Привод каретки плосков’язальної машини
Номер патенту: 24505
Опубліковано: 21.07.1998
Автори: Хомяк Володимир Антонович, Яковлев Юрій Олександрович, Піпа Борис Федорович
Формула / Реферат
Привод каретки плосковязальной машины, включающий восьмизвенный рычажный механизм, состоящий из кривошипа, шатуна, коромысла, кулисы, кулисного камня, тяги и ползуна каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством рычажного механизма, счетное устройство в виде храпового механизма, храповое колесо которого установлено на одном валу с кулачками и кинематически связано с кривошипом, отличающийся тем, что привод дополнительно содержит шарнир кулисы, выполняющий роль подвижной управляемой опоры и связывающий программное устройство с восьмизвенным рычажным механизмом, а кулисный камень соединен непосредственно с коромыслом.
Текст
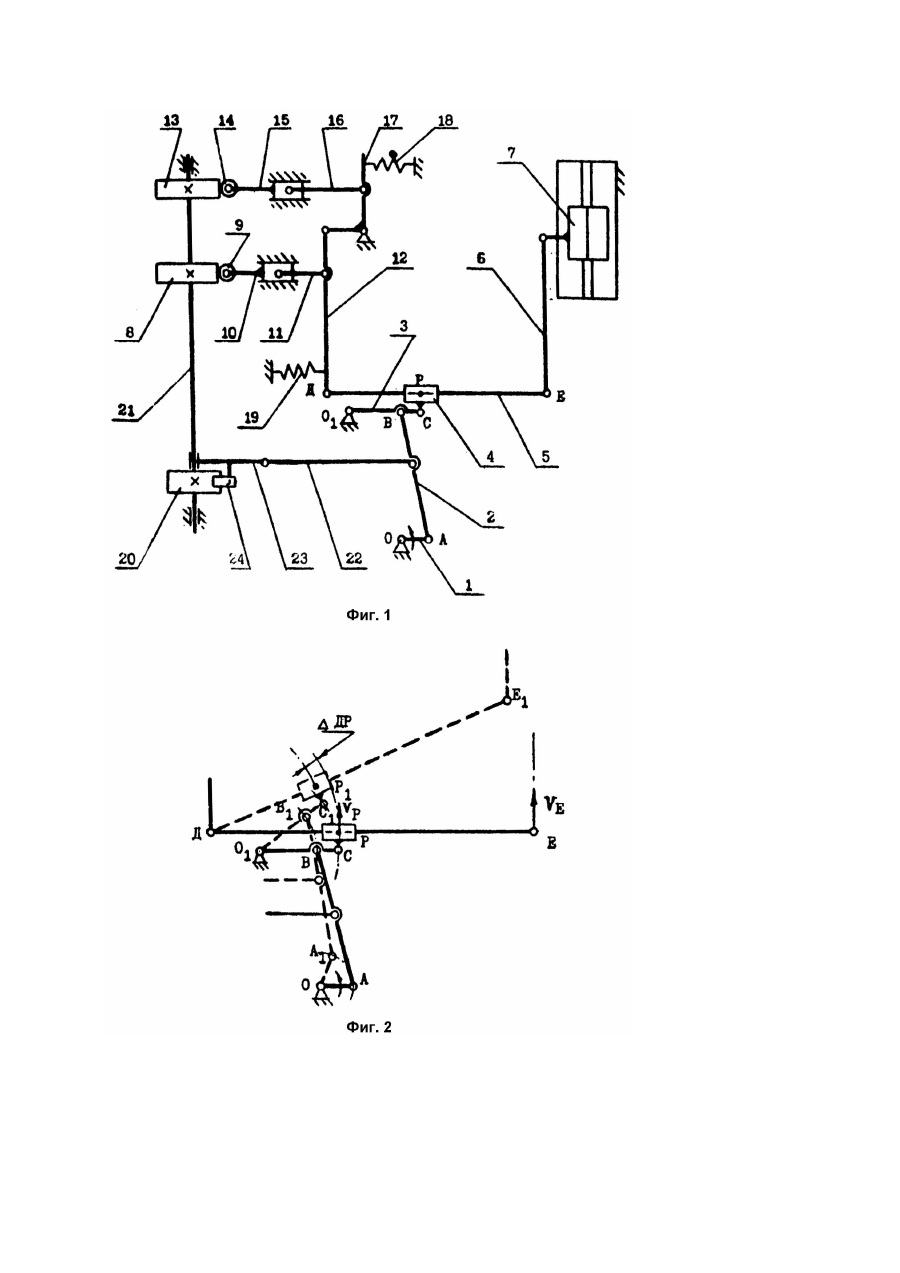
Изобретение относится к области трикотажного машиностроения, в частности, к приводам каретки плосковязальных машин. Известны приводы каретки плосковязальной машины, содержащие каретку, через промежуточный ползун связанную с цепной передачей, от которой получают возвратнопоступательное движение (Присяжнюк П. А. Наладка и эксплуатация плосковязальных трикотажных машин. - К.: Техника, 1983. - С.8 - 10, 20 - 24, 29 - 34, 37 - 41). Существенным признаком этих механизмов является возможность управления величиной хода каретки с помощью концевых переключателей, в зависимости от заложенной программы, что позволяет избежать холостых выбегов каретки за пределы зоны вязания при выработке цельновязанных изделий сложной формы. Таким механизмам присущи ограниченность изменения величины хода каретки -получают криволинейный контур с углами наклона в пределах 20 - 60°, невозможность изменения осевой линии хода каретки, необходимость предварительной установки ползушек переключателей в исходное положение вручную перед началом вязания, ограниченность скорости перемещения каретки. Известны также приводы каретки плосковязальной машины (Развитие и возможности автоматических перчаточных машин. Development and Potential of Automatic Glove Machines. Knit. Int., 1979, vol.8, №1032, p.41. Англ.), содержащие кулачок для управления положением осевой линии хода каретки, средство для управления величиной хода каретки, кинематически связанные с кареткой посредством шарнирно-рычажного механизма. Средство для управления величиной хода каретки представляет собой два ведомых эксцентрика, связанные зубчатой передачи. Эксцентрики через шатуны кинематически связаны с промежуточными ползунами. Ползун шарнирно-рычажного механизма, входя в зацепление с одним из промежуточных ползунов, приводит в движение каретку. Такой привод позволяет осуществить процесс вязания определенных цельновязанных изделий сложной формы с оптимальным ходом каретки, т.е. без холостых выбегов каретки за пределы зоны вязания, в частности, при выработке перчаточных изделий. Кроме того, заложенный в основу привода шарнирнорычажный механизм позволяет получать более высокие скорости перемещения каретки, являясь более устойчивым в динамическом отношении. Ограничивает применение такого механизма то, что каретка может совершать возвратнопоступательное движение только с одним из двух заложенных в эксцентриках размахов. Поэтому минимально необходимый ход каретке обеспечивается лишь при выработке конкретного ассортимента изделий и размеров этих изделий. Известен также привод каретки плосковязальной машины (А.