій Георгійович, Мальцев Вадим Олександрович, Сирма Олексій Олексійович, Лігінов Сергій Михайлович, Литвиненко Валентин Іванович, Гудзюк Василь Петрович, Муратов Олександр Олексійович, Грішін Леонід Андрійович
Формула / Реферат
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход которого подключен к выходу устройства сопряжения, а выход подключен к последовательно соединенным формирователю индивидуального кода и сигнала тональной частоты, задающему генератору, усилителю мощности и антенне радиодатчи ка, каждый пост пеленгования включает псленгационную антенную систему, радиоприемный блок, сигнальный вход которого подключен к выходу пс-ленгационной антенной системы, блок опознавания кода, вход которого подключен к первому выходу радиоприемного блока, генератор импульсов, первый выход которого подключен к управляющему входу пеленгационной антенной системы, блок управления, первый вход которого подключен к выходу блока опознавания кода, первый выход подключен к управляющему входу радиоприемного блока, второй выход подключен к управляющему входу генератора импульсов, блок измерения пеленга, выход которого подключен к второму входу блока управления, последовательно соединенные антенну радиостанции и радиостанцию, радиомодем, первый выход которого подключен к второму входу радиостанции, второй выход подключен к третьему входу блока управления, первый вход подключен к третьему выходу блока управления, второй вход подключен к выходу радиостанции, а центральный пост включает последовательно соединенные антенну радиостанции и радиостанцию, радиомодем, первый вход которого подключен к выходу радиостанции, а первый выход к входу радиостанции, последовательно соеди-ненныеантенну радиодатчика и радиодатчик, блок коррекции пеленгов, первый вход которого подключен к второму выходу радиомодема, блок сравнения пеленгов, вход которого объединен с первым входом блока коррекции пеленгов, блок расчета координат, вход которого подключен к выходу блока коррекции пеленгов, блок управления, второй вход которого подключен к выходу блока сравнения пеленгов, третий вход подключен к выходу блока расчета координат, первый выход подключен к второму входу блока коррекции пеленгов, второй выход подключен к второму входу радиомодема, третий выход подключен к входу радиодатчика, блок индикации, вход оторого подключен к четвертому выходу блока управления, отличающаяся тем, что в каждый пост пеленгования введены последовательно соединенные приемная антенна и второй радиоприемный блок, управляющий вход которого объединен с управляющим входом первого радиоприемного блока и блок цифровой обработки, первый вход которого подключен к второму выходу первого радиоприемного блока, второй вход подключен к выходу второго радиоприемного блока, управляющий вход подключен к второму выходу генератора импульсов, а выход подключен к входу блока измерения пеленга, кроме того, в центральный пост введены блок формирования траектории движения подвижного объекта, вход которого подключен к выходу блока расчета координат, а выход подключен к четвертому входу блока управления, и блок определения скорости движения подвижного объекта, вход которого объединен с входом блока формирования траэктории и с третьим входом блока управления, а выход подключен к первому входу блока управления.
Текст
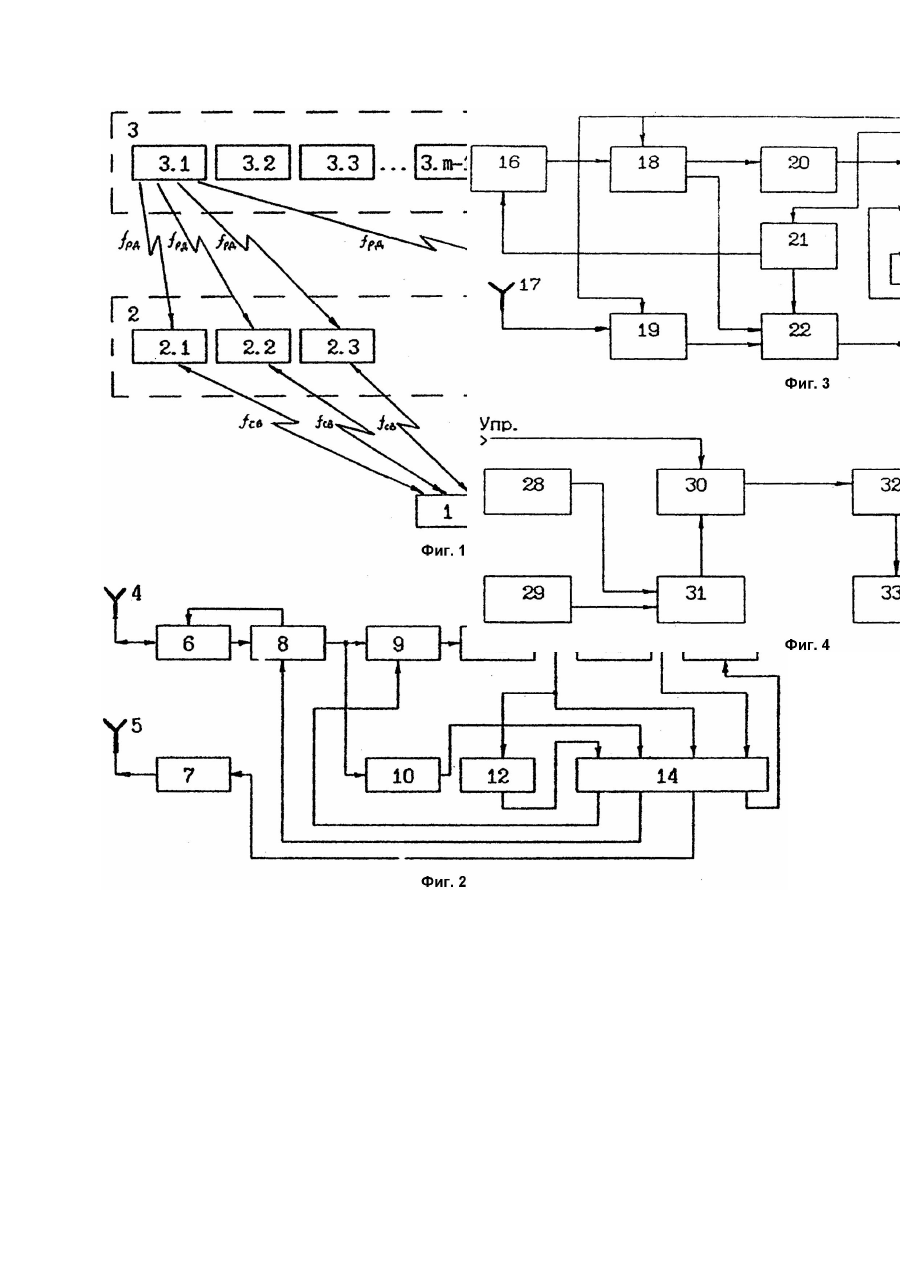
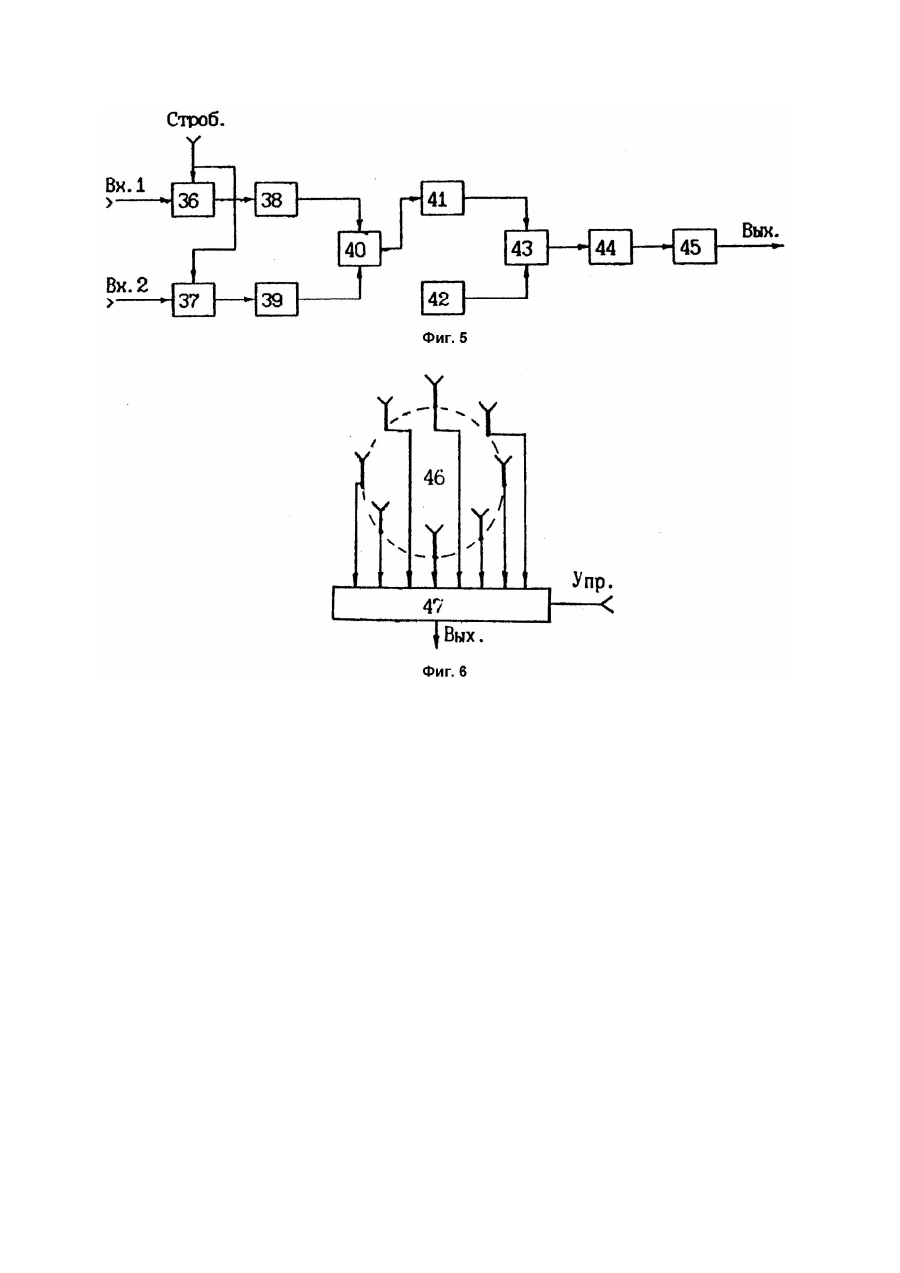
Изобретение относится к радиотехнике, в частности к системам определения координат источников радиоизлучения, и может быть использовано для контроля передвижения патрульных, инкассаторских машин, машин экстренной помощи и других машин специального назначения; для дистанционного обнаружения несанкционированного вскрытия (угона) транспортного средства и определения его местоположения в системах охранной сигнализации; для определения местоположения источника радиопомех, работающего на частоте радиодатчика, с модулированным или немодулированным радиосигналом. Известен способ определения местоположения движущегося объекта, основанный на излучении передатчиком движущегося объекта импульсных радиосигналов с произвольной частотой повторения, приеме этих сигналов в двух разнесенных приемных пунктах с известными координатами, измерении на одном из приемных пунктов временного запаздывания радиосигнала и определении местоположения движущегося объекта относительно известного тракта движения по пересечению с ним гиперболической линии положения (Заявка Великобритании №2256106, кл. G01S5/00, 