Компенсаційний акселерометр з оптичним датчиком кута


Формула / Реферат
1. Компенсаційний акселерометр з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, пружно прикріпленим до корпусу і виконаним як екрануючий елемент з щілиною, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елементу між ними, датчиком моменту, що містить у собі магнітну систему і рухому котушку, встановлену на маятнику, електричною системою, і кожух, герметично зв'язаний з корпусом, який відрізняється тим, що маятник складається з інерційної маси, яка утворена рухомою пластиною, укріпленими на ній котушкою датчика моменту, екрануючим елементом, виконаним у вигляді шторки з щілиною, направленою уздовж осі маятника, вантажем, жорстко зв'язаним зі шторкою, нерухомої основи і пружного підвісу рухомої пластини до основи, жорстко прикріпленої до верхньої частини корпусу, а магнітна система встановлена на циліндричному виступі верхньої частини корпусу і складається із зовнішнього і внутрішнього магнітопроводів і кільцеподібного постійного магніту, що має діаметральну намагніченість уздовж осі маятника, вісь підвісу якого лежить в нейтральній площині магніту, при цьому джерело світла і приймач світла нерухомо встановлені на рухомій вилці, а рухома котушка розташована в зазорі, утвореному внутрішньою поверхнею зовнішнього магнітопроводу і зовнішньою поверхнею постійного магніту.
2. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що в нижній частині його корпусу виконаний нарізний отвір для установки в ньому упора з нарізкою, контактуючого з нижньою поверхнею рухомої вилки, на верхній поверхні якої з можливістю вибору люфтів встановлені, наприклад, пружини, що упираються в козирок, жорстко закріплений на корпусі.
3. Компенсаційний акселерометр з оптичним датчиком кута за п. 1 і п. 2, який відрізняється тим, що в корпусі виконані напрямні з можливістю поступального переміщення по них вилки в двох напрямах уздовж вимірювальної осі акселерометра для механічної настройки нульового сигналу оптичного датчика кута і подальшої фіксації вилки до корпусу з використанням, наприклад, гвинтів.
4. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що в його корпусі для регулювання зазору між шторкою і приймачем світла виконаний отвір з нарізкою для установки в ньому фіксатора з ексцентриком в його верхній частині і з розташуванням ексцентрика в прорізі нерухомої основи маятника.
5. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що в його електричну систему для зменшення його температурних погрішностей шляхом стабілізації коефіцієнта перетворення датчика кута введене додаткове коло зворотного зв'язку, що складається з суматора, два інвертуючих входи якого зв'язані з виходами відповідних попередніх підсилювачів сигналів з диференціального приймача світла, при цьому неінвертуючий вхід суматора зв'язаний з джерелом опорної напруги, а його вихід - з входом регулятора струму джерела світла.
Текст
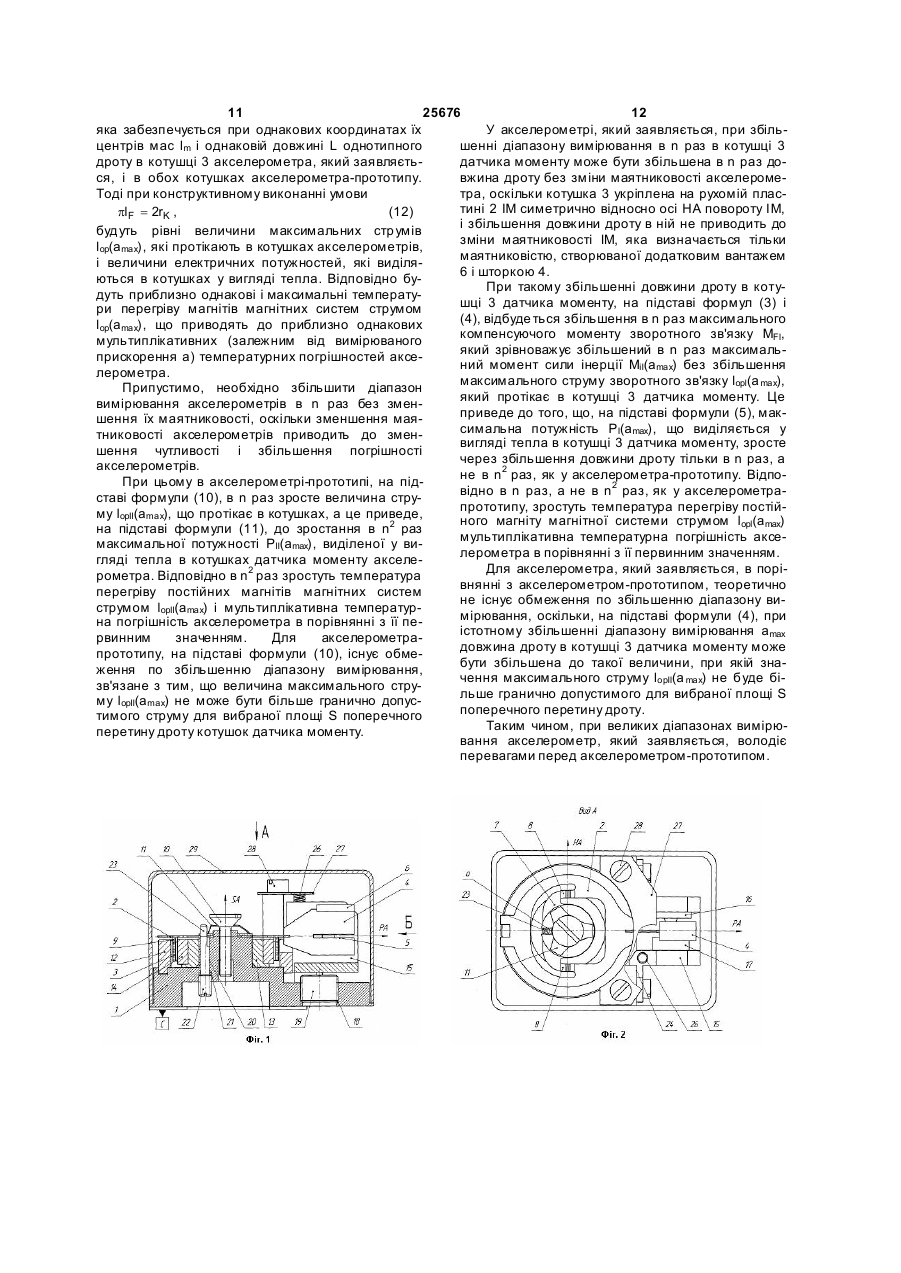
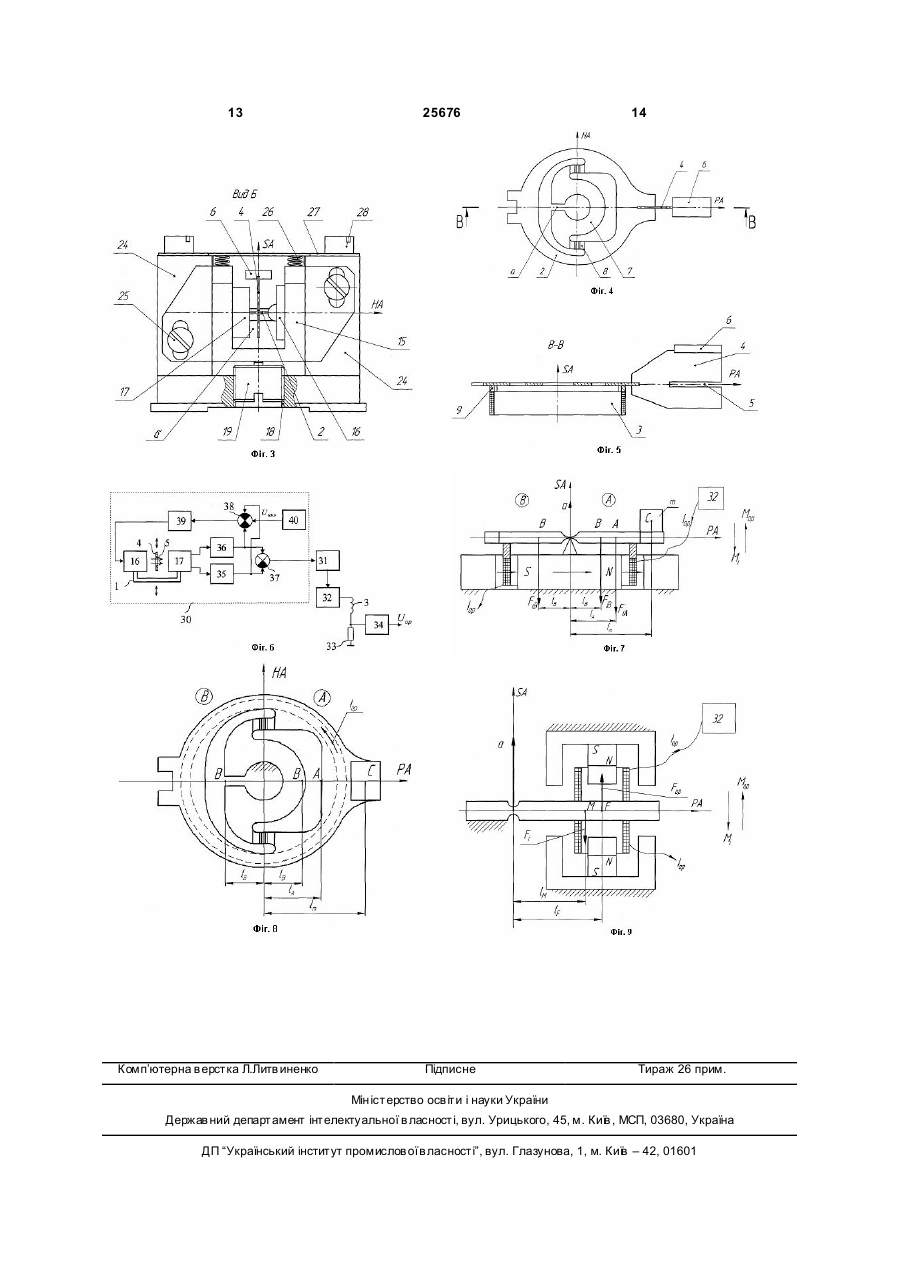
1. Компенсаційний акселерометр з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, пружно прикріпленим до корпусу і виконаним як екрануючий елемент з щілиною, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елементу між ними, датчиком моменту, що містить у собі магнітну систему і р ухому котушку, встановлену на маятнику, електричною системою, і кожух, герметично зв'язаний з корпусом, який відрізняється тим, що маятник складається з інерційної маси, яка утворена рухомою пластиною, укріпленими на ній котушкою датчика моменту, екрануючим елементом, виконаним у вигляді шторки з щілиною, направленою уздовж осі маятника, вантажем, жорстко зв'язаним зі шторкою, нерухомої основи і пружного підвісу рухомої пластини до основи, жорстко прикріпленої до верхньої частини корпусу, а магнітна система встановлена на циліндричному виступі верхньої частини корпусу і складається із зовнішнього і внутрішнього магнітопроводів і кільцеподібного постійного магніту, що має діаметральну намагніченість уздовж осі маятника, вісь підвісу якого лежить в нейтральній площині магніту, при цьому джерело світла і приймач світла нерухомо встановлені на рухомій вилці, а рухома котушка розташована в зазорі, утвореному внутрішньою U 2 UA 1 3 25676 4 Акселерометр включає маятникову інерційну повертає маятник в нейтральне положення. Велимасу (маятник), поміщену