Привод каретки плосков’язальної машини
Номер патенту: 24930
Опубліковано: 06.10.1998
Автори: Хомяк Олег Миколайович, Піпа Борис Федорович, Яковлев Юрій Олександрович
Формула / Реферат
Привод каретки плосков'язальної машини, включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового механізму, храпове колесо якого встановлене на одному валу з кулачками і кінематично зв'язане з кривошипом, який відрізняється тим, що додатково містить другий кулісний камінь, який утворює кінематичні пари з кареткою і кулісою, шарнір куліси, що виконує роль рухомої керованої опори, кінематичне замикається на програмний пристрій, а перший кулісний камінь з'єднаний безпосередньо з шатуном.
Текст
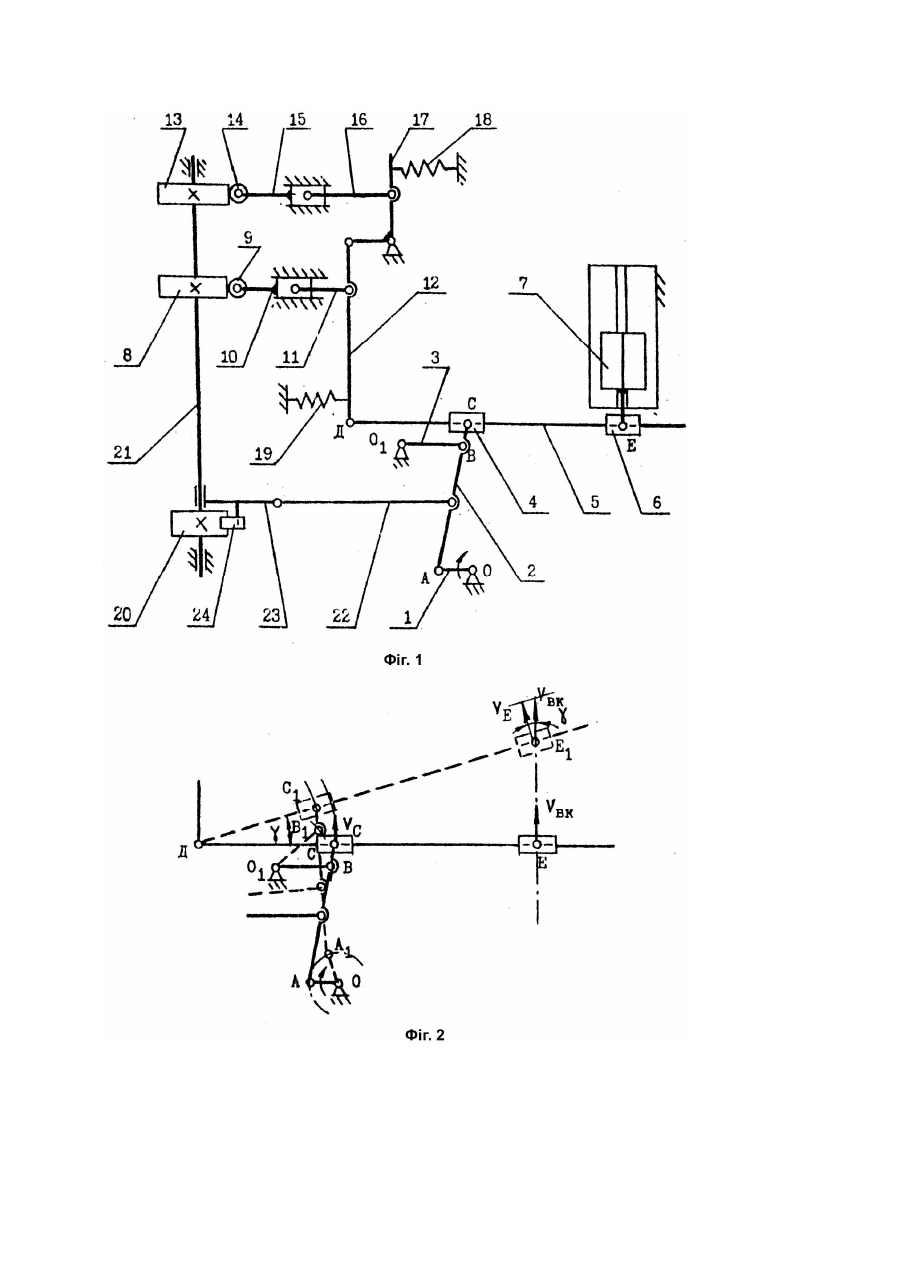
Винахід відноситься до галузі трикотажного машинобудування, зокрема, до приводів каретки плосков'язальних машин. Відомі приводи каретки плосков'язальної машини, що містять каретку, через проміжний повзун зв'язану з ланцюговою передачею, від якої отримує зворотно-поступальний рух (Присажнюк П.А. Наладка і експлуатація плосков'язальних трикотажних машин. - К.: Техніка, 1983. - С.8 - 10, 20 - 24, 29 - 34, 37 - 41). Суттєвою ознакою цих механізмів е можливість керування величиною ходу каретки за допомогою кінцевих перемикачів, в залежності від закладеної програми, що дозволяє уникнути вибігів каретки за межі зони в'язання при виробці суцільнов'язаних виробів складної форми. Таким механізмам властиві обмеженість зміни величини ходу каретки - отримують криволінійний контур з кутами нахилу в межах 20 - 60°, неможливість зміни осьової лінії ходу каретки, необхідність попередньої установки повзунок перемикачів в вихідне положення вручну перед початком в'язання, обмеженість швидкості переміщення каретки. Відомі також приводи каретки плосков'язальної машини (Розвиток і можливості автоматичних рукавичкових машин. Development and Potential of Automatic clove machines // Knit Int. 1979. - Vol.8. - №1032. - P.41. Англ.). що містять кулачок для керування положенням осьової лінії ходу каретки, засіб для керування величиною хода каретки, кінематично зв'язані з кареткою через шарнірно-важільний механізм. Засіб для керування величиною хода каретки являє собою два ведених ексцентрика, зв'язаних зубчастою передачею. Ексцентрики через шатуни кінематично зв'язані з проміжними повзунами. Повзун шарнірноважільного механізму, входячи у зачеплення з одним із проміжних повзунів, приводить в рух каретку. Такий привод дозволяє здійснити процес в'язання певних суцільнов'язаних виробів складної форми з оптимальним ходом каретки, тобто без холостих вибігів каретки за межі зони в'язання, зокрема, при виробці рукавичкових виробів. Крім того, закладений в основу привода шарнірноважільний механізм дозволяє отримати більш високі швидкості переміщення каретки, так яке більш сталим у динамічному відношенні. Обмежує застосування такого механізму те, що каретка може здійснювати зворотнопоступальний рух тільки з одним з двох закладених в ексцентриках розмахів. Тому при виробці виробів мінімально необхідний хід каретці забезпечується лише для конкретного асортименту і розмірів виробів. Відомий також привод плосков'язальної машини (Авт. св. СРСР №1730266, 30.04.92), включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового механізму, причому