1991). Система, реализующая данный способ, содержит передатчики, установленные на движущихся объектах, два приемника с измерительными трактами, размещенные на двух известных стационарных пунктах. Недостатками известных способа и системы являются ограниченная область применения из-за необходимости привязки к известному маршруту движения транспортного средства и ограничение по точности определения местоположения, зависящее только от погрешности измерения гиперболической линии положения. Известен способ определения и идентификации подвижных объектов, основанный на излучении сигналов передатчиками подвижных объектов, снабженных индивидуальными кодами, приеме и демодуляции сигналов в N пространственно разнесенных приемных пунктах с известными координатами, причем N больше или равно 3, проведении замеров времени поступления сигналов на каждый приемный пункт, идентификации на каждом приемном пункте подвижных объектов, передачи выявленных индивидуальных кодов объектов и полученных замеров времени поступления сигналов с каждого приемного пункта на центральный пункт с известными координатами, расчете на центральном пункте взаимных задержек принятых в приемных пунктах сигналов, корректировки взаимных задержек на соответствующие поправки и расчете координат подвижных объектов по скорректированным взаимным задержкам (Патент США №4916455, кл. G01S3/02, 1990). Система, реализующая данный способ, содержит передатчики подвижных объектов, N пространственно разнесенных приемных пунктов с известными координатами, причем N больше или равно 3, и центральный пункт с реперным передатчиком с известными координатами. Недостатками известного способа и системы, реализующей этот способ, являются невысокая точность местоопределения и неоднозначность измерения координат объекта. Ограничения в точности местоопределения вытекают из-за невозможности установки единого порогового уровня для всех N приемных пунктов, наличия его временных дрейфов, и наличия ошибок измерения моментов положения синхронизирующих временных меток на приемном пункте. Неоднозначность измерения координат обусловлена недостатками, свойственными гиперболическому методу. Наиболее близким по технической сущности к предложенной системе является способ определения местоположения движущихся источников радиосигналов, заключающийся в приеме радиосигналов моноимпульсными антеннами, расположенными в двух разнесенных друг от друга приемных пунктах с известными координатами, идентификации источника радиоизлучения по пику взаимокорреляционной функции двух принятых сигналов, определении направления на источник радиосигнала при сканировании антенны по. минимальным спектральным компонентам сигналов, принятых по разностным диаграммам направленности антенн, вычислении местоположения источника радиосигнала относительно двух приемных пунктов и определении скорости движения источника радиосигнала при приеме сигналов в третьем приемном пункте при измерении двух разностей доплеровских сдвигов частоты сигналов принимаемых двумя парами антенн, размещенных в приемных пунктах (Заявка Великобритании №2253107, кл. G01S5/02, 5/04, 5/12, 1983). Известная система определения местоположения и идентификации подвижных объектов, выбранная в качестве прототипа, содержит три приемных пункта с моноимпульсными антеннами и измерительными трактами с анализатором спектра. Недостатками известных способа и системы являются, во-первых, ограничение по точности, свойственное моноимпульсному методу измерения угловых координат из-за жестких требований к уровню принимаемого радиосигнала при обработке его до приемного тракта и к амплитудно-фазовым характеристикам приемного тракта при обработке его после приемного тракта. Во-вторых, сложность технической реализации определения скорости движения низкоскоростных объектов по доплеровскому сдвигу частоты, что приводит к ограничению области применения системы. В основу изобретения поставлена задача создания системы определения местоположения и идентификации подвижных. объектов, оборудованных радиодатчиком, путем определения пеленга из нескольких пространственно разнесенных приемных пунктов на подвижный объект по излучению радиодатчика сигнала с индивидуальным кодом при реализации цифровых методов обработки квадратурных компонент сигнала на приемных пунктах, применения статистических методов оптимизации обработки избыточной информации о местоположении объекта на центральном пункте, определения параметров движения объекта и определения