в герметичний корпус із чина і напрям струму зворотного зв'язку дозволяє створеним в ньому вакуумом або заповнений інервимірювати величину і напрям прискорення. тним газом (наприклад, гелієм), і виконану у виНедоліками акселерометра, що розглядаєтьгляді рухомого стержня, нижня частина якого зв'яся, є: зана за допомогою пружного підвісу з пластиною, 1) конструкція акселерометра, в якій викорисприкріпленою гвинтами до базової площини однієї товується стержень великого діаметру, не дозвоз рамок. Стержень може повертатися на пружному ляє розташувати джерело світла і приймачі світла підвісі навколо пластини у напрямі вимірювальної на близькій відстані один від одного, що зменшує осі акселерометра. До стержня маятника прикріпчутливість оптичного датчика кута акселерометра і лені дві рухомі котушки циліндричної форми. сприяє збільшенню шуму у ви хідному сигналі датМагнітні аксіальні системи акселерометра чика кута; включають в себе магнітопроводи, роль яких ви2) конструкція акселерометра така, що нейтконують перша і друга рамки, виготовлені з магніральному положенню маятника звичайно не відпотом'якого матеріалу, а також постійні магніти і повідає нульове значення вихідного сигналу датчика люсні наконечники, при цьому рухомі котушки кута; знаходяться у відповідних зазорах, утворених по3) конструкція датчика кута забезпечує низьку верхнями магнітопроводів і полюсних наконечниточність механічної настройки його нульового сигків. Перелічені елементи разом з рухомими котушналу. ками формують датчик моменту акселерометра. Другим прототипом акселерометра, найближОбидві рамки жорстко з'єднуються між собою, чим за технічною суттю до корисної моделі, що причому в кожній з них розміщені обмежувачі для заявляється, є пристрій, приведений в [патенті обмеження діапазону переміщення маятника. Цей США №4,649,748 від 17 березня 1987р.]. діапазон можна регулювати шля хом переміщення Конструкція і робота даного акселерометра обмежувачів в нарізних отворах, виконаних в рамблизькі до конструкції і роботи першого прототипу ках. акселерометра. Конструкція другого прототипу У корпусі з метою вимірювання переміщення має наступні відмінності: маятника встановлений датчик кута, що склада1) перша рамка - магнітопровід магнітної сисється з одного джерела світла і двох приймачів теми акселерометра є базовим установочним світла. Маятник розташований між рамками, на елементом акселерометра, що дозволяє спростиодній з яких встановлене джерело світла, а на ти конструкцію і зменшити масу акселерометра; іншій - приймачі світла. Таким чином, маятник є 2) вільний кінець стержня маятника, розташоекрануючим елементом при проходженні світловований між джерелом світла і двома приймачами го потоку від джерела світла до приймачів світла. світла, виконаний у вигляді тонкої пластини, що За відсутності вимірюваного прискорення уздозволяє наблизити один до одного джерело світдовж вимірювальної осі маятник знаходиться в ла і приймачі світла. Це підвищує чутливість оптинейтральному положенні, при якому частина світчного датчика кута і зменшує шуми в його ви хідлового потоку, що випромінюється джерелом світному сигналі. У одному з варіантів акселерометра ла, екранується поверхнею нерухомого маятника і тонка пластина виконана у вигляді стержня, що не потрапляє до приймачів світла, а частина - розперекриває частину світлового потоку від джерела поділяється рівномірно між приймачами світла, світла до приймачів світла. В іншому варіанті акзабезпечуючи рівні величини потоків, що потрапселерометра пластина виконана у вигляді тонкого ляють на обидва приймачі світла. При цьому світстержня з розрізом уздовж осі стержня маятника, лоприймальні поверхні освітлюються світловими який пропускає частину світлового потоку; потоками не повністю, але однаково, що виключає 3) елементи конструкції, в яких встановлені можливість виникнення напруги в електричній сисджерело і приймачі світла, притиснуті до нерухотемі акселерометра. мих рамок за допомогою плоскої пружини, що піддії прискорення об'єкту уздовж вимірювальної вищує точність механічної настройки нульового осі виникає момент сили інерції, який відхилює сигналу датчика кута. маятник від його нейтрального положення. В реДо недоліків акселерометра, найближчого по зультаті цього відбувається перерозподіл світлотехнічному рішенню до корисної моделі, що заяввого потоку, що