с. СССР №1730266, 30.04.92), включающий восьмизвенный рычажный механизм, состоящий из кривошипа, шатуна, коромысла, кулисы, кулисного камня, тяги и ползуна каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством рычажного механизма, счетное устройство в виде храпового механизма, храповое колесо которого установлено на одном валу с кулачками и кинематически связано с кривошипом. Управление величиной хода каретки и положением осевой линии хода каретки позволяет расширить технологические возможности плосковязальной машины, а также уменьшить холостые выбеги каретки до минимально необходимых значений. Кроме того, восьмизвенный шарнирно-рычажный механизм лежащий в основе привода, обеспечивает ему устойчивость в динамическом отношении. Однако, приводу присуща синусоидальная форма закона изменения скорости движения каретки. Максимальная линейная скорость каретки, соответствующая экстремуму синусоиды (достигается в середине хода каретки) и определяющая максимальные нагрузки на перерабатываемые нити и динамические усилия в петлеобразующих органах, ограничивает таким образом повышение производительности за счет увеличения скоростных режимов. Кроме того, непостоянство скорости движения каретки на участках рабочего хода отрицательно сказывается на равномерности петельной структуры вырабатываемого трикотажа и, следовательно, качестве производимых изделий. В основу изобретения положена задача создания такого привода каретки плосковязальной машины, в котором новая кинематическая цепь звеньев позволила бы приблизить закон изменения скорости движения каретки к оптимальной трапецеидальной форме, благодаря чему возрастет, производительность плосковязальной машины и повысится качествовырабатываемого трикотажа. Указанная задача решена тем, что в приводе, включающем восьмизвенный рычажный механизм, состоящий из кривошипа, шатуна, коромысла, кулисы, кулисного камня, тяги и ползуна каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством рычажного механизма, счетное устройство в виде храпового механизма, храповое колесо которого установлено на одном валу с кулачками и кинематически связано с кривошипом, согласно изобретению, дополнительно содержится шарнир кулисы, выполняющий роль подвижной управляемой опоры и связывающий программное устройство с восьмизвенным рычажным механизмом, а кулисный камень соединен непосредственно с коромыслом. Такое техническое решение - введение в восьмизвенный рычажный механизм, лежащий в основе привода, шарнира кулисы, выполняющего роль подвижной управляемой опоры и связывающего программное устройство с восьмизвенным рычажным механизмом, и соединение кулисного камня непосредственно с коромыслом, позволяет в цикле хода каретки получать на кулисе переменное плечо передачи движения от кулисного камня относительно оси шарнира кулисы. Это дает возможность приблизить закон изменения скорости движения каретки к трапецеидальной форме, что, в свою очередь, обеспечивает увеличение средней скорости цикла и пропорционально производительности, по сравнению с механизмом, создающим синусоидальный закон движения каретки, при равенстве максимальных линейных скоростей в рассматриваемых законах движения каретки. Кроме того, приближение скорости движения каретки на участках петлеобразования к постоянной положительно скажется на равномерности петельной структуры вырабатываемого трикотажа и, следовательно, качестве производимых изделий. На фиг.1 изображена кинематическая схема предлагаемого привода каретки плосковязальной машины; на фиг.2 - схема изменения положений звеньев привода в цикле движения каретки. Предлагаемый привод (фиг.1) содержит кривошип 