местоположения источника радиопомех, работающего на частоте радиодатчика, с модулированным или немодулированным радиосигналом, позволяющая обеспечить повышение точности определения местоположения подвижных объектов и эффективности использования системы. Это достигается тем, что в систему определения местоположения и идентификации подвижных объектов, содержащую радиодатчики подвижных объектов (РДПО), N пространственно разнесенных постов пеленгования (ПП) с известными координатами, причем N больше или равно 3, и центральный пост (ЦП) с известными координатами, причем каждый РДПО включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устройство управления, один вход которого подключен к выходу устройства сопряжения, а выход подключен к последовательно соединенным формирователю индивидуального кода и сигнала тональной частоты, задающему генератору, усилителю мощности и антенне радиодатчика, каждый ПП включает пеленгационную антенную систему, радиоприемный блок, сигнальный вход которого подключен к выходу пеленгационной антенной системы, блок опознавания кода, вход которого подключен к первому выходу радиоприемного блока, генератор импульсов, первый выход которого подключен к управляющему входу пеленгационной антенной системы, блок управления, первый вход которого подключен к выходу блока опознавания кода, первый выход подключен к управляющему входу радиоприемного блока, второй выход подключен к управляющему входу генератора импульсов, блок измерения пеленга, выход которого подключен к второму входу блока управления, последовательно соединенные антенну радиостанции и радиостанцию, радиомодем, первый выход которого подключен к второму входу радиостанции, второй выход подключен к третьему входу блока управления, первый вход подключен к третьему выходу блока управления, второй вход подключен к выходу радиостанции, а ЦП включает последовательно соединенные антенну радиостанции и радиостанцию, радиомодем, первый вход которого подключен к выходу радиостанции, а первый выход к второму входу радиостанции, последовательно соединенные антенну радиодатчика и радиодатчик, блок коррекции пеленгов, первый вход которого подключен к второму выходу радиомодема, блок сравнения пеленгов, вход которого объединен с первым входом блока коррекции пеленгов, блок расчета координат, вход которого подключен к выходу блока коррекции пеленгов, блок управления, второй вход которого подключен к выходу блока сравнения пеленгов, третий вход подключен к выходу блока расчета координат, первый выход подключен к второму входу блока коррекции пеленгов, второй выход подключен к второму входу радиомодема, третий выход подключен к входу радиодатчика, блок индикации, вход которого подключен к четвертому выходу блока управления, в каждый ПП введены последовательно соединенные приемная антенна и второй радиоприемный блок, управляющий вход которого объединен с управляющим входом первого радиоприемного блока и блок цифровой обработки, первый вход которого подключен к второму выходу первого радиоприемного блока, второй вход подключен к выходу второго радиоприемного блока, управляющий вход подключен к второму выходу генератора импульсов, а выход подключен к входу блока измерения пеленга, в ЦП введены блок формирования траектории движения подвижного объекта, вход которого подключен к выходу блока расчета координат, а выход подключен к четвертому входу блока управления, и блок определения скорости движения подвижного объекта, вход которого объединен с входом блока формирования траектории и с третьим входом блока управления, а выход подключен к первому входу блока управления. Сопоставительный анализ с прототипом показывает, что предложенная система отличается наличием новых блоков и новых связей между введенными блоками и остальными блоками в структурных элементах системы. В связи с этим предложенная система соответствует критерию изобретения "новизна". При изучении других известных технических решений в данной области техники совокупность признаков, отличающая изобретение от прототипа, не была выявлена, что обеспечивает соответствие критерию "изобретательский уровень". Повышение точности определения местоположения подвижных объектов в заявляемой системе обеспечивается за счет уменьшения погрешности измерения пеленга вследствие увеличения отношения сигнал/шум на выходе приемного тракта при введении блока цифровой обработки квадратурных компонент сигнала, реализующего оптимальный обнаружитель корреляционного типа. Кроме