потрапляє від джерела світла на ляється, і вибраного як прототип, відносяться: приймачі світла: на один з приймачів потрапляє 1) наявність в акселерометрі датчика моменту більший світловий потік, ніж на другий приймач. з двома аксіальними магнітними системами, що Відмінність величин світлових потоків, що потраппри необхідності збільшення діапазону вимірюляють на світлоприймальні поверхні приймачів вання акселерометра вимагає збільшення значенсвітла, приводить до виникнення напруги в електня струму, що протікає в котушках датчика моменричній системі акселерометра. При цьому виникає ту при максимальному вимірюваному прискоренні, електричний сигнал, пропорційний зміщенню маяа це приводить до збільшення температурної потника, а, отже, прискоренню об'єкту. Далі цей сиггрішності коефіцієнта перетворення акселерометнал перетворюється в струм зворотного зв'язку, ра унаслідок збільшення електричної потужності, який протікає через котушки датчика моменту і яка розсіюється в котушках і нагріває постійні магвзаємодіє з полями постійних магнітів, внаслідок ніти магнітної системи, при цьому акселерометр з чого виникає сила зворотного зв'язку. Момент цієї двома магнітними системами має складну конссили відносно осі пружного підвісу врівноважує трукцію і технологію збирання унаслідок необхідмомент сили інерції вимірюваного прискорення і 5 25676 6 ності точного одночасного розташування обох кошторкою і приймачем світла виконаний отвір з тушок в зазорах магнітних систем; нарізкою для установки в ньому фіксатора з ексАналогічними недоліками володіє і перший центриком в його верхній частині і з розташуванпрототип акселерометра. ням ексцентрика в прорізі нерухомої основи маят2) конструкція датчика кута забезпечує невиника, а в електричну систему акселерометра для соку точність механічної настройки нульового сигзменшення його температурних погрішностей налу датчика кута; шляхом стабілізації коефіцієнта перетворення 3) малий діапазон переміщень джерела світла датчика кута введене додаткове коло зворотного і приймачів світла відносно нерухомого корпусу зв'язку, що складається з суматора, два інвертуюакселерометра не дозволяє виконати механічну чих входи якого зв'язані з виходами відповідних настройку датчика кута в ти х випадках, коли має попередніх підсилювачів сигналів з диференціальмісце великий кут між віссю стержня маятника в ного приймача світла, при цьому неінвертуючий нейтральному положенні і базовою установочною вхід суматора зв'язаний з джерелом опорної наплощиною акселерометра. пруги, а його ви хід - з входом регулятора струму У основу корисної моделі покладена задача джерела світла. удосконалення компенсаційного акселерометра з Пропонована конструкція акселерометра дооптичним датчиком кута шляхом спрощення його зволяє поліпшити його експлуатаційні характерисконструкції і технології її збирання, підвищення тики і підвищити ефективність його роботи при точності настройки нульового сигналу датчика кута установці на об'єкті - наприклад, на транспортному і зменшення температурної погрішності коефіцієнзасобі. та перетворення акселерометра. Конструкція акселерометра, який заявляється, Поставлена задача вирішується так, що в компояснюється такими фігурами: пенсаційному акселерометрі з оптичним датчиком на Фіг.1 показаний поперечний перетин аксекута, що містить корпус з базовою установочною лерометра, проведений уздовж осі чутливості SA і поверхнею, з розташованими в ньому чутливим осі маятника РА, тобто показаний його головний елементом у вигляді маятника, пружно прикріплевид; ним до корпусу і виконаним як екрануючий елевид А на Фіг.1 (без елементу поз.29) показаний мент з щілиною, датчиком кута, який складається з на Фіг.2; джерела світла і диференціального приймача свіна Фіг.3 представлений вид Б на Фіг.1 (без тла, розташованих один проти одного з розміщенелементу поз.29); ням екрануючого елементу між ними, датчиком на Фіг.4 показана конструкція чутливо го елемоменту, що містить у собі магнітну систему і рументу; хому котушку, встановлену на маятнику, електрина Фіг.5 представлений розріз В-В на Фіг.4; чною системою, і кожух, герметично зв'язаний з на Фіг.6 приведена функціональна електрична корпусом, новим є те, що маятник складається з схема акселерометра; інерційної маси, яка утворена рухомою пластиною, на Фіг.7 і Фіг.8 представлені фігури, що поясукріпленими на ній котушкою