кулісний камінь кінематично зв'язаний з кулачками, а храпове колесо лічильного пристрою встановлене на одному валу з останніми і кінематично зв'язане з кривошипом. Керування величиною ходу каретки і положенням осьової лінії ходу каретки дозволяє розширити технологічні можливості плосков'язальної машини, а також зменшити холості вибіги каретки до мінімально необхідних значень. Крім того, восьмиланковий шарнірно-важільний механізм, що лежить в основі приводу, забезпечує йому сталість у динамічному відношенні. Однак приводу притаманна синусоїдна форма закону змінювання швидкості руху каретки. Максимальна лінійне швидкість каретки, яка відповідає екстремуму синусоїди (досягається в середині ходу каретки) і визначає максимальні навантаження на перероблювані нитки і динамічні зусилля в петлеутворюючих органах, обмежує таким чином підвищення продуктивності за рахунок збільшення швидкісних режимів. Крім того, непостійність швидкості руху каретки на ділянках робочого ходу негативно відбивається на рівномірності петельної структури вироблюваного трикотажу і, отже, якості виробів. В основу винаходу покладена задача створення такого приводу каретки плосков'язальної машини, в якому новий кінематичний ланцюг ланок дозволив би приблизити закон змінювання швидкості руху каретки до оптимальної - трапецієвидної форми, завдяки чому зросте продуктивність плосков'язальної машини і підвищиться якість вироблюваного трикотажу. Вказана задача вирішена тим, що привод, включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового механізму, храпове колесо якого встановлене на одному валу з кулачками і кінематично зв'язане з кривошипом, згідно винаходу, додатково містить другий кулісний камінь, що утворює кінематичні пари з кареткою і кулісою, шарнір куліси, що виконує роль рухомої керованої опори, кінематично замикається на програмний пристрій, а перший кулісний камінь з'єднаний безпосередньо з шатуном. Таке технічне рішення - введення у шарнірноважільний механізм другого кулісного каменя, що утворює кінематичні пари з кареткою і кулісою, а також кінематичне замикання шарніра куліси, що виконує роль рухомої керованої опори, на програмний пристрій і з'єднання першого кулісного каменя безпосередньо з шатуном, дозволяє в циклі ходу каретки отримувати на кулісі змінні довжини плечей передачі руху від першого кулісного каменя, зв'язаного з шатуном, на другий кулісний камінь, зв'язаний з кареткою, відносно шарніру куліси, що виконує роль рухомої керованої опори, що в свою чергу дасть можливість приблизити закон змінення швидкості руху каретки до трапецієвидної форми та забезпечує збільшення середньої швидкості циклу і пропорціональне збільшення продуктивності, в порівнянні з механізмом, утворюючим синусоїдний закон руху каретки, при рівності максимальних лінійних швидкостей в розглядуваних законах руху каретки. Крім того, приближення швидкості руху каретки на ділянках петлеутворення до сталої позитивно позначається на рівномірності петельної структури вироблюваного трикотажу і, отже, якості виробів. На фіг.1 зображена кінематична схема запропонованого приводу каретки плосков'язальної машини; на фіг.2 - схема змінення положень ланок приводу в циклі руху каретки. Запропонований привод (фіг.1) містить кривошип 1, через шатун 2 зв'язаний з коромислом 