того, структурная избыточность системы (при N больше или равно 3) также обеспечивает повышение точности определения местоположения за счет оптимизации обработки первичных оценок местоположения, получаемых при пересечении пеленгов на подвижный объект, на базе байесовских методов, основанных на минимизации среднего риска и использовании отношения правдоподобия, например, метода максимального правдоподобия, который при нормальном законе распределения погрешностей пеленгов сводится к методу наименьших квадратов. Повышение эффективности использования системы обеспечивается расширением ее функциональных возможностей, а именно: определение параметров движения объекта (траектории и скорости) при введении на ЦП блоков формирования траектории и определения скорости; определение местоположения источников помех, работающих на частоте радиодатчика, с модулированным или немодулированным радиосигналом, при введении на ПП приемной антенны и второго радиоприемного блока, которые позволяют устранить ошибки при измерении пеленга на источники излучений с частотно-модулированными радиосигналами, исключая при обработке сигнала компоненты частотной модуляции. На фиг.1 приведена структурная схема системы определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком; на фиг.2 структурная электрическая схема центрального поста; на фиг.3 - структурная электрическая схема поста пеленгования; на фиг.4 - структурная электрическая схема радиодатчика; на фиг.5 структурная электрическая схема блока цифровой обработки; на фиг.6 - структурная электрическая схема пеленгационной антенной системы. Система определения местоположения и идентификации подвижных объектов содержит центральный пост (фиг. 1) постов пеленгования причем больше или равно 3, и требуемое количество радиодатчиков подвижных объектов (РДПО) Центральный пункт 1 (фиг.2) содержит антенну радиостанции (АРС) 4, антенну радиодатчика (АРД) 5, радиостанцию (PC) 6, радиодатчик (РД) 7, радиомодем (РМ) 8, блок коррекции пеленгов (БКП) 9, блок сравнения пеленгов (БСП) 10, блок расчета координат (БРК) 11, блок определения скорости (БОС) 12, блок формирования траектории (БФТ) 13, блок управления (БУ) 14 и блок индикации (БИ) 15. Каждый пост пеленгования 2.n (фиг.3) содержит пеленгационную антенную систему (ПАС) 16, приемную антенну (ПА) 17, первый и второй радиоприемные блоки (РПБ) 18, 19, блок опознавания кода (БОК) 20, генератор импульсов (ГИ) 21, блок цифровой обработки (БЦО) 22, блок управления (БУ) 23, блок измерения пеленгов (БИП) 24, антенну радиостанции (АРС) 25, радиостанцию (PC) 26 и радиомодем (РМ) 27. Каждый радиодатчик подвижного объекта 3.m (фиг.4) содержит датчик дверей (ДД) 28, вибродатчик (БД) 29, устройство управления (УУ) 30, устройство сопряжения с датчиками (УСД) 31, формирователь индивидуального кода и сигнала тональной. частоты (ФИКиСТЧ) 32, задающий генератор с модулятором (ЗГМ) 33, антенну радиодатчика (АРД) 34 и усилитель мощности (УМ) 35. Блок цифровой обработки 20 (фиг.5) содержит первый и второй ключи (Кл) 36 и 37, первый и второй аналого-цифровые преобразователи (АЦП) 38 и 39, первый умножитель комплексных чисел (УКЧ) 40, оперативное запоминающее устройство (ОЗУ) 41, постоянное запоминающее устройство (ПЗУ) 42, второй умножитель комплексных чисел (УКЧ) 43, векторный сумматор (ВС) 44 и функциональный преобразователь вида Пеленгационная антенная система 14 (фиг.6) содержит антенную систему (АС) 46 из восьми симметричных полуволновых вибраторов, расположенных по окружности и коммутатора (К) 47. Система определения местоположения и идентификации подвижных объектов работает следующим образом. После развертывания системы на местности предварительно включают режим "КАЛИБРОВКА", для чего на ЦП 1 с второго выхода БУ 14 на вход РД 7 подают команду на включение РД 7. Антенна радиодатчика 5 периодически с периодом длительность которого изменяется по псевдослучайному закону, излучает радиосигналы выделяют код РД и сравнивают его с индивидуальным кодом РД 7 центрального поста 1. При совпадении кодов с выхода БОК 20 на первый вход БУ 23 подают сигнал опознавания, по которому пост переходит к непосредственному пеленгованию РД 7 доплеровским способом. При этом с второго выхода БУ 23 на вход ГИ 21 подается команда включения ГИ 21, с первого выхода которого импульсы коммутации с частотой поступают на управляющий вход К 47 в пеленгационной антенной системе 16, а с второго выхода стробовые импульсы с частотой поступают на управляющий вход БЦО 