датчика моменту, нюють принцип дії акселерометра, який заявляекрануючим елементом, виконаним у вигляді штоється; рки з щілиною, направленою уздовж осі маятника, на Фіг.9 представлена фігура, що пояснює вантажем, жорстко зв'язаним зі шторкою, неруховідмінність принципу дії акселерометра, який замої основи і пружного підвісу рухомої пластини до являється, від прототипу. основи, жорстко прикріпленої до верхньої частини Акселерометр (Фіг.1-5) складається з корпусу корпусу, а магнітна система встановлена на цилі1, у вер хній частині якого розміщений чутливий ндричному виступі верхньої частини корпусу і елемент, що складається з інерційної маси (далі складається із зовнішнього і внутрішнього магнітопо тексту IМ), утвореної рухомою пластиною 2, проводів і кільцеподібного постійного магніту, що укріпленими на ній котушкою 3, шторкою 4 з щілимає діаметральну намагніченість уздовж осі маятною 5, виконаної уздовж осі РА маятника, і вантаника, вісь підвісу якого лежить в нейтральній пложем 6, жорстко зв'язаним зі шторкою 4, нерухомої щині магніту, при цьому джерело світла і приймач основи 7 і пружного підвісу 8 пластини 2 до основи світла нерухомо встановлені на рухомій вилці, а 7. Котушка 3 з пластиною 2 з'єднана за допомогою рухома котушка розташована в зазорі, утвореному стійок 9. Основа 7 жорстко закріплена на верхній внутрішньою поверхнею зовнішнього магнітопрочастині корпусу 1, наприклад, за допомогою гвинта воду і зовнішньою поверхнею постійного магніту, в 10 і пружинної шайби 11. нижній частині корпусу виконаний нарізний отвір На корпусі 1 розміщені диференціальний опдля установки в ньому упору з нарізкою, контактутичний датчик кута і датчик моменту акселерометючого з нижньою поверхнею рухомій вилки, на ра. Датчик моменту складається з магнітної сисверхній поверхні якої з можливістю вибору люфтів теми і котушки 3. Магнітна система акселерометра встановлені, наприклад, пружини, що упираються встановлена на верхньому циліндричному виступі в козирок, жорстко закріплений на корпусі, причокорпусу 1 і складається із зовнішнього 12 і внутріму в корпусі виконані направляючі з можливістю шнього 13 магнітопроводів і кільцеподібного попоступального переміщення по них вилки в двох стійного магніту 14, що має діаметральну намагнінапрямах уздовж вимірювальної осі акселерометченість уздовж осі РА чутливого елементу. При ра для механічної настройки нульового сигналу цьому вісь підвісу чутливого елементу НА лежить оптичного датчика кута і подальшої фіксації вилки в нейтральній площині магніту 14. Котушка 3 роздо корпусу з використанням, наприклад, гвинтів, ташована в зазорі, утвореному внутрішньою повекрім того, в корпусі для регулювання зазору між 7 25676 8 рхнею зовнішнього магнітопровода 12 і зовнішкута, а, відповідно, і до відсутності ви хідного сигньою поверхнею постійного магніту 14. налу акселерометра. Оптичний датчик кута складається з вилки 15, При дії вимірюваного прискорення а уздовж на якій нерухомо встановлені напроти один одного осі SA IМ маятникового чутливого елементу під джерело світлового потоку 16 - світлодіод і придією моменту сили інерції Mi = m å la ( m å - маса ймач світлового потоку 17 - двоелементний фотоIМ, l - відстань від осі підвісу НА до центру мас IМ) діод, а також шторки 4 з щілиною 5, встановленої відхиляється на пружному підвісі 8 відносно корпуна рухомій пластині 2 чутливого елементу. су 1 акселерометра. При позитивному прискоренні У нижній частині корпусу 1 є нарізний отвір 18 IМ переміщується до установочної поверхні С, а для установки в ньому упору 19 з нарізкою, а тапри негативному - від поверхні С. Відповідно з IМ кож в корпусі 1 виконано отвір 20 з нарізкою 21 в переміщується і шторка 4 з щілиною 5 відносно його нижній частині для розміщення в ньому фіксвітлодіода 16 і двоелементного фотодіода 17. сатора 22 з ексцентриком 23. Переміщення шторки 4 призводить до того, що Вилка 15 встановлена в корпусі 1 з можливісосвітлена світлодіодом 16 через щілину 5 площа тю переміщення вверх-вниз по направляючих 24 одного світлочутли вого елементу збільшується, а корпусу 1 і подальшої фіксації до корпусу 1 гвиніншого - зменшується, відповідно змінюються і тами 25. напруги на виходах попередніх підсилювачів 35 і З нижньою поверхнею вилки 15 контактує упор 36, які поступають на входи суматора 37. На вихо19, а з верхньою поверхнею - дві пружини 26, що ді