1, через шатун 2 связанный с коромыслом 3, а далее через камень 4 кулисы, кулису 5, тягу 6 с кареткой 7. Управление величиной хода каретки осуществляется кулачком 8, связанным через ролик 9, ползун 10, шатун 11с рычагом 12 и кулисой 5. Управление положением осевой линии хода каретки осуществляемся кулачком 13, связанным через ролик 14, ползун 15, шатун 16, серьгу 17, рычаг 12 с кулисой 5. Пружины 18 и 19 обеспечивают силовое замыкание механизма, Храповое колесо 20, установленное вместе с кулачками 8 и 13 на валу 21, сообщает кулачкам прерывистое вращательное движение на каждый полный оборот кривошипа 1. Храповое колесо 20 связано с кривошипом 1 через шатун 2, рычаг 22, коромысло 23, на котором крепится собачка 24. Обозначим шарниры кривошипа 1, шатуна 2, коромысла 3, кулисы 5 и тяги 6 соответственно через O, A, B, C, O1, Д, E, P. Механизм работает следующим образом: кривошип 1, совершая полный оборот, поворачивает кулачок 8 управления величиной хода каретки и кулачок 13 управления осевой линией хода каретки, посредством храпового механизма. Кулачок 8 задает смещение ролику 9 ползуна 10, который, воздействуя через шатун 11 на рычаг 12, повернет его относительно первоначального положения, а последний, в свою очередь, переместит шарнир Д и вместе с ним кулису 5 относительно оси шарнира C кулисного камня 4. При этом изменится соотношение |ДE|/|ДP| длин плеч кулисы 5, от которого будет зависеть величина хода каретки, причем при возрастании этого соотношения величина хода будет увеличиваться и, наоборот, при уменьшении - сокращаться. Шарнир Д выполняет роль подвижной управляемой опоры, а кулиса 5 работает как коромысло. В зависимости от заданной профилем кулачка 13 программы, получает смещение ролик 14 ползуна 15. Последний, через шатун 16, серьгу 17, рычаг 12, переместит шарнир Д. Кулиса 5, при этом, повернется относительно оси шарнира C кулисного камня 4, изменяя положение осевой линии хода каретки. На фиг.2 показаны два положения кулисы 5 в цикле хода каретки: среднее и близкое к крайнему (соответственно точки O, A, B, C, O1, Д, E, P и O, A1, B1, C1, O1, Д, E1 P1). Для кулисы 5, скорость VE точки E и, следовательно, каретки Vвк, пропорциональна скорости VP точки P, совпадающей для кулисного камня 4 и кулисы 5, и скорости VC точки C коромысла 3, с коэффициентом пропорциональности равным отношению |ДE|/|ДP| радиусов перемещений точек E и P относительно подвижной управляемой опоры Д, т.е. заметим, что длина плеча ДP кулисыявляется переменной величиной (DДP на фиг.2), вследствие несовпадения центров O1 и Д качания коромысла 3 и кулисы 5. Скорость VC точки C, принадлежащей одновременно коромыслу 3 и кулисному камню 4, изменяется по синусоидальному закону, что обусловлено спецификой работы кривошипнокоромысловых механизмов. Абсолютное значение скорости VC будет максимальным именно в среднем положении кулисы 5, когда длина плеча ДP также максимальна, а отношение |ДE|/|ДP|, напротив, имеет минимальное значение, т.е. Чем дальше кулиса 5 находится от своего среднего положения, тем меньше скорость VC и плечо ДP, но больше отношение |ДE|/|ДP|. Принимая во внимание формулу (1), указанное свойство предлагаемой конструкции привода даст возможность приблизить скорость движения каретки на участках петлеобразования к постоянной. Применение привода каретки плосковязальной машины позволит приблизить закон изменения скорости движения каретки к оптимальной трапецеидальной форме, благодаря чему возрастает производительность плосковязальной машины и повысится качество вырабатываемого трикотажа.