22. Таким образом, вторая немодулированная индивидуальным кодом часть радиосигнала РД 7 принимается ПАС 16 всех ПП уже при коммутации ее антенных элементов. Радиосигнал РД 7 центрального поста 1 принимается также и ПА 17 всех ПП, с выхода которой он поступает на вход второго РПБ 19. С второго выхода первого РПБ 18 сигнал вида где - постоянная величина и - промежуточная частота радиосигнала; - радиус окружности антенной системы; - длина волны радиосигнала; - частота коммутации антенных элементов; - пеленг на радиодатчик, подают на первый сигнальный вход БЦО 22, а с выхода второго РПБ 19 сигнал вида подают на второй вход БЦО 22. В блоке цифровой обработки 22 эти сигналы поступают соответственно на сигнальные входы первого и второго ключей 36 и 37, на управляющие входы которых с второго выхода ГИ 21 подают последовательность стробовых импульсов. Формирующих на выходах ключей 36 и 37 по алгоритму скользящего суммирования сигнальные выборки, воспроизводящие из принятого реального сигнала вида аналитический комплексный сигнал где и - действительная и мнимая части квадратурных компонент сигнала. Сигнальные выборки с выходов первого и второго Кл 36 и 37 поступают соответственно на входы первого и второго АЦП 38 и 39. После оцифровки с выхода первого АЦП 38 на первый вход первого УКЧ 40 поступает комплексный сигнал, который в векторной форме имеет вид длительностью на частоте состоящие из модулированной индивидуальным кодом и немодулироэанной частей. В исходном состоянии в ПАС 16 всех ПП к сигнальному входу первого РПБ 18 подключен только один из восьми антенных элементов. Принятый ПАС 16 всех ПП и усиленный РПБ 18 радиосигнал, с первого выходе, где - номер цифрового отсчета на выходе АЦП, - шаг интервала дискретизации, а с выхода второго АЦП 39 на второй вход первого УКЧ 40 поступает комплексный сигнал вида РПБ 18 на промежуточной частоте подают на вход БОК 20, где после демодуляции его С выхода первого УКЧ 40 в результате "свертки" двух сигналов на вход ОЗУ 41 поступает сигнал вида С выхода ОЗУ 41 этот сигнал считывают на первый вход второго УКЧ 43, на второй вход которого с выхода ПЗУ 42, хранящего 360 сигналов-образов, считывают сигнал вида где С выхода второго УКЧ 43 на вход ВС 44 поступает сигнал вида В векторном операцию вида сумматоре 44 выполняют (то есть раздельное векторное суммирование действительных и мнимых частей сигнала), результаты которой поступают в ФП 45 вида образующий взаимокорреляционной функции, максимум при сигнал имеющей соответствующий одному из 360 значений С выхода ФП 45 сигнал взаимокорреляционной функции подают на вход БИП 24, где по максимуму определяют пеленг на РД 7 центрального поста 1. С выхода БИП 24 значение пеленга подают на второй вход БУ 23, с третьего выхода которого - на первый вход РМ 27 и далее с первого выхода РМ 27 на вход PC 26. Каждый ПП по цифровому радиоканалу на частоте поочередно передает на ЦП 1 свои значения пеленга на РД 7 центрального поста 1. Данные о пеленгах, принятые на ЦП 1 радиостанцией 6 и радиомодемом 8 поступают на вход БСП 10 (блок коррекции пеленгов в режиме "КАЛИБРОВКА" не работает), где каждый измеренный пеленг сравнивается с соответствующим расчетным значением пеленга каждого ПП на РД 7 центрального поста 1. По результатам сравнения БСП 10 формирует пеленгационные поправки, которые с выхода БСП 10 поступают на второй вход БУ 14 для запоминания и последующего использования для коррекции пеленгов в режиме работы "МЕСТООПРЕДЕЛЕНИЕ". Режим работы "МЕСТООПРЕДЕЛЕНИЕ" имеет три подрежима, а именно: определение по. запросу ЦП 1 местоположения служебных транспортных средств, оснащенных радиодатчиками и радиостанциями с радиомодемами; дистанционное обнаружение несанкционированного вскрытия (угона) транспортного средства, оснащенного радиодатчиком, и определение его местоположения; определение местоположения источника радиопомех, работающего на частоте радиодатчика, с модулированным и немодулированным радиосигналом. Подрежим дистанционного обнаружения несанкционированного вскрытия (угона) транспортного средства является приоритетным по отношении к первому подрежиму. Третий подрежим используется в случае необходимости по команде ЦП 1, передаваемой по цифровому радиоканалу на ПП. При определении местоположения служебного транспортного средства по запросу с ЦП 1 на это средство по цифровому радиоканалу передается команда, по которой включается радиодатчик подвижного объекта З.т. Посты пеленгования 2.