суматора 37 формується вихідна напруга датчиупираються в козирок 27, жорстко закріплений на ка кута у вигляді напруги постійного струму, великорпусі 1 гвинтами 28. чина якого пропорційна переміщенню IМ, а знак При переміщенні упору 19 по нарізці отвору 18 відповідає напряму цього переміщення. Далі ця здійснюється переміщення вилки 15 уздовж осі SA напруга проходить через ланку корекції 31 і підсипо направляючих 24 корпусу 1. Стиснути пружини лювач потужності 32, вихідна напруга якого у ви26 вибирають люфти при переміщенні вилки 15. гляді сигналу негативного зворотного зв'язку подаДо корпусу 1 кріпиться кожух 29, необхідний ється на котушку 3 да тчика моменту, встановлену для захисту акселерометра від зовнішніх дій. на рухомій пластині IМ. Корпус 1 має базову установочну поверхню С Протікаючи по котушці 3, стр ум зворотного перпендикулярну вимірювальній осі SA. зв'язку Іop взаємодіє з полем постійного магніту 14 Функціональна електрична схема акселеромедатчика моменту і створює навколо осі підвісу НА тра показана на Фіг.6. Вона складається з оптичмомент зворотного зв'язку МF, який врівноважує ного датчика кута 30, ланки корекції 31, підсилюмомент сили інерції Мі, вимірюваного прискорення вача потужності 32, котушки датчика моменту 3, і повертає IМ в нейтральне положення. Протікаюрезистора 33 і фільтру 34. Напруга Uop - вихідна чи по резистору 33, струм зворотного зв'язку ствонапруга акселерометра. До складу датчика кута 30 рює напругу Uop=IopR (R - опір резистора 33), яка входять світлодіод 16, двоелементний фотодіод після проходження фільтру 34 є вихідним сигна17, шторка 4 з щілиною 5, попередні підсилювачі лом акселерометра. 35 і 36, суматори 37 і 38, регулятор струм у 39 і Ексцентрик 23 фіксатора 22 знаходиться в джерело 40 опорної напруги UREF. прорізі а основи 7 і призначений для регулювання Акселерометр працює таким чином. зазору б між шторкою 4 і двоелементним фотодіоЗа відсутності вимірюваного прискорення об'дом 17 (Фіг.2, Фіг.3). Від величини цього зазору єкту, на якому встановлений акселерометр, назалежить величина площі світлочутливи х елеменправленого уздовж осі SA, IМ маятникового чутлитів фотодіода 17, освітленої світлодіодом 16, яка вого елементу знаходиться в нейтральному при номінальній величині цього зазору в нейтраположенні. Відповідно в нейтральному положенні льному положенні IМ повинна бути рівна половині відносно нерухомих світлодіода 16 і двоелементплощі світлочутливого елементу. Поворот фіксаного фотодіода 17 знаходиться шторка 4 з щілитора 22, за допомогою, наприклад, викрутки, приною 5. водить до повороту осі РА відносно вимірювальної У нейтральному положенні при виконаній меосі SA акселерометра. При цьому відбувається ханічній настройці нульового сигналу датчика кута змінення зазору б між шторкою 4 і двоелементним освітлені світловим потоком світлодіода 16 площі фотодіодом 17. Регулювання зазору б здійснюєтькожного з двох світлочутливи х елементів двоелеся до тих пір, поки його величина не прийме номіментного фотодіода 17 однакові і рівні половині нального значення. площі кожного світлочутливого елементу. Ме ханічна настройка нульового сигналу датКожен освітлений світлочутливий елемент чика кута акселерометра здійснюється перемідвоелементного фотодіода 17 генерує електричщенням уздовж осі SA вилки 15 по направляючих ний фотострум, величина якого пропорційна вели24 корпусу 1. Для механічної настройки нульового чиніосвітленої площі елементу і яскравості джесигналу датчика кута акселерометр встановлюєтьрела світла - світлодіода 16. У нейтральному ся так, щоб IМ його чутливого елементу знаходиположенні IМ величини цих фотострумів однакові, лася в нейтральному положенні. Рух вилки 15 відповідно однакові і величини напруг на виході здійснюється переміщенням контактуючого з нею попередніх підсилювачів 35 і 36, пропорційні фоупору 19 по нарізки 18 в корпусі 1. Разом з вилкою тострумам. У суматорі 37 ці напруги віднімаються, 15 переміщуються встановлені на вилці світлодіод що приводить до рівності нулю вихідної напруги 16 і двоелементний фотодіод 17 відносно щілини 5 цього суматора, що є ви хідною напругою датчика шторки 4, що знаходиться в нейтральному положенні IМ акселерометра. При цьому переміщенні 9 25676 10 змінюються в протилежних напрямах фо тоструми вантажу 6 з шторкою 4; В – величина магнітної на виході двоелементного фотодіода 17. Відповідіндукції в робочому зазорі магнітної системи датно змінюється по величині і знаку напруга на вихочика моменту; rk - радіус котушки 3; L - довжина ді суматора 37, що є ви хідною напругою датчика дроту котушки 3. кута. Величина добутку mlm називається маятникоПоложення вилки 15 відносно направляючих вістю IМ акселерометра, який заявляється. 