ДивитисяДодаткова інформація
Автори англійськоюYakovlev Yurii Oleksandrovych, Khomiak Volodymyr Antonovych, Pypa Borys Fedorovych
Автори російськоюЯковлев Юрий Александрович, Хомяк Владимир Антонович, Пипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96
Мітки: привод, плосков`язальної, каретки, машини
Код посилання
<a href="https://ua.patents.su/3-24505-privod-karetki-ploskovyazalno-mashini.html" target="_blank" rel="follow" title="База патентів України">Привод каретки плосков’язальної машини</a>
Привод каретки плосков’язальної машини
Номер патенту: 24506
Опубліковано: 21.07.1998
Автори: Піпа Борис Федорович, Хомяк Володимир Антонович, Яковлев Юрій Олександрович
МПК: D04B 15/96
Мітки: привод, каретки, плосков`язальної, машини
Формула / Реферат:
Привод каретки плосковязальной машины, включающий шарнирно-рычажный механизм, содержащий кривошип, шатун, коромысло, кулису, кулисный камень и ползун каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством шарнирно-рычажного механизма, счетное устройство в...
Привод каретки плосков’язальної машини
Номер патенту: 6448
Опубліковано: 29.12.1994
Автори: Яковлев Юрій Олександрович, Березін Леонід Миколайович, Щербань Володимир Юрійович, Кот Андрій Миколайович, Кокшаров Борис Миколайович, Хомяк Олег Миколайович
МПК: D04B 15/96
Мітки: машини, плосков`язальної, каретки, привод
Формула / Реферат:
(57) Привод каретки плосковязальной машины, содержащий вязальную каретку, установленную с возможностью возвратно-поступательного перемещения по направляющим и связанную со средством ее перемещения, и демпфирующий элемент, отличающийся тем, что вязальная каретка связана со средством перемещения посредством демпфирующего элемента.
Механізм швейної каретки ниткошвейної машини
Номер патенту: 3111
Опубліковано: 26.12.1994
Автори: Душкевич Яків Трохимович, Бойко Анатолій Володимирович
МПК: B42B 2/00
Мітки: каретки, механізм, швейної, машини, ниткошвейної
Формула / Реферат:
Механизм швейной каретки ниткошвейной машины, содержащий каретку с держателями для игл и крючков, смонтированную с возможностью перемещения по направляющим, закрепленным на корпусе машины и связанную шатунами с двухплечими рычагами, установленными на вспомогательных валах, на одних плечах которых установлены ролики, взаимодействующие с одинаковыми правым и левым пазовыми кулачками, жестко закрепленными на главном валу, причем центровой...
Гідрооб’ємний привод самохідної машини
Номер патенту: 18244
Опубліковано: 25.12.1997
Автор: Лютий Ігор Іванович
МПК: E02F 9/22
Мітки: машини, гідрооб'ємний, самохідної, привод
Формула / Реферат:
Гидрообъемный привод самоходной машины, содержащий, приводимый в движение двигателем, гидронасос регулируемой производительности, насос подпитки, выходная линия которого сообщена через обратные клапаны с нагнетательной и сливной гидролиниями, которыми гидронасос сообщен с двумя параллельно подключенными между собой гидромоторами, выходные валы которых соединены между собой и имеют общую ось вращения, причем один из гидромоторов выполнен...