п системы работают аналогично режиму "КАЛИБРОВКА". Данные о пеленгах на РД 3.m, принятые ЦП 1 от всех ПП 2.n, со второго выхода РМ 8 поступают на вход БКП 9 (БСП 10 в режиме "МЕСТООПРЕДЕЛЕНИЕ" не работает), на второй вход которого с первого выхода БУ 14 поступают значения пеленгационных поправок. В блоке коррекции пеленгов 9 производят коррекцию пеленгов и откорректированные значения их подают на вход БРК 11. В блоке расчета координат 11 по пересечениям пеленгов получают первичные оценки местоположения транспортного средства, количество которых определяется выражением где - количество постов пеленгования в системе. Для получения наиболее правдоподобной оценки местоположения транспортного средства при вычислении координат в БРК 11 используют статистические методы оптимизации обработки избыточной информации, причем при равным от 3 до 5 включительно, используется метод наименьших квадратов, а при больше 5 - метод усреднения. С выхода БРК 11 значения координат транспортного средства поступают на третий вход БУ 14, вход БФТ 13 и вход БОС 12. В блоке формирования траектории 13 по получаемым отсчетам координат методом интерполяции строится траектория движения транспортного средства, данные о которой с выхода БФТ 13 поступают на четвертый вход БУ 14. В блоке определения скорости 12 производят определение скорости движения транспортного средства дифференцированием координат положения транспортного средства по времени на отрезке (отрезках) траектории движения, соответствующих временному интервалу, равному периоду (сумме периодов излучения сигнала радиодатчиком внутри выбранного отрезка траектории. Данные о скорости движения транспортного средства с выхода БОС 12 поступают на первый вход БУ 14 в виде дискретных значений С четвертого выхода БУ 14 данные о координатах, траектории и скорости движения транспортного средства поступают на БИ 15 для отображения, причем координаты и траектория отображаются на фоне цветной карты местности, а скорость - в окне отображения буквенно-цифровой информации. В подрежиме дистанционного обнаружения несанкционированного вскрытия (угона) транспортного средства, оснащенного радиодатчиком, и определения его местоположения включение радиодатчика 3.m происходит при срабатывании датчика дверей 28 или вибродатчика 29 и в дальнейшем система работает аналогично подрежиму, определения местоположения служебного транспортного средства по запросу с ЦП 1. В подрежиме определения местоположения источника радиопомех система работает аналогично вышеописанному за исключением того, что блок опознавания кода 20 постов пеленгования 2.n в случае не опознания кода выдает в блок управления 23 сигнал неопознавания, на основании которого БУ 23 формирует сообщение для центрального поста 1, передаваемое по цифровому радиоканалу (радиомодем 27, радиостанция 26, антенна 25). Центральный пост 1 по принятым сообщениям от ПП 2.n передает команду на ПП 2.n на переход к операции пеленгования без процедуры опознавания. Для подтверждения возможности повышения точности определения местоположения и эффективности использования системы на современных серийно выпускаемых элементной базе и покупных комплектующих изделиях разработан, изготовлен и испытан опытный образец системы определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком. В постах пеленгования пеленгационная антенная система 16, приемная антенна 17, радиоприемные блоки 18, 19 являются изделиями собственной разработки. Блок опознавания кода 20, генератор импульсов 21, блок цифровой обработки 22, блок управления 23 и блок измерения пеленгов 24 являются также изделиями собственной разработки и выполнены в виде специализированного вычислителя на базе аппаратно-программного комплекса ввода-вывода аналоговых сигналов на плате стандарта В центральном посту блок коррекции пеленгов 9, блок сравнения пеленгов 10, блок расчета координат 11, блок определения скорости 12, блок формирования траектории 13, блок управления 14 и блок индикации 15 выполнены на базе комплекта ПЭВМ Программное обеспечение реализовано в среде Windows с помощью компилятора Borland Pascal и библиотеки Object Windows Library. Радиомодем 8 и 27 в центральном и пеленгационном постах соответственно является изделием собственной разработки. Радиодатчики подвижных объектов 3.m, антенна 5 и радиодатчик 7 центрального поста являются также изделиями собственной разработки. В качестве антенны 4 и 25, радиостанции 6 и 26 на центральном и пеленгационном постах соответственно использован комплект серийно