24 корпусу 1, при якому напруга на виході суматоПри протіканні по котушці 3 стр уму зворотного ра 37 рівна нулю, вважається положенням, при зв'язку ІopI в ній виділяється у вигляді тепла електякому виконана механічна настройка нульового рична потужність PI, яка. визначається виразом: сигналу датчика кута. У цьому положенні вилка 15 L (5) PI = I2 I R K = I2 I r , фіксується до направляючих 24 корпусу 1 гвинтаop op S ми 25. де RK - електричний опір котушки 3; r , L, S При роботі акселерометра його температура відповідно питомий опір, довжина і площа попеможе змінюватися в широких межах, що може речного перетину дроту котушки 3. привести до зміни коефіцієнтів перетворення його Для акселерометрів-прототипів величини інескладових частин (Фіг.6). Для стабілізації коефіцієрційної маси m å , моменту Мi сили інерції Fi, монта перетворення датчика кута при зміні температури в нього введене додаткове коло зворотного менту МF сили зворотного зв'язку Fop і струм у звозв'язку, що складається з суматора 38, регулятора ротного зв'язку Іop далі по тексту позначені струму сві тлодіода 39 і джерела опорної напруги індексом "II" і пов'язані з конструктивними параме40. За допомогою суматора 38 сума напруг з вихотрами акселерометра виразами: дів попередніх підсилювачів 35 і 36 порівнюється з må II= m1II + m2 II » m2 II , (6) напругою UREF джерела 40. m 2II = gLS, (7) Коли коефіцієнт передачі датчика кута рівний номінальному значенню, напруга на виході сумаMiII = m å IIl m a » m 2II l ma, (8) тора 38 рівна нулю, і регулятор 39 підтримує велиMF II = BLl FI op II , , (9) чину стр уму сві тлодіода 16 незмінної. Наприклад, при збільшенні коефіцієнта передачі датчика кута m åIIlm gSlm 30 напруги на виходах попередніх підсилювачів 35 (10) Iop II = a» a, 2BLlF BlF і 36 збільшуються, а напруга на виході суматора 38 стає негативною, що приводить до зменшення де: m 1II, - маса стержня IМ; m 1II - маса обох коструму світлодіода 16 і до зменшення освітленості тушок, укріплених на стержні IМ (у подібній консповерхні світлочутливи х елементів фотодіода 17. трукції чутливого елементу з метою збільшення В результаті коефіцієнт передачі датчика кута 30 діапазону вимірювання прагнуть забезпечити масу повертається до номінального значення. стержня IМ m 1II істотно менше за масу котушок Таким чином, здійснюється стабілізація коефіm 2II, тому у виразі (6) прийнято, що маса всієї IМ в цієнта передачі датчика кута, що зменшує темпеосновному визначається масою її котушок); g , Z, S ратурну погрішність акселерометра. - відповідно густина, загальна довжина і площа Відмінності в роботі акселерометра, який запоперечного перетину дроту обох котушок; lm являється, від прототипів пояснює Фіг.9. координата центру мас IМ; lF - координата точки Для акселерометра, який заявляється, велиприкладення сили зворотного зв'язку, створюваної чини інерційної маси m å , моменту Мі, сили інерції датчиком моменту (співпадає з віссю симетрії котушок); В - величина магнітної індукції в робочому Fi, моменту зворотного зв'язку МF і струм у зворотзазорі магнітних систем датчика моменту. ного зв'язку lop далі по тексту позначені індексом "І" і пов'язані з конструктивними параметрами аксеВеличина добутку m å II l m » m 2II l m називається лерометра виразами (Фіг.7, Фіг.8): маятниковістю акселерометра-прототипу. må = mA + mB = 2mB + m, (1) При протіканні по котушках да тчика моменту струму зворотного зв'язку Іop в них, також як і в Mil = FiAl A - FiBlB = акселерометрі, який заявляється, виділяється у = ( FiBlB - F lm ) - FiBlB = (2) im вигляді тепла електрична потужність РII, яка ви= ( mBlB + ml m - mBlB )a = ml ma, значається виразом: 2 L (3) MFI = BrK LI op I , (11) PII = I op IIR K = I 2 op II r , p S p mlm де RK - загальний електричний опір з'єднаних Iop I = a, (4) послідовно котушок датчика моменту; r , L, S 2BrK L відповідно питомий опір, довжина і площа попеде: m B, lB - маса і координата центру мас лівої речного перетину дроту котушок. (щодо осі НА) частини "В" IМ чутливого