Привод робочого органу сільськогосподарської машини, переважно бурякозбиральної
Номер патенту: 7717
Опубліковано: 26.12.1995
Автори: Барвінко Олександр Самійлович, Кузьмінов Вадим Георгійович, Чернявський Спиридон Васильович, Ривлін Валерій Олександрович
МПК: A01D 25/04
Мітки: привод, робочого, бурякозбиральної, машини, сільськогосподарсько, переважно, органу
Формула / Реферат:
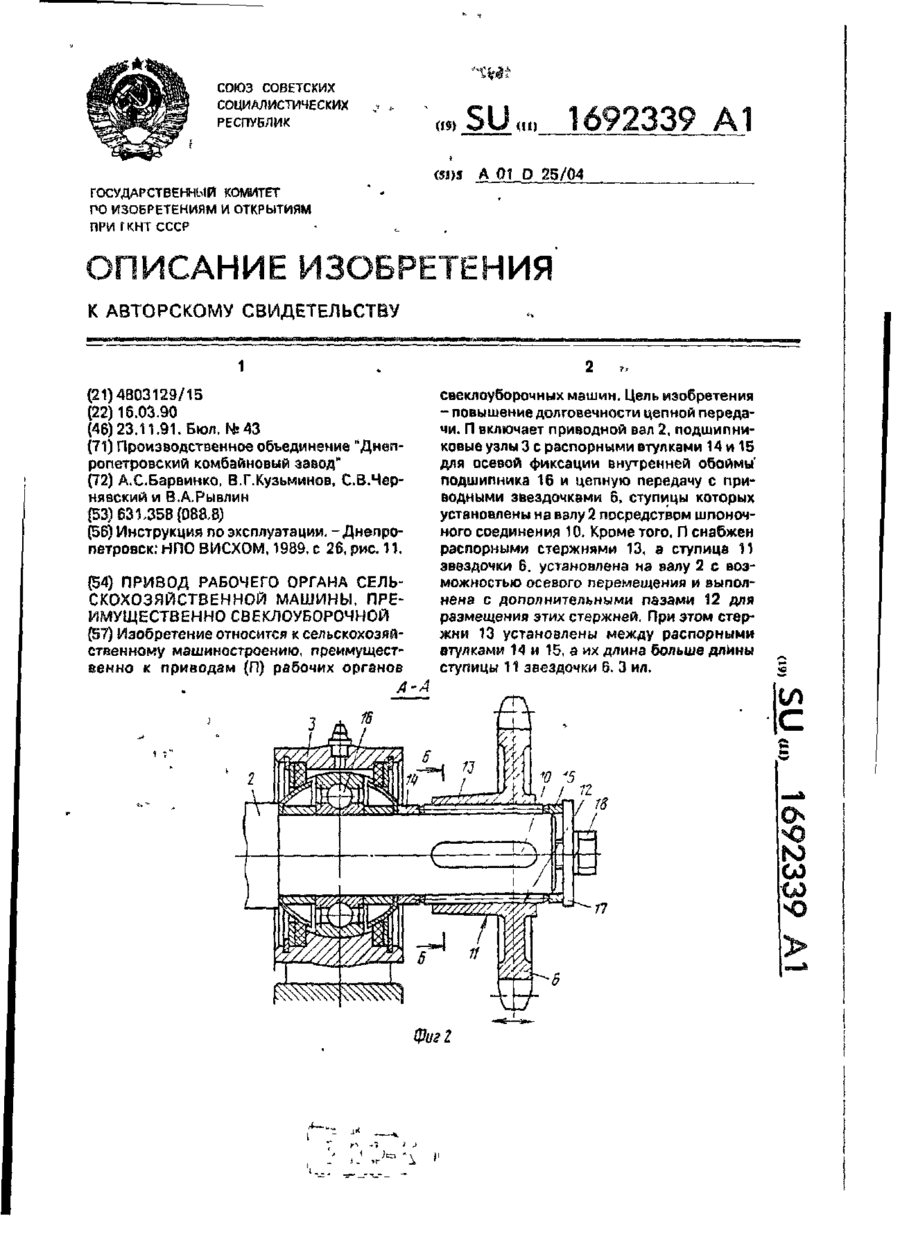
Привод рабочего органа сельскохозяйственной машины, преимущественно свеклоуборочной, содержащий приводные валы с распорными втулками для осевой фиксации внутренней обоймы подшипников и приводные звездочки цепной передачи, ступицы которых установлены на валах, отличающийся тем, что, с целью повышения долговечности цепной передачи, в ступице выполнены параллельно оси вала, диаметрально расположенные пазы, в которые установлены распорные...