выпускаемой радиостанции "Виола-АС". Система при количестве постов пеленгования равном 5 была размещена в городских условиях по периметру окружности радиусом 10км и центральным постом, размещаемым произвольно, но при удалении от самого дальнего поста пеленгования не более 15км. В результате экспериментальных исследований получены следующие основные характеристики системы: инструментальная среднеквадратическая погрешность измерения координат транспортных средств Таким образом, использование в предложенной системе определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, следующих отличительных признаков: измерение пеленга на источник радиоизлучения на основе цифровых методов обработки квадратурных компонент сигнала; определение траектории и скорости движения подвижного объекта; определение местоположения источников радиопомех, работающих на частоте радиодатчика, с модулированным или немодулированным радиосигналом позволяет по сравнению с прототипом, а также с другими известными техническими решениями в данной области повысить точность определения местоположения подвижных объектов и эффективность использования системы. Принципиальное отличие предложенной системы заключается в ее гибкости по функциональному назначению, по возможности создания объединенных сетей системы, охватывающих большие территории. Эта система одновременно может быть как системой специального назначения, выполняя контроль передвижения патрульных, инкассаторских машин, машин экстренной помощи и др., так и коммерческой системой, выполняя функции дистанционного обнаружения несанкционированного вскрытия (угона) транспортного средства (автомобиля), оснащенного радиодатчиком, и определения его местоположения с отображением информации об автомобиле на экране ПЭВМ (марка, цвет, государственный номер, фамилия владельца, характерные приметы и т.п.). Наличие информации о траектории и скорости движения автомобиля на экране ПЭВМ, а также о патрульных машинах, находящихся вблизи угнанного автомобиля позволяет принять наиболее эффективные меры по пресечению угона. Наличие в системе возможности определения местоположения источников радиопомех (стационарных или мобильных), работающих на частотах радиодатчика, и вследствие этого быстрой ликвидации их, позволяет оперативно восстанавливать работоспособность системы.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determination of location and identification of movable objects equipped with radio-indicator
Автори англійськоюBaskakov Yurii Heorhiiovych, Lihinov Serhii Mykhailovych, Hudziuk Vasyl Petrovych, Lihinov Serhii Mykhailovych, Lytvynenko Valentyn Ivanovych, Maltsev Vadym Oleksandrovych, Medvediev Serhii Leonidovych, Muratov Oleksandr Oleksiiovych, Syrma Oleksii Oleksiiovych
Назва патенту російськоюСистема определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком
Автори російськоюБаскаков Юрий Георгиевич, Лигинов Сергей Михайлович, Гудзюк Василий Петрович, Лигинов Сергей Михайлович, Литвиненко Валентин Иванович, Мальцев Вадим Александрович, Медведев Сергей Леонидович, Муратов Александр Алексеевич, Сирма Алексей Алексеевич
МПК / Мітки
Мітки: місцеположення, об'єктів, система, ідентифікації, радіодатчиком, визначення, обладнаних, рухомих
Код посилання
<a href="https://ua.patents.su/7-20426-sistema-viznachennya-miscepolozhennya-i-identifikaci-rukhomikh-obehktiv-obladnanikh-radiodatchikom.html" target="_blank" rel="follow" title="База патентів України">Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком</a>
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Кизилов Володимир Улянович, Давидов Анатолій Семенович
МПК: G01R 11/00
Мітки: електроенергії, лічильник
Формула / Реферат:
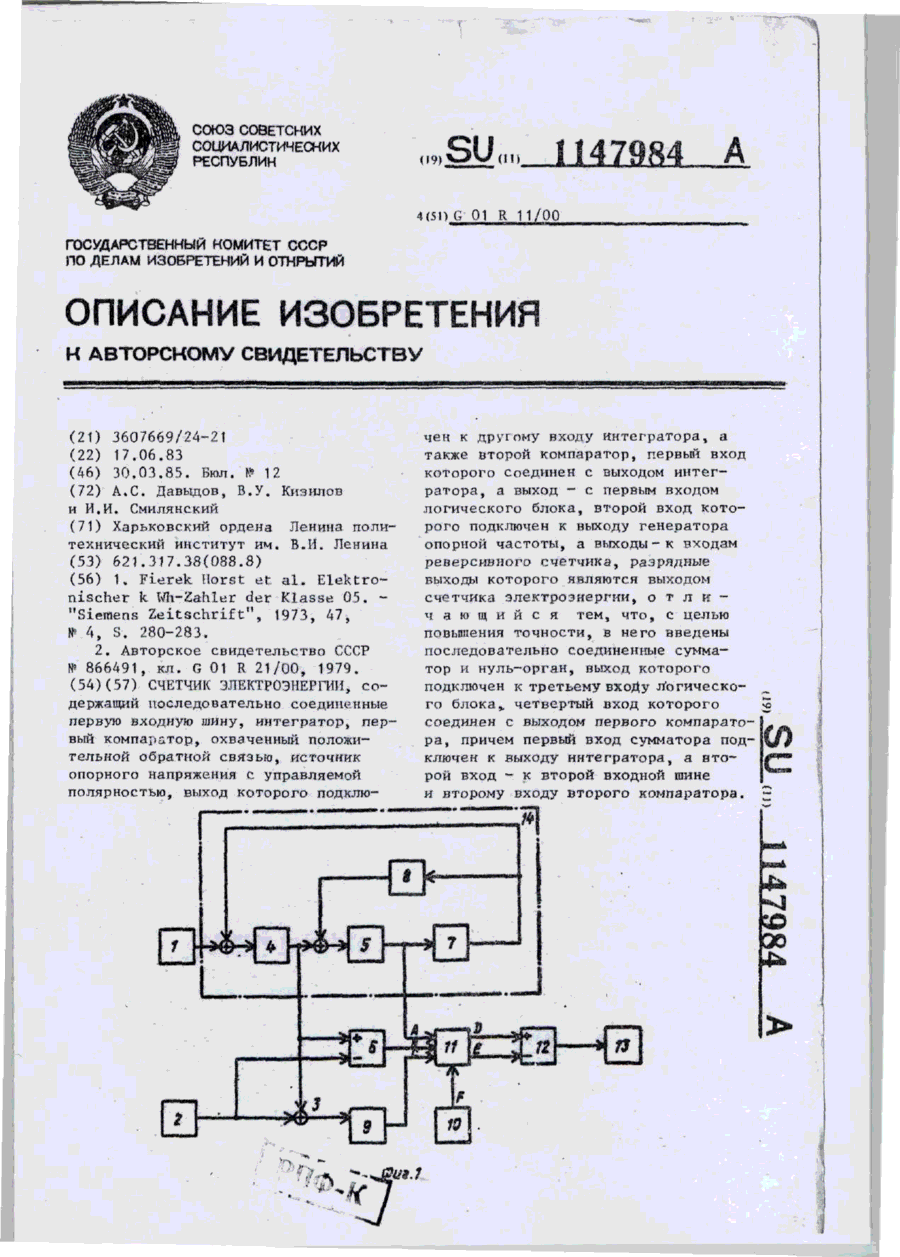
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Система телемеханіки
Номер патенту: 7702
Опубліковано: 26.12.1995
Автори: Верховський Яків Маркович, Прошин Володимир Володимирович, Лагунович Євген Федорович, Сидяк Володимир Олександрович
МПК: G08C 19/28
Мітки: система, телемеханіки
Формула / Реферат:
Система телемеханики, содержащая на пункте управления генератор импульсов, первый и второй распределители импульсов, первый и второй формирователи импульсов, первый выход первого распределителя подключен к входу второго распределителя и к первому входу первого формирователя импульсов, первый и второй выходы последнего соединены соответственно с первой и второй шинами линии связи, последний выход второго распределителя подключен к...