елементу На підставі виразів (1)-(11) порівняємо між со(половина пластини 2 і половина котушки 3); m a, lA бою роботу акселерометра, який заявляється, і - маса і координати центру мас правої частини "А" прототипу, а також покажемо переваги акселероIМ, маса якої складається з маси m B (друга полометра, який заявляється. При цьому вважатимемо, вина пластини 2 і друга половина котушки 3) і мащо акселерометри сконструйовані так, що мають си m додаткового вантажу 6 з шторкою 4; FiB, FiA однаковий діапазон вимірювання а max, однакову сили інерції вимірюваного прискорення частини маятниковість "В" і частини "А" IМ; Fim - сила інерції вантажу 6 і шторки 4; lm - координата центру мас додаткового mlm= gLS , 11 25676 12 яка забезпечується при однакових координатах їх У акселерометрі, який заявляється, при збільцентрів мас lm і однаковій довжині L однотипного шенні діапазону вимірювання в n раз в котушці 3 дроту в котушці 3 акселерометра, який заявляєтьдатчика моменту може бути збільшена в n раз дося, і в обох котушках акселерометра-прототипу. вжина дроту без зміни маятниковості акселеромеТоді при конструктивному виконанні умови тра, оскільки котушка 3 укріплена на рухомій пластині 2 IМ симетрично відносно осі НА повороту IМ, plF = 2rK , (12) і збільшення довжини дроту в ній не приводить до будуть рівні величини максимальних стр умів зміни маятниковості IМ, яка визначається тільки lop(amах), які протікають в котушках акселерометрів, маятниковістю, створюваної додатковим вантажем і величини електричних потужностей, які виділя6 і шторкою 4. ються в котушках у вигляді тепла. Відповідно буПри такому збільшенні довжини дроту в котудуть приблизно однакові і максимальні температушці 3 датчика моменту, на підставі формул (3) і ри перегріву магнітів магнітних систем струмом (4), відбуде ться збільшення в n раз максимального lop(amах), що приводять до приблизно однакових компенсуючого моменту зворотного зв'язку MFI, мультиплікативних (залежним від вимірюваного який зрівноважує збільшений в n раз максимальприскорення а) температурних погрішностей аксений момент сили інерції МiI(аmax) без збільшення лерометра. максимального струму зворотного зв'язку lopl(a mах), Припустимо, необхідно збільшити діапазон який протікає в котушці 3 датчика моменту. Це вимірювання акселерометрів в n раз без зменприведе до того, що, на підставі формули (5), макшення їх маятниковості, оскільки зменшення маясимальна потужність PI(amах), що виділяється у тниковості акселерометрів приводить до зменвигляді тепла в котушці 3 датчика моменту, зросте шення чутливості і збільшення погрішності через збільшення довжини дроту тільки в n раз, а акселерометрів. не в n2 раз, як у акселерометра-прототипу. ВідпоПри цьому в акселерометрі-прототипі, на підвідно в n раз, а не в n 2 раз, як у акселерометраставі формули (10), в n раз зросте величина струпрототипу, зростуть температура перегріву постійму lopII(amах), що протікає в котушках, а це приведе, ного магніту магнітної системи струмом lopl(amах) 2 на підставі формули (11), до зростання в n раз мультиплікативна температурна погрішність аксемаксимальної потужності PII(amах), виділеної у вилерометра в порівнянні з її первинним значенням. гляді тепла в котушках датчика моменту акселе2 Для акселерометра, який заявляється, в порірометра. Відповідно в n раз зростуть температура внянні з акселерометром-прототипом, теоретично перегріву постійних магнітів магнітних систем не існує обмеження по збільшенню діапазону виструмом lopII(amах) і мультиплікативна температурмірювання, оскільки, на підставі формули (4), при на погрішність акселерометра в порівнянні з її пеістотному збільшенні діапазону вимірювання а max рвинним значенням. Для акселерометрадовжина дроту в котушці 3 датчика моменту може прототипу, на підставі формули (10), існує обмебути збільшена до такої величини, при якій знаження по збільшенню діапазону вимірювання, чення максимального струму lopII(a mах) не буде бізв'язане з тим, що величина максимального струльше гранично допустимого для вибраної площі S му lopII(amах) не може бути більше гранично допуспоперечного перетинудроту. тимого струму для вибраної площі S поперечного Таким чином, при великих діапазонах вимірюперетину дроту котушок датчика моменту. вання акселерометр, який заявляється, володіє перевагами перед акселерометром-прототипом. 13 Комп’ютерна в ерстка Л.Литв иненко 25676 Підписне 14 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCompensated accelerometer with an optical angular position transducer