3, і далі через камінь 4 куліси 5, кулісний камінь 6 з кареткою 7. Керування величиною ходу каретки здійснює кулачок 8, зв'язаний через ролик 9, повзун 10, шатун 11 з важелем 12 і кулісою 5. Керування положенням осьової лінії ходу каретки здійснює кулачок 13, зв'язаний через ролик 14, повзун 15, шатун 16, сергу 17, важіль 12 з кулісою 5. Пружини 18 і 19 забезпечують силове замикання механізму. Храпове колесо 20, що встановлене разом з кулачками 8 і 13 на валу 21, надає кулачкам переривистий обертальний рух на кожний повний оберт кривошипу 1. Храпове колесо 20 зв'язане з кривошипом 1 через шатун 2, важіль 22, коромисло 23, на якому кріпиться собачка 24. Позначимо шарніри кривошипу 1, шатуна 2, коромисла 3, куліси 5 і кулісного каменю 6 відповідно через О, А, В, С, О1, Д, Е. Механізм працює слідуючим чином: кривошип 1, здійснюючи повний оберт, повертає кулачок 8 керування величиною ходу каретки і кулачок 13 керування осьовою лінією ходу каретки, за допомогою храпового механізму. Кулачок 8 задає зміщення ролику 9 повзуна 10, який, діючи через шатун 11 на важіль 12, поверне його відносно початкового положення, а останній, в свою чергу, перемістить шатун Д і разом з ним кулісу 5 відносно шарніра С каменя 4. При цьому зміниться співвідношення |ДЕ|/|ДС| довжин плечей куліси 5, від якого буде залежати величина ходу каретки, причому при зростанні цього відношення, величина ходу буде збільшуватись і, навпаки, при зменшенні -скорочуватись. Шарнір Д виконує роль рухомої керованої опори, а куліса 5 працює як коромисло. В залежності від заданої профілем кулачка 13 програми, отримує зміщення ролик 14 повзуна 15. Останній, через шатун 16, сергу 17, важіль 12, перемістить шарнір Д. Куліса 5, при цьому, повернеться відносно осі шарніру С кулісного каменю 4, змінюючи положення осьової лінії ходу каретки. На фіг.2 показані два положення куліси 5 в циклі одиночного ходу в'язальної каретки: середнє і близьке до крайнього (відповідно точки О, А, В, С, О1, Д, Е і О1, А1, В1, С1, О1, Д, Е1). Швидкість Vвк каретки, являє залежність від лінійної швидкості VС точки С, кута гойдання куліси 5 відносно середнього положення і довжин плечей ДЕ і ДС, що мають змінну величину внаслідок різної кривизни траєкторії руху шарнірів С і Е кулісних камнів 4 і 6, і точок куліси 5, що збігаються з ними: Швидкість VС точки С, що належить одночасно шатуну 2 і кулісному каменю 4, змінюється за синусоїдним законом, що обумовлено специфікою роботи кривошипно-коромислових механізмів. Абсолютне значення швидкості VС буде максимальним в середньому положенні куліси 5. При цьому кут g=0 і cos g = 1 ® max l, довжина плеча ДЕ куліси буде мінімальною, а плеча ДС, навпаки, максимальною, тобто Чим далі знаходиться куліса 5 від свого середнього положення, тим менше швидкість VС але кут g і довжина плеча ДЕ куліси зростають, а плеча ДС зменшуються. Приймаючи до уваги вираз (1), вказана властивість запропонованої конструкції приводу дасть можливість приблизити швидкість руху каретки на ділянках петлеутворення до постійної. Застосування приводу каретки плосков'язальної машини дозволить приблизити закон змінення швидкості руху каретки до оптимальної трапецієвидної форми, завдяки чому зросте продуктивність плосков'язальної машини і підвищиться якість вироблюваного трикотажу.