Спосіб визначення електричної потужності та пристрій для його здійснення
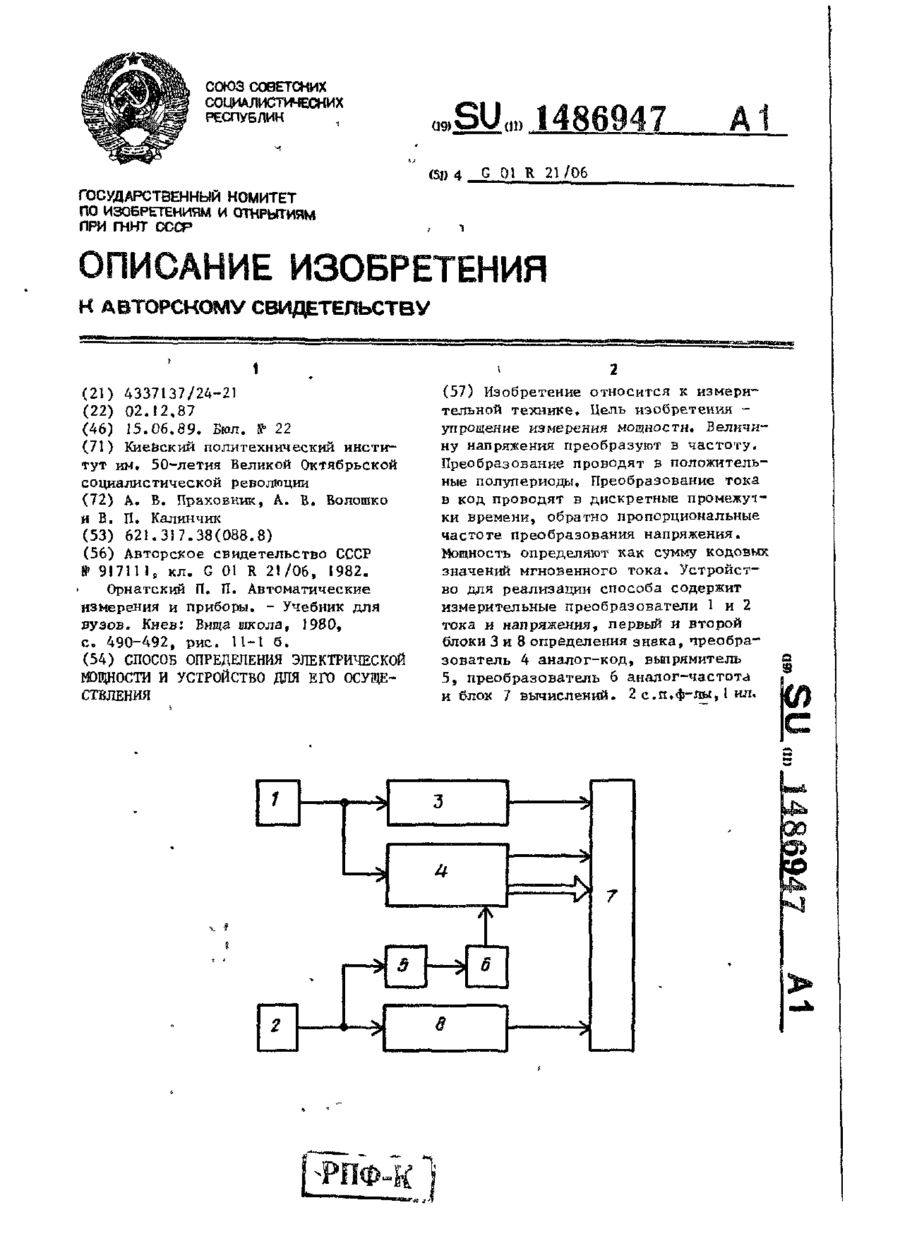
Номер патенту: 14063
Опубліковано: 25.04.1997
Автори: Калінчик Василь Прокопович, Праховник Артур Веніамінович, Волошко Анатолій Васильович
МПК: G01R 21/06
Мітки: спосіб, пристрій, визначення, здійснення, потужності, електричної
Формула / Реферат:
1. Способ определения электрической мощности, заключающийся в том, что измеряют мгновенные значения тока и преобразуют их в код, отличающийся тем, что, с целью упрощения измерения мощности, величину напряжения в положительные полупериоды преобразуют в частоту fi, осуществляют преобразование тока в код в дискретные промежутки времени Dti = 1/f1, a мощность определяют по формулегде К - постоянный коэффициент;Т - период...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Носулько Віктор Дмитрович, Кизилов Володимир Улянович
МПК: G01R 31/08
Мітки: відстані, замикання, вимірювач, короткого, місця
Формула / Реферат:
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Пристрій для автоматичного визначення часу фільтрування
Номер патенту: 101
Опубліковано: 30.04.1993
Автор: Воробйов Євгеній Ігоревич
МПК: B01D 37/00
Мітки: визначення, пристрій, часу, фільтрування, автоматичного
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Устройство для автоматического определения времени фильтрования, содержащее расходомер, установленный на выходном продуктопроводе, интегратор, вход которого связан с выходом расходомера, сумматор, выход которого соединен через нулевое реле с запорным органом на входе фильтра, и блок умножения, первый вход которого связан с выходом блока нелинейности, а выход — с первым входом сумматора, второй вход...
Попередній патент: Мікрохвильовий багатозондовий мультиметр
Наступний патент: Пристрій для змішування та гранулювання сипучих матеріалів
Випадковий патент: Пристрій для очищення оптичних головок зчитування інформації з компакт-дисків типу blue-ray