Назва патенту російськоюКомпенсационный акселерометр с оптическим датчиком углового положения
МПК / Мітки
МПК: G01P 15/13
Мітки: датчиком, кута, акселерометр, компенсаційний, оптичним
Код посилання
<a href="https://ua.patents.su/7-25676-kompensacijjnijj-akselerometr-z-optichnim-datchikom-kuta.html" target="_blank" rel="follow" title="База патентів України">Компенсаційний акселерометр з оптичним датчиком кута</a>
Компенсаційний акселерометр
Номер патенту: 21726
Опубліковано: 15.03.2007
Автори: Скрипковський Геннадій Олексійович, Черняк Микола Григорович
МПК: G01P 15/00
Мітки: акселерометр, компенсаційний
Формула / Реферат:
1. Компенсаційний акселерометр, що містить рознімний корпус з однією базовою настановною поверхнею, з розташованими в ньому рухомою пластиною чутливого елемента, встановленою на пружному підвісі, верхньою і нижньою магнітними системами, кожна з яких складається з магнітопроводу, постійного магніту і полюсного наконечника, причому магнітні системи в поєднанні з двома рухомими котушками, з'єднаними послідовно, розташованими на рухомій пластині...
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком
Номер патенту: 77449
Опубліковано: 15.12.2006
Автори: Лисий Микола Іванович, Шинкарук Олег Миколайович
МПК: G08B 13/18, G01V 1/28
Мітки: датчиком, спосіб, сейсмічного, волоконно-оптичним, сигналу, реєстрації
Формула / Реферат:
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком, який полягає в тому, що застосовують волоконно-оптичний датчик решітчастого типу для визначення амплітуди сейсмічного сигналу, який відрізняється тим, що застосовують волоконно-оптичний датчик решітчастого типу з лінійно наростаючою шириною прозорих штрихів тільки в одній решітці, і базуючись на періодичності функції оптичного пропускання такого датчика, з послідовності...
Трьохкомпонентний п’єзоелектричний акселерометр
Номер патенту: 47576
Опубліковано: 15.07.2002
Автори: Мусієнко Максим Павлович, Сарвар Іван, Шарапов Валерій Михайлович
МПК: H04R 17/00, G01P 15/09, G01L 1/16
Мітки: акселерометр, п'єзоелектричний, трьохкомпонентний
Формула / Реферат:
П'єзоелектричний акселерометр, що містить п'єзоелемент, основу та інерційні маси, який відрізняється тим, що основа виконана у вигляді частини кулі, на поверхні якої закріплений п'єзоелемент, який виконаний у вигляді сферичного сегмента з тілесним кутом з двома областями, поляризованими зустрічно, розміщеними аксіально і з'єднаними паралельно, при цьому на поверхні...
Трикомпонентний п’єзоелектричний акселерометр
Номер патенту: 31327
Опубліковано: 15.12.2000
Автори: Лукашенко Валентина Максимівна, Баранов Олексій Генадійович, Шеховцов Борис Анатолійович, Бикова Олена Валентинівна
МПК: G01H 11/00, G01P 15/09, G01V 1/16
Мітки: п'єзоелектричний, трикомпонентний, акселерометр
Формула / Реферат:
Трикомпонентний п'єзоелектричний акселерометр, що містить корпус, кубічну інерційну масу, з розташованими на її гранях п'єзоелементами, осі чутливості яких містяться на трьох взаємоперпендикулярних напрямках, перетинаючи центр кубічної інерційної маси, і систему кріплення інерційної маси до корпусу, виконану із п'яти клиноподібних затискувачів, закріплених кожний одними кінцями до корпусу з можливістю їх регулювання в напрямку, поперечному...
П’єзоелектричний акселерометр
Номер патенту: 46268
Опубліковано: 15.05.2002
Автори: Шарапов Валерій Михайлович, Ротте Сергій Вікторович, Лега Юрій Григорович, Мусієнко Максим Павлович, Саєнко Наталія Володимирівна
МПК: G01L 1/16, H04R 17/00, G01P 15/09
Мітки: п'єзоелектричний, акселерометр
Формула / Реферат:
П'єзоелектричний акселерометр, що містить чутливий елемент, який виконаний у вигляді біморфного елемента, що складається з п'єзоелемента і металевої мембрани, інерційної маси, яка закріплена на біморфному елементі, корпус, який відрізняється тим, що акселерометр обладнаний другим біморфним елементом, біморфні елементи закріплені в корпусі по твірній, інерційна маса розміщена між біморфними елементами і прикріплена до них з боку металевих...
Попередній патент: Гербіцидна композиція
Наступний патент: Спосіб припинення кровотечі з розриву печінки при закритій травмі живота
Випадковий патент: Шлакоутворююча суміш для безперервного розливу сталі