ДивитисяДодаткова інформація
Автори англійськоюYakovlev Yurii Oleksandrovych, Khomiak Oleh Mykolaiovych, Pypa Borys Fedorovych
Автори російськоюЯковлев Юрий Александрович, Хомяк Олег Николаевич, Пипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96
Мітки: машини, каретки, привод, плосков`язальної
Код посилання
<a href="https://ua.patents.su/3-24930-privod-karetki-ploskovyazalno-mashini.html" target="_blank" rel="follow" title="База патентів України">Привод каретки плосков’язальної машини</a>
Привод каретки плосков’язальної машини
Номер патенту: 24926
Опубліковано: 06.10.1998
Автори: Хомяк Олег Миколайович, Яковлев Юрій Олександрович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: машини, плосков`язальної, привод, каретки
Формула / Реферат:
Привод каретки плосков'язальної машини, включаючий шарнірно-важільний механізм, що містить кривошип, шатун, коромисло, кулісу, кулісний камінь і повзун каретки, програмний пристрій для керування величиною ходу каретки і положенням осьової лінії ходу каретки, являючий собою два кулачки, що містять по периметрах змінні накладки і кінематично зв'язані з повзуном каретки через шарнірно-важільний механізм, лічильний пристрій у вигляді храпового...
Привод каретки плосков’язальної машини
Номер патенту: 24506
Опубліковано: 21.07.1998
Автори: Хомяк Володимир Антонович, Яковлев Юрій Олександрович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: машини, привод, плосков`язальної, каретки
Формула / Реферат:
Привод каретки плосковязальной машины, включающий шарнирно-рычажный механизм, содержащий кривошип, шатун, коромысло, кулису, кулисный камень и ползун каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством шарнирно-рычажного механизма, счетное устройство в...
Привод каретки плосков’язальної машини
Номер патенту: 24505
Опубліковано: 21.07.1998
Автори: Піпа Борис Федорович, Яковлев Юрій Олександрович, Хомяк Володимир Антонович
МПК: D04B 15/96
Мітки: машини, плосков`язальної, привод, каретки
Формула / Реферат:
Привод каретки плосковязальной машины, включающий восьмизвенный рычажный механизм, состоящий из кривошипа, шатуна, коромысла, кулисы, кулисного камня, тяги и ползуна каретки, программное устройство для управления величиной хода каретки и положением осевой линии хода каретки, представляющее собой два кулачка, содержащие по периметрам сменные накладки и кинематически связанные с ползуном каретки посредством рычажного механизма, счетное...
Привод каретки плосков’язальної машини
Номер патенту: 6448
Опубліковано: 29.12.1994
Автори: Щербань Володимир Юрійович, Хомяк Олег Миколайович, Кот Андрій Миколайович, Кокшаров Борис Миколайович, Березін Леонід Миколайович, Яковлев Юрій Олександрович
МПК: D04B 15/96
Мітки: привод, плосков`язальної, машини, каретки
Формула / Реферат:
(57) Привод каретки плосковязальной машины, содержащий вязальную каретку, установленную с возможностью возвратно-поступательного перемещения по направляющим и связанную со средством ее перемещения, и демпфирующий элемент, отличающийся тем, что вязальная каретка связана со средством перемещения посредством демпфирующего элемента.
Механізм швейної каретки ниткошвейної машини
Номер патенту: 3111
Опубліковано: 26.12.1994
Автори: Душкевич Яків Трохимович, Бойко Анатолій Володимирович
МПК: B42B 2/00
Мітки: каретки, ниткошвейної, швейної, механізм, машини
Формула / Реферат:
Механизм швейной каретки ниткошвейной машины, содержащий каретку с держателями для игл и крючков, смонтированную с возможностью перемещения по направляющим, закрепленным на корпусе машины и связанную шатунами с двухплечими рычагами, установленными на вспомогательных валах, на одних плечах которых установлены ролики, взаимодействующие с одинаковыми правым и левым пазовыми кулачками, жестко закрепленными на главном валу, причем центровой...
Попередній патент: Безалкогольний напій “мустанг”
Наступний патент: Установка подання конденсату турбін виробництва аміаку у деаератори
Випадковий патент: Спосіб декомпозиції алюмінатних розчинів циклу байєра